
Designing a Multi-Agent PLM System for Threaded Connections Using the Principle of Isomorphism of Regularities of Complex Systems





Abstract
:1. Introduction
2. Methods and Software Tools
@ray.remote
def f():
return 1
obj_ref1 = f.remote() # asynchronous call
obj_ref2 = f.remote() # one more
ray.get(obj_ref1) # result
ray.get(obj_ref2)
@ray.remote class FEA(object): # actor class def rule(self, x=0.1): # function describes the agent’s behavior import mypycalculix # import of module implementing FEA mypycalculix.hh=x # changing the model parameter value return mypycalculix.run() # run simulation and return results fea1=FEA.remote() # actor instance ro=fea1.rule.remote(0.1) # asynchronous call ... # other asynchronous calls y=ray.get(ro) # get result
3. Results
part.goto(r0, 0) # go to the point l0=part.draw_line_ax(l) # create a longitudinal line l1=part.draw_line_rad(t1) # create a transverse line
X=[8, 10, 12, 14, 16, 18, 20, 22, 24, 26, 28] Y=[] # result list for x in X: # for each value l_=x # change the value of the parameter (l_ is a global variable) Y.append(run()) # add result to list
F=[FEA.remote() for x in X] # create actors Y=ray.get([f.rule.remote(x) for x, f in zip(X, F) ]) # execute asynchronously
import numpy as np
from sympy import *
P=helixPoints2(f1=“2*pi*t/5”, f2=“t**2+100”, f3=“t**1.3”, h=30,
num=100, plot=True)
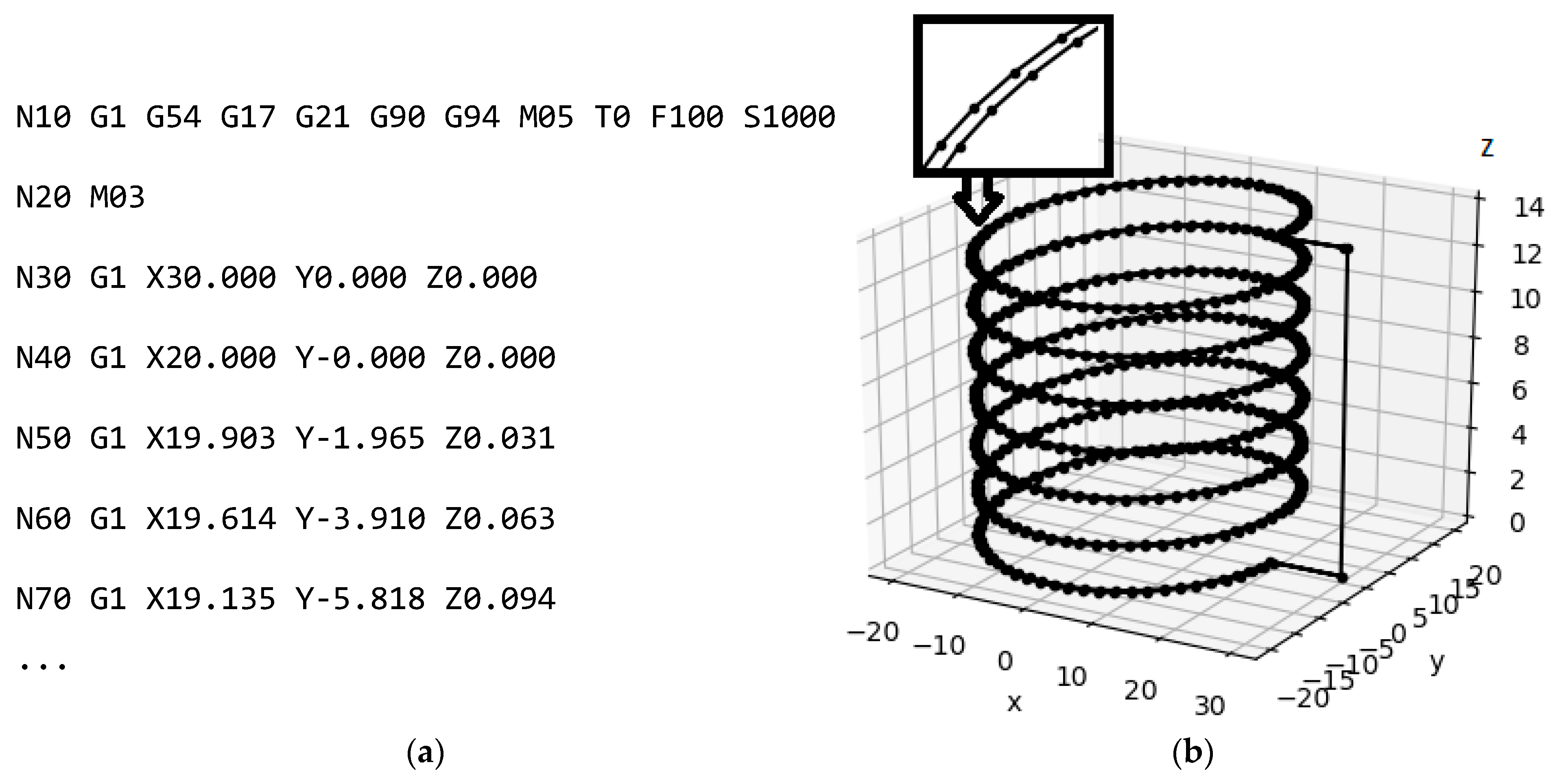
rf=10 # radius of milling cutter # list of points: P=TreadMulti(R=[9.5+rf, 9.6+rf], Z=[0, 0.3], h=14, p=2, fi=0, n=64) code=Gcode(P, “cnc.txt”) # generate G-code and save to file
f1=Fact.remote(“Seqv=14”, “match”, “h=0.1”) f2=Fact.remote(“h=0.1”, “match “, “utot=869e-6”) f3=Fact.remote(“h=0.2”, “match”, “Seqv=16”) r1=Rule1.remote(“match”) r2=Rule2.remote(“match”) r=Reasoner.remote() fea1=FEA.remote() cam1=CAM.remote() scada1=SCADA.remote()
fs=[f1, f2, f3]
rs=[r1, r2]
T=set()
re=1
while re:
re=0
ts=ray.get(r.triplets.remote(fs))
tn=ray.get(r.rule.remote(rs, ts))
if tn:
T.update(tn)
re+=1
print(T)
{('Seqv=16', 'match', 'h=0.2'), ('Seqv=14', 'match', 'utot=869e-6'),
('h=0.1', 'match', 'Seqv=14'), ('utot=869e-6', 'match', 'h=0.1')}
y1=ray.get(fea1.rule.remote(0.1))
y2=ray.get(cam1.rule.remote(0.1)) # trajectory points import CNC_thread_mill CNC_thread_mill.plotCNC(y2) # point visualization
scada1ref=scada1.rule.remote(0.1)
X,Y=ray.get(scada1ref) import matplotlib.pyplot as plt plt.plot(X,Y) plt.show()
While XY length is less than 20:
Get XY from environment
Find x with find()
Reserve space in XY environment by key x
If it's already reserved, go to the next iteration
Calculate the value of f(x) and write it to the environment by key x
Get indices I for sort Y Choose a random index i from I (the probability of choosing increases towards the beginning of the list I) Given index i find index j of element in Y Find index k of neighboring element on the left (k=j-1) or right (k=j+1) Find x=(X[i]+X[k])/2
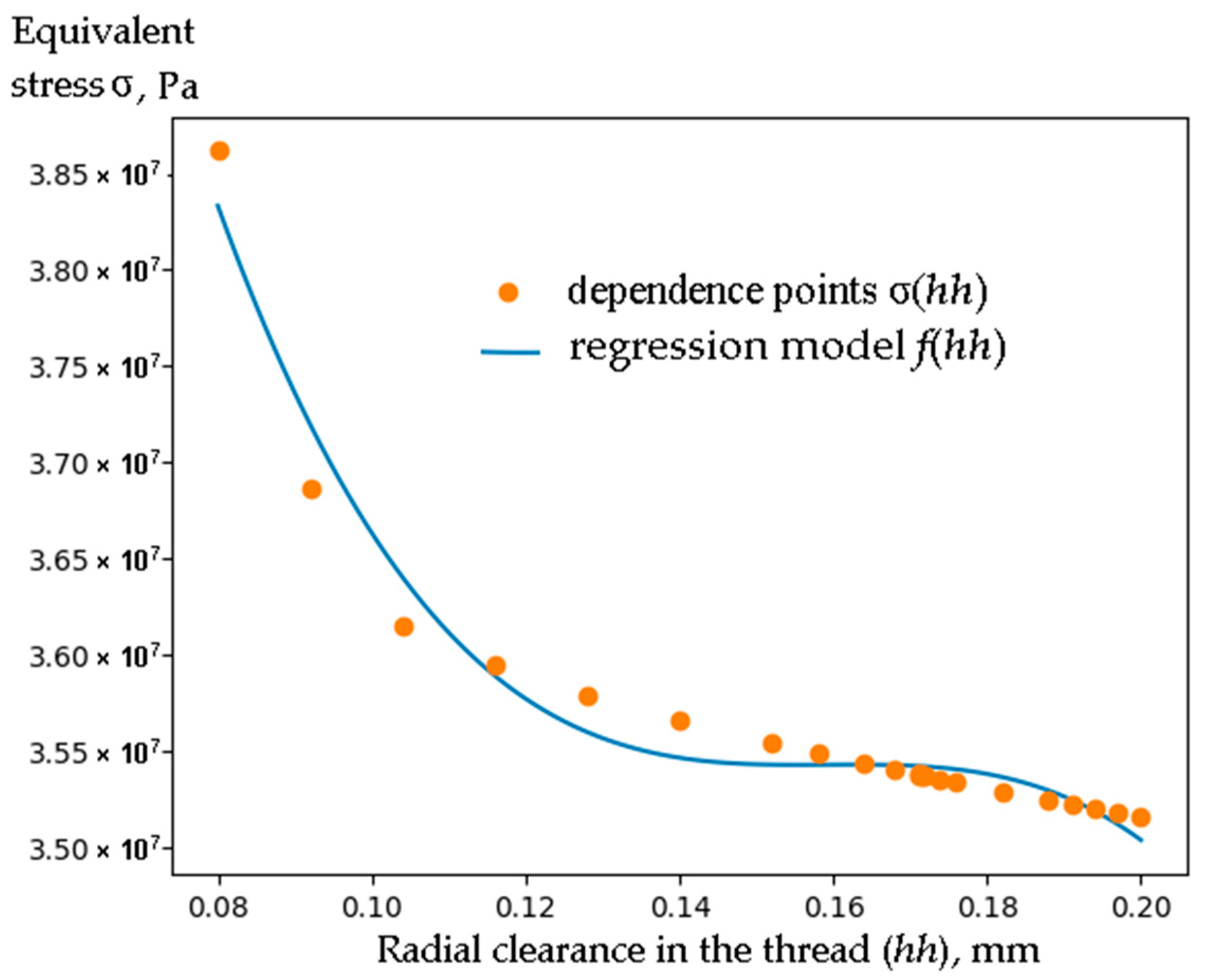
ray.init() e=Environment.remote() # actor-environment X=np.linspace(0.08, 0.2, 6) # initial X grid O=[OptiX.remote(FEA.remote()) for x in X] # actors-agents for optimization Y=ray.get([o.calc.remote(x) for o,x in zip(O,X)]) # initial values ray.get(e.setXY.remote(dict(zip(X, Y)))) # set initial environment # additional actors-agents for optimization by another method O.append(OptiR.remote(FEA.remote(), lambda x,a,b,c: a*x**2+b*x+c)) O.append(OptiR.remote(FEA.remote(), lambda x,a,b,c,d: a*x**3+b*x**2+c*x+d)) ray.get([o.rule.remote() for o in O]) # agents run until all return None XY=ray.get(e.getXY.remote()) X,Y=dict2arr(XY) print(“argmin:”, X[Y.argmin()]) # minimum # visualization: x=np.linspace(X.min(), X.max(), 100) import matplotlib.pyplot as plt popt, R2=ray.get(O[-1].fit.remote(X, Y)) # regression parameters f=lambda x,a,b,c,d: a*x**3+b*x**2+c*x+d # regression dependence plt.plot(x, f(x, *popt)) # curve plt.plot(X, Y, “o”) # points plt.show() ray.shutdown()
4. Discussion
5. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Saaksvuori, A.; Immonen, A. Product Lifecycle Management, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Grieves, M. Product Lifecycle Management—Driving the Next Generation of Lean Thinking; McGraw-Hill: New York, NY, USA, 2006. [Google Scholar]
- Liu, W.; Zeng, Y.; Maletz, M.; Brisson, D. Product Lifecycle Management: A Survey. In Proceedings of the 29th ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Parts A and B, San Diego, CA, USA, 30 August–2 September 2009; Volume 2, pp. 1213–1225. [Google Scholar]
- Kopey, V.B. Abstract model of product lifecycle management system. Precarpathian Bull. Shevchenko Sci. Soc. 2017, 2, 71–96. (In Ukrainian) [Google Scholar]
- Bertalanffy, L.V. General System Theory: Foundations, Development, Applications; George Braziller, Inc.: New York, NY, USA, 1968. [Google Scholar]
- Kossiakoff, A.; Sweet, W.N.; Seymour, S.J.; Biemer, S.M. Systems Engineering Principles and Practice, 2nd ed.; A John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Volkova, V.N. Gradual Formalization of Decision-Making Models; Saint Petersburg State Technical University: Saint Petersburg, Russia, 2006. (In Russian) [Google Scholar]
- Shchedrovitsky, G.P. Selected Writings; Shkola Kul’turnoj Politiki: Moscow, Russia, 1995. (In Russian) [Google Scholar]
- Kopei, V.B. Scientific and Methodological Bases of Computer-Aided Design of Equipment for a Sucker Rod Pumping Unit. Ph.D. Thesis, Technical Sciences Degree in Speciality 05.05.12—Machines of Oil and Gas Industry. Ivano-Frankivsk National Technical University of Oil and Gas, Ivano-Frankivsk, Ukraine, 2020. (In Ukrainian). [Google Scholar]
- Wooldridge, M.; Jennings, N.R. Intelligent agents: Theory and practice. Knowl. Eng. Rev. 1995, 10, 115–152. [Google Scholar] [CrossRef]
- Wooldridge, M. An Introduction to Multi-Agent Systems; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Shoham, Y.; Leyton-Brown, K. Multiagent Systems: Algorithmic, Game-Theoretic, and Logical Foundations; Cambridge University Press: Cambridge, MA, USA, 2008. [Google Scholar]
- Kravari, K.; Bassiliades, N. A survey of agent platforms. J. Artif. Soc. Soc. Simul. 2015, 18, 11. [Google Scholar] [CrossRef]
- Shoham, Y. Agent-oriented programming. Artif. Intell. 1993, 60, 51–92. [Google Scholar] [CrossRef]
- Abadi, A.; Sekkat, S.; Zemmouri, E.M.; Benazza, H. Using Ontologies for the Integration of Information Systems Dedicated to Product (CFAO, PLM…) and Those of Systems Monitoring (ERP, MES..). In Proceedings of the 2017 International Colloquium on Logistics and Supply Chain Management, LOGISTIQUA 2017, Rabat, Morocco, 27–28 April 2017; pp. 59–64. [Google Scholar]
- Camarillo, A.; Ríos, J.; Althoff, K. Knowledge-based multi-agent system for manufacturing problem solving process in production plants. J. Manuf. Syst. 2018, 47, 115–127. [Google Scholar] [CrossRef]
- Reichle, M.; Bach, K.; Althoff, K.D. The Seasalt Architecture and Its Realization within the Docquery Project. In KI 2009, Advances in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; pp. 556–563. [Google Scholar]
- Diakun, J.; Dostatni, E. End-of-life design aid in PLM environment using agent technology. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 207–214. [Google Scholar]
- Dostatni, E.; Diakun, J.; Hamrol, A.; Mazur, W. Application of agent technology for recycling-oriented product assessment. Ind. Manag. Data Syst. 2013, 113, 817–839. [Google Scholar] [CrossRef]
- Gomes, S.; Monticolo, D.; Hilaire, V.; Mahdjoub, M. A multi-agent system embedded to a product lifecycle management to synthesise and reuse industrial knowledge. Int. J. Prod. Lifecycle Manag. 2007, 2, 317–336. [Google Scholar] [CrossRef]
- Kumar, V.V.; Sahoo, A.; Liou, F.W. Cyber-enabled product lifecycle management: A multi-agent framework. Procedia Manuf. 2019, 39, 123–131. [Google Scholar] [CrossRef]
- Lahoud, I.; Gomes, S.; Hilaire, V.; Monticolo, D. A Multi-Agent Platform to Manage Distributed and Heterogeneous Knowledge by Using Semantic Web. In Proceedings of the IAENG Transactions on Electrical Engineering Volume 1: Special Issue of the International Multiconference of Engineers and Computer Scientists 2012, Hong Kong, China, 14–16 March 2012; pp. 215–228. [Google Scholar]
- Mahdjoub, M.; Monticolo, D.; Gomes, S.; Sagot, J. A collaborative design for usability approach supported by virtual reality and a multi-agent system embedded in a PLM environment. CAD Comput. Aided Des. 2010, 42, 402–413. [Google Scholar] [CrossRef]
- Marchetta, M.G.; Mayer, F.; Forradellas, R.Q. A reference framework following a proactive approach for product lifecycle management. Comput. Ind. 2011, 62, 672–683. [Google Scholar] [CrossRef]
- Matsokis, A.; Kiritsis, D. An ontology-based approach for product lifecycle management. Comput. Ind. 2010, 61, 787–797. [Google Scholar] [CrossRef]
- Choiński, D.; Senik, M. Distributed control systems integration and management with an ontology-based multi-agent system. Bull. Pol. Acad. Tech. 2018, 5, 613–620. [Google Scholar]
- Karasev, V.O.; Sukhanov, V.A. Product lifecycle management using multi-agent systems models. Procedia Comput. Sci. 2017, 103, 142–147. [Google Scholar] [CrossRef]
- Giret, A.; Botti, V. From System Requirements to Holonic Manufacturing System Analysis. Int. J. Prod. Res. 2006, 44, 3917–3928. [Google Scholar] [CrossRef]
- Derigent, W.; Cardin, O.; Trentesaux, D. Industry 4.0: Contributions of holonic manufacturing control architectures and future challenges. J. Intell. Manuf. 2020, 32, 1797–1818. [Google Scholar] [CrossRef]
- Bussmann, S.; Jennings, N.R.; Wooldridge, M. Multiagent Systems for Manufacturing Control: A Design Methodology; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Kopei, V.B.; Onysko, O.R.; Panchuk, V.G. Principles of development of product lifecycle management system for threaded connections based on the Python programming language. J. Phys. Conf. Ser. 2020, 1426, 012033. [Google Scholar] [CrossRef]
- Birger, I.A.; Iosilevich, G.B. Threaded and Flange Connections; Mashinostroenie: Moscow, Russia, 1990. (In Russian) [Google Scholar]
- Bickford, J.H. An Introduction to the Design and Behavior of Bolted Joints, 3rd ed.; Revised and Expanded; CRC Press: Taylor and Francis: Boca Raton, FL, USA, 2017. [Google Scholar]
- Fukuoka, T. The Mechanics of Threaded Fasteners and Bolted Joints for Engineering and Design; Elsevier: Amsterdam, The Netherlands, 2022. [Google Scholar]
- Shatskyi, I.; Ropyak, L.; Velychkovych, A. Model of contact interaction in threaded joint equipped with spring-loaded collet. Eng. Solid Mech. 2020, 8, 301–312. [Google Scholar] [CrossRef]
- Tutko, T.; Dubei, O.; Ropyak, L.; Vytvytskyi, V. Determination of Radial Displacement Coefficient for Designing of Thread Joint of Thin-Walled Shells. In Lecture Notes in Mechanical Engineering; Advances in Design, Simulation and Manufacturing IV. DSMIE 2021; Ivanov, V., Trojanowska, J., Pavlenko, I., Zajac, J., Peraković, D., Eds.; Springer: Cham, Switzerland, 2021; pp. 153–162. [Google Scholar]
- Dubei, O.Y.; Tutko, T.F.; Ropyak, L.Y.; Shovkoplias, M.V. Development of Analytical Model of Threaded Connection of Tubular Parts of Chrome-Plated Metal Structures. Metallofiz. Noveishie Tekhnologii 2022, 44, 251–272. [Google Scholar] [CrossRef]
- Pryhorovska, T.; Ropyak, L. Machining Error Influence on Stress State of Conical Thread Joint Details. In Proceedings of the International Conference on Advanced Optoelectronics and Lasers, CAOL, Sozopol, Bulgaria, 6–8 September 2019; pp. 493–497. [Google Scholar] [CrossRef]
- Bazaluk, O.; Velychkovych, A.; Ropyak, L.; Pashechko, M.; Pryhorovska, T.; Lozynskyi, V. Influence of heavy weight drill pipe material and drill bit manufacturing errors on stress state of steel blades. Energies 2021, 14, 4198. [Google Scholar] [CrossRef]
- Ropyak, L.Y.; Vytvytskyi, V.S.; Velychkovych, A.S.; Pryhorovska, T.O.; Shovkoplias, M.V. Study on grinding mode effect on external conical thread quality. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1018, 012014. [Google Scholar] [CrossRef]
- Neshta, A.; Kryvoruchko, D.; Hatala, M.; Ivanov, V.; Botko, F.; Radchenko, S.; Mital, D. Technological Assurance of High-Efficiency Machining of Internal Rope Threads on Computer Numerical Control Milling Machines. J. Manuf. Sci. Eng. 2018, 140, 071012. [Google Scholar] [CrossRef]
- Shats’kyi, I.P.; Lyskanych, O.M.; Kornuta, V.A. Combined Deformation Conditions for Fatigue Damage Indicator and Well-Drilling Tool Joint. Strength Mater. 2016, 48, 469–472. [Google Scholar] [CrossRef]
- Severinchik, N.A.; Kopei, B.V. Inhibitive protection of steel drill pipes from corrosion fatigue. Sov. Mater. Sci. 1978, 13, 318–319. [Google Scholar] [CrossRef]
- Kopei, B.V.; Gnyp, I.P. A method for the prediction of the service life of high-strength drill pipes based on the criteria of corrosion fatigue. Mater. Sci. 1997, 33, 99–103. [Google Scholar] [CrossRef]
- Van Rossum, G.; Drake, F.L. Python 3 Reference Manual; CreateSpace: Scotts Valley, CA, USA, 2009. [Google Scholar]
- Artamonov, I.V. Free software: Advantages and disadvantages. Izv. Irkutsk. State Econ. Acad. 2012, 5, 122–125. (In Russian) [Google Scholar]
- Dhondt, G. The Finite Element Method for Three-Dimensional Thermomechanical Applications; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Geuzaine, C.; Remacle, J.F. Gmsh: A Three-Dimensional Finite Element Mesh generator with built-in pre- and post-processing facilities. Int. J. Numer. Methods Eng. 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Fritzson, P.; Aronsson, P.; Lundvall, H.; Nyström, K.; Pop, A.; Saldamli, L.; Broman, D. The OpenModelica Modeling, Simulation, and Software Development Environment. Simul. News Eur. Dec. 2005, 15, 8–16. [Google Scholar]
- Grbl: An Open Source, Embedded, High Performance g-Code-Parser and CNC Milling Controller Written in Optimized C That Will Run on a Straight Arduino. Available online: https://github.com/gnea/grbl (accessed on 29 December 2022).
- Paviot, T. Pythonocc-Core: Python Package for 3D CAD/BIM/PLM/CAM. Available online: https://github.com/tpaviot/pythonocc-core (accessed on 29 December 2022).
- OPEN CASCADE. Available online: http://www.opencascade.com (accessed on 29 December 2022).
- FreeCAD: Your Own 3D Parametric Modeler. Available online: https://www.freecadweb.org (accessed on 29 December 2022).
- Harris, C.R.; Millman, K.J.; van der Walt, S.J.; Gommers, R.; Virtanen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J.; et al. Array programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Meurer, A.; Smith, C.P.; Paprocki, M.; Čertík, O.; Kirpichev, S.B.; Rocklin, M.; Kumar, A.; Ivanov, S.; Moore, J.K.; Singh, S.; et al. SymPy: Symbolic computing in Python. PeerJ Comput. Sci. 2017, 3, e103. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. JMLR 2011, 12, 2825–2830. [Google Scholar]
- Black, J. Pycalculix. Available online: https://github.com/spacether/pycalculix (accessed on 29 December 2022).
- Kluyver, T.; Ragan-Kelley, B.; Pérez, F.; Granger, B.; Bussonnier, M.; Frederic, J.; Bussonnier, M.; Frederic, J.; Kelley, K.; Hamrick, J.; et al. Jupyter Notebooks—A Publishing Format for Reproducible Computational Workflows. In Positioning and Power in Academic Publishing: Players, Agents and Agendas; Loizides, F., Scmidt, B., Eds.; IOS Press: Amsterdam, The Netherlands, 2016; pp. 87–90. [Google Scholar]
- Moritz, P.; Nishihara, R.; Wang, S.; Tumanov, A.; Liaw, R.; Liang, E.; Elibol, M.; Yang, Z.; Paul, W.; Jordan, M.I.; et al. Ray: A Distributed Framework for Emerging AI Applications. In Proceedings of the 13th USENIX Symposium on Operating Systems Design and Implementation (OSDI’18), Carlsbad, CA, USA, 8–10 October 2018. [Google Scholar]
- Rogers, D.F.; Adams, J.A. Mathematical Elements for Computer Graphics, 2nd ed.; McGraw-Hill: New York, NY, USA, 1989. [Google Scholar]
- Kopei, V.; Onysko, O. Educational Multi-Agent PLM System for Threaded Connections. Available online: https://github.com/vkopey/ThreadsPLM-MAS (accessed on 31 December 2022).
- CLIPS: A Tool for Building Expert Systems. Available online: https://clipsrules.net (accessed on 29 December 2022).
- Python Streaming Scripts. Available online: https://github.com/gnea/grbl/wiki/Using-Grbl#python-streaming-scripts-officially-supported-by-grbl-cross-platform (accessed on 29 December 2022).
- GRBL Controller Application with G-Code Visualizer Written in Qt. Available online: https://github.com/Denvi/Candle (accessed on 29 December 2022).
- PCB Design and Circuit Simulator Software—Proteus. Available online: https://www.labcenter.com (accessed on 29 December 2022).
- Wales, D.J.; Doye, J.P.K. Global Optimization by Basin-Hopping and the Lowest Energy Structures of Lennard-Jones Clusters Containing up to 110 Atoms. J. Phys. Chem. A 1997, 101, 5111. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Kopei, V.B. Algorithm of an Intelligent System Based on Interdisciplinary Studies of System-Wide Regularities. In Proceedings of the Materials 4th International Scientific-Technical Conference Computer Modelling and Optimization of Complex System, Ministry of Education and Science of Ukraine, Ukrainian State University of Chemical Technology, Balance-Club, Dnipro, Ukraine, 1–2 November 2018; pp. 246–248. (In Ukrainian). [Google Scholar]
- Forgy, C. Rete: A Fast Algorithm for the Many Pattern/Many Object Pattern Match Problem. Artif. Intell. 1982, 19, 17–37. [Google Scholar] [CrossRef]
- Datalog Logic Programming in Python. Available online: https://sites.google.com/site/pydatalog (accessed on 29 December 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference, Year | Objective | Principles, Approaches, Methods, or Tools | Scope or Case Study |
|---|---|---|---|
| [30], 2004 | Methodology for designing agent-based control systems | Analysis of decision-making, identification of agents, and selection of interaction protocols | Production control systems |
| [28], 2006 | Design of holonic manufacturing system | Holonic concepts, holonic manufacturing system, INGENIAS methodology, PROSA reference architecture for holonic systems, and holon identification and specification | Ceramic tile factory, assembly, and supplier company of automobile parts |
| [20], 2007 | A knowledge engineering module integrated in a PLM | Knowledge engineering module with multi-domain scheme and multiple viewpoints, knowledge-based MAS, knowledge reuse, and collaborative design | Knowledge management in industrial company |
| [25], 2010 | Method for developing ontologies from existing models | Ontology model of a product data and knowledge management semantic object model (SOM), closed-loop PLM, OWL-DL, data integration and interoperability, logic reasoning and semantic web rules, transformation of the UML-based SOM into an ontology, and Protégé | Automotive industry (passenger vehicles) |
| [23], 2010 | A collaborative design for usability approach | Extract and reuse engineering knowledge, design for usability, and virtual prototype testing | Improve ergonomics and collaborative design in industrial areas |
| [24], 2011 | Framework based on a proactive-product approach to PLM | Proactive-product approach, reference framework for PLM, business process model, product information model, and product information exploitation | Supporting change propagation in the automotive industry |
| [22], 2012 | Platform to manage distributed knowledge | Distributed and heterogeneous knowledge management, Semantic Web, OWL-Lite, RDF annotations, semantic wiki, and SQL query | Heterogeneous and distributed information management during engineering projects |
| [19], 2013 | Multi-agent tool for computer-aided and recycling-oriented design | Distributed design environment, method supporting eco-design based on agent technology, recycling process, and recycling-oriented product assessment | Recycling-oriented product design |
| [15], 2017 | Approach to automate the development of a new product | Ontology, Semantic Web, concept of agent, based on the ontology integration of heterogeneous information systems, and manufacturing execution system | The control of a flexible cell machining |
| [27] 2017 | Multi-agent model of automated lifecycle management information system (ALMIS) | Logic analysis, probabilistic approach, logistic support analysis (LSA) method, dynamic system behavior verification, data acquisition, data and knowledge generation, and data and knowledge actualization | PLM- and LSA-related tasks solving and automation for complex engineering products |
| [16], 2018 | Production-oriented software system aimed to assist shop floor actors during a manufacturing problem-solving process | Knowledge management, integration of the problem-solving method 8D, Process Failure Mode and Effect Analysis (PFMEA), Case-Based Reasoning (CBR), and SEASALT | To assist shop floor actors during a manufacturing problem-solving process |
| [26], 2018 | Integration of different elements of a distributed control system | Petri nets, ontology-based interfaces and data structures, modal logic-based ontology analysis, and multi agent cross-platform system (MAXS) | Distributed control systems integration and management |
| [21], 2019 | Framework for monitoring the performance and predicting impending failure | Cyber-enabled PLM, Internet of Things, prognostics and health management, material flow (hard agent), information flow (wave agent), and logic and control flow (soft agent) | Health monitoring of power grid components to prevent unscheduled maintenance and downtime |
| [18], 2020 | End-of-life design aid | End-of-life oriented product design, recycling product model, total recycling indicator, PLM Enovia SmarTeam environment, and 3D CAD | Recycling-oriented assessment of a real household appliance |
| [31], 2020 | Principles of PLM system development based on system-wide regularities | The principle of isomorphism of regularities of systems, CAD, FEA, Python-objects, and Datalog | PLM of threaded connections of oil and gas equipment |
| Arduino-Sketch | Python-Module HX711proteus_client.py |
|---|---|
#include “HX711.h”
#define calibration_factor (18029.57)
#define DOUT 3
#define CLK 2
HX711 scale(DOUT, CLK);
void setup() {
Serial.begin(9600);
scale.set_scale(calibration_factor);
scale.tare();
}
void loop() {
Serial.println(scale.get_units(), 2);
delay(1000);
}
|
# -*- coding: utf-8 -*-
import serial,time
def run():
ser = serial.Serial(port='COM7',
baudrate=9600)
X, Y = [], []
for x in range(10):
y = ser.readline()
y = float(y)
X.append(x)
Y.append(y)
time.sleep(1)
ser.close()
return X, Y
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kopei, V.; Onysko, O.; Barz, C.; Dašić, P.; Panchuk, V. Designing a Multi-Agent PLM System for Threaded Connections Using the Principle of Isomorphism of Regularities of Complex Systems. Machines 2023, 11, 263. https://doi.org/10.3390/machines11020263
Kopei V, Onysko O, Barz C, Dašić P, Panchuk V. Designing a Multi-Agent PLM System for Threaded Connections Using the Principle of Isomorphism of Regularities of Complex Systems. Machines. 2023; 11(2):263. https://doi.org/10.3390/machines11020263
Chicago/Turabian StyleKopei, Volodymyr, Oleh Onysko, Cristian Barz, Predrag Dašić, and Vitalii Panchuk. 2023. "Designing a Multi-Agent PLM System for Threaded Connections Using the Principle of Isomorphism of Regularities of Complex Systems" Machines 11, no. 2: 263. https://doi.org/10.3390/machines11020263
APA StyleKopei, V., Onysko, O., Barz, C., Dašić, P., & Panchuk, V. (2023). Designing a Multi-Agent PLM System for Threaded Connections Using the Principle of Isomorphism of Regularities of Complex Systems. Machines, 11(2), 263. https://doi.org/10.3390/machines11020263