
The Viability of a Grid of Autonomous Ground-Tethered UAV Platforms in Agricultural Pest Bird Control


Abstract
1. Introduction
2. Simulation Model and Methodology
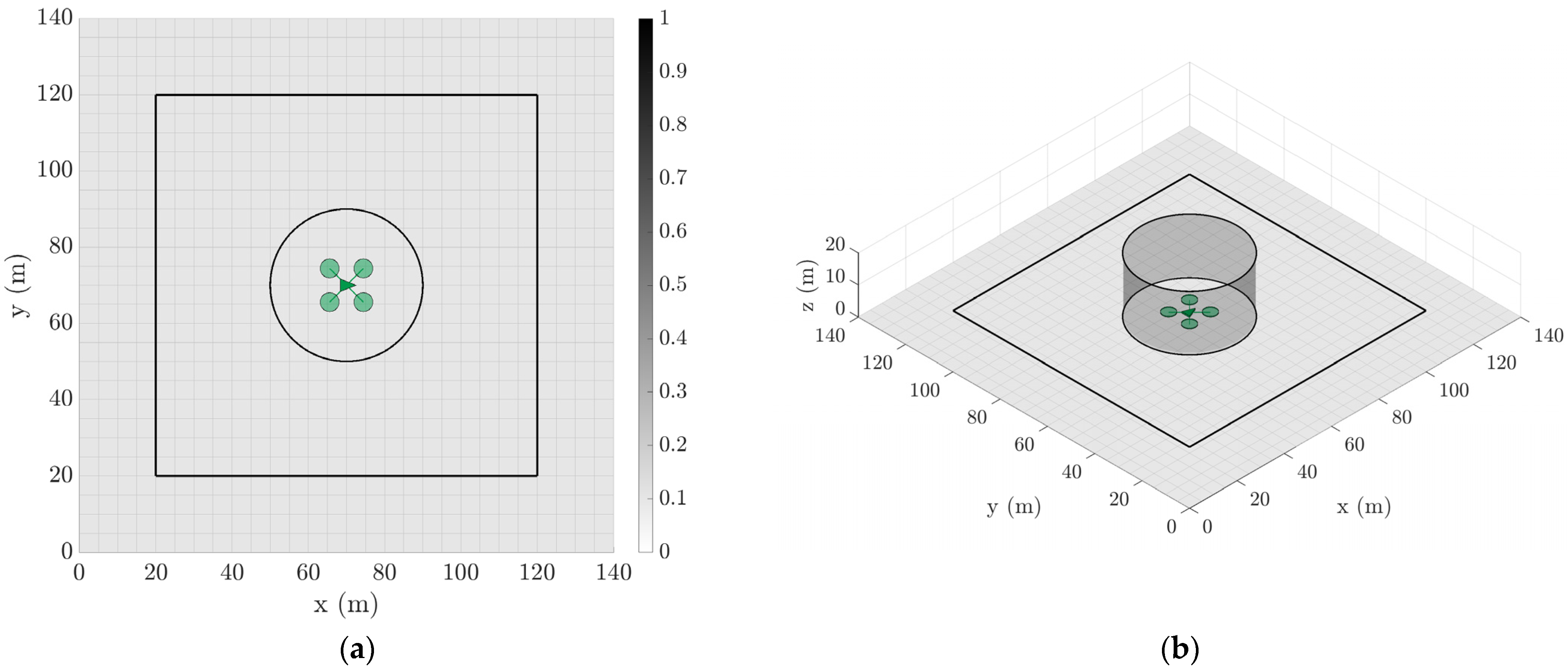
2.1. Property World Set-up
2.2. Tethered UAV Model
2.2.1. UAV Dynamics
2.2.2. Trajectory Planning
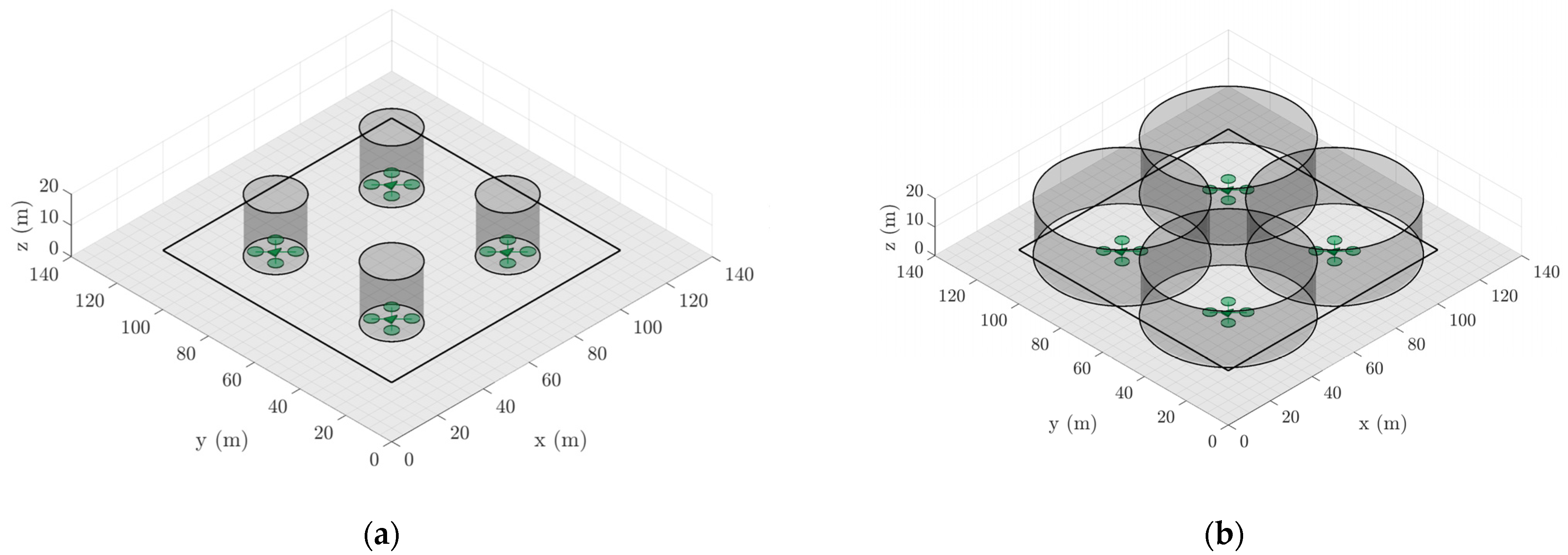
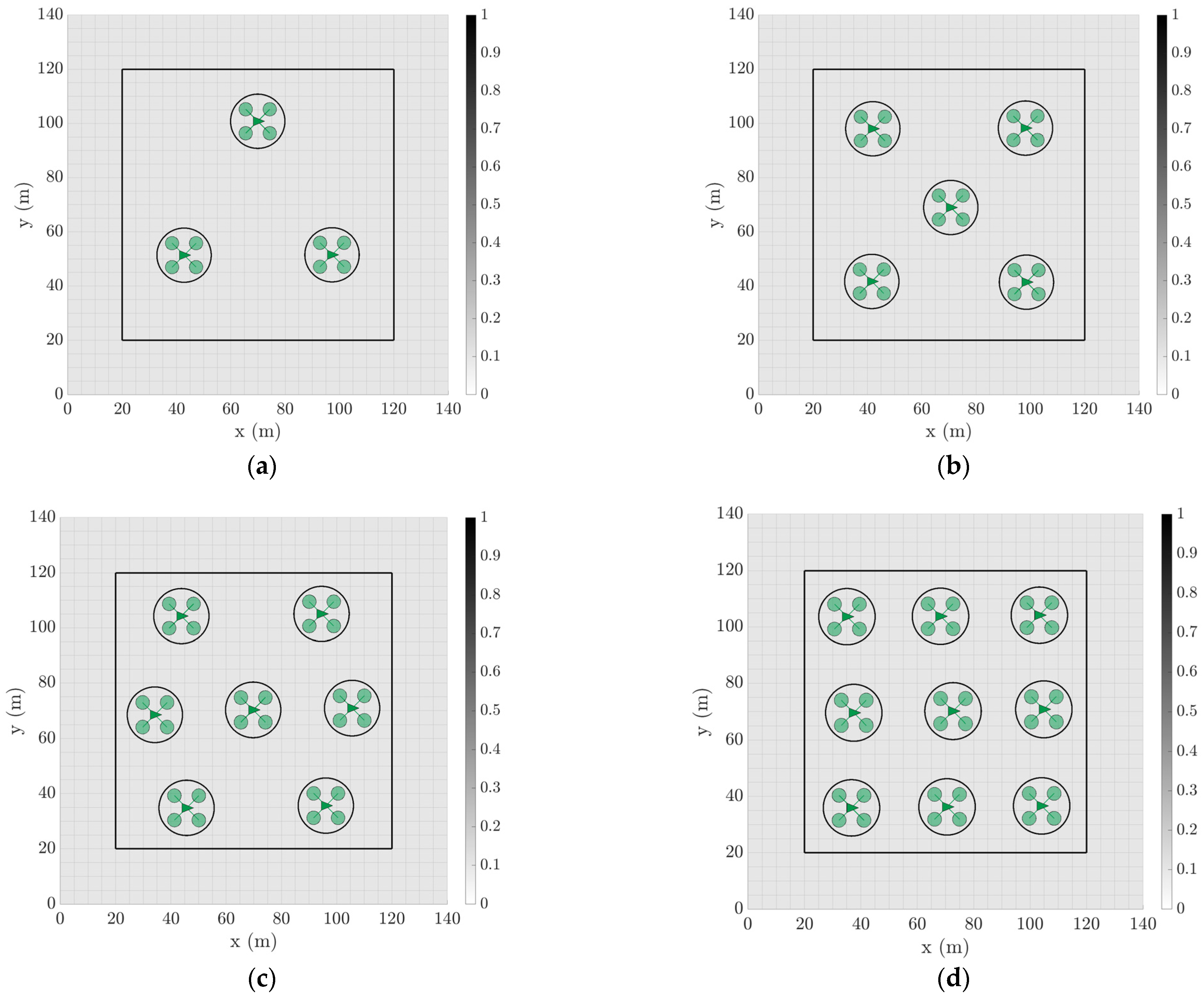
2.2.3. Agent Grid Arrangement
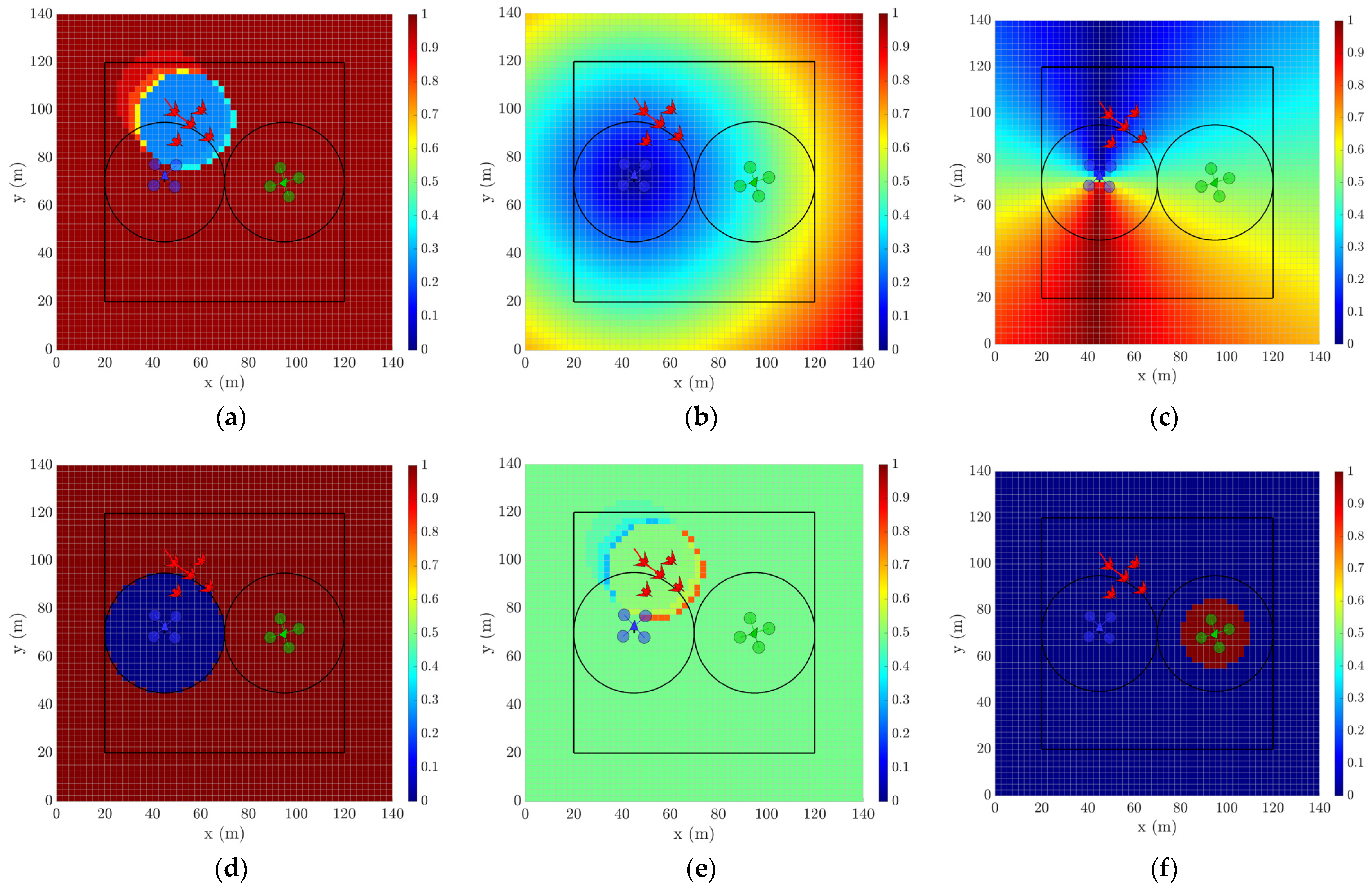
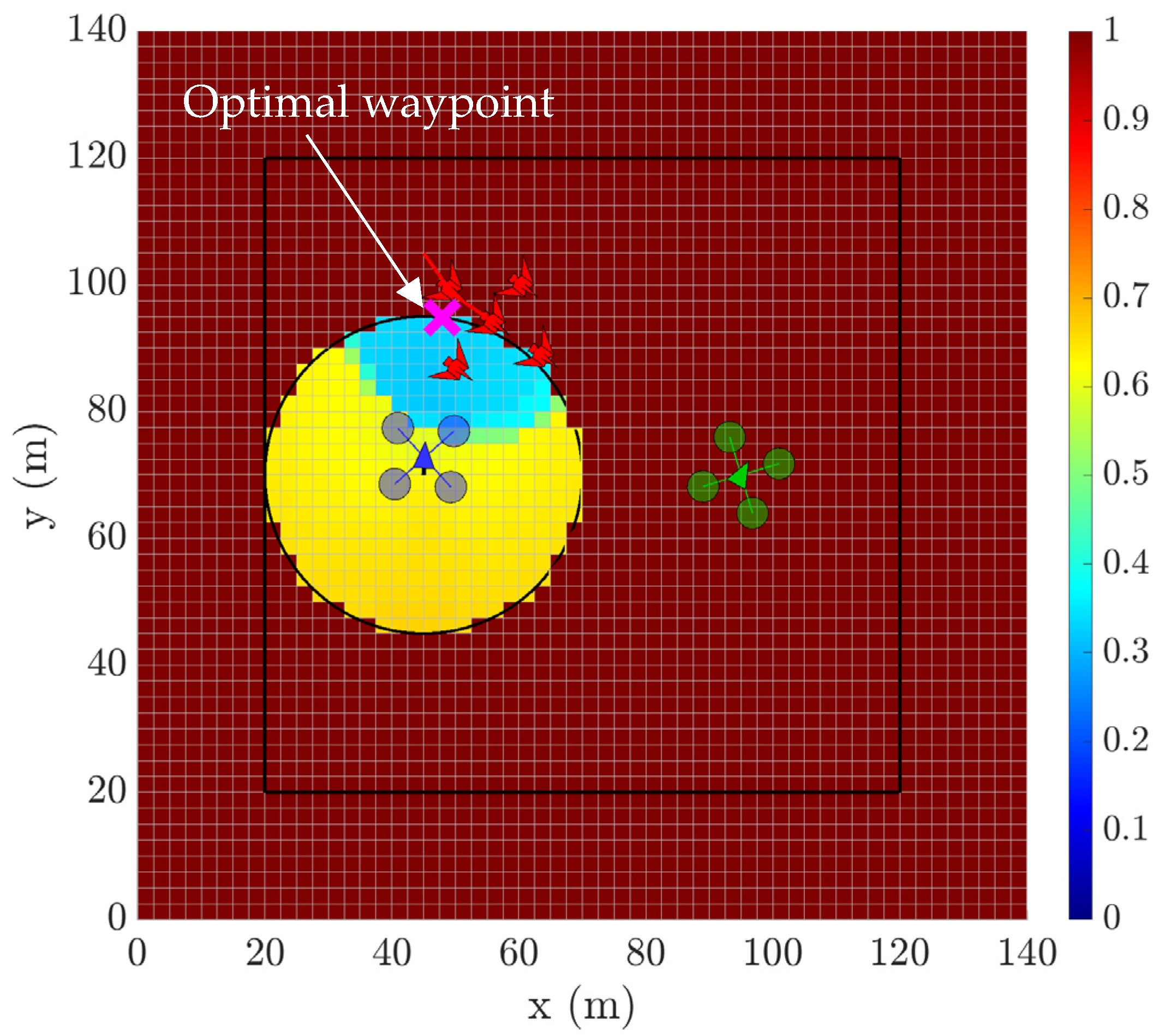
2.2.4. Chasing Strategy and Multiple UAV Coordination
- Chase: the agent is deployed to pursue a target flock which is in range.
- Home: the agent is undeployed and stationed at the ground tether point–this agent state does not scare away target flocks, irrespective of distance.
- Return: the agent is deployed but returning to the ground tether point since the target flock is no longer within scaring range.
- Choose the number of clusters k.
- Initialize centroids through random selection of k data points without replacement.
- Compute the sum of the squared distance between all data points and every centroid.
- Assign each data point to the closest centroid (to form distinct clusters).
- Compute new centroids by taking the average value of data points within each respective cluster.
- Keep iterating on steps 3–5 until converged.
2.3. Target Flock Model
2.3.1. Target Flock Dynamics and Trajectory Planning
2.3.2. Target Flock Energy Expenditure System
- Initial energy expenditure reserve.
- Body mass.
- Basal metabolic rate (BMR).
- Power costs for regular long flights and short burst flights.
2.4. Simulation Testing Plan
Variables of Interest
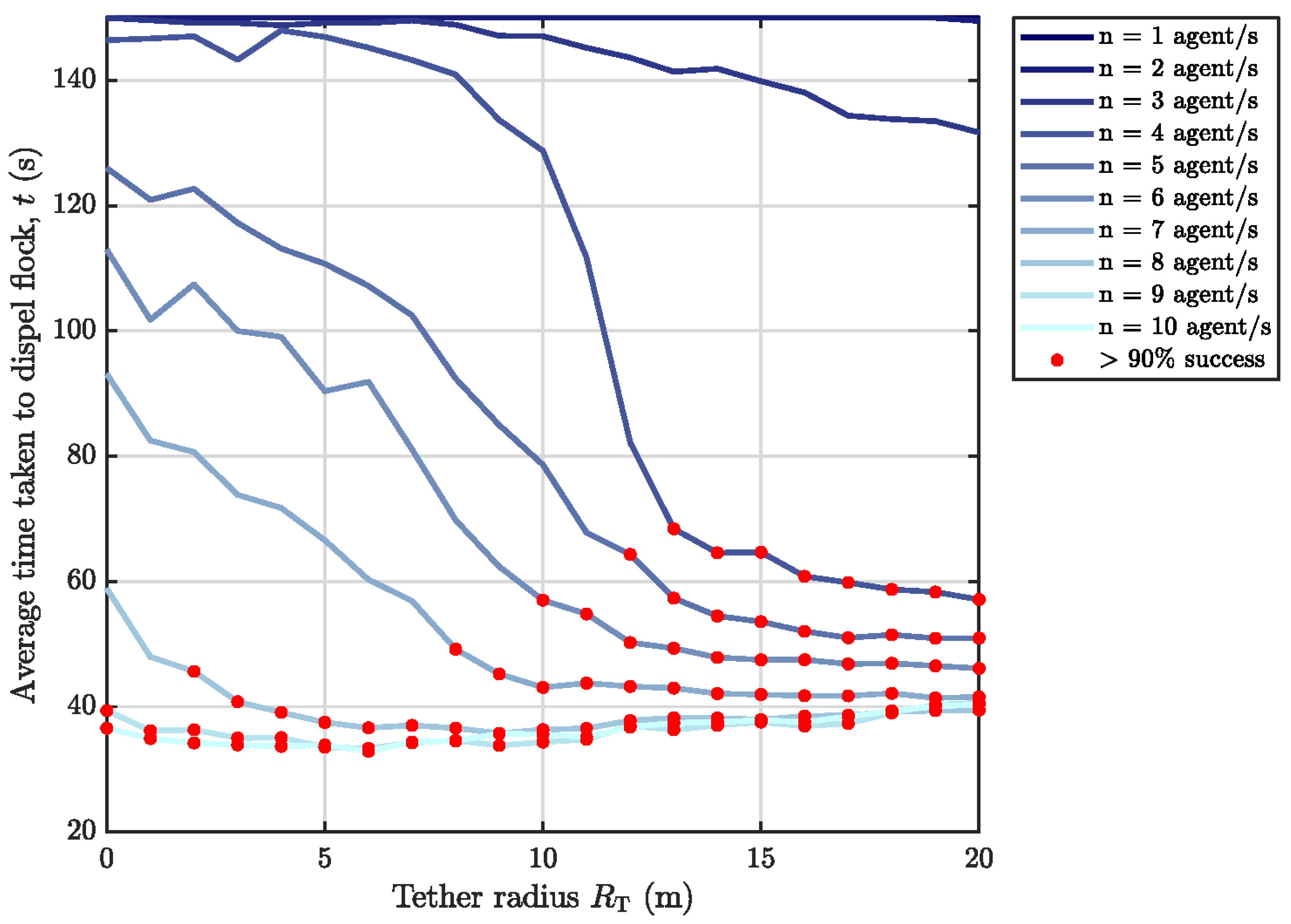
- Time taken to repel a target (if successful).
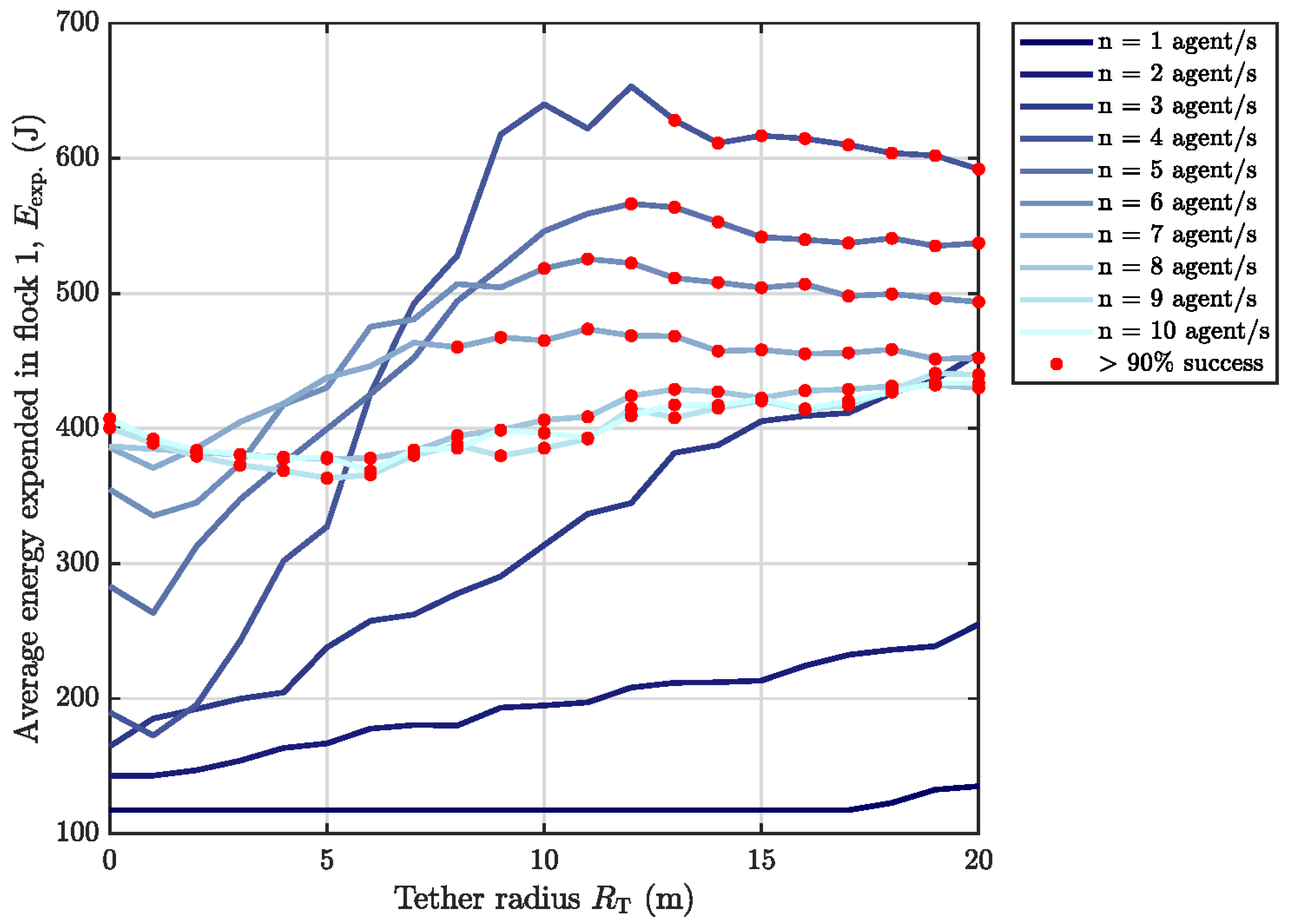
- The energy expended by a given target in a single mission. (Unsuccessful missions are capped at t = 150 s.)
- Number of agents.
- Tether length.
- Maximum agent speed.
- Number of targets.
3. Simulation Results
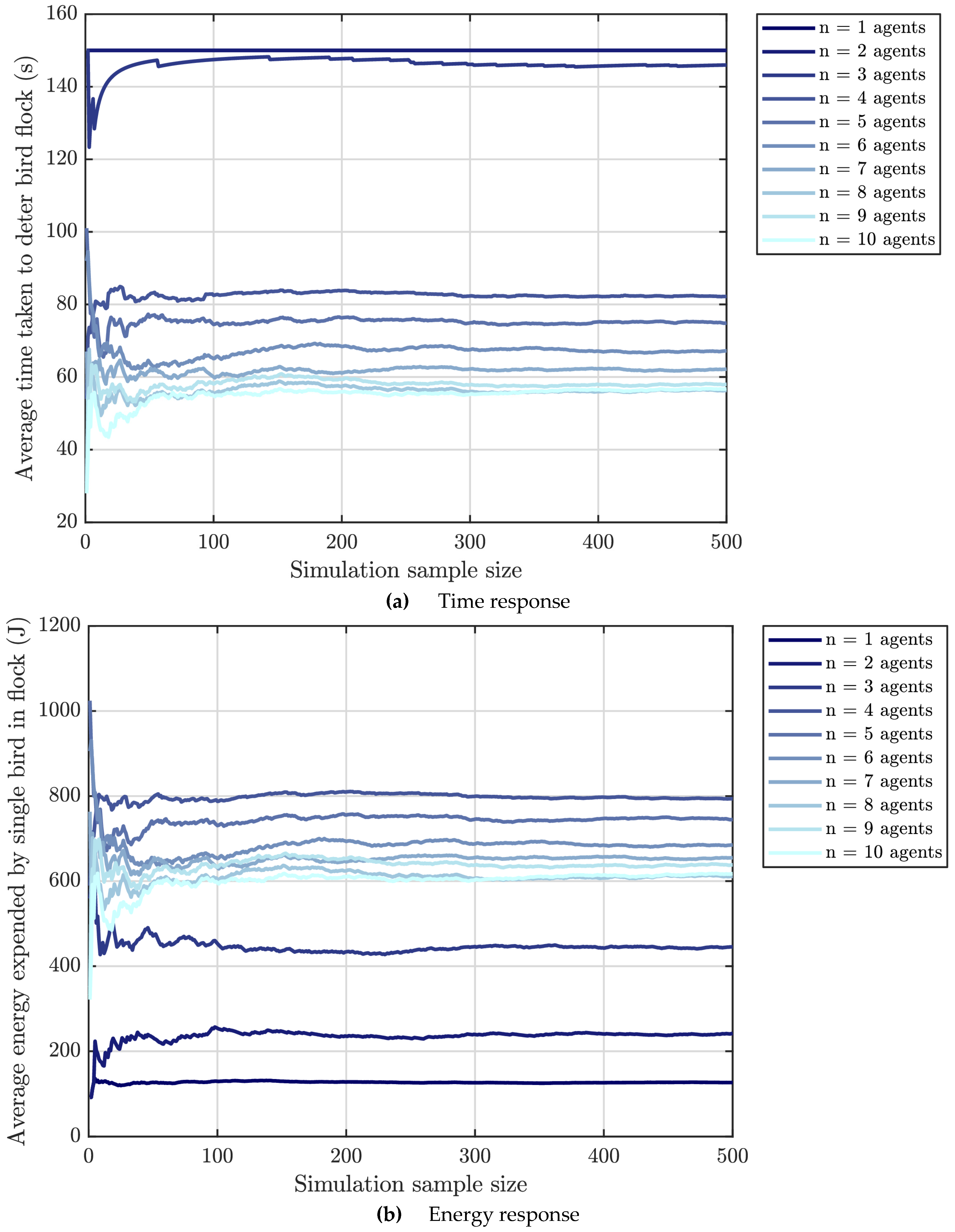
3.1. Simulation Convergence Study
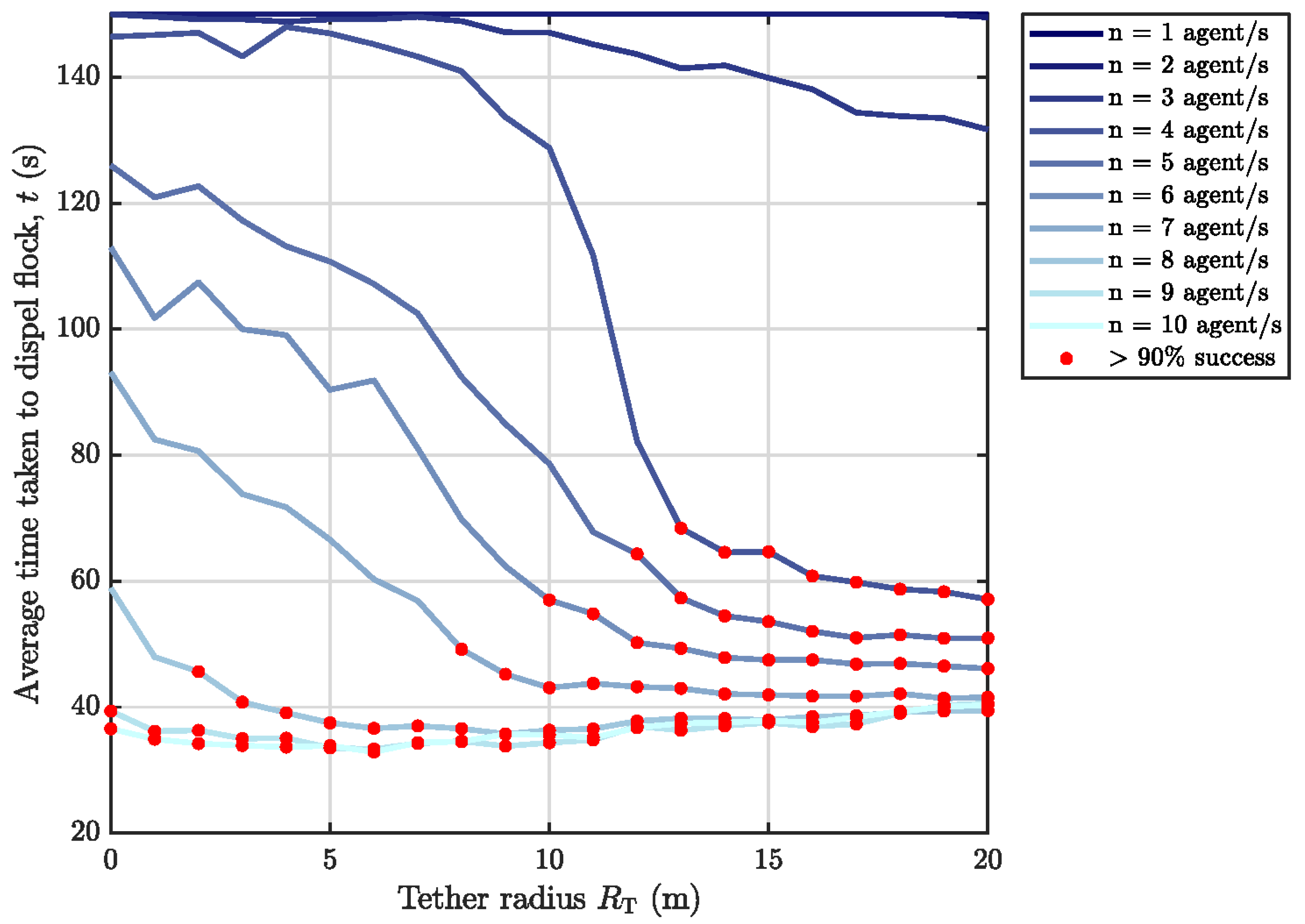
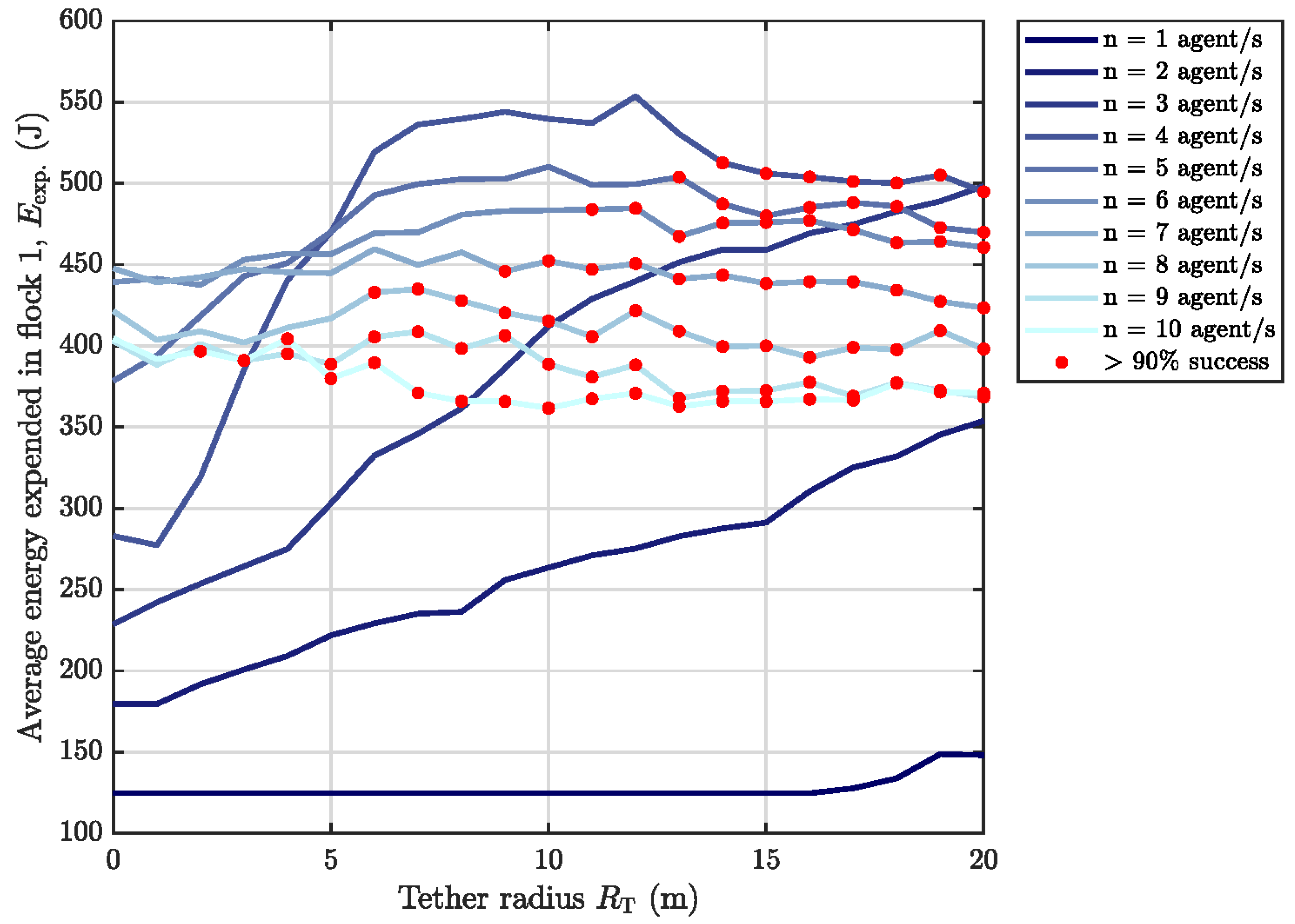
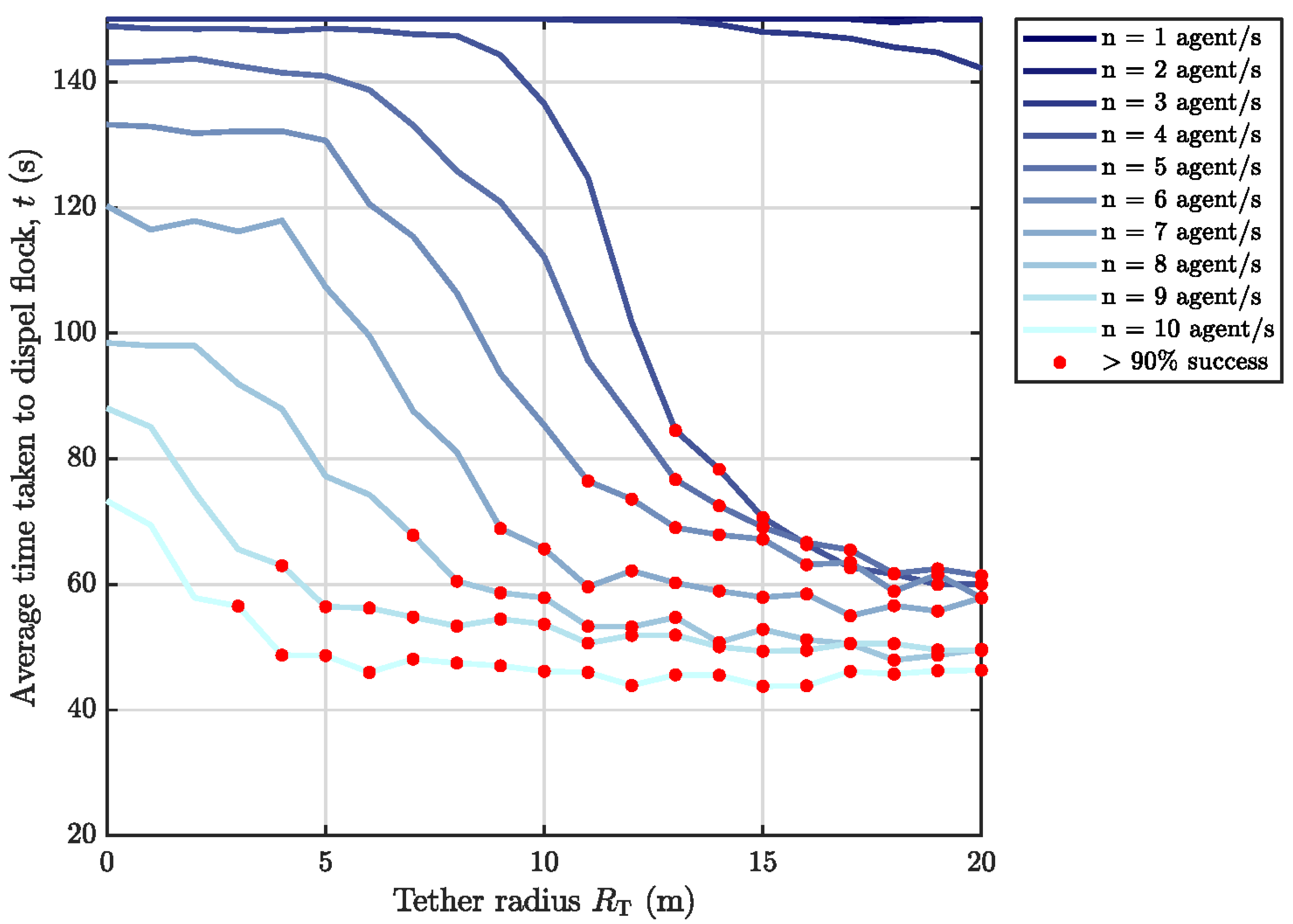
3.2. Single Target Flock Scenarios
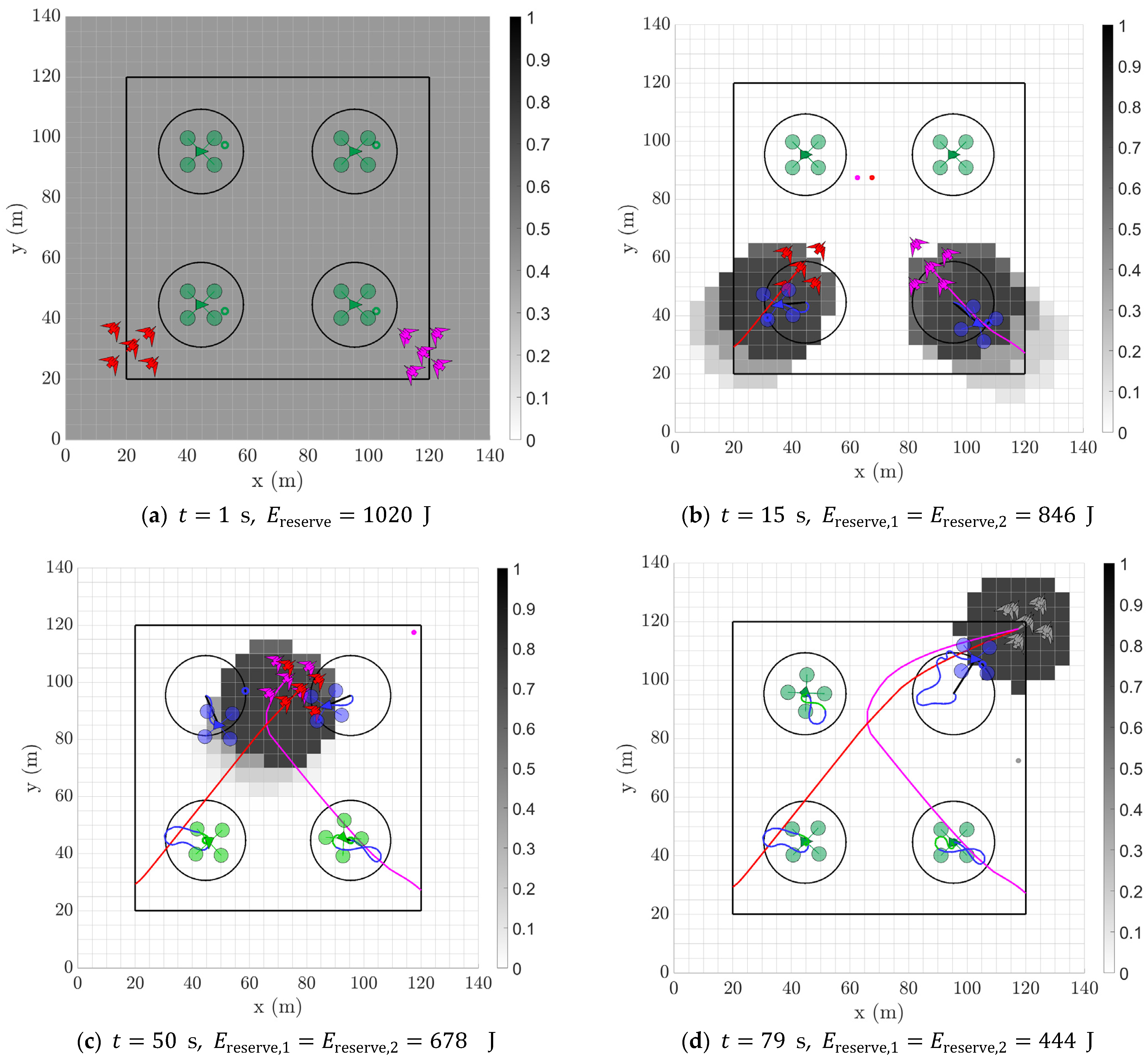
3.3. Multiple Target Scenarios
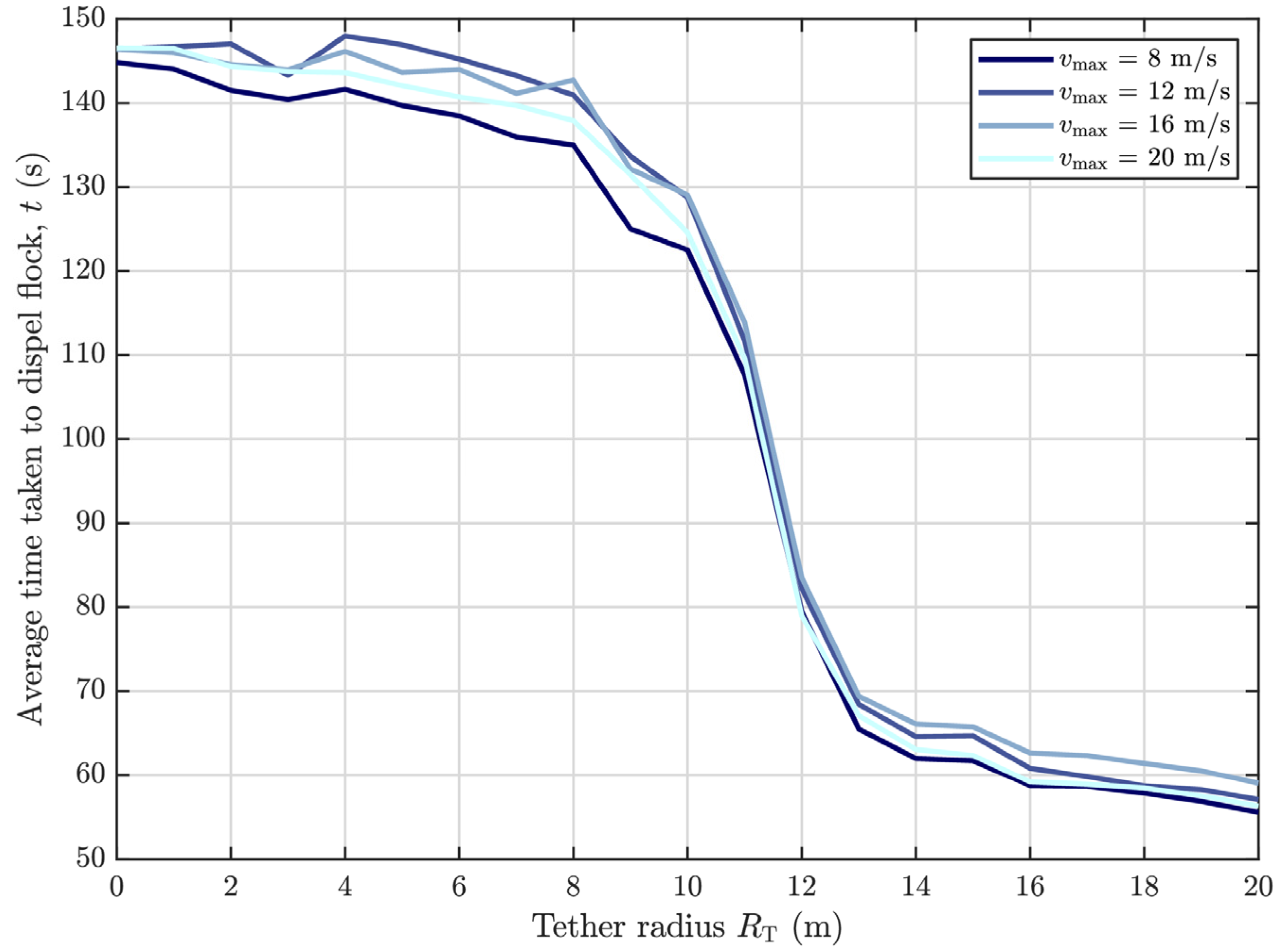
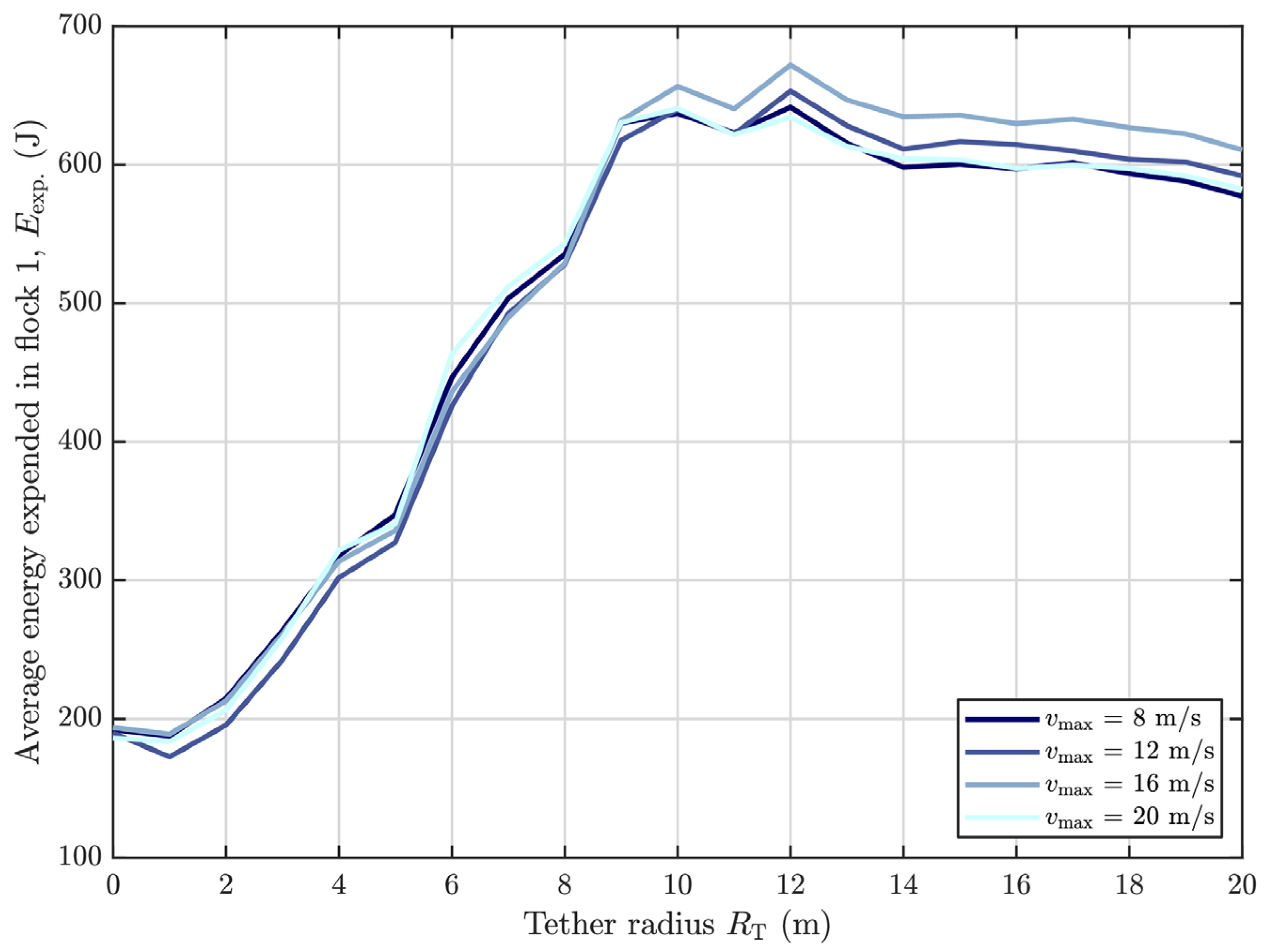
3.4. Testing Agent Maximum Speed
4. Discussion
4.1. Summary and Analysis of Results
4.2. Limitations of the Simulation Model
- Target flock behaviour modelling limitations: as previously discussed, this factor represents the largest limitation. Within the simulation, it is assumed that targets remain within cohesive flocks the entire duration and will predictably flee from a scaring stimulus in the same manner each time and always flee to the most ‘optimal’ cell or spot on the property. Though some of these behaviours are modelled on true bird responses to UAVs in vineyards, it omits other behavioural factors and does not account for the fact that there can be many different bird types and species being deterred on the property at the same time, which in turn can influence decision making on where to forage if target flocks of different species do not want to be near each other. This is a fine approximation for flight initiation distance (FID) considering all bird types in the field experiments of [7] fled at distances of 50 m or greater (except for Silvereyes, which exhibit different foraging behaviours). Instead, it challenges foraging assumptions and the universality of the energy expenditure results since they are solely based on data and estimations for the Common Starling. As discussed in the energy expenditure modelling setup, this is a highly crude model due to the number of assumptions made and the scope in which each metric can vary. Ultimately, the energy model is more useful and accurate as a relative measure for identifying configurations that elicit higher expenditure costs rather than a source of absolute truth for what these expenditure values actually are. Though this simulation does not account for returning target flocks, it is assumed by principles such as optimal foraging theory that target flocks become dissuaded the more energy they expend in searching for food on that property and will thus seek food elsewhere. This can also be beneficial and conservative for the simulation since every target flock enters with full energy reserves as opposed to depleted reserves from previous foraging attempts. A final big limitation of the target flock behaviour modelling is that it does not account for habituation; it assumes that target flocks will respond at the same distance to the scaring stimuli every time, irrespective of exposure history or perceived learning. Though this assumption may be valid for a single foraging mission, it certainly does not hold when the same target flocks are exposed to the same stimuli over periods of time.
- Agent modelling limitations: in terms of agent modelling, there were simplifications in dynamics with the hybrid 2D and 3D approach. A 3D probability map was avoided to reduce significantly higher computational costs for only marginal gains, indicating that the vertical trajectory planning for the agents was constrained to operate between two pre-set heights (the ground and 15 m), with the optimal waypoint calculated by the cost function only carrying relevance in the horizontal plane. Similarly, no dynamic considerations due to tether were modelled; it was assumed that, for the configurations under study, the horizontal offsets from the tether point were sufficiently small to not impact overall dynamics and stability to an appreciable degree, as long as there is an appropriate winch system to maintain sufficient tautness such as seen in the near-horizontal 12 m powered tether used in [13]. This adds greater pressure and motivation for a shorter tether radius, where this assumption becomes increasingly more valid. Another simplification is the assumption that agent arrangement is optimal when they are spaced as far apart from each other as possible with the motivation of maximising property area coverage. This may not be the case since most birds in field trials are observed to enter the property from one of its four sides (as opposed to directly top-down from flight), as confirmed by the higher proportion of bird crop damage normally located along the peripheral zones of the property. Hence, a more optimal configuration may account for this factor and redistribute agents closer to the property boundary accordingly. A further assumption is that the number of target flocks on the property is always known based on ground camera sensor information. The verification of this assumption lies beyond the scope of this paper. It is also important to note that the bird behavioural responses are based on a UAV that is equipped with specialised scaring stimuli (auditory and visual) and not just a regular multirotor. Hence, prototyping of the physical tethered system must incorporate and account for existing scaring stimuli.
- Property modelling limitations: in reality, most crops are not perfect squares in shape, nor are they only 100 m by 100 m in size. This simulation model further reduces the problem to an idealised scenario and assumes that all sections within the property are equally attractive to target flocks, not accounting for topographical variations nor existing pockets of potentially higher or lower foraging interest through higher local crop yields or pre-existing damage, respectively. In reality, the optimal tether radius will also need to be modified and scaled with fields of different sizes since the strategy chosen in this paper will presumably fail for much larger property dimensions.
- Probability map modelling limitations: The probability map model does not evolve in the temporal domain, nor does it vary according to environmental light and weather. At the current stage, there is not enough bird behavioural study related to the foraging activity in vineyards under different weather conditions to enable a more dynamic model. Further investigation is needed to construct a more accurate probability map model.
5. Conclusions and Future Work
5.1. Future Testing
- Autonomous Multi-UAV Coordination Test: evaluate the coordination strategy between multiple drones using real hardware.
- Tethered Drone Dynamics Test: considering that the influence of a tether on the dynamics and stability of a drone was not explicitly modelled in the simulation, it is important to verify that its impact is near-minimal in the desired testing range of m and up to a target altitude of 15 m.
- Bird Response to Tethered UAV Test: after the multi-UAV coordination strategy and tethered dynamics have been independently tested and analysed (with consequent changes made wherever needed), the system can be tested as a full prototype in situ on a vineyard.
5.2. Future Research
Target Flock Modelling
- Multi-UAV coordination optimisation: research and development into a decentralised or distributed control architecture where each agent has the capacity to make more ‘informed’ decisions in chasing.
- Multi-UAV arrangement optimisation: the current simulation model assumes that every spot along the property boundary is an equally likely entry point; however, further research should explore different optimised arrangements and grid-generating algorithms which do account for local geography and areas with historically greater recorded bird damage.
- Property size and shape: importantly, further work should analyse the impact of different property sizes and shapes and determine whether there is a relationship that determines the number of drones required per square metre and the scalability of different configurations. Similarly, it should be determined whether there is a relationship between tether length and property size (for a given number of agents or property ‘coverage’ ratio).
- Other applications: the strategy could be analysed in other specialised or smaller contexts, such as hangars or airports where birds can similarly cause disruption, but deterrence regions may only need to be in very specific zones.
5.3. Conclusions
- Development of a simulation model that can operate on a wider testing range, including number of UAVs, number of target flocks and maximum speeds.
- Introduction of tethered UAVs as a potential solution to the bird deterrence problem—implemented both as a spatial constraint and in the cost function strategy within the simulation model.
- Addition of a grid-generation algorithm to arrange any number of UAVs evenly within a given rectangular area.
- Expansion of the UAV bird deterrence problem to a pseudo-3D model involving a 2D probability map representing target flock occupancy but 3D dynamics for the UAVs and target flocks.
- Introduction of a centralised multi-UAV control strategy that can cope and coordinate the chasing of multiple incoming target flocks.
- Introduction of a novel target flock energy expenditure model based on the Common Starling used to relativise effort required by a bird in a given foraging mission due to a particular agent configuration and which can be scaled up to include a catalogue of other target species.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A







References
- Tracey, J.; Saunders, G. Bird Damage to the Wine Grape Industry; Australian Government Bureau of Rural Sciences: Canberra, ACT, Australia, 2003. [Google Scholar]
- Tracey, J.; Bomford, M.; Hart, Q.; Saunders, G.; Sinclair, R. Managing Bird Damage to Fruit and Other Horticultural Crops; Bureau of Rural Science: Canberra, ACT, Australia, 2007. [Google Scholar]
- Anderson, A.; Lindell, C.; Moxcey, K.; Siemer, W.; Linz, G.; Curtis, P.; Carroll, J.; Burrows, C.; Boulanger, J.; Steensma, K.; et al. Bird damage to select fruit crops: The cost of damage and the benefits of control in five states. Crop Prot. 2013, 52, 103–109. [Google Scholar] [CrossRef]
- Elser, J.L.; Lindell, C.A.; Steensma, K.M.M.; Curtis, P.D.; Leigh, D.K.; Siemer, W.F.; Boulanger, J.R.; Shwiff, S.A.; Lindell, J.L.; Steensma, C.A.; et al. Measuring bird damage to three fruit crops: A comparison of grower and field estimates. Crop Prot. 2019, 123, 1–4. [Google Scholar] [CrossRef]
- Pimentel, D.; Zuniga, R.; Morrison, D. Update on the environmental and economic costs associated with alien-invasive species in the United States. Ecol. Econ. 2005, 52, 273–288. [Google Scholar] [CrossRef]
- Storms, R.F.; Carere, C.; Musters, R.; van Gasteren, H.; Verhulst, S.; Hemelrijk, C.K. Deterrence of birds with an artificial predator, the RobotFalcon. J. R. Soc. Interface 2022, 19. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Griffin, A.S.; Lucas, A.; Wong, K.C. Psychological warfare in vineyard: Using drones and bird psychology to control bird damage to wine grapes. Crop Prot. 2019, 120, 163–170. [Google Scholar] [CrossRef]
- Wang, Z.; Fahey, D.; Lucas, A.; Griffin, A.S.; Chamitoff, G.; Wong, K.C. Bird damage management in vineyards: Comparing efficacy of a bird psychology-incorporated unmanned aerial vehicle system with netting and visual scaring. Crop Prot. 2020, 137, 105260. [Google Scholar] [CrossRef]
- Wandrie, L.J.; Klug, P.E.; Clark, M.E. Evaluation of two unmanned aircraft systems as tools for protecting crops from blackbird damage. Crop Prot. 2019, 117, 15–19. [Google Scholar] [CrossRef]
- Bhusal, S.; Khanal, K.; Karkee, M.; Steensam, K.; Taylor, M.E. Unmanned aerial systems (uas) for mitigating bird damage in wine grapes. In Proceedings of the 14th International Conference on Precision Agriculture, Montreal, QC, Canada, 24–27 June 2018. [Google Scholar]
- Schacht-Rodríguez, R.; Ponsart, J.-C.; García-Beltrán, C.D.; Astorga-Zaragoza, C.M. Prognosis & Health Management for the prediction of UAV flight endurance. IFAC-PapersOnLine 2018, 51, 983–990. [Google Scholar] [CrossRef]
- Zikou, L.; Papachristos, C.; Tzes, A. The Power-over-Tether system for powering small UAVs: Tethering-line tension control synthesis. In Proceedings of the 2015 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16-19 June 2015; pp. 681–687. [Google Scholar] [CrossRef]
- Kiribayashi, S.; Yakushigawa, K.; Nagatani, K. Design and Development of Tether-Powered Multirotor Micro Unmanned Aerial Vehicle System for Remote-Controlled Construction Machine. In Proceedings of the 11th Conference on Field and Service Robotics (FSR), Zurich, Switzerland, 12–15 September 2017; pp. 637–648. [Google Scholar]
- Nicotra, M.M.; Naldi, R.; Garone, E. Taut Cable Control of a Tethered UAV. IFAC Proc. 2014, 47, 3190–3195. [Google Scholar] [CrossRef]
- Lupashin, S.; D’Andrea, R. Stabilization of a flying vehicle on a taut tether using inertial sensing. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2432–2438. [Google Scholar] [CrossRef]
- Furukawa, T.; Bourgault, F.; Lavis, B.; Durrant-Whyte, H.F. Recursive Bayesian search-and-tracking using coordinated UAVs for lost targets. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; Volume 2006, pp. 2521–2526. [Google Scholar] [CrossRef]
- Wang, Z.; Wong, K.C. Autonomous Pest Bird Deterring for Agricultural Crops Using Teams of Unmanned Aerial Vehicles. In Proceedings of the 2019 12th Asian Control Conference (ASCC), Kitakyushu, Japan, 9–12 June 2019; pp. 108–113. [Google Scholar]
- Lum, C.W.; Rysdyk, R.T.; Pongpunwattana, A. Occupancy based map searching using heterogeneous teams of autonomous vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; Available online: http://arc.aiaa.org/doi/pdf/10.2514/6.2006-6196 (accessed on 9 March 2023).
- Wang, Z. Intelligent UAVs for Pest Bird Control in Vineyards; The University of Sydney: Sydney, NSW, Australia, 2021. [Google Scholar]
- mRobotics. mRo Pixhawk 2.4.6 Cool Kit (Limited Edition). 2016. Available online: https://store.mrobotics.io/product-p/mro-pixhawk1-fullkit-mr.htm (accessed on 12 August 2018).
- Du, Q.; Faber, V.; Gunzburger, M. Centroidal Voronoi tessellations: Applications and algorithms. SIAM Rev. 1999, 41, 637–676. [Google Scholar] [CrossRef]
- Ju, L.; Ringler, T.; Gunzburger, M. Voronoi Tessellations and Their Application to Climate and Global Modeling; Springer: Berlin/Heidelberg, Germany,, 2011; pp. 313–342. [Google Scholar]
- Pyke, G.H. Optimal Foraging Theory: A Critical Review. Annu. Rev. Ecol. Syst. 1984, 15, 523–575. [Google Scholar] [CrossRef]
- Kie, J.G. Optimal Foraging and Risk of Predation: Effects on Behavior and Social Structure in Ungulates. J. Mammal. 1999, 80, 1114–1129. [Google Scholar] [CrossRef]
- Coleman, J.D. The foods and feeding of starlings in Canterbury. Proc. N. Z. Ecol. Soc. 1977, 24, 94–109. [Google Scholar]
- Heldbjerg, H.; Fox, A.D.; Thellesen, P.V.; Dalby, L.; Sunde, P. Common Starlings (Sturnus vulgaris) increasingly select for grazed areas with increasing distance-to-nest. PLoS ONE 2017, 12, e0182504. [Google Scholar] [CrossRef]
- Wiersma, P. Working for a Living: Physiological and Behavioural Trade-Offs in Birds Facing Hard Work; University of Groningen: Groningen, The Netherlands, 2003. [Google Scholar]
- Dinov, I.D.; Christou, N.; Gould, R. Law of Large Numbers: The Theory, Applications and Technology-Based Education. J. Stat. Educ. 2009, 17, 1–9. [Google Scholar] [CrossRef]
- Whitehead, S.C.; Wright, J.; Cotton, P.A. Winter Field Use by the European Starling Sturnus vulgaris: Habitat Preferences and the Availability of Prey. J. Avian Biol. 1995, 26, 193. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Mass (kg) | BMR (W) | (W) | (W) | (W) |
|---|---|---|---|---|---|
| Value | 0.079 | 0.877 | 20.4 | 27.2 | 10.0 |
| Variable Type | Simulation Parameters |
|---|---|
| Independent | = 1–3) |
| Dependent | ) |
| Nuisance variables and sources of randomness | Target flock entry positions, generated agent grid positions |
| Held-fixed | Property size, target flock type (Common Starling), agent controller policy, agent distribution function, agent sensor range, distribution of ‘interests’ (corresponding to crop type and positioning), climatic conditions, individual target experience and variation |
| (m) | Success Rate (%) | |
|---|---|---|
| 1 | 13 | 97 |
| 14 | 98 | |
| 2 | 13 | 81 |
| 14 | 91 | |
| 3 | 13 | 91 |
| 14 | 96 |
| No. ) | Tether Radius (m) | Deterrence Time t (s) | Energy Expenditure . (J) | Success Rate (%) |
|---|---|---|---|---|
| 1 | - | 65 | 677 | 100 |
| 14 | 65 | 611 | 98 | |
| 2 | - | 103 | 662 | 94 |
| 14 | 71 | 512 | 91 | |
| 3 | - | 113 | 599 | 89 |
| 14 | 78 | 491 | 96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trethowan, J.; Wang, Z.; Wong, K.C. The Viability of a Grid of Autonomous Ground-Tethered UAV Platforms in Agricultural Pest Bird Control. Machines 2023, 11, 377. https://doi.org/10.3390/machines11030377
Trethowan J, Wang Z, Wong KC. The Viability of a Grid of Autonomous Ground-Tethered UAV Platforms in Agricultural Pest Bird Control. Machines. 2023; 11(3):377. https://doi.org/10.3390/machines11030377
Chicago/Turabian StyleTrethowan, Joshua, Zihao Wang, and K. C. Wong. 2023. "The Viability of a Grid of Autonomous Ground-Tethered UAV Platforms in Agricultural Pest Bird Control" Machines 11, no. 3: 377. https://doi.org/10.3390/machines11030377
APA StyleTrethowan, J., Wang, Z., & Wong, K. C. (2023). The Viability of a Grid of Autonomous Ground-Tethered UAV Platforms in Agricultural Pest Bird Control. Machines, 11(3), 377. https://doi.org/10.3390/machines11030377