
Composite Ski-Resort Registration Method Based on Laser Point Cloud Information


Abstract
:1. Introduction
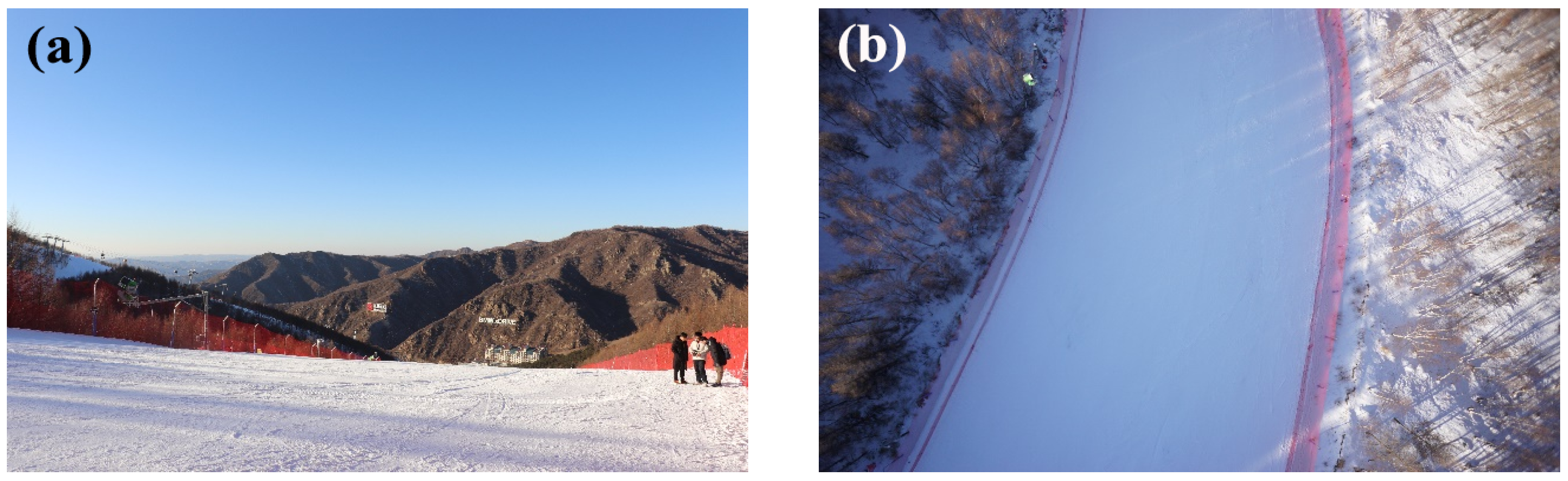
2. Study Area and Data
3. Methodology
3.1. Coarse Registration of Point Cloud in Ski Resort
3.1.1. SIFT Algorithm to Extract Feature Points
3.1.2. Feature Point Matching of Point Cloud Datasets
3.1.3. Purification of Feature Points
3.1.4. Point Cloud Coordinate Transformation
3.1.5. Overall Process of Coarse Registration Algorithm
3.2. Fine Registration
4. Results and Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miziński, B.; Niedzielski, T. Fully-automated estimation of snow depth in near real time with the use of unmanned aerial vehicles without utilizing ground control points. Cold Reg. Sci. Technol. 2017, 138, 63–72. [Google Scholar] [CrossRef]
- Pomerleau, F.; Colas, F.; Siegwart, R. A review of point cloud registration algorithms for mobile robotics. Found. Trends Robot. 2015, 4, 1–104. [Google Scholar] [CrossRef] [Green Version]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Sensor Fusion IV: Control Paradigms and Data Structures, Boston, MA, USA, 12–15 November 1991. [Google Scholar]
- Uy, M.A.; Lee, G.H. Pointnetvlad: Deep point cloud based retrieval for large-scale place recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–19 June 2019. [Google Scholar]
- Yang, P.; Ames, D.P.; Shrestha, R. Spatiotemporal analysis of stream network structure based on snow-on and snow-off LiDAR. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 9–13 December 2019. [Google Scholar]
- Yang, P.; Ames, D.P.; Shrestha, R. Teaser: Fast and certifiable point cloud registration. IEEE Trans. Robot. 2020, 37, 314–333. [Google Scholar] [CrossRef]
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. Pointnetlk: Robust & efficient point cloud registration using pointnet. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Brown, L.G. A survey of image registration techniques. ACM Comput. Surv. (CSUR) 1992, 24, 325–376. [Google Scholar] [CrossRef]
- Vander Jagt, B.; Lucieer, A.; Wallace, L.; Turner, D.; Durand, M. Snow depth retrieval with UAS using photogrammetric techniques. Geosciences 2015, 5, 264–285. [Google Scholar] [CrossRef] [Green Version]
- Boesch, R.; Bühler, Y.; Marty, M.; Ginzler, C. Comparison of digital surface models for snow depth mapping with UAV and aerial cameras. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch 2016, 8, 453–458. [Google Scholar] [CrossRef] [Green Version]
- Jacobs, J.M.; Hunsaker, A.G.; Sullivan, F.B.; Palace, M.; Burakowski, E.A.; Herrick, C.; Cho, E. Snow depth mapping with unpiloted aerial system LiDAR observations: A case study in Durham, New Hampshire, United States. Cryosphere 2021, 15, 1485–1500. [Google Scholar] [CrossRef]
- Duan, Y.; Yang, C.; Chen, H.; Yan, W.; Li, H. Low-complexity point cloud denoising for LiDAR by PCA-based dimension reduction. Opt. Commun. 2021, 482, 126–567. [Google Scholar] [CrossRef]
- Sarode, V.; Li, X.; Goforth, H.; Aoki, Y.; Srivatsan, R.A.; Lucey, S.; Choset, H. Pcrnet: Point cloud registration network using pointnet encoding. arXiv 2021, arXiv:1908.07906. [Google Scholar]
- Belmonte, A.; Sankey, T.; Biederman, J.; Bradford, J.; Goetz, S.; Kolb, T. UAV-based estimate of snow cover dynamics: Optimizing semi-arid forest structure for snow persistence. Remote Sens. 2021, 13, 1036. [Google Scholar] [CrossRef]
- Huang, X.; Mei, G.; Zhang, J.; Abbas, R. A comprehensive survey on point cloud registration. arXiv 2021, arXiv:2103.02690. [Google Scholar]
- Obuchi, M.; Emaru, T.; Ravankar, A.A. Improved scan matching performance in snowy environments using semantic segmentation. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021. [Google Scholar]
- Gelfand, N.; Mitra, N.J.; Guibas, L.J.; Pottmann, H. Robust global registration. In Proceedings of the Symposium on Geometry Processing, Vienna, Austria, 4–6 July 2005. [Google Scholar]
- Razali, A.F.; Ariff, M.F.M.; Majid, Z. A Hybrid Point Cloud Reality Capture from Terrestrial Laser Scanning and Uav-Photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 46, 459–463. [Google Scholar] [CrossRef]
- Ye, Z.; Liu, C.; Tian, W.; Kan, C. In-situ point cloud fusion for layer-wise monitoring of additive manufacturing. J. Manuf. Syst. 2021, 61, 210–222. [Google Scholar] [CrossRef]
- Min, T.; Song, C.; Kim, E.; Shim, I. Distinctiveness oriented positional equilibrium for point cloud registration. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Li, J.; Hu, Q.; Ai, M. Point cloud registration based on one-point ransac and scale-annealing biweight estimation. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9716–9729. [Google Scholar] [CrossRef]
- Efraim, A.; Francos, J.M. Dual Transformation and Manifold Distances Voting for Outlier Rejection in Point Cloud Registration. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Kukko, A.; Anttila, K.; Manninen, T.; Kaasalainen, S.; Kaartinen, H. Snow surface roughness from mobile laser scanning data. Cold Reg. Sci. Technol. 2013, 96, 23–35. [Google Scholar] [CrossRef]
- Wu, B.; Ma, J.; Chen, G.; An, P. Feature Interactive Representation for Point Cloud Registration. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Larsson, H.; Steinvall, O.K.; Chevalier, T.R.; Gustafsson, F. Characterizing laser radar snow reflection for the wavelengths 0.9 and 1.5 μm. Opt. Eng. 2006, 45, 116201. [Google Scholar] [CrossRef]
- Men, H.; Gebre, B.; Pochiraju, K.K. Color point cloud registration with 4D ICP algorithm. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Voxelized gicp for fast and accurate 3d point cloud registration. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Lei, H.; Jiang, G.; Quan, L. Fast descriptors and correspondence propagation for robust global point cloud registration. IEEE Trans. Image Process. 2017, 26, 3614–3623. [Google Scholar] [CrossRef] [PubMed]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Gressin, A.; Mallet, C.; Demantké, J.; David, N. Towards 3D LiDAR point cloud registration improvement using optimal neighborhood knowledge. ISPRS J. Photogramm. Remote Sens. 2013, 79, 240–251. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Mei, G.; Zhang, J. Feature-metric registration: A fast semi-supervised approach for robust point cloud registration without correspondences. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Elbaz, G.; Avraham, T.; Fischer, A. 3D point cloud registration for localization using a deep neural network auto-encoder. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Xin, W.; Pu, J. An improved ICP algorithm for point cloud registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Chengdu, China, 17–19 December 2010. [Google Scholar]
- Fu, K.; Liu, S.; Luo, X.; Wang, M. Robust point cloud registration framework based on deep graph matching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Zaganidis, A.; Sun, L.; Duckett, T.; Cielniak, G. Integrating deep semantic segmentation into 3-d point cloud registration. IEEE Robot. Autom. Lett. 2018, 3, 2942–2949. [Google Scholar] [CrossRef] [Green Version]
- Quan, S.; Yang, J. Compatibility-guided sampling consensus for 3-d point cloud registration. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7380–7392. [Google Scholar] [CrossRef]
- Xiao, J.; Adler, B.; Zhang, H. 3D point cloud registration based on planar surfaces. In Proceedings of the 2012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Hamburg, Germany, 13–15 September 2012. [Google Scholar]
- Truong, G.; Gilani, S.Z.; Islam, S.M.S.; Suter, D. Fast point cloud registration using semantic segmentation. In Proceedings of the 2019 Digital Image Computing: Techniques and Applications (DICTA), Canberra, Australia, 10–13 December 2019. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rotation Matrix | Translation Vector | ||||
|---|---|---|---|---|---|
| R | 0.999 | −0.010 | 0.005 | T | 4.644 |
| 0.010 | 0.999 | 0.002 | −4.868 | ||
| −0.005 | −0.002 | 0.999 | 3.819 | ||
| 0 | 0 | 0 | 1.000 | ||
| Rotation Matrix | Translation Vector | ||||
|---|---|---|---|---|---|
| R | 1.010 | −0.010 | 0.007 | T | 119.057 |
| 0.010 | 1.010 | 0.003 | 78.767 | ||
| −0.007 | −0.003 | 1.010 | −3.616 | ||
| 0 | 0 | 0 | 1.000 | ||
| Name of Points | Number of Points | Process Time /s | RSME /m | ||
|---|---|---|---|---|---|
| ICP Method | Proposed Method | ICP Method | Proposed Method | ||
| Group one | 234,644 | 61.526 | 16.951 | 1.619 | 0.511 |
| Group two | 212,977 | 41.235 | 10.962 | 1.596 | 0.447 |
| Marked Points | Target Points | True Distance /m | Measured Distance /m | Error Value /m |
|---|---|---|---|---|
| A | C | 17.224 | 17.252 | 0.028 |
| E | 37.805 | 37.844 | 0.039 | |
| B | D | 18.462 | 18.456 | 0.006 |
| E | 30.868 | 30.835 | 0.033 | |
| C | A | 17.224 | 17.270 | 0.046 |
| E | 20.725 | 20.698 | 0.027 | |
| D | A | 38.225 | 38.252 | 0.027 |
| B | 18.462 | 18.432 | 0.030 | |
| E | A | 37.805 | 37.839 | 0.034 |
| C | 20.725 | 20.701 | 0.024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Zhao, C.; Zhang, H. Composite Ski-Resort Registration Method Based on Laser Point Cloud Information. Machines 2022, 10, 405. https://doi.org/10.3390/machines10050405
Wang W, Zhao C, Zhang H. Composite Ski-Resort Registration Method Based on Laser Point Cloud Information. Machines. 2022; 10(5):405. https://doi.org/10.3390/machines10050405
Chicago/Turabian StyleWang, Wenxin, Changming Zhao, and Haiyang Zhang. 2022. "Composite Ski-Resort Registration Method Based on Laser Point Cloud Information" Machines 10, no. 5: 405. https://doi.org/10.3390/machines10050405
APA StyleWang, W., Zhao, C., & Zhang, H. (2022). Composite Ski-Resort Registration Method Based on Laser Point Cloud Information. Machines, 10(5), 405. https://doi.org/10.3390/machines10050405