
An Improved Crack Breathing Model and Its Application in Crack Identification for Rotors



Abstract
1. Introduction
2. Modelling of a Rotor–Bearing System with a Breathing Crack
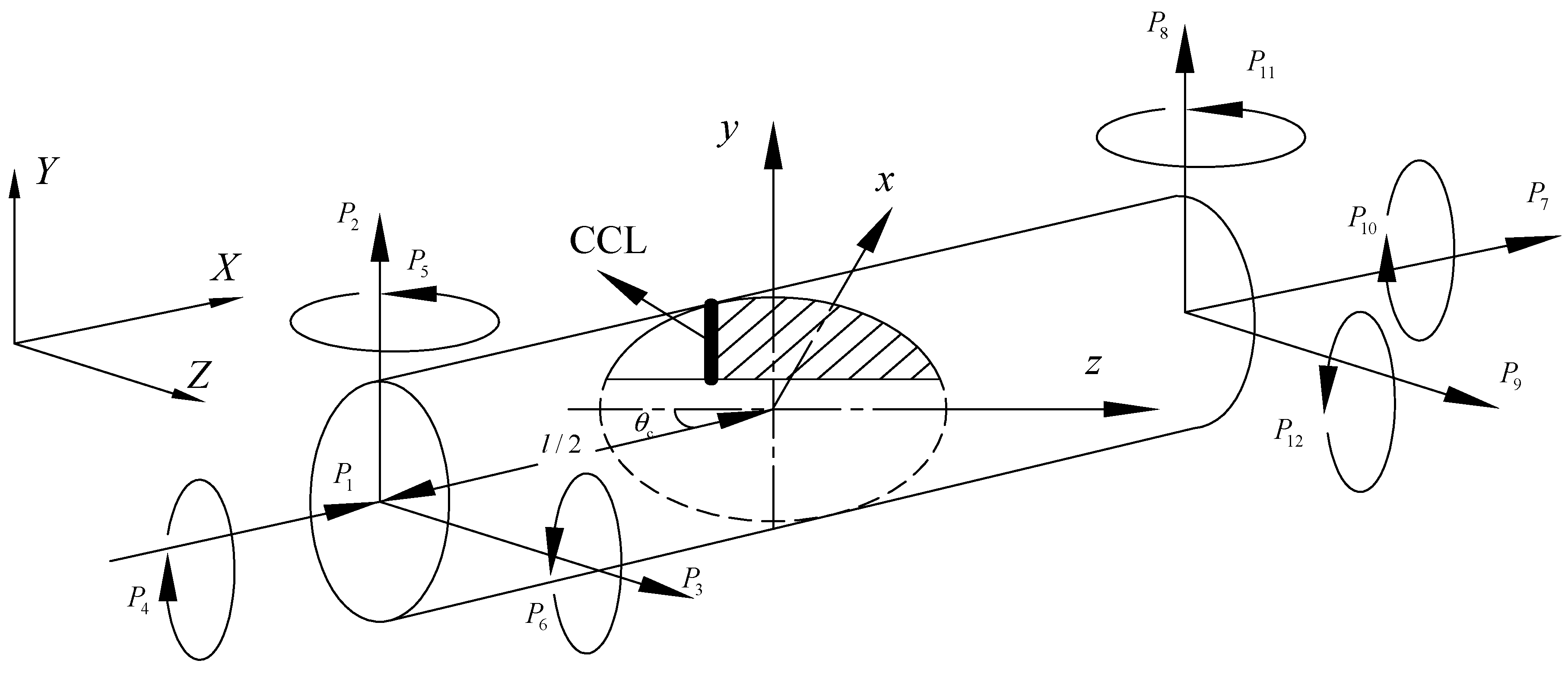
2.1. Crack Stiffness Matrix Calculation
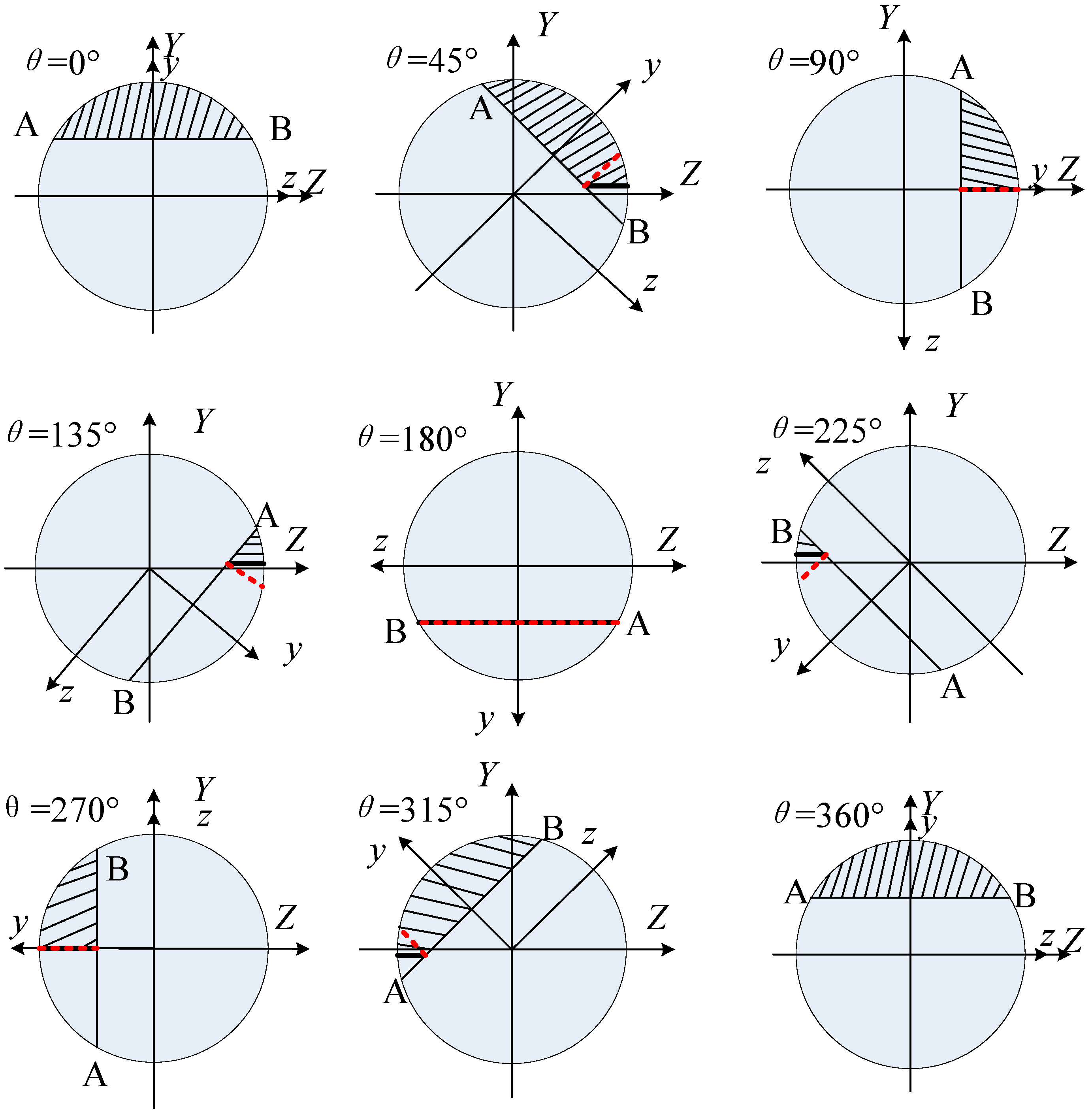
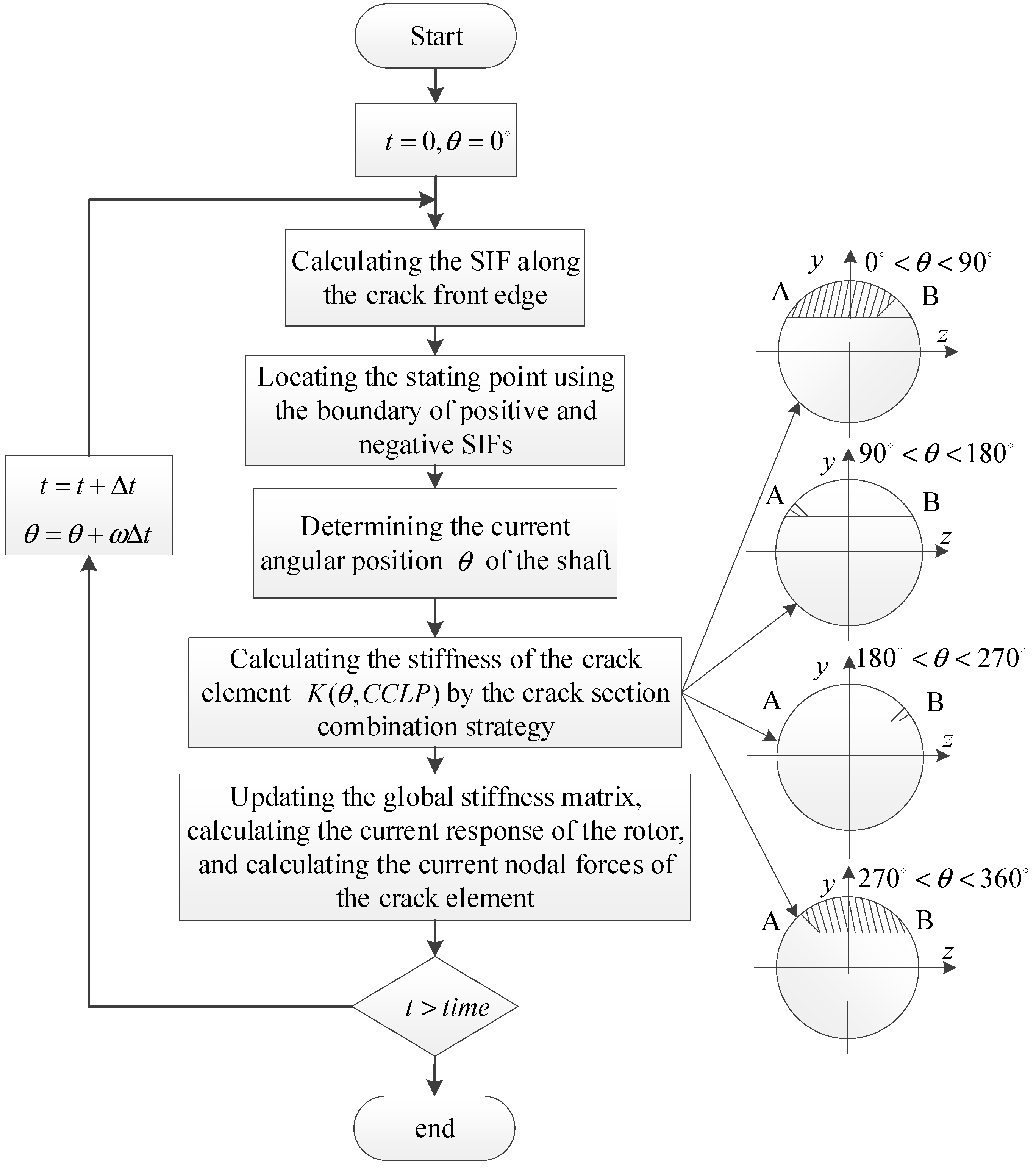
2.2. Improved Breathing Crack Model
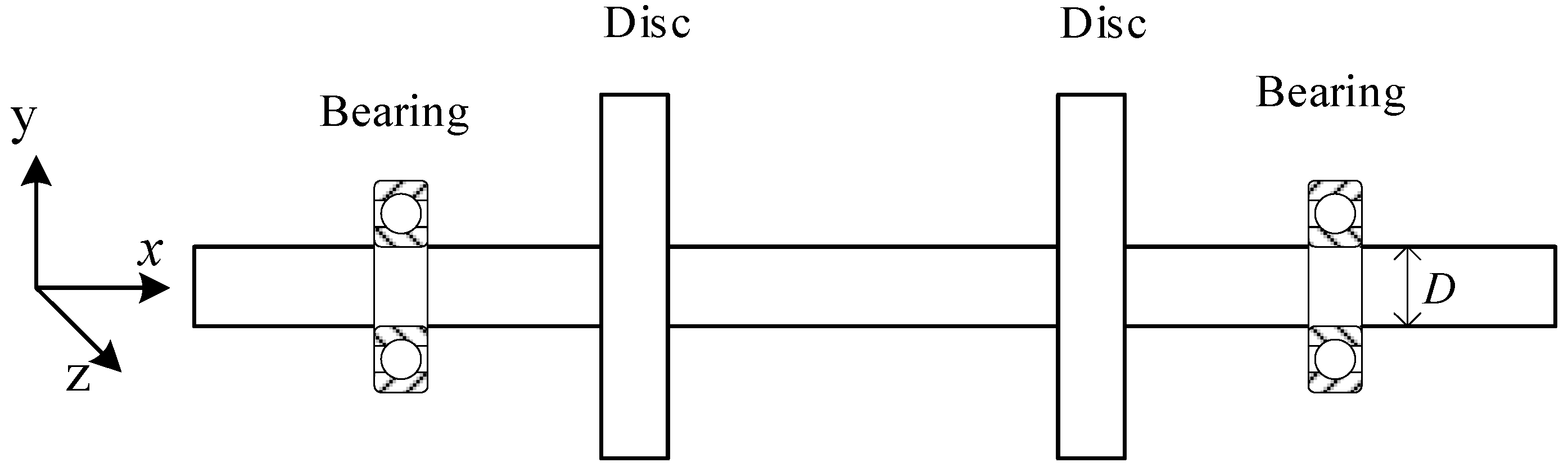
2.3. Finite Element Model of the Cracked Rotor–Bearing System
2.4. Model Validation
3. Crack Identification Based on Artificial Neural Network
3.1. Samples Generating and Network Training
3.2. Crack Identification Results
4. Conclusions
- (1)
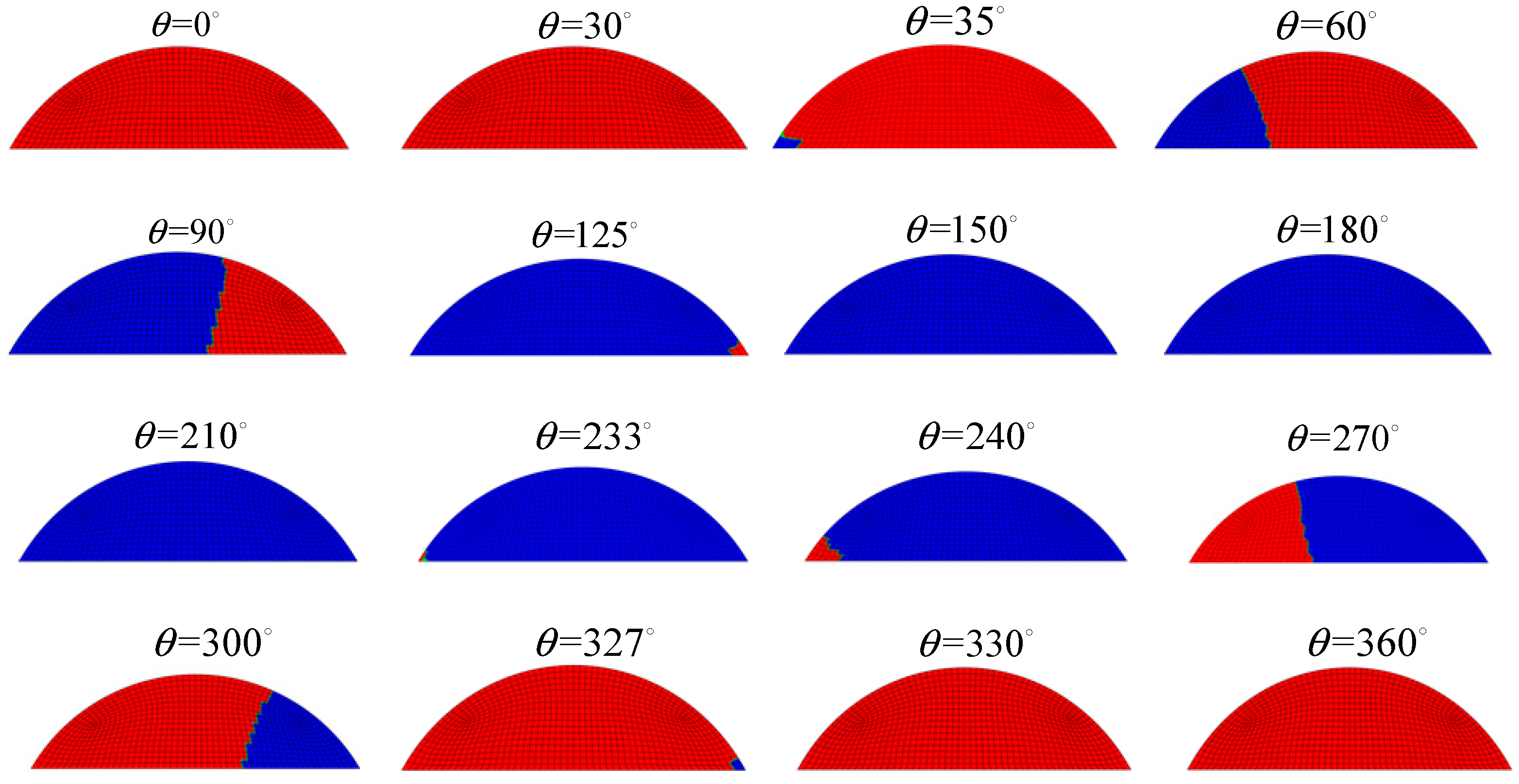
- A cracked rotor with a response-dependent nonlinear breathing crack was modelled using the finite element method, and the original CCLP crack breathing model was improved by implementing a more reasonable crack closure line. The improved breathing model was validated by comparison with the original CCLP model and the 3D contact model. The dynamic responses were also compared, and the results indicate that the improved model is accurate and can reflect the super-harmonic nonlinear behavior of cracks better. The advantages of the improved crack model can be summarized as follows: (i) The improved crack model can consider the effect of stress intensity factor at the crack front, which makes the crack stiffness calculation more accurate. (ii) It can describe cracks with any crack angle under arbitrary excitations. (iii) It can describe the crack closure line more accurately and reasonably with affordable computation burden.
- (2)
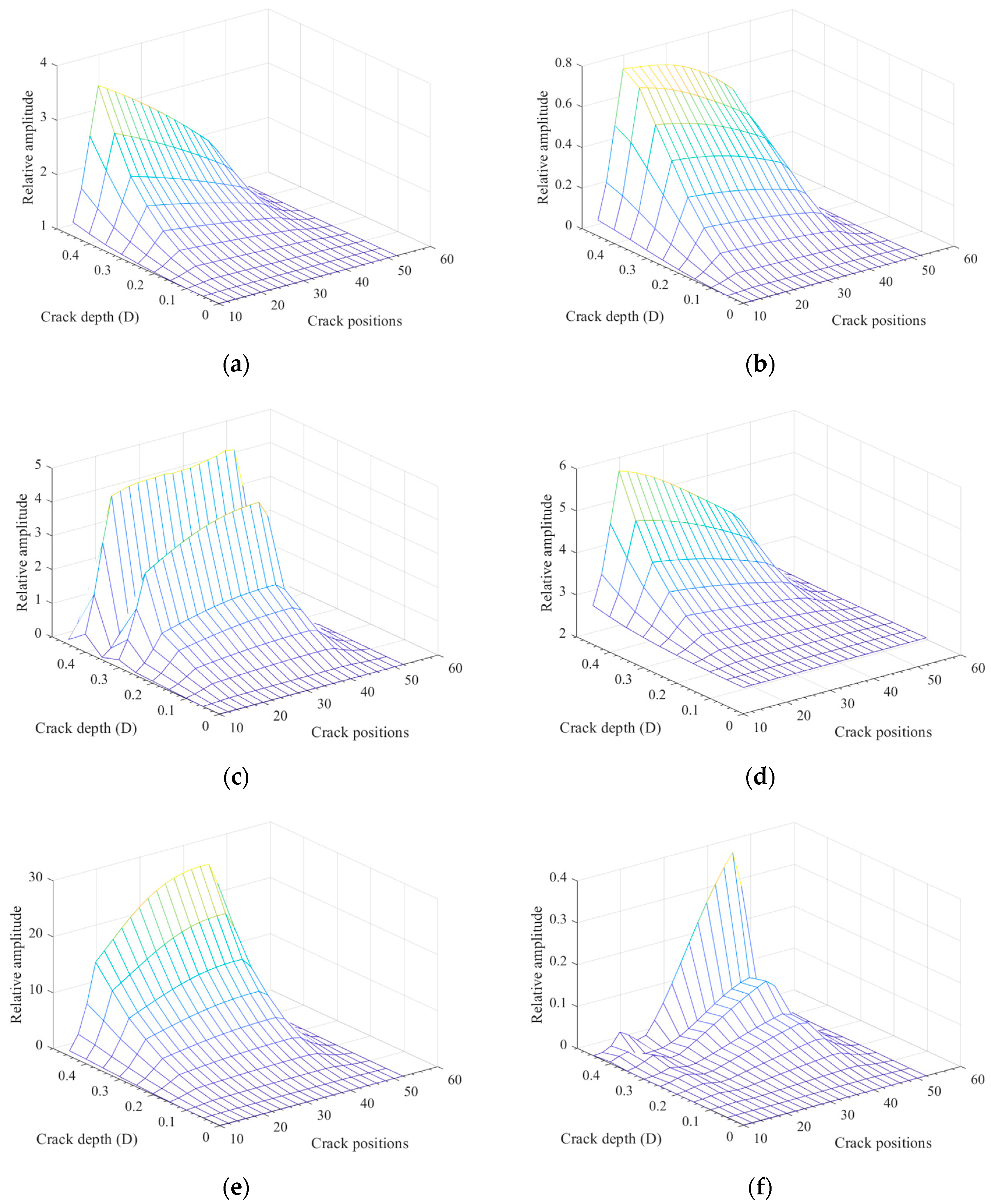
- Variation rules of super-harmonic features with different crack positions and crack depths at 1/3 and 1/2 critical speed were investigated. The results show that 1× and 2× components are good indicators to distinguish different crack parameters.
- (3)
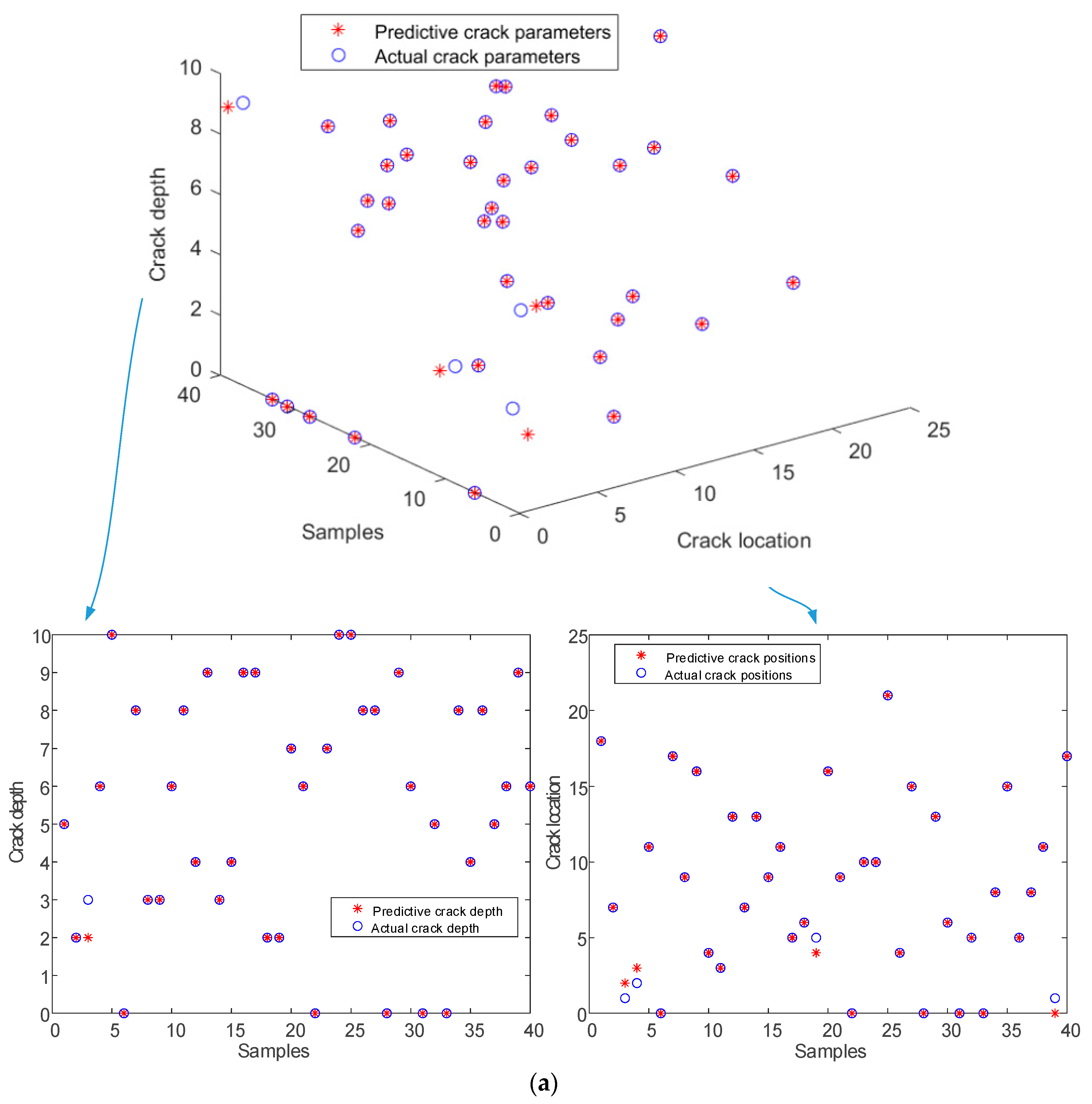
- A backward propagation (BP) artificial neural network was established using the features of 1× and 2× super-harmonic components at 1/3 and 1/2 critical speeds from two measurement points as inputs, and the corresponding crack locations and depths as outputs. The identification results show that the established network is efficient for crack position and depth identification, and, with the increase in the noise level, the identification accuracy remains higher than 90% but degrades to some degree. What is more, the detectable probability and false-alarm probability are robust to noise, which shows good performance for engineering applications.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bovsunovsky, A.; Surace, C. Non-linearities in the vibrations of elastic structures with a closing crack: A state of the art review. Mech. Syst. Signal Process. 2015, 62, 129–148. [Google Scholar] [CrossRef]
- Kushwaha, N.; Patel, V.N. Modelling and analysis of a cracked rotor: A review of the literature and its implications. Arch. Appl. Mech. 2020, 90, 1215–1245. [Google Scholar] [CrossRef]
- Kumar, C.; Rastogi, V. A Brief Review on Dynamics of a Cracked Rotor. Int. J. Rotating Mach. 2009, 2009, 758108. [Google Scholar] [CrossRef]
- Papadopoulos, C.A. The strain energy release approach for modeling cracks in rotors: A state of the art review. Mech. Syst. Signal Process. 2008, 22, 763–789. [Google Scholar] [CrossRef]
- Sabnavis, G.; Kirk, R.G.; Kasarda, M.; Quinn, D. Cracked shaft detection and diagnostics: A literature review. Shock. Vib. Dig. 2004, 36, 287. [Google Scholar] [CrossRef]
- Friswell, M.I.; Penny, J.E. Crack modeling for structural health monitoring. Struct. Health Monit. 2002, 1, 139–148. [Google Scholar] [CrossRef]
- Jun, O.S.; Eun, H.J.; Earmme, Y.Y.; Lee, C.W. Modelling and vibration analysis of a simple rotor with a breathing crack. J. Sound Vib. 1992, 155, 273–290. [Google Scholar] [CrossRef]
- Al-Shudeifat, M.A. Impact of non-synchronous whirl on post-resonance backward whirl in vertical cracked rotors. J. Sound Vib. 2021, 520, 116605. [Google Scholar] [CrossRef]
- Han, Q.; Zhao, J.; Lu, W.; Peng, Z.; Chu, F. Steady-state response of a geared rotor system with slant cracked shaft and time-varying mesh stiffness. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1156–1174. [Google Scholar] [CrossRef]
- Giannopoulos, G.I.; Georgantzinos, S.K.; Anifantis, N.K. Coupled vibration response of a shaft with a breathing crack. J. Sound Vib. 2015, 336, 191–206. [Google Scholar] [CrossRef]
- El Arem, S. On the mechanics of beams and shafts with cracks: A standard and generic approach. Eur. J. Mech. A/Solids 2020, 85, 104088. [Google Scholar] [CrossRef]
- Kulesza, Z.; Sawicki, J.T. Rigid finite element model of a cracked rotor. J. Sound Vib. 2012, 331, 4145–4169. [Google Scholar] [CrossRef]
- Wand, D.; Cao, H.; Yang, Y.; Du, M. Dynamic modelling and vibration analysis of cracked rotor-bearing system based on rigid body element method. Mech. Syst. Signal Process. 2023, 191, 110152. [Google Scholar]
- Darpe, A.K. Coupled vibrations of a rotor with slant crack. J. Sound Vib. 2007, 305, 172–193. [Google Scholar] [CrossRef]
- Guo, C.; Yan, J.; Yang, W. Crack detection for a Jeffcott rotor with a transverse crack: An experimental investigation. Mech. Syst. Signal Process. 2017, 83, 260–271. [Google Scholar] [CrossRef]
- Ganguly, K.; Roy, H. A novel geometric model of breathing crack and its influence on rotor dynamics. J. Vib. Control 2021, 28, 1802379016. [Google Scholar] [CrossRef]
- Kushwaha, N.; Patel, V.N. Nonlinear dynamic analysis of two-disk rotor system containing an unbalance influenced transverse crack. Nonlinear Dyn. 2023, 111, 1109–1137. [Google Scholar] [CrossRef]
- Yan, D.; Chen, Q.; Zheng, Y.; Liu, W. Parameter sensitivity and dynamic characteristic analysis of bulb hydro generating unit with shaft crack fault. Mech. Syst. Signal Process. 2021, 158, 107732. [Google Scholar] [CrossRef]
- Muñoz-Abella, B.; Montero, L.; Rubio, P.; Rubio, L. Determination of the Critical Speed of a Cracked Shaft from Experimental Data. Sensors 2022, 22, 9777. [Google Scholar] [CrossRef]
- Zhang, B.; Li, Y. Six degrees of freedom coupled dynamic response of rotor with a transverse breathing crack. Nonlinear Dyn. 2014, 78, 1843–1861. [Google Scholar] [CrossRef]
- Darpe, A.K.; Gupta, K.; Chawla, A. Coupled bending, longitudinal and torsional vibrations of a cracked rotor. J. Sound Vib. 2004, 269, 33–60. [Google Scholar] [CrossRef]
- Patel, T.H.; Darpe, A.K. Influence of crack breathing model on nonlinear dynamics of a cracked rotor. J. Sound Vib. 2008, 311, 953–972. [Google Scholar] [CrossRef]
- Bachschmid, N.; Pennacchi, P.; Tanzi, E. Some remarks on breathing mechanism, on non-linear effects and on slant and helicoidal cracks. Mech. Syst. Signal Process. 2008, 22, 879–904. [Google Scholar] [CrossRef]
- Soeffker, D.; Wei, C.; Wolff, S.; Saadawia, M.S. Detection of rotor cracks: Comparison of an old model-based approach with a new signal-based approach. Nonlinear Dyn. 2016, 83, 1153–1170. [Google Scholar] [CrossRef]
- Rathna Prasad, S.; Sekhar, A.S. Detection and localization of fatigue-induced transverse crack in a rotor shaft using principal component analysis. Struct. Health Monit. 2020, 20, 84066386. [Google Scholar] [CrossRef]
- Xiang, L.; Zhang, Y.; Hu, A.; Ye, F. Dynamic analysis and experiment investigation of a cracked dual-disc bearing-rotor system based on orbit morphological characteristics. Appl. Math. Model. 2020, 80, 17–32. [Google Scholar] [CrossRef]
- Dong, H.B.; Chen, X.F.; Li, B.; Qi, K.Y.; He, Z.J. Rotor crack detection based on high-precision modal parameter identification method and wavelet finite element model. Mech. Syst. Signal Process. 2009, 23, 869–883. [Google Scholar] [CrossRef]
- Zapico-Valle, J.L.; Rodríguez, E.; García-Diéguez, M.; Cortizo, J.L. Rotor crack identification based on neural networks and modal data. Meccanica 2014, 49, 305–324. [Google Scholar] [CrossRef]
- Sathujoda, P. Detection of a slant crack in a rotor bearing system during shut-down. Mech. Based Des. Struct. Mach. 2020, 48, 266–276. [Google Scholar] [CrossRef]
- Lin, Y.; Chu, F. The dynamic behavior of a rotor system with a slant crack on the shaft. Mech. Syst. Signal Process. 2010, 24, 522–545. [Google Scholar] [CrossRef]
- Spiros Pantelakis, P.; Chasalevris, A.C.; Papadopoulos, C.A. Experimental detection of an early developed crack in rotor-bearing systems using an AMB. Int. J. Struct. Integr. 2015, 6, 194–213. [Google Scholar] [CrossRef]
- Kulesza, Z. Dynamic behavior of cracked rotor subjected to multisine excitation. J. Sound Vib. 2014, 333, 1369–1378. [Google Scholar] [CrossRef]
- Cavalini, A.A., Jr.; Sanches, L.; Bachschmid, N.; Steffen Jr, V. Crack identification for rotating machines based on a nonlinear approach. Mech. Syst. Signal Process. 2016, 79, 72–85. [Google Scholar] [CrossRef]
- Chandra, N.H.; Sekhar, A.S. Fault detection in rotor bearing systems using time frequency techniques. Mech. Syst. Signal Process. 2016, 72, 105–133. [Google Scholar] [CrossRef]
- Sampaio, D.L.; Nicoletti, R. Detection of cracks in shafts with the Approximated Entropy algorithm. Mech. Syst. Signal Process. 2016, 72, 286–302. [Google Scholar] [CrossRef]
- Sinou, J. Detection of cracks in rotor based on the 2× and 3× super-harmonic frequency components and the crack–unbalance interactions. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 2024–2040. [Google Scholar] [CrossRef]
- Gómez, M.J.; Castejón, C.; Corral, E.; García-Prada, J.C. Analysis of the influence of crack location for diagnosis in rotating shafts based on 3 x energy. Mech. Mach. Theory 2016, 103, 167–173. [Google Scholar] [CrossRef]
- Guo, C.; Al-Shudeifat, M.A.; Yan, J.; Bergman, L.A.; McFarland, D.M.; Butcher, E.A. Application of empirical mode decomposition to a Jeffcott rotor with a breathing crack. J. Sound Vib. 2013, 332, 3881. [Google Scholar] [CrossRef]
- Wang, C.; Zheng, Z.; Guo, D.; Liu, T.; Xie, Y.; Zhang, D. An Experimental Setup to Detect the Crack Fault of Asymmetric Rotors Based on a Deep Learning Method. Appl. Sci. 2023, 13, 1327. [Google Scholar] [CrossRef]
- Jin, Y.; Hou, L.; Chen, Y.; Lu, Z. An effective crack position diagnosis method for the hollow shaft rotor system based on the convolutional neural network and deep metric learning. Chin. J. Aeronaut. 2021, 35, 242–254. [Google Scholar] [CrossRef]
- Guo, T.; Wu, L.; Wang, C.; Xu, Z. Damage detection in a novel deep-learning framework: A robust method for feature extraction. Struct. Health Monit. 2020, 19, 424–442. [Google Scholar] [CrossRef]
- Babu Rao, K.; Mallikarjuna Reddy, D. Fault detection in rotor system by discrete wavelet neural network algorithm. J. Vib. Control 2021, 28, 1802379037. [Google Scholar] [CrossRef]
- Guo, C.Z.; Yan, J.H.; Bergman, L.A. Experimental Dynamic Analysis of a Breathing Cracked Rotor. Chin. J. Mech. Eng. 2017, 30, 1177–1183. [Google Scholar] [CrossRef]
- Lu, Z.; Lv, Y.; Ouyang, H. A Super-Harmonic Feature Based Updating Method for Crack Identification in Rotors Using a Kriging Surrogate Model. Appl. Sci. 2019, 9, 2428. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Neilson, R.D.; Deans, W.F.; MacConnell, P. Crack detection in a rotating shaft using artificial neural networks and PSD characterisation. Meccanica 2014, 49, 255–266. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State of Crack Open and Close | ICCLP | CCLP | Three-Dimensional Contact Model |
|---|---|---|---|
| Start opening | 33° | 30° | 35° |
| Fully open | 130° | 140° | 125° |
| Start closing | 228° | 220° | 233° |
| Fully closed | 328° | 330° | 327° |
| Evaluation Index | No Noise | 5% Noise | 10% Noise |
|---|---|---|---|
| Detectable probability | 100% | 100% | 100% |
| False-alarm probability | 0% | 0% | 0% |
| Identified location probability | 100% | 92.5% | 90% |
| Identified depth probability | 97.5% | 97.3% | 97.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Cao, S.; Lu, Z. An Improved Crack Breathing Model and Its Application in Crack Identification for Rotors. Machines 2023, 11, 569. https://doi.org/10.3390/machines11050569
Liu Q, Cao S, Lu Z. An Improved Crack Breathing Model and Its Application in Crack Identification for Rotors. Machines. 2023; 11(5):569. https://doi.org/10.3390/machines11050569
Chicago/Turabian StyleLiu, Qi, Shancheng Cao, and Zhiwen Lu. 2023. "An Improved Crack Breathing Model and Its Application in Crack Identification for Rotors" Machines 11, no. 5: 569. https://doi.org/10.3390/machines11050569
APA StyleLiu, Q., Cao, S., & Lu, Z. (2023). An Improved Crack Breathing Model and Its Application in Crack Identification for Rotors. Machines, 11(5), 569. https://doi.org/10.3390/machines11050569