
Common Educational Teleoperation Platform for Robotics Utilizing Digital Twins

 , , ,
, , ,
Abstract
:1. Introduction
- Implementation of robot teleoperation platform utilizing DT’s
- Method for time-resource management of teleoperated equipment
- Cybersecurity road-map for teleoperation platform
- Teleoperation platform based on open-source software
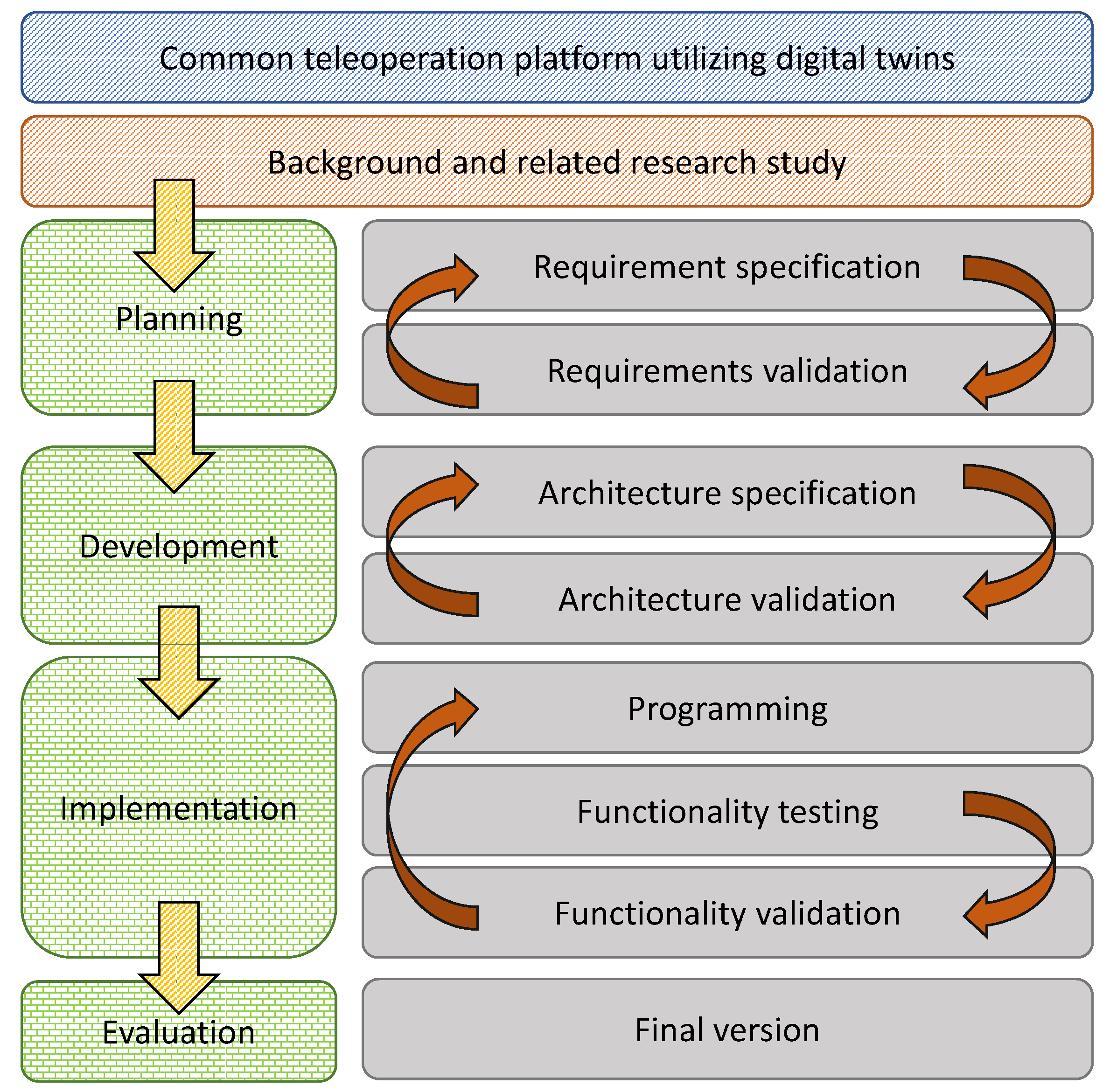
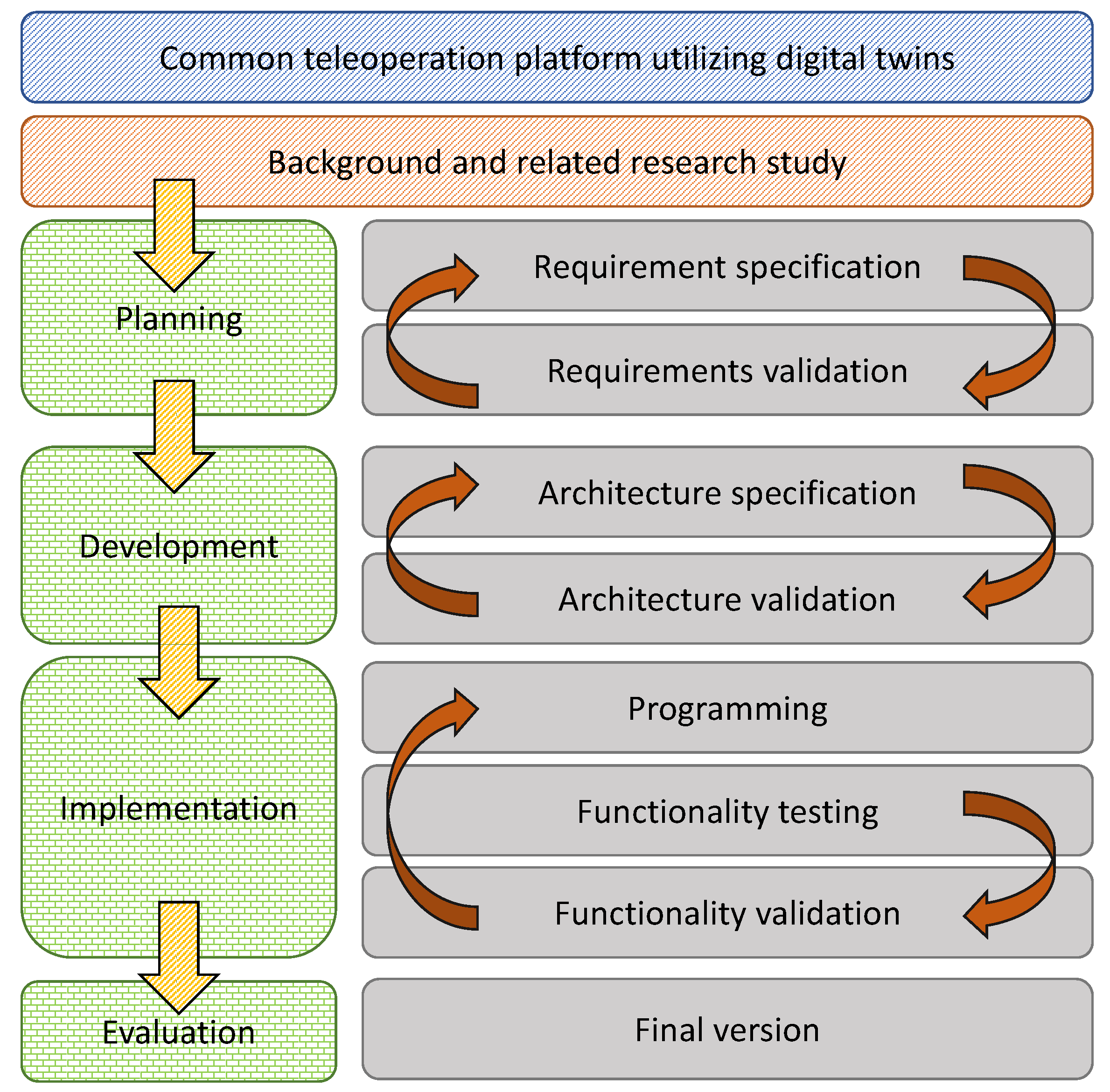
2. Methods and Approach
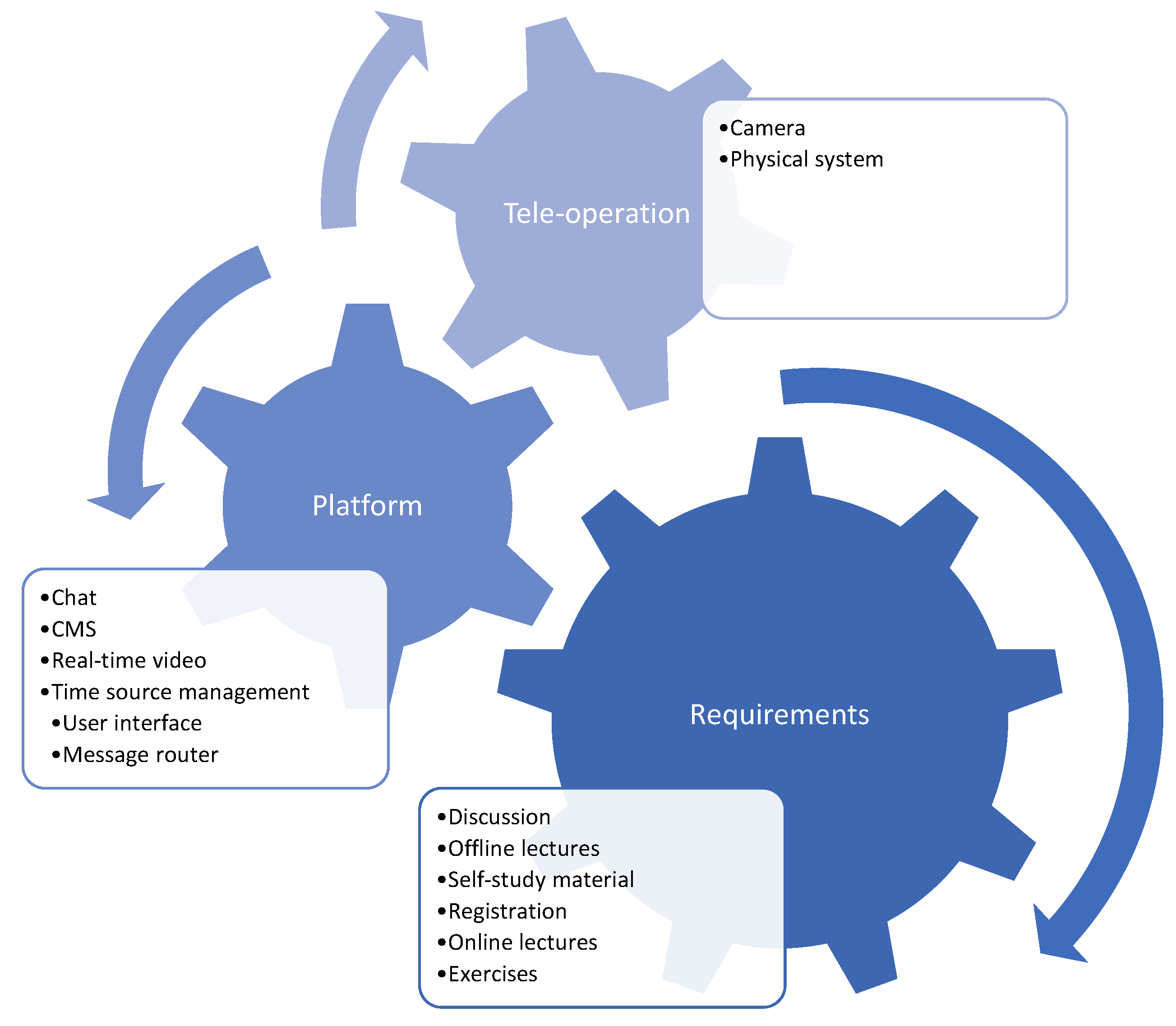
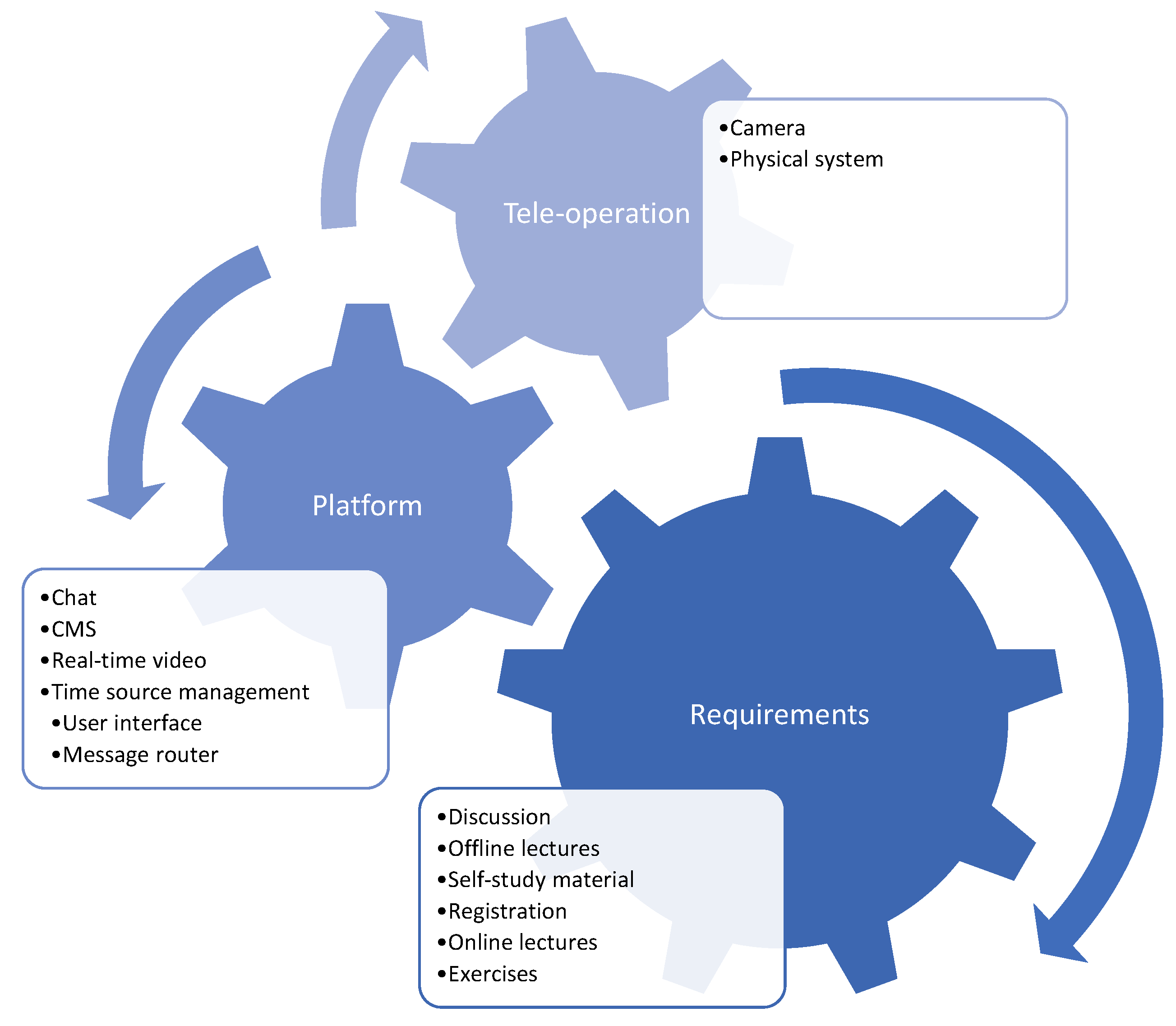
2.1. Requirement Specification
3. Background and Related Research
3.1. Digital Twin
- Digital twin is a virtual presentation of real-world entities and processes, synchronized at specified frequency and fidelity
- Physical twin is a set of real-world entities and processes that correspond to a digital twin
- Digital twin platform is a set of integrated services, applications, and other digital twin subsystems that are designed to be used to implement digital twin systems
- Digital twin system is a system-of-systems that implements digital twin
- Cyber-Physical system is a system consisting of physical and digital systems integrated via networking.
Data Flow between Physical and Digital Twin
3.2. Teleoperation
Real-Time Video
3.3. Authentication and Authorization
4. Implementation and Validation
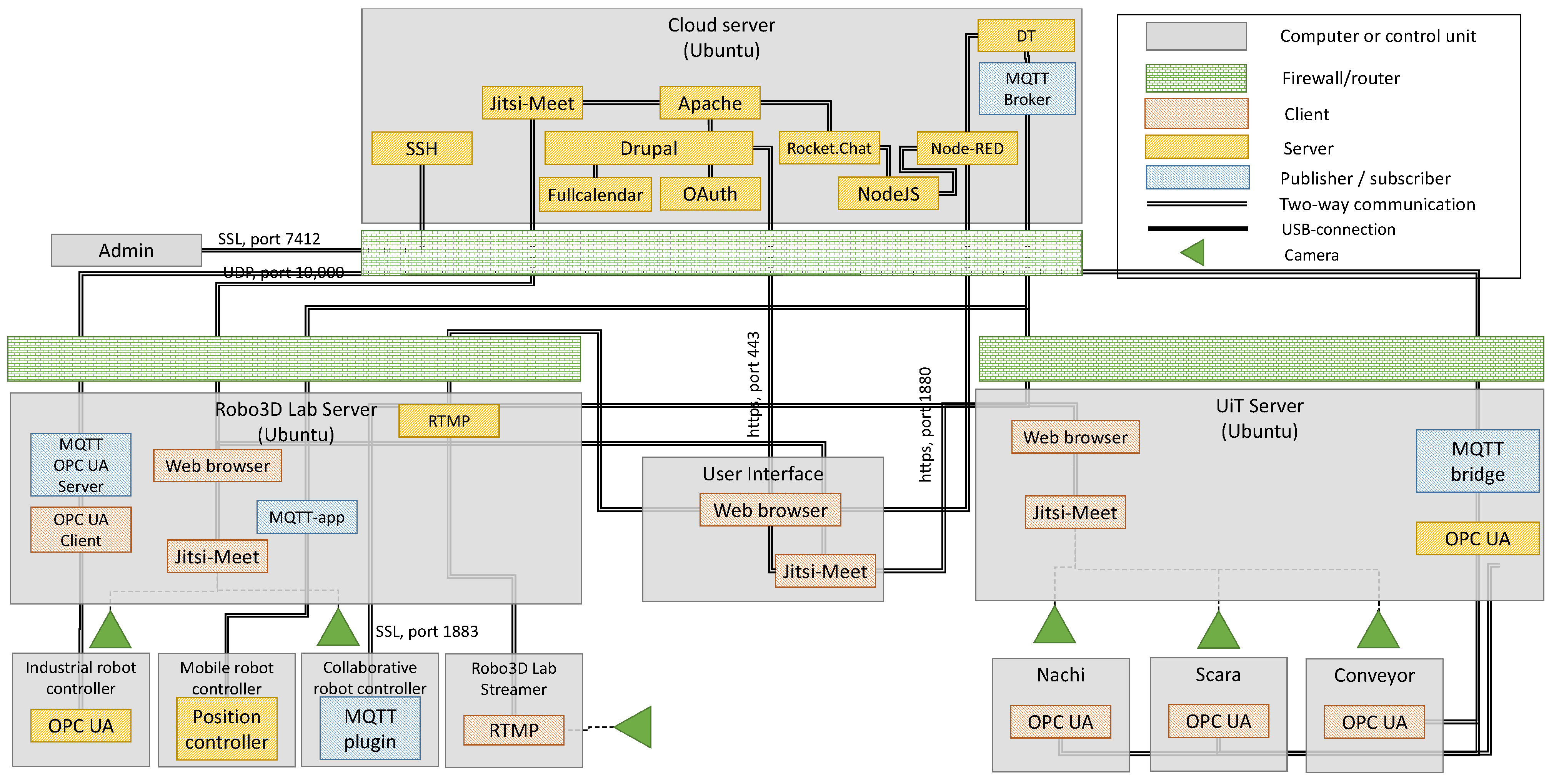
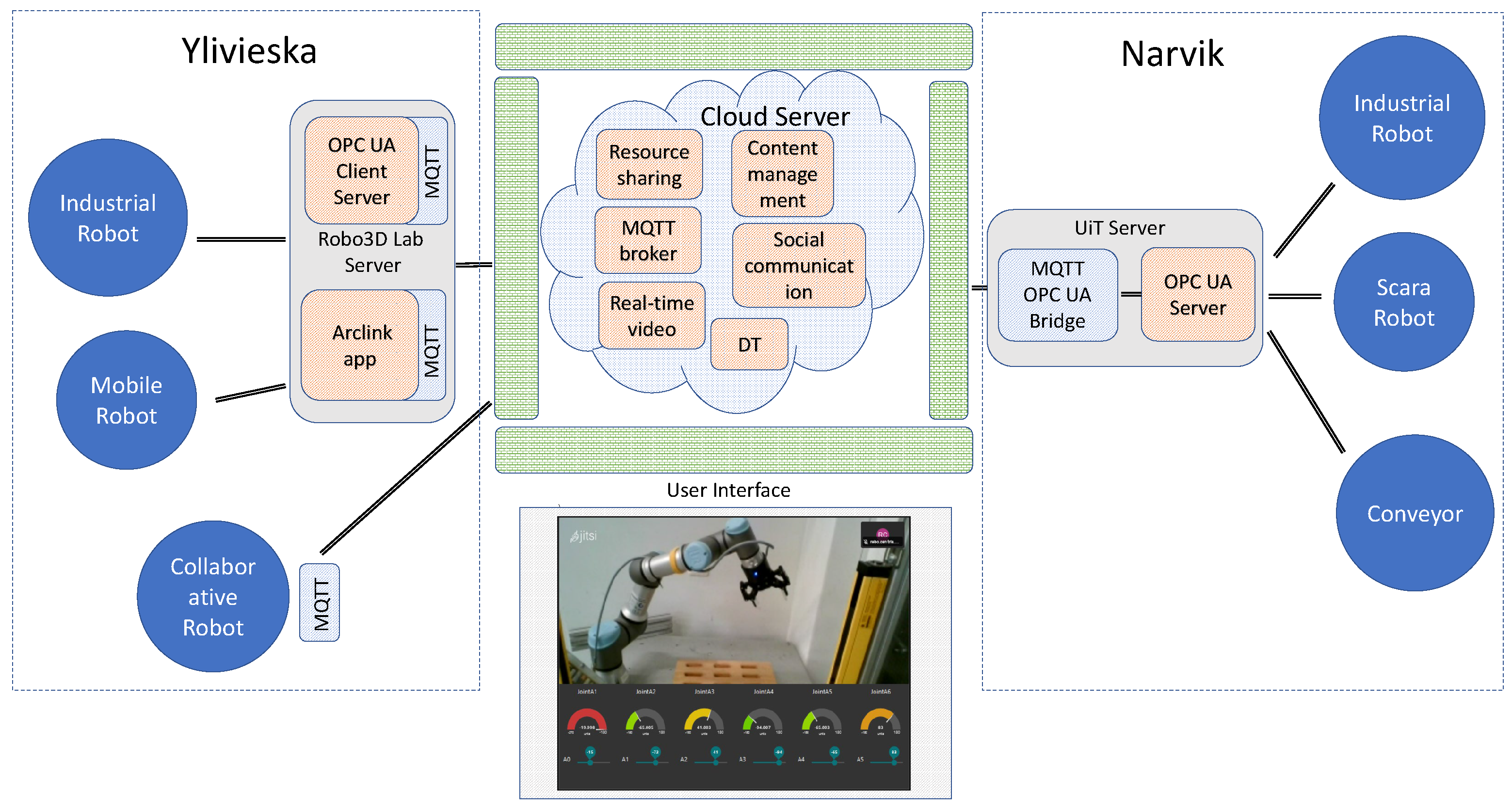
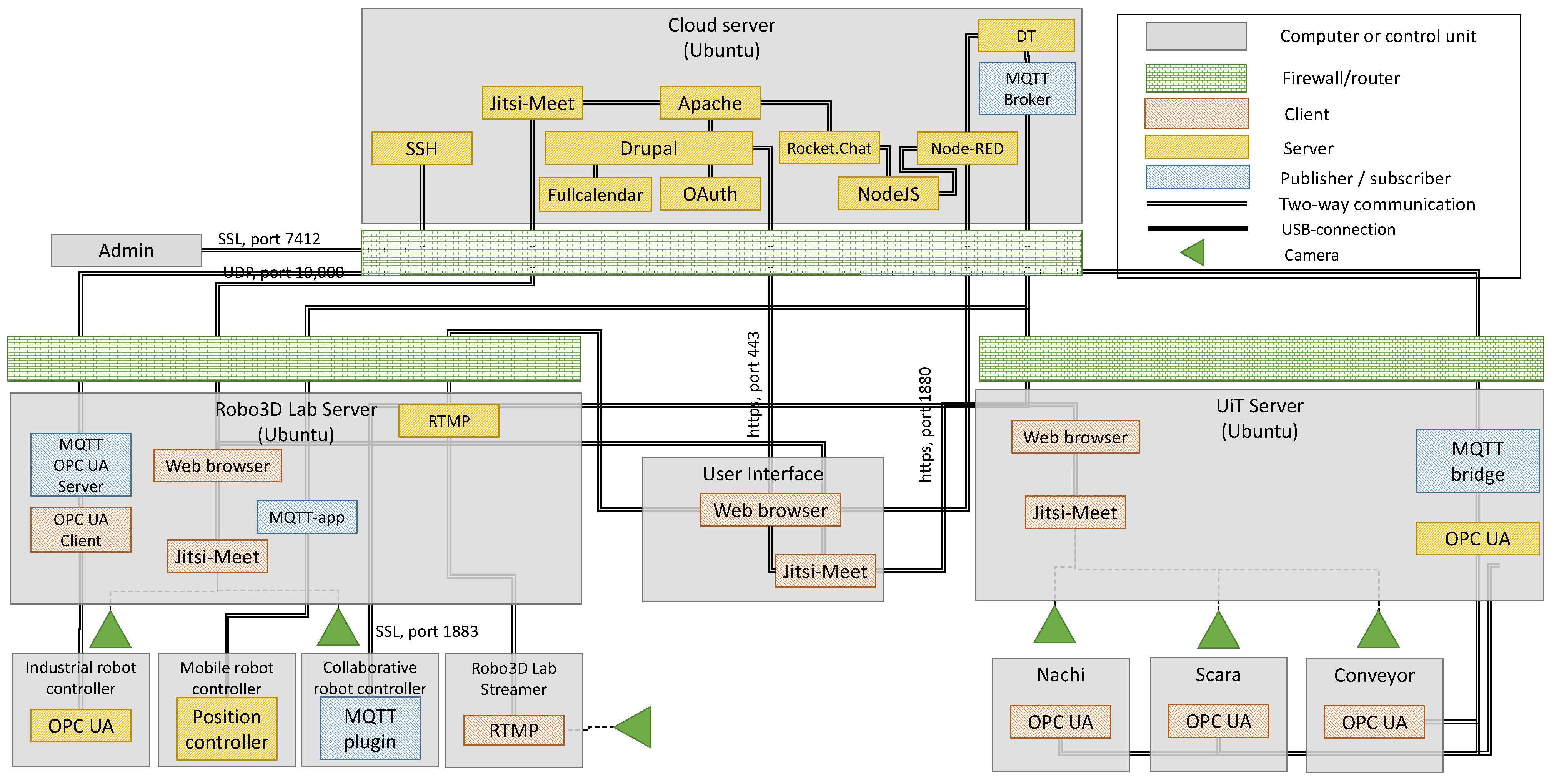
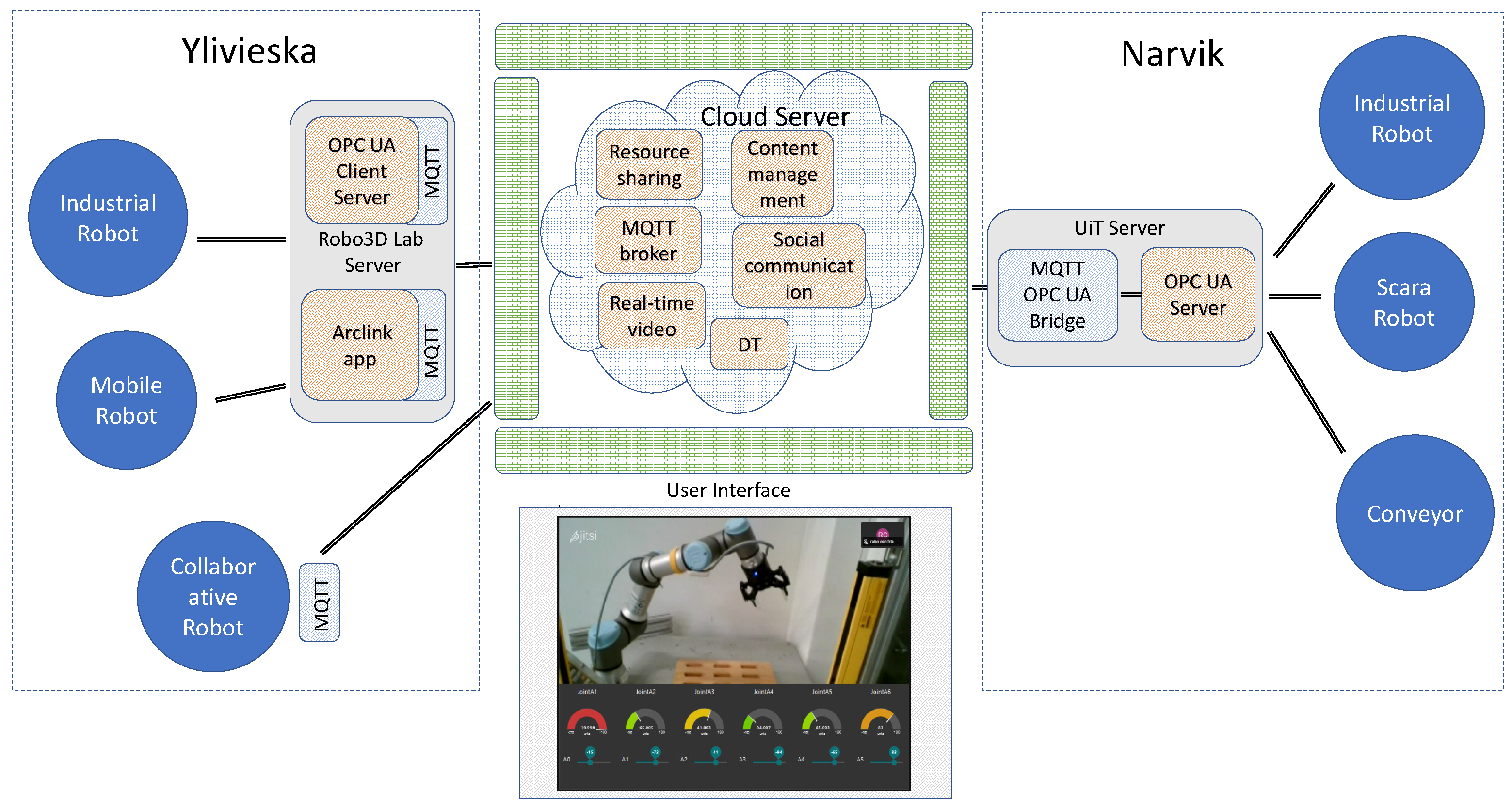
4.1. System Architecture
4.2. Cloud Server
4.2.1. Content Management System
4.2.2. Time Resource Management
4.2.3. Real-Time Video Server
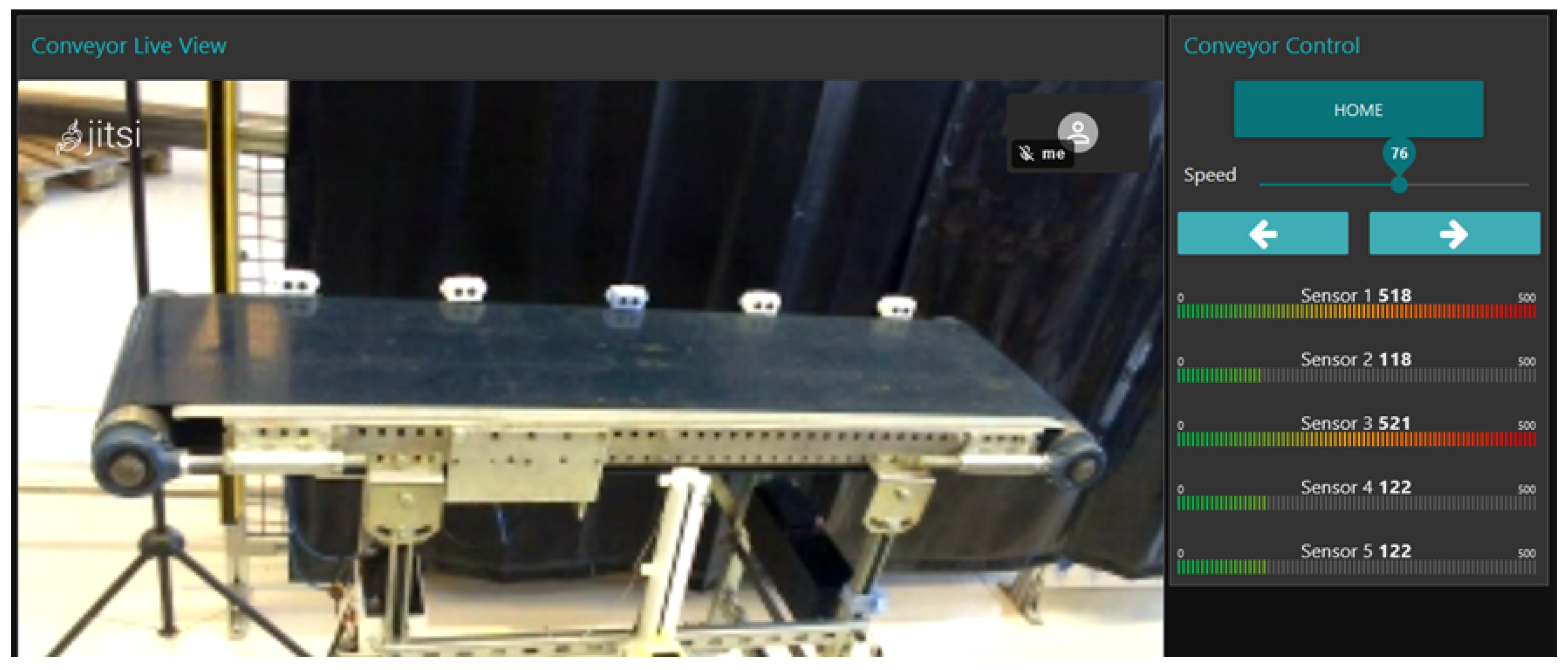
4.2.4. Teleoperation User Interface
4.2.5. Cloud Data Transfer
4.2.6. Social Communication
4.2.7. Vulnerability Scans
4.3. UiT Manufacturing Laboratory
4.3.1. Industrial Robot
4.3.2. Scara Robot
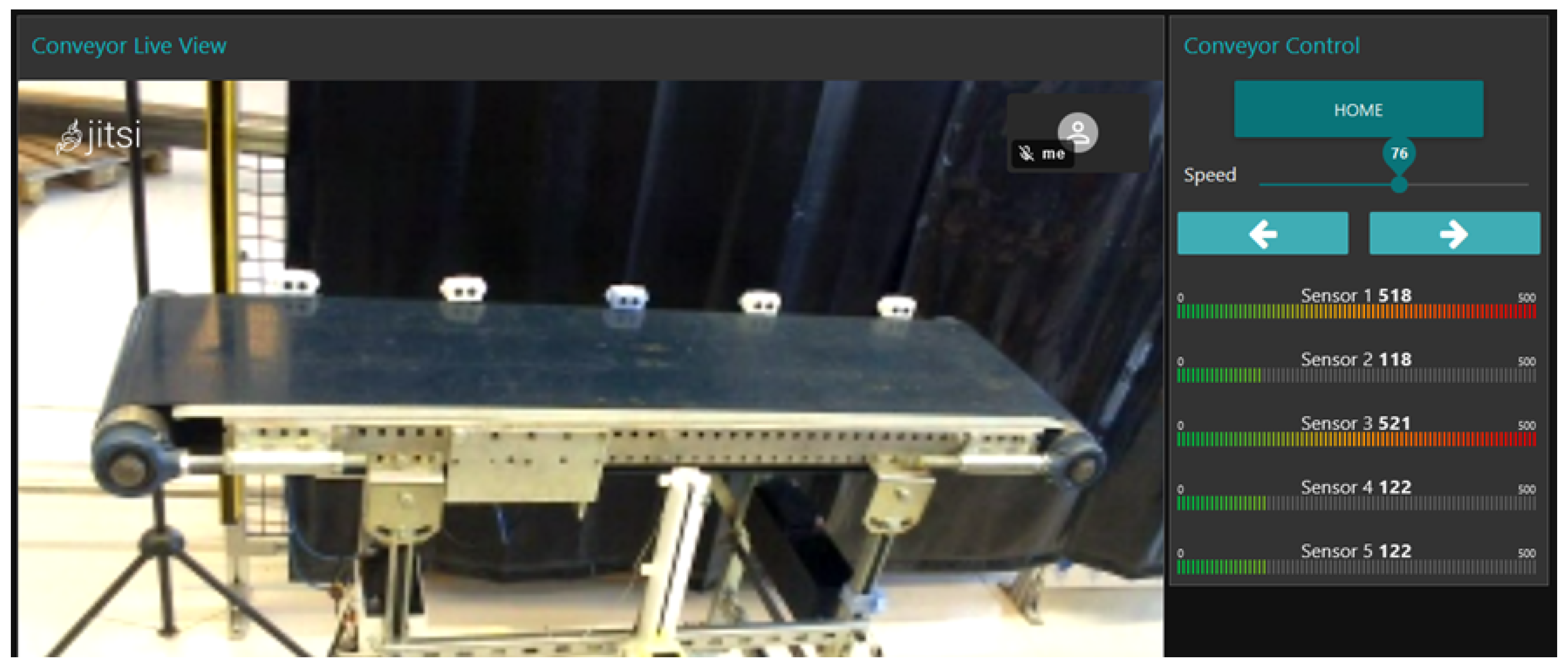
4.3.3. Conveyor
4.3.4. UiT Server
4.4. Centria Robo3D Lab
4.4.1. Industrial Robot
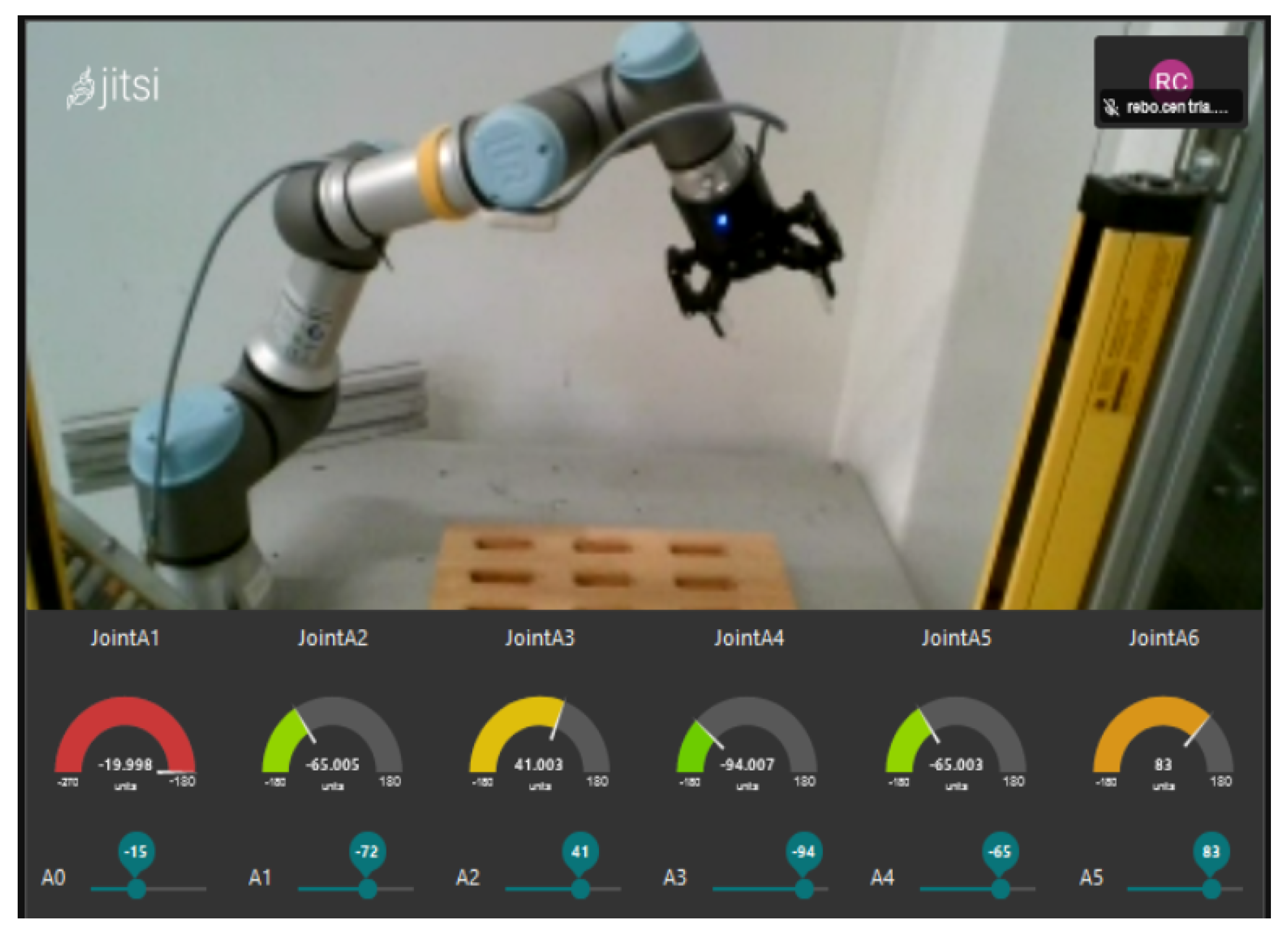
4.4.2. Collaborative Robot
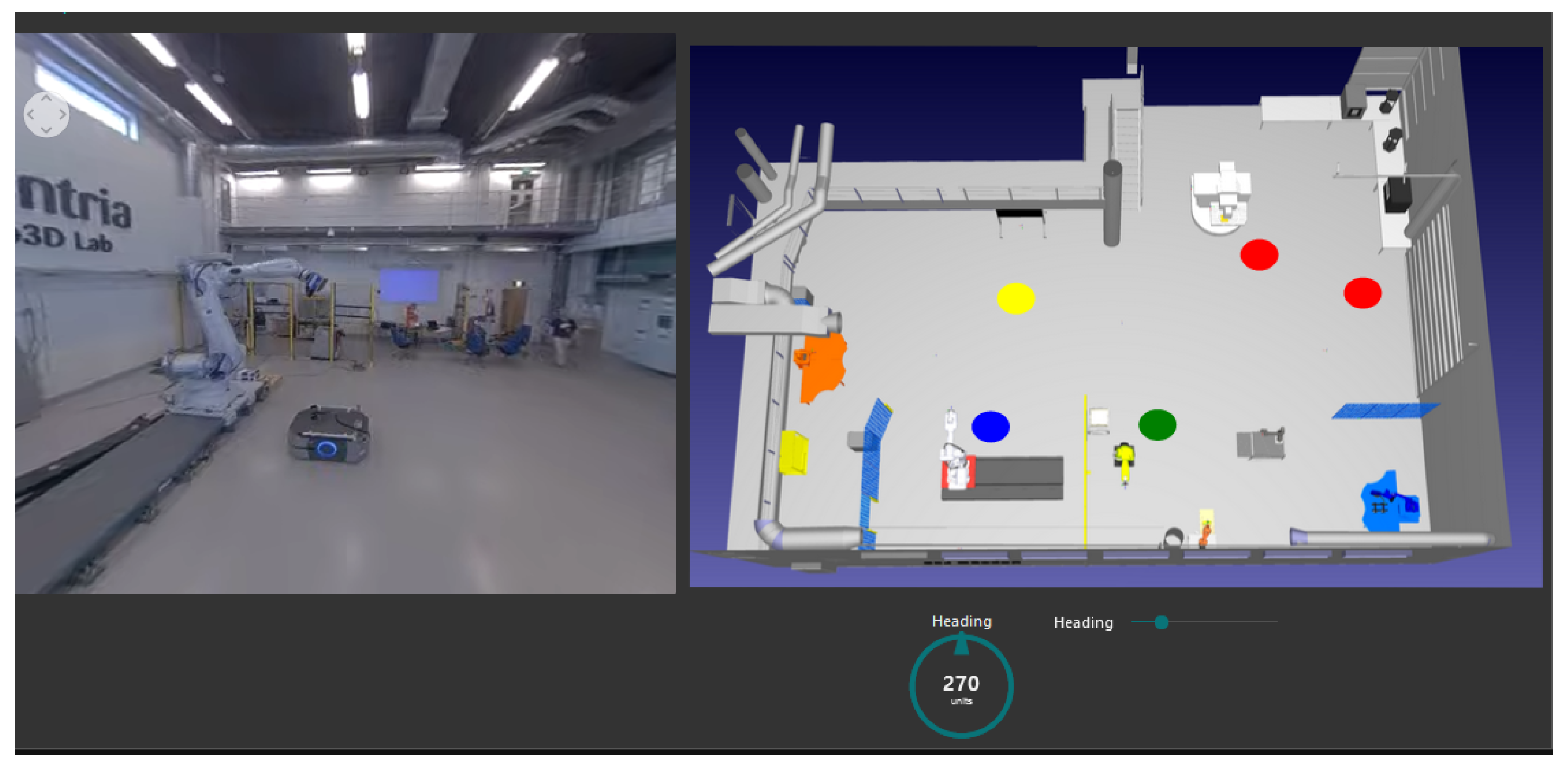
4.4.3. Mobile Robot
4.5. Digital Twinning
4.6. Functionality Validation
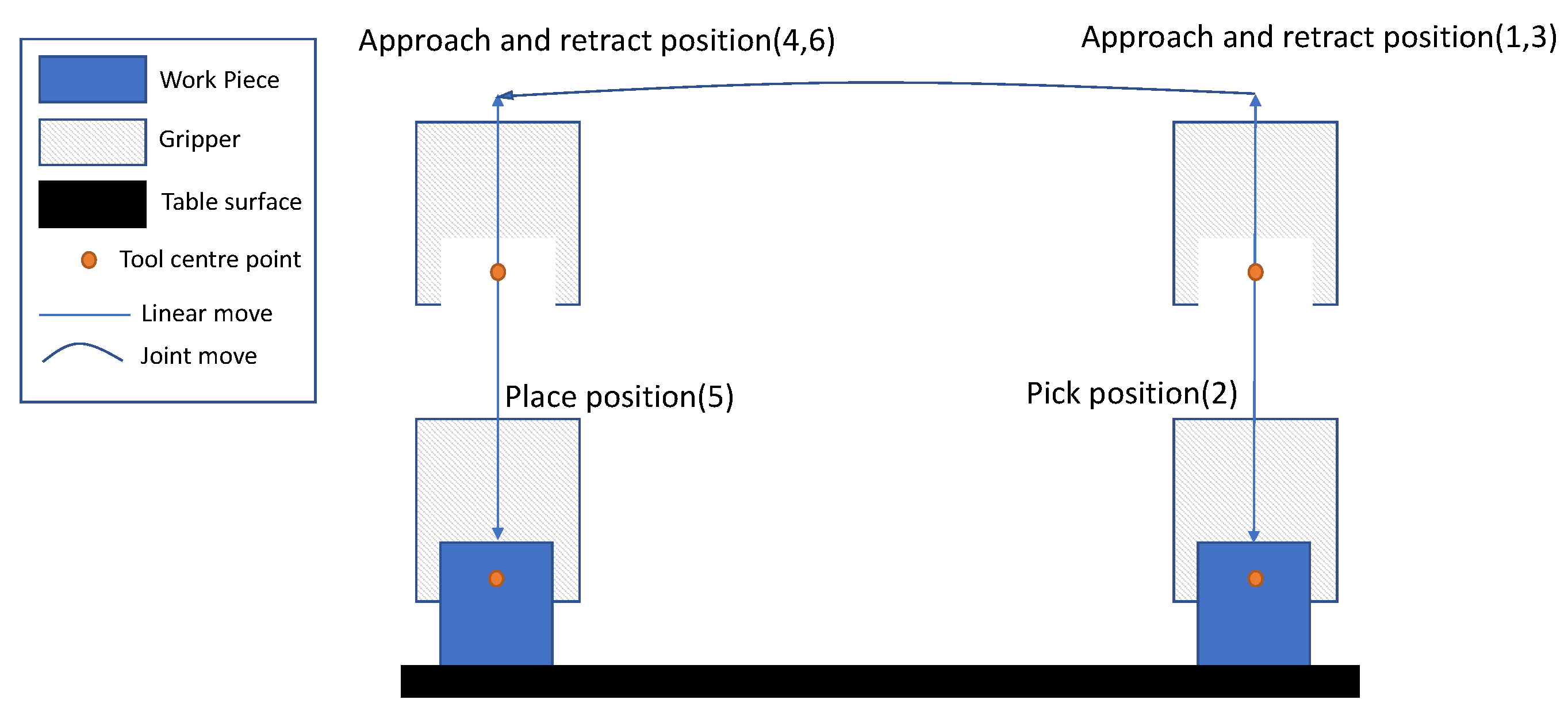
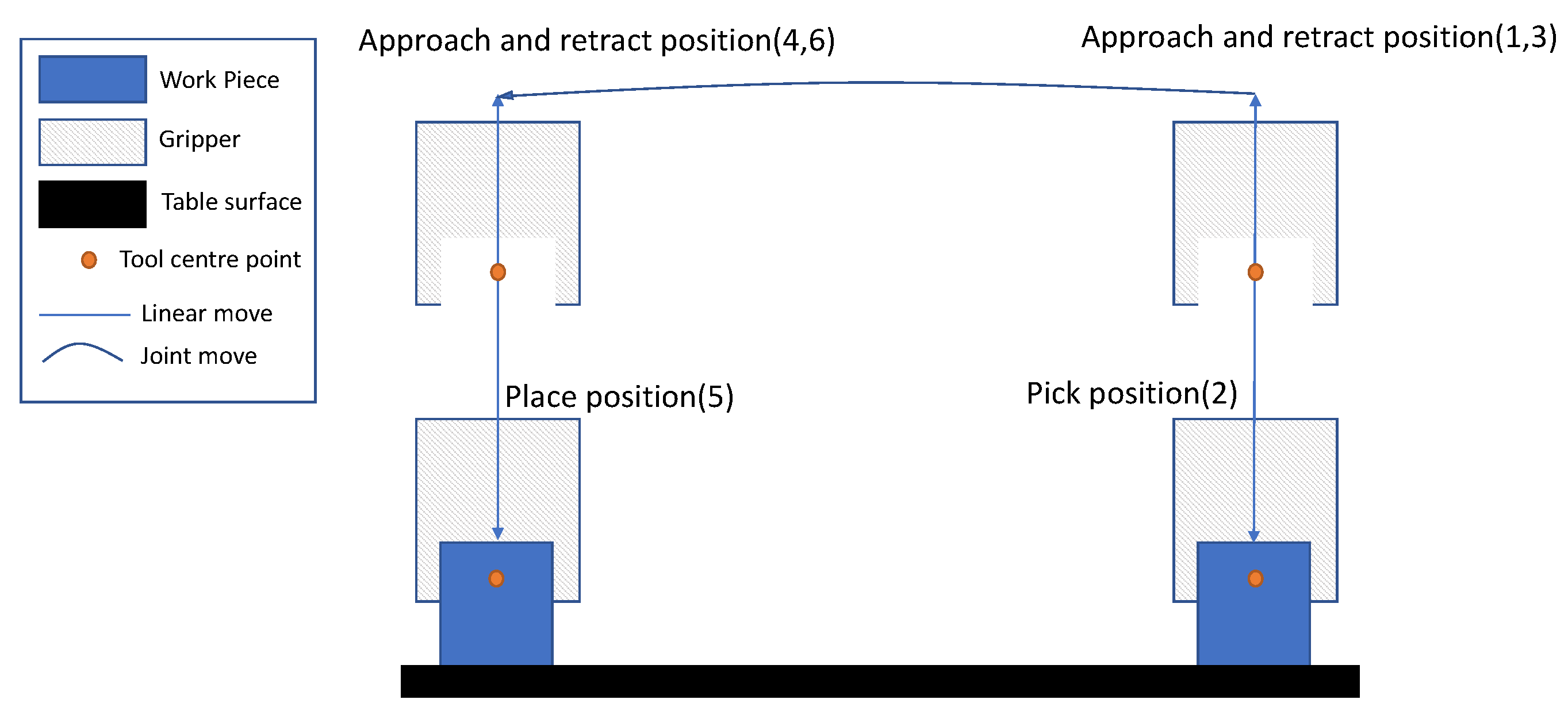
4.6.1. Industrial Robots
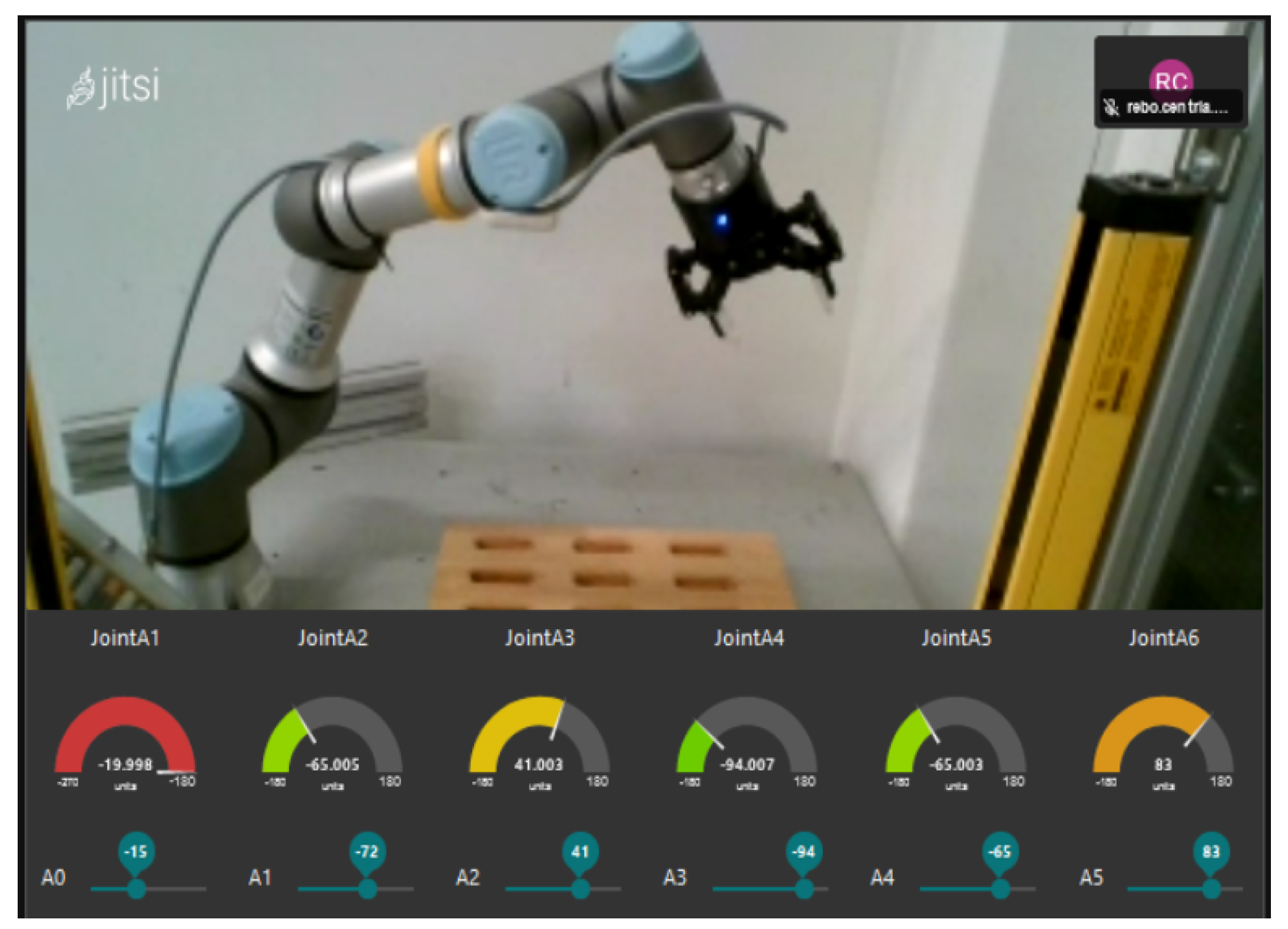
4.6.2. Collaborative Robot
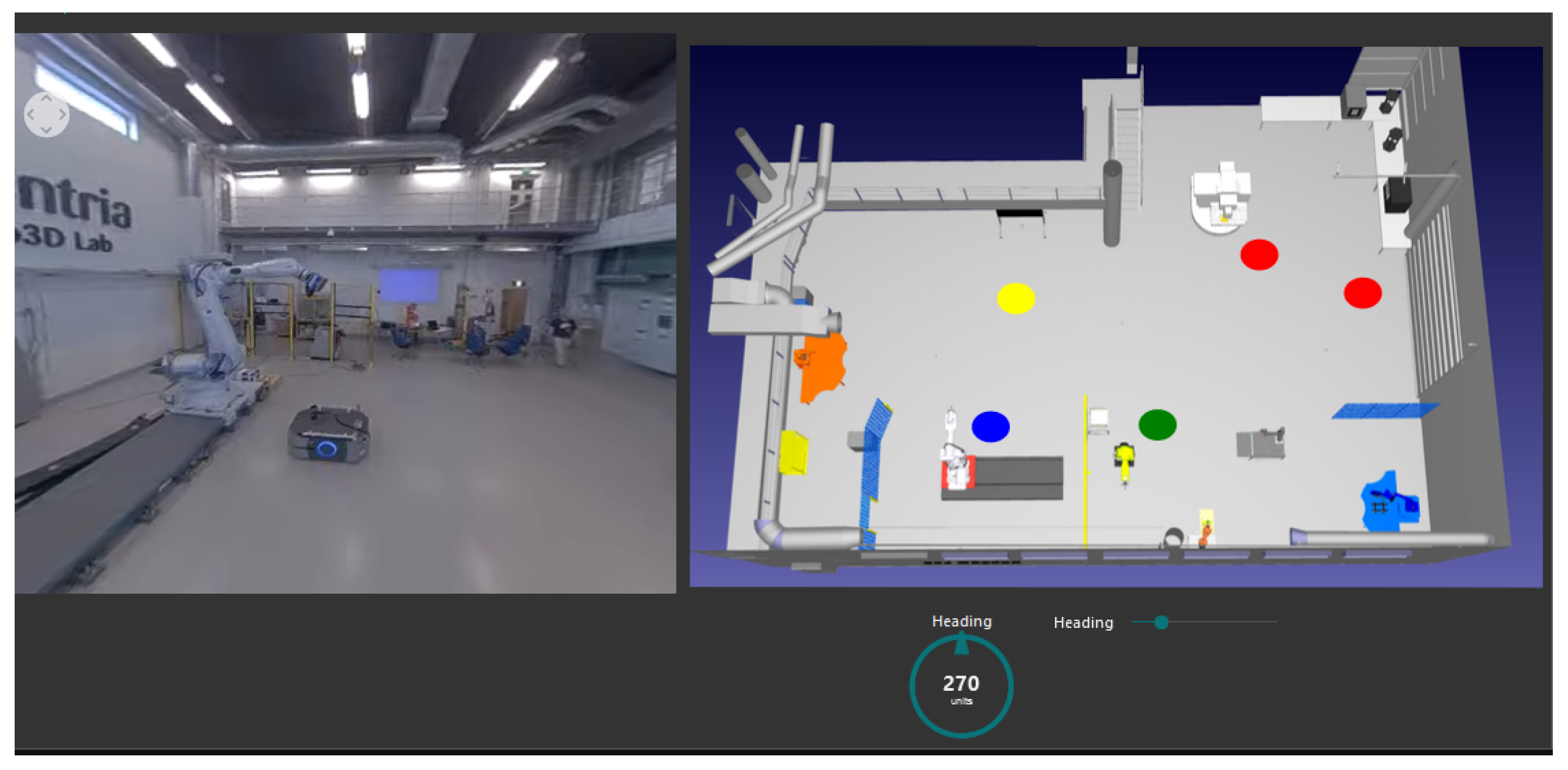
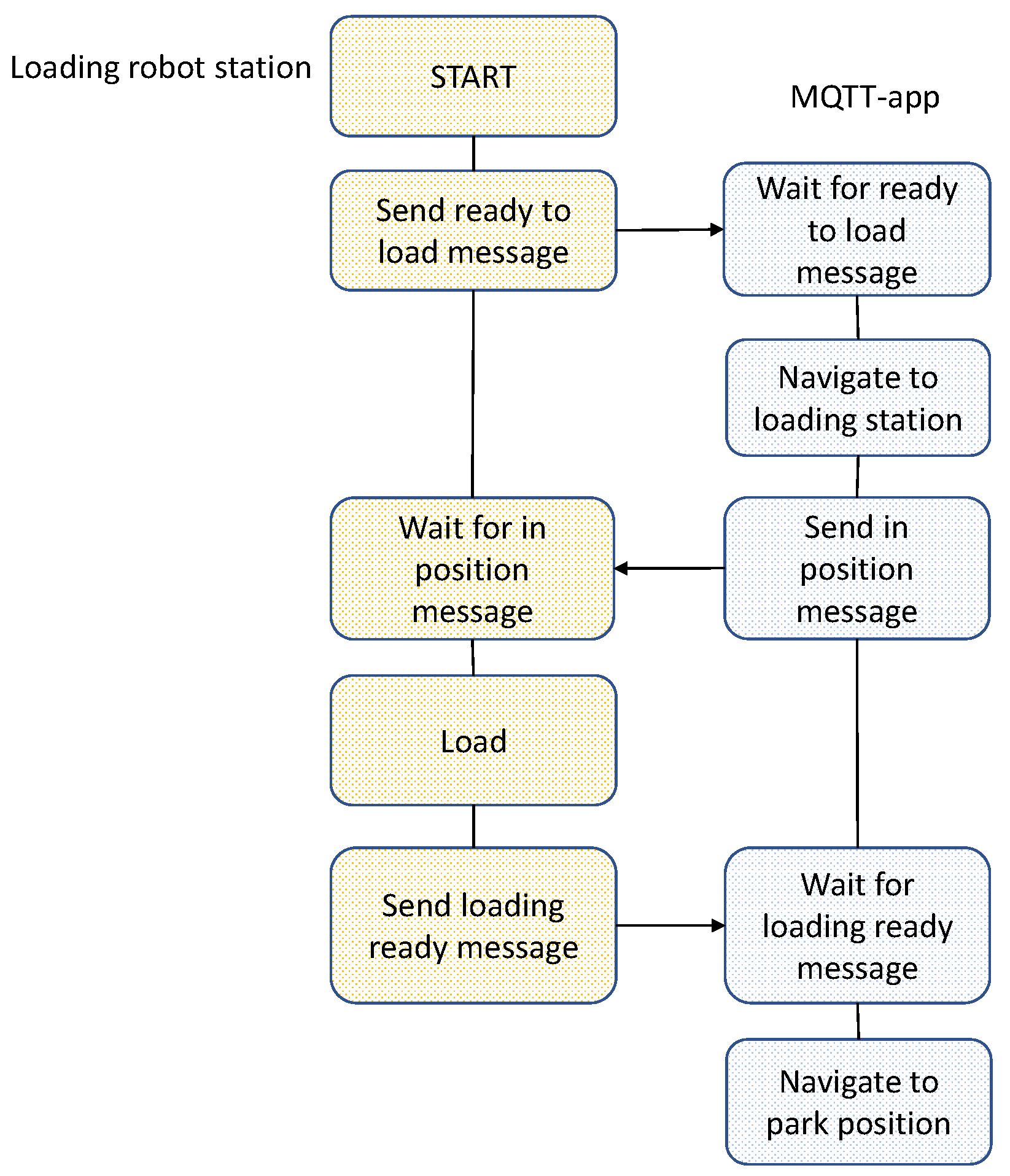
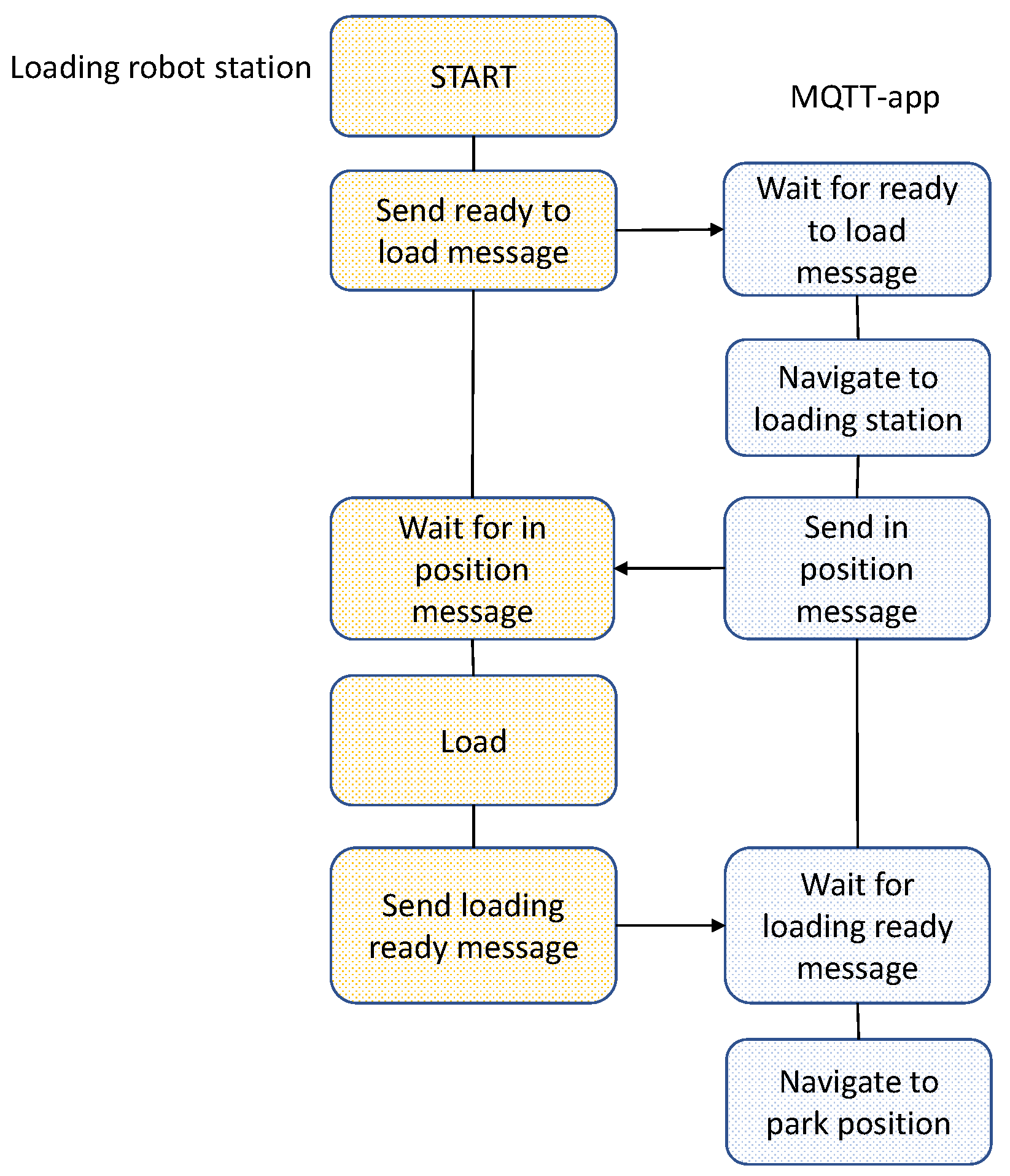
4.6.3. Mobile Robot
4.6.4. Scara Robot and Conveyor
5. Discussion
5.1. MQTT Is an Efficient Communication Protocol for DT
5.2. Latency of Video Stream Is Critical in Teleoperation
5.3. Cybersecurity Is a Key-Enabler
5.4. Privacy and Safety Concerns
5.5. Based on Open-Source
5.6. Is Teleoperation Platform Utilizing DT’s Suitable for Robotics Education and Training?
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- 2022 Annual Threat Assessment of the U.S. Intelligence Community. Available online: https://www.dni.gov/files/ODNI/documents/assessments/ATA-2022-Unclassified-Report.pdf (accessed on 2 May 2022).
- Ashour, A.G.; Mirou, S.M.; Hassan, R.N.; Zeiada, W.; Abuzwidah, M.; Shanableh, A. Assessment of Potential Temperature Increases in The UAE due to Future Global Warming. In Proceedings of the 2022 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 21–24 February 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Ariza, J.Á.; Gil, S.G. RaspyLab: A low-cost remote laboratory to learn programming and physical computing through Python and Raspberry Pi. IEEE Rev. Iberoam. Tecnol. Aprendiz. 2022, 17, 140–149. [Google Scholar] [CrossRef]
- Baburajan, P.K.; Noushad, S.; Faisal, T.; Awawdeh, M. Online Teaching and Learning: Effectiveness and Challenges. In Proceedings of the 2022 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 21–24 February 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Guc, F.; Viola, J.; Chen, Y. Digital Twins Enabled Remote Laboratory Learning Experience for Mechatronics Education. In Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 15 July–15 August 2021; pp. 242–245. [Google Scholar] [CrossRef]
- Larrondo-Petrie, M.M.; Zapata-Rivera, L.F.; Aranzazu-Suescun, C.; Sanchez-Viloria, J.A.; Molina-Peña, A.E.; Santana-Santana, K.S. Addressing the need for online engineering labs for developing countries. In Proceedings of the 2021 World Engineering Education Forum/Global Engineering Deans Council (WEEF/GEDC), Madrid, Spain, 15–18 November 2021; pp. 387–396. [Google Scholar] [CrossRef]
- Onime, C.E.; Uhomoibhi, J.O. Engineering education in a developing country: Experiences from Africa. In Proceedings of the 2012 15th International Conference on Interactive Collaborative Learning (ICL), Villach, Austria, 26–28 September 2012; pp. 1–3. [Google Scholar] [CrossRef]
- Bryndin, E. System Synergetic Formation of Society 5.0 for Development of Vital Spaces on Basis of Ecological Economic and Social Programs. Ann. Ecol. Environ. Sci. 2018, 2, 12–19. [Google Scholar]
- Moniruzzaman, M.; Rassau, A.; Chai, D.; Islam, S.M.S. Teleoperation methods and enhancement techniques for mobile robots: A comprehensive survey. Robot. Auton. Syst. 2022, 150, 103973. [Google Scholar] [CrossRef]
- Marín, R.; Sanz, P.; Nebot, P.; Esteller, R.; Wirz, R. Multirobot System Architecture & Performance Issues for the UJI Robotics TeleLab. IFAC Proc. Vol. 2004, 37, 53–58. [Google Scholar] [CrossRef]
- Rambe, P.; Bere, A. Using mobile instant messaging to leverage learner participation and transform pedagogy at a South African University of Technology. Br. J. Educ. Technol. 2013, 44, 544–561. [Google Scholar] [CrossRef]
- Tang, Y.; Hew, K.F. Is mobile instant messaging (MIM) useful in education? Examining its technological, pedagogical, and social affordances. Educ. Res. Rev. 2017, 21, 85–104. [Google Scholar] [CrossRef]
- Qi, Q.; Tao, F. Digital Twin and Big Data Towards Smart Manufacturing and Industry 4.0: 360 Degree Comparison. IEEE Access 2018, 6, 3585–3593. [Google Scholar] [CrossRef]
- Mullet, V.; Sondi, P.; Ramat, E. A Review of Cybersecurity Guidelines for Manufacturing Factories in Industry 4.0. IEEE Access 2021, 9, 23235–23263. [Google Scholar] [CrossRef]
- Arnarson, H.; Kanafi, F.S.; Kaarlela, T.; Seldeslachts, U.; Pieters, R. Evaluation of cyber security in agile manufacturing: Maturity of Technologies and Applications. In Proceedings of the 2022 IEEE/SICE International Symposium on System Integration (SII), Narvik, Norway, 9–12 January 2022; pp. 784–789. [Google Scholar] [CrossRef]
- García, A.; Solanes, J.E.; Muñoz, A.; Gracia, L.; Tornero, J. Augmented Reality-Based Interface for Bimanual Robot Teleoperation. Appl. Sci. 2022, 12, 4379. [Google Scholar] [CrossRef]
- Grieves, M. Origins of the Digital Twin Concept; 2016; Unpublished. [Google Scholar] [CrossRef]
- Grieves, M. Excerpt From Forthcoming Paper Intelligent Digital Twins and the Development and Management of Complex Systems The “Digital Twin Exists ONLY After There Is A Physical Product” Fallacy. 2021. Available online: https://digitaltwin1.org/articles/2-8 (accessed on 7 April 2022).
- Cimino, C.; Negri, E.; Fumagalli, L. Review of digital twin applications in manufacturing. Comput. Ind. 2019, 113, 103130. [Google Scholar] [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in manufacturing: A categorical literature review and classification. IFAC-PapersOnLine 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Alcaraz, C.; Lopez, J. Digital Twin: A Comprehensive Survey of Security Threats. IEEE Commun. Surv. Tutor. 2022. early access. [Google Scholar] [CrossRef]
- Protic, A.; Jin, Z.; Marian, R.; Abd, K.; Campbell, D.; Chahl, J. Implementation of a Bi-Directional Digital Twin for Industry 4 Labs in Academia: A Solution Based on OPC UA. In Proceedings of the 2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, 14–17 December 2020; pp. 979–983. [Google Scholar] [CrossRef]
- Laaki, H.; Miche, Y.; Tammi, K. Prototyping a Digital Twin for Real Time Remote Control Over Mobile Networks: Application of Remote Surgery. IEEE Access 2019, 7, 20325–20336. [Google Scholar] [CrossRef]
- Digital Twin Consortium. Glossary of Digital Twins. 2021. Available online: https://www.digitaltwinconsortium.org/glossary/glossary.html#digital-twin (accessed on 15 February 2022).
- Gomez, F. AI-Driven Digital Twins and the Future of Smart Manufacturing. 2021. Available online: https://www.machinedesign.com/automation-iiot/article/21170513/aidriven-digital-twins-and-the-future-of-smart-manufacturing (accessed on 30 April 2022).
- How Digital Twins Are Driving the Future of Engineering. 2021. Available online: https://www.nokia.com/networks/insights/technology/how-digital-twins-driving-future-of-engineering/ (accessed on 30 April 2022).
- ISO 23247-1:2021; Automation Systems and Integration—Digital Twin Framework for Manufacturing—Part 1: Overview and General Principles. International Organization for Standardization: Geneva, Switzerland, 2000.
- Holmes, D.; Papathanasaki, M.; Maglaras, L.; Ferrag, M.A.; Nepal, S.; Janicke, H. Digital Twins and Cyber Security—Solution or challenge? In Proceedings of the 2021 6th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Preveza, Greece, 24–26 September 2021. [Google Scholar] [CrossRef]
- Mühlbauer, N.; Kirdan, E.; Pahl, M.O.; Carle, G. Open-Source OPC UA Security and Scalability. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020; Volume 1, pp. 262–269. [Google Scholar] [CrossRef]
- IBM. Transcript of IBM Podcast. 2011. Available online: https://www.ibm.com/podcasts/software/websphere/connectivity/piper_diaz_nipper_mq_tt_11182011.pdf (accessed on 22 February 2022).
- Alkhafajee, A.R.; Al-Muqarm, A.M.A.; Alwan, A.H.; Mohammed, Z.R. Security and Performance Analysis of MQTT Protocol with TLS in IoT Networks. In Proceedings of the 2021 4th International Iraqi Conference on Engineering Technology and Their Applications (IICETA), Najaf, Iraq, 21–22 September 2021; pp. 206–211. [Google Scholar] [CrossRef]
- OPC Foundation. What Is OPC? Available online: https://opcfoundation.org/about/what-is-opc/ (accessed on 29 March 2022).
- Blackwell, R. Microsoft Solutions for Manufacturing Industry. In Proceedings of the IEE Colloquium on Next Generation Manufacturing: Future Trends in Manufacturing and Supply Chain Management (Digest No: 1996/278), London, UK, 22 November 1996. [Google Scholar] [CrossRef]
- Drahoš, P.; Kučera, E.; Haffner, O.; Klimo, I. Trends in industrial communication and OPC UA. In Proceedings of the 2018 Cybernetics Informatics (K & I), Lazy pod Makytou, Slovakia, 31 January–3 February 2018; pp. 1–5. [Google Scholar] [CrossRef]
- OPC Unified Architecture Specification, Part14: PubSub. 2018. Available online: https://reference.opcfoundation.org/v104/Core/docs/Part14/ (accessed on 20 February 2022).
- Goertz, R.C. Fundamentals of General-Purpose Remote Manipulators. Nucleonics 1952, 10, 36–42. [Google Scholar]
- Ferrell, W.R.; Sheridan, T.B. Supervisory control of remote manipulation. IEEE Spectr. 1967, 4, 81–88. [Google Scholar] [CrossRef]
- Sheridan, T. Teleoperation, telerobotics and telepresence: A progress report. Control Eng. Pract. 1995, 3, 205–214. [Google Scholar] [CrossRef]
- Duan, B.; Xiong, L.; Guan, X.; Fu, Y.; Zhang, Y. Tele-operated robotic ultrasound system for medical diagnosis. Biomed. Signal Process. Control 2021, 70, 102900. [Google Scholar] [CrossRef]
- Taylor, R.; Funda, J.; Eldridge, B.; Gomory, S.; Gruben, K.; LaRose, D.; Talamini, M.; Kavoussi, L.; Anderson, J. A telerobotic assistant for laparoscopic surgery. IEEE Eng. Med. Biol. Mag. 1995, 14, 279–288. [Google Scholar] [CrossRef]
- González, C.; Solanes, J.E.; Muñoz, A.; Gracia, L.; Girbés-Juan, V.; Tornero, J. Advanced teleoperation and control system for industrial robots based on augmented virtuality and haptic feedback. J. Manuf. Syst. 2021, 59, 283–298. [Google Scholar] [CrossRef]
- Yoerger, D.; Slotine, J.J. Supervisory control architecture for underwater teleoperation. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; Volume 4, pp. 2068–2073. [Google Scholar] [CrossRef]
- Clement, G.; Vertut, J.; Fournier, R.; Espiau, B.; Andre, G. An overview of CAT control in nuclear services. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; Volume 2, pp. 713–718. [Google Scholar] [CrossRef]
- Caiza, G.; Garcia, C.A.; Naranjo, J.E.; Garcia, M.V. Flexible robotic teleoperation architecture for intelligent oil fields. Heliyon 2020, 6, e03833. [Google Scholar] [CrossRef]
- Shu, B.; Arnarson, H.; Solvang, B.; Kaarlela, T.; Pieskä, S. Platform independent interface for programming of industrial robots. In Proceedings of the 2022 IEEE/SICE International Symposium on System Integration (SII), Narvik, Norway, 9–12 January 2022; pp. 797–802. [Google Scholar] [CrossRef]
- Eltenahy, S.; Fayez, N.; Obayya, M.; Khalifa, F. Comparative Analysis of Resources Utilization in Some Open-Source Videoconferencing Applications based on WebRTC. In Proceedings of the 2021 International Telecommunications Conference (ITC-Egypt), Alexandria, Egypt, 13–15 July 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Jansen, B.; Goodwin, T.; Gupta, V.; Kuipers, F.; Zussman, G. Performance Evaluation of WebRTC-based Video Conferencing. ACM SIGMETRICS Perform. Eval. Rev. 2018, 45, 56–68. [Google Scholar] [CrossRef]
- Patel, S.K.; Rathod, V.; Parikh, S. Joomla, Drupal and WordPress—A statistical comparison of open source CMS. In Proceedings of the 3rd International Conference on Trendz in Information Sciences Computing (TISC2011), Chennai, India, 8–9 December 2011; pp. 182–187. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, A.; Hashmi, H.; Khan, S.A. WordPress: A Multi-Functional Content Management System. In Proceedings of the 2021 10th International Conference on System Modeling Advancement in Research Trends (SMART), Moradabad, India, 10–11 December 2021; pp. 158–161. [Google Scholar] [CrossRef]
- Naveed Aman, M.; Taneja, S.; Sikdar, B.; Chua, K.C.; Alioto, M. Token-Based Security for the Internet of Things With Dynamic Energy-Quality Tradeoff. IEEE Internet Things J. 2019, 6, 2843–2859. [Google Scholar] [CrossRef]
- Mainka, C.; Mladenov, V.; Schwenk, J.; Wich, T. SoK: Single Sign-On Security—An Evaluation of OpenID Connect. In Proceedings of the 2017 IEEE European Symposium on Security and Privacy (EuroS P), Paris, France, 26–28 April 2017; pp. 251–266. [Google Scholar] [CrossRef]
- Caiko, J.; Patlins, A.; Nurlan, A.; Protsenko, V. Video-conference Communication Platform Based on WebRTC Online meetings. In Proceedings of the 2020 IEEE 61th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 5–7 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- OPC Foundation. UA-.NETStandard. Available online: https://github.com/OPCFoundation/UA-.NETStandard (accessed on 29 March 2022).
- Light, R. Mosquitto-Tls. Available online: https://mosquitto.org/man/mosquitto-tls-7.html (accessed on 7 April 2022).
- Configuring SSL Reverse Proxy. Available online: https://docs.rocket.chat/quick-start/environment-configuration/configuring-ssl-reverse-proxy (accessed on 7 April 2022).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Name | Description | Level |
|---|---|---|---|
| F1 | Digital twins | The system can be used as a digital twin allowing bi-directional data transmission from simulation models to physical robots and vice versa. | Must |
| F2 | Teleoperation and programming | A registered user can teleoperate and program available robots physically located in laboratories. Robot movements can be controlled directly through an user interface or using robot programs. | Must |
| F3 | Monitor | The laboratory can be remotely monitored through the system. This is implemented using cameras that are streaming to the system. | Must |
| F4 | Registration | A person can register to the system through a dedicated web-page using a valid email address. Person can create a password after receiving confirmation email. | Must |
| F5 | Role definition | Users can have different roles: user, publisher, and admin. Roles can be modified through the system by admins. | Must |
| F6 | Scheduling | Users can make reservations on available robots for teleoperation and programming through the booking calendar, including time-slot management. | Must |
| F7 | Discussion | Users can discuss or request help about different topics on discussion forum or chat. Admins can delete any thread. | Could |
| F8 | Download/upload | Digital material can be stored on, accessed in, and downloaded from the system by users. Material can be documents such as images, videos, audio, and text documents. | Could |
| F9 | Examination | Exams at different scales can be performed in the system. Different scales mean that a student can execute the course only partially. Evaluation pass/fail. | Could |
| F10 | Certificate | The system provides a participation certificate based on the examination. The certificate includes the scope on the course taken. The certificate is sent by e-mail. | Could |
| F11 | XR support | XR-techonology can be used to visualise simulations, teaching, and remote usage. | Could |
| F12 | Virtual deployment | Robots can be virtually deployed using the system. | Could |
| F13 | Group formation | User groups can be formed by all user types and groups can collaborate on same tasks. | Could |
| F14 | Group lecturing | Lecturer can arrange meetings with groups. Meetings can be used for lecturing, mentoring, steering, etc. | Could |
| F15 | Progress tracking | The system tracks users on which parts of course they have completed/studied. | Could |
| ID | Description | Category |
|---|---|---|
| N1 | The systems clearly focuses on robotics. | Usability |
| N2 | Suitable for beginners and professionals, independent of the entry level. Programming experience or prior knowledge of robotics is not required. | Usability |
| N3 | CS is taken into account. Remote users cannot access the system further than predefined robots. Additionally, robot functionality is restricted for safe operations. | Security |
| N4 | Safety taken into consideration in remote usage. | Reliability |
| N5 | Comparison of live and captured lectures. Feedback from students. | Usability |
| N6 | Support for platform usage. | Usability |
| N7 | Support for different languages (lectures, user interface). | Usability |
| N8 | Laboratory exercises can be done independently from the previous progress. Any exercise can be chosen. | Usability |
| N9 | 20 simultaneous users. | Performance |
| N10 | Possibility to transfer material from other platforms. | Usability |
| N11 | Lectures can be online, offline, and live (F2F). | Usability |
| N12 | Material will be organised in sections so that certain sections form ensembles. | Usability |
| N13 | The system is available 24/7. | Reliability |
| N14 | Email address used for registration is validated. | Usability |
| N15 | Delay in stream when observing a physical robot should be less than 250 ms. | Performance |
| N16 | Exercises can be in form of game. Either 3D featuring extended reality or 2D desktop mode. | Usability |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaarlela, T.; Arnarson, H.; Pitkäaho, T.; Shu, B.; Solvang, B.; Pieskä, S. Common Educational Teleoperation Platform for Robotics Utilizing Digital Twins. Machines 2022, 10, 577. https://doi.org/10.3390/machines10070577
Kaarlela T, Arnarson H, Pitkäaho T, Shu B, Solvang B, Pieskä S. Common Educational Teleoperation Platform for Robotics Utilizing Digital Twins. Machines. 2022; 10(7):577. https://doi.org/10.3390/machines10070577
Chicago/Turabian StyleKaarlela, Tero, Halldor Arnarson, Tomi Pitkäaho, Beibei Shu, Bjørn Solvang, and Sakari Pieskä. 2022. "Common Educational Teleoperation Platform for Robotics Utilizing Digital Twins" Machines 10, no. 7: 577. https://doi.org/10.3390/machines10070577
APA StyleKaarlela, T., Arnarson, H., Pitkäaho, T., Shu, B., Solvang, B., & Pieskä, S. (2022). Common Educational Teleoperation Platform for Robotics Utilizing Digital Twins. Machines, 10(7), 577. https://doi.org/10.3390/machines10070577