
A Study on Using Location-Information-Based Flow Field Reconstruction to Model the Characteristics of a Discharging Valve in a Hydrodynamic Retarder

 ,
,
Abstract
1. Introduction
2. Methodology
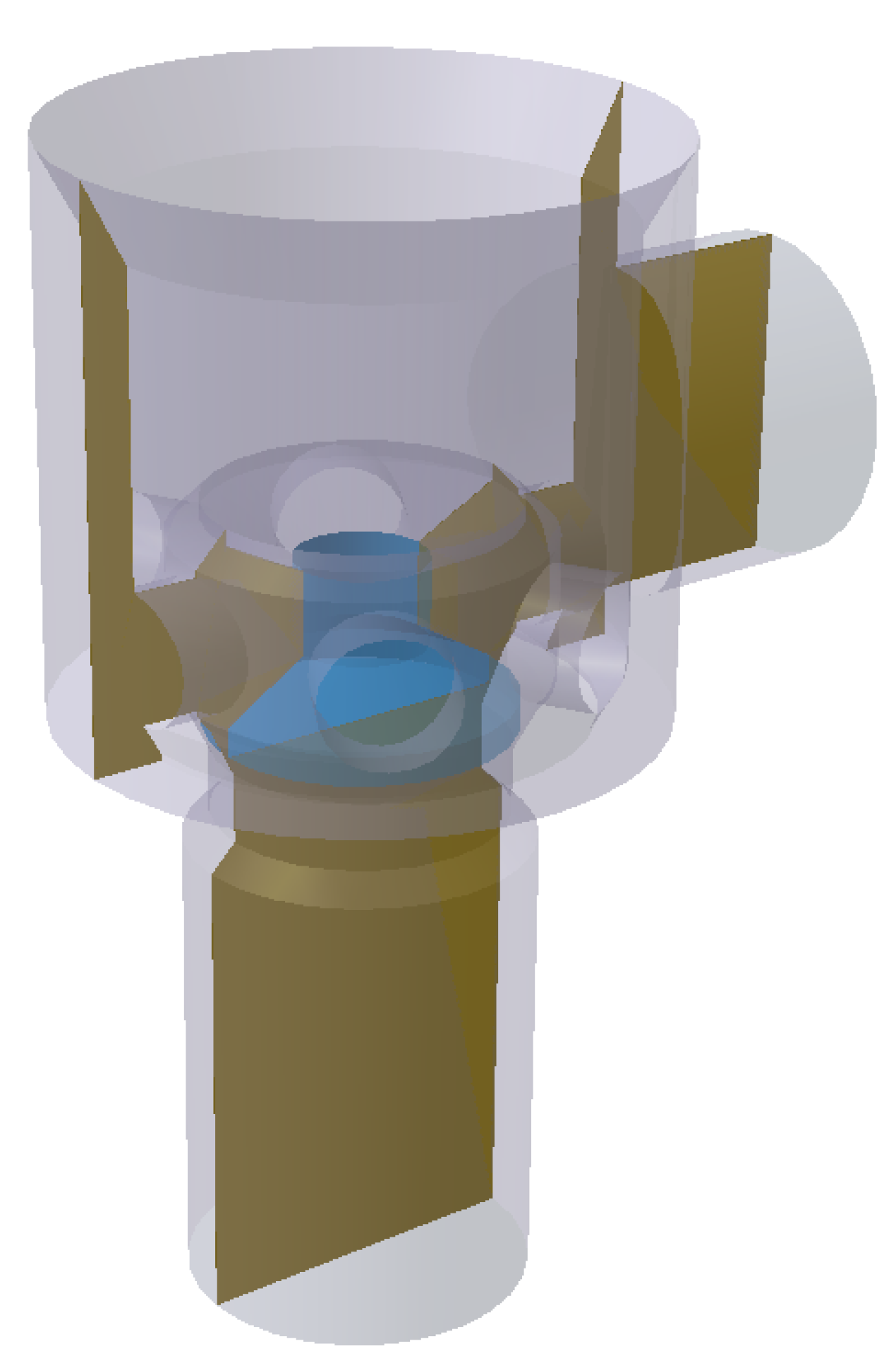
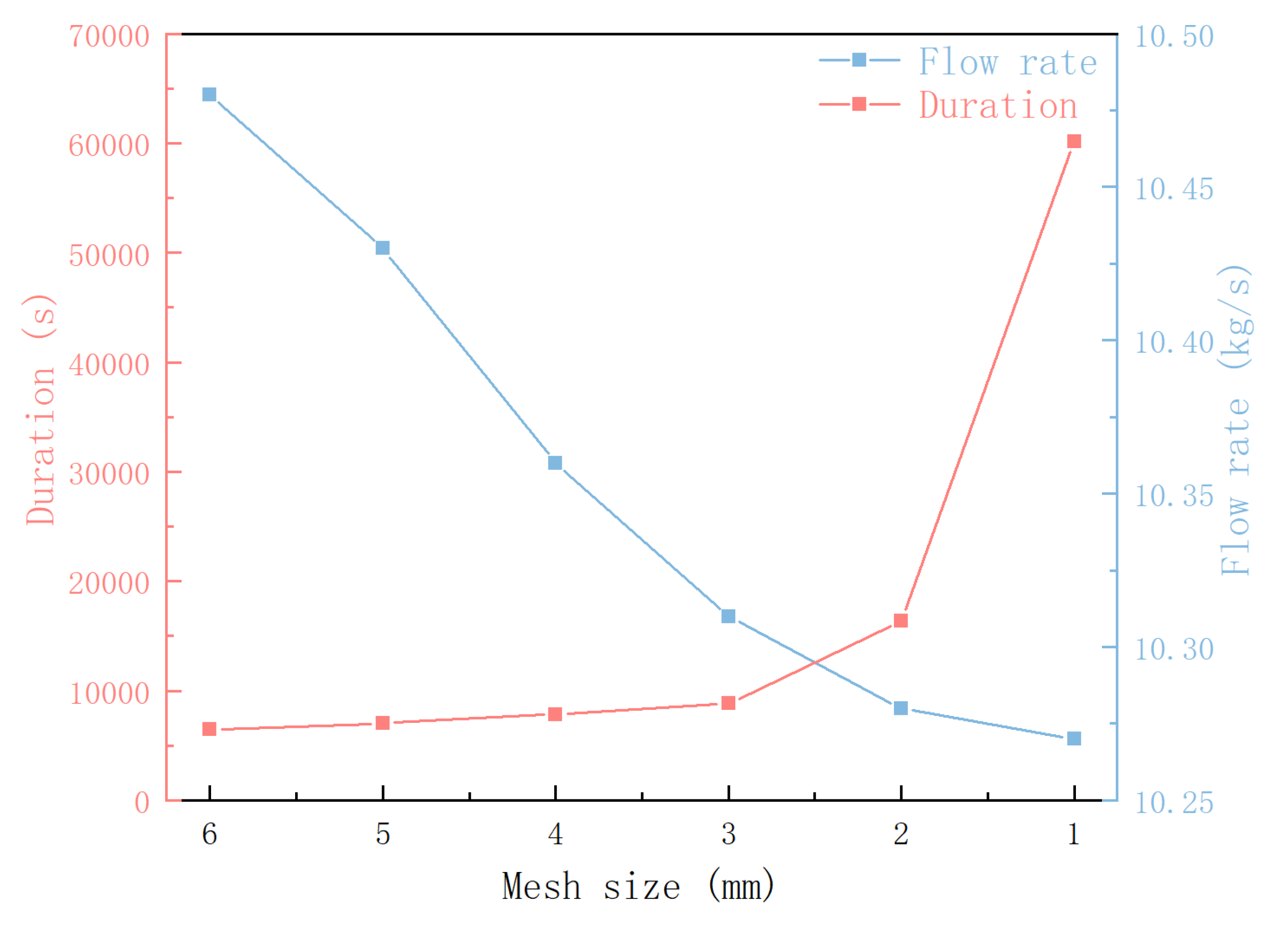
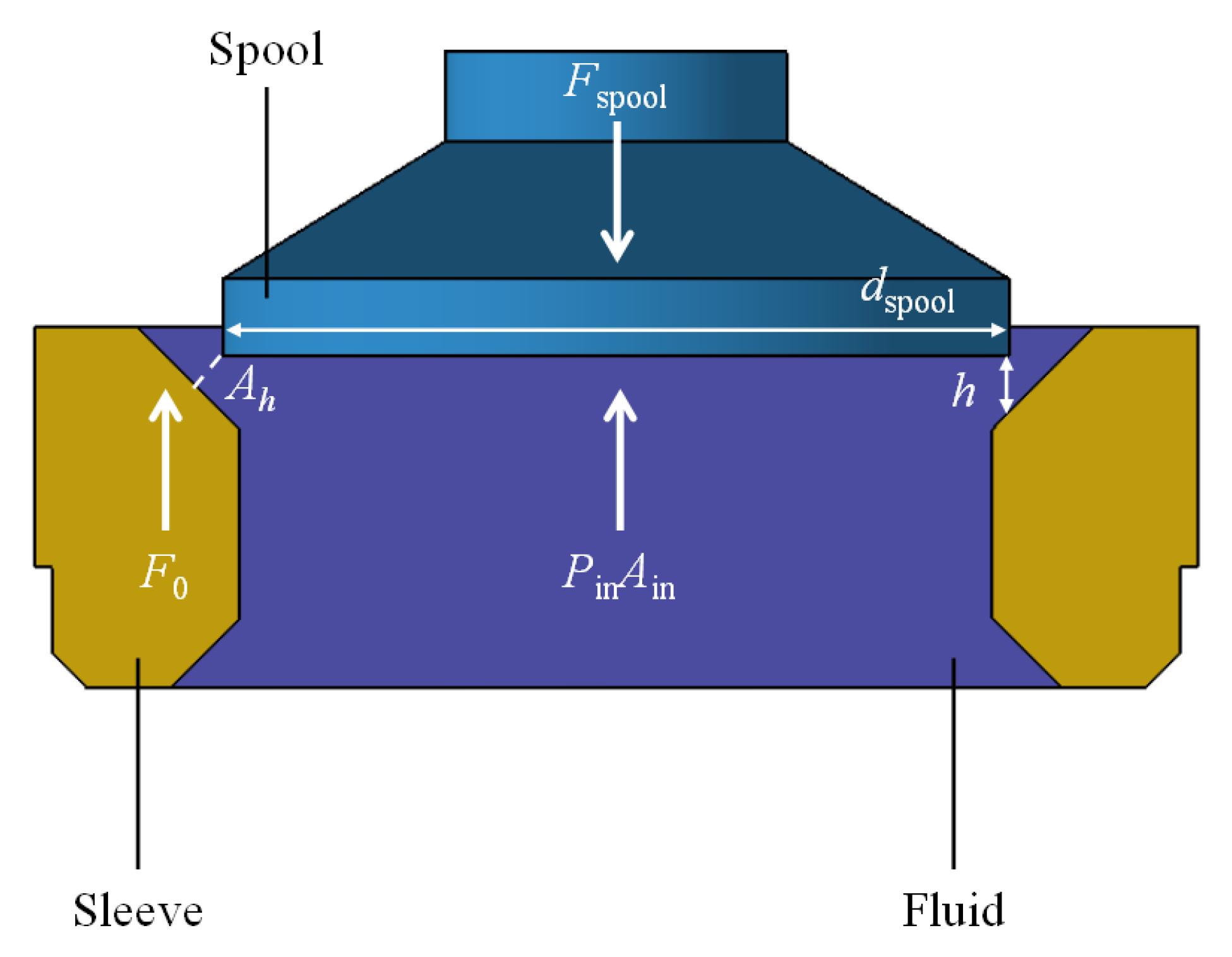
2.1. Discharging Valve Simulation
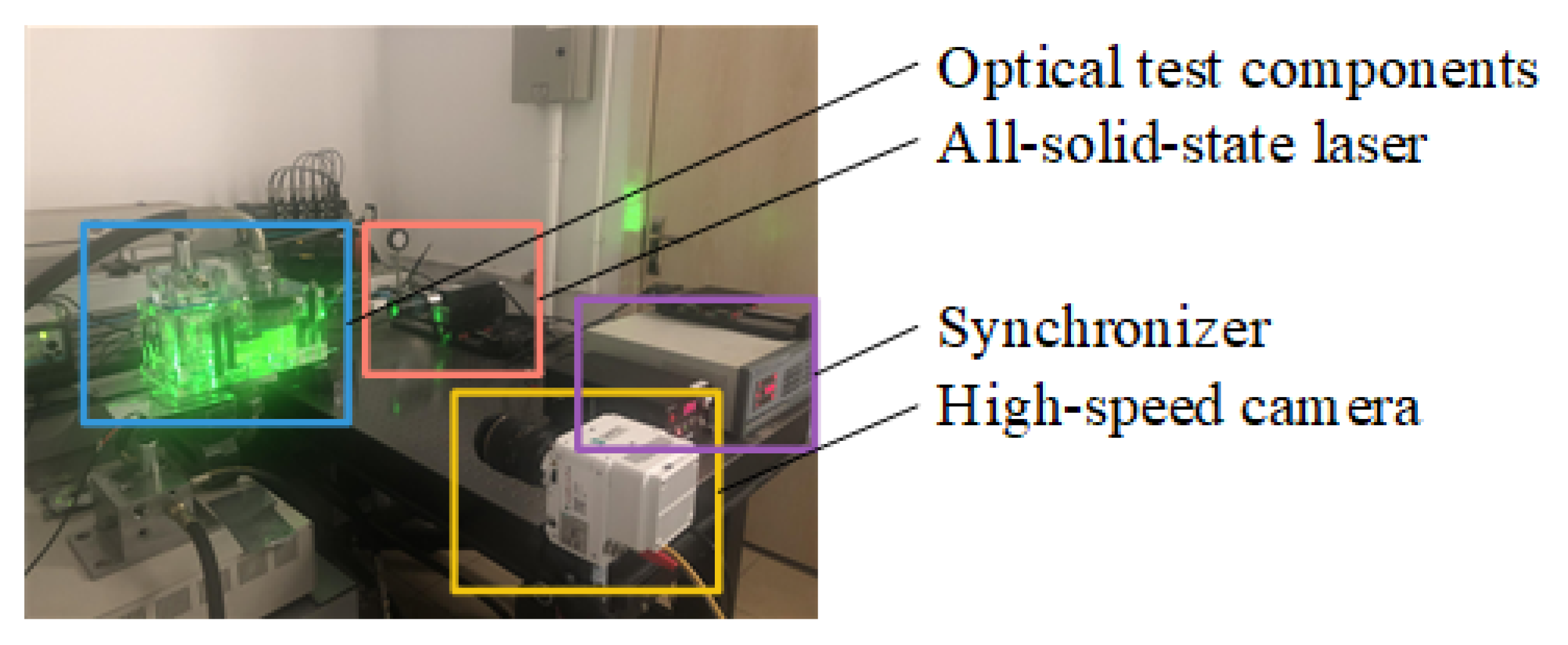
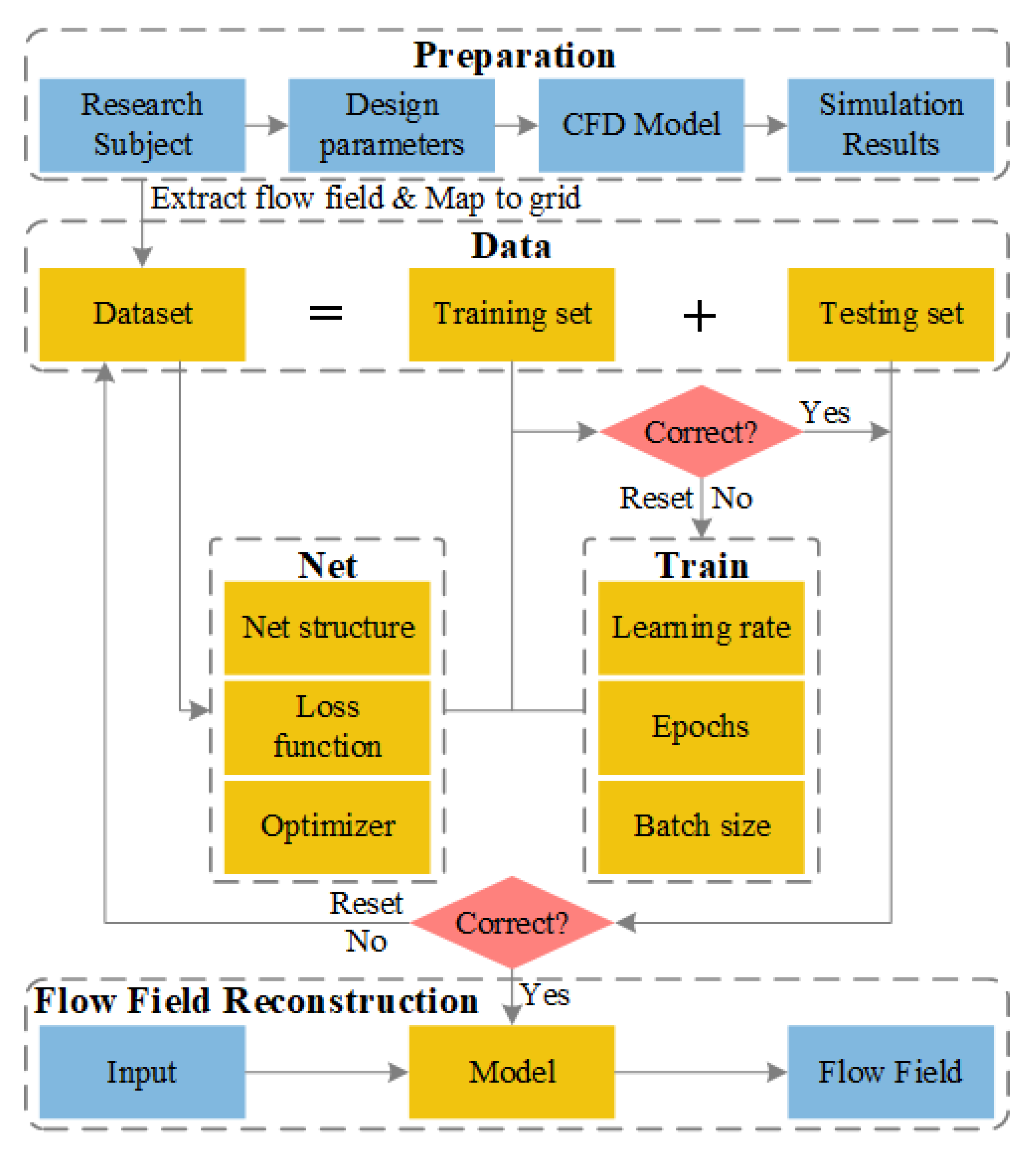
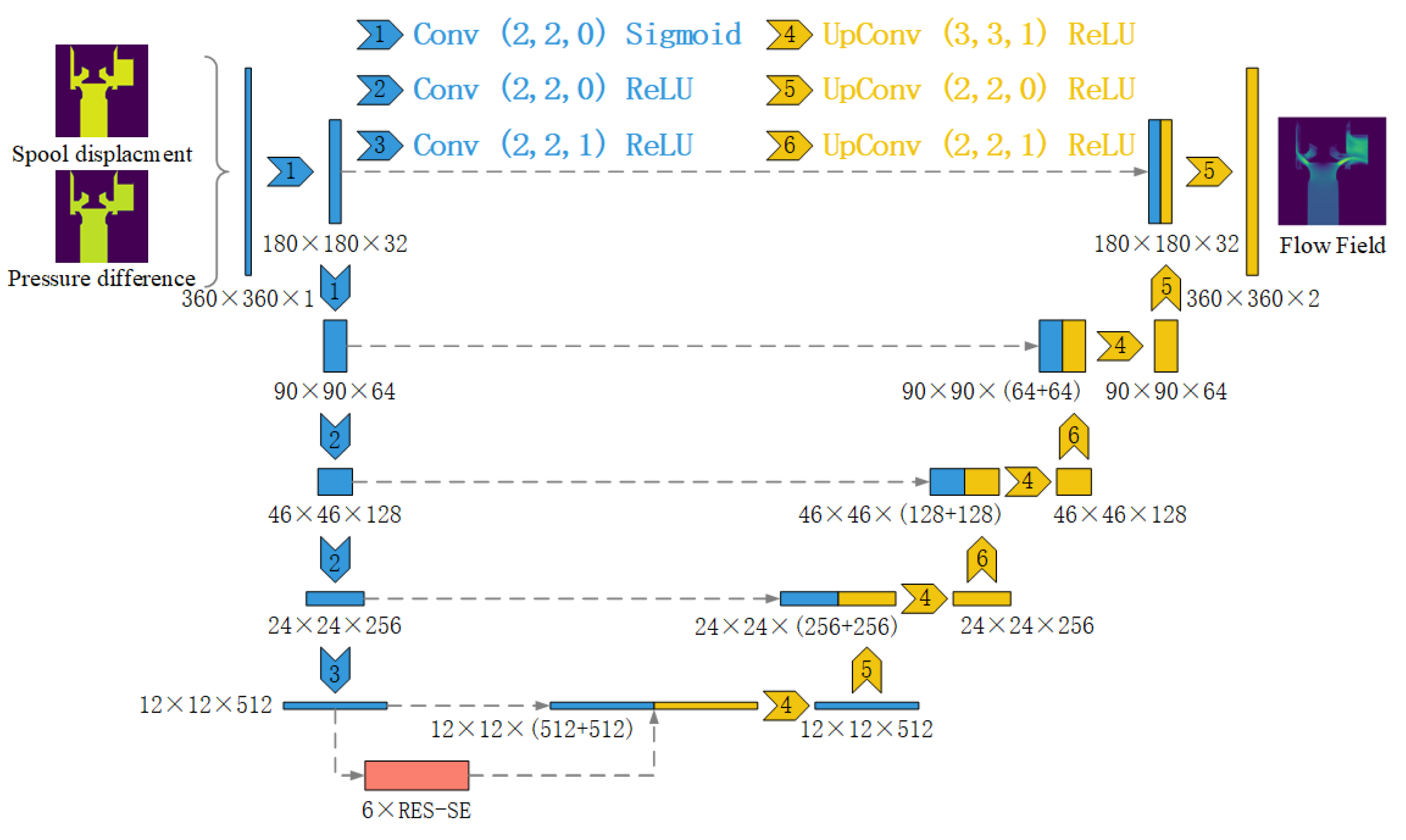
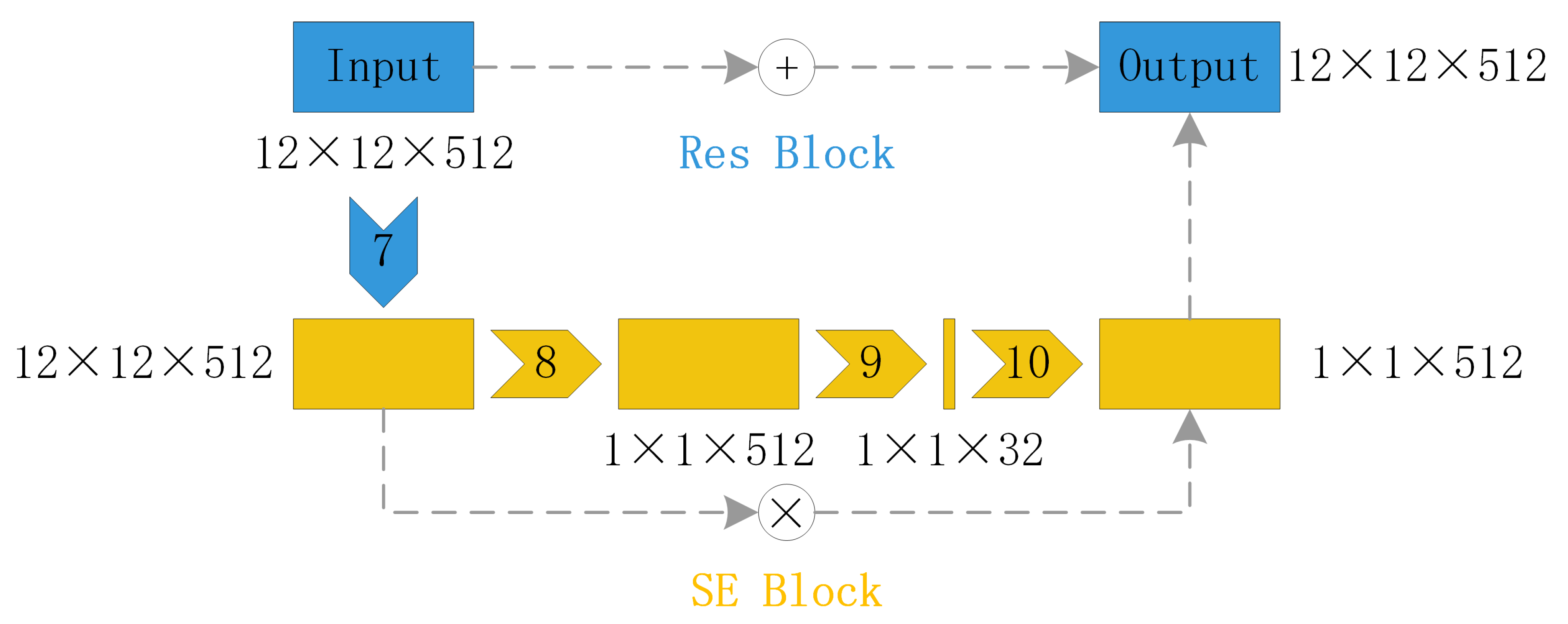
2.2. Flow Field Reconstruction Using Deep Learning
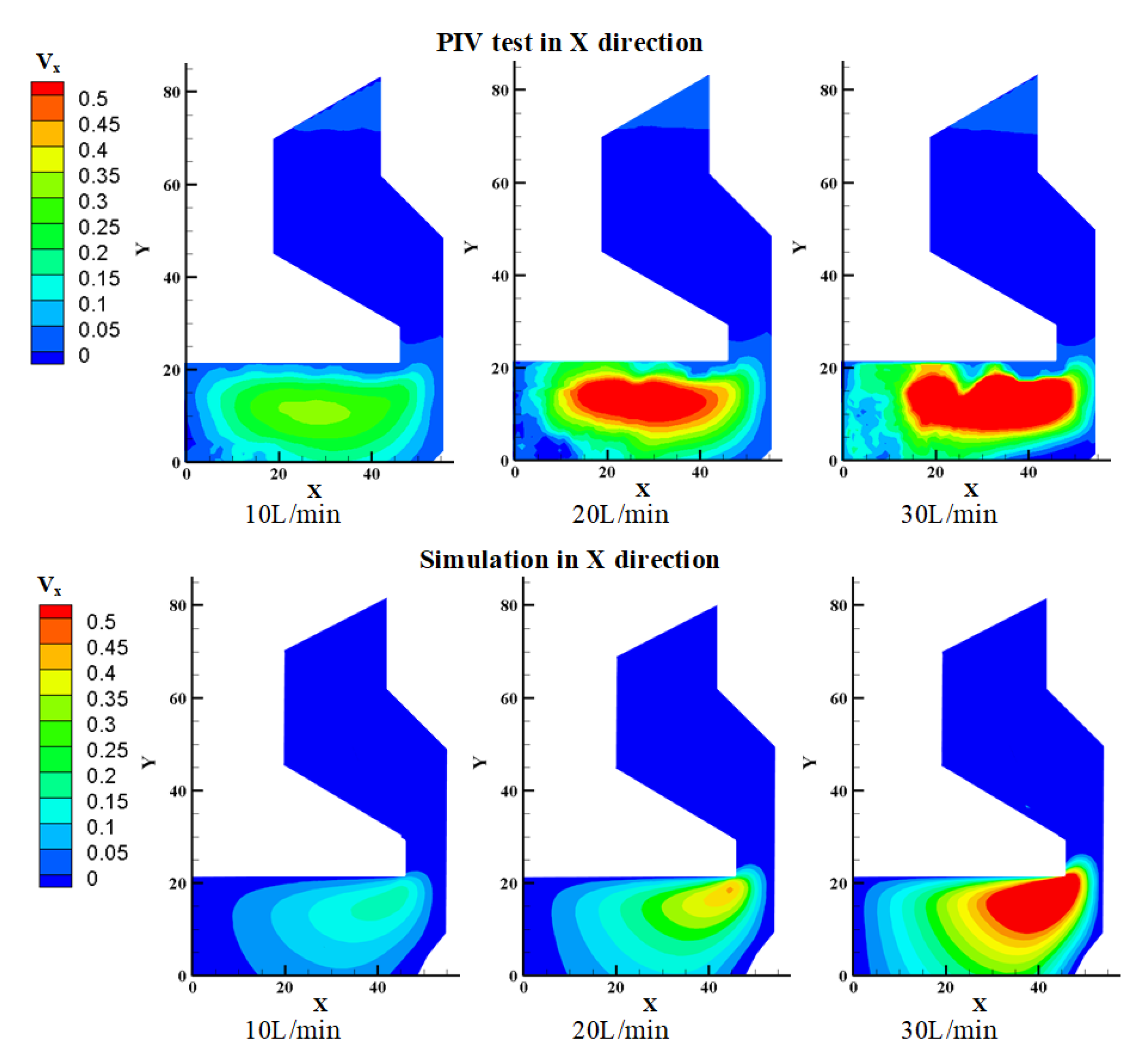
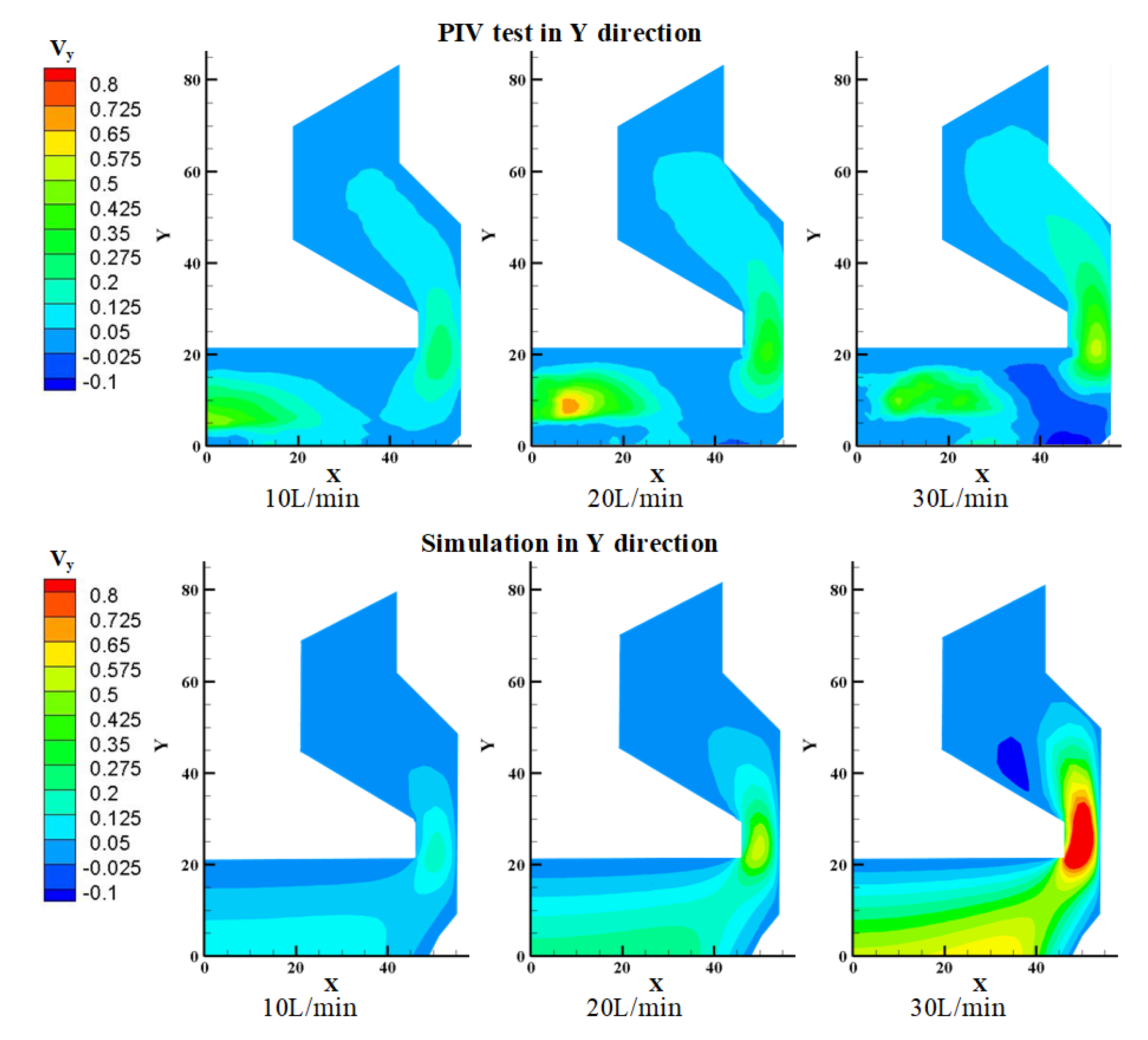
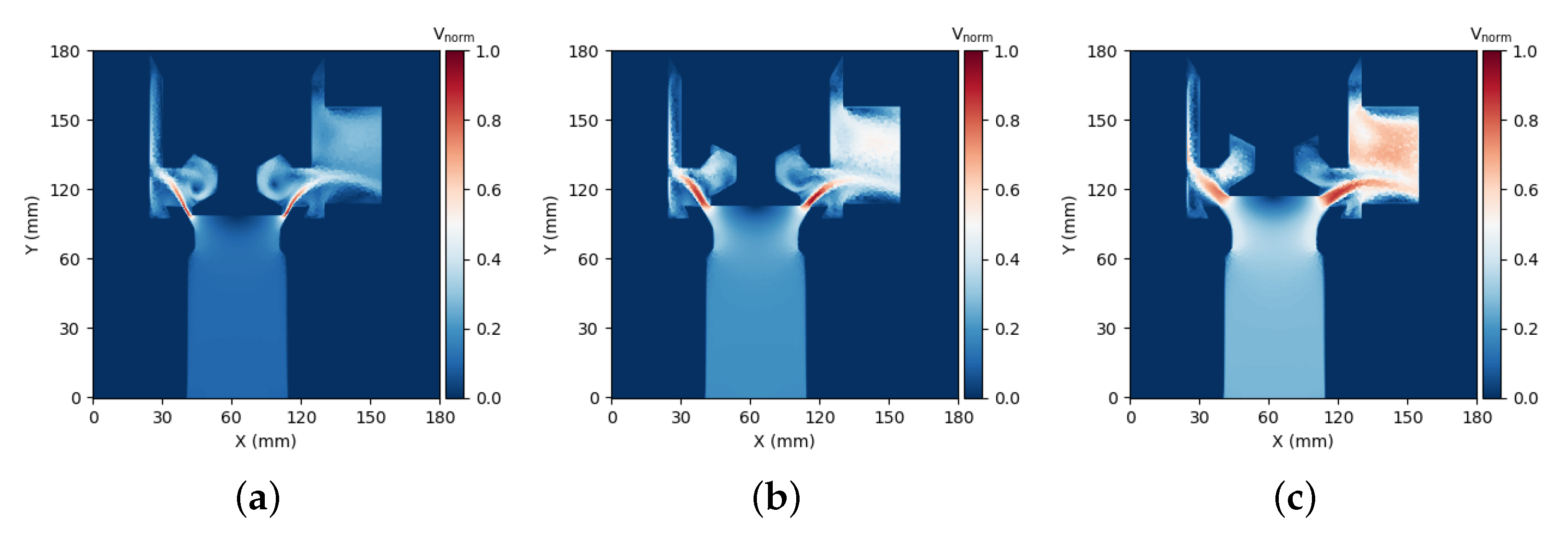
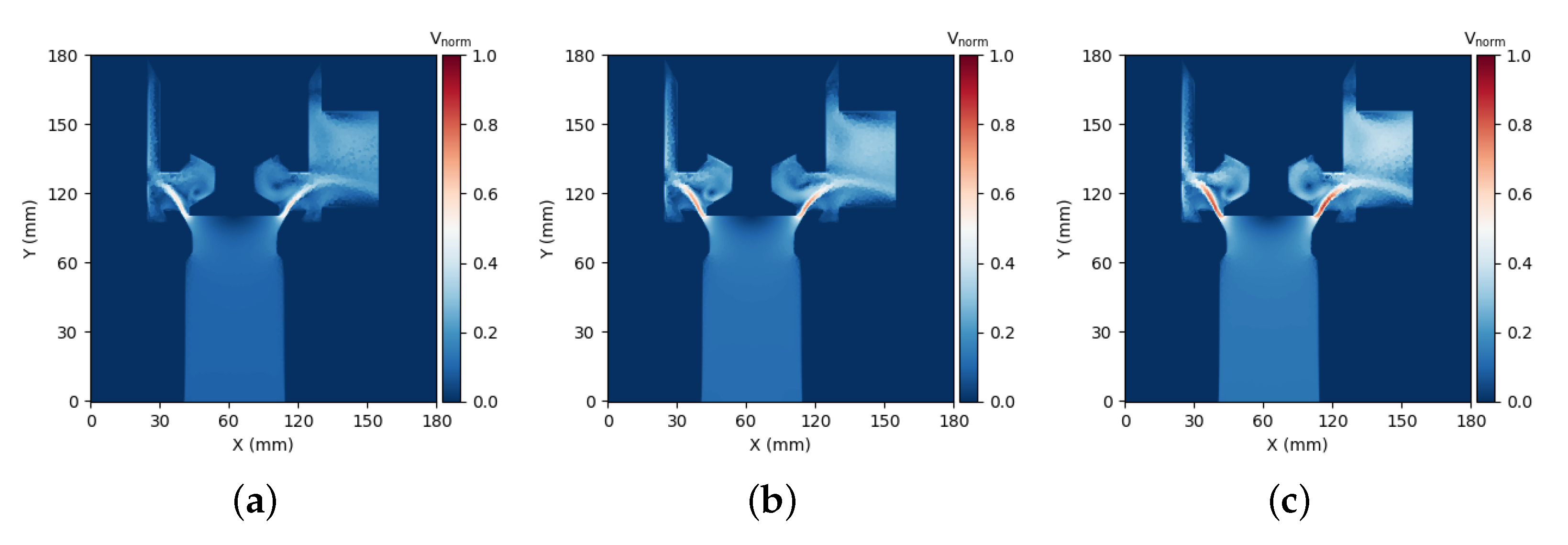
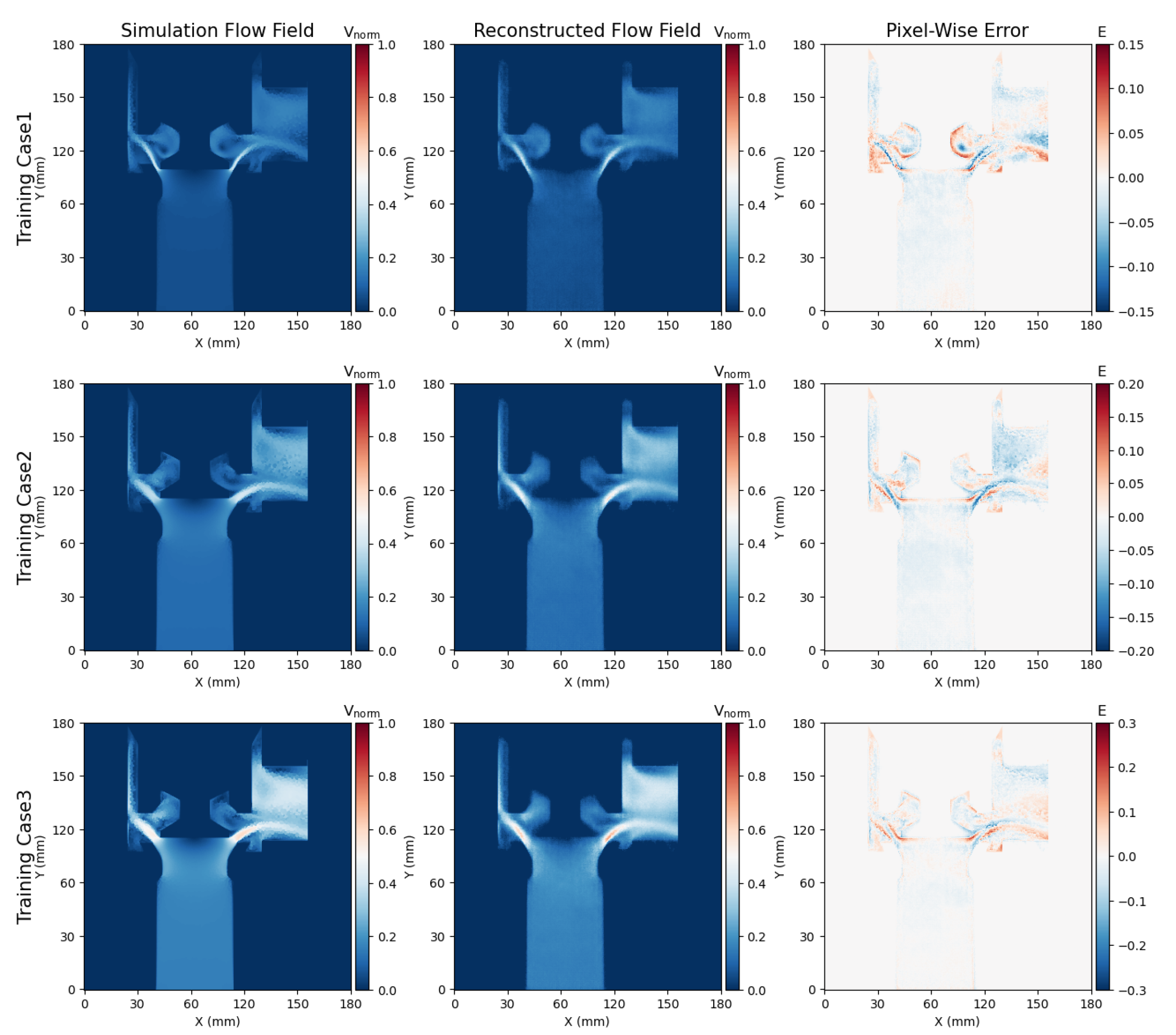
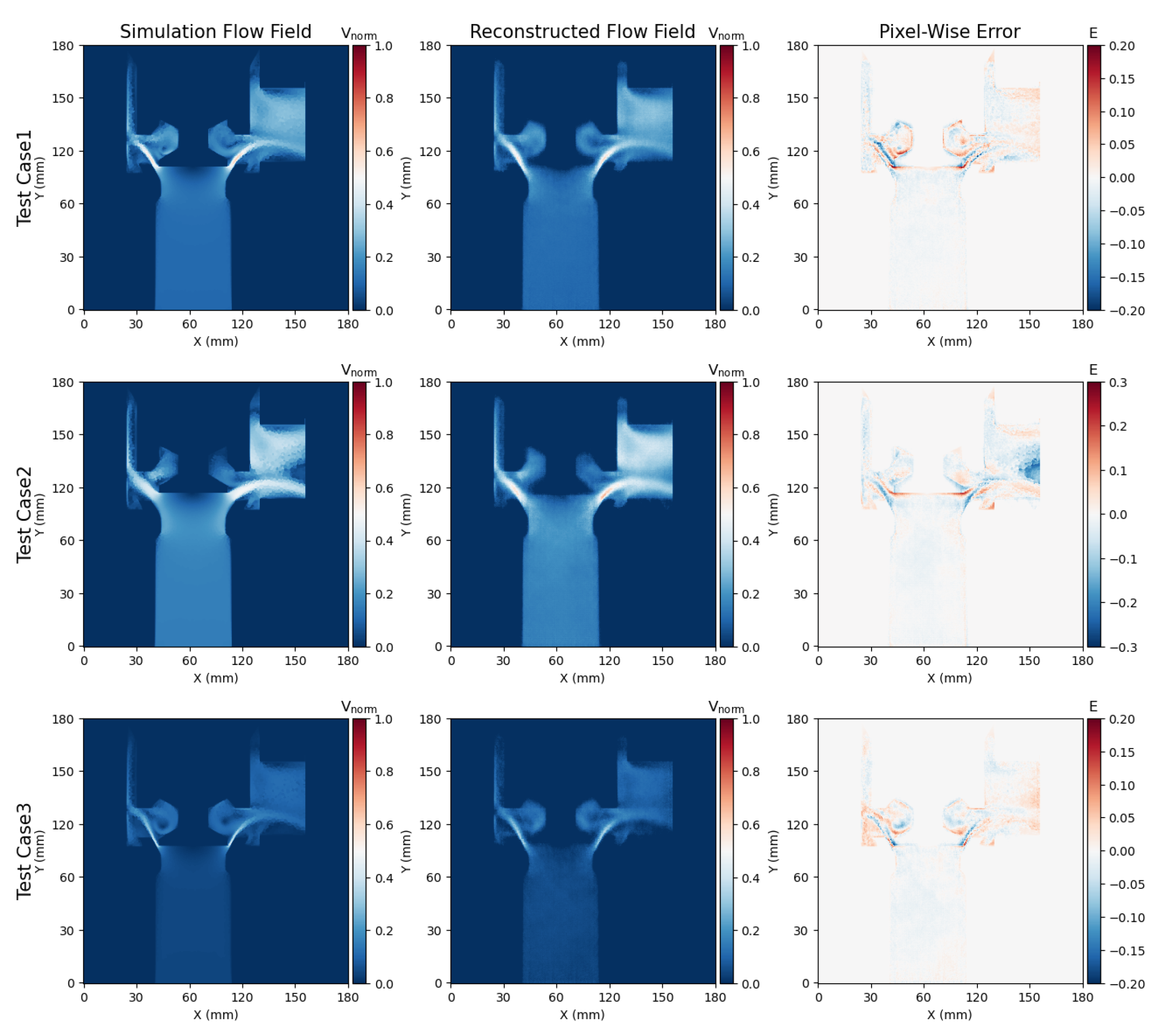
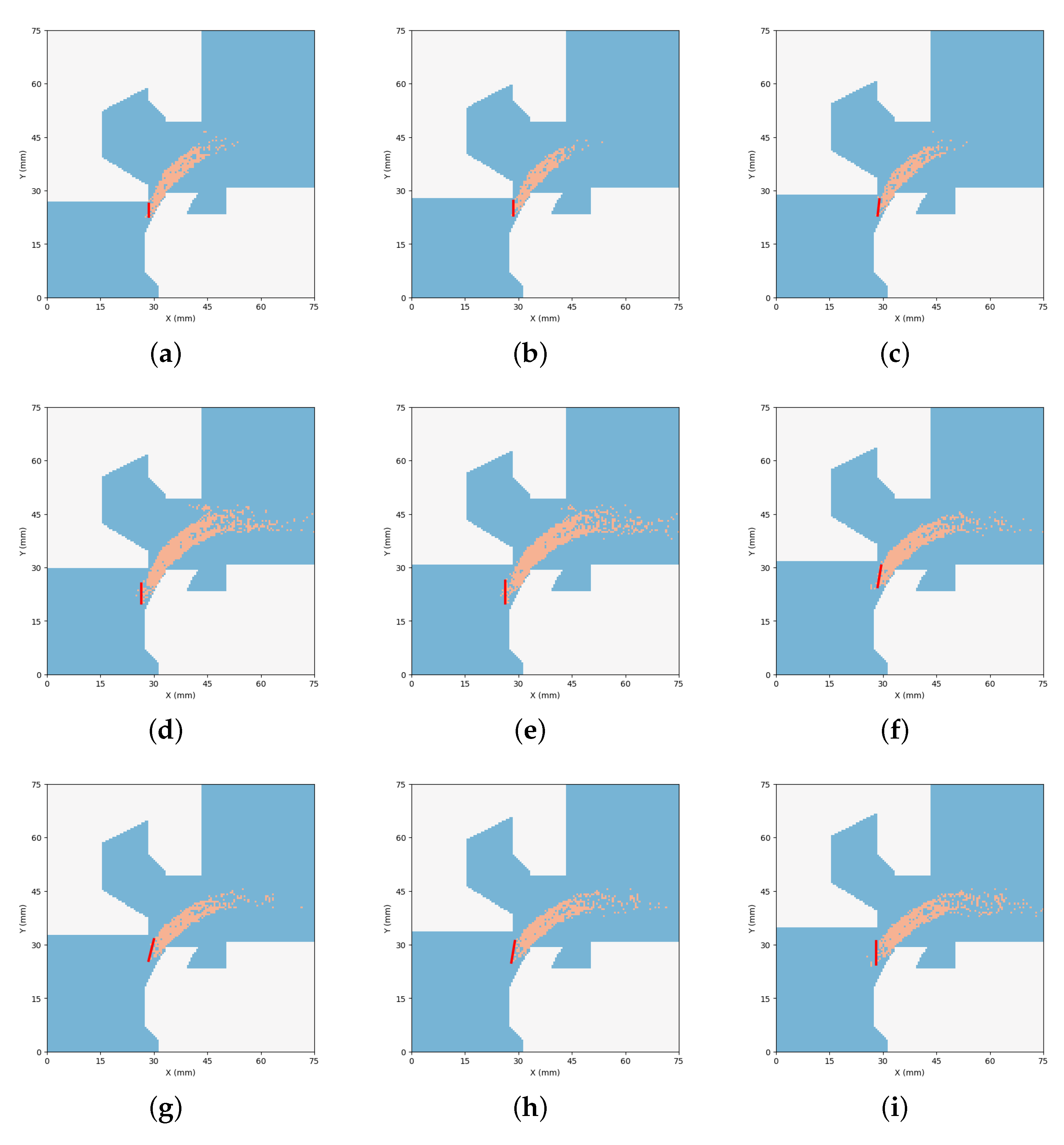
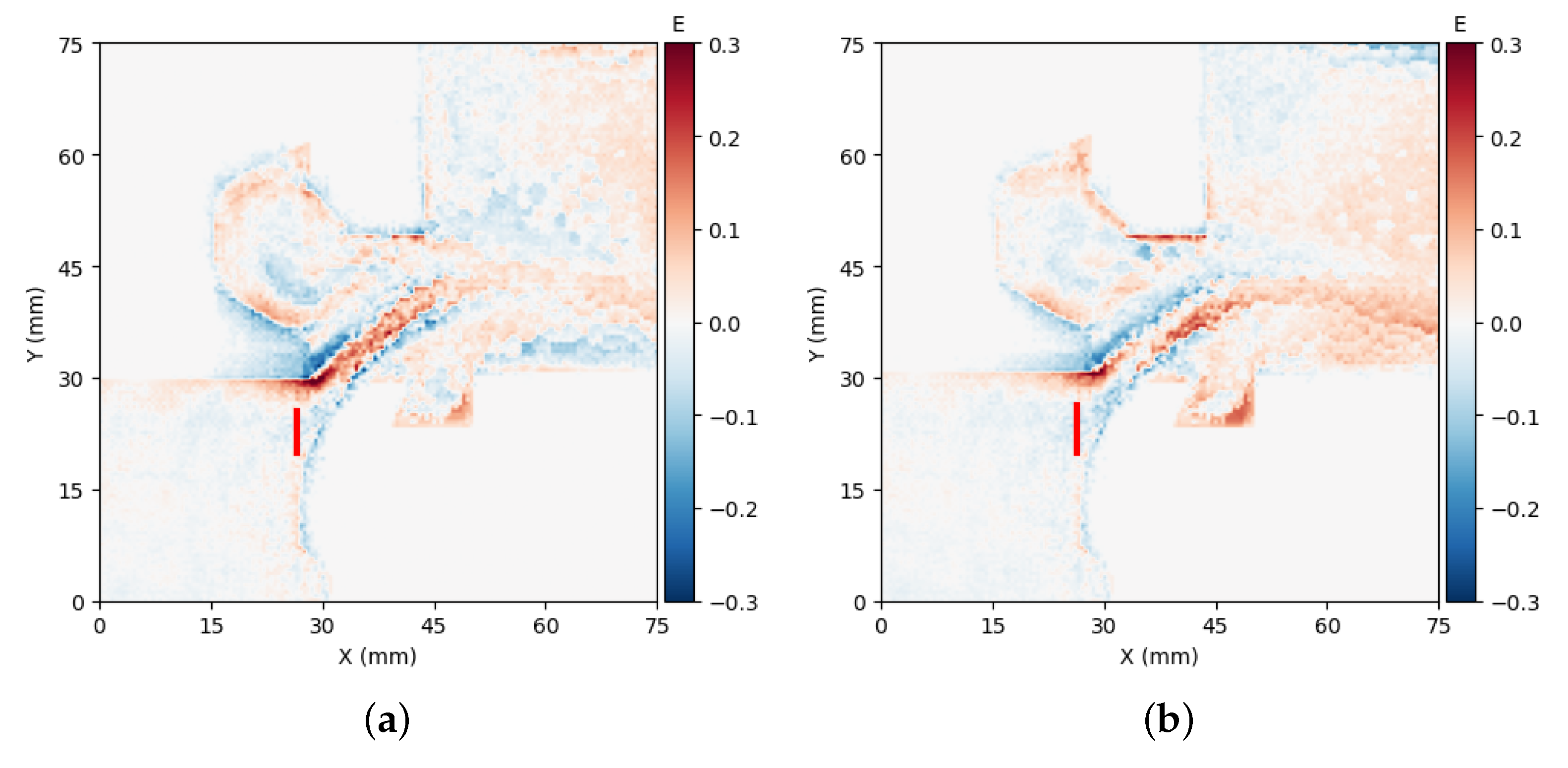
3. Velocity Field Reconstruction
3.1. Simulation-Driven Dataset
3.2. Results Analysis
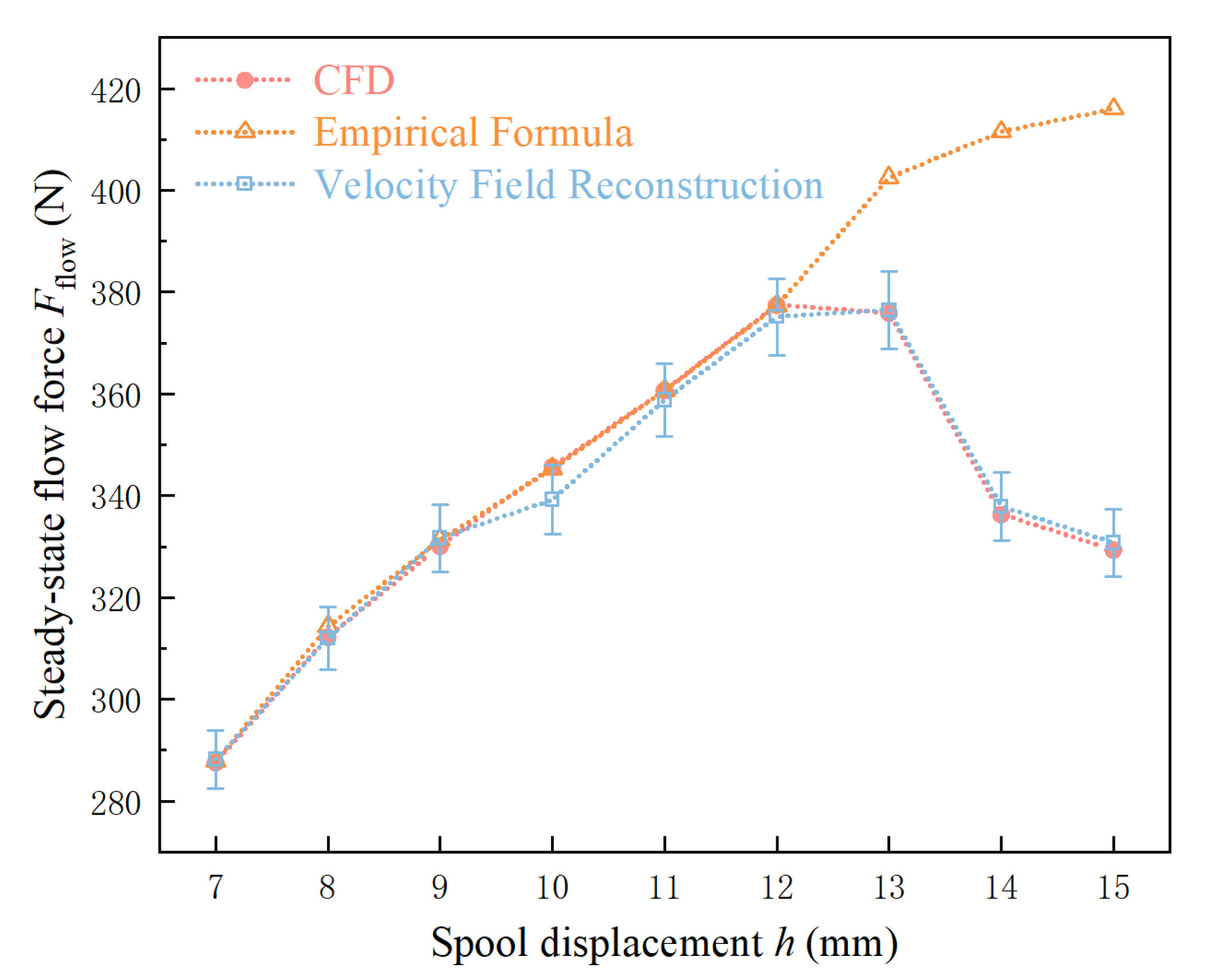
4. Steady-State Flow Force Calculation
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, X.; Wei, W.; Mu, H.; Liu, X.; Wang, Z.; Yan, Q. Numerical Investigation and Experimental Verification of the Fluid Cooling Process of Typical Stator–Rotor Machinery with a Plate-Type Heat Exchanger. Machines 2022, 10, 887. [Google Scholar] [CrossRef]
- Al-Obaidi, A.R. Analysis of the effect of various impeller blade angles on characteristic of the axial pump with pressure fluctuations based on time-and frequency-domain investigations. Iran. J. Sci. Technol. Trans. Mech. Eng. 2021, 45, 441–459. [Google Scholar] [CrossRef]
- Li, X.S.; Wu, Q.T.; Miao, L.Y.; Yak, Y.Y.; Liu, C.B. Scale-resolving simulations and investigations of the flow in a hydraulic retarder considering cavitation. J. Zhejiang-Univ.-Sci. A 2020, 21, 817–833. [Google Scholar] [CrossRef]
- Al-Obaidi, A.R. Influence of guide vanes on the flow fields and performance of axial pump under unsteady flow conditions: Numerical study. J. Mech. Eng. Sci. 2020, 14, 6570–6593. [Google Scholar] [CrossRef]
- Chen, H.; Deng, K.; Li, R. Utilization of machine learning technology in aerodynamic optimization. Acta Aeronaut. Astronaut. Sin. 2019, 40, 17. [Google Scholar]
- Najafzadeh, M.; Tafarojnoruz, A. Evaluation of neuro-fuzzy GMDH-based particle swarm optimization to predict longitudinal dispersion coefficient in rivers. Environ. Earth Sci. 2016, 75, 1–12. [Google Scholar] [CrossRef]
- Bezerra, M.A.; Santelli, R.E.; Oliveira, E.P.; Villar, L.S.; Escaleira, L.A. Response surface methodology (RSM) as a tool for optimization in analytical chemistry. Talanta 2008, 76, 965–977. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, L.; Dempster, W.; Yu, X.; Jia, J.; Tu, S.T. Prediction of blowdown of a pressure relief valve using response surface methodology and CFD techniques. Appl. Therm. Eng. 2018, 133, 713–726. [Google Scholar] [CrossRef]
- Yang, K.; Liu, C.; Wu, Q.; Li, X. Multi-objective optimization design for a hydrodynamic retarder based on CFD simulation considering cavitation effect. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 1443–1460. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks and Learning Machines, 3/E; Pearson Education India: Mumbai, India, 2009. [Google Scholar]
- Hart-Rawung, T.; Buhl, J.; Bambach, M. A fast approach for optimization of hot stamping based on machine learning of phase transformation kinetics. Procedia Manuf. 2020, 47, 707–712. [Google Scholar] [CrossRef]
- Apacoglu, B.; Paksoy, A.; Aradag, S. CFD analysis and reduced order modeling of uncontrolled and controlled laminar flow over a circular cylinder. Eng. Appl. Comput. Fluid Mech. 2011, 5, 67–82. [Google Scholar] [CrossRef]
- Kong, L.; Wei, W.; Yan, Q. Application of flow field decomposition and reconstruction in studying and modeling the characteristics of a cartridge valve. Eng. Appl. Comput. Fluid Mech. 2018, 12, 385–396. [Google Scholar] [CrossRef]
- Wang, P.; Ma, H.; Liu, Y. Unsteady behaviors of steam flow in a control valve with T-junction discharge under the choked condition: Detached eddy simulation and proper orthogonal decomposition. J. Fluids Eng. 2018, 140, 081104. [Google Scholar] [CrossRef]
- Abreu, L.I.; Cavalieri, A.V.; Schlatter, P.; Vinuesa, R.; Henningson, D.S. Spectral proper orthogonal decomposition and resolvent analysis of near-wall coherent structures in turbulent pipe flows. J. Fluid Mech. 2020, 900, A11. [Google Scholar] [CrossRef]
- Calzolari, G.; Liu, W. Deep learning to replace, improve, or aid CFD analysis in built environment applications: A review. Build. Environ. 2021, 206, 108315. [Google Scholar] [CrossRef]
- Ribeiro, M.D.; Rehman, A.; Ahmed, S.; Dengel, A. DeepCFD: Efficient steady-state laminar flow approximation with deep convolutional neural networks. arXiv 2020, arXiv:2004.08826. [Google Scholar]
- Obiols-Sales, O.; Vishnu, A.; Malaya, N.; Chandramowliswharan, A. CFDNet: A deep learning-based accelerator for fluid simulations. In Proceedings of the 34th ACM International Conference on Supercomputing, Barcelona, Spain, 29 June–2 July 2020; pp. 1–12. [Google Scholar]
- Sekar, V.; Zhang, M.; Shu, C.; Khoo, B.C. Inverse design of airfoil using a deep convolutional neural network. AIAA J. 2019, 57, 993–1003. [Google Scholar] [CrossRef]
- Thuerey, N.; Weißenow, K.; Prantl, L.; Hu, X. Deep learning methods for Reynolds-averaged Navier–Stokes simulations of airfoil flows. AIAA J. 2020, 58, 25–36. [Google Scholar] [CrossRef]
- Guo, X.; Li, W.; Iorio, F. Convolutional neural networks for steady flow approximation. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 481–490. [Google Scholar]
- Jiang, H.; Nie, Z.; Yeo, R.; Farimani, A.B.; Kara, L.B. Stressgan: A generative deep learning model for two-dimensional stress distribution prediction. J. Appl. Mech. 2021, 88, 051005. [Google Scholar] [CrossRef]
- Attar, H.; Zhou, H.; Li, N. Deformation and thinning field prediction for HFQ® formed panel components using convolutional neural networks. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Sanya, China, 12–14 November 2021; Volume 1157, p. 012079. [Google Scholar]
- Wang, Z.; Wei, W.; Langari, R.; Zhang, Q.; Yan, Q. A prediction model based on artificial neural network for the temperature performance of a hydrodynamic retarder in constant-torque braking process. IEEE Access 2021, 9, 24872–24883. [Google Scholar] [CrossRef]
- Al-Obaidi, A.R.; Mohammed, A.A. Numerical Investigations of Transient Flow Characteristic in Axial Flow Pump and Pressure Fluctuation Analysis Based on the CFD Technique. J. Eng. Sci. Technol. Rev. 2019, 12, 70–79. [Google Scholar] [CrossRef]
- Aloui, F.; Berrich, E.; Pierrat, D. Experimental and numerical investigations of a turbulent flow behavior in isolated and nonisolated conical diffusers. J. Fluids Eng. 2011, 133, 011201. [Google Scholar] [CrossRef]
- Wu, D.; Wu, P.; Li, Z.; Wang, L. The transient flow in a centrifugal pump during the discharge valve rapid opening process. Nucl. Eng. Des. 2010, 240, 4061–4068. [Google Scholar] [CrossRef]
- Weisstein, E.W. Correlation Coefficient. 2006. Available online: https://mathworld.wolfram.com/ (accessed on 1 February 2023).
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences; Routledge: London, UK, 2013. [Google Scholar]
- Lee, S.; You, D. Data-driven prediction of unsteady flow over a circular cylinder using deep learning. J. Fluid Mech. 2019, 879, 217–254. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; pp. 234–241, Proceedings, Part III 18. [Google Scholar]
- Nie, Z.; Lin, T.; Jiang, H.; Kara, L.B. Topologygan: Topology optimization using generative adversarial networks based on physical fields over the initial domain. J. Mech. Des. 2021, 143, 031715. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, Q.; Nie, Z.; Li, N. A study on using image-based machine learning methods to develop surrogate models of stamp forming simulations. J. Manuf. Sci. Eng. 2022, 144, 021012. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Najafzadeh, M.; Tafarojnoruz, A.; Lim, S.Y. Prediction of local scour depth downstream of sluice gates using data-driven models. ISH J. Hydraul. Eng. 2017, 23, 195–202. [Google Scholar] [CrossRef]
- Najafzadeh, M.; Rezaie-Balf, M.; Tafarojnoruz, A. Prediction of riprap stone size under overtopping flow using data-driven models. Int. J. River Basin Manag. 2018, 16, 505–512. [Google Scholar] [CrossRef]
- Wang, T.; Cai, M.; Kawashima, K.; Kagawa, T. Modelling of a nozzle-flapper type pneumatic servo valve including the influence of flow force. Int. J. Fluid Power 2005, 6, 33–43. [Google Scholar] [CrossRef]
- Zhou, H.; Attar, H.R.; Pan, Y.; Li, X.; Childs, P.R.; Li, N. On the feasibility of small-data learning in simulation-driven engineering tasks with known mechanisms and effective data representations. In Proceedings of the NeurIPS 2021 AI for Science Workshop, Vancouver, BC, Canada, 13 December 2021. [Google Scholar]
- Ramadhan Al-Obaidi, A. Numerical investigation of flow field behaviour and pressure fluctuations within an axial flow pump under transient flow pattern based on CFD analysis method. In Proceedings of the Journal of Physics: Conference Series, Thi-Qar, Iraq, 30–31 March 2019; Volume 1279, p. 012069. [Google Scholar]
- Hou, J.; Li, S.; Pan, W.; Yang, L. Co-Simulation Modeling and Multi-Objective Optimization of Dynamic Characteristics of Flow Balancing Valve. Machines 2023, 11, 337. [Google Scholar] [CrossRef]
- Wu, D.; Wang, X.; Ma, Y.; Wang, J.; Tang, M.; Liu, Y. Research on the dynamic characteristics of water hydraulic servo valves considering the influence of steady flow force. Flow Meas. Instrum. 2021, 80, 101966. [Google Scholar] [CrossRef]
- YUAN, Q.; LI, P.Y. Using steady flow force for unstable valve design: Modeling and experiments. J. Dyn. Syst. Meas. Control. 2005, 127, 451–462. [Google Scholar] [CrossRef]
- Zhu, M.; Zhao, S.; Li, J.; Dong, P. Computational fluid dynamics and experimental analysis on flow rate and torques of a servo direct drive rotary control valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 213–226. [Google Scholar] [CrossRef]
- Wang, X.; Shen, Z.; Man, G.; Liu, H.; Wang, X. Study on hydrodynamic numerical simulation and radical offset characteristics of outflow cone valve. J. Eng. 2019, 2019, 231–237. [Google Scholar] [CrossRef]
- Wu, D.; Burton, R.; Schoenau, G. An empirical discharge coefficient model for orifice flow. Int. J. Fluid Power 2002, 3, 13–19. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction | 10 L/min | 20 L/min | 30 L/min |
|---|---|---|---|
| x | 0.67 | 0.60 | 0.73 |
| y | 0.57 | 0.46 | 0.42 |
| No. | Layer | Kernel | Stride | Padding | Function |
|---|---|---|---|---|---|
| 1 | Convolutional layer | 2 | 2 | 0 | Sigmoid |
| 2 | Convolutional layer | 2 | 2 | 0 | ReLU |
| 3 | Convolutional layer | 2 | 2 | 1 | ReLU |
| 4 | Transposed convolutional layer | 3 | 3 | 1 | ReLU |
| 5 | Transposed convolutional layer | 2 | 2 | 0 | ReLU |
| 6 | Transposed convolutional layer | 2 | 2 | 1 | ReLU |
| 7 | Convolutional layer + Batch Normalization | - | - | - | ReLU |
| 8 | Global pooling layer | - | - | - | - |
| 9 | Fully connected layer | - | - | - | ReLU |
| 10 | Fully connected layer | - | - | - | Sigmoid |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, W.; Wang, Y.; Tao, T.; Chen, X.; Hu, N.; Ma, Y.; Yan, Q. A Study on Using Location-Information-Based Flow Field Reconstruction to Model the Characteristics of a Discharging Valve in a Hydrodynamic Retarder. Machines 2023, 11, 460. https://doi.org/10.3390/machines11040460
Wei W, Wang Y, Tao T, Chen X, Hu N, Ma Y, Yan Q. A Study on Using Location-Information-Based Flow Field Reconstruction to Model the Characteristics of a Discharging Valve in a Hydrodynamic Retarder. Machines. 2023; 11(4):460. https://doi.org/10.3390/machines11040460
Chicago/Turabian StyleWei, Wei, Yuze Wang, Tianlang Tao, Xiuqi Chen, Naipeng Hu, Yuanqing Ma, and Qingdong Yan. 2023. "A Study on Using Location-Information-Based Flow Field Reconstruction to Model the Characteristics of a Discharging Valve in a Hydrodynamic Retarder" Machines 11, no. 4: 460. https://doi.org/10.3390/machines11040460
APA StyleWei, W., Wang, Y., Tao, T., Chen, X., Hu, N., Ma, Y., & Yan, Q. (2023). A Study on Using Location-Information-Based Flow Field Reconstruction to Model the Characteristics of a Discharging Valve in a Hydrodynamic Retarder. Machines, 11(4), 460. https://doi.org/10.3390/machines11040460