
Digital Twin-Driven Remaining Useful Life Prediction for Rolling Element Bearing



Abstract
:1. Introduction
2. Related Works
2.1. LSTM-Based RUL Prediction
2.2. DT-Based RUL Modeling
3. Hybrid Method Based on DT
3.1. DT
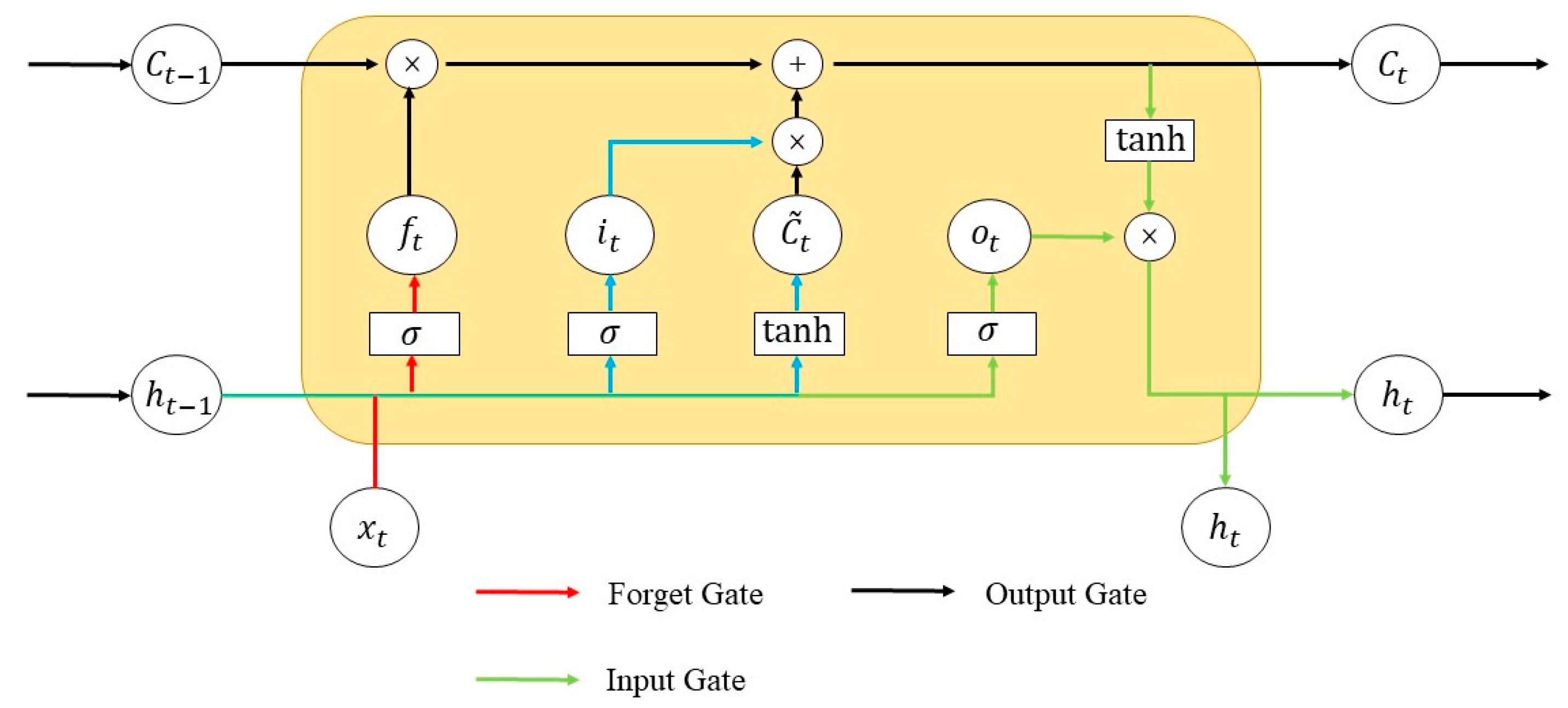
3.2. LSTM
3.3. Hybrid Method Base on DT
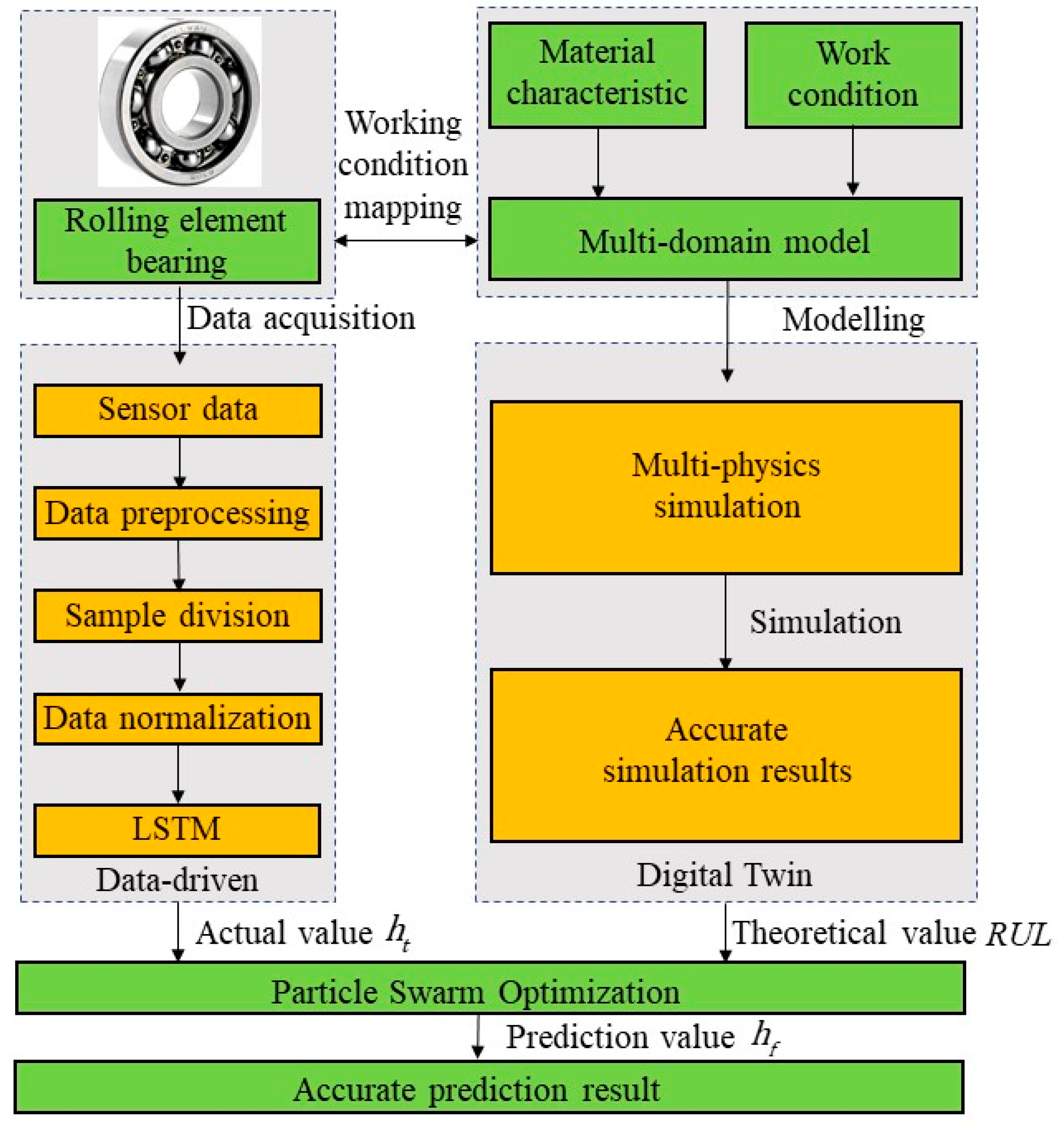
3.3.1. Framework
3.3.2. Implementation
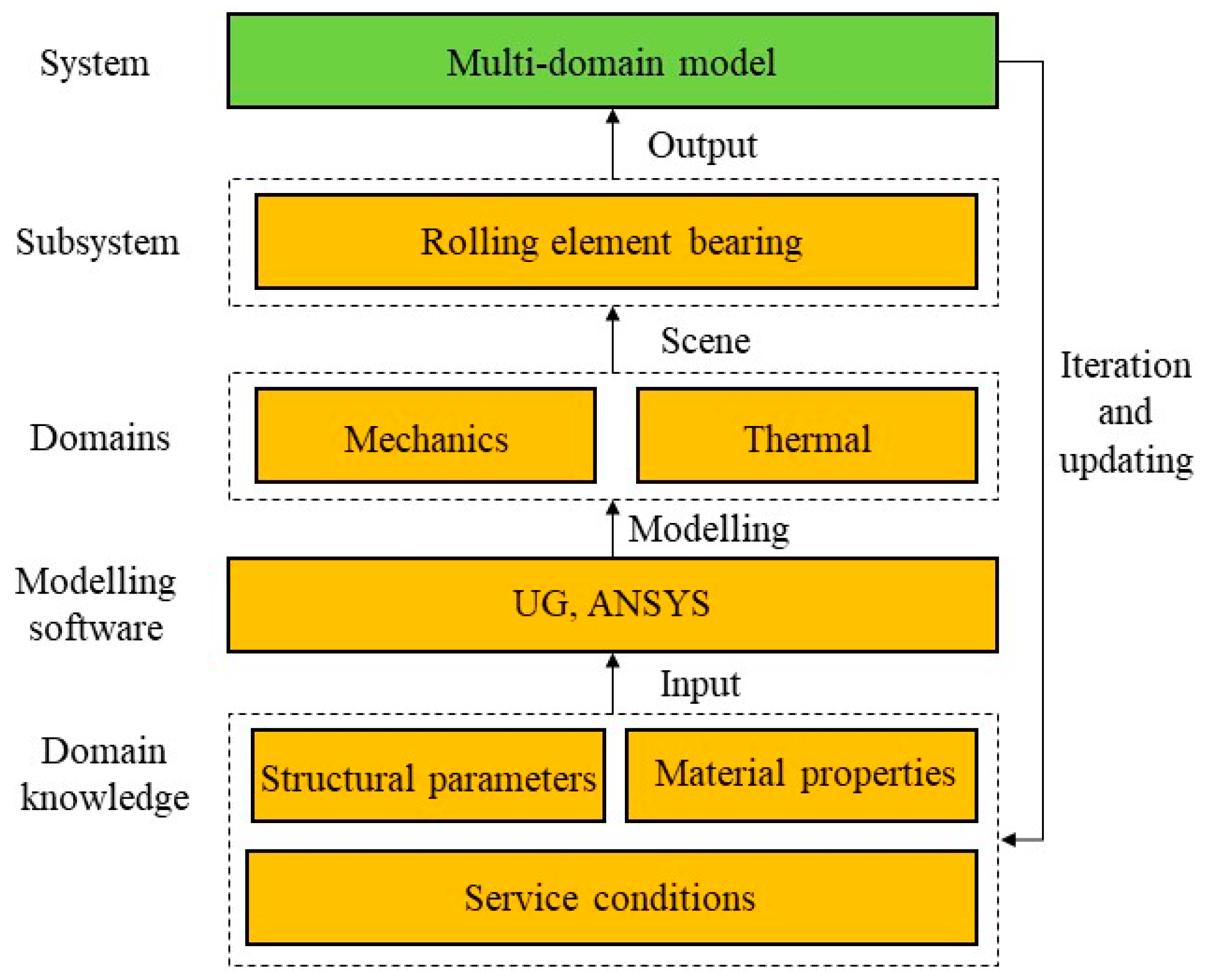
The Implementation of the DT Model
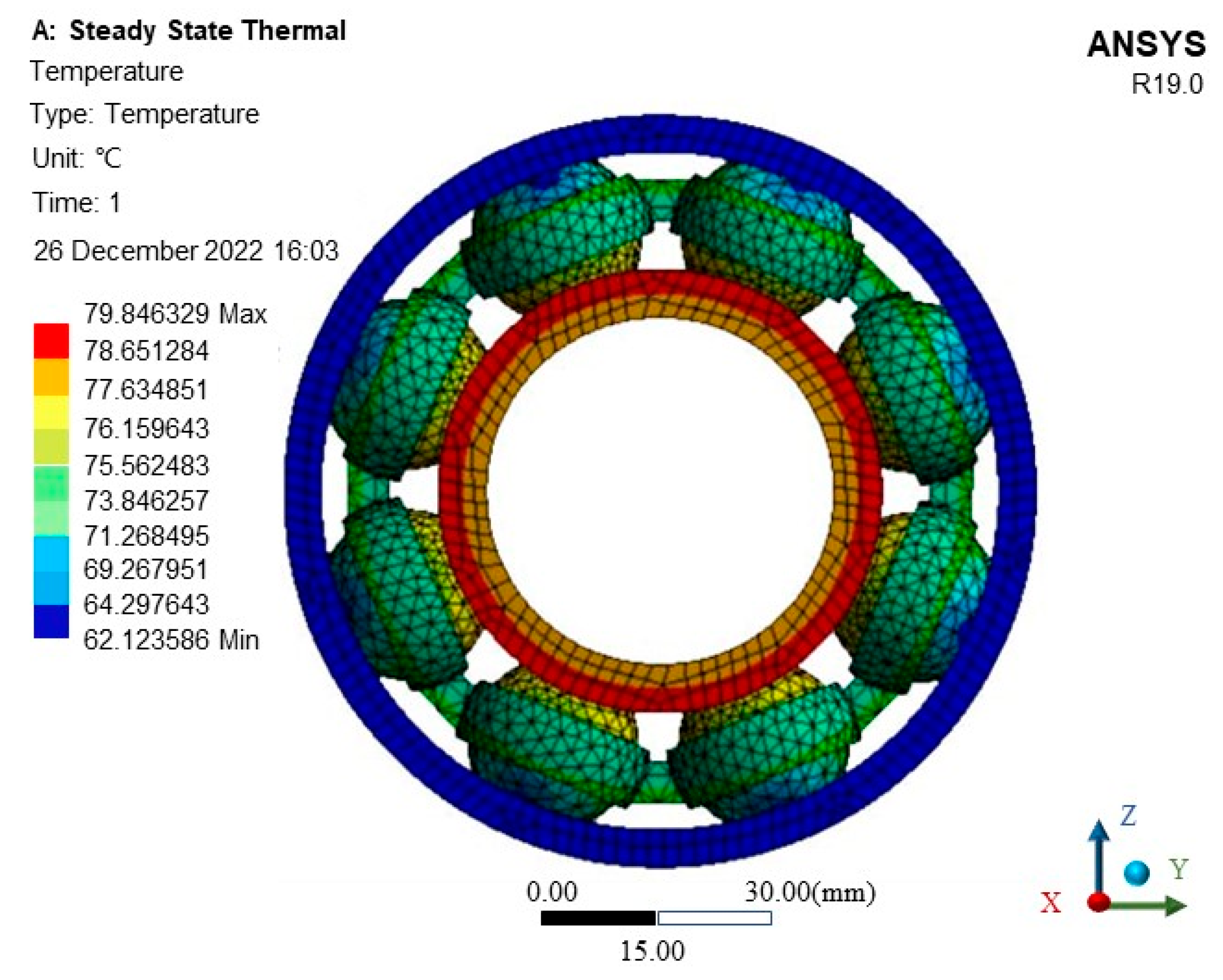
- (1)
- REB heat calculation
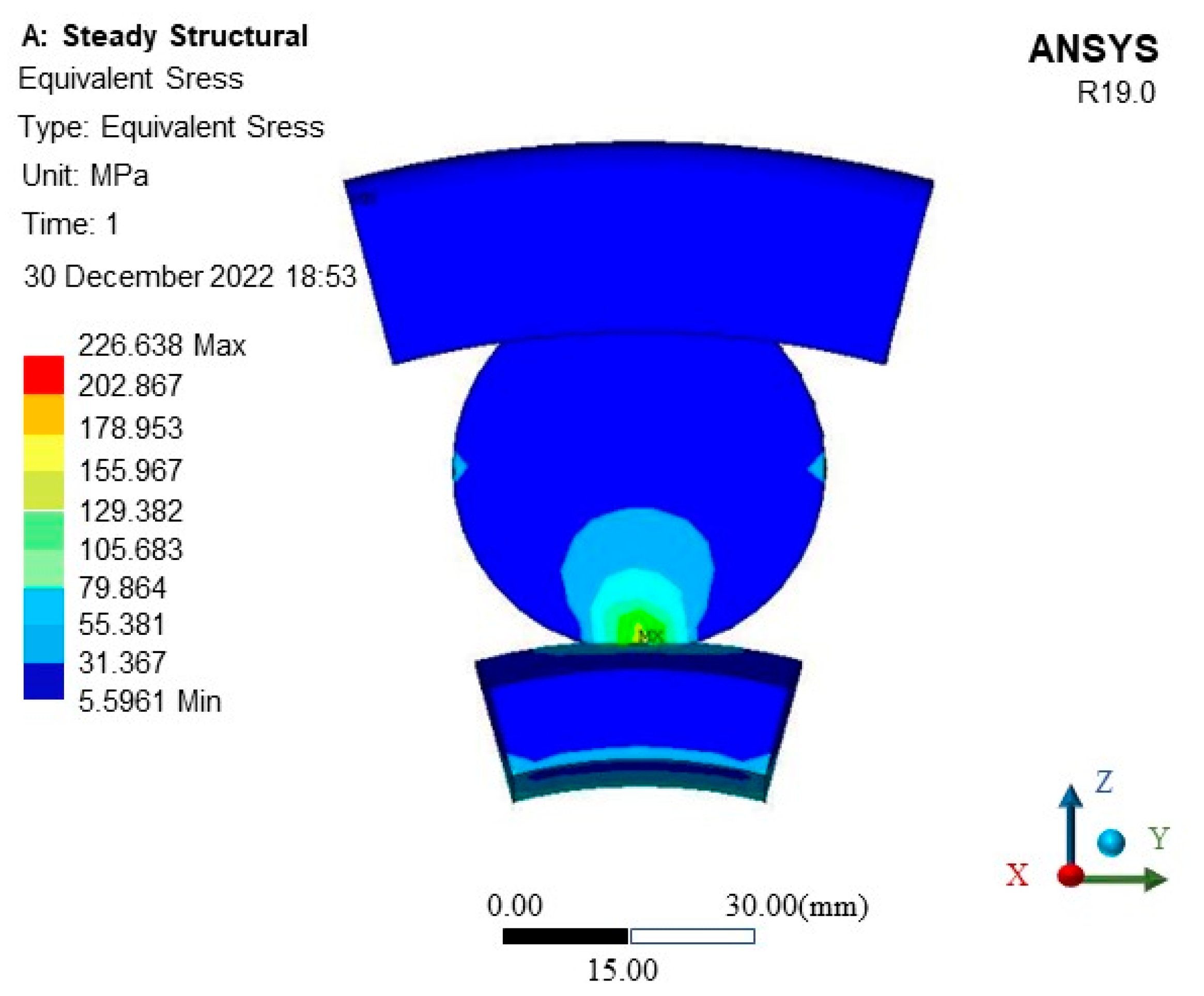
- (2)
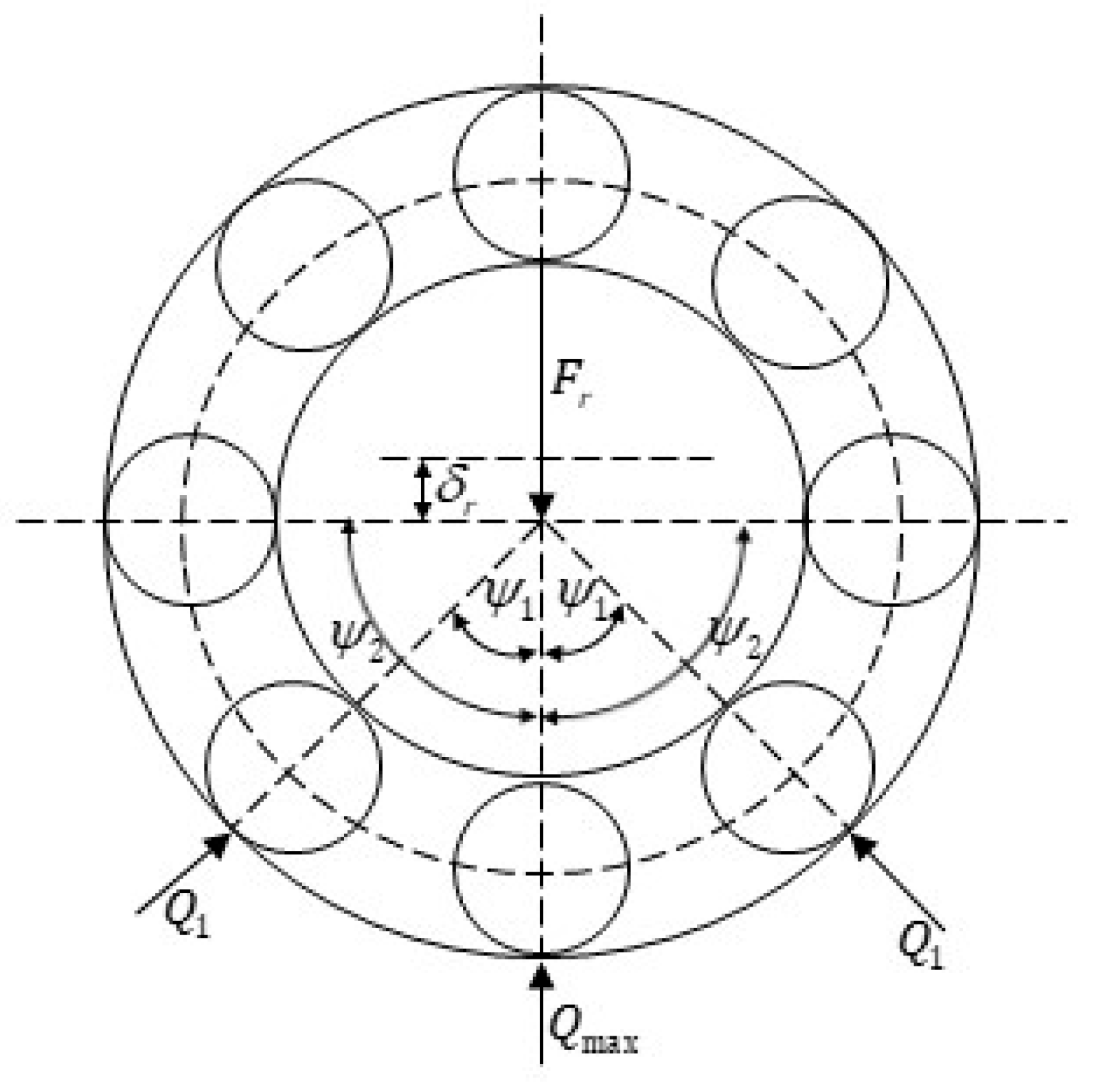
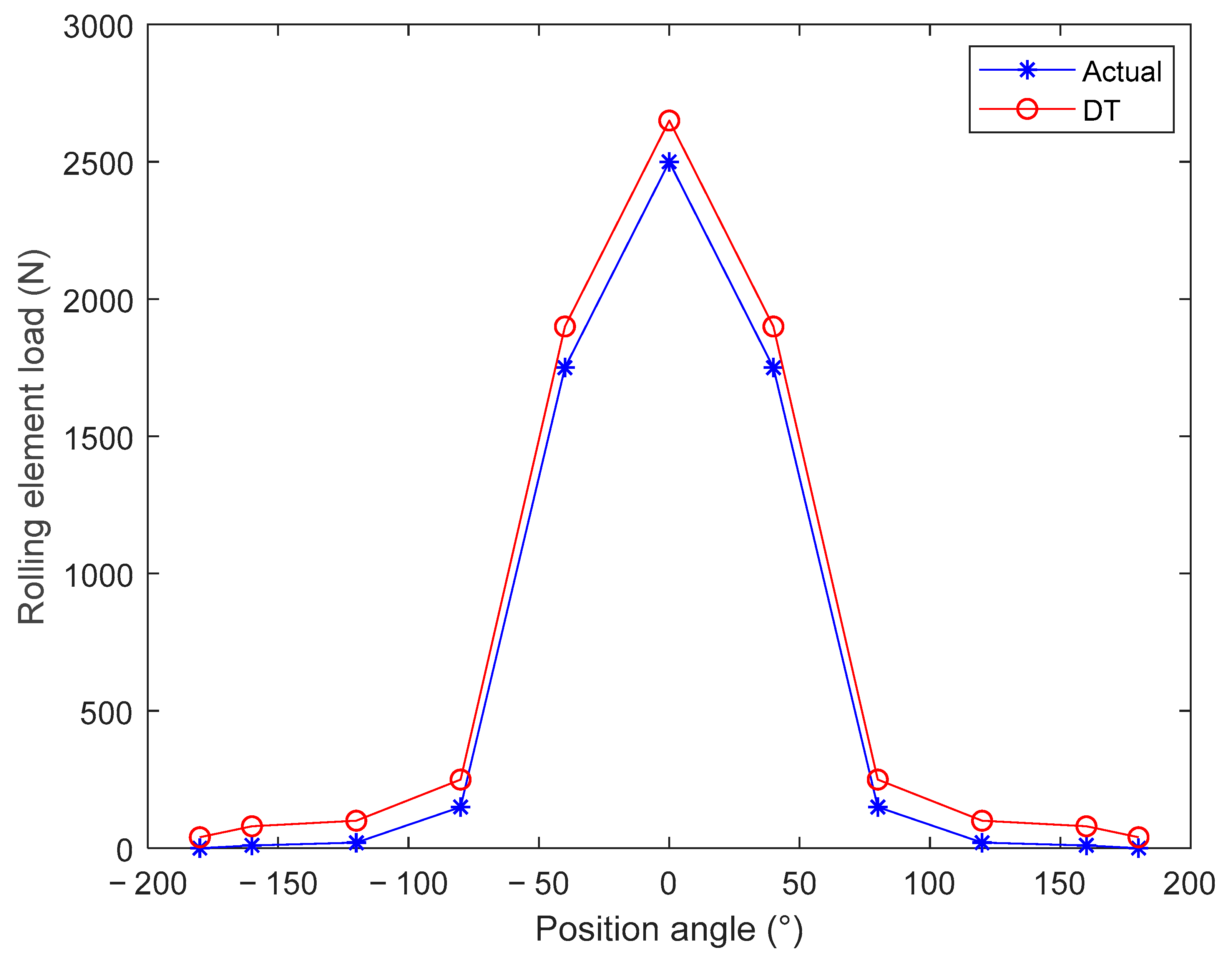
- REB load distribution
- (3)
- RUL mathematical model of REB
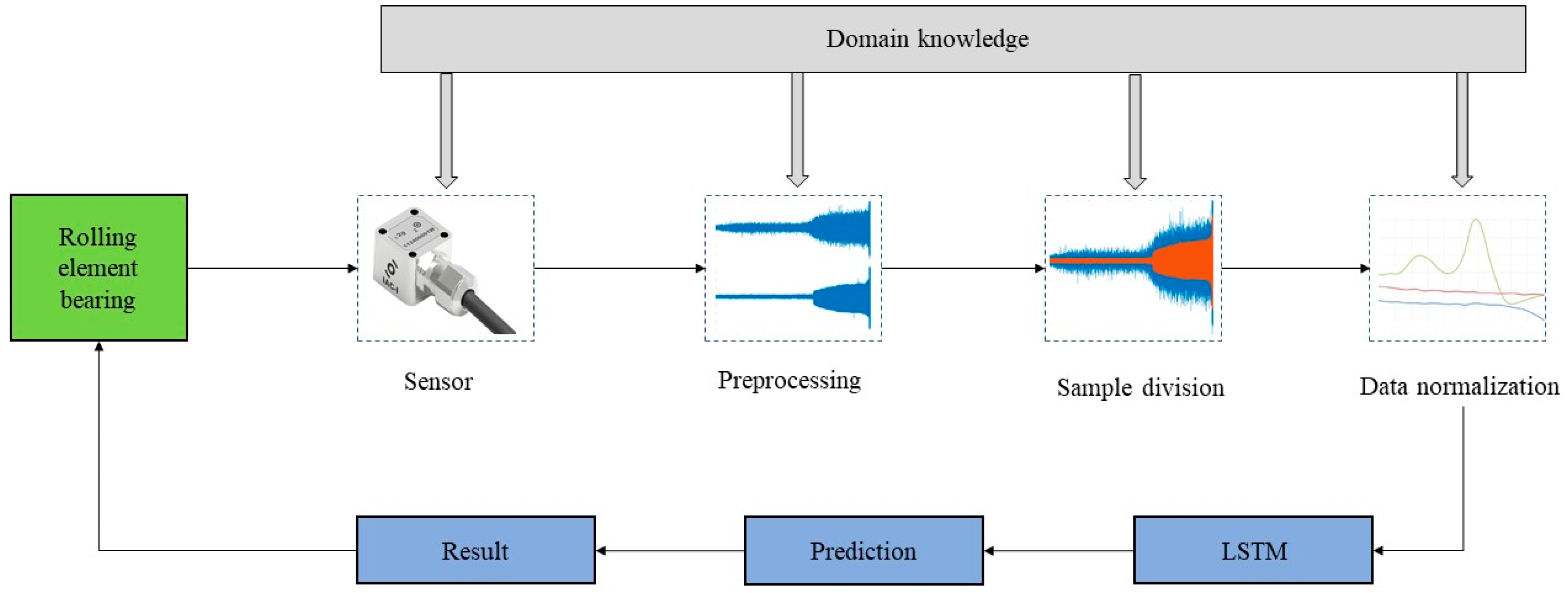
The Implementation of the LSTM Model
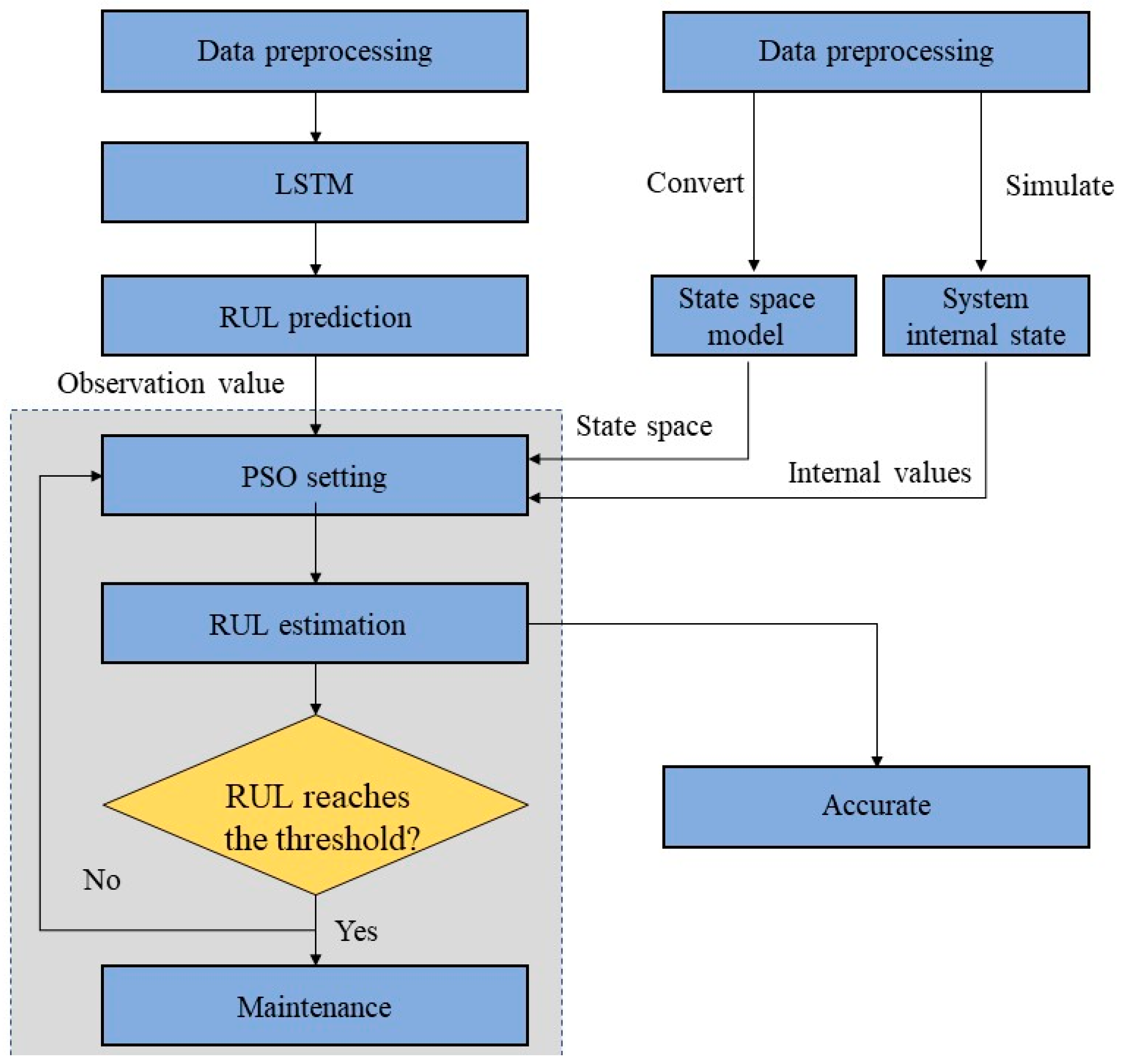
The Implementation of the Hybrid Method
- (1)
- Establish an LSTM model for the REB system and use the predicted RUL value obtained from the model as an observation value.
- (2)
- According to the RUL variation rules of the DT model, it is converted into an RUL space model for initialization based on the PSO algorithm, and the internal state of the system is calculated using model simulation.
- (3)
- Initialize the PSO algorithm based on the RUL space model and use the observed values to modify the theoretical values obtained from the system model simulation and reasoning. We can obtain more accurate RUL prediction values.
- (4)
- Judge whether the predicted value of the RUL reaches the threshold value based on the analysis results of the PSO algorithm. If the predicted value of the RUL reaches the threshold value, we should make appropriate maintenance. Otherwise, return to (2) to repeat the iteration.
The Hybrid Method in the PHM System
4. Case Study
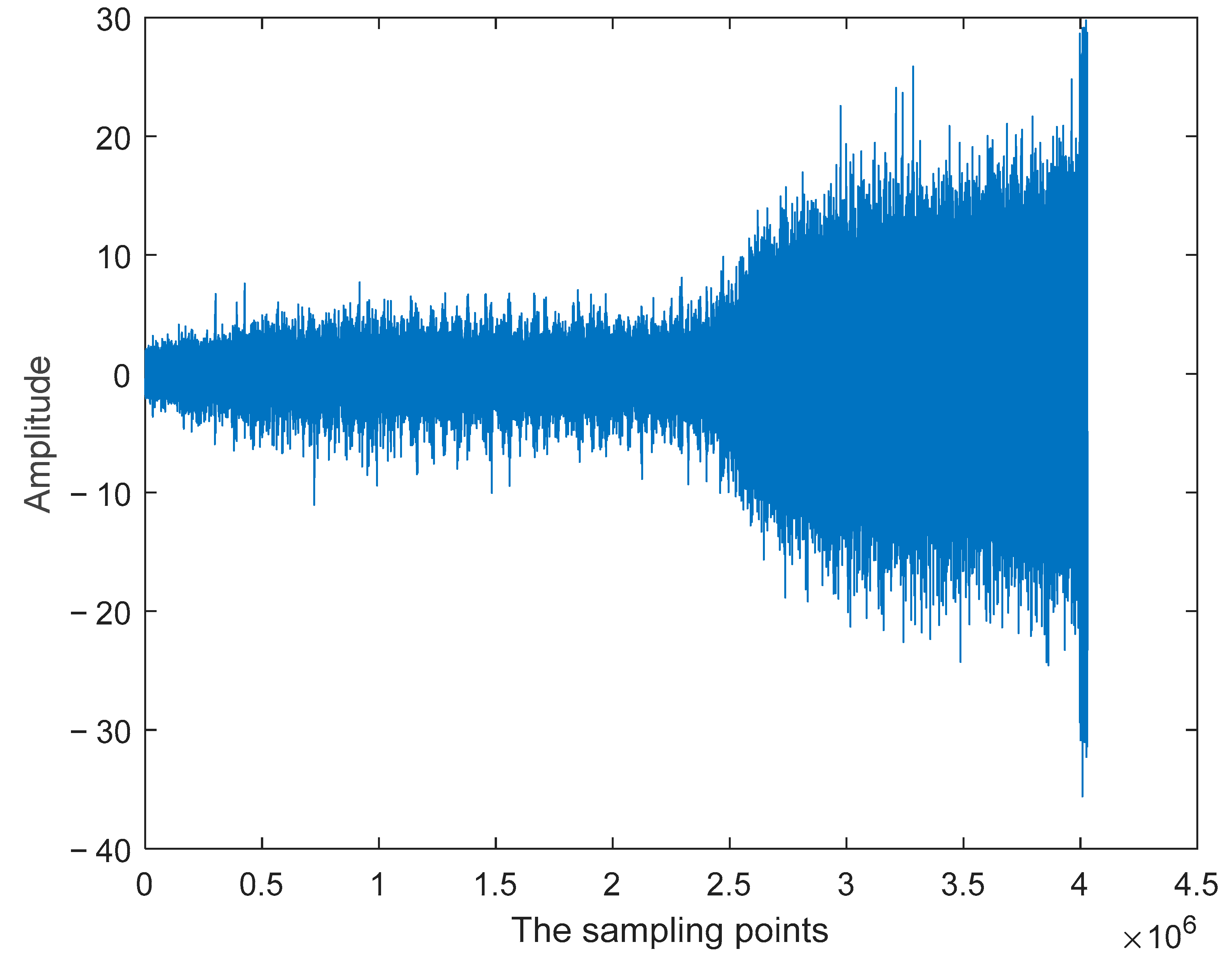
4.1. Experiment Platform and Database
4.2. DT-Based Hybrid RUL Prediction Approach for REB
4.2.1. The Realization of the DT Model
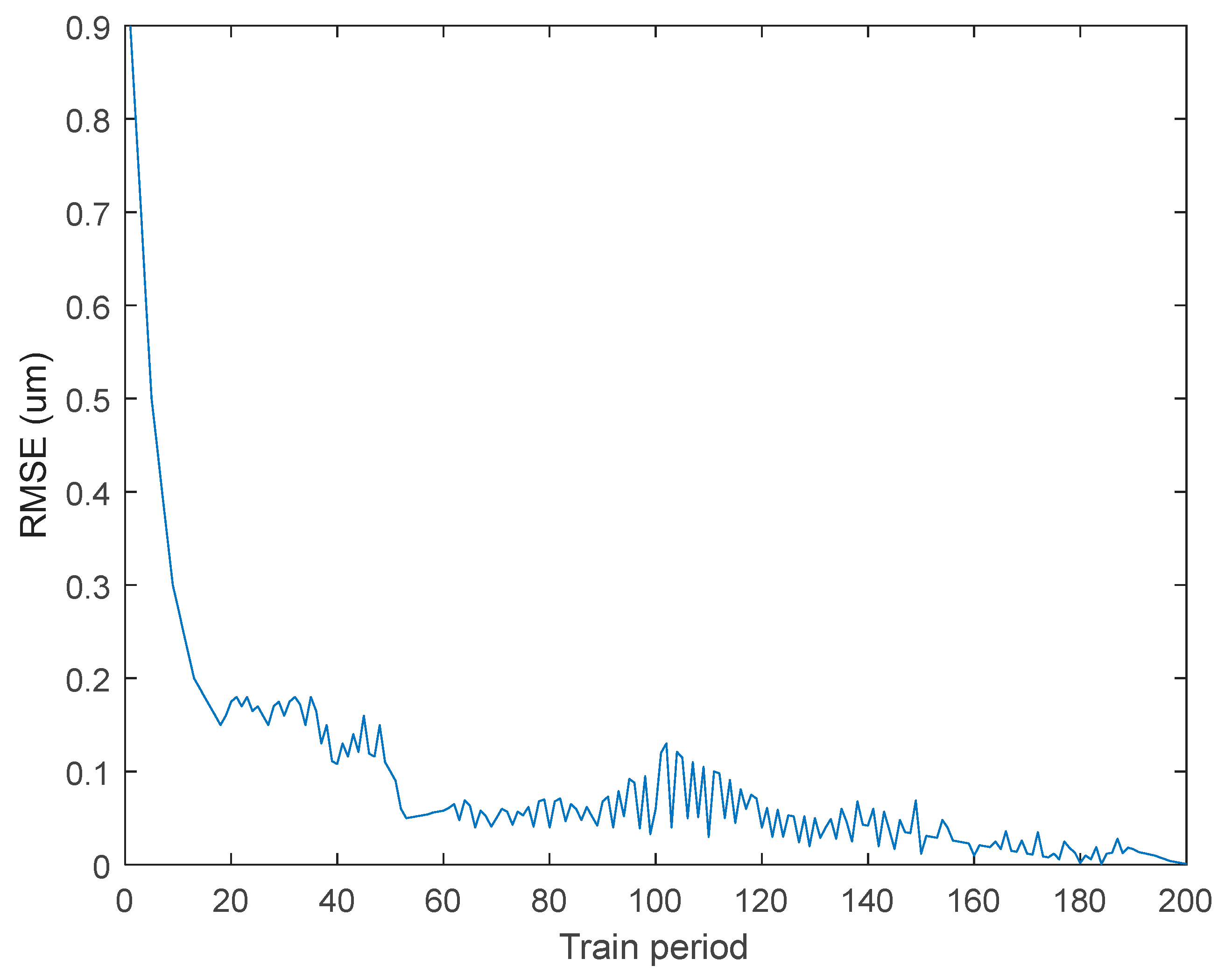
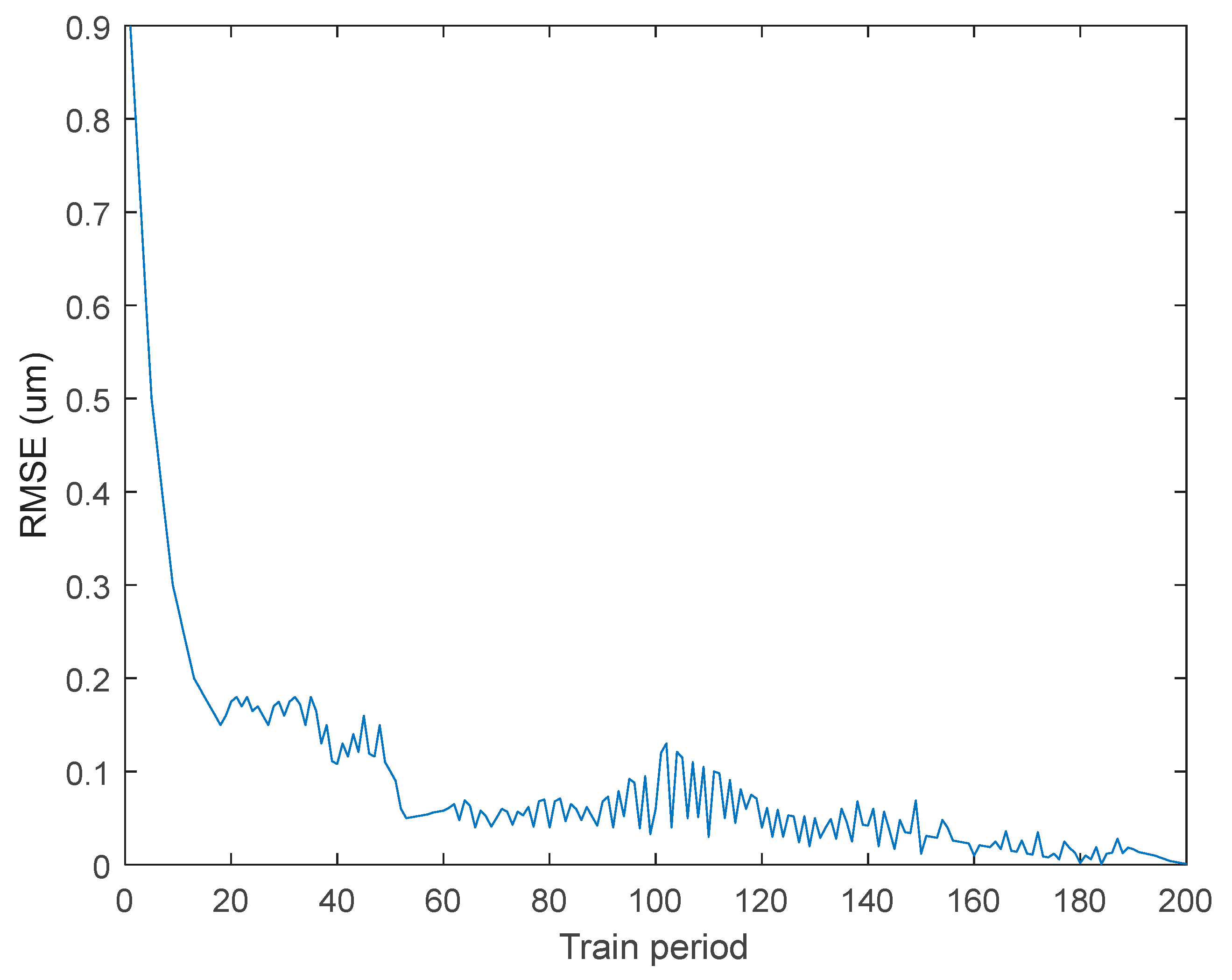
4.2.2. The Realization of the LSTM Model
4.2.3. The Realization of the Hybrid Method
| Algorithm 1: The Hybrid Method for the RUL Prediction of REB |
| Input: The theoretical prediction value of DT and the actual prediction value of LSTM Output: The particles prediction value (1) Initialize the parameters and particles (2) (3) for 1 = 1:150 (4) Sample from (2) (5) Calculate the RUL prediction value of particles by (3) (6) Calculate the weight of each particle end (7) Normalize the weight (8) Resample according to the normalized weight (9) Output the RUL prediction value of REB |
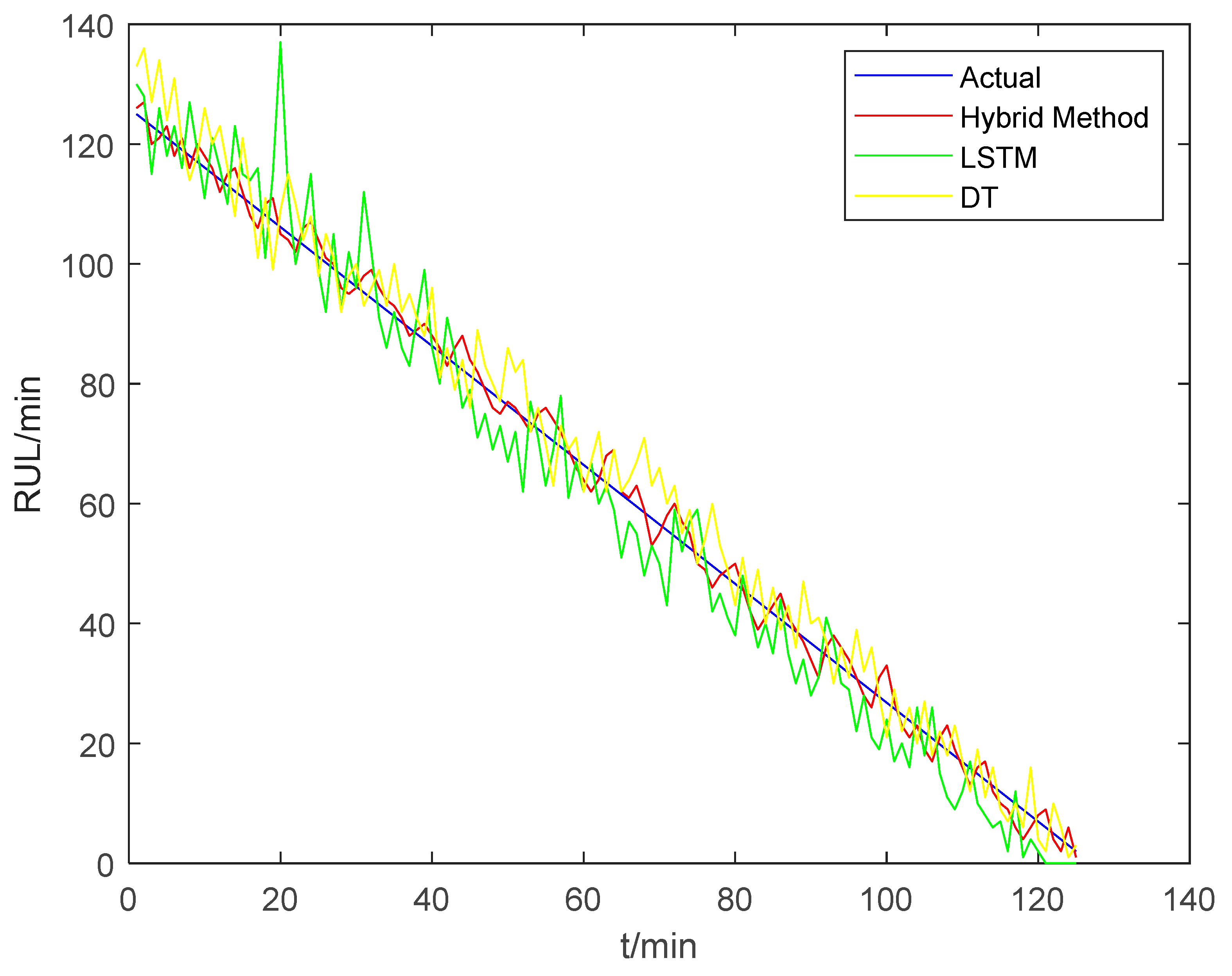
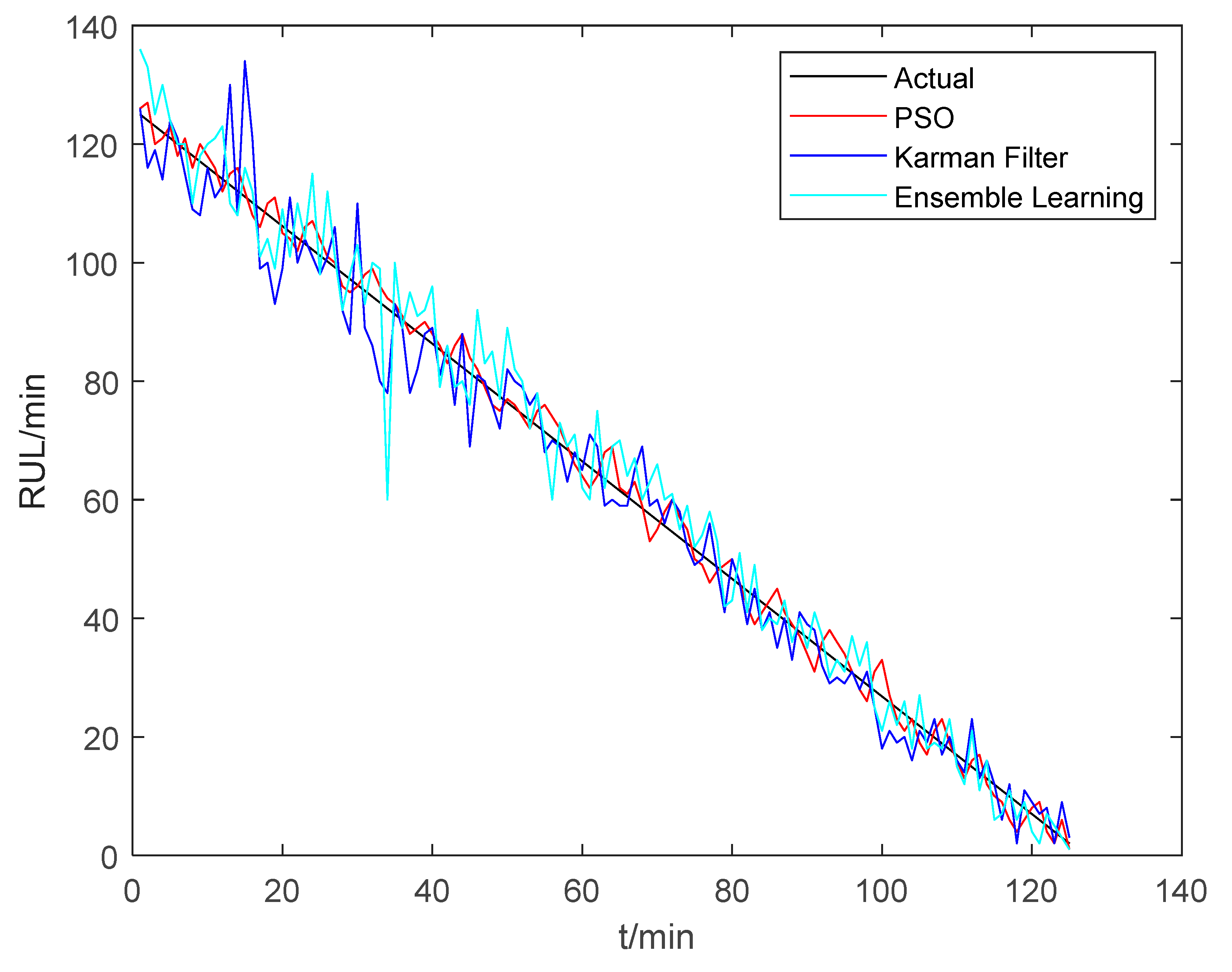
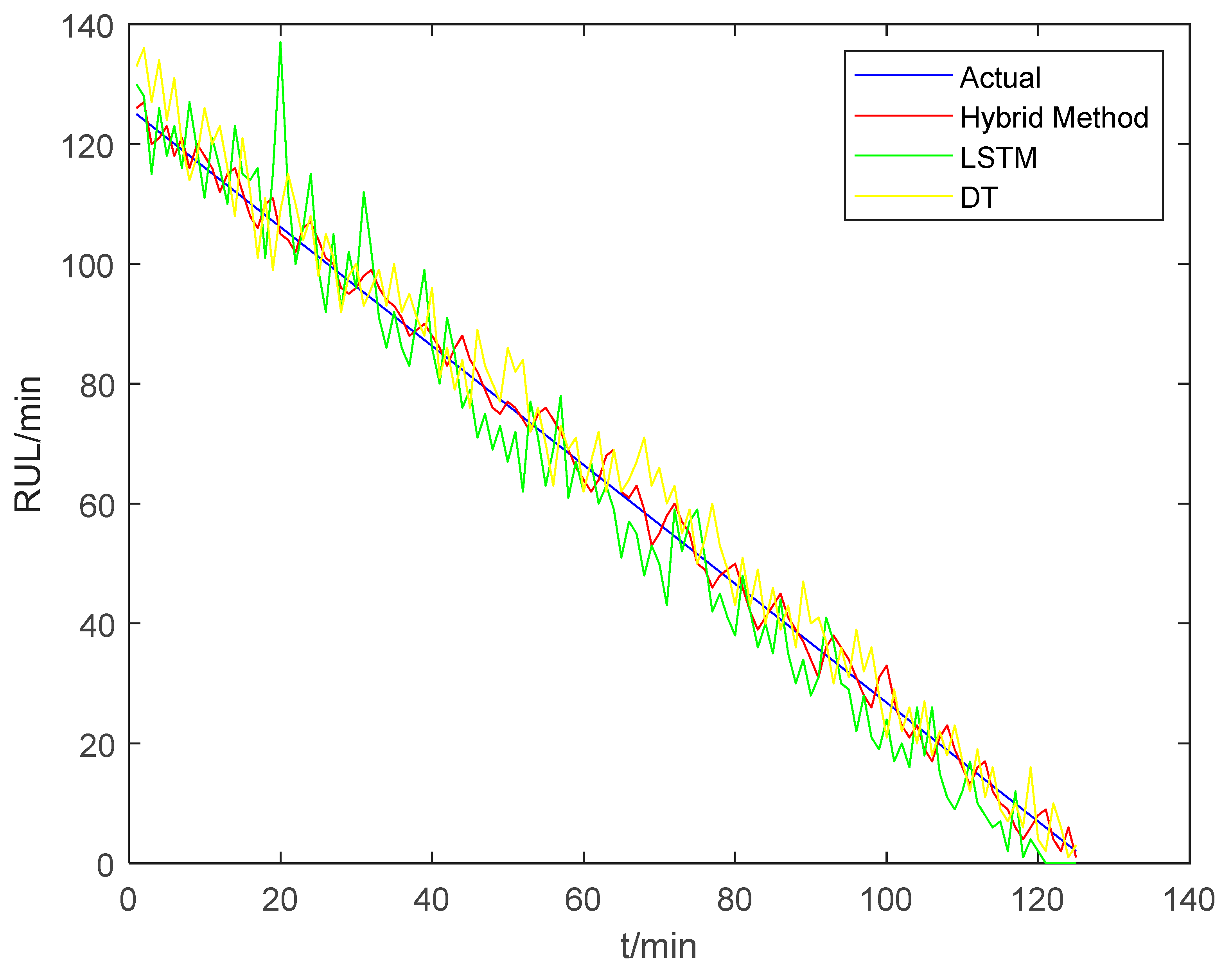
4.3. The Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Deng, F.; Chen, Z.; Liu, Y.; Yang, S.; Hao, R.; Lyu, L. A novel combination neural network based on ConvLSTM-Transformer for bearing remaining useful life prediction. Machines 2022, 10, 1226. [Google Scholar] [CrossRef]
- Li, X.; An, S.; Shi, Y.; Huang, Y. Remaining useful life estimation of rolling bearing based on SOA-SVM algorithm. Machines 2022, 10, 729. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Zimmermann, N.; Lang, S.; Blaser, P.; Mayr, J. Adaptive input selection for RUL compensation models. CIRP Ann. 2020, 69, 485–488. [Google Scholar] [CrossRef]
- Liang, Y.C.; Li, W.D.; Lou, P.; Hu, J.M. RUL prediction for heavy-duty CNC machines enabled by long short-term memory networks and fog-cloud architecture. J. Manuf. Syst. 2022, 62, 950–963. [Google Scholar] [CrossRef]
- Srikanth, I.; Arockiasamy, M. Deterioration models for prediction of remaining useful life of timber and concrete bridges: A review. J. Traffic Transp. Eng. 2020, 7, 152–173. [Google Scholar] [CrossRef]
- Yan, M.; Wang, X.; Wang, B.; Chang, M.; Muhammad, I. Bearing remaining useful life prediction using support vector machine and hybrid degradation tracking model. ISA Trans. 2020, 98, 471–482. [Google Scholar] [CrossRef]
- Li, X.; Cheng, J.; Shao, H.; Liu, K.; Cai, B. A fusion CWSMM-based framework for rotating machinery fault diagnosis under strong interference and imbalanced case. IEEE T. Ind. Inform. 2021, 18, 5180–5189. [Google Scholar] [CrossRef]
- Yan, X.; She, D.; Xu, Y.; Jia, M. Deep regularized variational autoencoder for intelligent fault diagnosis of rotor-bearing system within entire life-cycle process. Knowl.-Based Syst. 2021, 226, 107142. [Google Scholar] [CrossRef]
- Li, Y.; Huang, X.; Ding, P.; Zhao, C. Wiener-based remaining useful life prediction of rolling bearings using improved Kalman filtering and adaptive modification. Measurement 2021, 182, 109706. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y. Digital twin in industry: State-of-the-art. IEEE T. Ind. Inform. 2018, 15, 2405–2415. [Google Scholar] [CrossRef]
- Ma, M.; Mao, Z. Deep-convolution-based LSTM network for remaining useful life prediction. IEEE Trans. Ind. Inform. 2020, 17, 1658–1667. [Google Scholar] [CrossRef]
- Shi, Z.; Chehade, A. A dual-LSTM framework combining change point detection and remaining useful life prediction. Reliab. Eng. Syst. Saf. 2021, 205, 107257. [Google Scholar] [CrossRef]
- Park, K.; Choi, Y.; Choi, W.J.; Ryu, H.Y.; Kim, H. LSTM-based battery remaining useful life prediction with multi-channel charging profiles. IEEE Access 2020, 8, 20786–20798. [Google Scholar] [CrossRef]
- Ren, L.; Dong, J.; Wang, X.; Meng, Z.; Zhao, L.; Deen, M.J. A data-driven auto-CNN-LSTM prediction model for lithium-ion battery remaining useful life. IEEE Trans. Ind. Inform. 2020, 17, 3478–3487. [Google Scholar] [CrossRef]
- Liu, J.; Lei, F.; Pan, C.; Hu, D.; Zuo, H. Prediction of remaining useful life of multi-stage aero-engine based on clustering and LSTM fusion. Reliab. Eng. Syst. Saf. 2021, 214, 107807. [Google Scholar] [CrossRef]
- Zhao, C.; Huang, X.; Li, Y.; Li, S. A novel cap-LSTM model for remaining useful life prediction. IEEE Sens. J. 2021, 21, 23498–23509. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, Y.; Sun, J.; Cui, Z.; Wang, K. Stacked bidirectional LSTM RNN to evaluate the remaining useful life of supercapacitor. Int. J. Energy Res. 2022, 46, 3034–3043. [Google Scholar] [CrossRef]
- Fu, S.; Zhang, Y.; Lin, L.; Zhao, M.; Zhong, S.S. Deep residual LSTM with domain-invariance for remaining useful life prediction across domains. Reliab. Eng. Syst. Saf. 2021, 216, 108012. [Google Scholar] [CrossRef]
- Guo, J.; Yang, Z.; Chen, C.; Luo, W.; Hu, W. Real-time prediction of remaining useful life and preventive maintenance strategy based on digital twin. J. Comput. Inf. Sci. Eng. 2021, 21, 031003–031017. [Google Scholar] [CrossRef]
- He, B.; Liu, L.; Zhang, D. Digital twin-driven remaining useful life prediction for gear performance degradation: A review. J. Comput. Inf. Sci. Eng. 2021, 21, 030801. [Google Scholar] [CrossRef]
- Meraghni, S.; Terrissa, L.S.; Yue, M.; Ma, J.; Jemei, S.; Zerhouni, N. A data-driven digital-twin prognostics method for proton exchange membrane fuel cell remaining useful life prediction. Int. J. Hydrog. Energy 2021, 46, 2555–2564. [Google Scholar] [CrossRef]
- Zhang, R.; Zeng, Z.; Li, Y.; Liu, J.; Wang, Z. Research on Remaining Useful Life Prediction Method of Rolling Bearing Based on Digital Twin. Entropy 2022, 24, 1578. [Google Scholar] [CrossRef] [PubMed]
- Moghadam, F.K.; Nejad, A.R. Online condition monitoring of floating wind turbines drivetrain by means of digital twin. Mech. Syst. Signal Process. 2022, 162, 108087. [Google Scholar] [CrossRef]
- Qu, X.; Song, Y.; Liu, D.; Cui, X.; Peng, Y. Lithium-ion battery performance degradation evaluation in dynamic operating conditions based on a digital twin model. Microelectron. Reliab. 2020, 114, 113857. [Google Scholar] [CrossRef]
- Xiong, M.; Wang, H.; Fu, Q.; Xu, Y. Digital twin-driven aero-engine intelligent predictive maintenance. Int. J. Adv. Manuf. Technol. 2021, 114, 3751–3761. [Google Scholar] [CrossRef]
- Aivaliotis, P.; Georgoulias, K.; Chryssolouris, G. The use of Digital Twin for predictive maintenance in manufacturing. Int. J. Comput. Integr. Manuf. 2019, 32, 1067–1080. [Google Scholar] [CrossRef]
- Liu, R.J.; Li, H.S.; Lv, Z.H. Modeling methods of 3D model in digital twins. CMES-Comp. Model. Eng. 2023, 136, 985–1022. [Google Scholar] [CrossRef]
- Grieves, M.W. Product lifecycle management: The new paradigm for enterprises. Int. J. Prod. Dev. 2005, 2, 71–84. [Google Scholar] [CrossRef]
- Smagulova, K.; James, A.P. A survey on LSTM memristive neural network architectures and applications. Eur. Phys. J. Spec. Top. 2019, 228, 2313–2324. [Google Scholar] [CrossRef]
- Korstanje, J. LSTM RNNs. In Advanced Forecasting with Python: With State-of-the-Art-Models Including LSTMs, Facebook’s Prophet, and Amazon’s DeepAR; Apress: Berkeley, CA, USA, 2021; pp. 243–251. [Google Scholar]
- Chen, Z.C.; Chen, Z.N. Termal Characteristics Foundation of Machine Tools; Machinery Industry Press: Beijing, China, 1989. [Google Scholar]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Vrignat, P.; Kratz, F.; Avila, M. Sustainable manufacturing, maintenance policies, prognostics and health management: A literature review. Reliab. Eng. Syst. Saf. 2022, 218, 108140. [Google Scholar] [CrossRef]
- Tang, X.; Liu, K.; Lu, J.; Liu, B.; Wang, X.; Gao, F. Battery incremental capacity curve extraction by a two-dimensional Luenberger-Gaussian-moving-average filter. Appl. Energy 2020, 280, 115895. [Google Scholar] [CrossRef]
- Baker, J.W.; Schubert, M.; Faber, M.H. On the assessment of robustness. Struct. Saf. 2008, 30, 253–267. [Google Scholar] [CrossRef]
- Xia, M.; Li, T.; Shu, T.; Wan, J.; De Silva, C.W.; Wang, Z. A two-stage approach for the remaining useful life prediction of bearings using deep neural networks. IEEE Trans. Ind. Inform. 2018, 15, 3703–3711. [Google Scholar] [CrossRef]
- Wang, Q.; Xu, K.; Kong, X.; Huai, T. A linear mapping method for predicting accurately the RUL of rolling bearing. Measurement 2021, 176, 109127. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Dataset | Trainset | Testset | |
|---|---|---|---|
| Rolling Element Bearing | 12,200 | 8540 | 3660 |
| Part | REB |
|---|---|
| Material | GCr15 |
| Density/(g/m2) | 7.83 |
| Modulus of elasticity E/GPa | 2.19 |
| Poisson’s ratio μ | 0.3 |
| Thermal conductivity/(W/m°C) | 49 |
| Coefficient of thermal expansion/(°C−1) | 13.5 × 10−6 |
| Number | Parameter Name | Value |
|---|---|---|
| 1 | Inner diameter | 30 mm |
| 2 | Outer diameter | 62 mm |
| 3 | Pitch diameter | 46 mm |
| 4 | Ball diameter | 9.25 mm |
| 5 | REB width | 16 mm |
| 6 | Number of balls | 8 |
| 7 | Coefficient of curvature radius of inner groove | 0.515 |
| 8 | Coefficient of curvature radius of external groove | 0.52 |
| Model Structure | LSTM Two-Layer Maximum Residual Error (μm) | LSTM Three-Layer Maximum Residual Error (μm) | LSTM Four-Layer Maximum Residual Error (μm) |
|---|---|---|---|
| eight hidden nodes | 11.6 | 8 | 17 |
| twelve hidden nodes | 7 | 10.4 | 20 |
| sixteen hidden nodes | 9 | 12.6 | 25.3 |
| twenty hidden nodes | 10.3 | 11 | 17.6 |
| Method | Robustness |
|---|---|
| DT | 0.754 |
| LSTM | 0.841 |
| Hybrid Method | 0.96 |
| Method | Start Stage Accuracy | Middle Stage Accuracy | End Stage Accuracy | Average Accuracy |
|---|---|---|---|---|
| DT | 90% | 87% | 81% | 86% |
| LSTM | 97.5% | 89.5% | 84.5% | 90.5% |
| Hybrid Method | 100% | 97.5% | 95% | 97.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Q.; Li, M. Digital Twin-Driven Remaining Useful Life Prediction for Rolling Element Bearing. Machines 2023, 11, 678. https://doi.org/10.3390/machines11070678
Lu Q, Li M. Digital Twin-Driven Remaining Useful Life Prediction for Rolling Element Bearing. Machines. 2023; 11(7):678. https://doi.org/10.3390/machines11070678
Chicago/Turabian StyleLu, Quanbo, and Mei Li. 2023. "Digital Twin-Driven Remaining Useful Life Prediction for Rolling Element Bearing" Machines 11, no. 7: 678. https://doi.org/10.3390/machines11070678
APA StyleLu, Q., & Li, M. (2023). Digital Twin-Driven Remaining Useful Life Prediction for Rolling Element Bearing. Machines, 11(7), 678. https://doi.org/10.3390/machines11070678