
Roll/Tip-Over Risk Analysis of Agricultural Self-Propelled Machines Using Airborne LiDAR Data: GIS-Based Approach


Abstract
1. Introduction
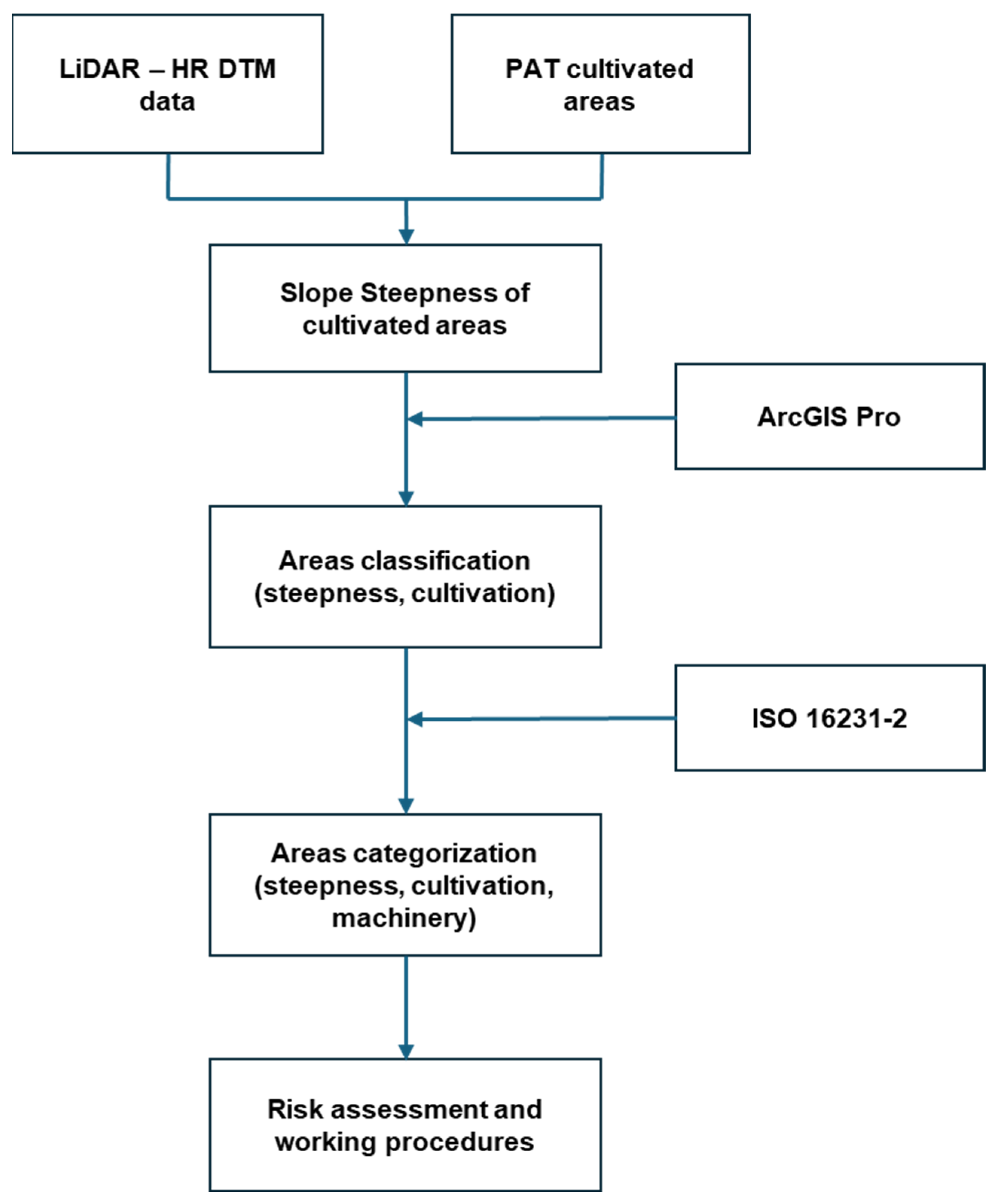
2. Materials and Methods
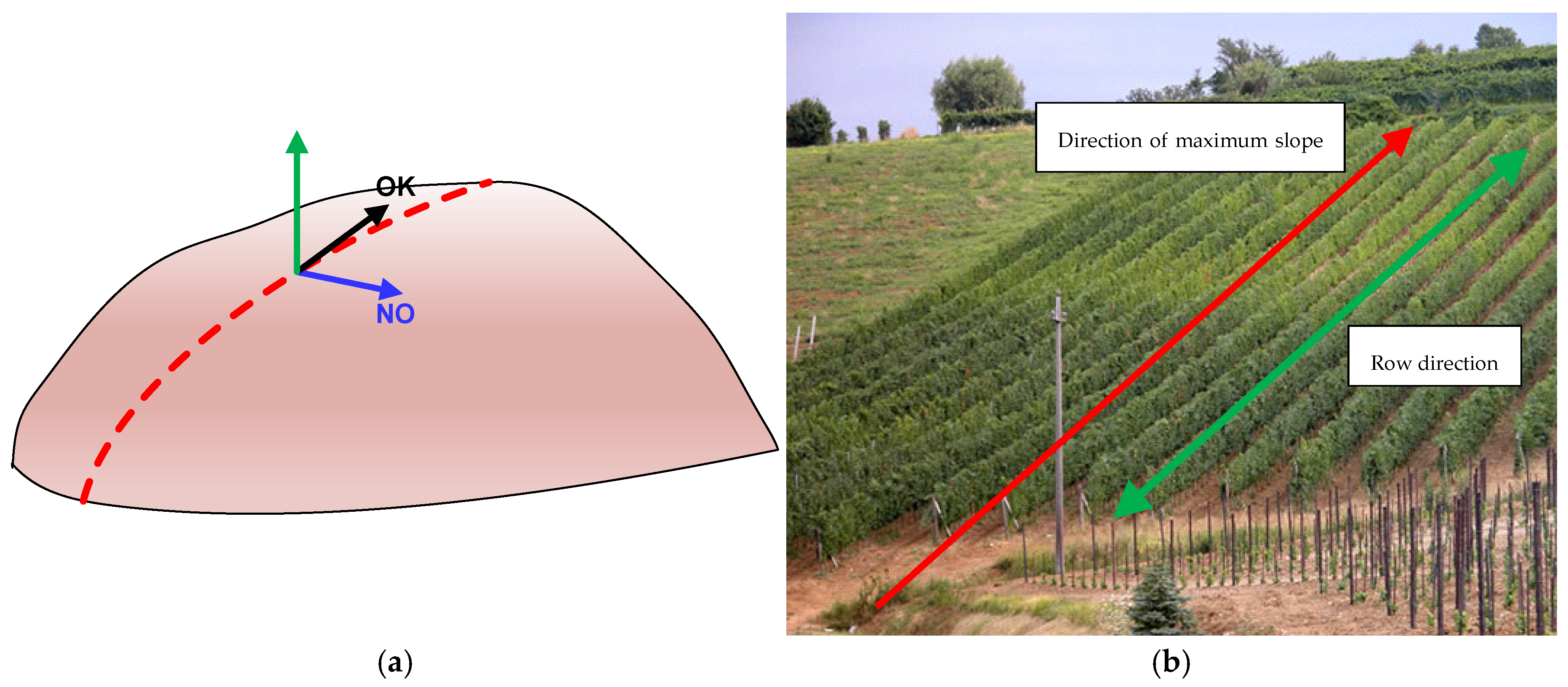
2.1. Slope Steepness of Cultivated Areas
2.2. Areas Classification
2.3. Areas Categorization
2.4. Risk Assessment Data
- Zonal histograms were developed on the vector parcels to associate the amount of the area potentially exposed to roll-over/tip-over risk when using specific agricultural machines according to the cultivation type of each area.
- Safety procedures were developed for the proper use of machinery in each area, including information concerning allowed maneuvers, allowed implements, etc., In other words, combining data provided by the EN ISO 16231-2 standard and the steepness of the field, it is possible to identify for each type of machinery the slope areas where the machine can work according to good agricultural practice in any direction, those where only certain maneuvers can be carried out safely, and those where the machine cannot be used.
3. Results
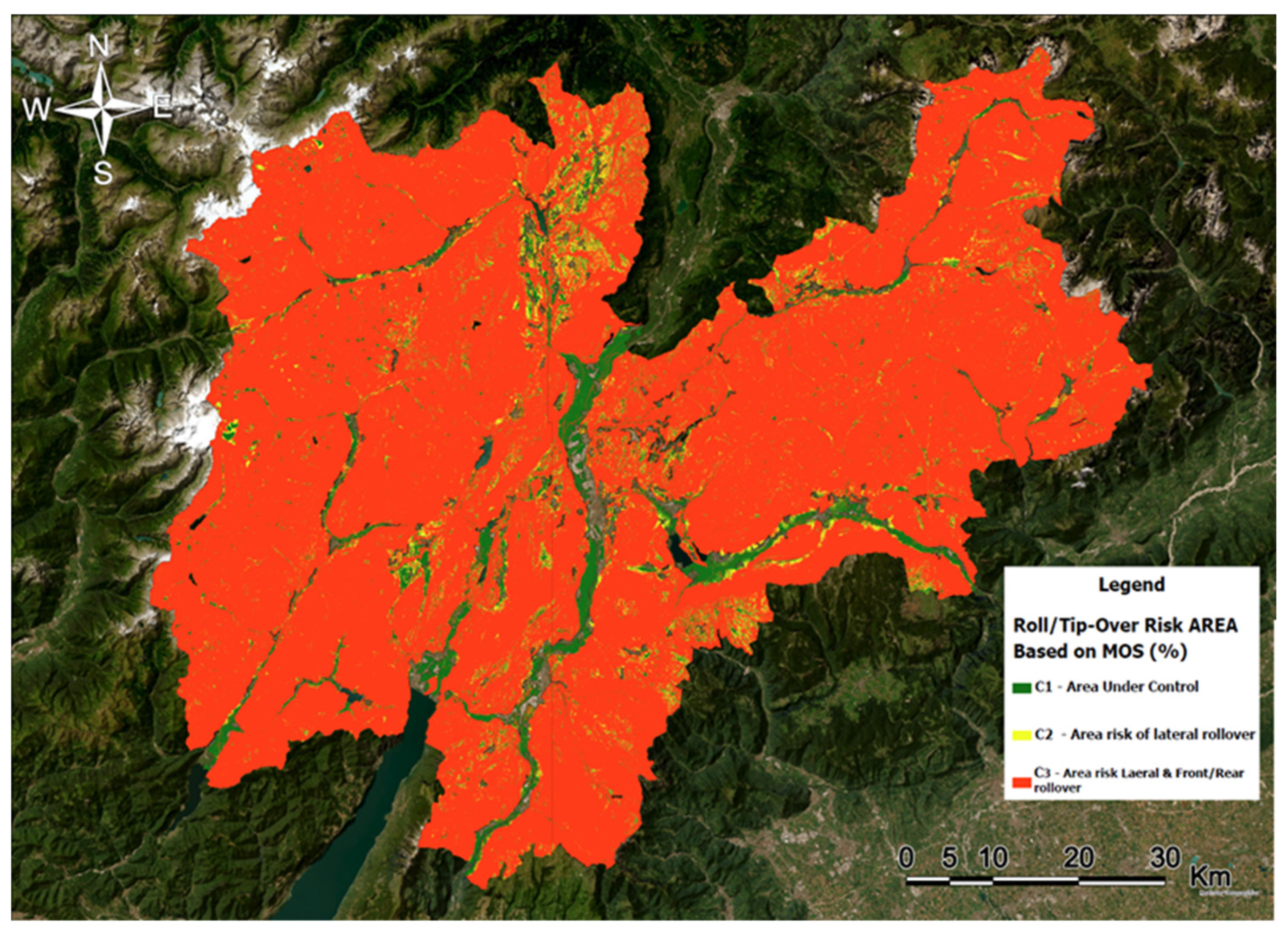
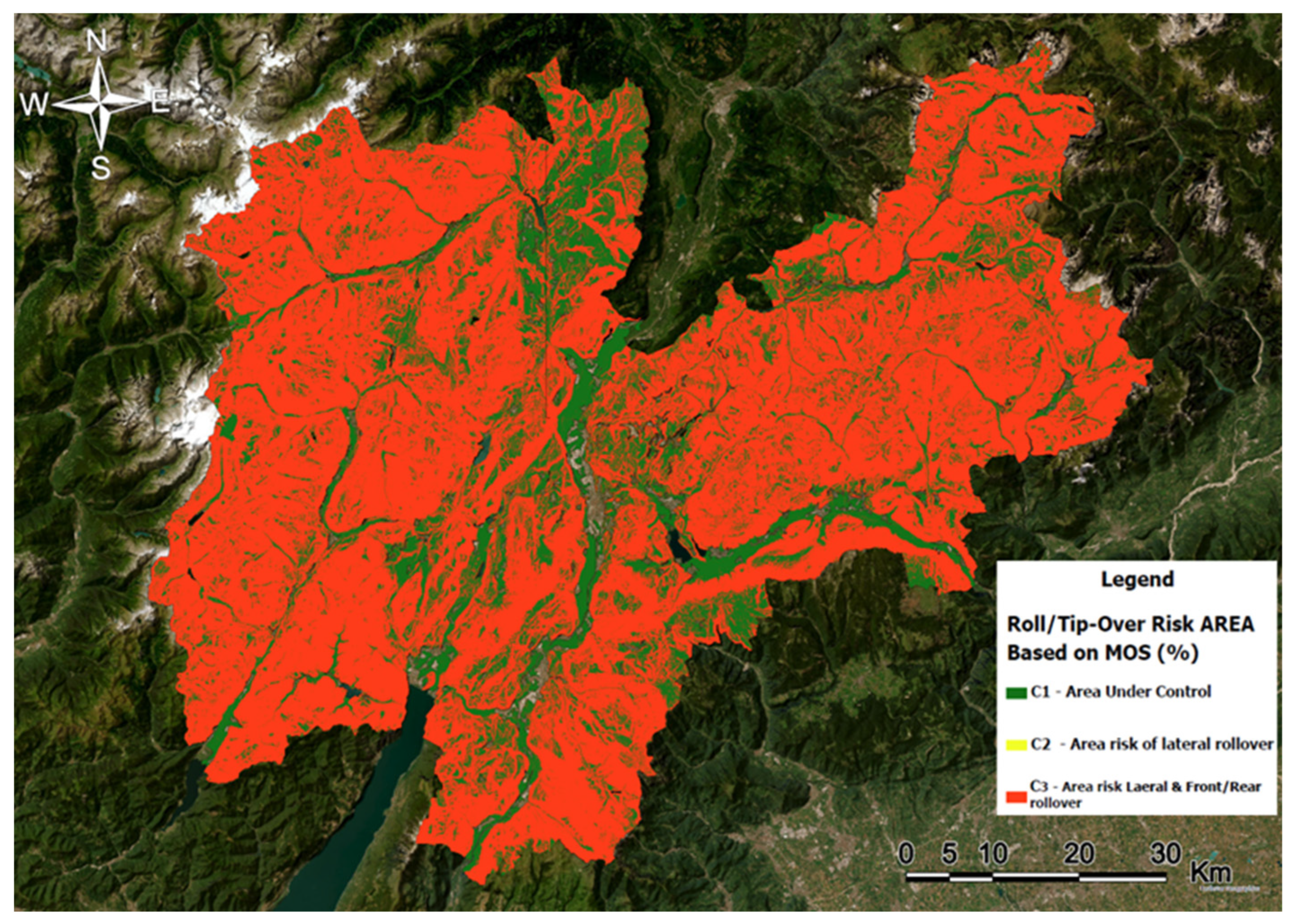
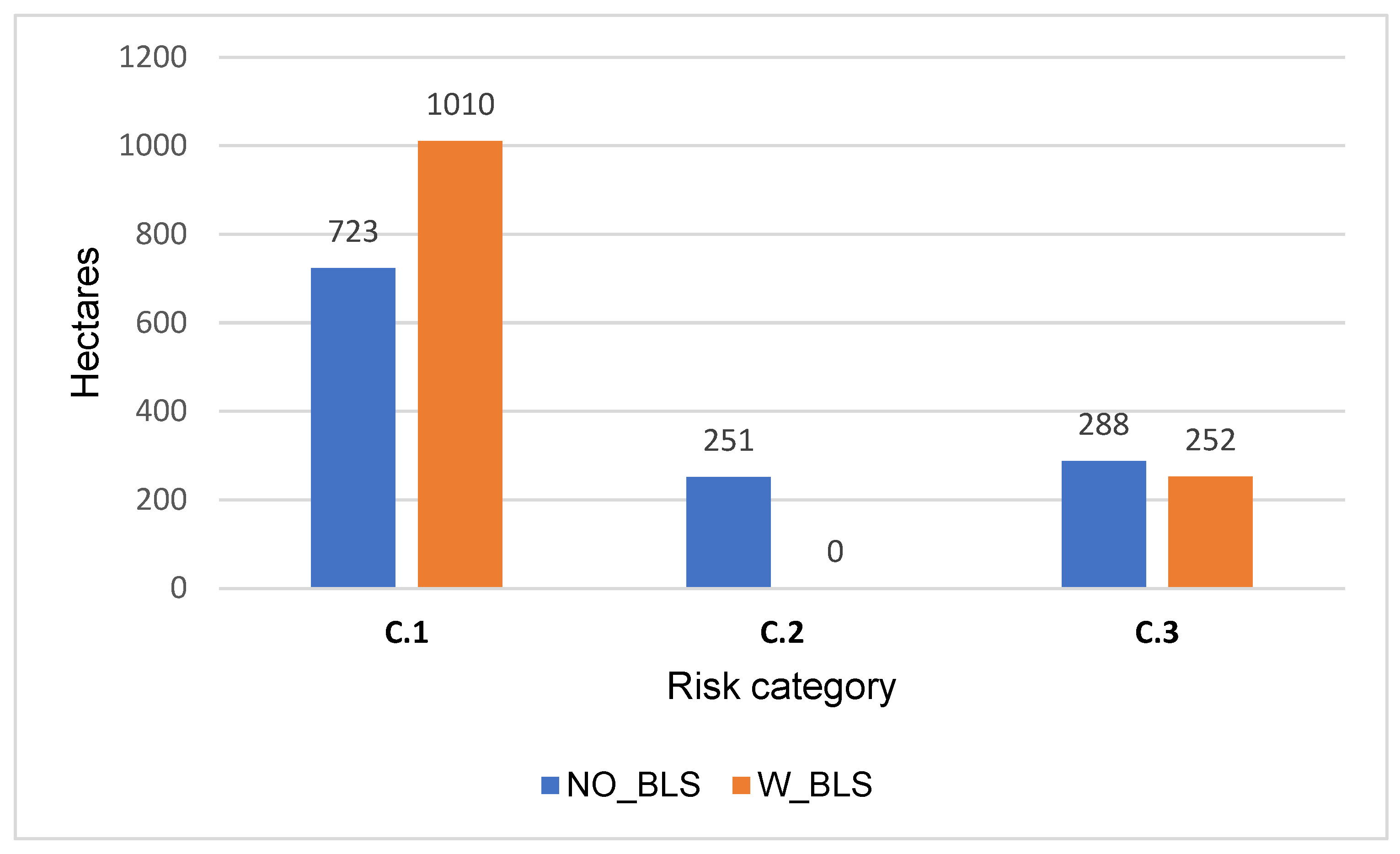
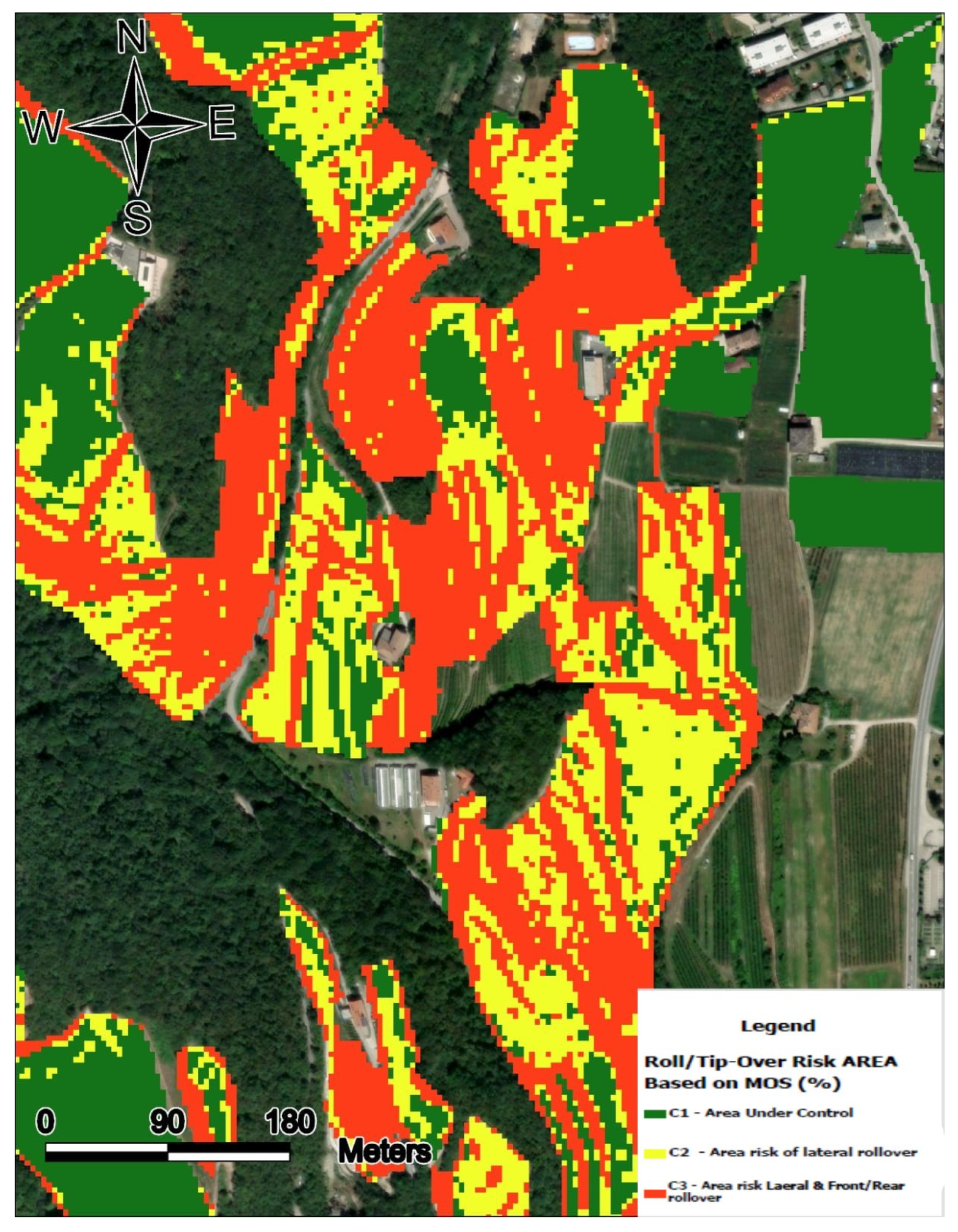
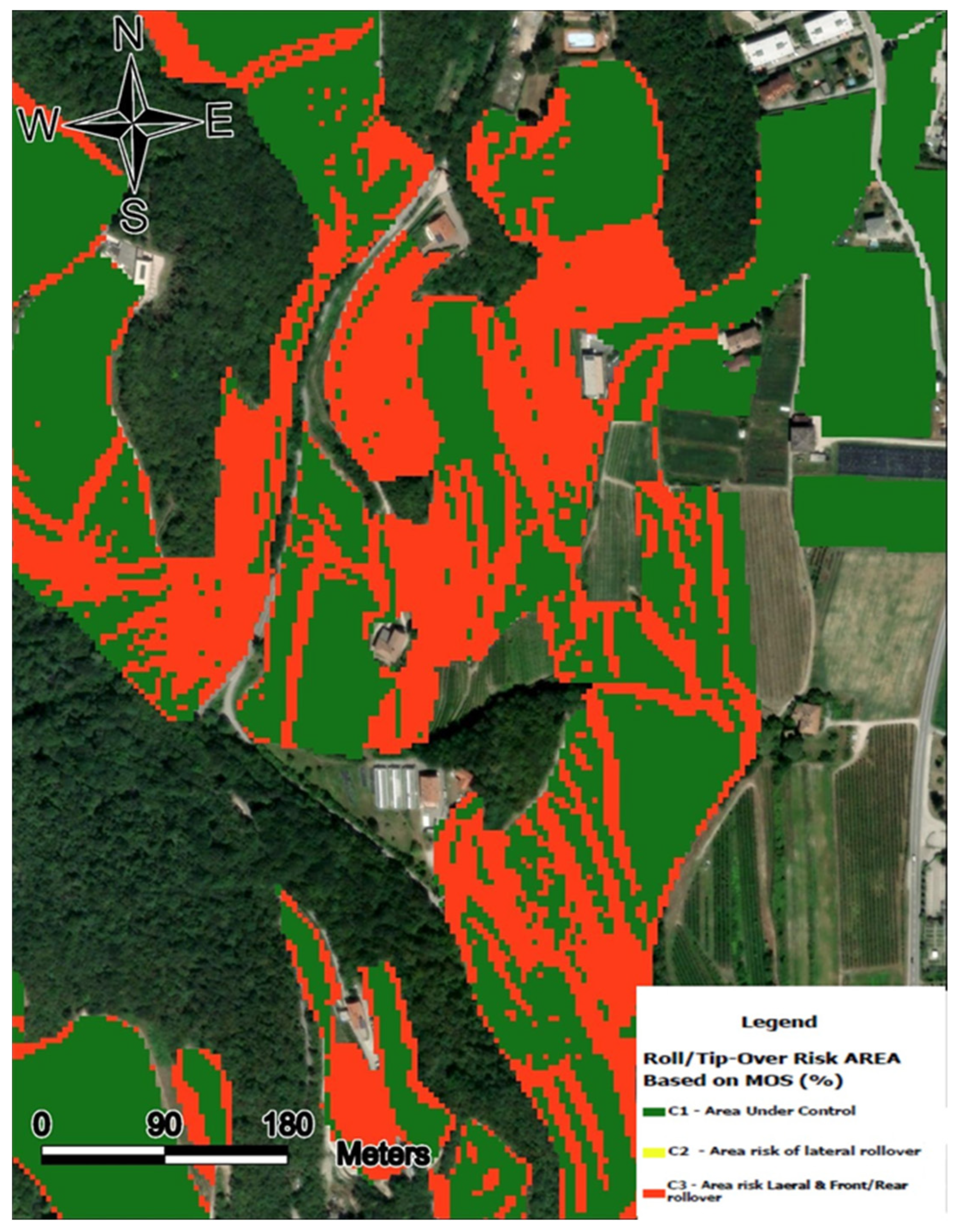
3.1. Categorization
- C1 (where there is no roll-over risk due to the slope steepness);
- C2 (where there is the risk of lateral roll-over);
- C3 (where there is a risk of both lateral and front/rear roll-over).
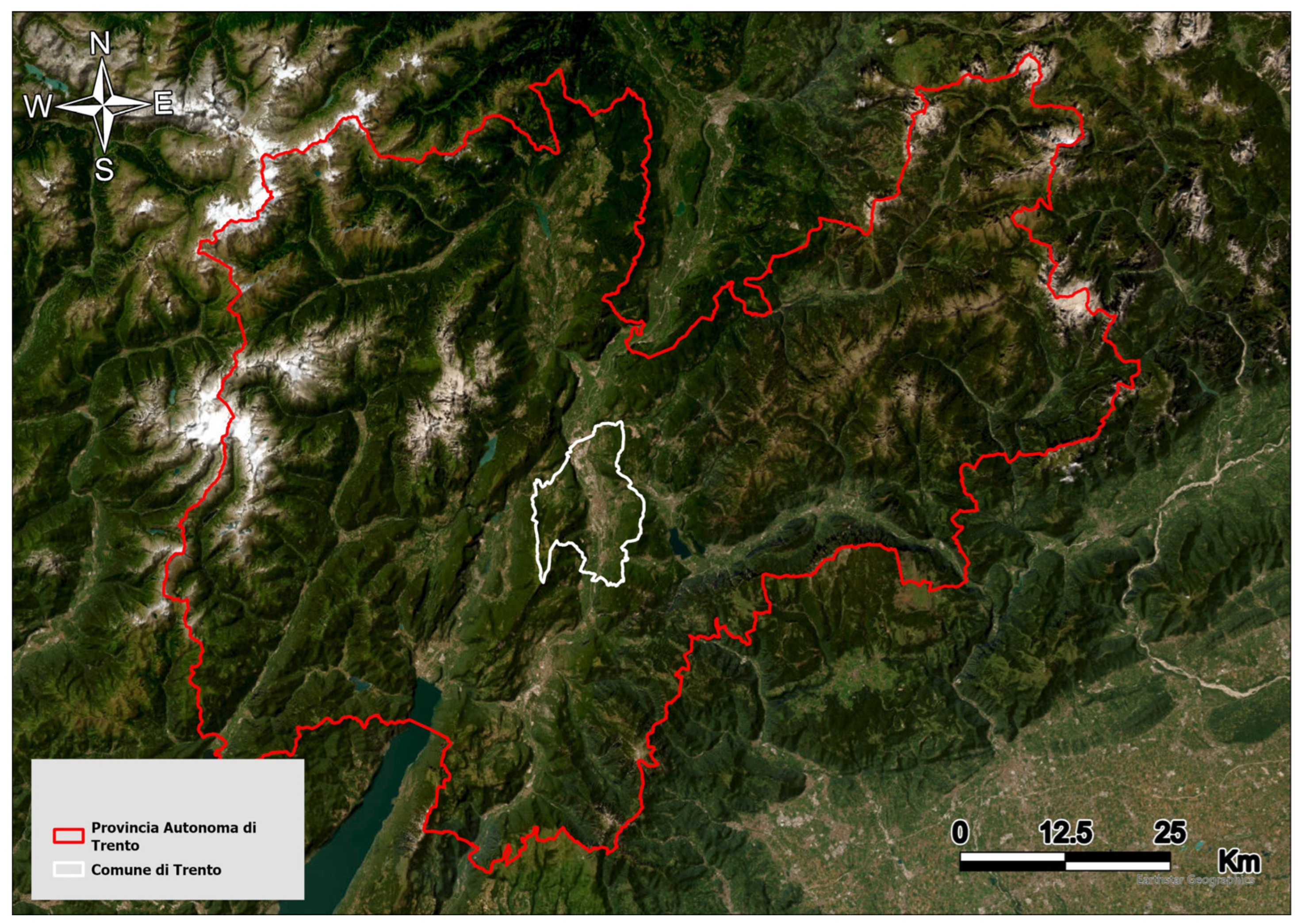
3.2. Case Study
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ichihara, G.; Matsukawa, T.; Kitamura, F.; Yokoyama, K. Risk factors for occupational accidents in agricultural enterprises in Japan. Ind. Health 2019, 57, 627–636. [Google Scholar] [CrossRef]
- Baraza, X.; Cugueró-Escofet, N. Severity of occupational agricultural accidents in Spain, 2013–2018. Saf. Sci. 2021, 143, 105422. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M.; Haber, N.; Puri, D. The Impact of Human Error in the Use of Agricultural Tractors: A Case Study Research in Vineyard Cultivation in Italy. Agriculture 2018, 8, 82. [Google Scholar] [CrossRef]
- Mishra, D.; Satapathy, S. An Integrated SWARA, QFD, and ISM Approach for Agricultural Injuries in India. Int. J. Decis. Support Syst. Technol. 2020, 12, 1–24. [Google Scholar] [CrossRef]
- Ivascu, L.; Sarfraz, M.; Mohsin, M.; Naseem, S.; Ozturk, I. The Causes of Occupational Accidents and Injuries in Romanian Firms: An Application of the Johansen Cointegration and Granger Causality Test. Int. J. Environ. Res. Public Health 2021, 18, 7634. [Google Scholar] [CrossRef] [PubMed]
- Kogler, R.; Quendler, E.; Boxberger, J. Analysis of occupational accidents with agricultural machinery in the period 2008–2010 in Austria. Saf. Sci. 2015, 72, 319–328. [Google Scholar] [CrossRef]
- Biocca, M.; Aiello, L.; Baldoin, C. Rovitis 4.0: An autonomous robot for spraying in vineyards. In Proceedings of the Safety, Health and Welfare in Agriculture and Agro-Food Systems, SHWA 2020, Ragusa, Italy, 16–19 September 2020; Springer: Cham, Switzerland, 2020; pp. 176–185. [Google Scholar] [CrossRef]
- Gattamelata, D.; Puri, D.; Vita, L.; Fargnoli, M. A Full Assistance System (FAS) for the Safe Use of the Tractor’s Foldable Rollover Protective Structure (FROPS). AgriEngineering 2023, 5, 218–235. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M. NOSACQ-50 for Safety Climate Assessment in Agricultural Activities: A Case Study in Central Italy. Int. J. Environ. Res. Public Health 2020, 17, 9177. [Google Scholar] [CrossRef]
- INAIL, Occupational Accidents Statistics. Available online: https://www.inail.it/portale/it/inail-comunica/pubblicazioni/dati-inail/dati-inail-dettaglio.2024.03.dati-inail-anno-2024.html (accessed on 15 January 2025).
- Kim, K.; Kim, H.; Lee, M.; Jung, W.; Choi, D. Incidence Rates of Agricultural Machine-Related Injuries in South Korea. Int. J. Environ. Res. Public Health 2022, 19, 15588. [Google Scholar] [CrossRef]
- Mayrhofer, H.; Quendler, E.; Boxberger, J. Occupational incidents with self-propelled machinery in Austrian agriculture. J. Agromed. 2013, 18, 359–367. [Google Scholar] [CrossRef]
- Antunes, S.M.; Cordeiro, C.; Teixeira, H.M. Analysis of fatal accidents with tractors in the Centre of Portugal: Ten years analysis. Forensic Sci. Int. 2018, 287, 74–80. [Google Scholar] [CrossRef] [PubMed]
- Rautiainen, R.H.; Ledolter, J.; Donham, K.J.; Ohsfeldt, R.L.; Zwerling, C. Risk factors for serious injury in Finnish agriculture. Am. J. Ind. Med. 2009, 52, 419–428. [Google Scholar] [CrossRef]
- Vigoroso, L.; Caffaro, F.; Tronci, M.; Fargnoli, M. Ergonomics and design for safety: A scoping review and bibliometric analysis in the industrial engineering literature. Saf. Sci. 2025, 185, 106799. [Google Scholar] [CrossRef]
- Facchinetti, D.; Santoro, S.; Galli, L.E.; Pessina, D. Agricultural Tractor Roll-Over Related Fatalities in Italy: Results from a 12 Years Analysis. Sustainability 2021, 13, 4536. [Google Scholar] [CrossRef]
- Chowdhury, M.; Ali, M.; Habineza, E.; Reza, M.N.; Kabir, M.S.N.; Lim, S.-J.; Choi, I.-S.; Chung, S.-O. Analysis of Rollover Characteristics of a 12 kW Automatic Onion Transplanter to Reduce Stability Hazards. Agriculture 2023, 13, 652. [Google Scholar] [CrossRef]
- Vigoroso, L.; Caffaro, F.; Micheletti Cremasco, M.; Cavallo, E. Innovating Occupational Safety Training: A Scoping Review on Digital Games and Possible Applications in Agriculture. Int. J. Environ. Res. Public Health 2021, 18, 1868. [Google Scholar] [CrossRef]
- Fargnoli, M.; Parrella, E.; Costantino, F.; Tronci, M. Hybrid solutions for agricultural vehicles: A comparative life cycle analysis from the users’ standpoint. J. Clean. Prod. 2024, 485, 144406. [Google Scholar] [CrossRef]
- O’Connor, T.; Kinsella, J.; O’Hora, D.; McNamara, J.; Meredith, D. Safer tomorrow: Irish dairy farmers’ self-perception of their farm safety practices. J. Saf. Res. 2022, 82, 450–458. [Google Scholar] [CrossRef] [PubMed]
- Fargnoli, M.; Vita, L.; Gattamelata, D.; Laurendi, V.; Tronci, M. A reverse engineering approach to enhance machinery design for safety. In DS 70, Proceedings of the DESIGN 2012, the 12th International Design Conference; Dubrovnik, Croatia, 21–24 May 2012, Marjanovic, D., Storga, M., Pavkovic, N., Bojcetic, N., Eds.; International Design Conference: Dubrovnik, Croatia, 2012; pp. 627–636. ISBN 978-953-7738-17-4. [Google Scholar]
- Caffaro, F.; Micheletti Cremasco, M.; Roccato, M.; Cavallo, E. It does not occur by chance: A mediation model of the influence of workers’ characteristics, work environment factors, and near misses on agricultural machinery-related accidents. Int. J. Occup. Environ. Health 2017, 23, 52–59. [Google Scholar] [CrossRef]
- Franceschetti, B.; Rondelli, V.; Capacci, E. Lateral Stability Performance of Articulated Narrow-Track Tractors. Agronomy 2021, 11, 2512. [Google Scholar] [CrossRef]
- Capacci, E.; Franceschetti, B.; Guzzomi, A.; Rondelli, V. Energy Absorption in Actual Tractor Rollovers with Different Tire Configurations. Int. J. Environ. Res. Public Health 2021, 18, 6517. [Google Scholar] [CrossRef] [PubMed]
- Fredi, P.; Lupia Palmieri, E. Morphological Regions of Italy. In Landscapes and Landforms of Italy. World Geomorphological Landscapes; Soldati, M., Marchetti, M., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Cecchini, M.; Zambon, I.; Monarca, D.; Piccioni, F.; Marucci, A.; Colantoni, A. Spatial Analysis for Detecting Recent Work Accidents in Agriculture in Italy. In Innovative Biosystems Engineering for Sustainable Agriculture, Forestry and Food Production; Coppola, A., Di Renzo, G., Altieri, G., D’Antonio, P., Eds.; MID-TERM AIIA 2019; Lecture Notes in Civil Engineering; Springer: Cham, Switzerland, 2020; Volume 67. [Google Scholar] [CrossRef]
- Vita, L.; Gattamelata, D.; Pessina, D. Retrofitting Agricultural Self-Propelled Machines with Roll-Over and Tip-Over Protective Structures. Safety 2021, 7, 46. [Google Scholar] [CrossRef]
- Kogler, R.; Quendler, E.; Boxberger, J. Occupational accidents with agricultural machinery in Austria. J. Agromed. 2016, 21, 61–70. [Google Scholar] [CrossRef] [PubMed]
- Gattamelata, D.; Vita, L.; Fargnoli, M. Machinery Safety and Ergonomics: A Case Study Research to Augment Agricultural Tracklaying Tractors’ Safety and Usability. Int. J. Environ. Res. Public Health 2021, 18, 8643. [Google Scholar] [CrossRef]
- Wang, L.; Liu, F.; Song, Z.; Ni, Y.; He, Z.; Zhai, Z.; Zhu, Z.; Zhou, Z.; Song, Z.; Li, Z. Advances in tractor rollover and stability control: Implications for off-road driving safety. Comp. Electron. Agric. 2024, 226, 109483. [Google Scholar] [CrossRef]
- Kim, W.S.; Siddique, M.A.A.; Kim, Y.-J.; Jung, Y.-J.; Baek, S.-M.; Baek, S.-Y.; Kim, Y.-S.; Lim, R.-G. Simulation of the Rollover Angle of a Self-Propelled Radish Harvester for Different Load Conditions. Appl. Sci. 2022, 12, 10733. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M. Safety Vision of Agricultural Tractors: An Engineering Perspective Based on Recent Studies (2009–2019). Safety 2020, 6, 1. [Google Scholar] [CrossRef]
- Alfaro-Lopez, J.R.; Perez-Ezcurdia, A.; Latorre-Biel, J.-I.; Arana-Navarro, I.; Benito-Amurrio, M.; Villanueva-Roldán, P. The Integration of Mechanical Energy Absorbers into Rollover Protective Structures to Improve the Safety of Agricultural Tractors in the Event of Rollover. Agriculture 2024, 14, 1050. [Google Scholar] [CrossRef]
- Gao, J.; Yin, C.; Yuan, G. Development of an Anti-rollover Warning and Active Intervention Controller for Wheeled Tractor. Recent Pat. Eng. 2024, 18, 55–66. [Google Scholar] [CrossRef]
- Casazza, C.; Martelli, R.; Rondelli, V. Evaluation of a commercial tractor safety monitoring system using a reverse engineering procedure. J. Agric. Saf. Health 2016, 22, 215–225. [Google Scholar] [CrossRef]
- Sun, D.; Chen, D.; Wang, S.; Wang, X. A dynamic instability detection and prediction system for high clearance tractor. IFAC-Pap. 2016, 49, 50–54. [Google Scholar] [CrossRef]
- Chowdhury, M.; Islam, M.N.; Iqbal, M.Z.; Islam, S.; Lee, D.-H.; Kim, D.-G.; Jun, H.-J.; Chung, S.-O. Analysis of Overturning and Vibration during Field Operation of a Tractor-Mounted 4-Row Radish Collector toward Ensuring User Safety. Machines 2020, 8, 77. [Google Scholar] [CrossRef]
- Cavallo, E.; Langle, T.; Bueno, D.; Tsukamoto, S.; Görücü, S.; Murphy, D. Rollover Protective Structure (ROPS) Retrofitting on Agricultural Tractors: Goals and Approaches in Different Countries. J. Agromed. 2014, 19, 208–209. [Google Scholar] [CrossRef]
- Tinc, P.J.; Ayers, P.; May, J.J.; Purschwitz, M.A.; Park, S.; Bayes, B.; Sorensen, J. Implementing a National Tractor Safety Program: Using “Whole System in a Room” to Mobilize Partners and Implement Solutions. J. Agromed. 2016, 21, 127–131. [Google Scholar] [CrossRef] [PubMed]
- Glasscock, D.J.; Rasmussen, K.; Carstensen, O.; Hansen, O.N. Psychosocial factors and safety behaviour as predictors of accidental work injuries in farming. Work Stress 2006, 20, 173–189. [Google Scholar] [CrossRef]
- Irwin, A.; Poots, J. Investigation of UK farmer go/no-go decisions in response to tractor-based risk scenarios. J. Agromed. 2018, 23, 154–165. [Google Scholar] [CrossRef]
- Caffaro, F.; Cremasco, M.M.; Roccato, M.; Cavallo, E. Drivers of farmers’ intention to adopt technological innovations in Italy: The role of information sources, perceived usefulness, and perceived ease of use. J. Rural Stud. 2020, 76, 264–271. [Google Scholar] [CrossRef]
- Qi, X.; Yao, X.; Cong, X.; Li, S.; Han, M.; Tao, Z.; Yang, X.; Qi, X.; Shi, F.; Wang, S. Profile and risk factors in farmer injuries: A review based on Haddon matrix and 5 E’s risk reduction strategy. Front. Public Health 2024, 12, 1322884. [Google Scholar] [CrossRef]
- Cividino, S.R.S.; Pergher, G.; Gubiani, R.; Moreschi, C.; Da Broi, U.; Vello, M.; Rinaldi, F. Definition of a Methodology for Gradual and Sustainable Safety Improvements on Farms and Its Preliminary Applications. Agriculture 2018, 8, 7. [Google Scholar] [CrossRef]
- Vigoroso, L.; Caffaro, F.; Cavallo, E. Warning against Critical Slopes in Agriculture: Comprehension of Targeted Safety Signs in a Group of Machinery Operators in Italy. Int. J. Environ. Res. Public Health 2019, 16, 611. [Google Scholar] [CrossRef]
- Görücü, S.; Cavallo, E.; Murphy, D. Perceptions of Tilt Angles of an Agricultural Tractor. J. Agromed. 2014, 19, 5–14. [Google Scholar] [CrossRef] [PubMed]
- Tillapaugh, J.A.; Murphy, D.J.; Sommer, I.J.; Garvey, P.M. Operator assessment of tractor roll angle with and without a tractor stability visual feedback device. J. Agric. Saf. Health 2010, 16, 249–264. [Google Scholar] [CrossRef] [PubMed]
- ISO 16231-2:2015; Self-Propelled Agricultural Machinery. Assessment of Stability—Part 2: Determination of Static Stability and Test Procedures. International Organization for Standardization: Genevan, Switzerland, 2015. Available online: https://www.iso.org/standard/61583.html (accessed on 22 January 2025).
- Provincia Autonoma di Trento. Stem-WebGIS. Available online: https://siat.provincia.tn.it/stem/ (accessed on 22 January 2025).
- Provincia Autonoma di Trento. PAT Statistics. Available online: http://www.statistica.provincia.tn.it/ (accessed on 22 January 2025).
- Jin, S.; Sun, X.; Wu, F.; Su, Y.; Li, Y.; Song, S.; Guo, Q. Lidar sheds new light on plant phenomics for plant breeding and management: Recent advances and future prospects. ISPRS J. Photogramm. Remote Sens. 2021, 171, 202–223. [Google Scholar] [CrossRef]
- Iqbal, J.; Xu, R.; Sun, S.; Li, C. Simulation of an Autonomous Mobile Robot for LiDAR-Based In-Field Phenotyping and Navigation. Robotics 2020, 9, 46. [Google Scholar] [CrossRef]
- Aguiar, A.S.; dos Santos, F.N.; Sobreira, H.; Boaventura-Cunha, J.; Sousa, A.J. Localization and Mapping on Agriculture Based on Point-Feature Extraction and Semiplanes Segmentation From 3D LiDAR Data. Front. Robot. AI 2022, 9, 14. [Google Scholar] [CrossRef]
- ArcGIS Pro. Available online: https://pro.arcgis.com/en/pro-app/latest/get-started/get-started.htm (accessed on 22 January 2025).
- Cecchini, M.; Cossio, F.; Marucci, A.; Monarca, D.; Colantoni, A.; Petrelli, M.; Allegrini, E. Survey on the status of enforcement of European directives on health and safety at work in some Italian farms. J. Food Agric. Environ. 2013, 11, 595–600. [Google Scholar]
- Zambon, I.; Piergentili, A.; Salvati, L.; Monarca, D.; Matyjas-Łysakowska, P.; Colantoni, A. Applied Research for a Safer Future: Exploring Recent Job Accidents in Agriculture, Italy (2012–2017). Processes 2018, 6, 87. [Google Scholar] [CrossRef]
- Bertacchini, A.; Napoletano, G.; Dondi, D.; Larcher, L.; Pavan, P. Optimized energy-aware wireless system for identification of the relative positioning of articulated systems in the free space. IEEE Sens. J. 2014, 14, 1682–1692. [Google Scholar] [CrossRef]
- Liu, B.; Koc, A.B. Field tests of a tractor rollover detection and emergency notification system. J. Agric. Saf. Health 2015, 21, 113–127. [Google Scholar] [CrossRef]
- Cutini, M.; Brambilla, M.; Bisaglia, C.; Melzi, S.; Sabbioni, E.; Vignati, M.; Cavallo, E.; Laurendi, V. A Study of the Lateral Stability of Self-Propelled Fruit Harvesters. Agriculture 2017, 7, 92. [Google Scholar] [CrossRef]
- Bietresato, M.; Pavan, S.; Cozzi, G.; Sartori, L. A numerical approach for evaluating and properly setting self-propelled forage harvesters. Trans. ASABE 2013, 56, 5–14. [Google Scholar] [CrossRef]
- Jang, M.-K.; Hwang, S.-J.; Nam, J.-S. Simulation Study for Overturning and Rollover Characteristics of a Tractor with an Implement on a Hard Surface. Agronomy 2022, 12, 3093. [Google Scholar] [CrossRef]
- Kang, S.; Kim, Y.; Park, H.; Kim, Y.; Woo, S.; Uyeh, D.D.; Ha, Y. Rollover Safety and Workable Boundary Suggestion of an Agricultural Platform with Different Attachments. Agriculture 2022, 12, 1148. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M.; Puri, D. Applying Hierarchical Task Analysis to Depict Human Safety Errors during Pesticide Use in Vineyard Cultivation. Agriculture 2019, 9, 158. [Google Scholar] [CrossRef]
- Cil, M.; Gedik, T. Research on factors affecting the risk-taking behavior of personnel working in the forest products sector. Int. J. Occup. Saf. Ergon. 2022, 28, 2315–2323. [Google Scholar] [CrossRef]
- Špička, J. Socio-Demographic Drivers of the Risk-Taking Propensity of Micro Farmers: Evidence from the Czech Republic. J. Entrepren. Emerg. Econ. 2020, 12, 569–590. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M. Safety Climate and the Impact of the COVID-19 Pandemic: An Investigation on Safety Perceptions among Farmers in Italy. Safety 2021, 7, 52. [Google Scholar] [CrossRef]
- Cecchini, M.; Bedini, R.; Mosetti, D.; Marino, S.; Stasi, S. Safety Knowledge and Changing Behavior in Agricultural Workers: An Assessment Model Applied in Central Italy. Saf. Health Work 2018, 9, 164–171. [Google Scholar] [CrossRef]
- Cogato, A.; Pezzuolo, A.; Sørensen, C.G.; De Bei, R.; Sozzi, M.; Marinello, F. A GIS-Based Multicriteria Index to Evaluate the Mechanisability Potential of Italian Vineyard Area. Land 2020, 9, 469. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M.; Haber, N. A fuzzy-QFD approach for the enhancement of work equipment safety: A case study in the agriculture sector. Int. J. Reliab. Saf. 2018, 12, 306–326. [Google Scholar] [CrossRef]
- Cutini, M.; Forte, G.; Maietta, M.; Mazzenga, M.; Mastrangelo, S.; Bisaglia, C. Safety-Critical Manuals for Agricultural Tractor Drivers: A Method to Improve Their Usability. Agriculture 2017, 7, 67. [Google Scholar] [CrossRef]
- Nag, P.K.; Gite, L.P. Farm Accidents and Injuries. In Human-Centered Agriculture. Design Science and Innovation; Nag, P.K., Gite, L.P., Eds.; Springer: Singapore, 2020; pp. 175–204. [Google Scholar] [CrossRef]
- Caffaro, F.; Bagagiolo, G.; Micheletti Cremasco, M.; Vigoroso, L.; Cavallo, E. Tailoring Safety Training Material to Migrant Farmworkers: An Ergonomic User-Centred Approach. Int. J. Environ. Res. Public Health 2020, 17, 2104. [Google Scholar] [CrossRef] [PubMed]
- Rubino, F.M.; Puri, D.; Fargnoli, M.; Lombardi, M.; Mandić-Rajčević, S.; Colosio, C. Sicurpest: A Prototype of a User-Friendly Tool for Preventive Risk Assessment of Pesticide Use in Agriculture. Toxics 2025, 13, 89. [Google Scholar] [CrossRef] [PubMed]
- Marucci, A.; Colantoni, A.; Zambon, I.; Egidi, G. Precision Farming in Hilly Areas: The Use of Network RTK in GNSS Technology. Agriculture 2017, 7, 60. [Google Scholar] [CrossRef]
- Radočaj, D.; Plaščak, I.; Heffer, G.; Jurišić, M. A Low-Cost Global Navigation Satellite System Positioning Accuracy Assessment Method for Agricultural Machinery. Appl. Sci. 2022, 12, 693. [Google Scholar] [CrossRef]
- Majdan, R.; Abrahám, R.; Tkáč, Z.; Drlička, R.; Matejková, E.; Kollárová, K.; Mareček, J. Static Lateral Stability of Tractor with Rear Wheel Ballast Weights: Comparison of ISO 16231-2 (2015) with Experimental Data Regarding Tyre Deformation. Appl. Sci. 2021, 11, 381. [Google Scholar] [CrossRef]
- Melzi, S.; Sabbioni, E.; Vignati, M.; Cutini, M.; Brambilla, M.; Bisaglia, C.; Cavallo, E. Multibody model of fruit harvesting trucks: Comparison with experimental data and rollover analysis. J. Agric. Eng. 2018, 49, 92–99. [Google Scholar] [CrossRef]
- Rondelli, V.; Capacci, E.; Franceschetti, B. Evaluation of the Stability Behavior of an Agricultural Unmanned Ground Vehicle. Sustainability 2022, 14, 15561. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Activity | Utilized Agricultural Area (%) | Number of Companies (%) |
|---|---|---|
| Viticulture | 5.8 | 36.3 |
| Apple | 8.1 | 28.0 |
| Pasture | 56.2 | 8.7 |
| Machine Type | Lateral Roll/Tip-Over | Front/Rear Tip-Over | ||
|---|---|---|---|---|
| MOS (%) | RSSA (%) | MOS (%) | RSSA (%) | |
| Combine harvester without slope compensation system | 12 | 18 | 18 | 27 |
| Combine harvester with slope compensation system | 20 | 30 | 20 | 30 |
| Combine harvester with body levelling system | 30 | 45 | 30 | 45 |
| Forage harvester | 25 | 37.5 | 25 | 37.5 |
| Field crop sprayer | 15 | 22.5 | 25 | 37.5 |
| Root crop harvester | 10 | 15 | 15 | 22.5 |
| Grape harvester without body levelling system | 20 | 30 | 30 | 45 |
| Grape harvester with body levelling system | 30 | 45 | 30 | 45 |
| Combine harvester without slope compensation system | 12 | 18 | 18 | 27 |
| Combine harvester with slope compensation system | 20 | 30 | 20 | 30 |
| Combine harvester with body levelling system | 30 | 45 | 30 | 45 |
| Forage harvester | 25 | 37.5 | 25 | 37.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Puri, D.; Vita, L.; Gattamelata, D.; Tulliani, V. Roll/Tip-Over Risk Analysis of Agricultural Self-Propelled Machines Using Airborne LiDAR Data: GIS-Based Approach. Machines 2025, 13, 377. https://doi.org/10.3390/machines13050377
Puri D, Vita L, Gattamelata D, Tulliani V. Roll/Tip-Over Risk Analysis of Agricultural Self-Propelled Machines Using Airborne LiDAR Data: GIS-Based Approach. Machines. 2025; 13(5):377. https://doi.org/10.3390/machines13050377
Chicago/Turabian StylePuri, Daniele, Leonardo Vita, Davide Gattamelata, and Valerio Tulliani. 2025. "Roll/Tip-Over Risk Analysis of Agricultural Self-Propelled Machines Using Airborne LiDAR Data: GIS-Based Approach" Machines 13, no. 5: 377. https://doi.org/10.3390/machines13050377
APA StylePuri, D., Vita, L., Gattamelata, D., & Tulliani, V. (2025). Roll/Tip-Over Risk Analysis of Agricultural Self-Propelled Machines Using Airborne LiDAR Data: GIS-Based Approach. Machines, 13(5), 377. https://doi.org/10.3390/machines13050377