
Optimization and Realization of the Coordination Control Strategy for Extended Range Electric Vehicle



Abstract
:1. Introduction
2. Methodology
2.1. Fuzzy Adaptive PID Controller
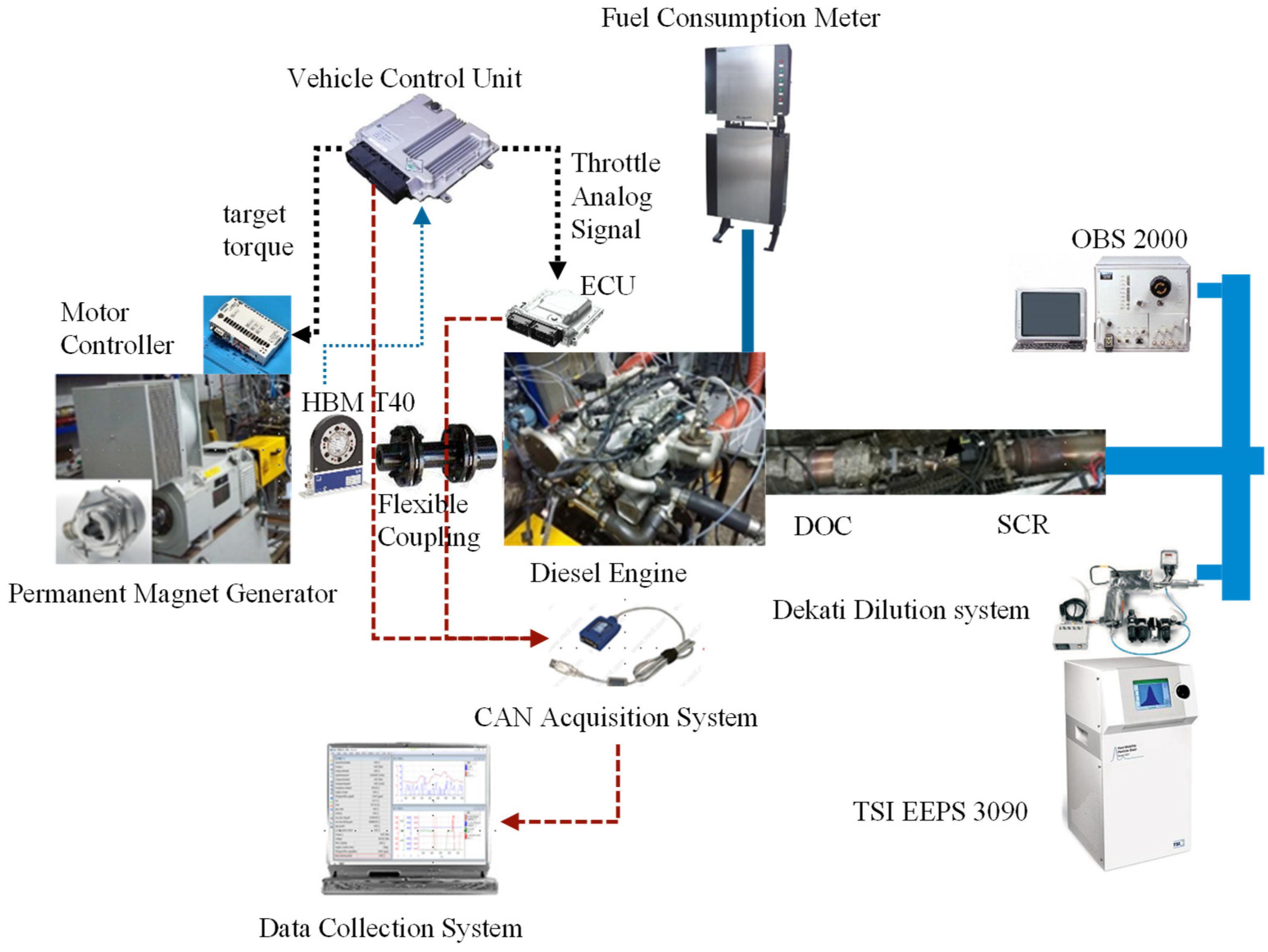
2.2. Bench Test System
3. Results and Discussion
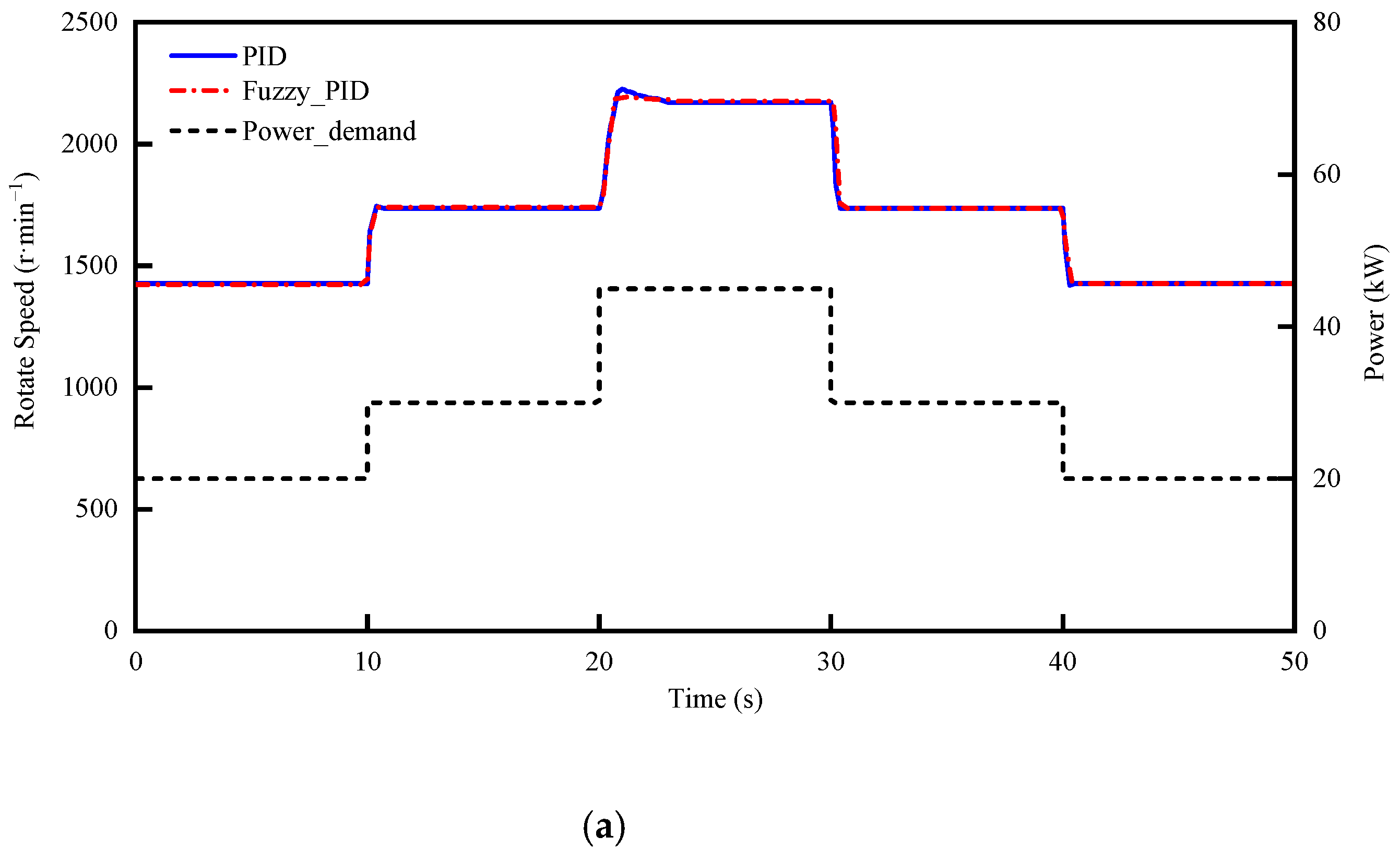
3.1. Simulation Results of Working Condition Switching
3.2. Test Results of the Fuzzy PID Control Optimization
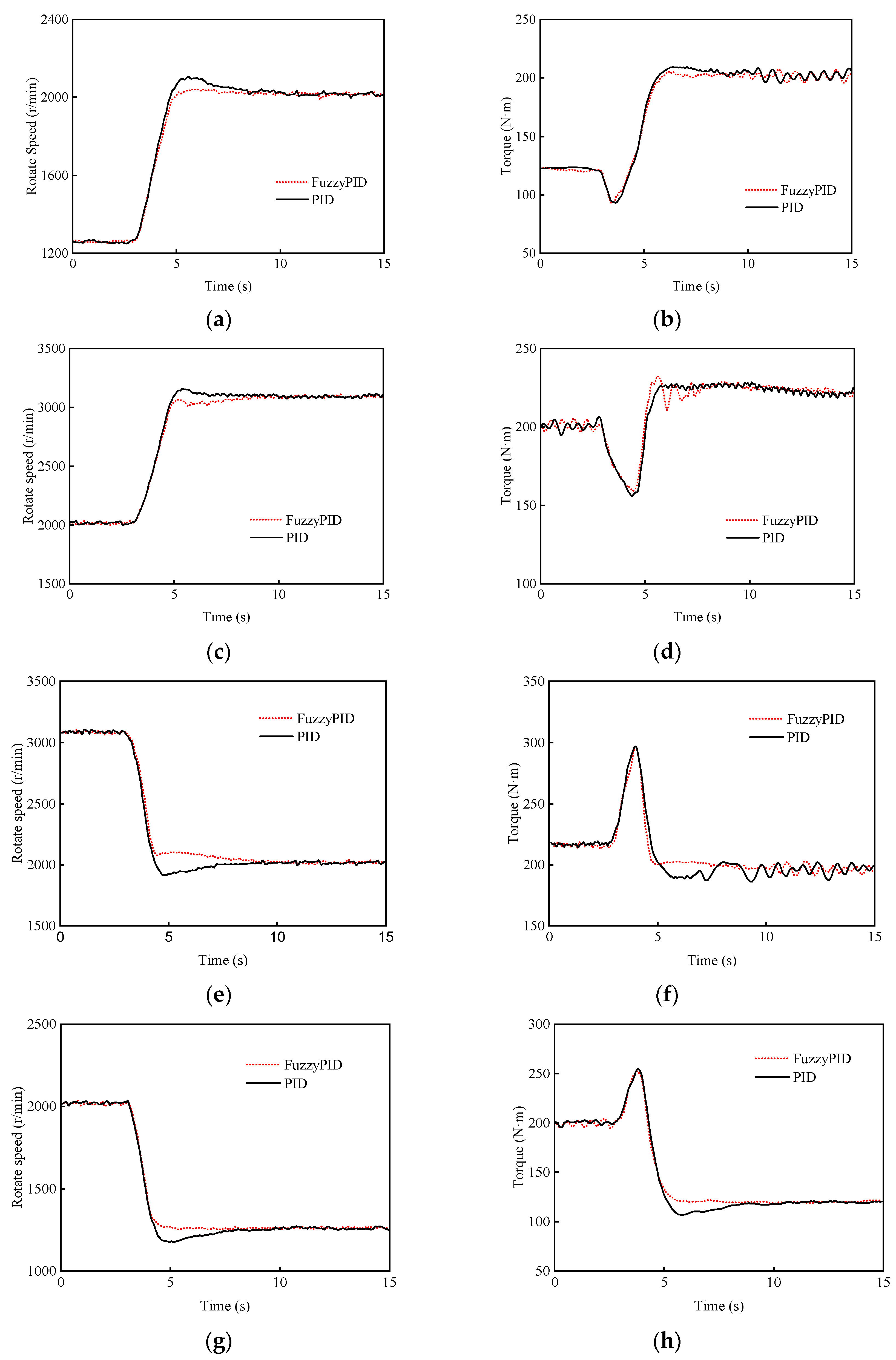
3.2.1. Speed/Torque Characteristics
3.2.2. Fuel Consumption Characteristics
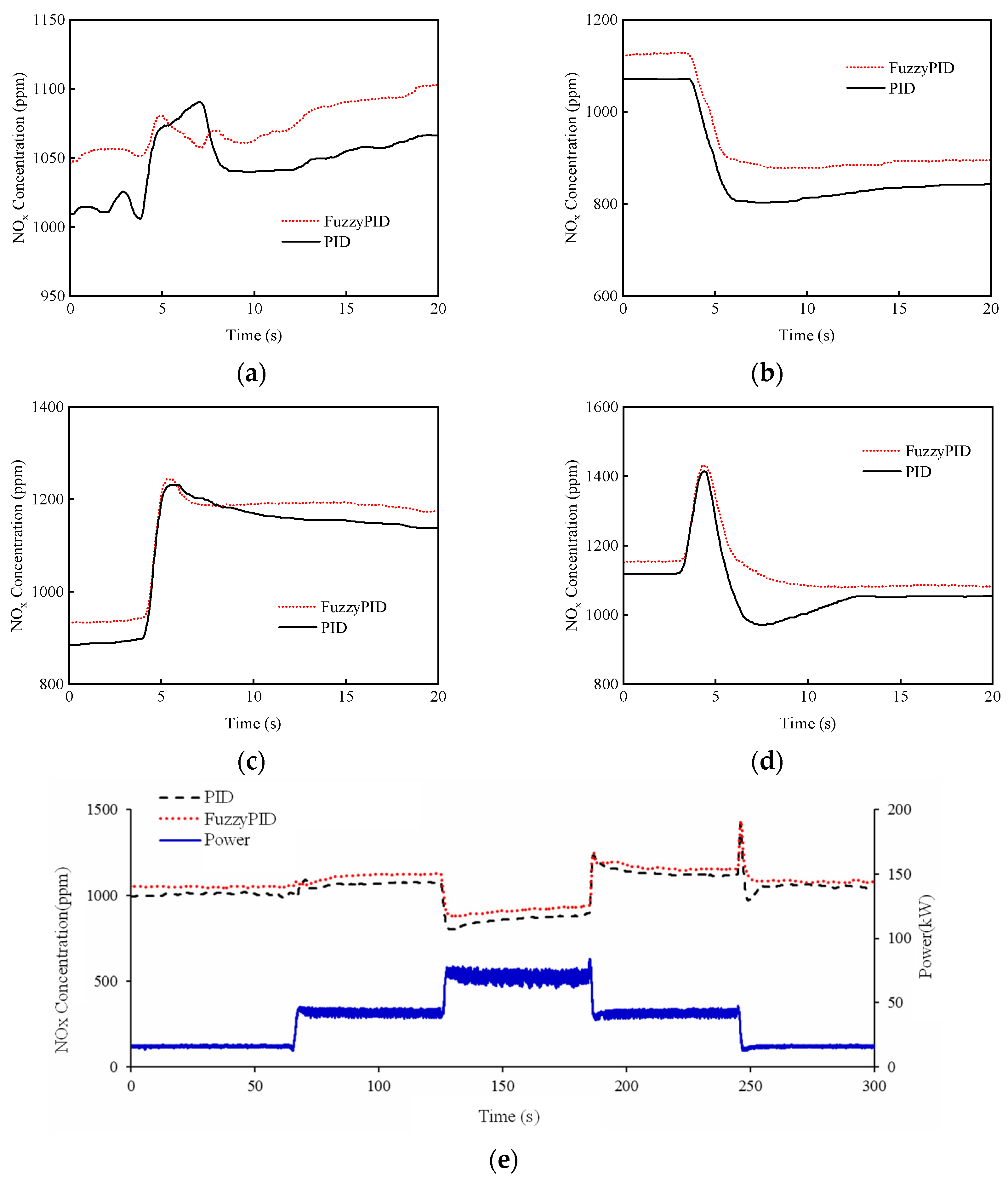
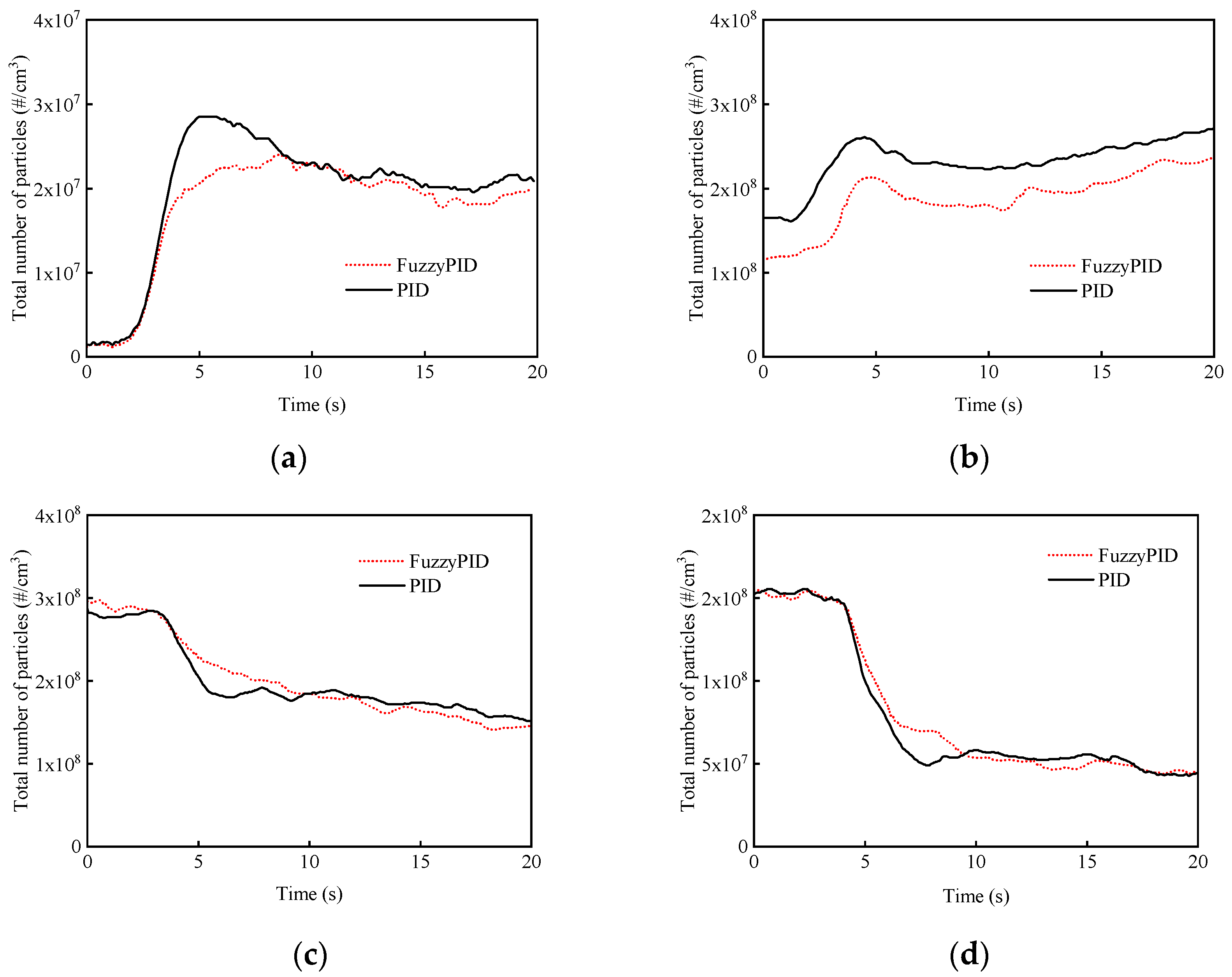
3.2.3. Emission Characteristics
4. Conclusions
- (1)
- Based on the fuzzy adaptive PID control strategy, the power performance, fuel consumption and exhaust emissions of the extended range electric vehicle were greatly improved.
- (2)
- The simulation results show that, compared with the traditional PID control, the fuzzy adaptive PID control significantly reduced the speed overshoot in the process of condition switching, and the control performance optimization effect was obvious. Additionally, the experimental results verify the optimization of the fuzzy adaptive PID control. Compared with the traditional PID control, the fuzzy PID control significantly reduced the fluctuation in the speed and torque. Especially in the process of speed and torque reduction, in switching 3 and switching 4, the overshoot rate of the fuzzy PID control speed was 2.8% and 0.7%, respectively, while the overshoot rate of the torque was less than 0.8%, which was significantly smaller than the traditional PID control.
- (3)
- Comparing the fuel consumption between the two control methods, the fuel consumption of the fuzzy PID control was lower, especially in the process of increasing the speed and torque, where the fuel consumption of the fuzzy adaptive PID control was 2.1% and 0.5% lower than that of the traditional PID control, respectively, and the fuzzy PID control achieved a stabler switching process.
- (4)
- Comparing the emission characteristics between the two control methods, the NOx emissions based on the fuzzy PID control were higher than those of the traditional PID control; the emission of particles of the fuzzy PID control was less than that of the traditional PID control, especially during the process of increasing the speed and torque, where the number of particles of the fuzzy PID control was 11% and 19% less than that of the traditional PID control, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- International Energy Agency (IEA). CO2 Emissions from Fuel Combustion 2018 Highlights; International Energy Agency: Paris, France, 2018. [Google Scholar]
- Harrison, G.; Thiel, C. An exploratory policy analysis of electric vehicle sales competition and sensitivity to infrastructure in Europe. Technol. Forecast. Soc. Chang. 2017, 114, 165–178. [Google Scholar] [CrossRef]
- Pi, J.M.; Bak, Y.S.; You, Y.K.; Park, D.K.; Kim, H.S. Development of route information based driving control algorithm for a range-extended electric vehicle. Int. J. Automot. Technol. 2016, 17, 1101–1111. [Google Scholar] [CrossRef]
- Aharon, I.; Kuperman, A. Topological overview of powertrains for battery-powered vehicles with range extenders. IEEE Trans. Power Electron. 2011, 26, 868–876. [Google Scholar] [CrossRef]
- Tate, E.D.; Harpster, M.O.; Savagian, P.J. The electrification of the automobile: From conventional hybrid, to plug-in hybrids, to extended-range electric vehicles. SAE Int. J. Passeng. Cars-Electron. Electr. Syst. 2009, 1, 156–166. [Google Scholar] [CrossRef] [Green Version]
- Ren, G.Z.; Shan, S.; Ma, G.Q.; Shang, X.B.; Zhu, S.L.; Zhang, Q.Y.; Yang, T.Q. Review of energy storage technologies for extended range electric vehicle. J. Appl. Sci. Eng. 2014, 22, 69–82. [Google Scholar]
- Ahmada, S.; Bathaee, S.M.T.; Hosseinpour, A.H. Improving fuel economy and performance of a fuel-cell hybrid electric vehicle (fuel-cell, battery, and ultra-capacitor) using optimized energy management strategy. Energy Convers. Manag. 2018, 160, 74–84. [Google Scholar] [CrossRef]
- Qu, X.D.; Wang, Q.N.; Yu, Y.B. A Study on the control strategy for APU in a extended-range EV. Automot. Eng. 2013, 35, 763–768. [Google Scholar]
- Hou, J.; Yao, D.W.; Wu, F.; Lü, C.L.; Wang, H.; Shen, J.H. Control strategy for electric vehicle range-extender based on hybrid excitation generator. J. Shanghai Jiao Tong Univ. 2021, 55, 206–212. [Google Scholar]
- Zha, Y.F.; Song, J.L.; Zhang, Q.Y.; Liu, G.Q.; Guo, R.H. Optimisation of control strategy of a range-extended electric bus. Int. J. Electr. Hybrid Vehicles 2019, 11, 1–11. [Google Scholar] [CrossRef]
- Yin, C.L.; Zhang, Y.X.; Zhang, J.W. PID control of engine speed tuning for hybrid electric vehicle. J. Shanghai Jiao Tong Univ. 2004, 11, 1913–1916. [Google Scholar]
- Zhang, J.Y.; Jiao, X.H. Adaptive coordinated control of engine speed and battery charging voltage. J. Control Theory Appl. 2008, 6, 69–73. [Google Scholar] [CrossRef]
- Fiengo, G.; Glielmo, L.; Vasca, F. Control of auxiliary power unit for hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2017, 15, 1122–1130. [Google Scholar] [CrossRef]
- Zhang, H.; Fu, L.; Song, J.J.; Yang, Q.Q. Power energy management and control strategy study for extended-range auxiliary power uni. Energy Procedia 2016, 104, 32–37. [Google Scholar] [CrossRef]
- Li, M.L.; Ding, W.Q.; Zeng, X.Y.; Zhong, Z.M.; Hu, Z.J.; Yuan, D.K.; Li, L.G. Optimization of speed fluctuation of internal combustion engine range extender by a dual closed-loop control strategy. SAE Tech. Pap. 2021, 1, 0782. [Google Scholar]
- Xiong, W.Y.; Ye, J.; Gong, Q.; Feng, H.; Xu, J.B.; Shen, A.W. A range-extender engine speed control strategy with generator torque as an auxiliary input. Control Eng. Pract. 2020, 103, 104596. [Google Scholar] [CrossRef]
- Li, J.Q.; Wang, Y.H.; Chen, J.W. Research of APU dynamic characteristics modeling and coordination control in electric vehicles. Energy Procedia 2016, 88, 921–927. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.S.; Wang, X.L.; Huang, X.E.; Gan, P.; Cheng, W. Modeling and simulation of the auxiliary power system in extended range electric vehicle. Appl. Mech. Mater. 2013, 397–400, 1858–1862. [Google Scholar] [CrossRef]
- Liu, H.W.; Lei, Y.L.; Fu, Y.; Li, X.Z. Optimization and realization on the coordination control strategy for auxiliary power unit of range-extended electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, Q.Q.; Song, J.J.; Fu, L. Study and realization on power energy distribution control for auxiliary power unit. Energy Procedia 2017, 105, 2601–2606. [Google Scholar] [CrossRef]
- Mizumoto, M. Min-max-gravity method versus product-sum-gravity method for fuzzy control. In Proceedings of the IV IFSA Congress (Part E); IEEE: Brussels, Belgium, 1991; pp. 127–130. [Google Scholar]
- Xu, J.X.; Hang, C.C.; Liu, C. Parallel structure and tuning of a fuzzy PID controller. Automatica 2000, 36, 673–684. [Google Scholar] [CrossRef]
- Kocaarslan, I.; Cam, E. Experimental modeling and simulation with adaptive control of a power plant. Energy Convers. Manag. 2007, 48, 787–796. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Greg, M.; Mike, M.D.; Mark, B.S. Towards an understanding of adaptive cruise control. Transport. Res. 2001, 9, 3–51. [Google Scholar]
- Higashimata, A.; Adachi, K.; Hashizume, T.; Tange, S. Design of a headway distance control system for ACC. JSAE Rev. 2001, 22, 15–22. [Google Scholar] [CrossRef]
- Mayr, R. Robust performance for autonomous intelligent cruise control systems. In Proceedings of the Conference on Decision and Control, Tampa, FL, USA, 16 December 1998; pp. 487–492. [Google Scholar]
- Mizumoto, M. Realization of PID controls by fuzzy control methods. Fuzzy Sets Syst. 1995, 70, 171–182. [Google Scholar] [CrossRef]
- Huang, Y.; Yasunobu, S. A General Practical Design Method for Fuzzy PID Control from Conventional PID Control. In Proceedings of the IEEE International Conference on Fuzzy Systems, Honolulu, HI, USA, 12–17 May 2002; pp. 969–972. [Google Scholar]
- Zhao, Z.Y.; Tomizuka, M.; Isaka, S. Fuzzy gain scheduling of PID controllers. IEEE Trans. Syst. Man Cybern. 1993, 23, 1392–1398. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.Q.; Masaharu, M. PID type fuzzy controller and parameters adaptive method. Fuzzy Sets Syst. 1996, 78, 23–35. [Google Scholar]
- Jiang, J.Y.; Ke, T. Design and Simulation of fuzzy PID controller based on Simulink. In Proceedings of the 3rd International Conference on Mechanical Engineering and Intelligent Systems (ICMEIS 2015), Yinchuan, China, 15–16 August 2015. [Google Scholar]
- Kazemian, H.B. Comparative study of a learning fuzzy PID controller and a self-tuning controller. ISA Trans. 2001, 40, 245–253. [Google Scholar] [CrossRef]
- Gyöngy, I.J.; Clarke, D.W. The automatic tuning and adaptation of PID controllers. Control Eng. Pract. 2005, 14, 149–163. [Google Scholar] [CrossRef]
- Mohan, B.M.; Sinha, A. The simplest fuzzy PID controllers: Mathematical models and stability analysis. Soft Comput. 2006, 10, 961–975. [Google Scholar] [CrossRef]
- Woo, Z.W.; Chung, H.Y.; Lin, J.J. A PID type fuzzy controller with self-tuning scaling factors. Fuzzy Sets Syst. 2000, 115, 321–326. [Google Scholar] [CrossRef]
- KO, J.; Jin, D.; Jang, W.; Myung, C.L.; Kwon, S.; Park, S. Comparative investigation of NOx emission characteristics from a Euro 6-compliant diesel passenger car over the NEDC and WLTC at various ambient temperatures. Appl. Energy. 2017, 187, 652–662. [Google Scholar] [CrossRef]
- Lou, D.M.; Sun, Y.Z.; Yu, H.Y.; Tan, P.Q.; Hu, Z.Y. Performance evaluation method and experiment for diesel engine under idle transient operation condition based on smoke emission limit. Trans. Chin. Soc. Agric. Eng. 2017, 33, 111–116. [Google Scholar]
- Shen, Y.P.; He, Z.D.; Liu, D.Q.; Xu, B.J. Optimization of fuel consumption and emissions of auxiliary power unit based on multi-objective optimization model. Energies 2016, 9, 90. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NM | NS | ZO | PS | PM | PB | ||
|---|---|---|---|---|---|---|---|---|
| NB | PB | PB | PB | PB | PB | PB | PB | |
| NM | PB | PM | PM | PM | PM | PM | PB | |
| NS | PS | PM | PM | PS | PM | PM | PS | |
| ZO | ZO | ZO | ZO | ZO | ZO | ZO | ZO | |
| PS | PS | PM | PM | PS | PM | PM | PS | |
| PM | PB | PM | PM | PM | PM | PM | PB | |
| PB | PB | PB | PB | PB | PB | PB | PB | |
| NB | NB | NB | NM | NB | NM | NB | NB | |
| NM | NB | NB | NM | NM | NM | NB | NB | |
| NS | PS | PS | PS | PS | PS | PS | PS | |
| ZO | PB | PB | PB | PB | PB | PB | PB | |
| PS | PS | PS | PS | PS | PS | PS | PS | |
| PM | NB | NB | NM | NB | NM | NB | NB | |
| PB | NB | NB | NM | NM | NM | NB | NB | |
| Project | Parameter |
|---|---|
| Number of cylinders | 4 |
| Engine displacement (L) | 1.85 |
| Cylinder diameter × stroke (mm) | 80 × 92 |
| Compression ratio | 18.5 |
| Calibration power/speed (kW)/(r/min) | 70/3000 |
| Maximum torque/speed (N·m)/(r/min) | 244/2400 |
| Emission | China V vehicle emission standard |
| Test Equipment | Model | Accuracy |
|---|---|---|
| Particle size analyzer | TSI EEPS-3090 | - |
| Conventional gas analyzer | HORIBA OBS-2200 | ±0.3% |
| Dilution system | Dekati DI-2000 | - |
| Fuel consumption meter | ToCeil-CMF | <0.1% |
| Working Condition | Initial Speed (r·min−1) and Torque (N·m) | End Speed (r·min−1) and Torque (N·m) |
|---|---|---|
| Switching 1 | Minimum power point 1263/122 | Minimum fuel consumption power point 2000/200 |
| Switching 2 | Minimum fuel consumption power point 2000/200 | Maximum power point 3090/215 |
| Switching 3 | Maximum power point 3090/215 | Minimum fuel consumption power point 2000/200 |
| Switching 4 | Minimum fuel consumption power point 2000/200 | Minimum power point 1263/122 |
| Items | Operating Mode Switching | Parameters | PID | The Fuzzy PID |
|---|---|---|---|---|
| speed | Switching 1 | Overshoot | 85 | 24 |
| Overshoot rate (%) | 4.2 | 1.2 | ||
| Switching 2 | Overshoot | 66 | −7 | |
| Overshoot rate (%) | 2.1 | 0.2 | ||
| Switching 3 | Overshoot | −107 | 56 | |
| Overshoot rate (%) | 5.3 | 2.8 | ||
| Switching 4 | Overshoot | −83 | −9 | |
| Overshoot rate (%) | 6.6 | 0.7 | ||
| torque | Switching 1 | Overshoot | 7.7 | 3.4 |
| Overshoot rate (%) | 3.8 | 1.7 | ||
| Switching 2 | Overshoot | 8.8 | 7.9 | |
| Overshoot rate (%) | 4.1 | 3.6 | ||
| Switching 3 | Overshoot | −11 | 0.9 | |
| Overshoot rate (%) | 5.5 | 0.45 | ||
| Switching 4 | Overshoot | −13.5 | −0.9 | |
| Overshoot rate (%) | 11.1 | 0.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Lou, D.; Zhang, Y.; Fang, L. Optimization and Realization of the Coordination Control Strategy for Extended Range Electric Vehicle. Machines 2022, 10, 297. https://doi.org/10.3390/machines10050297
Zhao K, Lou D, Zhang Y, Fang L. Optimization and Realization of the Coordination Control Strategy for Extended Range Electric Vehicle. Machines. 2022; 10(5):297. https://doi.org/10.3390/machines10050297
Chicago/Turabian StyleZhao, Keqin, Diming Lou, Yunhua Zhang, and Liang Fang. 2022. "Optimization and Realization of the Coordination Control Strategy for Extended Range Electric Vehicle" Machines 10, no. 5: 297. https://doi.org/10.3390/machines10050297
APA StyleZhao, K., Lou, D., Zhang, Y., & Fang, L. (2022). Optimization and Realization of the Coordination Control Strategy for Extended Range Electric Vehicle. Machines, 10(5), 297. https://doi.org/10.3390/machines10050297