
Research on Velocity Feedforward Control and Precise Damping Technology of a Hydraulic Support Face Guard System Based on Displacement Feedback


Abstract
1. Introduction
2. Establishing the Mechanical–Hydraulic Coupling Analysis Model for the Hydraulic Support Face Guard System
2.1. Modelling the Mechanical Sub-Model
2.2. Modelling the Hydraulic Sub-Model
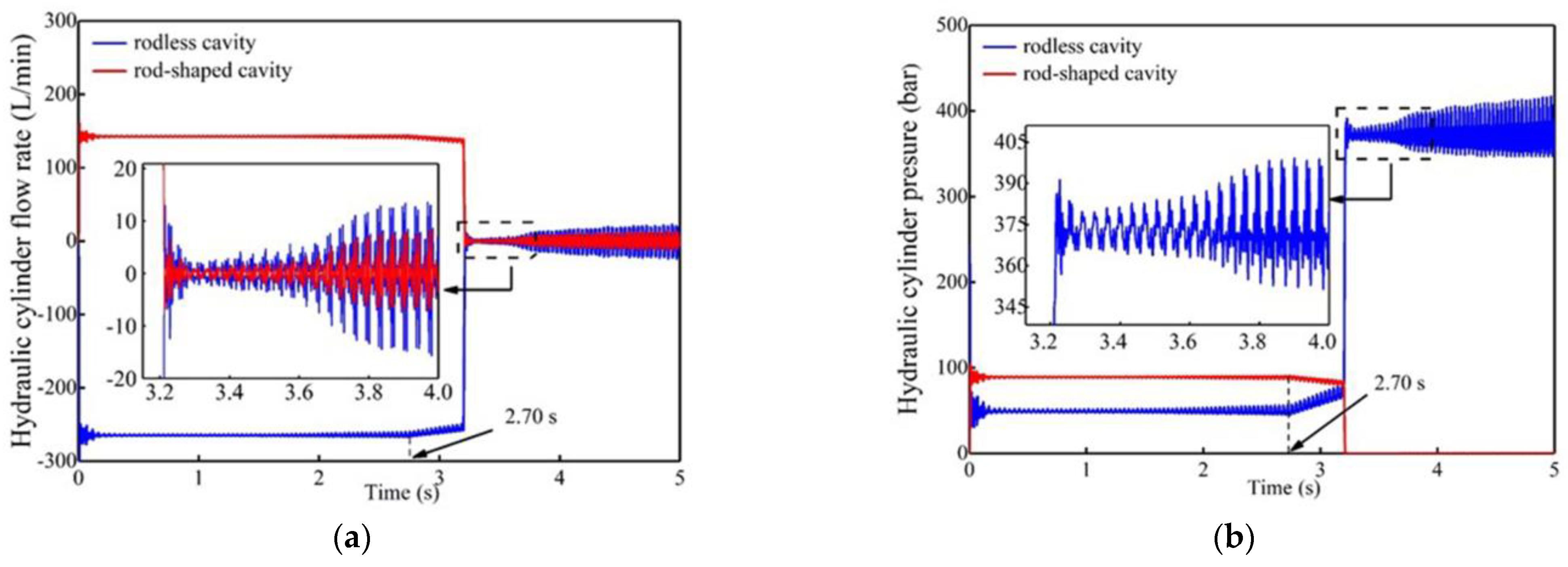
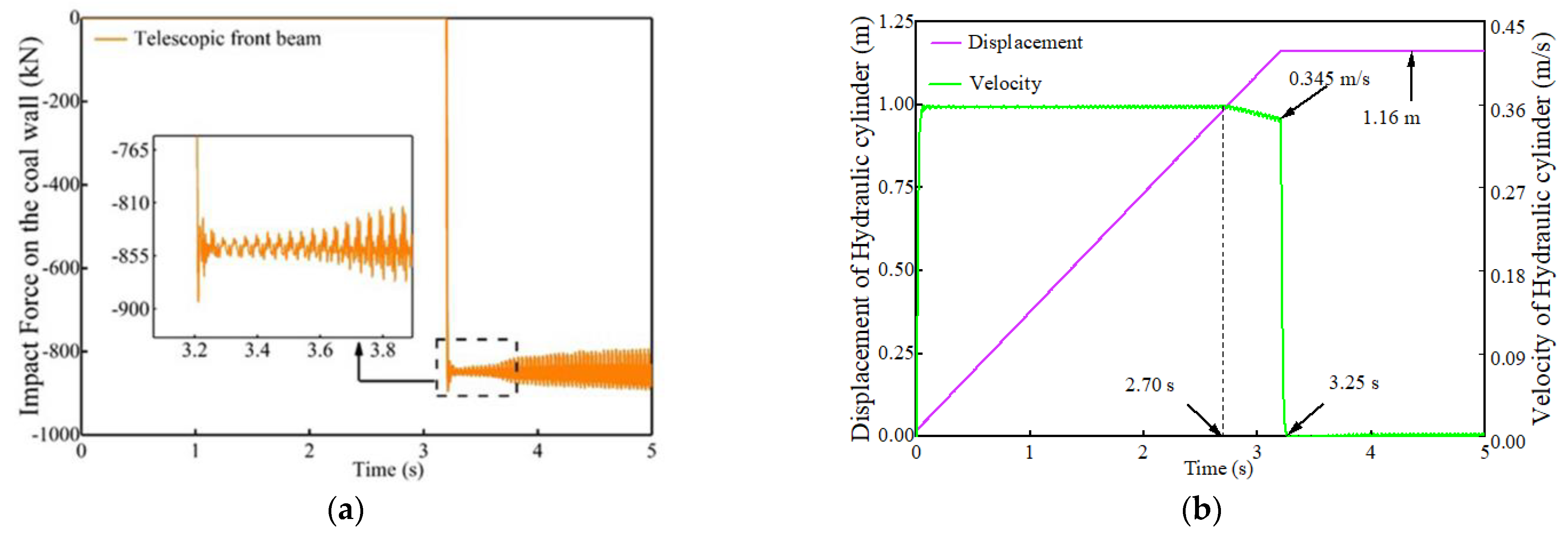
2.3. Static Operation Testing of the Hydraulic Support Face Guard System
3. Designing the Face Guard Structure Controller
3.1. Design of Adaptive Fuzzy PID Controller
3.2. Introduction of Feedforward Compensation
4. Simulation Results and Analysis
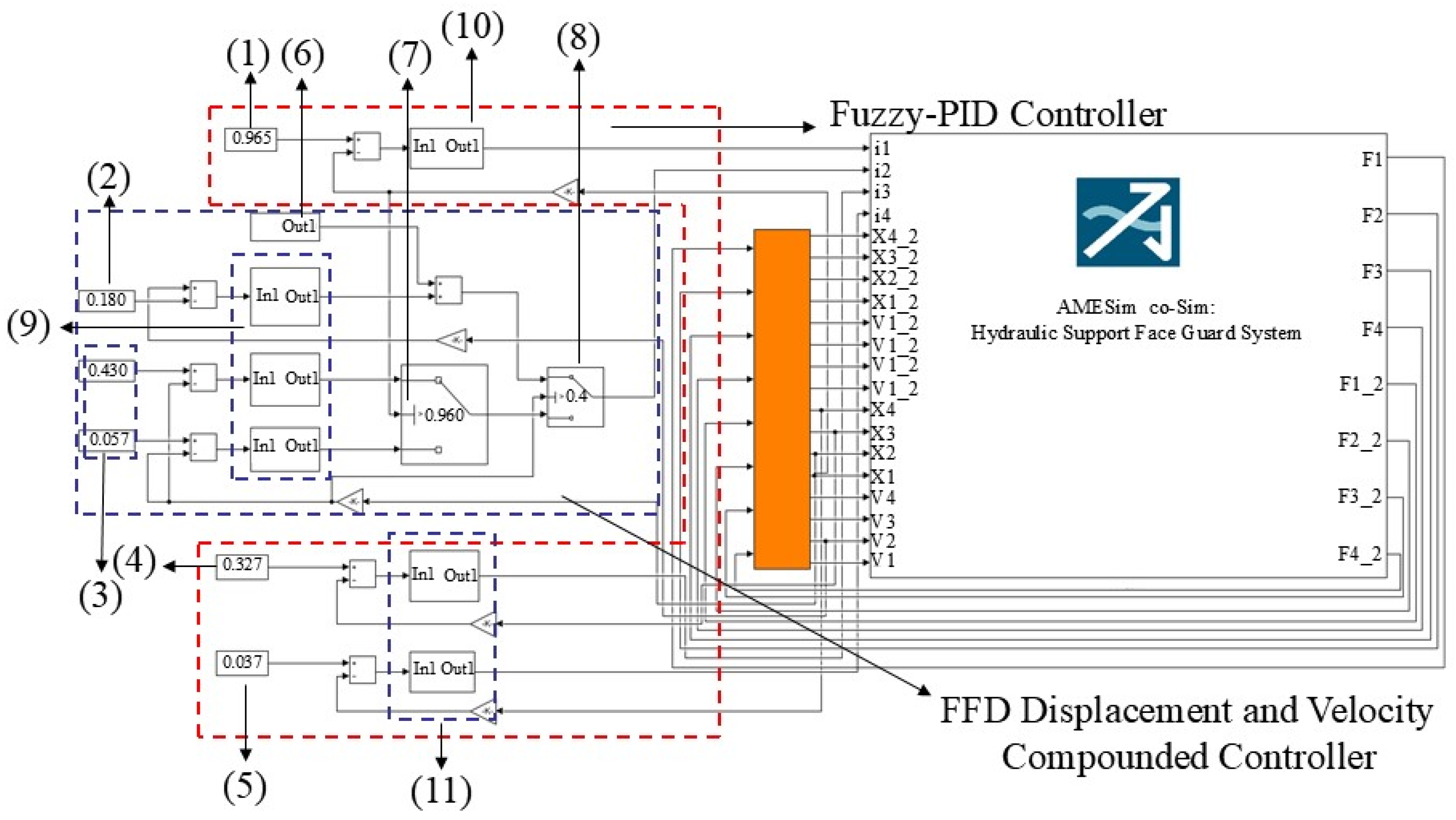
4.1. Unified Simulation Model
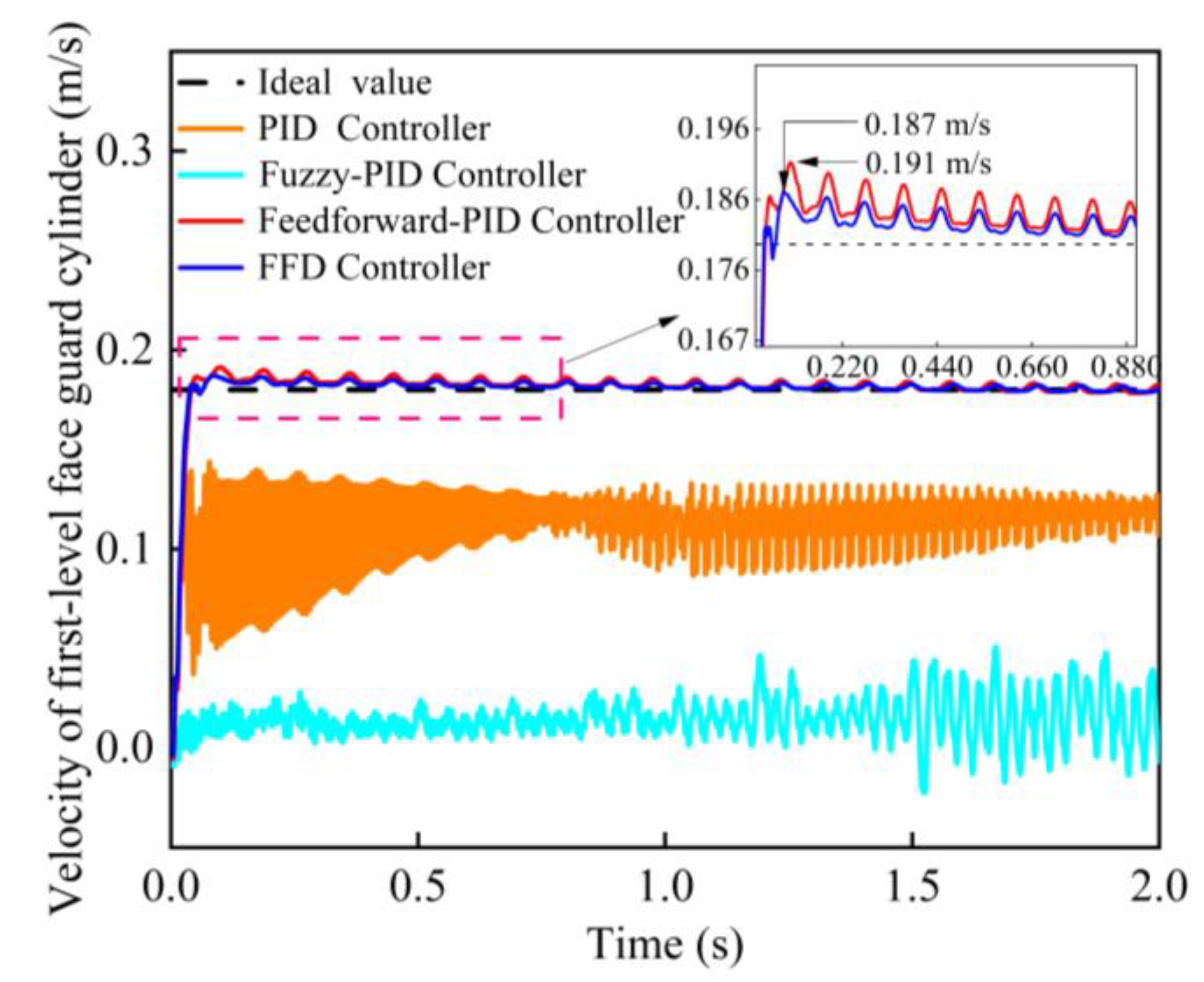
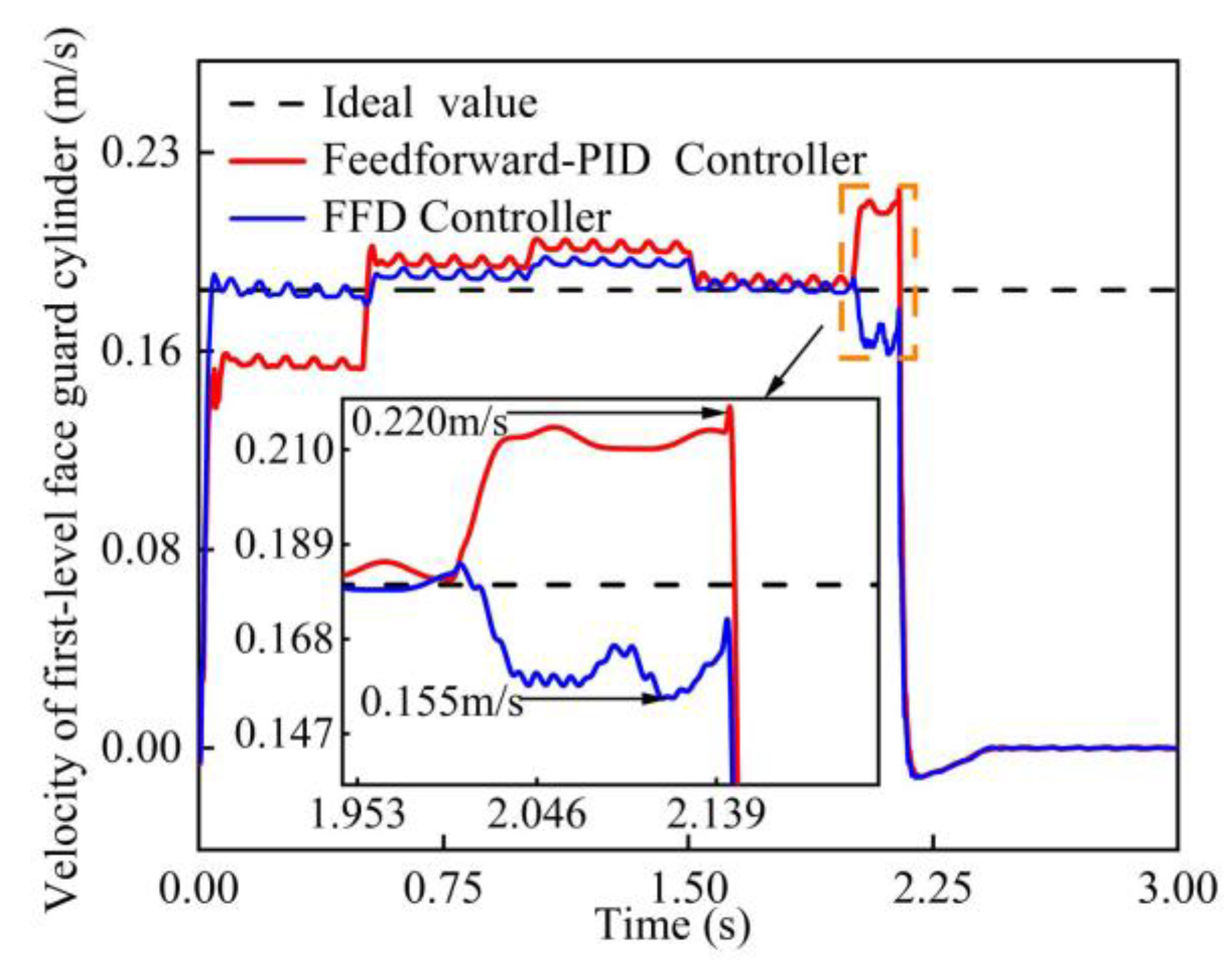
4.2. Controller Tracking Performance Testing
4.3. Controller Disturbance Rejection Performance Test
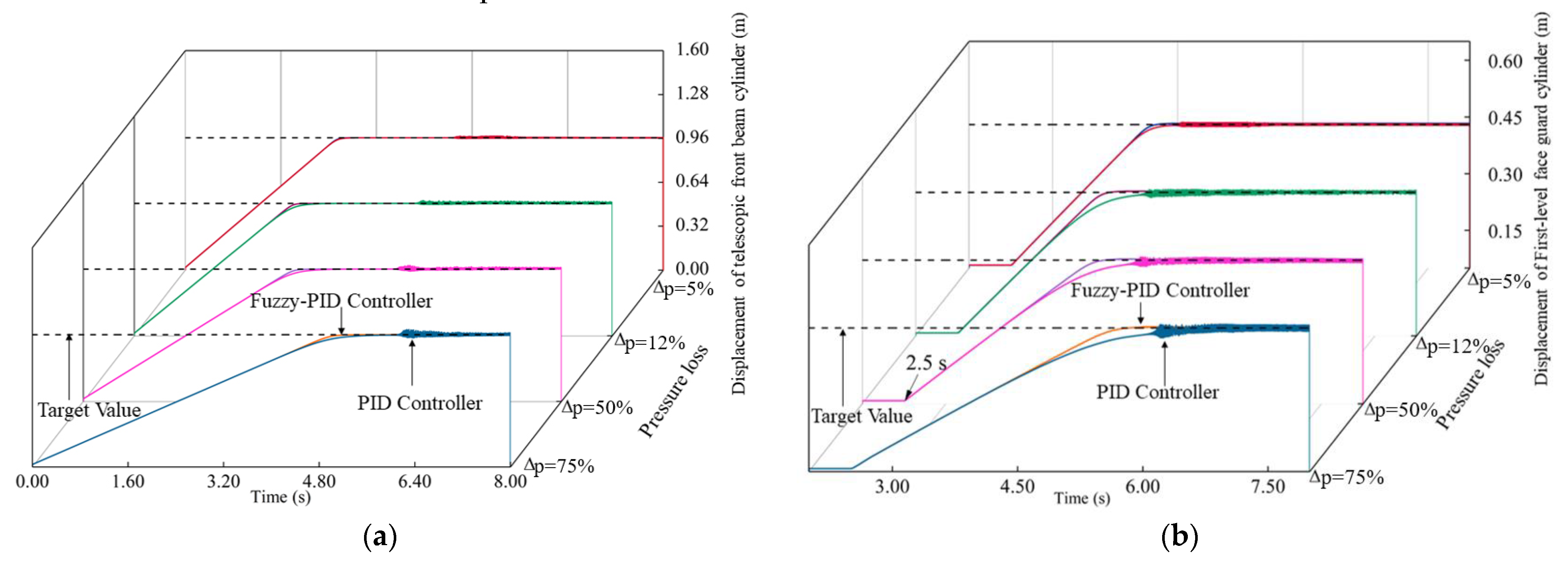
4.4. Influence of Pressure Loss on the Performance of the Controller
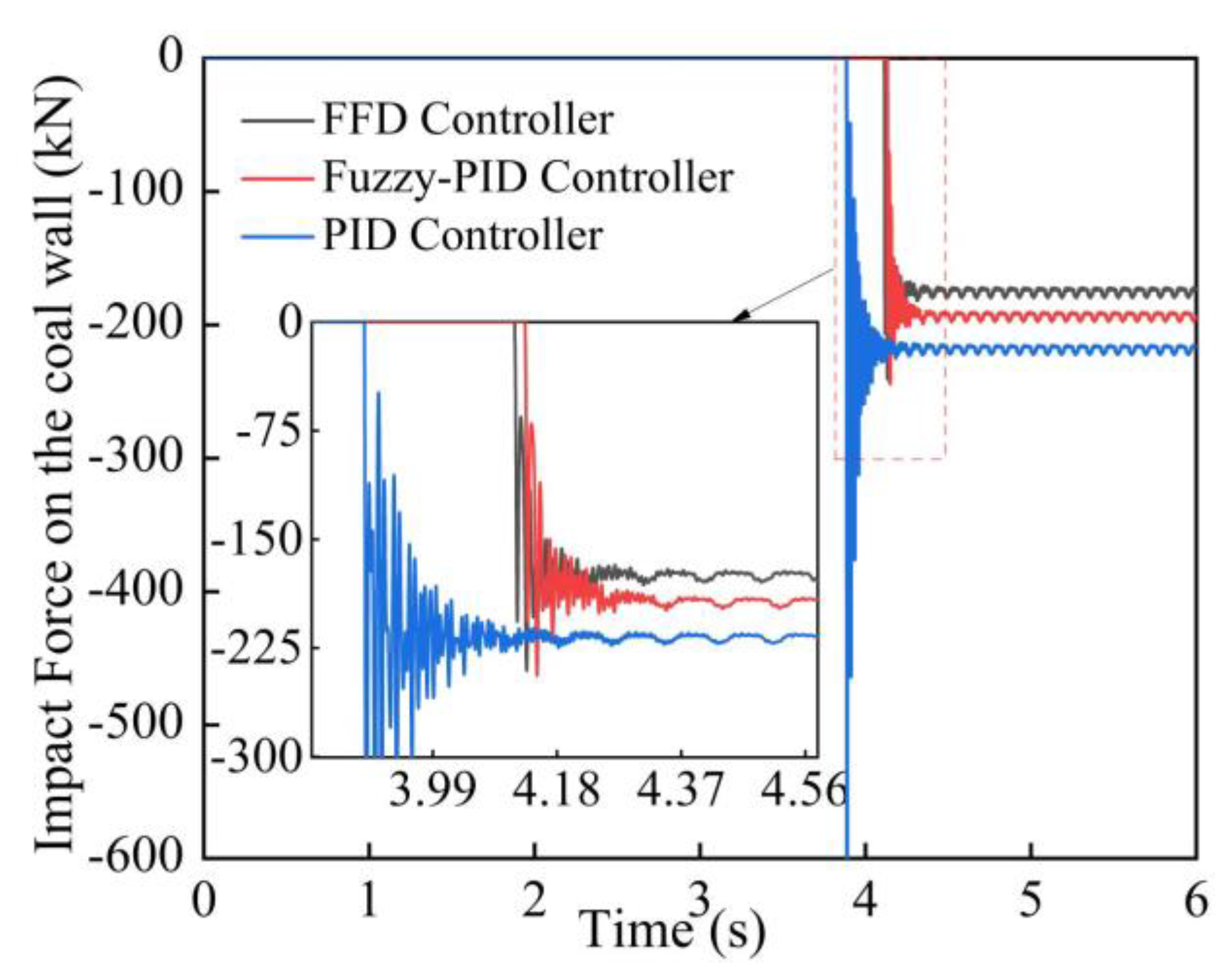
4.5. Analysis of the Coal Wall’s Response to Impact
5. Conclusions
- (1)
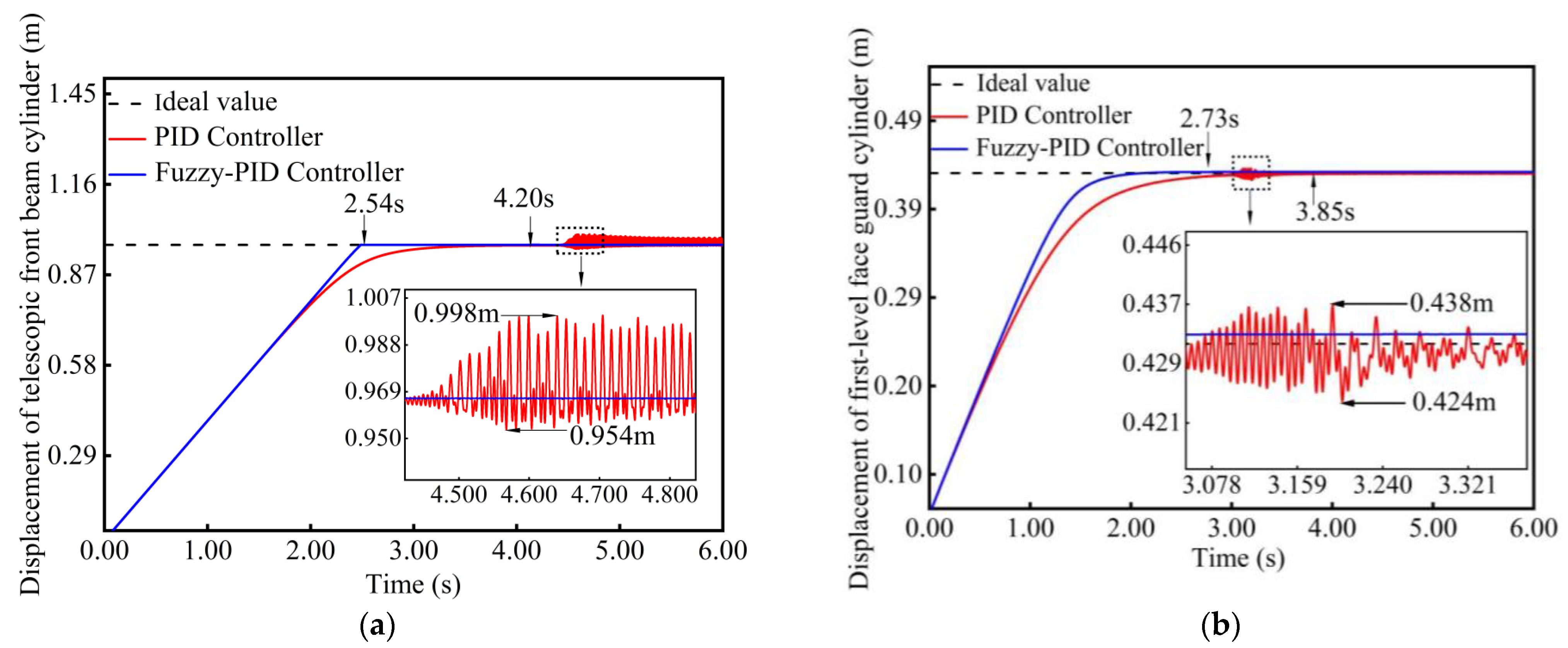
- During the hydraulic support guard process, the fuzzy PID controller demonstrates better robustness than the PID controller when input pressure is lost. Moreover, the fuzzy PID controller exhibits stronger resistance to disturbances and faster response speed in addressing step targets, making it suitable as a displacement controller for the support. However, neither the fuzzy PID controller nor the PID controller can achieve target speed tracking. The fuzzy PID controller requires the introduction of feedforward compensation to correct errors and achieve speed tracking. The test results indicate that the FFD displacement speed compound controller has more advantages in responding to speed step signals than the fuzzy PID and PID controllers. Since the FFD displacement speed compound controller can track the target speed, it can be used as the velocity controller for the support.
- (2)
- The combined simulation can replicate the working characteristics of the support structure and output the physical features of the mechanical coupling system under the controller. When using the PID controller to control the support movement, the maximum impact response on the coal wall reached up to 600 kN, ultimately stabilizing at approximately 240 kN. When employing the fuzzy PID controller, the maximum impact response on the coal wall reaches 250 kN, ultimately stabilizing at approximately 200 kN. Moreover, with the FFD displacement speed compound controller, the maximum impact response on the coal wall was reduced to 250 kN, stabilizing at 170 kN. These values represent a reduction of 58% from the highest impact response and a minimum reduction of 15%. The results demonstrated that the FFD displacement speed compound controller can mitigate the impact of coal wall response by controlling the approach speed of the support plate.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Li, Z. Forecasting of Coal Demand in China Based on Support Vector Machine Optimized by the Improved Gravitational Search Algorithm. Energies 2019, 12, 2249. [Google Scholar] [CrossRef]
- Sears, M.M.; Rusnak, J.; Van Dyke, M.; Rashed, G.; Mohamed, K.; Sloan, M. Coal Rib Response during Bench Mining: A Case Study. Int. J. Min. Sci. Technol. 2018, 28, 107–113. [Google Scholar] [CrossRef]
- Singh, S.K.; Agrawal, H.; Singh, A.P. Rib Stability: A Way Forward for Safe Coal Extraction in India. Int. J. Min. Sci. Technol. 2017, 27, 1087–1091. [Google Scholar] [CrossRef]
- Mangal, A.; Paul, P.S. Rock Mechanical Investigation of Strata Loading Characteristics to Assess Caving and Requirement of Support Resistance in a Mechanized Powered Support Longwall Face. Int. J. Min. Sci. Technol. 2016, 26, 1081–1087. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.; Tang, Y.; Gong, H.; Xu, G. Failure Mechanisms and the Control of a Longwall Face with a Large Mining Height within a Shallow-Buried Coal Seam. Shock Vib. 2021, 2021, e8494913. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Q.; Zhang, J.; Liu, H.; Zhu, G.; Wang, Y. Study on the Controller Factors Associated with Roof Falling and Ribs Spalling in Deep Mine with Great Mining Height and Compound Roof. Eng. Fail. Anal. 2021, 129, 105723. [Google Scholar] [CrossRef]
- Lei, W.; Li, X.; Du, W.; Zhang, J.; Zhang, J.; Shang, F.; Xu, T. Research on Mechanism and Prevention Technology of Rib Spalling in Fully-Mechanized Coal Mining Face with Soft and Unstable Seam. IOP Conf. Ser. Earth Environ. Sci. 2019, 252, 052065. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Shen, W.; Zeng, Q.; Chen, P.; Qin, Q.; Li, Z. Research on the Mechanism and Control Technology of Coal Wall Sloughing in the Ultra-Large Mining Height Working Face. Int. J. Environ. Res. Public Health 2023, 20, 868. [Google Scholar] [CrossRef]
- Bai, Q.-S.; Tu, S.-H.; Chen, M.; Zhang, C. Numerical Modeling of Coal Wall Spall in a Longwall Face. Int. J. Rock Mech. Min. Sci. 2016, 88, 242–253. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Y.; Han, Z.; Liu, Q.; Luo, Z.; Cheng, W.; Zhang, H.; Qiu, S.; Wang, H. Coal Wall Spalling Mechanism and Grouting Reinforcement Technology of Large Mining Height Working Face. Sensors 2022, 22, 8675. [Google Scholar] [CrossRef]
- Cui, F.; Zhang, T.; Cheng, X. Research on Control of Rib Spalling Disaster in the Three-Soft Coal Seam. Shock Vib. 2021, 2021, 2404218. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, A.K.; Mishra, A.K.; Singh, R. Underground Mining of Thick Coal Seams. Int. J. Min. Sci. Technol. 2015, 25, 885–896. [Google Scholar] [CrossRef]
- Verma, A.K.; Deb, D. Numerical Analysis of an Interaction between Hydraulic-Powered Support and Surrounding Rock Strata. Int. J. Geomech. 2013, 13, 181–192. [Google Scholar] [CrossRef]
- Wan, L.; Zhang, S.; Meng, Z.; Xie, Y. Analysis of the Protection Performance of Face Guard for Large Mining Height Hydraulic Support. Shock Vib. 2021, 2021, 6631017. [Google Scholar] [CrossRef]
- Xu, Y.X.; Wang, G.F.; Li, M.Z.; Xu, Y.J.; Han, H.J.; Zhang, J.H. Investigation on coal face slabbed spalling features and reasonable control at the longwall face with super large cutting height and longwall top coal caving method. J. China Coal Soc. 2021, 46, 357–369. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, G.; Li, M.; Xu, Y.; Zhou, C.; Zhang, J. Mechanism of slabbed spalling failure of the coal face in fully mechanized caving face with super large cutting height. J. Min. Saf. Eng. 2021, 38, 19–30. [Google Scholar] [CrossRef]
- Dong, S. Characteristics and Stability Control of Coal Rib Spalling in Large Mining Height Working Face. China Mine Eng. Ing 2023, 52, 50–54. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, J.; Wang, H.; Ding, H. Output Feedback Control for the Driving Cylinder of Hydraulic Support with Error Constraint. J. Vib. Control 2023, 29, 3126–3136. [Google Scholar] [CrossRef]
- Ma, T.; Guo, X.; Su, G.; Deng, H.; Yang, T. Research on Synchronous Control of Active Disturbance Rejection Position of Multiple Hydraulic Cylinders of Digging-Anchor-Support Robot. Sensors 2023, 23, 4092. [Google Scholar] [CrossRef]
- Wang, D.-Y.; Zhang, W.-C.; Zeng, X.-G. Investigation on a Semi-Active Hydraulic Damping Strut to Reduce Vehicle in Situ Shift Vibration. J. Vib. Control 2020, 26, 3–18. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, B.; Chen, P.; Yang, Y. A State Estimator-Based Nonlinear Predictive Control for a Fractional-Order Francis Hydraulic Turbine Governing System. J. Vib. Control 2020, 26, 1068–1080. [Google Scholar] [CrossRef]
- Gu, J.; Xue, X.; Yang, W.; Lu, G. A Hybrid Sliding Mode Controller Design for Vibration Suppression in a Hydraulic Suspension System with Vertical Load Disturbance. J. Vib. Control 2024, 30, 377–391. [Google Scholar] [CrossRef]
- Gu, J.; He, S.; Dai, J.; Wei, D.; Yan, H.; Tan, C.; Wang, Z.; Si, L. A Walking Trajectory Tracking Control Based on Uncertainties Estimation for a Drilling Robot for Rockburst Prevention. Machines 2024, 12, 298. [Google Scholar] [CrossRef]
- Wu, W.; Gong, G.; Chen, Y.; Zhou, X. Performance Analysis of Electro-Hydraulic Thrust System of TBM Based on Fuzzy PID Controller. Energies 2022, 15, 959. [Google Scholar] [CrossRef]
- Ren, H.; Zhang, D.; Gong, S.; Zhou, K.; Xi, C.; He, M.; Li, T. Dynamic Impact Experiment and Response Characteristics Analysis for 1:2 Reduced-Scale Model of Hydraulic Support. Int. J. Min. Sci. Technol. 2021, 31, 347–356. [Google Scholar] [CrossRef]
- Meng, Z.; Zeng, Q.; Wan, L. Pose Adjusting Simulation of Hydraulic Support Based on Mechanical-Electrical-Hydraulic Coordination. Teh. Vjesn. 2018, 25, 1110–1118. [Google Scholar] [CrossRef]
- Zhu, X.; Pan, L.; Sun, Z.; Wan, Y.; Huang, Y.; Choi, J.-H. Simulation Tool for Dozer Data Acquisition. Autom. Constr. 2022, 142, 104522. [Google Scholar] [CrossRef]
- Chen, Z.; Fei-Xiang, X.; De-Qiang, C. A Multi-Objective Optimization Method for Hydraulically Interconnected Suspension System. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2024, 238, 1234–1248. [Google Scholar] [CrossRef]
- Wang, W.; Du, D.; Wu, R.; Yuan, C.; Chang, B. Co-Simulation Research of the Balancing Control of the Moving Beam of a Heavy Hydraulic Press During the Die Forging Process. In Proceedings of the ASME 2017 12th International Manufacturing Science and Engineering Conference, Los Angeles, CA, USA, 4–8 June 2017. [Google Scholar]
- Ziyu, S.; Xiaona, W.; Yajing, L.; Yu, G.; Huimin, H.; Jiahai, H. Co-Simulation Model Coupling of Flexible Rope Hoisting System and Hydraulic Braking System for a Mine Hoist. Proc. Inst. Mech. Eng. Part E J. Process. Mech. Eng. 2022, 236, 881–893. [Google Scholar] [CrossRef]
- Ananthamoorthy, N.P.; Baskaran, K. High Performance Hybrid Fuzzy PID Controller for Permanent Magnet Synchronous Motor Drive with Minimum Rule Base. J. Vib. Control 2015, 21, 181–194. [Google Scholar] [CrossRef]
- Jensen, K.J.; Ebbesen, M.K.; Hansen, M.R. Adaptive Feedforward Control of a Pressure Compensated Differential Cylinder. Appl. Sci. 2020, 10, 7847. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
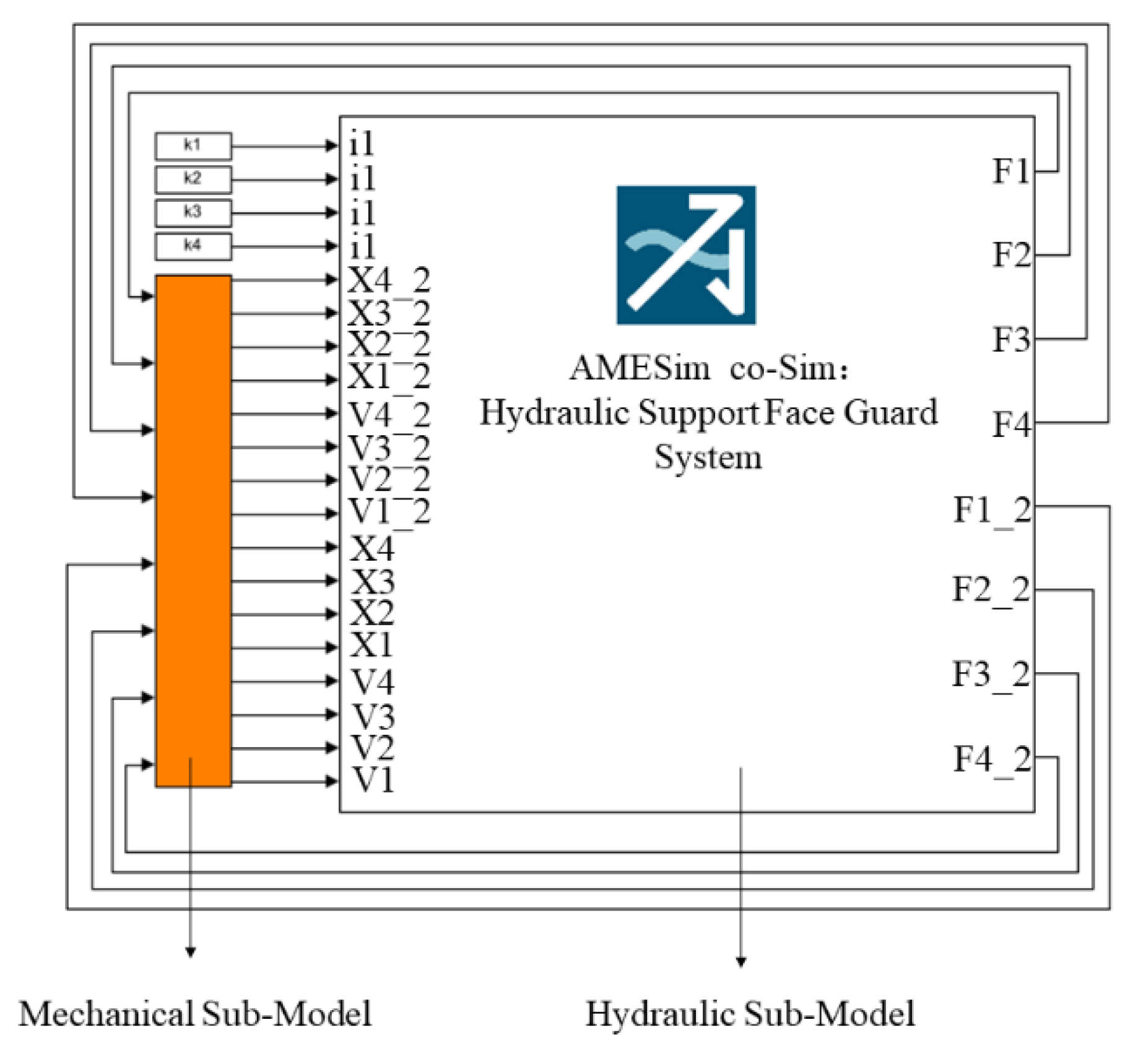
| Signals | Mark | Interpretation |
|---|---|---|
| Input signals | i1 | Input signal of the hydraulic servo valve of the telescopic front beam hydraulic system |
| i2 | Input signal of the hydraulic servo valve of the first-level face guard plate hydraulic system | |
| i3 | Input signal of the hydraulic servo valve of the second-level face guard plate hydraulic system | |
| i4 | Input signal of the hydraulic servo valve of the third-level face guard plate hydraulic system | |
| X4_2 | Left third-level face guard hydraulic cylinder displacement signal | |
| X3_2 | Left second-level face guard hydraulic cylinder displacement signal | |
| X2_2 | Left first-level face guard hydraulic cylinder displacement signal | |
| X1_2 | Left telescopic beam hydraulic cylinder displacement signal | |
| V4_2 | Left third-level face guard hydraulic cylinder velocity signal | |
| V3_2 | Left second-level face guard hydraulic cylinder velocity signal | |
| V2_2 | Left first-level face guard hydraulic cylinder velocity signal | |
| V1_2 | Left telescopic beam hydraulic cylinder velocity signal | |
| X4 | Right third-level face guard hydraulic cylinder displacement signal | |
| X3 | Right second-level face guard hydraulic cylinder displacement signal | |
| X2 | Right first-level face guard hydraulic cylinder displacement signal | |
| X1 | Right telescopic beam hydraulic cylinder displacement signal | |
| V4 | Right third-level face guard hydraulic cylinder velocity signal | |
| V3 | Right second-level face guard hydraulic cylinder velocity signal | |
| V2 | Right first-level face guard hydraulic cylinder velocity signal | |
| V1 | Right telescopic beam hydraulic cylinder velocity signal | |
| Output signal | F1 | Right telescopic beam hydraulic cylinder force signal |
| F2 | Right first-level face guard hydraulic cylinder force signal | |
| F3 | Right second-level face guard hydraulic cylinder force signal | |
| F4 | Right third-level face guard hydraulic cylinder force signal | |
| F1_2 | Left telescopic beam hydraulic cylinder force signal | |
| F2_2 | Left first-level face guard hydraulic cylinder force signal | |
| F3_2 | Left second-level face guard hydraulic cylinder force signal | |
| F4_2 | Left third-level face guard hydraulic cylinder force signal |
| Parameter | Value | Unit |
|---|---|---|
| Input signal of the hydraulic servo valve of the telescopic front beam hydraulic system | −40 | / |
| Input signal of the hydraulic servo valve of the first-level face guard plate hydraulic system | 0 | / |
| Input signal of the hydraulic servo valve of the second-level face guard plate hydraulic system | 0 | / |
| Input signal of the hydraulic servo valve of the third-level face guard plate hydraulic system | 0 | / |
| Weight of the telescopic front beam | 2089.496 | Kg |
| Weight of the first-level face guard panel | 875.417 | Kg |
| Weight of the second-level face guard panel | 759.671 | Kg |
| Weight of the third-level face guard panel | 351.670 | Kg |
| Stroke of the cylinder for the telescopic front beam | 0.947 | m |
| Stroke of the cylinder for the first-level face guard plate | 0.412 | m |
| Stroke of the cylinder for the second-level face guard plate | 0.313 | m |
| Stroke of the cylinder for the third-level face guard plate | 0.350 | m |
| Viscosity of the emulsion fluid | 50 | mPa·s |
| Density of the emulsion fluid | 0.89 | kg/L |
| Pressure of the pump station | 40 | Mpa |
| Nominal flow of the pump station | 500 | L/min |
| Characteristic flow rate at maximum opening of the directional valve | 100 | L/min |
| Rated current of the solenoid directional valve | 40 | mA |
| Rated pressure of the bidirectional lock | 35 | Mpa |
| Relief valve cracking pressure | 40 | Mpa |
| Relief valve flow rate pressure gradient | 500 | L/min/bar |
| Dimensional gain module | 0.001 | / |
| E | NB | NM | NS | Z | PS | PM | PB |
|---|---|---|---|---|---|---|---|
| EC | |||||||
| NB | NB/NB/PB | NB/NM/PS | NM/NB/Z | NM/NM/Z | NS/NM/Z | NS/Z/PB | Z/Z/PB |
| NM | NB/NB/NS | NB/NB/NS | NM/NM/NS | NB/NM/NS | NS/NS/Z | Z/Z/PS | Z/Z/PM |
| NS | NM/NM/NB | NM/NM/NB | NM/NS/NM | NS/NS/NS | Z/Z/Z | NS/PS/PS | NM/PS/PM |
| Z | NS/NM/NB | NS/NS/NM | NS/NS/NM | Z/Z/NS | NS/PS/Z | NM/PS/PS | NM/PM/PM |
| PS | NS/NS/NB | NS/NS/NM | Z/Z/NS | NS/PS/NS | NS/PS/Z | NM/PM/PS | NM/PM/PS |
| PM | Z/Z/NM | Z/Z/NS | NS/PS/NS | NM/PM/NS | NM/PM/Z | NM/PM/PS | NB/PB/PS |
| PB | Z/Z/PS | Z/Z/Z | NS/PS/Z | NM/PM/Z | NM/PN/Z | NB/PB/PB | NB/PB/PB |
| PID Controller | Fuzzy PID Controller | |||
|---|---|---|---|---|
| Adjusting Time/s | Oscillation Error/% | Adjusting Time/s | Oscillation Error/% | |
| 5% | 3.25 | −0.61 | 2.90 | 0.10 |
| 12% | 3.71 | 1.55 | 2.88 | 0.10 |
| 50% | 4.67 | 2.5 | 4.01 | 0.20 |
| 75% | 6.10 | 3.8 | 5.50 | 0.20 |
| PID Controller | Fuzzy PID Controller | |||
|---|---|---|---|---|
| Adjusting Time/s | Oscillation Error/% | Adjusting Time/s | Oscillation Error/% | |
| 5% | 4.73 | −1.1 | 4.55 | 0.60 |
| 12% | 4.79 | −2 | 4.56 | 0.69 |
| 50% | 5.79 | −3.7 | 5.60 | 0.70 |
| 75% | 6.79 | −6 | 6.12 | 0.69 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Q.; Hu, Y.; Meng, Z.; Wan, L. Research on Velocity Feedforward Control and Precise Damping Technology of a Hydraulic Support Face Guard System Based on Displacement Feedback. Machines 2024, 12, 676. https://doi.org/10.3390/machines12100676
Zeng Q, Hu Y, Meng Z, Wan L. Research on Velocity Feedforward Control and Precise Damping Technology of a Hydraulic Support Face Guard System Based on Displacement Feedback. Machines. 2024; 12(10):676. https://doi.org/10.3390/machines12100676
Chicago/Turabian StyleZeng, Qingliang, Yulong Hu, Zhaosheng Meng, and Lirong Wan. 2024. "Research on Velocity Feedforward Control and Precise Damping Technology of a Hydraulic Support Face Guard System Based on Displacement Feedback" Machines 12, no. 10: 676. https://doi.org/10.3390/machines12100676
APA StyleZeng, Q., Hu, Y., Meng, Z., & Wan, L. (2024). Research on Velocity Feedforward Control and Precise Damping Technology of a Hydraulic Support Face Guard System Based on Displacement Feedback. Machines, 12(10), 676. https://doi.org/10.3390/machines12100676