
Tracked Locomotion Systems for Ground Mobile Robots: A Review




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
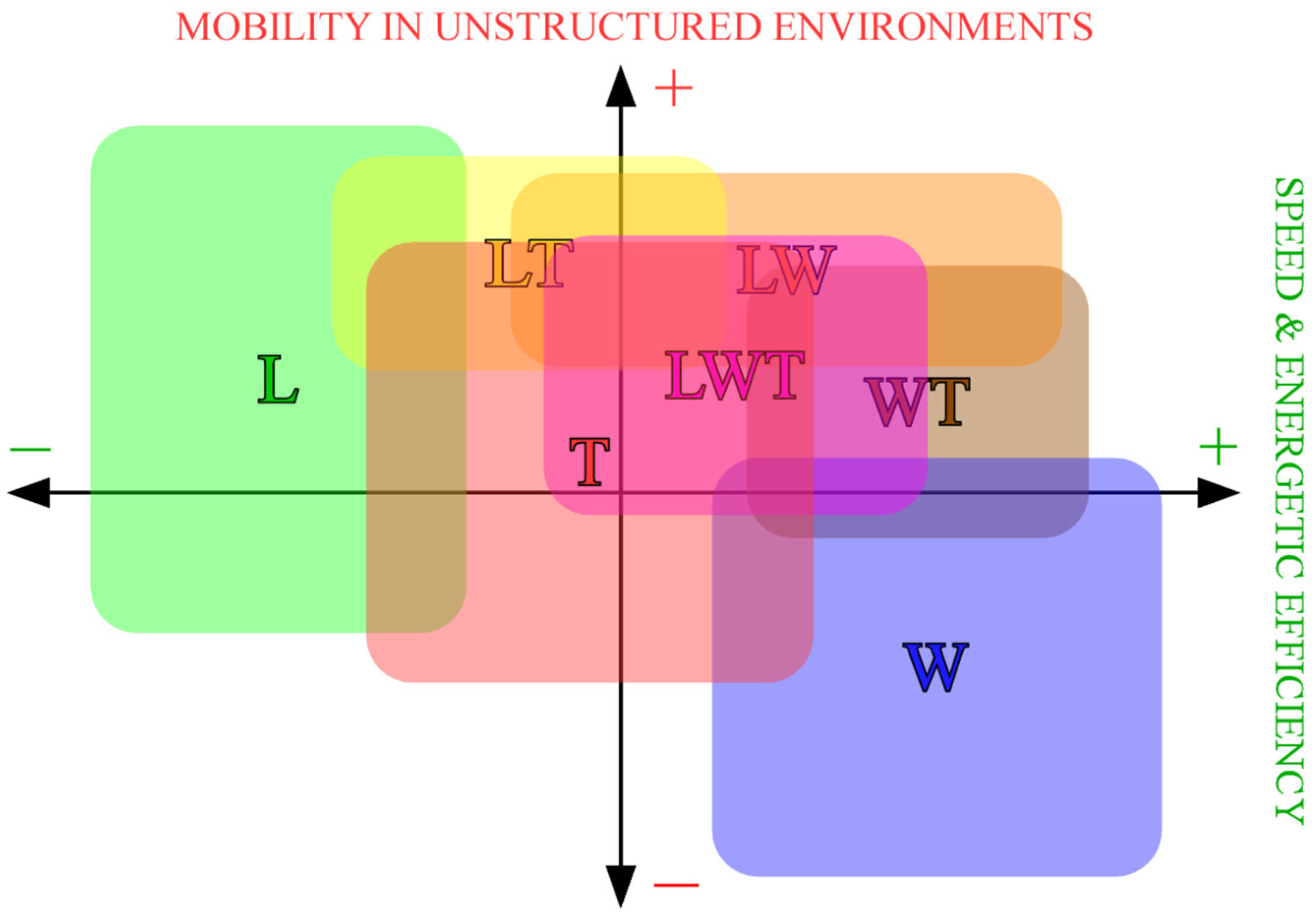
2. Classifications of Tracked Locomotion Systems
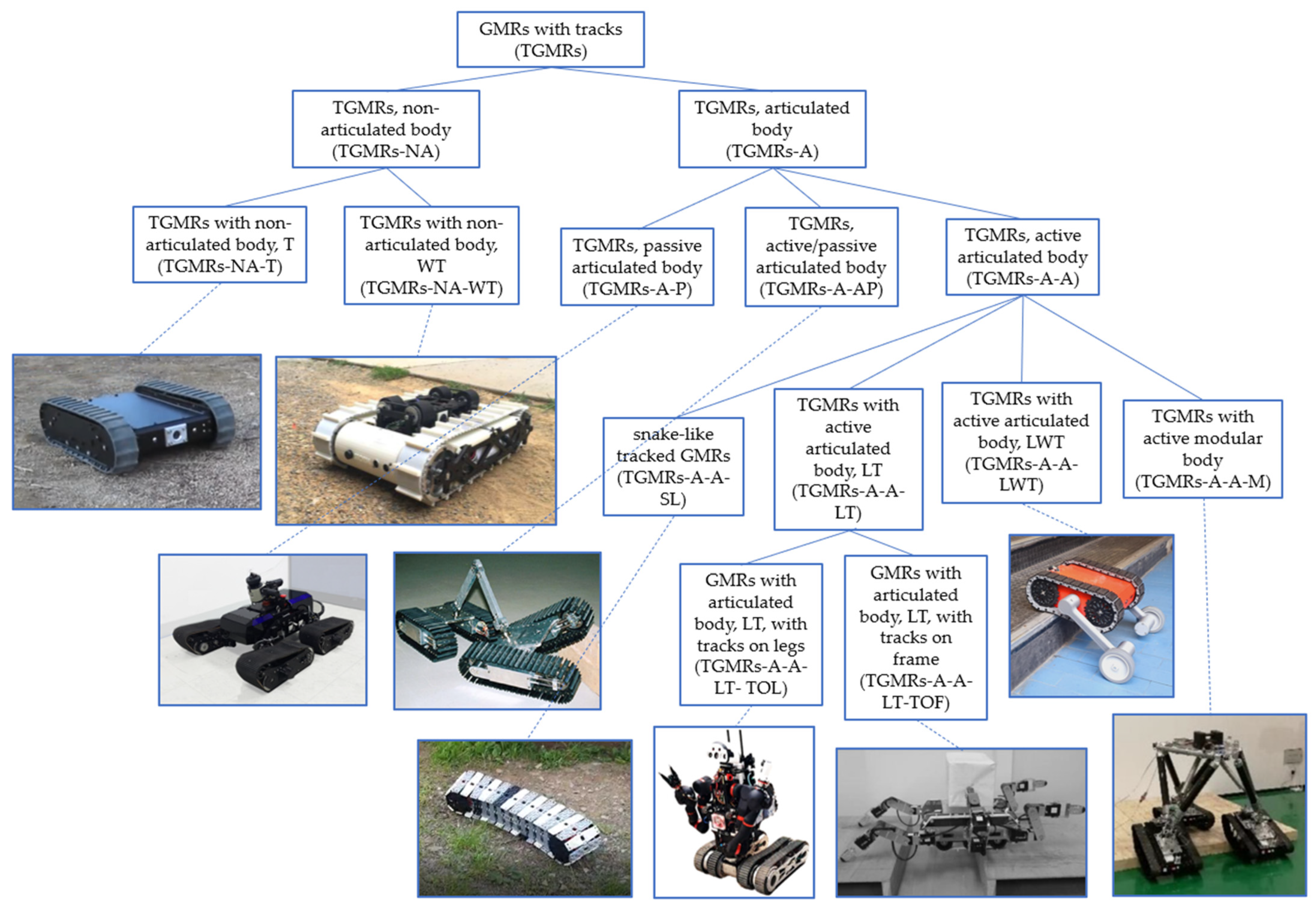
3. Classification of Body Architectures of Tracked Robots
3.1. Body of a Tracked Robot: Definition and Classes
3.2. Ground Mobile Robots with Tracks, Non-Articulated Body
3.3. Ground Mobile Robots with Tracks, Articulated Body
- TGMRs with passive articulated body (TGMRs-A-P), in which all the degrees of freedom of the body are passive;
- TGMRS with active/passive articulated body (TGMRs-A-AP), in which some degrees of freedom of the body are actuated while other are passive;
- TGMRS with active articulated body (TGMRs-A-A), in which all the degrees of freedom of the body are actuated.
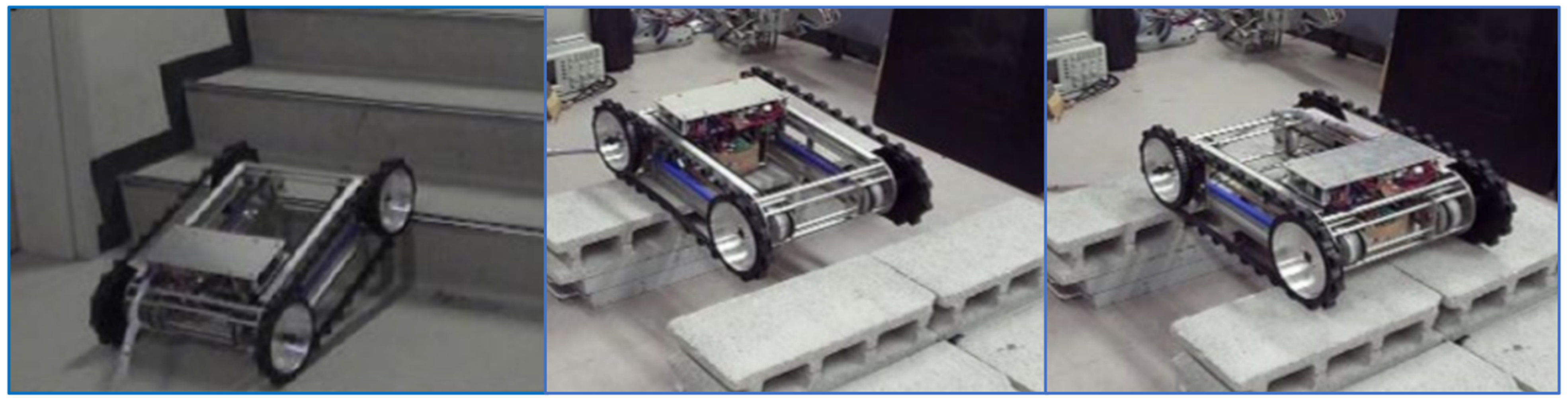
- Hybrid leg-track robots (TGMRs-A-A-LT);
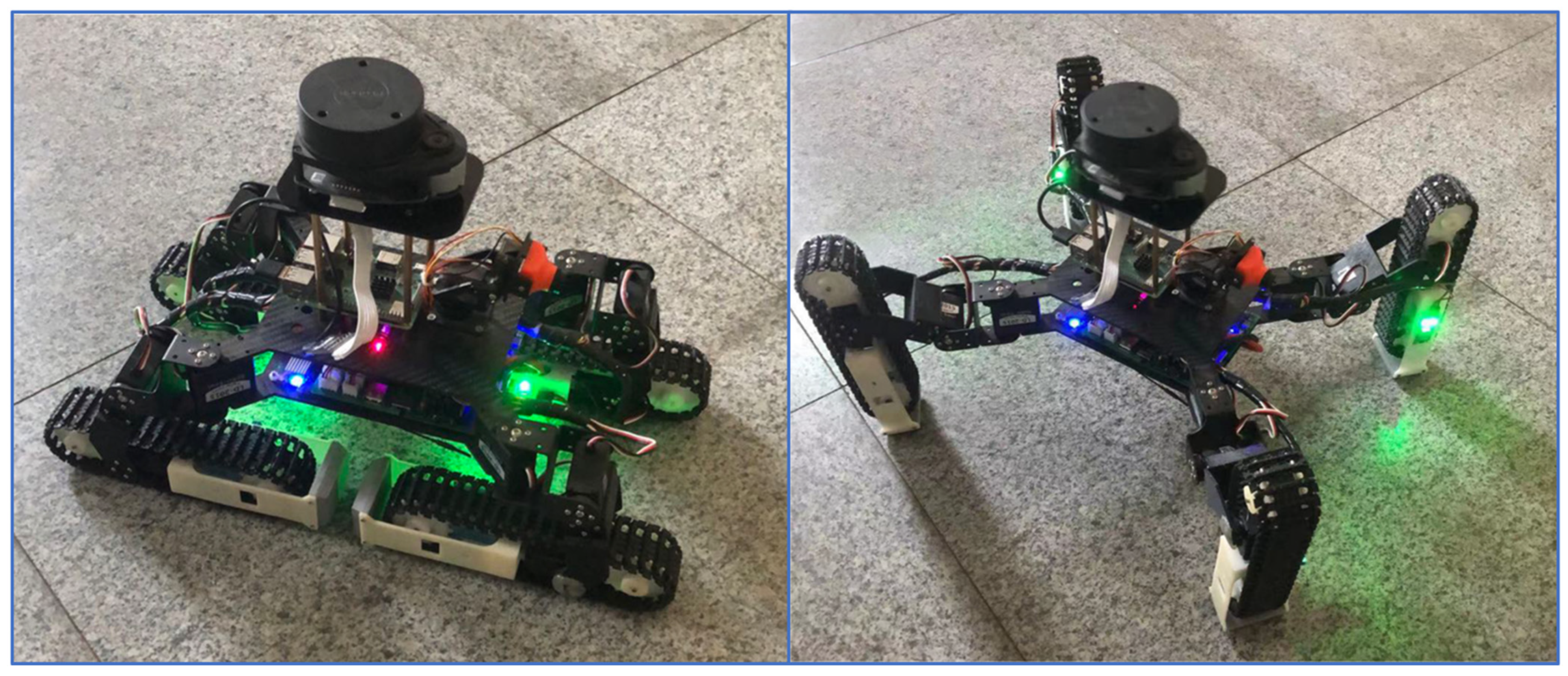
- Hybrid leg-wheel-track robots (TGMRs-A-A-LWT);
- TGMRs with active modular body (TGMRs-A-A-M).
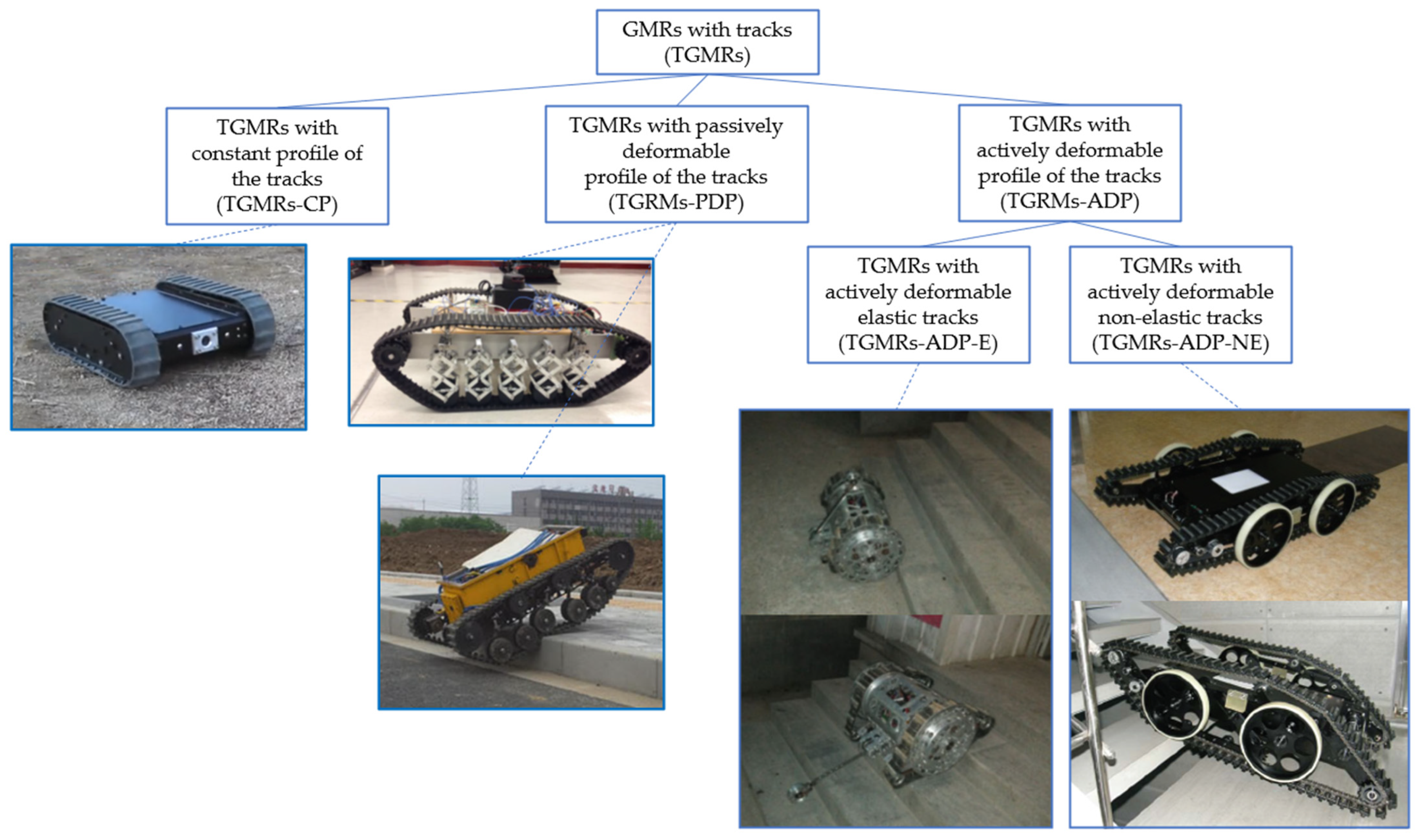
4. Classification of Track Profiles
- TGMRs with constant profile of the tracks (TGMRs-CP);
- TGMRs with passively deformable profile of the tracks (TGMRs-PDP);
- TGMRs with actively deformable profile of the tracks (TGMRs-ADP).
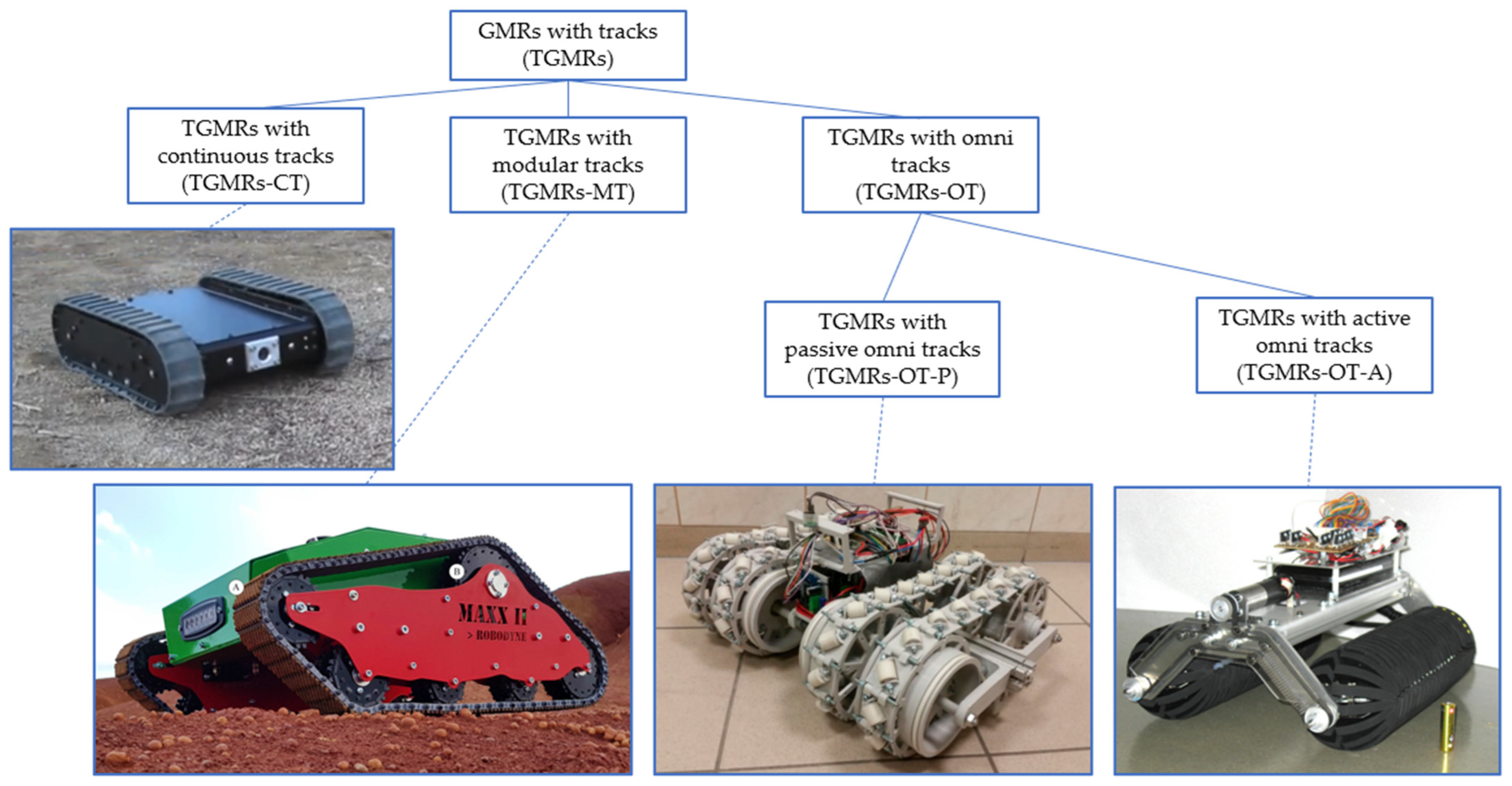
5. Classification of Track Types
- TGMRs with continuous tracks (TGMRs-CT);
- TGMRs with modular tracks (TGMRs-MT);
- TGMRs with omni tracks (TGMRs-OT).
6. Design Methodologies for Tracked Ground Mobile Robots
6.1. Modelling and Simulation of the Dynamic Behavior of TGMRs
6.2. Motion Resistance of Tracks
- The resistance Rt due to the interaction between tracks and terrain;
- The resistance Rin due to the internal friction of the tracks;
- The resistance Re due to the external forces acting on the vehicle.
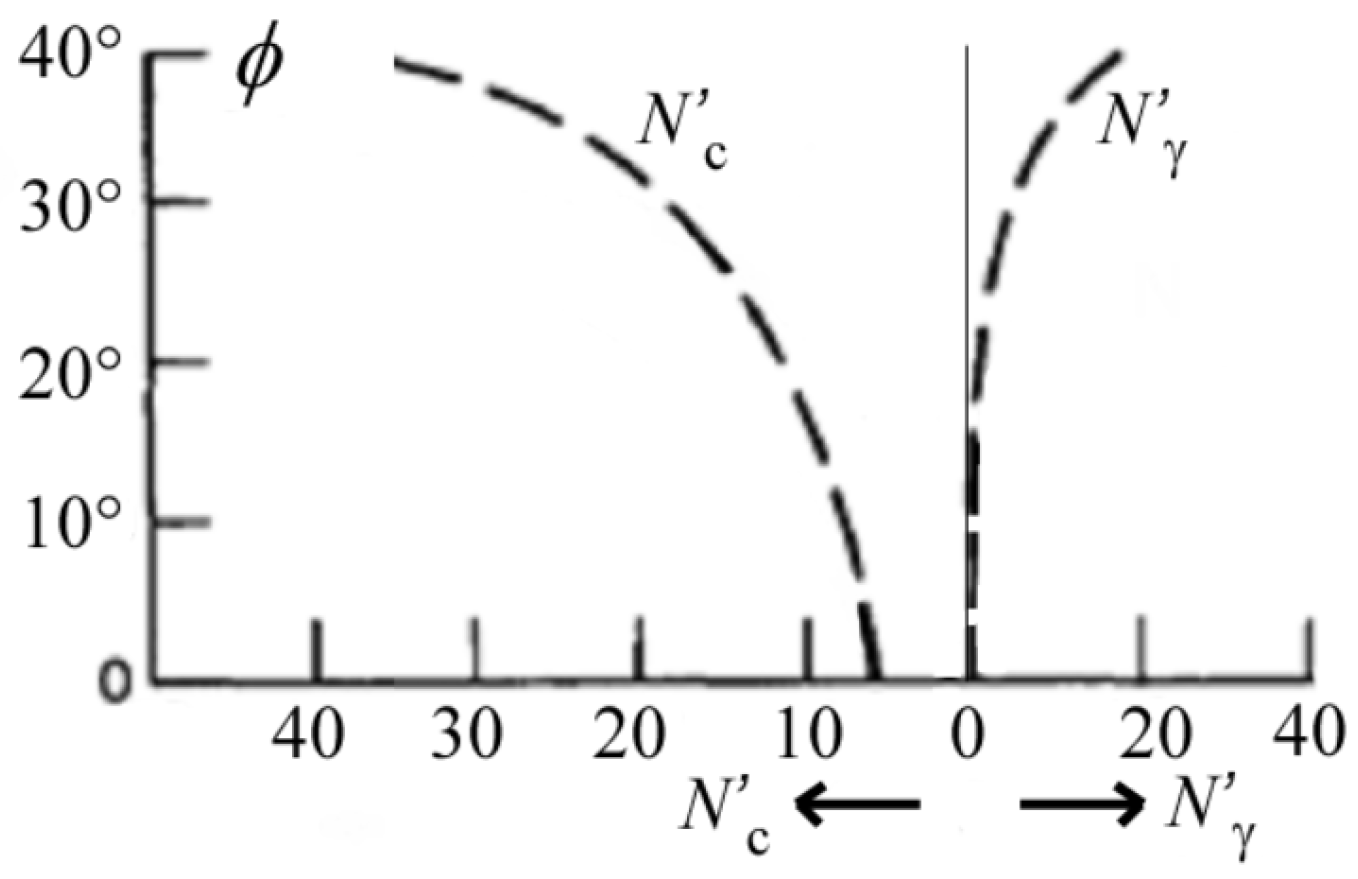
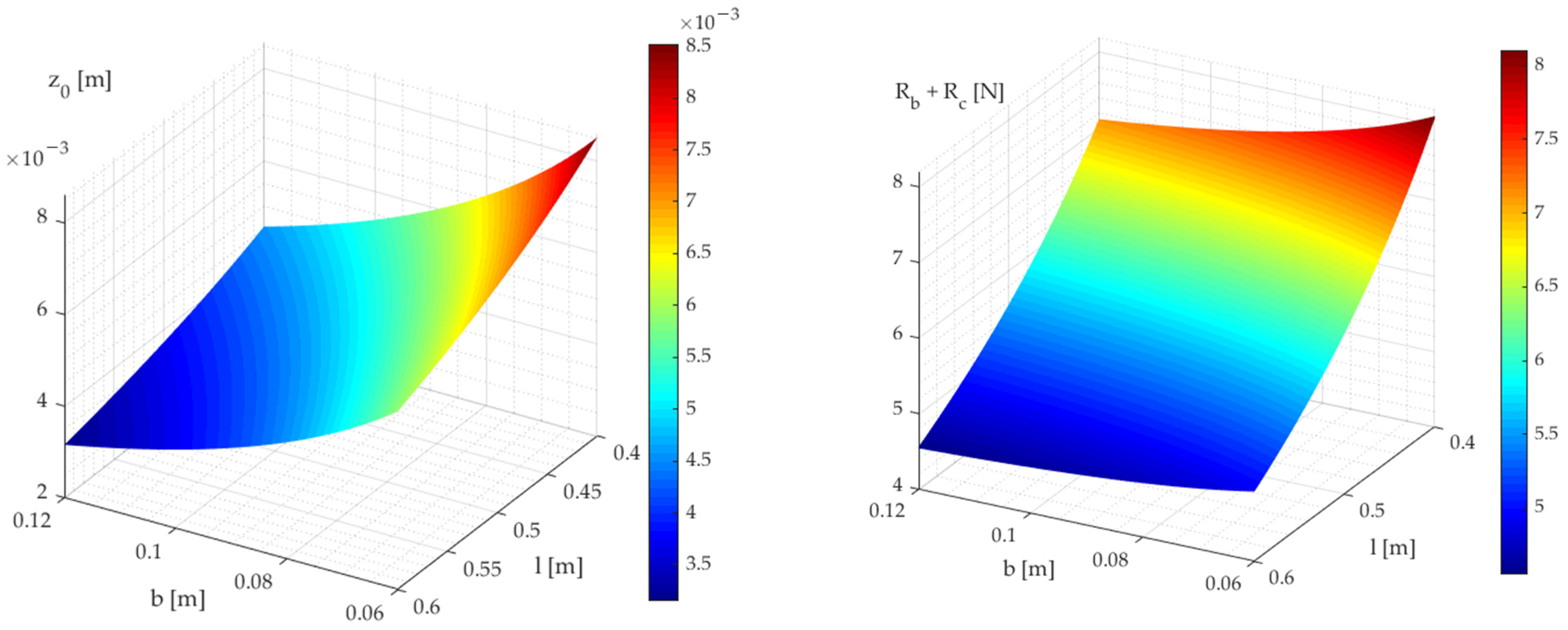
6.2.1. Motion Resistance Due to the Track–Terrain Interaction
6.2.2. Motion Resistance Due to the Internal Friction of the Tracks
6.2.3. Motion Resistance Due to the External Forces
6.2.4. Overall Robot Motion Resistance
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Federation of Robotics, World Robotics 2021, Industrial Robots and Service Robots. Available online: https://www.ifr.org (accessed on 11 April 2022).
- Mobile Robots Market by Operating Environment (Aerial, Ground, and Marine), Component (Control System, Sensors), Type (Professional and Personal & Domestic Robots), Application (Domestic, Military, Logistics, Field), and Geography—Global Forecast 2023. Available online: https://www.marketsandmarkets.com/Market-Reports/mobile-robots-market-43703276.html (accessed on 11 April 2022).
- Quaglia, G.; Visconte, C.; Scimmi, L.S.; Melchiorre, M.; Cavallone, P.; Pastorelli, S. Design of a UGV powered by solar energy for precision agriculture. Robotics 2020, 9, 13. [Google Scholar] [CrossRef]
- Wang, T.; Chen, B.; Zhang, Z.; Li, H.; Zhang, M. Applications of Machine Vision in Agricultural Robot Navigation: A Review. Comput. Electron. Agric. 2022, 198, 107085. [Google Scholar] [CrossRef]
- Mateo Sanguino, T.J. 50 years of rovers for planetary exploration: A retrospective review for future directions. Robot. Auton. Syst. 2017, 94, 172–185. [Google Scholar] [CrossRef]
- Thoesen, A.; Marvi, H. Planetary Surface Mobility and Exploration: A Review. Curr. Robot. Rep. 2021, 2, 239–249. [Google Scholar] [CrossRef]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Takeshi, N.; Tomoaki, Y.; Koyanagi, E.; Mineo, F.; et al. Emergency Response to the Nuclear Accident at the Fukushima Daiichi Nuclear Power Plants using Mobile Rescue Robots. J. Field Robot. 2013, 30, 44–63. [Google Scholar] [CrossRef]
- Mattson, P.J.; Marshall, J.L. Homeland Security and Public Safety: Research. Applications and Standards; ASTM International: West Conshohocken, PA, USA, 2019. [Google Scholar]
- Gonzalez de Santos, P.; Cobano, J.A.; Garcia, E.; Estremera, J.; Armada, M.A. A six-legged robot-based system for humanitarian demining missions. Mechatronics 2007, 17, 417–430. [Google Scholar] [CrossRef]
- Saputra, R.P.; Rakicevic, N.; Kuder, I.; Bilsdorfer, J.; Gough, A.; Dakin, A.; de Cocker, E.; Rock, S.; Harpin, R.; Kormushev, P. Resqbot 2.0: An Improved Design of a Mobile Rescue Robot with an Inflatable Neck Securing Device for Safe Casualty Extraction. Appl. Sci. 2021, 11, 5414. [Google Scholar] [CrossRef]
- Chun, W.H.; Papanikolopoulos, N. Robot Surveillance and Security. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1605–1626. [Google Scholar]
- Siegwart, R.; Nourbakhsh, I.R. Introduction to Autonomous Mobile Robots, 2nd ed.; The MIT Press: London, UK, 2011. [Google Scholar]
- Bruzzone, L.; Quaglia, G. Review Article: Locomotion Systems for Ground Mobile Robots in Unstructured Environments. Mech. Sci. 2012, 3, 49–62. [Google Scholar] [CrossRef]
- Rubio, F.; Valero, F.; Llopis-Albert, C. A Review of Mobile Robots: Concepts, Methods, Theoretical Framework, and Applications. Int. J. Adv. Robot. Syst. 2019, 16, 1–22. [Google Scholar] [CrossRef]
- Campion, G.; Bastin, G.; D’Andréa-Novel, B. Structural Properties and Classification of Kinematic and Dynamic Models of Wheeled Mobile Robots. IEEE Trans. Robot. Autom. 1996, 12, 47–62. [Google Scholar] [CrossRef]
- Siciliano, B.; Kathib, O. (Eds.) Springer Handbook of Robotics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Ceccarelli, M.; Kececi, E.F. (Eds.) Designs and Prototypes of Mobile Robots; ASME Press Robotics Engineering Book Series; Momentum Press Engineering: New York, NY, USA, 2015. [Google Scholar]
- Kececi, E.F.; Ceccarelli, M. (Eds.) Mobile Robots for Dynamic Environments; ASME Press Robotics Engineering Book Series; Momentum Press Engineering: New York, NY, USA, 2015. [Google Scholar]
- Patle, B.K.; Ganesh Babu, L.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A Review: On Path Planning Strategies for Navigation of Mobile Robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Kunchev, V.; Jain, L.; Ivancevic, V.; Finn, A. Path Planning and Obstacle Avoidance for Autonomous Mobile Robots: A Review. In Knowledge-Based Intelligent Information and Engineering Systems; Gabrys, B., Howlett, R.J., Jain, L.C., Eds.; KES 2006; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4252. [Google Scholar]
- Nakhaeinia, D.; Tang, S.H.; Noor, S.B.; Motlagh, O. A Review of Control Architectures for Autonomous Navigation of Mobile Robots. Int. J. Phys. Sci. 2011, 6, 169–174. [Google Scholar]
- Surveillance Security Robots Robotic Platform. Available online: https://www.inspectorbots.com/Home.html (accessed on 22 June 2022).
- Fukuoka, Y.; Oshino, K.; Ibrahim, A.N. Negotiating Uneven Terrain by a Simple Teleoperated Tracked Vehicle with Internally Movable Center of Gravity. Appl. Sci. 2022, 12, 525. [Google Scholar] [CrossRef]
- Ben-Tzvi, P.; Saab, W. A Hybrid Tracked-Wheeled Multi-Directional Mobile Robot. J. Mech. Robot. 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Lee, D. Mobile Robot with Passively Articulated Driving Tracks for High Terrainability and Maneuverability on Unstructured Rough Terrain: Design, Analysis, and Performance Evaluation. J. Mech. Sci. Technol. 2018, 32, 5389–5400. [Google Scholar] [CrossRef]
- Hirose, S.; Shirasu, T.; Fukushima, E.F. Proposal for Cooperative Robot “Gunryu” composed of autonomous segments. Robot. Auton. Syst. 1996, 17, 107–118. [Google Scholar] [CrossRef]
- Haji, T.; Kinugasa, T.; Yoshida, K.; Amano, H.; Osuka, K. Experiment of Maneuverability of Flexible Mono-Tread Mobile Track and Differential-Type Tracked Vehicle. Ind. Robot. 2010, 37, 263–272. [Google Scholar] [CrossRef]
- Nodehi, S.E.; Bruzzone, L.; Fanghella, P. SnakeTrack, A Bio-inspired, Single Track Mobile Robot with Compliant Vertebral Column for Surveillance and Inspection. Mech. Mach. Sci. 2022, 120, 513–520. [Google Scholar] [CrossRef]
- Neumann, M.; Predki, T.; Heckes, L.; Labenda, P. Snake-like, Tracked, Mobile Robot with Active Flippers for Urban Search-and-Rescue Tasks. Ind. Robot. 2013, 40, 246–250. [Google Scholar] [CrossRef]
- Han, X.; Lin, M.; Wu, X.; Yang, J. Design of An Articulated-Tracked Mobile Robot with Two Swing Arms. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 684–689. [Google Scholar]
- Mitriakov, A.; Papadakis, P.; Kerdreux, J.; Garlatti, S. Reinforcement Learning Based, Staircase Negotiation Learning: Simulation and Transfer to Reality for Articulated Tracked Robots. IEEE Robot. Autom. Mag. 2021, 28, 10–20. [Google Scholar] [CrossRef]
- Yuan, Y.; Xu, Q.; Schwertfeger, S. Configuration-Space Flipper Planning on 3D Terrain. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics, Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 318–325. [Google Scholar]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Tadokoro, S.; Nishimura, T.; Yoshida, T. Redesign of Rescue Mobile Robot Quince—Toward Emergency Response to the Nuclear Accident at Fukushima Daiichi Nuclear Power Station on March 2011. In Proceedings of the 9th IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 13–18. [Google Scholar]
- Guo, W.; Qiu, J.; Xu, X.; Wu, J. TALBOT: A Track-Leg Transformable Robot. Sensors 2022, 22, 1470. [Google Scholar] [CrossRef]
- Ben-Tzvi, P.; Goldenberg, A.A.; Zu, J.W. Design, simulations and optimization of a tracked mobile robot manipulator with hybrid locomotion and manipulation capabilities. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA 2008), Pasadena, CA, USA, 19–23 May 2008; pp. 2307–2312. [Google Scholar] [CrossRef]
- Sun, Z.; Yang, H.; Ma, Y.; Wang, X.; Mo, Y.; Li, H.; Jiang, Z. BIT-DMR: A Humanoid Dual-Arm Mobile Robot for Complex Rescue Operations. IEEE Robot. Autom. Lett. 2022, 7, 802–809. [Google Scholar] [CrossRef]
- Sasaki, T.; Fujita, T. Gap Traversing Motion via a Hexapod Tracked Mobile Robot Based on Gap Width Detection. J. Robot. Mechatron. 2021, 33, 665–675. [Google Scholar] [CrossRef]
- Hong, S.; Wu, M.; Xiao, J.; Xu, X.; Lu, H. Kylin: A Transformable Track-Wheel Hybrid Robot. In Proceedings of the International Conference on Advanced Mechatronic Systems (ICAMechS 2018), Zhengzhou, China, 30 August–2 September 2018; pp. 7–12. [Google Scholar]
- Bruzzone, L.; Baggetta, M.; Nodehi, S.E.; Bilancia, P.; Fanghella, P. Functional Design of a Hybrid Leg-Wheel-Track Ground Mobile Robot. Machines 2021, 9, 10. [Google Scholar] [CrossRef]
- Gong, Z.; Xie, F.; Liu, X.J.; Shentu, S. Obstacle-Crossing Strategy and Formation Parameters Optimization of a Multi-Tracked-Mobile-Robot System with a Parallel Manipulator. Mech. Mach. Theory 2020, 152, 103919. [Google Scholar] [CrossRef]
- Li, Z.; Jing, X.; Sun, B.; Yu, J. Autonomous Navigation of a Tracked Mobile Robot with Novel Passive Bio-Inspired Suspension. IEEE/ASME Trans. Mechatron. 2020, 25, 2633–2644. [Google Scholar] [CrossRef]
- Li, Y.; Li, M.; Zhu, H.; Hu, E.; Tang, C.; Li, P.; You, S. Development and applications of rescue robots for explosion accidents in coal mines. J. Field Robot. 2020, 37, 466–489. [Google Scholar] [CrossRef]
- Gao, X.; Cui, D.; Guo, W.; Mu, Y.; Li, B. Dynamics and Stability Analysis on Stairs Climbing of Wheel-Track Mobile Robot. Int. J. Adv. Robot. Syst. 2017, 14, 1–13. [Google Scholar] [CrossRef]
- Malik, S.M.; Jun, L.; Goldenberg, A.A. Virtual Prototyping for Conceptual Design of a Tracked Mobile Robot. In Proceedings of the Canadian Conference on Electrical and Computer Engineering, Ottawa, ON, Canada, 7–10 May 2006; pp. 2349–2352. [Google Scholar]
- Kim, J.; Kim, Y.; Kwak, J.; Hong, D.; An, J. Wheel & Track hybrid robot platform for optimal navigation in an urban environment. In Proceedings of the SICE Annual Conference, Taipei, Taiwan, 18–21 August 2010; pp. 881–884. [Google Scholar]
- Zong, C.; Ji, Z.; Yu, H. Dynamic Stability Analysis of a Tracked Mobile Robot Based on Human–Robot Interaction. Assem. Autom. 2020, 40, 143–154. [Google Scholar]
- Galati, R.; Mantriota, G.; Reina, G. Design and Development of a Tracked Robot to Increase Bulk Density of Flax Fibers. J. Mech. Robot. 2021, 13, 1–10. [Google Scholar] [CrossRef]
- Galati, R.; Reina, G. Terrain Awareness Using a Tracked Skid-Steering Vehicle with Passive Independent Suspensions. Front. Robot. AI 2019, 6, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, S.; Wang, L.; Wu, X.; Li, Y.; Mei, T. A Novel Tracked Wall-Climbing Robot with Bio-inspired Spine Feet. In Proceedings of the International Conference on Intelligent Robotics and Applications ICIRA 2019, Shenyang, China, 8–11 August 2019; pp. 84–96. [Google Scholar] [CrossRef]
- Shi, J.; Xu, L.; Liu, J.; Cheng, G.; Liang, X.; Liu, L.; Chen, S.; Xu, H. Design, Simulation and Experimentation of a Biomimetic Wall-Climbing Robot with Tracked Spines. In Proceedings of the 2020 IEEE International Conference on Power, Intelligent Computing and Systems, ICPICS 2020, Shenyang, China, 28–30 July 2020; pp. 744–750. [Google Scholar] [CrossRef]
- Kumar, V.; Agarwal, S.; Vadapalli, R.; Govindan, N.; Krishna, K.M. Design and Analysis of Modular Pipe Climber-III with a Multi-Output Differential Mechanism. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Delft, The Netherlands, 12–16 July 2021. [Google Scholar]
- Bogdan, P.A.; Wheadon, J.; Klein, F.B.; Gianni, M. Magnetic Tracked Robot for Internal Pipe Inspection. In Proceedings of the 10th European Conference on Mobile Robots, Bonn, Germany, 31 August–3 September 2021. [Google Scholar] [CrossRef]
- Taheri, H.; Zhao, C.X. Omnidirectional Mobile Robots, Mechanisms and Navigation Approaches. Mech. Mach. Theory 2020, 153, 103958. [Google Scholar] [CrossRef]
- Fiedeń, M.; Bałchanowski, J. A Mobile Robot with Omnidirectional Tracks—Design and Experimental Research. Appl. Sci. 2021, 11, 11778. [Google Scholar] [CrossRef]
- Tadakuma, K.; Tadakuma, R.; Nagatani, K.; Yoshida, K.; Iagnemma, K. Crawler Mechanism with Circular Section to Realize a Sideling Motion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008. [Google Scholar]
- Steeds, W. Tracked Vehicles. Automob. Eng. 1950 (3 parts) April 1950, pp. 143–148, May 1950, 187–190, June 1950, 219–222.
- Weiss, K.R. Skid-steering. Automob. Eng. 1971, 61, 22–25. [Google Scholar]
- Crosheck, J.E. Skid Steering of Crawlers. Trans. SAE 1975, 84, 1390–1404. [Google Scholar]
- Kitano, M.; Jyozaki, H. A Theoretical Analysis of Steerability of Tracked Vehicles. J. Terramechanics 1976, 13, 241–258. [Google Scholar] [CrossRef]
- Ehlert, W.; Hug, B.; Schmid, I.C. Field Measurements and Analytical Models as a Basis of Test Stand Simulation of the Turning Resistance of Tracked Vehicles. J. Terramechanics 1992, 29, 57–69. [Google Scholar] [CrossRef]
- Wong, J.Y.; Chiang, C.F. A General Theory for Skid Steering of Tracked Vehicles on Firm Ground. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 343–355. [Google Scholar] [CrossRef]
- Thai, T.D.; Muro, T. Numerical Analysis to Predict Turning Characteristics of Rigid Suspension Tracked Vehicle. J. Terramechanics 1999, 36, 183–196. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, Y.; Wang, D.; Yang, S. Unified Dynamic Simulation Analysis of Tracked Mobile Robot Based on RecurDyn. Mach. Des. Res. 2016, 32, 35–39. [Google Scholar]
- Tang, S.; Guo, Z.; Wang, G.; Wang, X. Comparative Performance Analysis of Different Travelling Mechanisms Based on RecurDyn. IOP Conf. Ser. Mater. Sci. Eng. 2020, 782, 042059. [Google Scholar] [CrossRef]
- Moskvin, I.; Lavrenov, R.; Magid, E.; Svinin, M. Modelling a Crawler Robot Using Wheels as Pseudo-Tracks: Model Complexity vs Performance. In Proceedings of the 7th IEEE International Conference on Industrial Engineering and Applications, Bangkok, Thailand, 16–21 April 2020. [Google Scholar] [CrossRef]
- Torres-Torriti, M.; Arredondo, T.; Castillo-Pizarro, P. Survey and Comparative Study of Free Simulation Software for Mobile Robots. Robotica 2016, 34, 791–822. [Google Scholar] [CrossRef]
- Iqbal, J.; Xu, R.; Sun, S.; Li, C. Simulation of an Autonomous Mobile Robot for LiDAR-Based in-Field Phenotyping and Navigation. Robotics 2020, 9, 46. [Google Scholar] [CrossRef]
- Costa, V.; Rossetti, R.; Sousa, A. Simulator for Teaching Robotics, ROS and Autonomous Driving in a Competitive Mindset. Int. J. Technol. Hum. Interact. 2017, 13, 19–32. [Google Scholar] [CrossRef][Green Version]
- Rivera, Z.B.; De Simone, M.C.; Guida, D. Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments. Machines 2019, 7, 42. [Google Scholar] [CrossRef]
- Bekker, M.G. Theory of Land Locomotion; University of Michigan Press: Ann Arbor, MI, USA, 1962. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley: New York, NY, USA, 2001. [Google Scholar]
- Bekker, M.G. Off-the-Road Locomotion: Research and Development in Terramechanics; University of Michigan Press: Ann Arbor, MI, USA, 1960. [Google Scholar]
- Quaglia, G.; Franco, W.; Nisi, M. Evolution of Wheelchair.q, a Stair-climbing Wheelchair. In Proceedings of the 14th IFToMM World Congress, Taipei, Taiwan, 25–30 October 2015; pp. 135–144. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bruzzone, L.; Nodehi, S.E.; Fanghella, P. Tracked Locomotion Systems for Ground Mobile Robots: A Review. Machines 2022, 10, 648. https://doi.org/10.3390/machines10080648
Bruzzone L, Nodehi SE, Fanghella P. Tracked Locomotion Systems for Ground Mobile Robots: A Review. Machines. 2022; 10(8):648. https://doi.org/10.3390/machines10080648
Chicago/Turabian StyleBruzzone, Luca, Shahab Edin Nodehi, and Pietro Fanghella. 2022. "Tracked Locomotion Systems for Ground Mobile Robots: A Review" Machines 10, no. 8: 648. https://doi.org/10.3390/machines10080648
APA StyleBruzzone, L., Nodehi, S. E., & Fanghella, P. (2022). Tracked Locomotion Systems for Ground Mobile Robots: A Review. Machines, 10(8), 648. https://doi.org/10.3390/machines10080648