

An Adaptive Control Strategy with Switching Gain and Forgetting Factor for a Robotic Arm Manipulator



Abstract
1. Introduction
- The ASMC is implemented to overcome the limitations of conventional SMC, particularly in terms of robustness and chattering reduction.
- By dynamically adjusting the control gain, the ASMC enhances disturbance rejection capabilities while improving tracking accuracy.
- The proposed approach ensures precise trajectory tracking with reduced control effort, making it a more effective solution for robotic arm control.
- A novel adaptation law with a forgetting factor is proposed to prevent gain drift when the sliding surface becomes small.
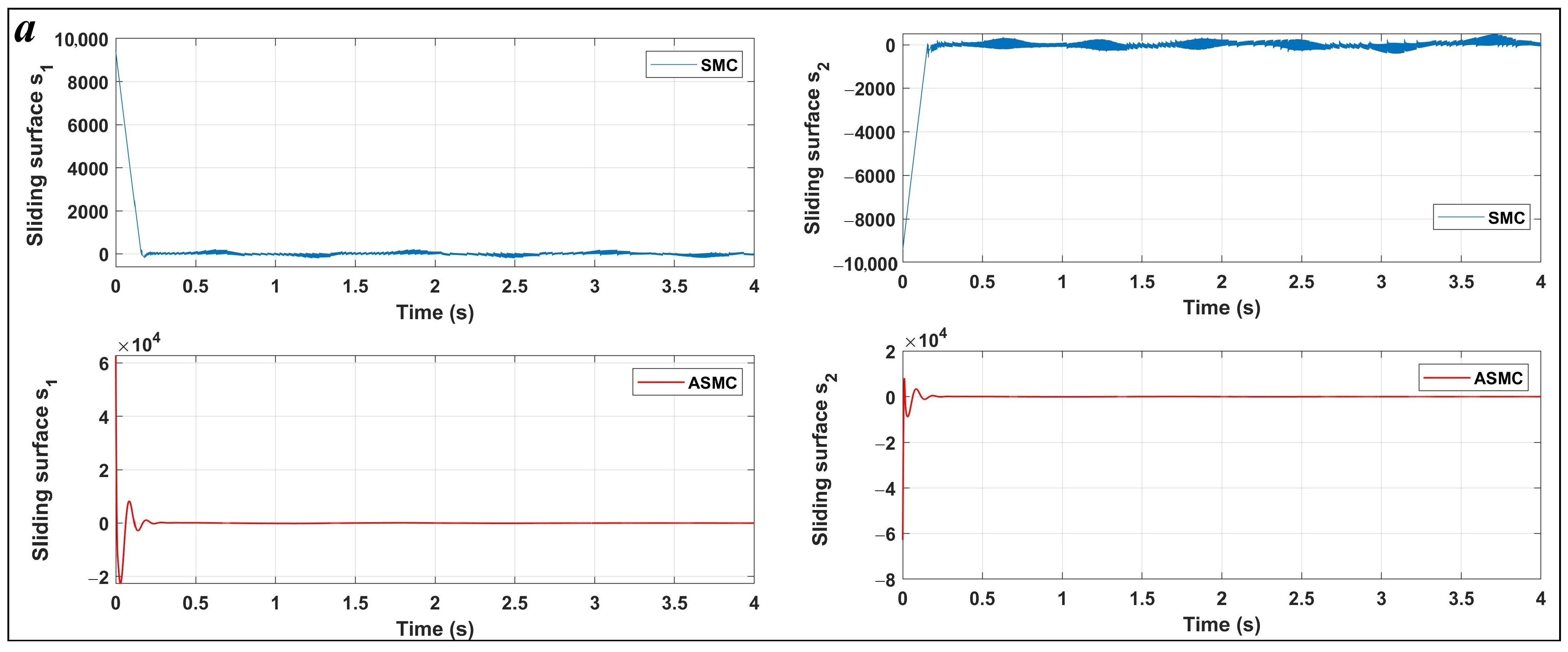
- The implication of the forgetting mechanism stabilizes the gain, avoids high-frequency oscillations, and improves controller reliability in practical implementations.
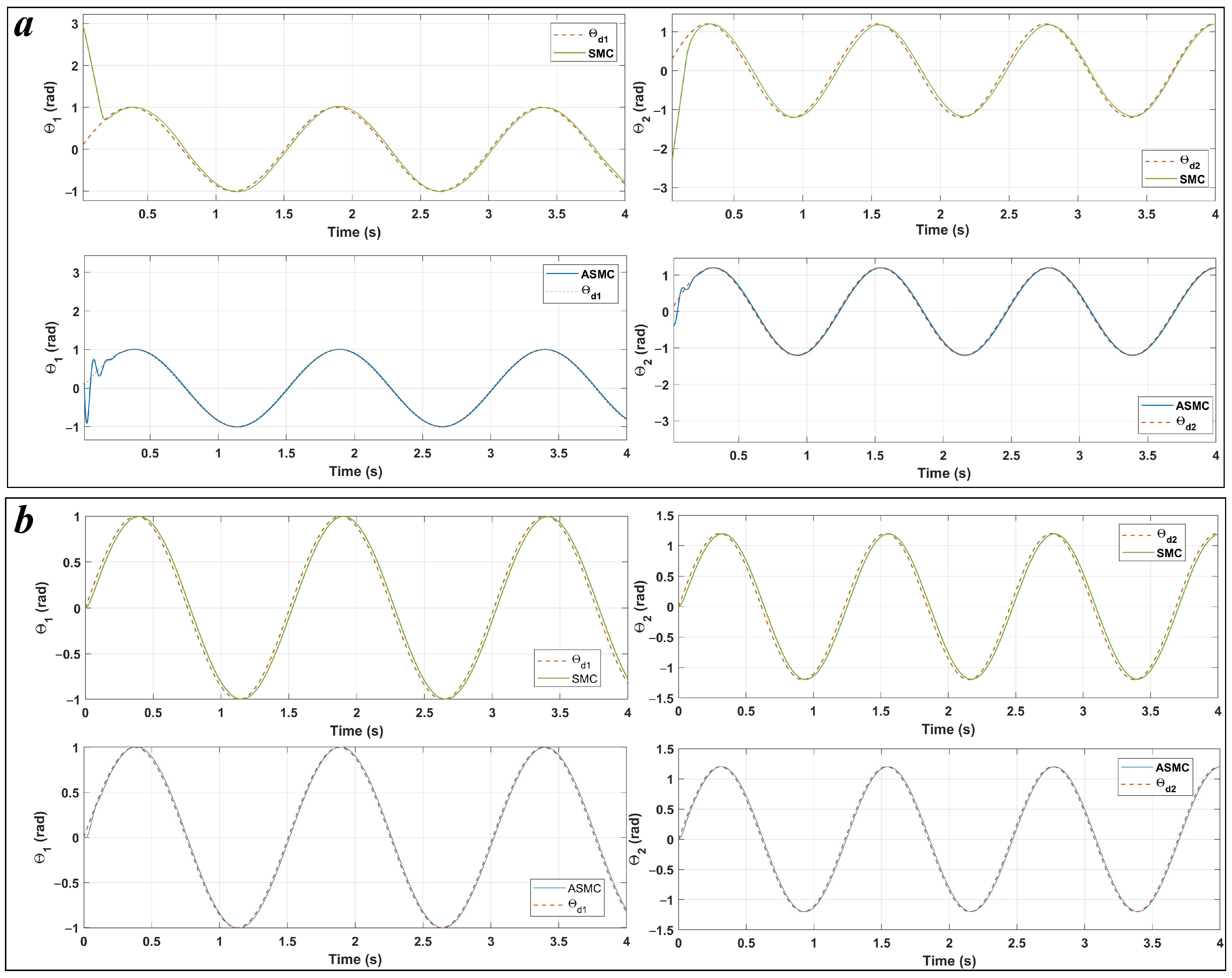
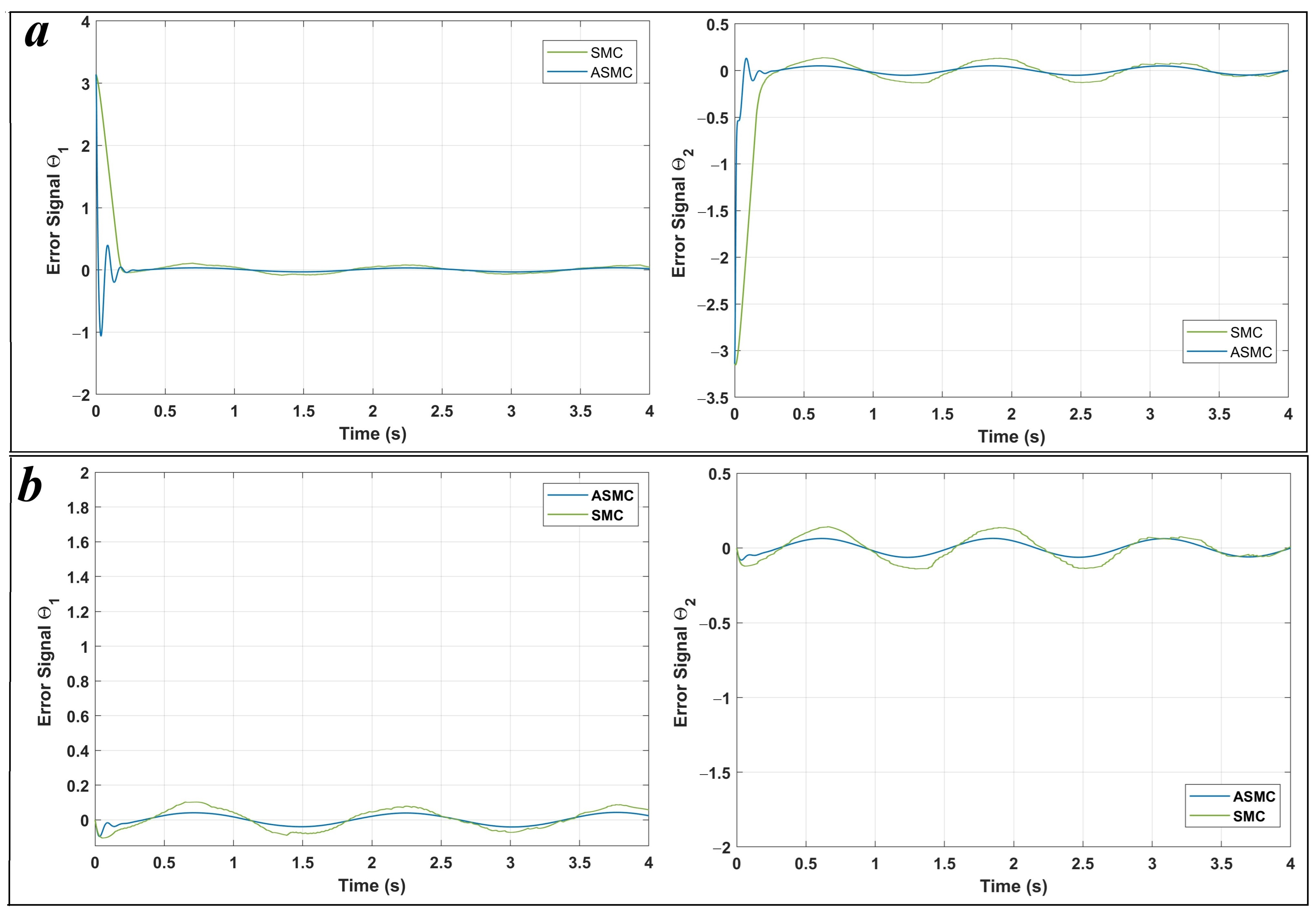
- Comparative simulations with traditional SMC demonstrate that the ASMC achieves superior performance in terms of tracking precision and robustness.
- The results confirm the effectiveness of the ASMC in addressing the drawbacks of conventional SMC.
2. Dynamic of a 2-DoF Arm Robot Manipulator

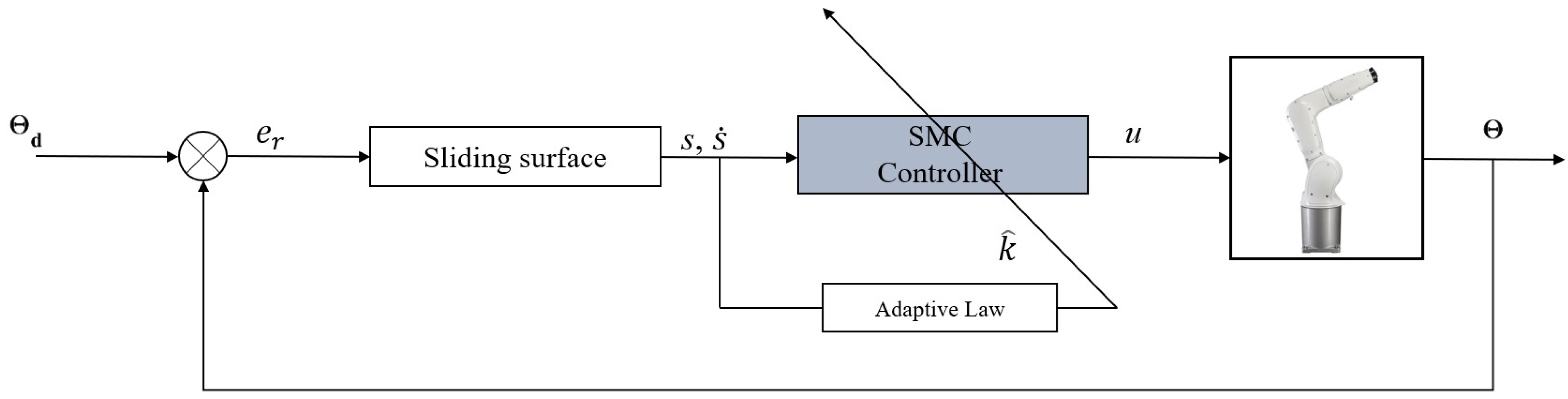
3. Control Design
3.1. Sliding Mode Control Scheme
3.2. Adaptive Sliding Mode Control
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2-DoF | 2-Degree-of-Freedom |
| ASMC | Adaptive Sliding Mode Control |
| SMC | Sliding Mode Control |
| PID | Proportional-Integral-Derivative |
| FLC | Fuzzy Logic Controller |
| APSO | Adaptive Particle Swarm Optimization |
| SPA | Social Spider Algorithm |
| HOSMC | High-Order Sliding Mode Control |
| NNC | Neural Network Control |
| ZN | Ziegler–Nichols |
| IMC | Internal Model Control |
| MPC | Model Predictive Control |
| MIMO | Multi-Input Multi-Output |
| DSSMC | Dual Surface Sliding Mode Controller |
| NFTSM | Non-Singular Fast Terminal Sliding Mode |
| WNN | Wavelet Neural Network |
| MRAC | Model Reference Adaptive Controllers |
| NFTSM | Non-Singular Fast Terminal Sliding Mode |
Appendix A
- where , , and .
References
- Billard, A.; Kragic, D. Trends and challenges in robot manipulation. Science 2019, 364, eaat8414. [Google Scholar] [CrossRef] [PubMed]
- Garriz, C.; Domingo, R. Development of trajectories through the kalman algorithm and application to an industrial robot in the automotive industry. IEEE Access 2019, 7, 23570–23578. [Google Scholar] [CrossRef]
- Nasrat, S.; Kang, T.; Park, J.; Kim, J.; Yi, S. Artistic robotic arm: Drawing portraits on physical canvas under 80 seconds. Sensors 2023, 23, 5589. [Google Scholar] [CrossRef]
- Ali, M.H.M.; Atia, M.R. A lead through approach for programming a welding arm robot using machine vision. Robotica 2022, 40, 464–474. [Google Scholar] [CrossRef]
- Hayakawa, S.; Wan, W.; Koyama, K.; Harada, K. A dual-arm robot that manipulates heavy plates with the support of a vacuum lifter. IEEE Trans. Autom. Sci. Eng. 2022, 20, 2808–2821. [Google Scholar] [CrossRef]
- Zhang, W.; Li, H.; Cui, L.; Li, H.; Zhang, X.; Fang, S.; Zhang, Q. Research progress and development trend of surgical robot and surgical instrument arm. Int. J. Med. Robot. Comput. Assist. Surg. 2021, 17, e2309. [Google Scholar] [CrossRef]
- Coloma, S.; Peralta, P.E.; Redondo, V.; Morono, A.; Vila, R.; Ferre, M. The effect of ionizing radiation on robotic trajectory movement and electronic components. Nucl. Eng. Technol. 2023, 55, 4191–4203. [Google Scholar] [CrossRef]
- Shakibjoo, A.D.; Shakibjoo, M.D. 2-DOF PID with reset controller for 4-DOF robot arm manipulator. In Proceedings of the 2015 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 29–31 May 2015; pp. 1–6. [Google Scholar]
- Adar, N.; Kozan, R. Comparison between real time PID and 2-DOF PID controller for 6-DOF robot arm. Acta Phys. Pol. A 2016, 130, 269–271. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A. A novel adaptive PID controller design for a PEM fuel cell using stochastic gradient descent with momentum enhanced by whale optimizer. Electronics 2022, 11, 2610. [Google Scholar] [CrossRef]
- Sung, S.W.; Lee, I.B. Limitations and countermeasures of PID controllers. Ind. Eng. Chem. Res. 1996, 35, 2596–2610. [Google Scholar] [CrossRef]
- Saha, S.; Amrr, S.M.; Saidi, A.S.; Banerjee, A.; Nabi, M. Finite-time adaptive higher-order SMC for the nonlinear five DOF active magnetic bearing system. Electronics 2021, 10, 1333. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Bencherif, A.; Barambones, O. Indirect Adaptive Control Using Neural Network and Discrete Extended Kalman Filter for Wheeled Mobile Robot. Actuators 2024, 13, 51. [Google Scholar] [CrossRef]
- Bristow, D.A.; Alleyne, A.G. A high precision motion control system with application to microscale robotic deposition. IEEE Trans. Control Syst. Technol. 2006, 14, 1008–1020. [Google Scholar] [CrossRef]
- Djaneye-Boundjou, O.; Xu, X.; Ordóñez, R. Automated particle swarm optimization based PID tuning for control of robotic arm. In Proceedings of the 2016 IEEE National Aerospace and Electronics Conference (NAECON) and Ohio Innovation Summit (OIS), Dayton, OH, USA, 25–29 July 2016; pp. 164–169. [Google Scholar]
- Wazzan, A.N.; Basil, N.; Raad, M.; Mohammed, H.K. PID controller with robotic arm using optimization algorithm. Int. J. Mech. Eng. 2022, 7, 3746–3751. [Google Scholar]
- Milind, J.S.; Arunkumar, G.; Manjunath, T. PID control of a double link (2-link) flexible robotic manipulator (2-DOF) in the 3 DE space. In Proceedings of the 2018 4th International Conference for Convergence in Technology (I2CT), Mangalore, India, 27–28 October 2018; pp. 1–7. [Google Scholar]
- Zakia, U.; Moallem, M.; Menon, C. PID-SMC controller for a 2-DOF planar robot. In Proceedings of the 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’sBazar, Bangladesh, 7–9 February 2019; pp. 1–5. [Google Scholar]
- Silva, F.; Batista, J.; Souza, D.; Lima, A.; dos Reis, L.; Barbosa, A. Control and identification of parameters of a joint of a manipulator based on PID, PID 2-DOF, and least squares. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 327. [Google Scholar] [CrossRef]
- Azar, A.T.; Serrano, F.E. Fractional order two degree of freedom pid controller for a robotic manipulator with a fuzzy type-2 compensator. J. Braz. Soc. Mech. Sci. Eng. 2019, 77–88. [Google Scholar]
- Mohammed, A.A.; El-Nagar, A.M.; Elsheikh, E.A.; El-Bardini, M. Embedded adaptive 2-DoF PID controller for robot manipulator using a supervisory fuzzy logic system. Menoufia J. Electron. Eng. Res. 2022, 31, 55–62. [Google Scholar] [CrossRef]
- Bi, M. Control of robot arm motion using trapezoid fuzzy two-degree-of-freedom PID algorithm. Symmetry 2020, 12, 665. [Google Scholar] [CrossRef]
- Tuan, H.M.; Sanfilippo, F.; Hao, N.V. A novel adaptive sliding mode controller for a 2-DOF elastic robotic arm. Robotics 2022, 11, 47. [Google Scholar] [CrossRef]
- Jouila, A.; Nouri, K. An adaptive robust nonsingular fast terminal sliding mode controller based on wavelet neural network for a 2-DOF robotic arm. J. Frankl. Inst. 2020, 357, 13259–13282. [Google Scholar] [CrossRef]
- Sun, Y.; Jiang, W.K. Research on Adaptive Fuzzy Backstepping Control Method of 2-DOF Manipulator. In Proceedings of the 2021 6th International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS), Oita, Japan, 25–27 November 2021; pp. 63–67. [Google Scholar]
- Rahmani, M.; Komijani, H.; Rahman, M.H. New sliding mode control of 2-DOF robot manipulator based on extended grey wolf optimizer. Int. J. Control Autom. Syst. 2020, 18, 1572–1580. [Google Scholar] [CrossRef]
- Hameed, W.N.; Khawwaf, J.O. Robust sliding mode control for 2-Dof robot manipulator position control system. IET Conf. Proc. 2024, 18, 282–288. [Google Scholar] [CrossRef]
- Balthazar, J.M.; de Oliveira, C.; da Rosa, R.A.; Gonçalves, G.; Lenzi, G.G.; Tusset, A.M. Efficiency comparative of linear controllers in positioning control of a robotic manipulator with two degrees of freedom. Math. Eng. Sci. Aerosp. (MESA) 2024, 15. [Google Scholar]
- Bingül, Z.; Karahan, O. A Fuzzy Logic Controller tuned with PSO for 2 DOF robot trajectory control. Expert Syst. Appl. 2011, 38, 1017–1031. [Google Scholar] [CrossRef]
- Girgis, M.E.; Nasr, A.E. Trajectory tracking of 2DOF robotic manipulator system based on adaptive exponential forgetting recursive least squares fractional-order PID control. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2024, 38, 09596518251322228. [Google Scholar] [CrossRef]
- Ramesh, R.; Mannan, M.A.; Poo, A. Tracking and contour error control in CNC servo systems. Int. J. Mach. Tools Manuf. 2005, 45, 301–326. [Google Scholar] [CrossRef]
- Kong, X.; Wang, L.; Yu, G.; Li, W.; Li, M. Research on servo matching of a five-axis hybrid machine tool. Int. J. Adv. Manuf. Technol. 2023, 129, 983–997. [Google Scholar] [CrossRef]
- Wang, L.; Kong, X.; Yu, G.; Li, W.; Li, M.; Jiang, A. Error estimation and cross-coupled control based on a novel tool pose representation method of a five-axis hybrid machine tool. Int. J. Mach. Tools Manuf. 2022, 182, 103955. [Google Scholar] [CrossRef]
- Hu, C.; Yao, B.; Wang, Q. Global task coordinate frame-based contouring control of linear-motor-driven biaxial systems with accurate parameter estimations. IEEE Trans. Ind. Electron. 2011, 58, 5195–5205. [Google Scholar] [CrossRef]
- Howard, I.S.; Ingram, J.N.; Wolpert, D.M. A modular planar robotic manipulandum with end-point torque control. J. Neurosci. Methods 2009, 181, 199–211. [Google Scholar] [CrossRef]
- Sachan, S.; Swarnkar, P. Intelligent fractional order sliding mode based control for surgical robot manipulator. Electronics 2023, 12, 729. [Google Scholar] [CrossRef]
- Song, Z.; Bao, D.; Wang, W.; Zhao, W. Adaptive Dynamic Boundary Sliding Mode Control for Robotic Manipulators under Varying Disturbances. Electronics 2024, 13, 900. [Google Scholar] [CrossRef]
- Sinha, S.; Nethi, A.; Jetta, M. Multiplicative Gaussian Noise Removal using Partial Differential Equations and Activation Functions: A Robust and Stable Approach. In Proceedings of the 7th International Conference on Algorithms, Computing and Systems, Larissa, Greece, 19–21 October 2023; pp. 161–170. [Google Scholar]
- Guo, K.; Shi, P.; Wang, P.; He, C.; Zhang, H. Non-singular terminal sliding mode controller with nonlinear disturbance observer for robotic manipulator. Electronics 2023, 12, 849. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A. Robust adaptive sliding mode control using stochastic gradient descent for robot arm manipulator trajectory tracking. Electronics 2024, 13, 3903. [Google Scholar] [CrossRef]
- Utkin, V.I.; Vadim, I. Sliding mode control. Var. Struct. Syst. Princ. Implement. 2004, 66, 1. [Google Scholar]
- Aydın, M. Real-Time Sliding Mode and Moving Sliding Mode Control of 3-DOF Linear Parallel Robot. Machines 2025, 13, 190. [Google Scholar] [CrossRef]
- Pan, C.; Wang, Y.; Yang, S.X.; Li, Z.; Xiao, J. Compensation Function Observer-Based Backstepping Sliding-Mode Control of Uncertain Electro-Hydraulic Servo System. Machines 2024, 12, 719. [Google Scholar] [CrossRef]
- Rabiee, H.; Mohammad, A.; Mohsen, E. Continuous nonsingular terminal sliding mode control based on adaptive sliding mode disturbance observer for uncertain nonlinear systems. Automatica 2019, 109, 108515. [Google Scholar] [CrossRef]
- Sun, H.; Gao, L.; Zhao, Z.; Li, B. Adaptive super-twisting fast nonsingular terminal sliding mode control with ESO for high-pressure electro-pneumatic servo valve. Control Eng. Pract. 2023, 134, 105483. [Google Scholar] [CrossRef]
- Zhu, J.; Khayati, K. Adaptive sliding mode control with smooth switching gain. In Proceedings of the 2014 IEEE 27th Canadian Conference on Electrical and Computer Engineering (CCECE), Toronto, ON, Canada, 4–7 May 2014; pp. 1–6. [Google Scholar]
- Silaa, M.Y.; Bencherif, A.; Barambones, O. A novel robust adaptive sliding mode control using stochastic gradient descent for PEMFC power system. Int. J. Hydrogen Energy 2023, 48, 17277–17292. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Kokotovic, P.V. Instability analysis and improvement of robustness of adaptive control. Automatica 1984, 20, 583–594. [Google Scholar] [CrossRef]
- Ioannou, P.A. Adaptive control of linear time-invariant systems. In Encyclopedia of Systems and Control; Springer International Publishing: Cham, Switzerland, 2021; pp. 6–11. [Google Scholar]
- Nasir, M.; Maiti, A. Adaptive sliding mode resilient control of multi-robot systems with a leader–follower model under byzantine attacks in the context of the industrial Internet of things. Machines 2024, 12, 205. [Google Scholar] [CrossRef]
- Mo, X.; Lan, Q. Finite-Time Integral Sliding Mode Control for Motion Control of Permanent-Magnet Linear Motors. Math. Probl. Eng. 2013, 2013, 567610. [Google Scholar] [CrossRef]
- Jin, M.; Lee, J.; Chang, P.H.; Choi, C. Practical nonsingular terminal sliding-mode control of robot manipulators for high-accuracy tracking control. IEEE Trans. Ind. Electron. 2009, 56, 3593–3601. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ASMC | SMC |
|---|---|---|
| Desired trajectory | ||
| Desired trajectory | ||
| Initial values (Case 1) | , , , | |
| Initial values (Case 2) | , , , | |
| Forgetting factor | 20 | - |
| Learning rate | - | |
| Initial adaptive gain K | - | |
| - | 900 | |
| 8000 | 3000 | |
| 200 | 60 | |
| Metric | ASMC | SMC | Improvement (%) |
|---|---|---|---|
| , | |||
| RMSE | |||
| RMSE | |||
| ITAE | |||
| ITAE | |||
| IAE | |||
| IAE | |||
| ISE | |||
| ISE | |||
| , | |||
| RMSE | |||
| RMSE | |||
| ITAE | |||
| ITAE | |||
| IAE | |||
| IAE | |||
| ISE | |||
| ISE | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silaa, M.Y.; Barambones, O.; Bencherif, A.; Rougab, I. An Adaptive Control Strategy with Switching Gain and Forgetting Factor for a Robotic Arm Manipulator. Machines 2025, 13, 424. https://doi.org/10.3390/machines13050424
Silaa MY, Barambones O, Bencherif A, Rougab I. An Adaptive Control Strategy with Switching Gain and Forgetting Factor for a Robotic Arm Manipulator. Machines. 2025; 13(5):424. https://doi.org/10.3390/machines13050424
Chicago/Turabian StyleSilaa, Mohammed Yousri, Oscar Barambones, Aissa Bencherif, and Ilyas Rougab. 2025. "An Adaptive Control Strategy with Switching Gain and Forgetting Factor for a Robotic Arm Manipulator" Machines 13, no. 5: 424. https://doi.org/10.3390/machines13050424
APA StyleSilaa, M. Y., Barambones, O., Bencherif, A., & Rougab, I. (2025). An Adaptive Control Strategy with Switching Gain and Forgetting Factor for a Robotic Arm Manipulator. Machines, 13(5), 424. https://doi.org/10.3390/machines13050424