Abstract
This paper provides a comprehensive review of the current state of research on robotic technologies in sports, with a specific emphasis on skiing. Using a systematic review methodology, I conducted an extensive search for relevant academic articles and conference papers across several databases, including Scopus, Web of Science, and IEEE. A predefined set of keywords guided the search process, leading to an initial collection of 327 papers. After applying specific selection criteria, 24 studies were identified as most relevant to the topic. These selected works were analyzed in detail, covering various key aspects of robotics in skiing, from biomechanical modeling to robotic ski systems. The findings underscore the growing interest in this interdisciplinary field while also highlighting significant research gaps, particularly in stability control, real-time terrain perception, and snow–surface interaction. Overall, the review concludes that while promising developments exist, the field is still in its early stages and would benefit greatly from interdisciplinary collaboration and more robust real-world experimentation.
1. Introduction
Robots, as intelligent machines capable of sensing, processing information, and executing complex tasks, have transformed many industries and fields where human effort is required [1]. Advanced algorithms and control systems direct these sophisticated mechanical systems that represent the ultimate achievements of human engineering innovation. Although it is obvious that the world of sports and athletics has traditionally been dominated by the remarkable physical feats and capabilities of human beings, pushing the limits of what is possible through intense training, dedication, and willpower, a change has occurred in this sector as well. Specifically, in recent years, the emergence of advanced robotic systems has begun to redefine the limits of achievement in various sports fields, such as winter sports, especially skiing [2].
Given that skiing, a sport that requires exceptional balance, agility, and control, has historically been the exclusive domain of highly skilled human athletes, it is particularly interesting to note that researchers, inspired by this sport, have made efforts to develop robotic systems. These robots aim not only to imitate the movements and techniques of human skiers but also to surpass human performance in certain aspects [3].
One such example is the development of “skiing robots”, which are autonomous systems that are capable of navigating complex ski slopes, carving turns, and even competing in events like giant slaloms [4,5]. These robotic systems are equipped with advanced sensors, control systems, and algorithms that allow them to perceive their surroundings, maintain balance, and make rapid decisions while navigating the terrain. Thus, the potential of these robotic systems to improve skiing performance is high. They can not only perform the basic maneuvers of skiing but can also actively balance and control the pitch and roll of their skis to maintain stability on uneven surfaces [6]. This advanced control enables robots to navigate slopes more dynamically, mimicking the adaptive strategies used by human skiers.
Moreover, robot-based research offers several key advantages for studying skiing techniques. As highlighted in [7], the precise control over joint angles, forces, and movement trajectories allows researchers to program and fine-tune specific movement sequences, replicate the skiing styles and biomechanics of human athletes for in-depth performance analysis, develop and test new skiing techniques, and conduct controlled experiments on the influence of different ski equipment designs, materials, and settings. This approach not only accelerates the development of more efficient skiing methods but also supports advancements in sports science, equipment optimization, and even rehabilitation technologies for injured athletes looking to regain their skiing form.
Despite the growing interest in robotic applications in various sports fields, there are significant research gaps, particularly in the field of skiing robotics. While Erdmann has broadly outlined potential areas for the development of biomechanics-based sports robots [8], the specific application to ski technologies remains underdeveloped. In particular, there is limited research addressing the unique challenges of robotic locomotion on snow and ice surfaces, which present distinct friction and stability considerations compared to standard locomotion research.
Although Zheng et al. [9] have investigated humanoid robots walking on rough surfaces and proposed a ski-type gait, comprehensive studies specifically focused on robotic skiing mechanics are scarce. The dynamic nature of ski terrain requires specialized approaches to balance, trajectory planning, and energy efficiency that differ significantly from those used in traditional robotics applications. Furthermore, while Yin et al. [10] have demonstrated successful robotic applications in curling during the Beijing 2022 Winter Olympics, skiing presents significantly more complex biomechanical challenges due to its three-dimensional movement patterns, variable terrain, and higher speeds. The biomechanical modeling required for effective skiing robots has not been thoroughly explored in the literature.
Another notable gap is the lack of standardized testing methodologies for evaluating skiing robot performance. Unlike other robotic sports applications such as table tennis [11], where success metrics are well defined, skiing presents unique evaluation challenges due to its subjective performance elements and variable environmental conditions.
Finally, while technological advances continue to improve robotic capabilities, Riener [12] noted that humanoid robotics still lag behind human versatility and dexterity, particularly in complex locomotion tasks. This gap is especially pronounced in skiing, where the integration of perception, decision-making, and physical execution must occur rapidly in a dynamic environment.
Building on these identified gaps, this study aims to provide a perspective on research and innovative approaches for developing robotic solutions in skiing, addressing the unique challenges and the potential benefits of them for this winter sport. The paper is an extended version of “Enhancing Efficiency and Performance: Robotic Applications in Skiing” presented at the Fifth Winter IFSA Conference on Automation, Robotics, and Communications for Industry 4.0/5.0 (ARCI’ 2025) [13]. The original work has been expanded with additional related work, research gap analysis, and a deeper exploration of robotic applications in skiing environments.
Despite growing interest in robotic applications in sports, the specific field of skiing robotics remains fragmented and lacks a consolidated overview of its technical challenges, research gaps, and practical potential. The motivation behind this review is to systematically synthesize the available knowledge, highlight the critical issues limiting progress, and outline concrete application areas and development directions. In this way, this study aims to provide a structured foundation for future research efforts, bridging gaps between robotics, biomechanics, sports engineering, and rehabilitation technologies related to skiing.
The structure of this paper is as follows: Section 2 reviews prior work related to robotic technologies in sports. Section 3 outlines the systematic methodology used to identify and select relevant studies. Section 4 presents and discusses the results, including publication trends, research topics, robotic systems, and identified challenges. Finally, Section 5 concludes this paper by summarizing key findings and outlining future directions for research in skiing robotics.
2. Related Work
2.1. Robotics in Sports: An Overview
The intersection of robotics and sports has gained considerable attention in recent years. Erdmann outlined various applications of robots in sports, including serving balls, assisting in training, substituting humans during practice, participating in competitions, serving as models for performance analysis, and supporting event organizers [8]. This work underscores the transformative potential of robotics across multiple facets of sports.
Building on this, Siegel and Morris explored how robotics and automation are redefining the sports experience—not only enhancing athlete performance but also revolutionizing fan engagement and paving the way for entirely new competitive formats [14]. They examined diverse applications, including immersive fan experiences, automated refereeing, robotic athletes, and advancements in motorsports. Their analysis balanced technological innovation with the importance of preserving the emotional, human essence that makes sports captivating.
Hu et al. contributed to this growing field by focusing on game motion robots powered by gait recognition algorithms [15]. Their research demonstrated how such systems can capture detailed, real-time data on athlete movements, improving training precision and playing a key role in injury prevention. This approach reflects a shift toward using robotics not merely as training aids but as sophisticated, data-driven performance enhancers.
Together, these studies reveal a future where robotics in sports extends beyond automation, evolving into an intelligent, adaptive force that supports athletes, enriches fan experiences, and keeps the spirit of competition alive.
2.2. Robotic Locomotion on Ice and Snow
Research on robotic locomotion on slippery surfaces provides valuable insights for skiing robotics. Iverach-Brereton et al. described the development of a gait to allow a small humanoid robot to propel itself on ice skates across a smooth surface [16]. Their work with both ice skates and inline skates demonstrated that a new gait relying entirely on motion in the frontal plane allowed the robot to traverse ice surfaces more stable than classic inverted pendulum-based walking gaits when using the same skates.
Yin et al. designed and manufactured a hexapod curling robot that imitates human kicking, sliding, pushing, and curling rock rotating, which completed a successful demonstration during the Beijing 2022 Winter Olympics Games [10]. This robot’s morphology transformation based on leg configuration switching allowed smooth transitions between walking and throwing tasks, demonstrating potential applications for adaptive robotic systems in winter sports environments.
Zheng et al. [9] investigated how humanoid robots can walk on rough surfaces, proposing new walking patterns including a “step-over” gait and a ski-type gait as global approaches to maintain stability while using compliant motion to solve the robust foot-holding problem. This research provides foundational approaches that could be adapted specifically for skiing robots.
2.3. Philosophical and Comparative Perspectives
The potential participation of robots in sports raises interesting philosophical questions. In this way, Lopez Frias and Pérez Triviño addressed the philosophical and ethical implications, drawing on existing discussions about the nature of sports and athletic skill [17]. The authors argue that for robots to truly engage in sports, they would need (a) the ability to comprehend their environment and exhibit intentional states; (b) a drive to excel and a playful, competitive spirit, a “ludic attitude” that embraces the joy of overcoming challenges; and (c) a physical form that embodies vulnerability, making them admirable, much like human athletes. Furthermore, ethical concerns about fairness arise when considering the direct competition between robots and human athletes. Robots, potentially exceeding human physical capabilities through optimized design and artificial intelligence, could challenge the fundamental principles of equal opportunity and natural human performance that underpin competitive sports [17,18].
Building on this, the notion of robots truly comprehending their environment and exhibiting intentional states is complex. While current entertainment fitness robots can perceive a user’s actions and respond accordingly using action recognition [19], and robots in development for sports like soccer utilize sensors to perceive their environment, the question of genuine intentionality remains. Riener et al. note that robots can move, perceive, and communicate but currently lack an emotional spectrum, such as feelings of happiness or frustration [12], which are deeply intertwined with human intentionality and comprehension. Trenchard argues that for robots to truly demonstrate human-level intelligence, they must exhibit self-organized behaviors like the invention of team sports, which implies a level of understanding beyond mere programmed responses [18]. This would necessitate robots deciding to create their own games involving competition and cooperation, potentially arising from an intrinsic capacity to compete and cooperate for resources and sufficient leisure time.
In terms of physical design, while robotic actuators can surpass human muscles in specific functions, they often do so at the expense of added size and weight, which can reduce agility and versatility [12]. Additionally, human athletic ability is shaped by unique biological and evolutionary processes, influencing how we perceive and admire physical skill. For robots to attain human-level intelligence, they must evolve through similar conditions and processes as humans. Their physical existence and interactions are essential in shaping the philosophical understanding of their “athleticism” [18].
This growing body of interdisciplinary research—spanning robotics, biomechanics, machine learning, and sports science—sets the foundation for a structured exploration of how robotics can be applied specifically to skiing. The following section outlines the systematic methodology used to identify, evaluate, and synthesize relevant studies in this domain.
2.4. Robotic Technologies in Skiing
The use of robotics in skiing is a niche yet rapidly advancing research domain. Early explorations focused on passive robotic systems that mimicked basic skiing maneuvers for understanding the dynamics of carved turns [7]. More recent advancements involve active skiing robots equipped with sophisticated control algorithms, perception systems, and articulated joints to navigate complex ski slopes and replicate or even enhance human skiing techniques.
Notable developments include humanoid robots like RoK-2 and DIANA, which are designed to autonomously ski through slalom gates, using real-time vision systems and stability control frameworks to maintain dynamic balance [4,20]. These robots typically integrate LiDAR sensors, vision modules, and inertial measurement units (IMUs) to perceive terrain and adjust body posture accordingly.
Researchers have proposed various control strategies to ensure stability during high-speed descents. Methods such as Zero Moment Point (ZMP) control and hybrid reflexive mechanisms are used to stabilize humanoid robots in unpredictable terrain conditions [5,21]. The use of reinforcement learning for adaptive control has also emerged, enabling robots to learn optimal skiing strategies through trial-and-error in simulated environments before real-world deployment [22].
A major research focus is the replication of human skiing biomechanics in robotic systems. Movements such as knee flexion–extension and hip abduction–adduction are critical for balance and maneuverability during skiing. Robotic platforms attempt to reproduce these motions using actuated joints and compliant mechanisms [4,7,23].
In alpine skiing, robots must adapt to changes in slope gradient and snow texture. Lower-body robotic platforms have been developed to fine-tune ski edge angles and weight distribution, key for executing carved turns. These robots use servo motors to emulate joint kinematics and maintain posture during dynamic turns, closely mirroring human biomechanics.
Autonomous skiing robots must detect and respond to obstacles such as gates, terrain irregularities, and other skiers. Vision-based systems, often enhanced by deep learning algorithms, are employed for real-time gate recognition and path planning [20]. Multi-modal sensor fusion, combining LiDAR and computer vision, improves environmental awareness and enables precise trajectory adjustments during descent.
Obstacle avoidance strategies have been proposed for various skiing scenarios, including freestyle and alpine racing. For example, six-legged skiing robots demonstrate enhanced stability and versatility across flat, downhill, and uphill terrains, using gait adaptation to maneuver around dynamic obstacles [24].
2.5. Novel Robotic Platforms
Recent review studies have highlighted key trends and challenges in the development of mobile and sports-oriented robotic systems. García and Duarte analyzed the adaptation of mobile ground robots in outdoor environments, identifying terrain variability and real-time perception as critical challenges [25]. Hu et al. surveyed the evolution of game sports robots, emphasizing performance optimization in dynamic conditions [15]. Ju et al. discussed broader trends in sports rehabilitation robotics for elderly patients [26]. Wu et al. presented the theoretical research and engineering development of legged robots by examining key technologies, walking mechanisms, dominant models, and techniques and discussing applications and challenges [27]. Another review paper explored the design, locomotion, actuation, and control of soft-legged robots for diverse environments, highlighting their adaptability, efficiency, and potential in rescue, military, and space applications [28].
Building upon these insights, several novel robotic platforms have emerged. Bakırcıoğlu et al. [29] and Chambers et al. [30] developed hydraulic and adaptive leg mechanisms that enhance mechanical robustness and energy efficiency, essential for stability on slopes. Chen et al. [31] and Cui et al. [32] proposed soft and tensegrity-based robots, respectively, offering compliance and resilience suitable for variable snow conditions. Marcus et al. [33] presented a novel walking algorithm for quadruped robots that use reinforcement learning for adaptable movement in hazardous, unstructured environments. Wang et al. [34] developed a six-legged skiing robot that emulates human techniques for stable cross-country skiing on complex snow, using terrain estimation and balance control.
AI and control innovations have also advanced robotic capabilities. Afzal et al. explored the potential of integrating artificial intelligence with animal-inspired robots to revolutionize wildlife study and enable more effective ecological conservation strategies [35]. Nguyen and Kim [36] introduced fixed-time control methods for rapid stability achievement. Xue et al. [14] developed a force-position hybrid control for quadruped robots to enhance stability and adaptability on complex terrain [37]. Khan et al. presented a multi-agent reinforcement learning controller for a wheel-legged robot to enable autonomous learning of various gaits and robust control [38].
Exoskeletal and modular robotic designs have been introduced to enhance adaptability. Jamali et al. developed a portable hybrid soft-cable knee exoskeleton for rehabilitation [39], while Ma et al. presented a quantitative method for evaluating lower limb exoskeleton training effectiveness by integrating electrophysiological and kinematic data through synergistic indicators [40]. Marchesi et al. contributed to rehabilitation robotics, emphasizing trunk control, which could inform the development of balance-assisting skiing robots [41].
Li et al. proposed a dynamic modeling strategy to enhance the performance of industrial robots [42], while Zhang et al. introduced a Bayesian kinematic calibration method to identify joint variables in industrial robots while accounting for uncertainty, improving positioning accuracy and enabling robust trajectory predictions [43].
This growing body of interdisciplinary research, spanning robotics, biomechanics, machine learning, and sports science, sets the foundation for a structured exploration of how robotics can be applied specifically to skiing. The following section outlines the systematic methodology used to identify, evaluate, and synthesize relevant studies in this domain.
3. Methodology
The systematic review was designed to ensure a comprehensive and transparent exploration of the role of robotics in skiing. Following the PRISMA guidelines [44], the methodology ensured clarity and reproducibility, covering all stages, from the initial search to data extraction and analysis, to capture the most relevant and high-impact studies on this emerging topic.
3.1. Search Strategy
This literature search was conducted on 26 August 2024, utilizing three leading electronic databases: Scopus, Web of Science, and IEEE Xplore, chosen for their extensive coverage of scientific and technical literature. To cast a wide net while ensuring precision, this search employed a combination of keywords and Boolean operators:
(robot* OR robotics) AND (skiing OR ski OR “ski training”)
These terms targeted the title, abstract, and keywords fields, ensuring the inclusion of articles explicitly mentioning robotics within the context of skiing. The wildcard symbol (*) captured variations of “robot”—including “robots” and “robotics”—to accommodate diverse terminology across disciplines and regions.
This approach aimed to capture a broad spectrum of studies, ranging from theoretical explorations and algorithmic advancements to practical implementations of robotic systems in skiing. The intent was not only to gather data on existing robotic technologies but also to identify research gaps and future directions.
3.2. Eligibility Criteria
To ensure the inclusion of high-quality and contextually relevant studies, strict eligibility criteria were established:
- ▪
- Inclusion criteria:
- Studies focusing on robots or robotic systems specifically within skiing contexts (e.g., training, performance analysis, or autonomous skiing);
- Peer-reviewed journal articles or conference proceedings, ensuring scientific rigor and credibility;
- No restrictions on publication date, allowing the review to encompass both foundational studies and the latest advancements.
- ▪
- Exclusion criteria:
- Non-research documents, such as books, reviews, editorials, or communications, that lacked original empirical data;
- Duplicate records retrieved from multiple databases;
- Papers unrelated to skiing or studies that mentioned robotics but lacked direct application to skiing;
- Non-English articles or studies unavailable in full text, ensuring accessibility and comprehensibility.
This balanced approach preserved the integrity of the review by prioritizing scientific contributions while filtering out irrelevant, redundant, or inaccessible content.
3.3. Study Selection Process
The selection process unfolded in a series of systematic stages designed to progressively refine the dataset:
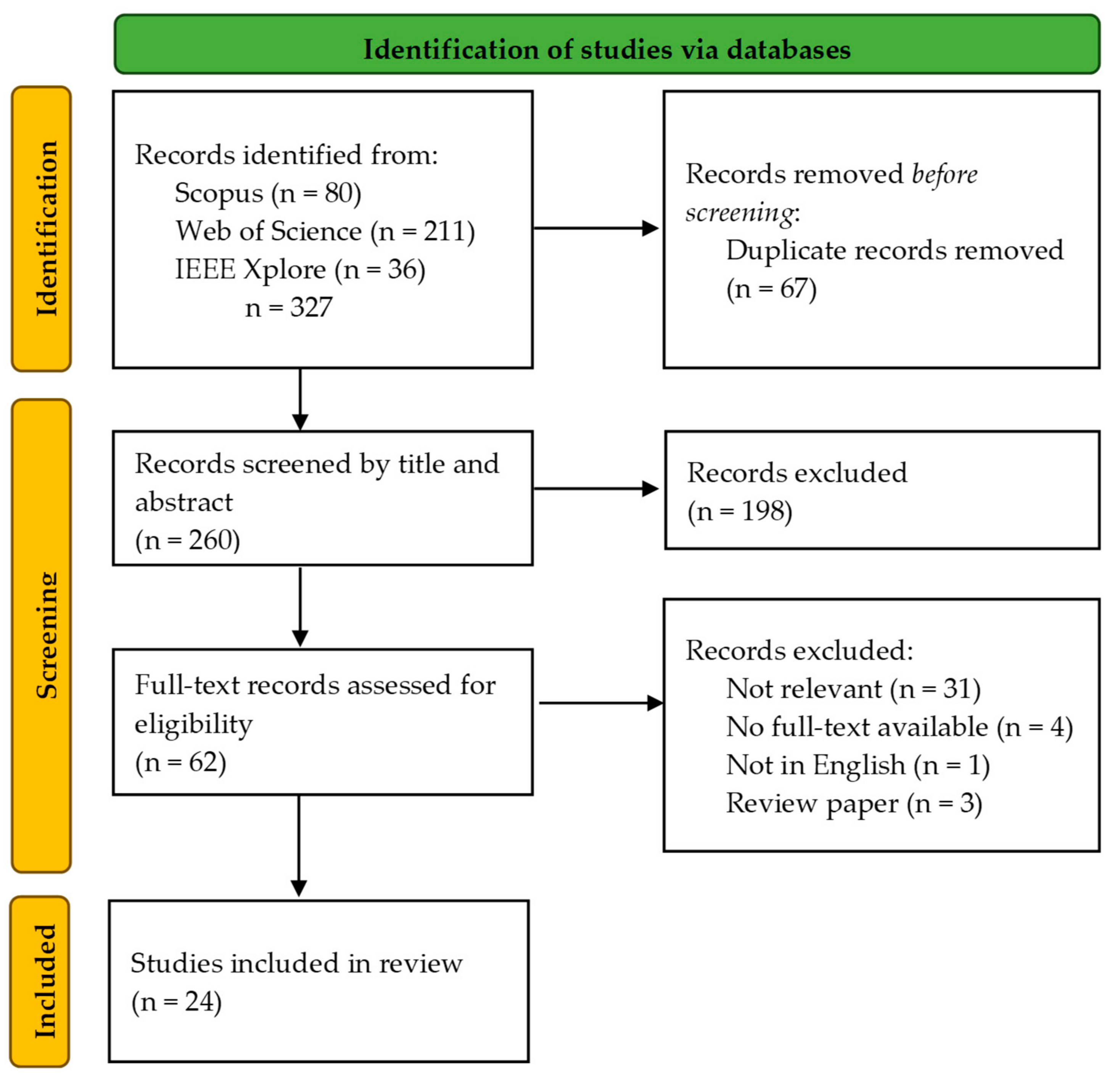
- Initial search results: A total of 327 documents matched the search criteria across all databases.
- Duplicate removal: 67 duplicate entries were identified and excluded to prevent redundancy, ensuring each study was counted only once.
- Title and abstract screening: Next, a preliminary screening of titles and abstracts was performed. Articles that failed to mention robotics or skiing in a meaningful, research-driven context were eliminated. This step resulted in the exclusion of 198 papers, many of which referenced skiing metaphorically or focused on unrelated robotic applications.
- Full-text review: The remaining 62 articles underwent an in-depth, full-text evaluation. This stage assessed the relevance, scientific rigor, and accessibility of each study. A total of 38 papers were excluded due to the following reasons:
- Emphasis on unrelated robotic applications or sports;
- Full-text inaccessibility;
- Non-English language;
- Being classified as review papers rather than original research.
At the conclusion of this process, 24 articles met the eligibility criteria, offering a robust and focused body of literature to support this study’s objectives.
Figure 1 visually presents the PRISMA-based study selection process, illustrating the systematic progression from initial search to final inclusion.
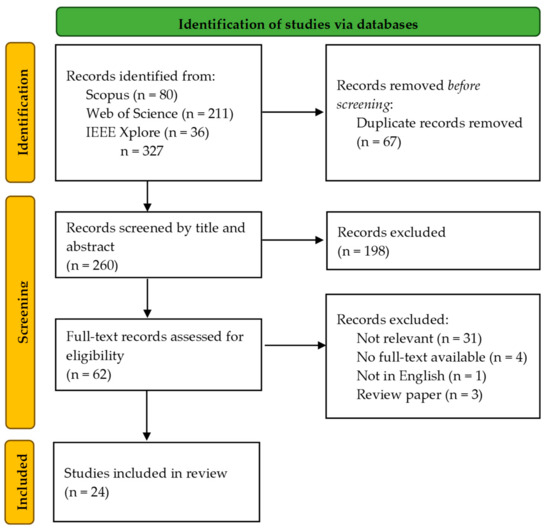
Figure 1.
PRISMA-based research process diagram.
3.4. Data Extraction and Analysis
The final stage involved extracting detailed data from the remaining 24 articles. To ensure accuracy and consistency, EndNote 20.6 was employed for reference management and citation tracking. Each article was scrutinized, and key information was transferred into a structured Excel spreadsheet for streamlined analysis.
The extracted data encompassed years of publication, sources, authors, affiliations, citations, keywords, study objectives and topics, robotic system types, technologies, software, and limitations.
This structured approach allowed for comprehensive cross-study comparisons, highlighting recurring themes, emerging trends, and unresolved challenges.
3.5. Quality and Bias Assessment
Given the niche nature of robotics in skiing, the current body of literature remains limited. As a result, this study prioritized capturing a comprehensive overview of existing research rather than applying strict quality and bias assessments, which could have further reduced the already small pool of eligible studies. Implementing standardized evaluation frameworks, such as the Critical Appraisal Skills Program (CASP) [45] or Cochrane Risk of Bias (RoB) [46], might enhance the reliability of future reviews. However, in this context, such criteria would likely have excluded a significant portion of the remaining studies, potentially limiting insights into this emerging field.
While this review refrains from formal quality scoring, the inclusion criteria ensured that only peer-reviewed, research-based contributions were selected, preserving a baseline level of academic rigor. Future research efforts should aim to expand the knowledge base, allowing for more comprehensive quality assessments without the risk of losing valuable, albeit preliminary, findings.
4. Results and Discussion
A comprehensive database was developed based on the results that met the established inclusion criteria. This database was structured to capture key information across several categories: (i) the year of publication, (ii) the type of publication (journal or conference), (iii) the country of origin of the research, (iv) the authors and their respective affiliations, (v) citation counts to assess the impact of the papers, (vi) the keywords used in the studies, (vii) the main research topics covered, (viii) the specific aims of the research, and (ix) the types of robots involved in the studies. This systematic approach allowed for a detailed and organized overview of the relevant literature in the field.
4.1. Years of Publication and Sources
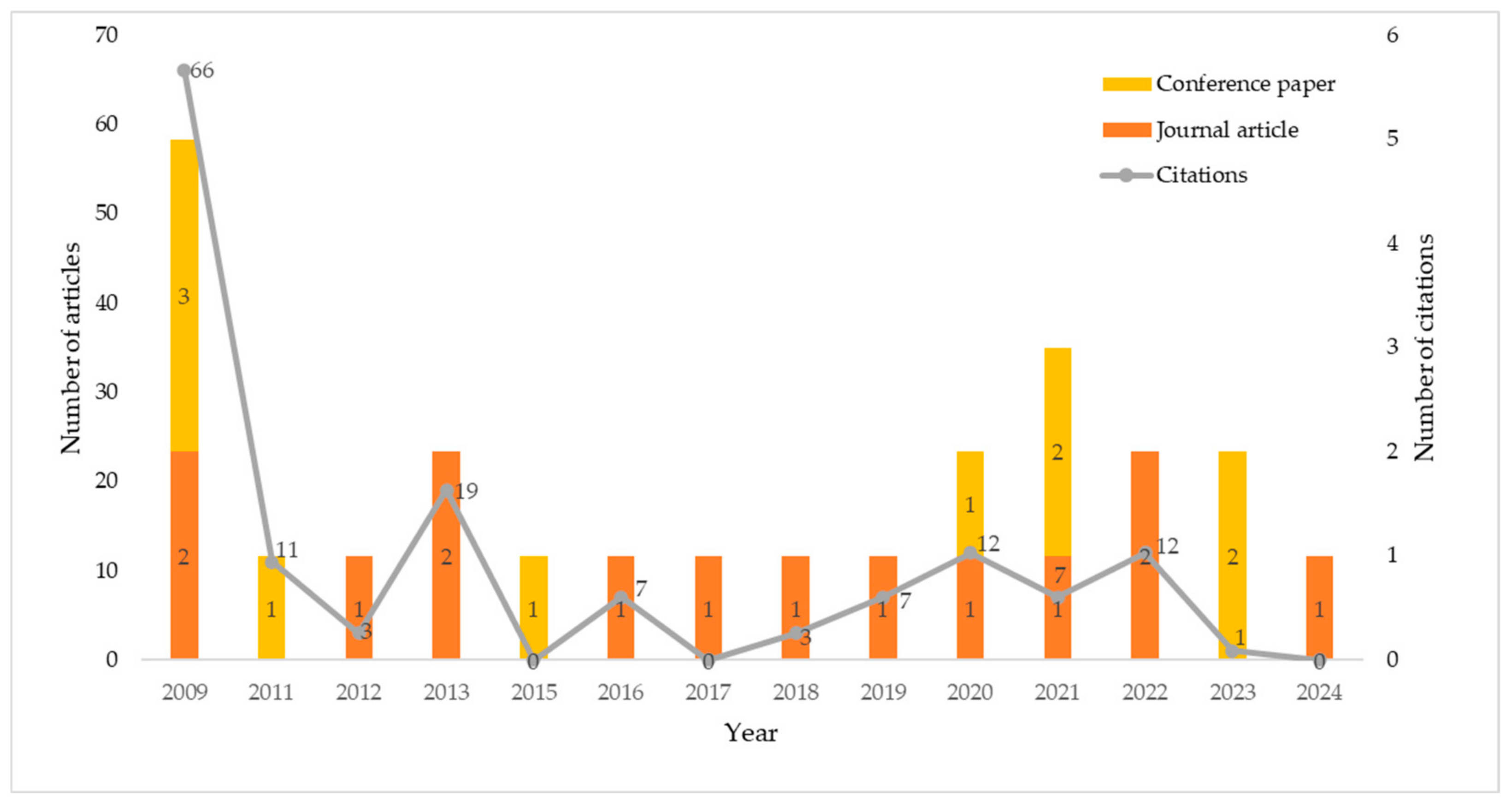
Figure 2 offers a chronological visualization of the reviewed papers, categorizing them by year of publication and type (journal or conference proceeding). The timeline begins with the earliest identified work from 2009, which also emerged as the most prolific year, with five publications—a notable surge in comparison to other years. Following this, the field saw a steady trickle of one to two publications annually, reaching a minor peak in 2020 with three papers. It is worth highlighting that this analysis reflects data gathered by August 2024; any research published after this date was not included.
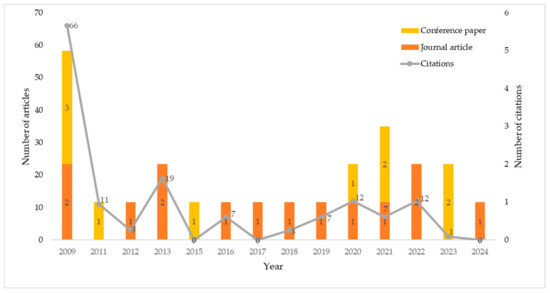
Figure 2.
Distribution of analyzed papers by publication type and year.
Additionally, Figure 2 illustrates the total number of citations these papers accumulated per year, providing insight into the broader academic influence and visibility of the topic over time.
In terms of publication sources, the majority of contributions (14 articles, representing 58.33%) appeared in peer-reviewed journals, reflecting a baseline of academic rigor. The remaining 10 studies (41.67%) were published in conference proceedings, indicating active discussion within scientific communities. Among journals, Sensors emerged as the most frequent publisher, contributing three articles to the field. On the conference side, the IEEE/RSJ International Conference on Intelligent Robots and Systems and the International Conference on Intelligent Robotics and Applications each featured two papers across different years, while other conferences contributed one article each.
This distribution highlights that, despite the relatively small number of studies, research on skiing robotics spans reputable and diverse publication venues, combining theoretical advances with practical developments discussed at leading robotics conferences. Table 1 presents an overview of the selected articles based on their publication year, country of origin, and source names.

Table 1.
Summary of selected articles by publication year, country, and source.
4.2. Countries, Authors, and Institutions
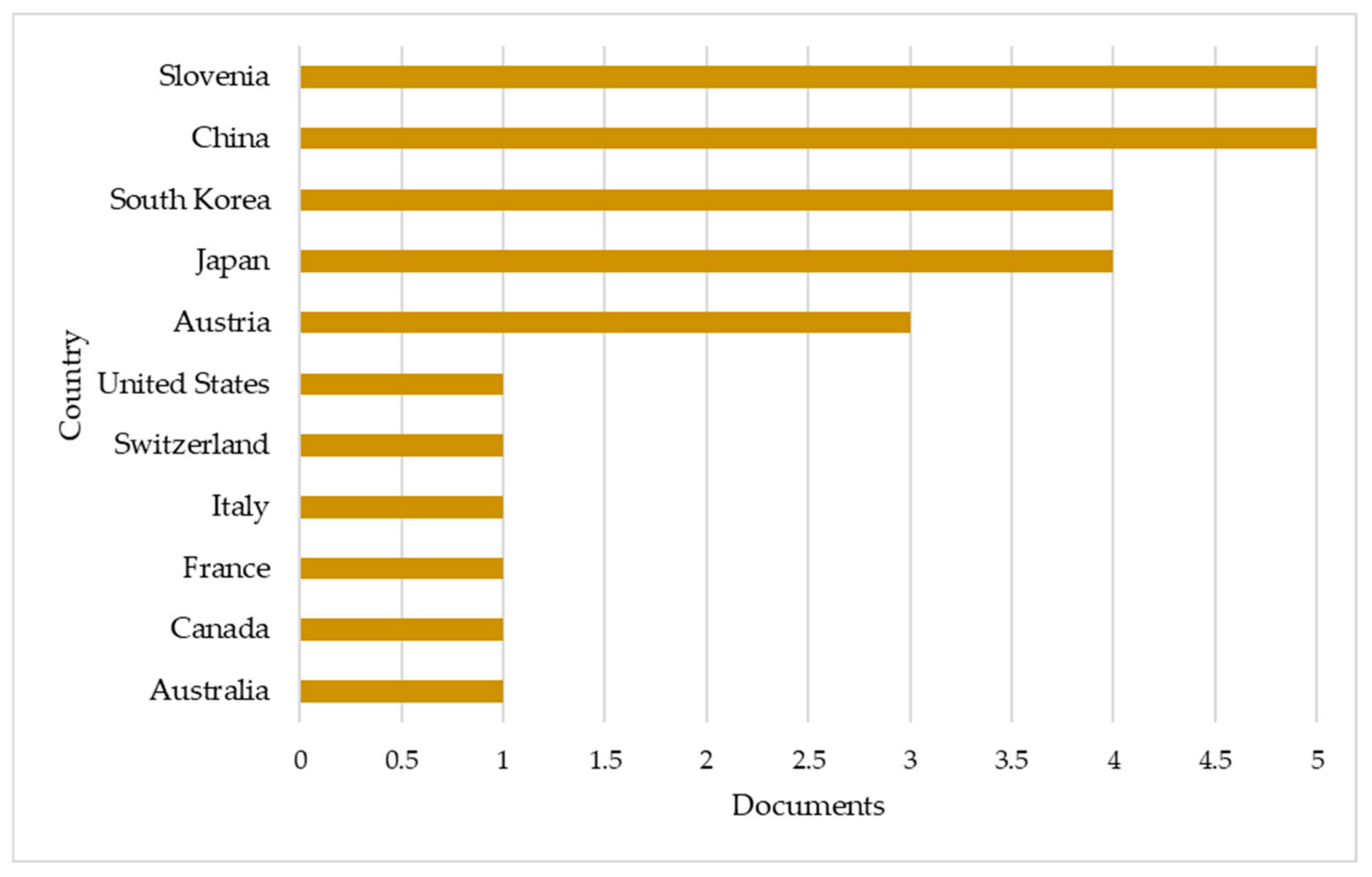
The documents were further categorized based on their country of origin. Figure 3 provides a visual representation of the geographical distribution of the 24 studies included in the systematic review, considering the countries of all authors involved in each study. According to the analysis, Slovenia and China stand out as the leading contributors to research in this area, each accounting for five publications. South Korea and Japan follow closely with four publications each, while Austria contributes three publications. This geographical breakdown highlights the countries most actively engaged in advancing research on robotics in skiing.
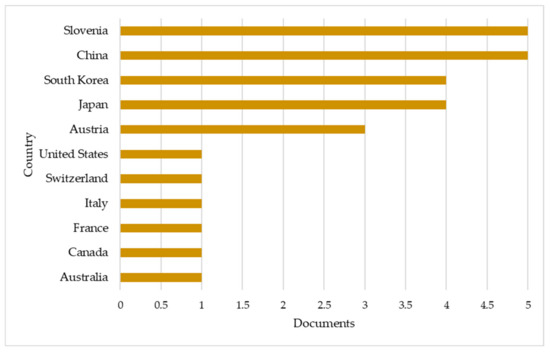
Figure 3.
Geographical distribution of papers based on authors’ countries of origin.
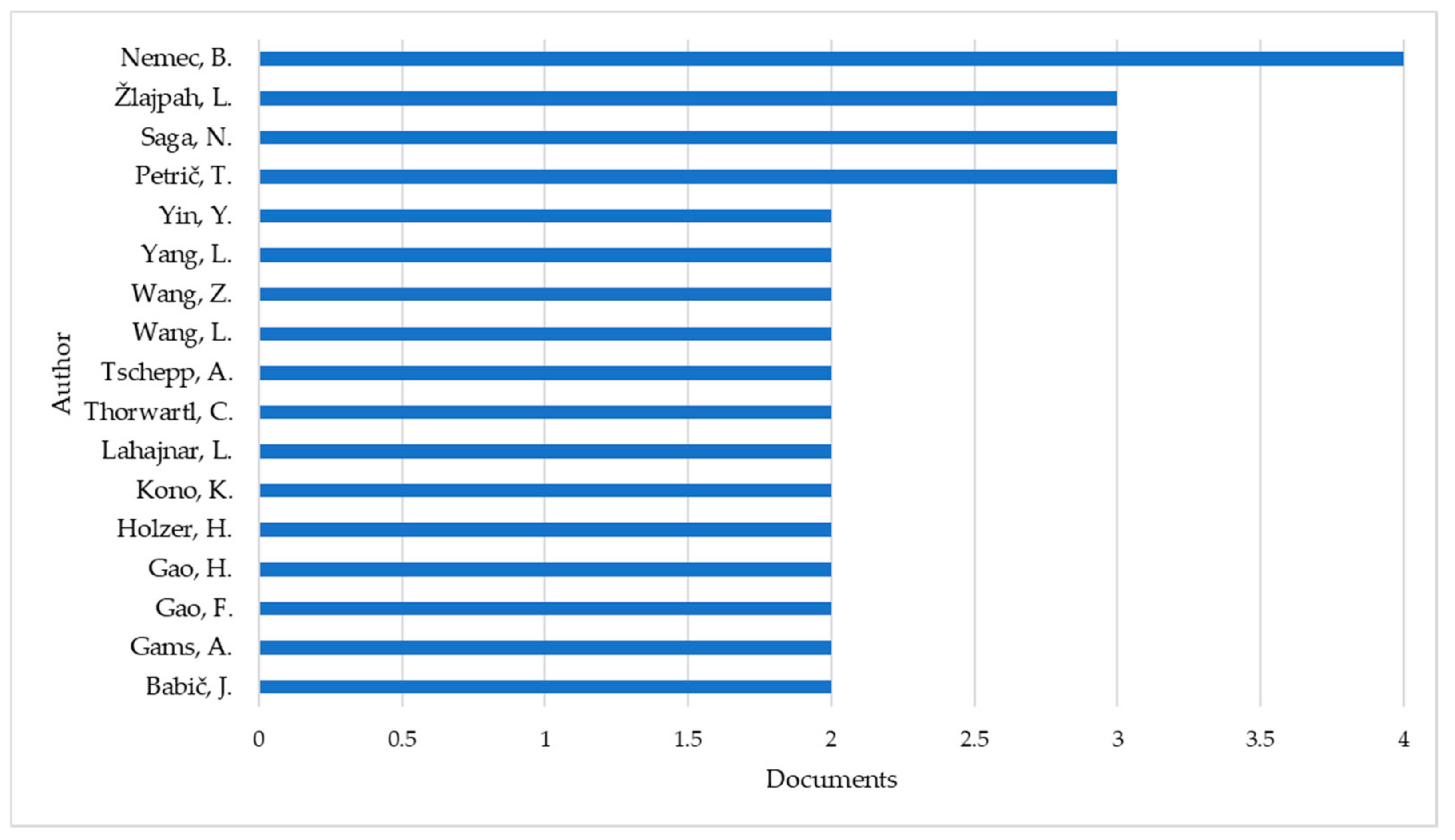
An important aspect of the analysis focused on identifying the most prolific authors, based on the number of publications they contributed to in the field. Figure 4 provides a visual representation of the author’s distribution, highlighting those who have significantly contributed to the research on robotics in skiing. Notably, Bojan Nemec emerged as the author with the highest number of publications, with a total of four studies. Close behind, Tadej Petrič, Norihiko Saga, and Leon Žlajpah each contributed three publications. When considering first authorship specifically, Tadej Petrič stood out as the most frequent first author, with three studies attributed to him. This analysis offers valuable insights into the key contributors driving research in this emerging area.
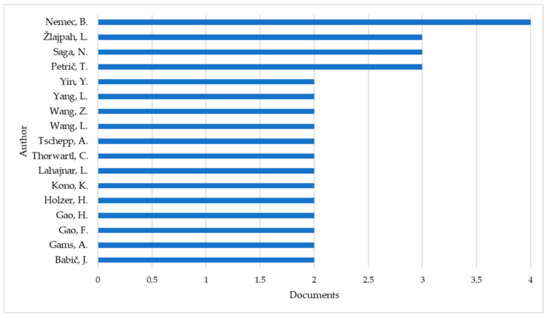
Figure 4.
Distribution of publications by authors with two or more contributions.
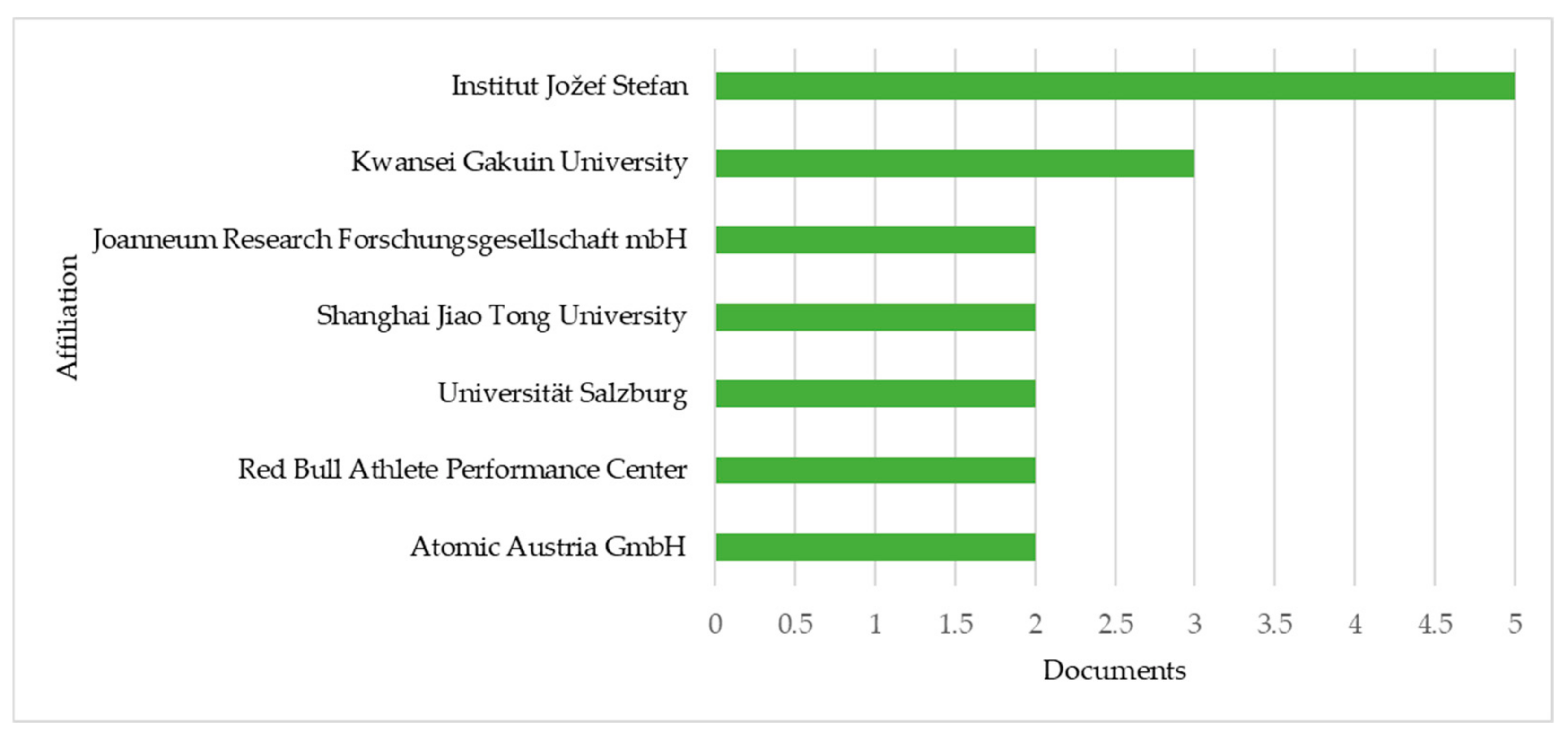
Figure 5 presents the distribution of institutions affiliated with the authors of the reviewed papers. The Jožef Stefan Institute stands out as the leading institution, contributing a total of five publications to the field. Following closely is Kwansei Gakuin University, with three published studies. Several other institutions have made notable contributions as well, with Atomic Austria GmbH, Red Bull Athlete Performance Center, Universität Salzburg, Shanghai Jiao Tong University, and Joanneum Research Forschungsgesellschaft mbH each being affiliated with two publications. This distribution highlights the prominent role of these institutions in advancing research in the area of robotics applied to skiing.
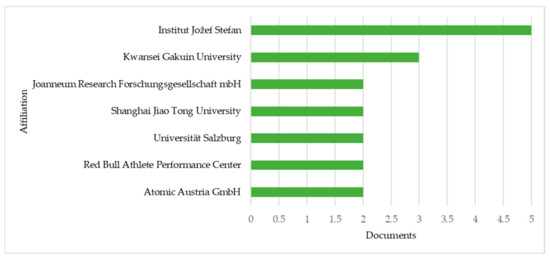
Figure 5.
Institutional affiliations of the published papers.
4.3. Citations, Keywords, and Research Aims
To assess the impact of the research in this field, the number of citations for each article was analyzed. Table 2 presents the top 10 most cited articles in descending order, with citation counts sourced from the Scopus database. The article with the highest number of citations, at 23, is “Design, control, and navigation in unstructured environments”, published in Robotica in 2009. This is followed by “Control and navigation of the skiing robot”, presented at the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, and “A ski robot system for qualitative modelling of the carved turn”, published in Sports Engineering in 2009. These articles represent the most influential contributions to the development of robotic systems in skiing research.
Table 2.
Top 10 most cited works.
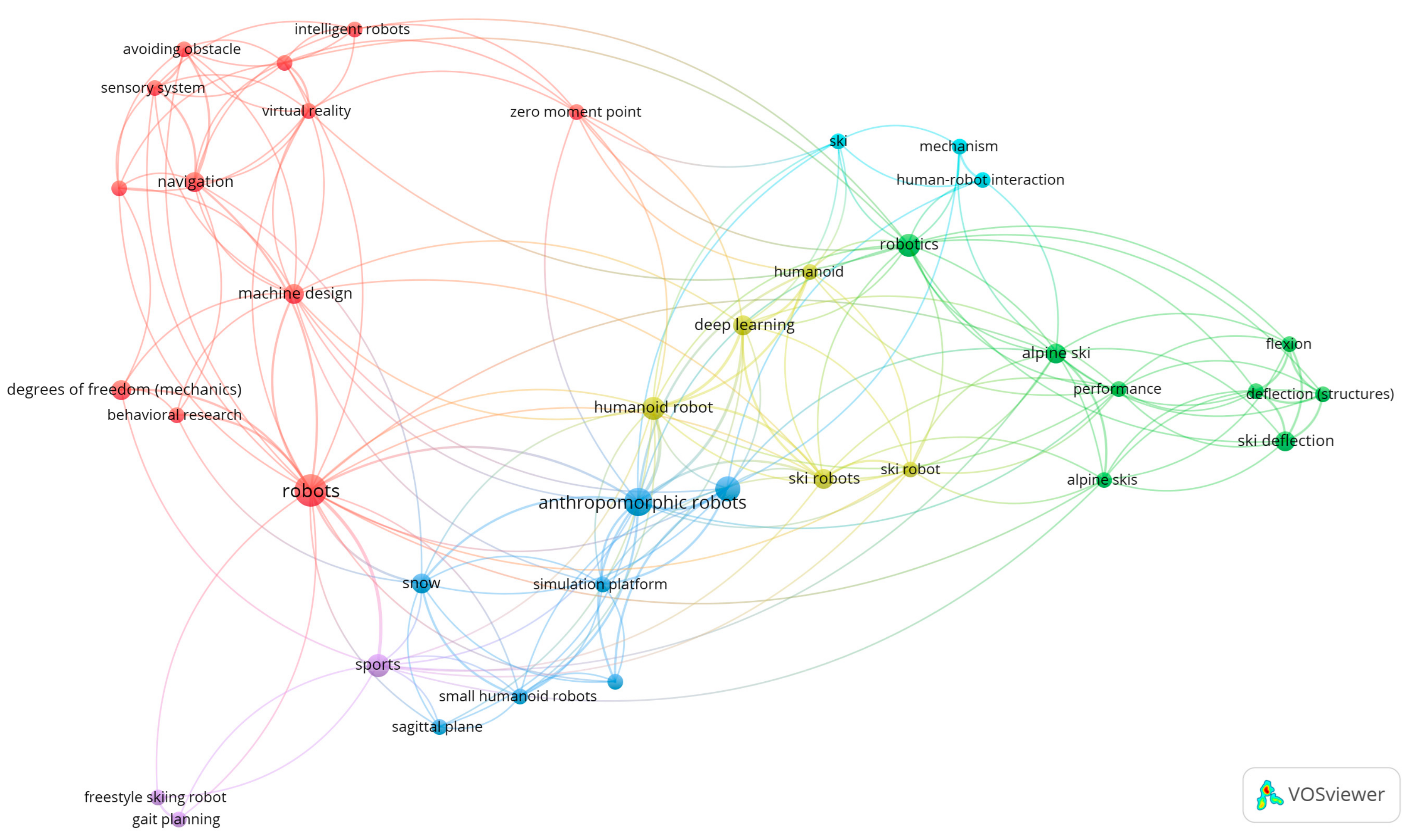
Figure 6 presents a visual representation of keyword co-occurrences, generated using VOSviewer version 1.6.20. A minimum occurrence threshold of two was set, and from a total of 232 keywords, 38 met this criterion. The resulting map is divided into five distinct clusters, with a total of 162 links between the keywords.
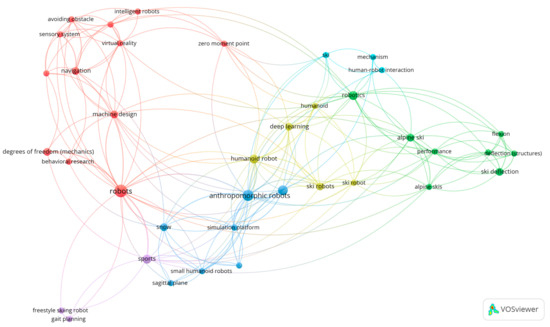
Figure 6.
VOSViewer network map of co-occurring keywords.
Cluster 1 (red): this cluster includes terms such as “robots”, “degrees of freedom”, “sensory systems”, and “machine design”, which highlight the technological and mechanical aspects of robotics.
Cluster 2 (yellow): keywords in this cluster focus on “humanoid robot”, “deep learning”, and “human-robot interaction”, indicating a strong connection between artificial intelligence, robotics, and user interaction.
Cluster 3 (green): this group revolves around “alpine ski”, “ski deflection”, and “performance”, emphasizing the application of robotics in the context of skiing and related performance metrics.
Cluster 4 (blue): keywords like “anthropomorphic robots”, “stability control”, and “skiing robot” reflect research on robots designed to simulate human-like movements and maintain balance during skiing.
Cluster 5 (purple): this cluster includes “sports”, “freestyle skiing robot”, and “gait planning”, linking robotics to the broader sports domain, with a focus on freestyle skiing and the planning of movement patterns.
Notable keyword occurrences include: “robots” (eight occurrences, total link strength 32), “anthropomorphic robots” (six occurrences, total link strength 32), “skiing robot” (five occurrences, total link strength 17), “humanoid robot” (four occurrences, total link strength 24), “robotics” (four occurrences, total link strength 20), and “sports” (four occurrences, total link strength 16).
This analysis underscores the key areas of focus within the field, particularly the intersection of robotics and skiing, as well as the growing emphasis on human–robot interaction and artificial intelligence in robotic design.
Table 3 and Table 4 provide a comprehensive summary of the search results, detailing key aspects of each selected study. It outlines the primary research objective of each paper, alongside a description of the robots employed, including their specific type and configuration. Additionally, the table highlights the degrees of freedom (DOF) associated with each robotic system, offering insight into their range of motion and adaptability. It also categorizes the type of experiment conducted (e.g., simulation, laboratory setup, or real-world trials), providing a clearer understanding of how robots were tested and validated within the context of the research.
Table 3.
Review of selected papers (skiing robots).
Table 4.
Review of selected papers (industrial testing robots).
To better reflect the significant differences in application purposes, the studies have been divided into two categories: (i) skiing robots aimed at dynamic movement on slopes, and (ii) industrial robots aimed at testing ski-related equipment parameters. For both categories, where such information was found, additional technical specifications regarding sensors, control systems, and software environments have been included to provide a more detailed technological overview.
4.4. Key Technical Domains
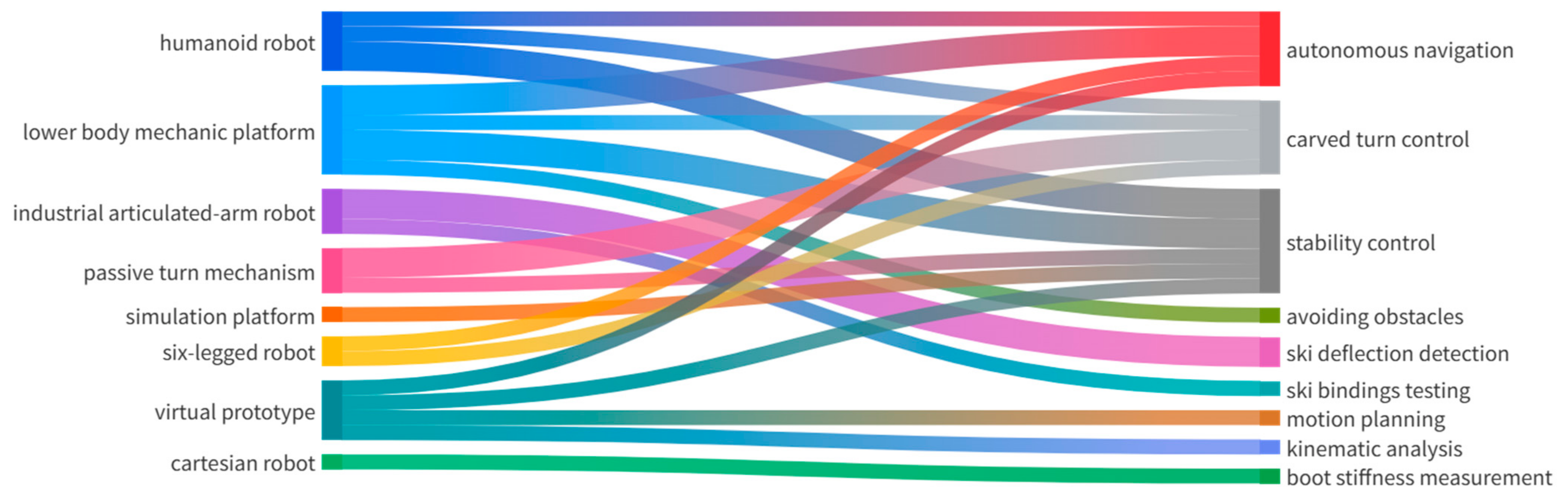
The analysis also considered the primary research topics addressed in the selected studies. Figure 7 provides an overview of these topics, revealing that the most frequently explored subject is carved turn control and stability control followed by obstacle avoidance, autonomous navigation, and detection of ski deflection.

Figure 7.
Sankey diagram illustrating the relationship between robot types and the research topics explored in the studies.
4.4.1. Robotic Morphologies and Hardware Design
Regarding the robotic platforms utilized, the majority of studies (79%) focused on skiing robots, with lower-body platforms and humanoid robots being the most represented category, appearing in ten studies. The classification of robot types includes the following: lower body mechanical platforms (six studies), humanoid robots (four studies), virtual prototypes (four studies), passive turn mechanisms (three studies), industrial articulated-arm robots (three studies), six-legged robots (two studies), simulation platforms (one study), and cartesian robots (one study). It is important to note that a single study may cover multiple topics.
Overall, the reviewed studies highlight the diversity of robotic systems employed in skiing research, ranging from humanoid robots and simulation platforms to specialized robotic mechanisms such as six-legged skiing robots and industrial robots used for evaluating ski equipment performance.
4.4.2. Environmental Perception
Various techniques have been employed for object recognition in skiing environments, particularly for detecting flags, gates, or other obstacles on the slope. These methods range from traditional image processing techniques [3,49] to more advanced artificial intelligence-driven approaches. Deep learning algorithms have been leveraged to enhance recognition accuracy [4], while ranging sensors such as LiDAR have been utilized for precise distance measurement and obstacle detection [5,24,59]. Additionally, visual perception systems integrated with neural networks have been implemented to improve real-time recognition and response capabilities [52]. A more sophisticated approach combines convolutional neural networks (CNNs) with LiDAR sensors, providing a robust multi-modal perception framework for enhanced environmental awareness and object identification on the ski slope [20].
4.4.3. Balance Control and Stability Mechanisms
Research has also demonstrated that humanoid robots can effectively replicate carved turns through coordinated leg movements, including extension–flexion and abduction–adduction [4,7].
In the sagittal plane, extension–flexion has a significant impact on skiing dynamics. When a skier crouches, flexing the knees and hips, they absorb shocks and lower their center of mass for stability. Conversely, extending the legs propels the skier into the next turn, generating power and control. For humanoid robots, servo motors at the hips and knees must precisely alternate between flexion and extension to mimic this natural balance and energy transfer.
Similarly, abduction–adduction governs lateral movements in the frontal plane. Abduction, or moving the legs outward, helps tilt the skis and initiate a turn, while adduction, bringing the legs back together, stabilizes the skier through the curve. In robotic skiing, actuators at the hips adjust these movements to control ski edge angles, while ankle adjustments fine-tune edge contact for precision steering.
To execute smooth and stable carved turns, both humans and robots rely on a synergy of movements, where extension–flexion manages the vertical motion and abduction–adduction ensures lateral weight shifts. By integrating these mechanisms, humanoid ski robots can navigate slopes with increasing efficiency, closely imitating the biomechanics of human skiing.
These biomechanical actions allow robots to adjust their posture dynamically. Stability during skiing is a critical factor, with previous studies emphasizing the importance of maintaining the ZMP within the support polygon of the robot [5,20,22]. This principle holds regardless of whether the humanoid has an active torso joint [3] or not [4].
4.4.4. Ski Designs and Shapes
In the majority of the studies, researchers opted for carving skis rather than traditional straight skis, primarily due to their enhanced ability to initiate and maintain turns without the need for skidding [3,4,5,6,20,21,22,23,49,51,52,54,55,56,57,59]. In contrast, a smaller number of studies utilized downhill skis [6,48], typically designed for high-speed stability on steep slopes, or freestyle skis [58,60], which are more flexible and symmetrical to support tricks and jumps in terrain parks. These choices reflect the specific performance demands and movement patterns being investigated in each discipline: slalom, which demands quick, sharp turns, downhill racing, where speed and stability are important, and freestyle skiing, which emphasizes agility and maneuverability.
Traditional skis, widely used before the 1990s, had a straight, narrow profile requiring significant edge control and skidding to turn. In contrast, carving skis feature a deep sidecut, creating an hourglass shape that allows skiers to tip the ski on edge and carve clean arcs with minimal effort. This innovation began with the Elan SCX in 1994, which marked the shift toward modern performance-oriented skis [61].
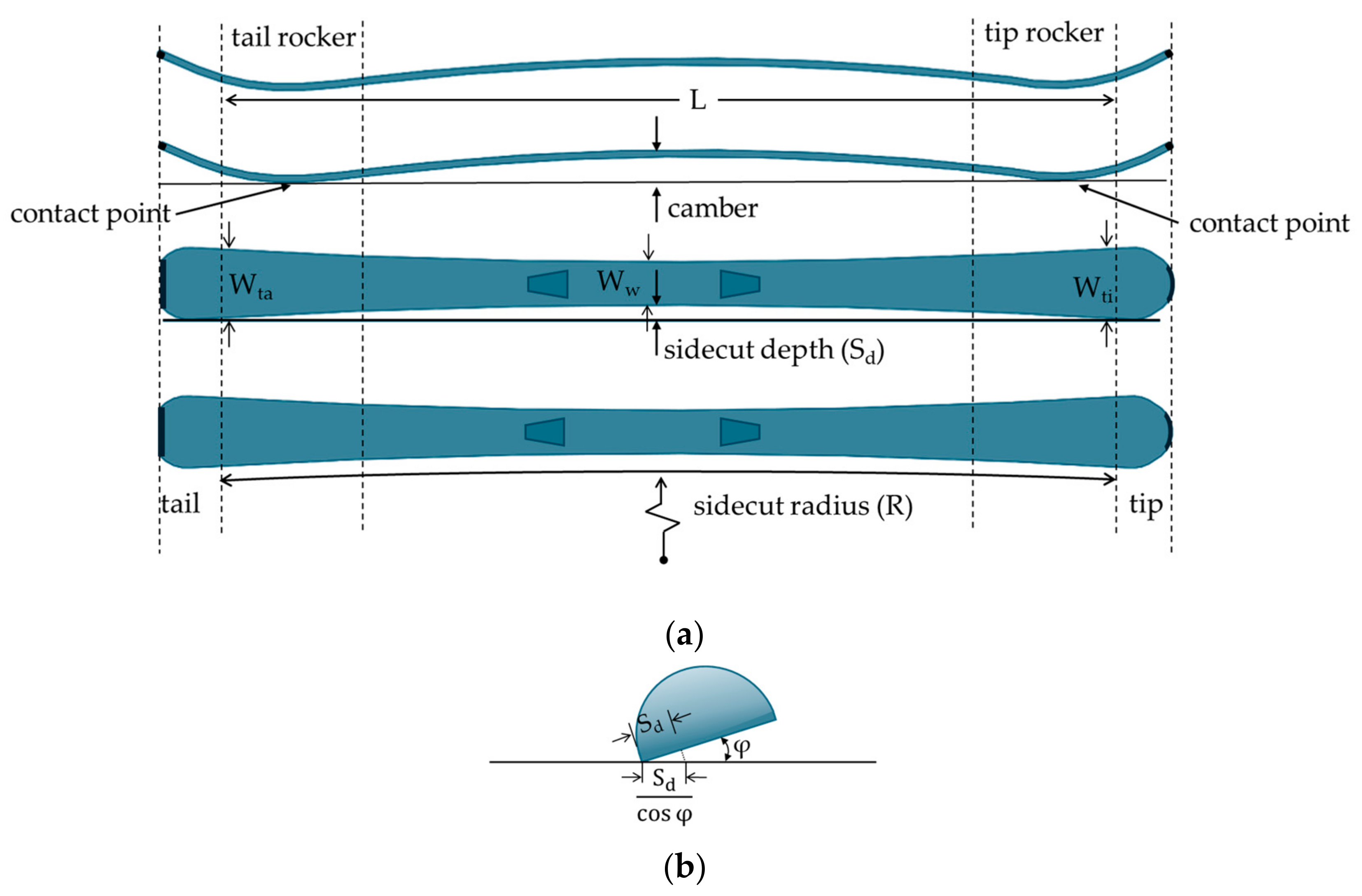
The curvature of a ski (sidecut radius), defined by its tip, waist, and tail width, determines how tight or wide turns will be. A smaller sidecut radius (10–15 m) makes skis more agile, ideal for slalom racing, while a larger radius (30–50 m) provides stability, suited for high-speed downhill runs. Beyond side cuts, the ski’s camber and rocker profiles also significantly influence performance. The camber refers to the gentle upward arch in the middle of the ski, ensuring even weight distribution and better edge grip on hard snow. In contrast, a rocker, a reverse camber where the tip and tail rise, improves floatation in deep snow and makes turn initiation smoother. Figure 8 provides a visual representation of a ski’s sidecut, along with its camber and rocker profiles.
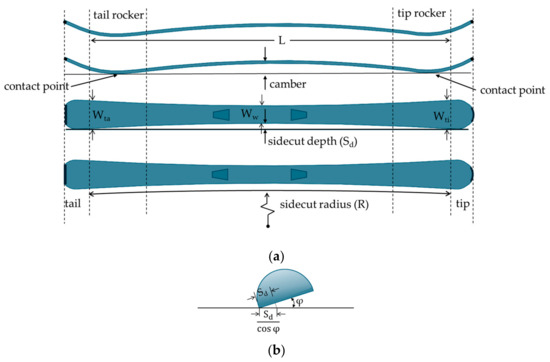
Figure 8.
Illustration of ski geometry, showing sidecut, camber, and rocker: (a) top and side views; (b) front view of the ski flexed during a turn.
The ideal blend of camber and rocker varies by ski type. Slalom carving skis typically feature more camber and a sharper sidecut, maximizing precision and responsiveness on groomed runs. All-mountain skis, on the other hand, balance camber and rocker to offer versatility across different snow conditions, allowing for both stability and maneuverability.
The sidecut radius R (in meters) characterizes the curvature of a ski’s edge and can be approximated by
where L is the ski length and Wti, Ww, and Wta are the tip, waist, and tail widths, respectively. Assuming a circular arc, this can be expressed more compactly by defining the sidecut depth Sd as [62]:
This formulation highlights the inverse relationship between the sidecut radius and the sidecut depth: A deeper sidecut (larger Sd) results in a smaller turning radius, which enhances the ski’s ability to make tighter turns.
This shows that a deeper sidecut (larger Sd) leads to a smaller turning radius. In actual skiing, the effective turn radius (Rt) is further reduced by the ski’s edge angle φ, according to
4.4.5. Simulation, Experimentation, and Validation Techniques
In terms of software used in the studies, ski robots are tested in both simulated and real-world environments, each offering distinct advantages. Simulations provide controlled conditions, making it easier to test algorithms without the unpredictable variables of real snow. Various software tools, including Webots [5], MATLAB [20,48,49,56,57], Blender [49], Unity [48], and ADAMS [58,60], are used to model dynamics, stability, and autonomous control. Some researchers even develop custom simulators to better replicate skiing physics. For example, Webots enable testing carving turns and navigation [5], while MATLAB’s SimMechanics toolbox helps model skiing robot dynamics [49]. Blender assists with visualizing ski environments [49], and Unity is used for virtual reality applications in adaptive skiing [48].
Real-world testing, on the other hand, is essential for validating simulation results. Many experiments are conducted on actual ski slopes, though snow conditions can be unpredictable. To ensure consistency, some studies use artificial slopes, such as polyester-covered surfaces or paved tracks with roller skis [23]. Other setups, like Stewart platforms, simulate ground inclination changes, creating hybrid environments that blend physical hardware with virtual simulations [21,51]. Industrial robots are also used in laboratories to analyze ski deflection and binding release mechanisms under controlled conditions [50,57].
4.5. Limitations and Challenges of Skiing Experiments
Studies on skiing robots encounter several challenges that limit their accuracy and real-world applicability. One of the main difficulties is simulating real snow. Many researchers struggle to replicate the complex properties of snow [5], and even advanced simulators like Webots fail to provide a truly realistic environment. This makes it hard to verify algorithms under actual skiing conditions. Artificial test surfaces, like artificial grass, are often used in experiments, but they do not accurately mimic the friction properties of real snow [7]. This difference leads to discrepancies in how the robot behaves compared to real-world conditions.
Another limitation is the lack of simulation tools that can accurately model skiing robots, skis, and terrain in real time [5]. This gap has led some researchers to develop their own systems for testing. Additionally, some skiing robot simulations do not offer an easy way to control the robot’s speed while in a sliding state, making it difficult to replicate actual skiing dynamics.
In experiments with physical skiing robots, there is also a narrow range of parameters that can result in successful turns [7]. These parameters, such as joint angles, are influenced by various factors, including speed, slope angle, and the robot’s physical characteristics. This makes it challenging to find a consistent method for achieving reliable results.
The mechanical models used to simulate ski turns are another hurdle. These models often involve simplifications and approximations, which may not fully represent the actual movements made by skiers [23]. This can make the models difficult to use for skiers trying to improve their technique.
Skiing robots also face challenges related to sensor development [20]. The sensors required to accurately replicate skiing are still under development, making skiing a particularly difficult task for robots. Stability control is another issue. Some skiing robots cannot properly maintain stability, especially when handling uneven surfaces or maintaining the ZMP in all necessary axes [20].
Safety binding tests using robots also face simplifications in motion patterns that fail to capture the full complexity of real falls. In some experiments, there is a lack of standardized procedures, such as for defining pivot points in binding tests, which can affect the interpretability and comparability of results [50]. Even with accurate robots and calibrated sensors, laboratory setups can still introduce systematic errors, which are difficult to eliminate without complex in situ calibration.
In terms of deflection measurement, validating ski deflection sensors in dynamic conditions remains a challenge [57]. Previous methods, such as strain gauges, often lacked rigorous validation, and new optical systems for detecting curvature face limitations in marker distance and single sensor validation. Similarly, while prototypes for detecting torsional deflection show promise, their accuracy needs to be verified against a “gold standard” measurement, as laboratory simulations often fail to replicate real-world support conditions [56].
Lastly, friction is a critical factor in skiing, but many studies on passive skiing robots fail to consider it properly [54]. Without incorporating friction models, it is difficult to compare robot simulations with real-world skiing conditions. These challenges highlight the need for further research and development to bridge the gap between theoretical simulations and actual skiing performance.
A comparative analysis of experimental approaches highlights marked differences in robot performance between simulations and real-world scenarios. Robots in virtual environments often perform smoothly due to simplified physics, while real-world counterparts face instability and delayed responses caused by sensor noise, latency, and unpredictable terrain conditions. To address these discrepancies, future efforts should explore hybrid testing setups that integrate real hardware with simulated environments, such as motion platforms or augmented reality systems, to mimic varied terrain while incorporating real-time sensor feedback for adaptive control.
From a control systems standpoint, strategies like adaptive impedance control [63] and reinforcement learning-based feedback [64] show strong potential for handling dynamic interactions. These approaches have demonstrated effectiveness in enhancing control precision and mechanical resilience in related applications [65]. By combining such advanced control techniques with scalable test platforms, this review outlines a more effective and realistic direction for future skiing robotics research and development.
To accelerate progress in skiing robotics, key technical challenges must be prioritized. These include developing accurate, real-time models of snow-surface interaction and friction using sensor fusion and machine learning, enhancing environmental perception through robust, multi-modal sensor systems, and advancing adaptive control algorithms that adjust to dynamic terrain conditions. Equally important are the creation of realistic, open-access simulation platforms to support development and collaboration and the establishment of standardized testing protocols to ensure consistent evaluation. Addressing these challenges will not only advance skiing robotics but also benefit related fields like humanoid robotics and autonomous mobility.
4.6. Practical Applications of Robotics Related to Skiing and Future Development Paths
Beyond their role as technological demonstrators, skiing robots can provide a wide range of practical applications:
- Standardized ski equipment testing: robotic systems capable of replicating controlled skiing maneuvers and providing reproducible test conditions for evaluation of ski designs, boot stiffness, and binding safety mechanisms;
- Athlete training and performance analysis: skiing robots equipped with biomechanical modeling that can act as performance references for human skiers, providing real-time feedback on optimal movement patterns and supporting technique refinement;
- Rehabilitation and assistive technologies: Robotic skiing platforms can be adapted for rehabilitation purposes, helping athletes recovering from injuries or supporting training programs;
- Research in unstructured terrain locomotion: The challenges faced by skiing robots can provide valuable insights for other fields such as autonomous exploration robotics, disaster response systems, and planetary rover development.
To accelerate progress toward these applications, future research should prioritize:
- The integration of sensor fusion techniques (combining LiDAR, IMU, GNSS, and vision systems) to enhance perception and environmental modeling;
- The adoption of reinforcement learning and adaptive control frameworks for dynamic decision-making on variable terrains;
- Biomechanical optimization of joint actuation patterns, mimicking human skiing postures for better energy efficiency and stability;
- Customization of skiing robots and exoskeletons for rehabilitation exercises on dry slopes or indoor simulators;
- Combining robotics with virtual reality environments to create immersive and motivational therapy programs;
- Modular hardware design to enable rapid adaptation of robots to different skiing styles (e.g., alpine, freestyle, and slalom).
These targeted development paths will help transition skiing robotics from experimental prototypes to valuable platforms for sports science, equipment testing, and autonomous system development.
4.7. Limitations of the Study
Despite the systematic and comprehensive approach used in this review, the analysis revealed only limited new information that could significantly push the boundaries of current research on robotic applications in skiing. This result stems from several contributing factors.
First, the available body of literature remains limited in both volume and scope. With only 24 eligible studies identified, the field is still emerging, and much of the existing work converges around similar challenges, such as carving turn control, stability maintenance, and obstacle avoidance. Consequently, many studies reiterate known technical challenges, particularly difficulties in simulating realistic snow conditions, controlling stability via ZMP techniques, and replicating human biomechanics in dynamic skiing environments.
Second, the methodological diversity among the studies, while valuable for scope, made it difficult to synthesize findings into new generalizable theories or frameworks. Differences in experimental design, robot types, and evaluation metrics created a fragmented landscape rather than a cohesive, cumulative body of knowledge.
Third, the persistence of common limitations across multiple studies, including the overreliance on laboratory settings, inadequate modeling of ski–snow interaction, and the absence of standardized performance evaluation protocols, limited the capacity of the review to identify disruptive technological advancements or transformative approaches.
Moreover, while the integration of machine learning techniques is gaining traction, current applications remain in preliminary stages, often restricted to simulations without comprehensive real-world validation. This restricts their ability to generate actionable insights for immediate practical deployment.
In summary, the analysis reflects a field that is still in its exploratory phase, marked more by incremental progress and repeated challenges than by breakthrough innovations. While the review serves to map the existing terrain, identify recurring obstacles, and highlight promising directions, it ultimately confirms that robotic skiing research remains nascent and fragmented. Significant conceptual and technological leaps will be necessary before more profound and impactful insights can be realized.
Given the emerging nature of skiing robotics, the number of available studies remains limited. While the systematic methodology applied here is designed for larger datasets, this review serves as a necessary first step, mapping the current landscape and establishing a framework for future, more extensive analyses as the field expands.
5. Conclusions
This systematic review examined the current state of research on robotic applications in skiing, analyzing 24 eligible studies from diverse geographical locations and research institutions. The findings reveal several important trends and identify substantial opportunities for future development in this emerging field.
The research landscape is characterized by concentrated contributions from a few key countries (Slovenia, China, South Korea, and Japan) and institutions (notably the Jožef Stefan Institute and Kwansei Gakuin University), suggesting potential benefits from broader international collaboration and knowledge exchange. The temporal distribution of publications indicates steady but modest growth in research interest since 2009, with carving turn control, stability control, and obstacle avoidance emerging as dominant research aims.
A notable observation from this review is the strong preference for carving skis in robotic skiing applications, utilizing their geometric design to enable smooth turn execution without skidding. The predominant use of humanoid robots and lower-body mechanical platforms reflects attempts to replicate human biomechanics, particularly the extension–flexion and abduction–adduction movements essential for executing carved turns. Maintaining the ZMP within the support polygon has emerged as a critical stability control strategy across multiple studies.
This review identified significant challenges that currently limit the advancement of skiing robotics. The difficulty in accurately simulating snow properties and ski–snow interactions represents perhaps the most fundamental obstacle, leading to discrepancies between simulated performance and real-world behavior. The narrow parameter ranges for successful turns, limitations in sensor technology, and difficulties in stability control on variable terrain further complicate development efforts. Additionally, the lack of standardized testing methodologies hampers comparative analysis and benchmarking across different robotic systems.
Looking forward, several promising research directions emerge. The integration of advanced machine learning techniques, particularly deep learning for environmental perception and adaptive control, offers potential solutions for real-time terrain adaptation. Developing more sophisticated physical models of ski–snow interaction could bridge the gap between simulation and real-world performance. Furthermore, greater emphasis on interdisciplinary collaboration between robotics engineers, biomechanics experts, and skiing professionals could yield more practical and effective robotic systems.
The applications of skiing robotics extend beyond sports performance to include equipment testing, rehabilitation technology, and training aids. Robotic systems capable of precisely replicating human skiing movements offer unique opportunities for standardized equipment testing and biomechanical analysis that would be difficult to achieve with human subjects alone.
In conclusion, while robotics in skiing remains a specialized field with significant technical challenges, its continued development holds promise for advancing both the sport itself and broader applications in human–robot interaction, rehabilitation robotics, and sports science. Addressing the identified limitations through interdisciplinary collaboration, improved simulation technologies, and rigorous field testing will be essential for realizing the full potential of robotic applications in skiing.
Funding
This research received no external funding.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
During the preparation of this manuscript/study, the author used Claude 3.7 Sonnet for the purposes of text editing. The author has reviewed and edited the output and takes full responsibility for the content of this publication.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Wang, K.; Jing, Z.; Gang, L.; Yang, H.; Hu, F. Industrial automation and product quality: The role of robotic production transformation. Appl. Econ. 2024, 1–16. [Google Scholar] [CrossRef]
- Liu, S.; Liu, Z.; Daniel, A.; Thilak, D. AI with Robotics for leg support to skiers and snowboarders. J. Intell. Fuzzy Syst. 2021, 1–13. [Google Scholar] [CrossRef]
- Nemec, B.; Lahajnar, L. Control and navigation of the skiing robot. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, St. Louis, MO, USA, 11–15 October 2009; pp. 2321–2326. [Google Scholar]
- Han, Y.H.; Jeon, H.J.; Cho, B.K. Development of a Humanoid Robot for the 2018 Ski Robot Challenge. Int. J. Precis. Eng. Manuf. 2020, 21, 1309–1320. [Google Scholar] [CrossRef]
- Kim, S.H.; Lee, B.; Hong, Y.D. Stability control and turning algorithm of an alpine skiing robot. Sensors 2019, 19, 3664. [Google Scholar] [CrossRef]
- Iverach-Brereton, C.; Postnikoff, B.; Baltes, J.; Hosseinmemar, A. Active balancing and turning for alpine skiing robots. Knowl. Eng. Rev. 2016, 32, e6. [Google Scholar] [CrossRef]
- Yoneyama, T.; Kagawa, H.; Unemoto, M.; Iizuka, T.; Scott, N.W. A ski robot system for qualitative modelling of the carved turn. Sports Eng. 2009, 11, 131–141. [Google Scholar] [CrossRef]
- Erdmann, W.S. Problems of Sport Biomechanics and Robotics. Int. J. Adv. Robot. Syst. 2013, 10, 123. [Google Scholar] [CrossRef]
- Zheng, Y.F.; Wang, H.; Li, S.; Liu, Y.; Orin, D.; Sohn, K.; Jun, Y.; Oh, P. Humanoid robots walking on grass, sands and rocks. In Proceedings of the IEEE Conference on Technologies for Practical Robot Applications, TePRA, Woburn, MA, USA, 22–23 April 2013. [Google Scholar]
- Yin, K.; Gao, Y.; Gao, F.; Chen, X.; Zhao, Y.; Xiao, Y.; Sun, Q.; Sun, J. Mechanism Design and Motion Planning of a Hexapod Curling Robot Exhibited During the Beijing 2022 Winter Olympics Games. Engineering 2024, 35, 15–31. [Google Scholar] [CrossRef]
- Lin, H.-I.; Yu, Z.; Huang, Y.-C. Ball Tracking and Trajectory Prediction for Table-Tennis Robots. Sensors 2020, 20, 333. [Google Scholar] [CrossRef]
- Riener, R.; Rabezzana, L.; Zimmermann, Y. Do robots outperform humans in human-centered domains? Front. Robot. AI 2023, 10, 1223946. [Google Scholar] [CrossRef]
- Boboc, R. Enhancing Efficiency and Performance: Robotic Applications in Skiing. In Proceedings of the 5th IFSA Winter Conference on Automation, Robotics & Communications for Industry 4.0/5.0 (ARCI’ 2025), Granada, Spain, 19–21 February 2025; pp. 7–12. [Google Scholar]
- Siegel, J.; Morris, D. Robotics, Automation, and the Future of Sports. In 21st Century Sports: How Technologies Will Change Sports in the Digital Age; Schmidt, S.L., Ed.; Springer International Publishing: Cham, Switzerland, 2024; pp. 67–85. [Google Scholar]
- Hu, L.; Liu, C.; Jiang, W.; He, D.; Qu, Q.; Wang, Z.; Ying, C. Application of gaming robot based on gait recognition algorithm in sports training and assistance system. Entertain. Comput. 2025, 52, 100763. [Google Scholar] [CrossRef]
- Iverach-Brereton, C.; Baltes, J.; Anderson, J.; Winton, A.; Carrier, D. Gait design for an ice skating humanoid robot. Robot. Auton. Syst. 2014, 62, 306–318. [Google Scholar] [CrossRef]
- Javier Lopez Frias, F.; Luis Pérez Triviño, J. Will robots ever play sports? Sport Ethics Philos. 2016, 10, 67–82. [Google Scholar] [CrossRef]
- Trenchard, H. When Robots Get Bored and Invent Team Sports: A More Suitable Test than the Turing Test? Information 2018, 9, 118. [Google Scholar] [CrossRef]
- Liu, J. Application of entertainment and fitness robots based on game interaction in sports training data analysis. Entertain. Comput. 2025, 52, 100837. [Google Scholar] [CrossRef]
- Park, C.; Kim, B.; Kim, Y.; Eum, S.; Song, H.; Yoon, D.; Moon, J.; Han, J. Carved Turn Control with Gate Vision Recognition of a Humanoid Robot for Giant Slalom Skiing on Ski Slopes. Sensors 2022, 22, 816. [Google Scholar] [CrossRef]
- Petrič, T.; Gams, A.; Babič, J.; Žlajpah, L. Reflexive stability control framework for humanoid robots. Auton. Robot. 2013, 34, 347–361. [Google Scholar] [CrossRef]
- Wu, Z.; Ye, J.; Wang, X.; Li, F. Control of Ski Robot Based on Deep Reinforcement Learning. In Proceedings of the Conference Digest—2021 International Conference on Security, Pattern Analysis, and Cybernetics, SPAC 2021, Chengdu, China, 18–20 June 2021; pp. 211–215. [Google Scholar]
- Kono, K.; Saga, N. Development of a passive turn type skiing robot with variable height mechanism of gravitational center. J. Robot. Mechatron. 2012, 24, 372–378. [Google Scholar] [CrossRef]
- Yang, L.; Yin, Y.; Wang, Z.; Wang, L.; Gao, F.; Chen, X.; Gao, H. Design and Control of a Novel Six-Legged Robot for Flat, Downhill, and Uphill Skiing. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Singapore, 2023; pp. 469–480. [Google Scholar]
- García, J.M.; Duarte, F.G. Mobile rolling robots designed to overcome obstacles: A review. Forces Mech. 2024, 16, 100283. [Google Scholar] [CrossRef]
- Ju, F.; Wang, Y.; Xie, B.; Mi, Y.; Zhao, M.; Cao, J. The Use of Sports Rehabilitation Robotics to Assist in the Recovery of Physical Abilities in Elderly Patients with Degenerative Diseases: A Literature Review. Healthcare 2023, 11, 326. [Google Scholar] [CrossRef]
- Wu, Z.; Zheng, K.; Ding, Z.; Gao, H. A survey on legged robots: Advances, technologies and applications. Eng. Appl. Artif. Intell. 2024, 138, 109418. [Google Scholar] [CrossRef]
- Yu, Z.; Duan, A.; Zhu, Z.; Zhang, W. Biomimetic soft-legged robotic locomotion, interactions and transitions in terrestrial, aquatic and multiple environments. Sustain. Mater. Technol. 2024, 40, e00930. [Google Scholar] [CrossRef]
- Bakırcıoğlu, V.; Çabuk, N.; Jond, H.B.; Kalyoncu, M. Optimization-driven design and experimental validation of a hydraulic robot leg mechanism. Measurement 2025, 250, 117096. [Google Scholar] [CrossRef]
- Chambers, V.; Hobbs, B.; Gaither, W.; Thé, Z.; Zhou, A.; Karakasis, C.; Artemiadis, P. The Variable Stiffness Treadmill 2: Development and Validation of a Unique Tool to Investigate Locomotion on Compliant Terrains. J. Mech. Robot. 2025, 17, 031005. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, J.; Jung, S.; Kim, H.-Y.; Lo Preti, M.; Laschi, C.; Ren, Z.; Sitti, M.; Full, R.J.; Yang, G.-Z. Bioinspired and biohybrid soft robots: Principles and emerging technologies. Matter 2025, 8, 102045. [Google Scholar] [CrossRef]
- Cui, J.; Wang, P.; Sun, T.; Ma, S.; Liu, S.; Kang, R.; Guo, F. Design and experiments of a novel quadruped robot with tensegrity legs. Mech. Mach. Theory 2022, 171, 104781. [Google Scholar] [CrossRef]
- Marcus, S.D.; Shapiro, A.; Giladi, C. Enhancing Quadruped Robot Walking on Unstructured Terrains: A Combination of Stable Blind Gait and Deep Reinforcement Learning. Electronics 2025, 14, 1431. [Google Scholar] [CrossRef]
- Wang, L.; Yin, Y.; Yang, L.; Gao, F.; Chen, X. Development and Implementation of a Six-Legged Skiing Robot for Cross-Country Skiing Techniques. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Singapore, 2025; pp. 185–198. [Google Scholar]
- Afzal, N.; Rehman, M.u.; Seneviratne, L.; Hussain, I. The Convergence of AI and animal-inspired robots for ecological conservation. Ecol. Inform. 2025, 85, 102950. [Google Scholar] [CrossRef]
- Nguyen, V.C.; Kim, S.H. A novel fixed-time prescribed performance sliding mode control for uncertain wheeled mobile robots. Sci. Rep. 2025, 15, 5340. [Google Scholar] [CrossRef]
- Xue, Y.; Wang, L.; He, B.; Zhao, Y.; Wang, Y.; Li, L. Research on Environmental Adaptability of Force–Position Hybrid Control for Quadruped Robots Based on Model Predictive Control. Electronics 2025, 14, 1604. [Google Scholar] [CrossRef]
- Khan, R.A.I.; Zhang, C.; Deng, Z.; Zhang, A.; Pan, Y.; Zhao, X.; Shang, H.; Li, R. Multi-Agent Reinforcement Learning Tracking Control of a Bionic Wheel-Legged Quadruped. Machines 2024, 12, 902. [Google Scholar] [CrossRef]
- Jamali, A.; Labadin, A.A.; Jamaludin, M.S. Investigation of Hybrid Mechanism for Knee Exoskeleton Rehabilitation Device. In Proceedings of the IEEE International Conference on Smart Instrumentation, Measurement and Applications, ICSIMA, Bandung, Indonesia, 30–31 July 2024; pp. 109–113. [Google Scholar]
- Ma, C.; Jiang, K.; Zhao, Q.; Ni, D.; Zhang, J. Innovative Applications of Multimodal Sensing Technology in Sports Rehabilitation Assessment and Training. Scalable Comput. 2025, 26, 855–863. [Google Scholar] [CrossRef]
- Marchesi, G.; Ricaldone, E.; De Luca, A.; Torre, K.; Quinland, E.; Bellitto, A.; Squeri, V.; Massone, A.; Casadio, M.; Canessa, A. A robot-based assessment of trunk control in Spinal Cord Injured athletes. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, New York, NY, USA, 29 November–1 December 2020; pp. 497–502. [Google Scholar]
- Li, X.-A.; Zhang, D.; Jia, X.; Han, X.; Ning, G.; Li, Q. A Bayesian learning approach for dynamic parameter identification and its applications in industrial robotic systems. Comput. Methods Appl. Mech. Eng. 2025, 441, 117951. [Google Scholar] [CrossRef]
- Zhang, D.; Liang, H.; Li, X.-A.; Jia, X.; Wang, F. Kinematic calibration of industrial robot using Bayesian modeling framework. Reliab. Eng. Syst. Saf. 2025, 253, 110543. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef]
- Singh, J. Critical appraisal skills programme. J. Pharmacol. Pharmacother. 2013, 4, 76–77. [Google Scholar] [CrossRef]
- Sterne, J.A.C.; Savović, J.; Page, M.J.; Elbers, R.G.; Blencowe, N.S.; Boutron, I.; Cates, C.J.; Cheng, H.-Y.; Corbett, M.S.; Eldridge, S.M.; et al. RoB 2: A revised tool for assessing risk of bias in randomised trials. BMJ 2019, 366, l4898. [Google Scholar] [CrossRef]
- Hasan, M.K. P2P Motion: A Motion Planning Algorithm for Cyclic Synchronous Position Based Motion Control Systems. In Proceedings of the International Conference on Electronics, Communications and Information Technology, ICECIT 2021, Khulna, Bangladesh, 14–16 September 2021. [Google Scholar]
- Houda, T.; Beji, L.; Amouri, A.; Mallem, M. Dynamic behavior of an interactive XY—6 DoF simulator for people with reduced mobility. In Proceedings of the CCTA 2020—4th IEEE Conference on Control Technology and Applications, Montreal, QC, Canada, 24–26 August 2020; pp. 522–527. [Google Scholar]
- Lahajnar, L.; Kos, A.; Nemec, B. Skiing robot—Design, control, and navigation in unstructured environment. Robotica 2009, 27, 567–577. [Google Scholar] [CrossRef]
- Nimmervoll, F.; Eckerstorfer, R.; Braumann, J.; Petutschnigg, A.; Sternad, B. Method to Investigate Multi-Axis Release Action of Ski Safety Bindings: A New Approach for Testing in Research and Development. Front. Sports Act. Living 2021, 3, 585775. [Google Scholar] [CrossRef]
- Petrič, T.; Nemec, B.; Babič, J.; Žlajpah, L. Multilayer control of skiing robot. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4832–4837. [Google Scholar]
- Petrič, T.; Peternel, L.; Gams, A.; Nemec, B.; Žlajpah, L. Navigation methods for the skiing robot. Int. J. Humanoid Robot. 2013, 10, 1350029. [Google Scholar] [CrossRef]
- Rossi, S.; Cappa, P.; Patanè, F. Experimental measurement of the ski boot stiffness in sagittal and frontal planes. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Lake Buena Vista, FL, USA, 13–19 November 2009; pp. 183–186. [Google Scholar]
- Saga, T.; Saga, N. Alpine skiing robot using a passive turn with variable mechanism. Appl. Sci. 2018, 8, 2643. [Google Scholar] [CrossRef]
- Saga, N.; Kono, K. Experimental study on alpine skiing turn using passive skiing robot. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2009; pp. 1044–1050. [Google Scholar]
- Thorwartl, C.; Tschepp, A.; Holzer, H.; Stöggl, T. Assessing Torsional Deflection of Alpine Skis A Proof of Concept Utilizing Printed Electronics in a Laboratory Setting. In Proceedings of the 2023 IEEE SENSORS, Vienna, Austria, 29 October–1 November 2023; pp. 1–4. [Google Scholar]
- Thorwartl, C.; Kröll, J.; Tschepp, A.; Holzer, H.; Teufl, W.; Stöggl, T. Validation of a Sensor-Based Dynamic Ski Deflection Measurement in the Lab and Proof-of-Concept Field Investigation. Sensors 2022, 22, 5768. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Yi, J. Modeling and kinematics simulation of freestyle skiing robot. Acta Tech. CSAV (Ceskoslovensk Akad. Ved) 2017, 62, 321–334. [Google Scholar]
- Yang, L.; Wang, Z.; Wang, L.; Fu, Y.; Yin, Y.; Gao, F.; Gao, H. Obstacle Avoidance Strategy for a Novel Skiing Robot in Unknown Snow Environments. IEEE Robot. Autom. Lett. 2024, 9, 3203–3210. [Google Scholar] [CrossRef]
- Zhenyu, W.; Baichun, L.; Tianbiao, Y.; Wanshan, W.; Jian, L. Research on key technology of freestyle skiing robot in the aid-slippery stage. In Proceedings of the IEEE International Conference on Industrial Technology, Seville, Spain, 17–19 March 2015; pp. 3202–3206. [Google Scholar]
- Truong, J.; Bulota, M.; Desbiens, A.L. Historical Trends in Alpine Ski Design: How Skis Have Evolved Over the Past Century. Proceedings 2020, 49, 135. [Google Scholar] [CrossRef]
- Lind, D.A.; Sanders, S.P. Equipment: Properties and Performance. In The Physics of Skiing: Skiing at the Triple Point; Springer: New York, NY, USA, 2004; pp. 44–77. [Google Scholar]
- Ma, J.; Chen, H.; Liu, X.; Yang, Y.; Huang, D. Adaptive Impedance Control of a Human–Robotic System Based on Motion Intention Estimation and Output Constraints. Appl. Sci. 2025, 15, 1271. [Google Scholar] [CrossRef]
- Jeon, H.; Kim, D.-W.; Kang, B.-Y. Deep reinforcement learning for cooperative robots based on adaptive sentiment feedback. Expert Syst. Appl. 2024, 243, 121198. [Google Scholar] [CrossRef]
- Hoseinnezhad, R. A Comprehensive Review of Deep Learning Techniques in Mobile Robot Path Planning: Categorization and Analysis. Appl. Sci. 2025, 15, 2179. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).