
A New Framework for the Harmonic Balance Method in OpenFOAM



Abstract
:1. Introduction
2. Implicit Density-Based Solver Implementation
2.1. Governing Equations
2.2. Numerical Discretization
2.3. Code Validation
3. Baseline Harmonic Balance Method
3.1. Mathematical Formulation
3.2. Numerical Solution
3.3. Numerical Application: NASA Rotor 37
| Algorithm 1 Baseline HBM solution algorithm. |
|
4. Multi-Frequencial Harmonic Balance Method
4.1. Mathematical Formulation and Numerical Implementation
- The frequency set is composed of frequencies that, in general, are no longer harmonics of a common base frequency. Please notice that, in spite of this, the following relation between the minimum necessary number of samples/snapshots () and the number of frequencies still holds:
- Now the matrix is no longer skew-symmetric. Therefore, the components on its diagonal are not zero and step 18 of Algorithm 1 must be modified according to:
| Algorithm 2 OptTP algorithm for the minimisation of the Fourier matrix condition number. As per Nimmagadda et al. [17]. |
|
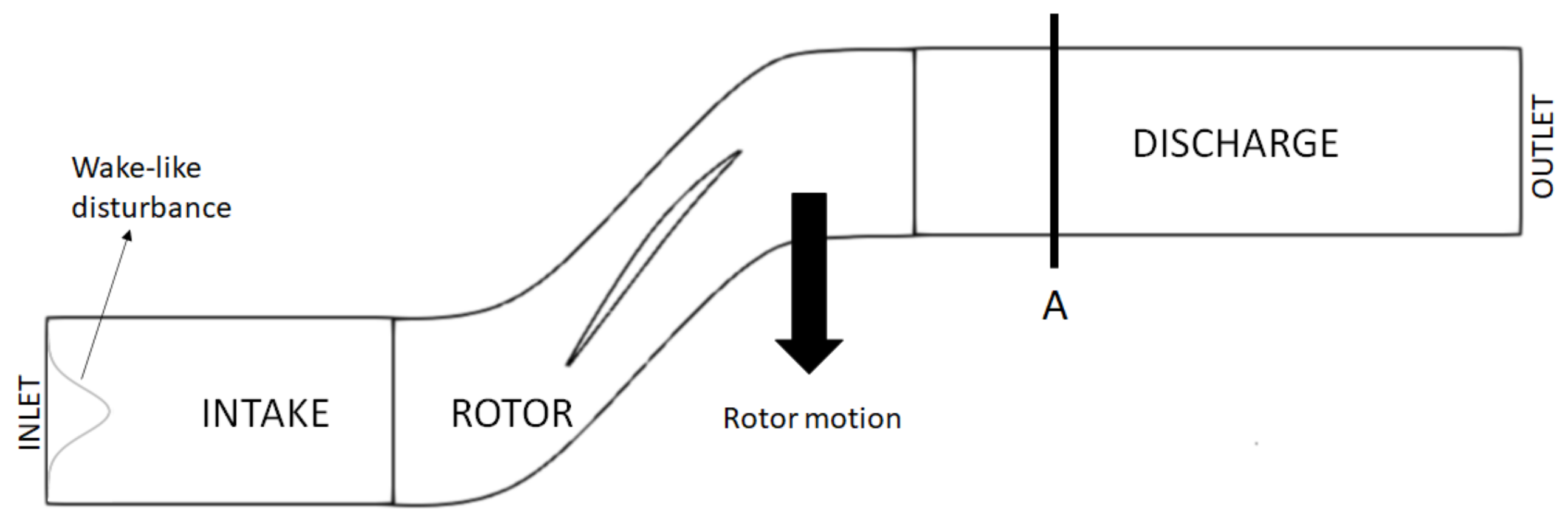
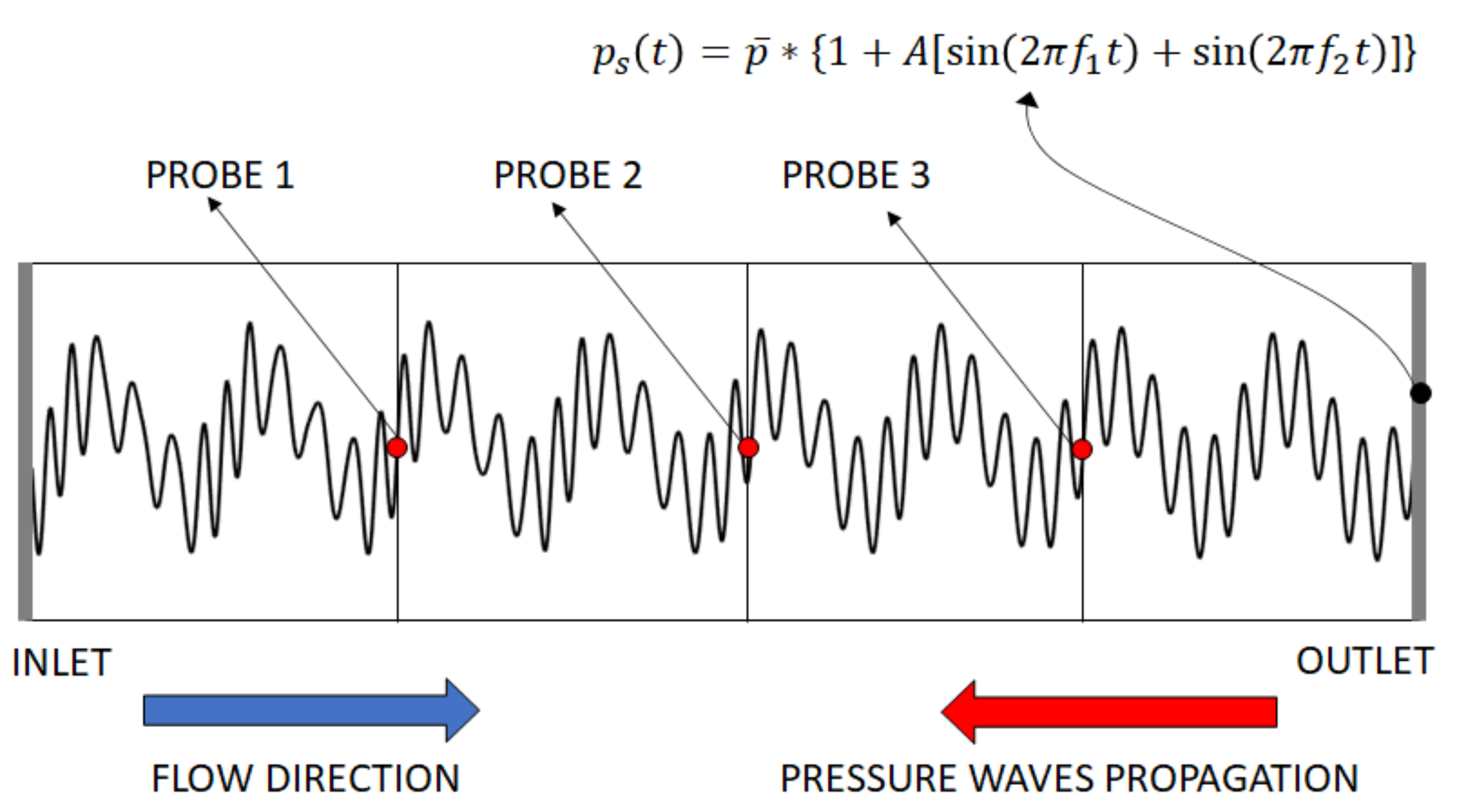
4.2. Numerical Application: Channel Flow
4.3. Coupling between Different Zones
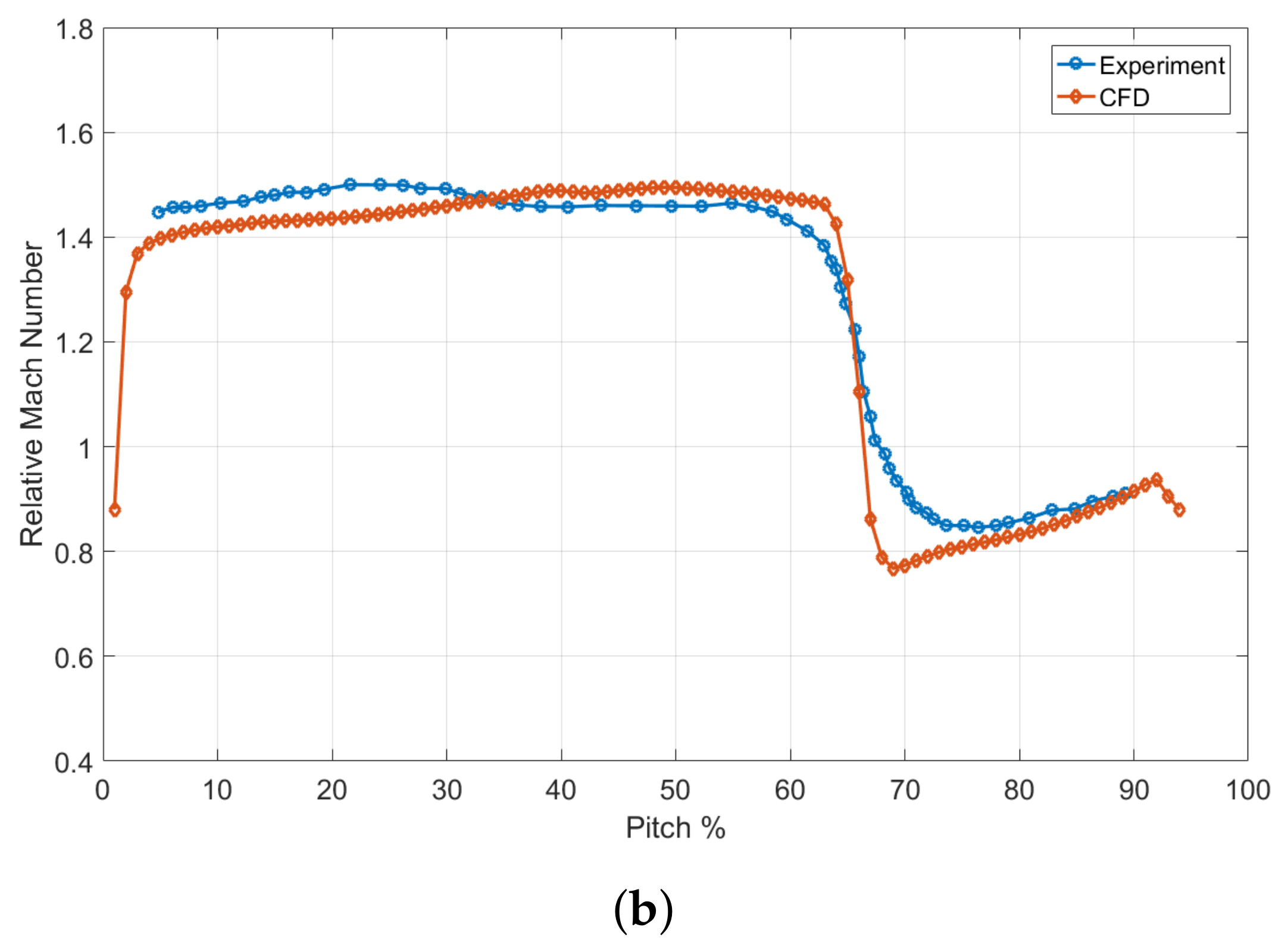
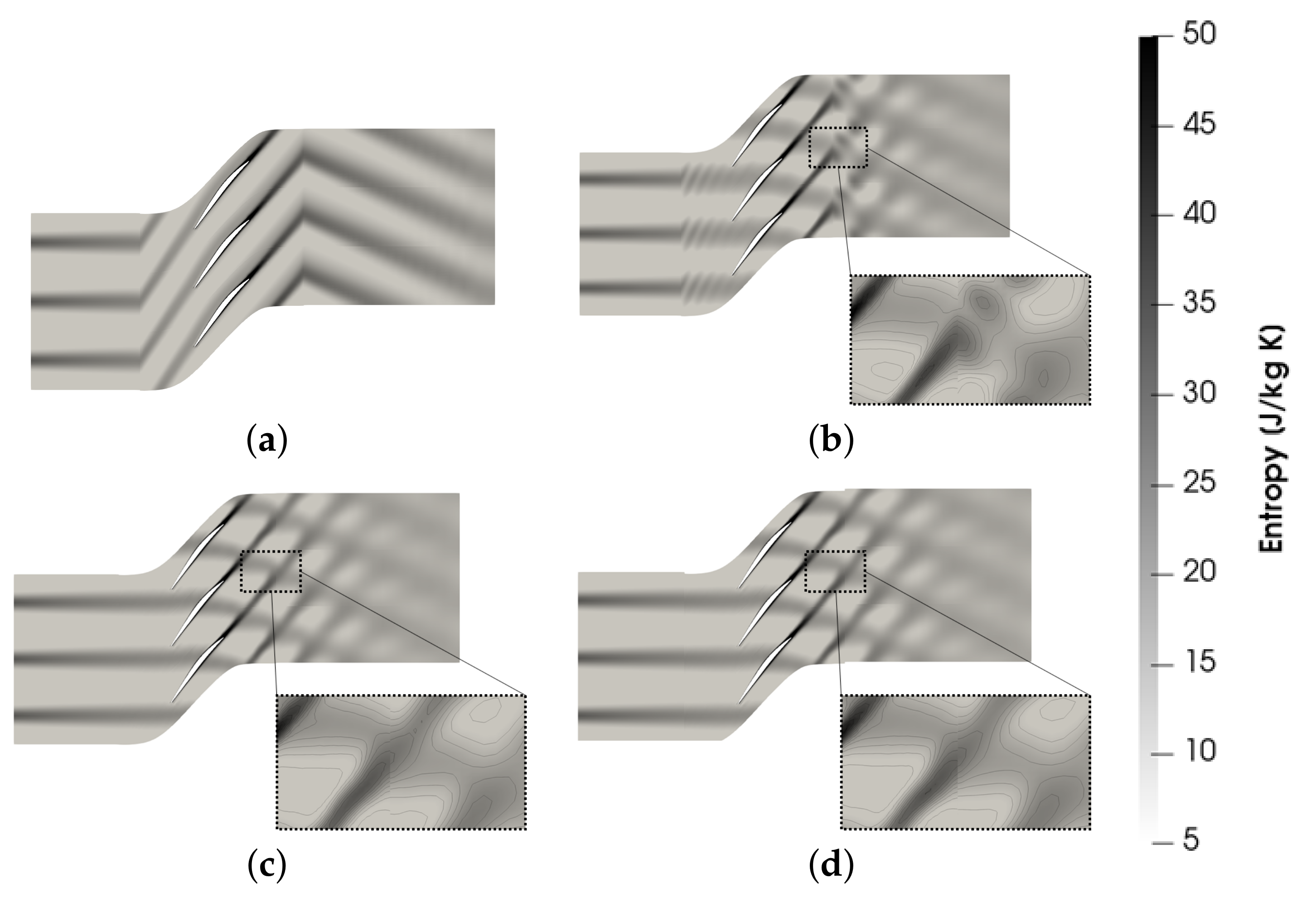
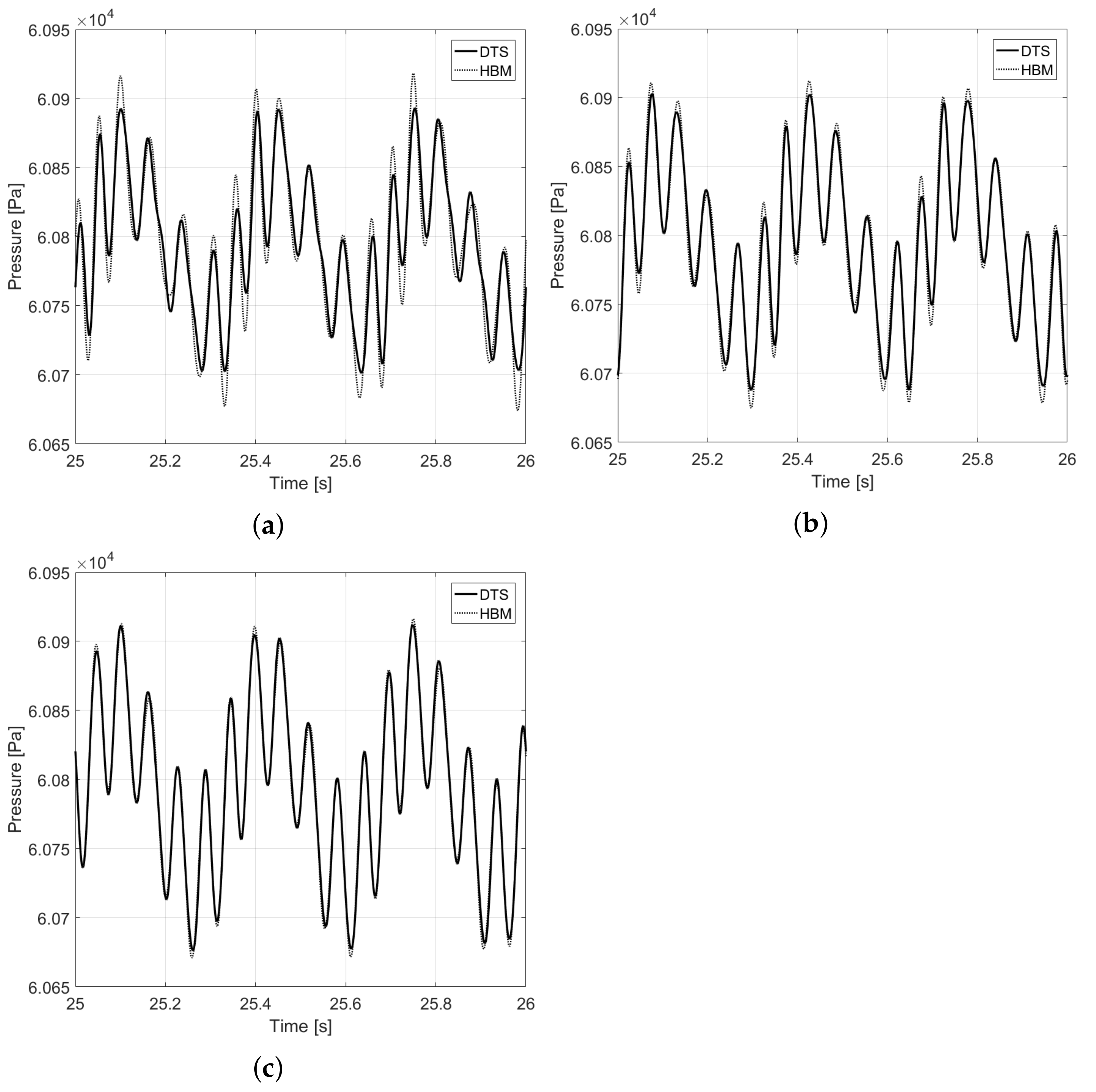
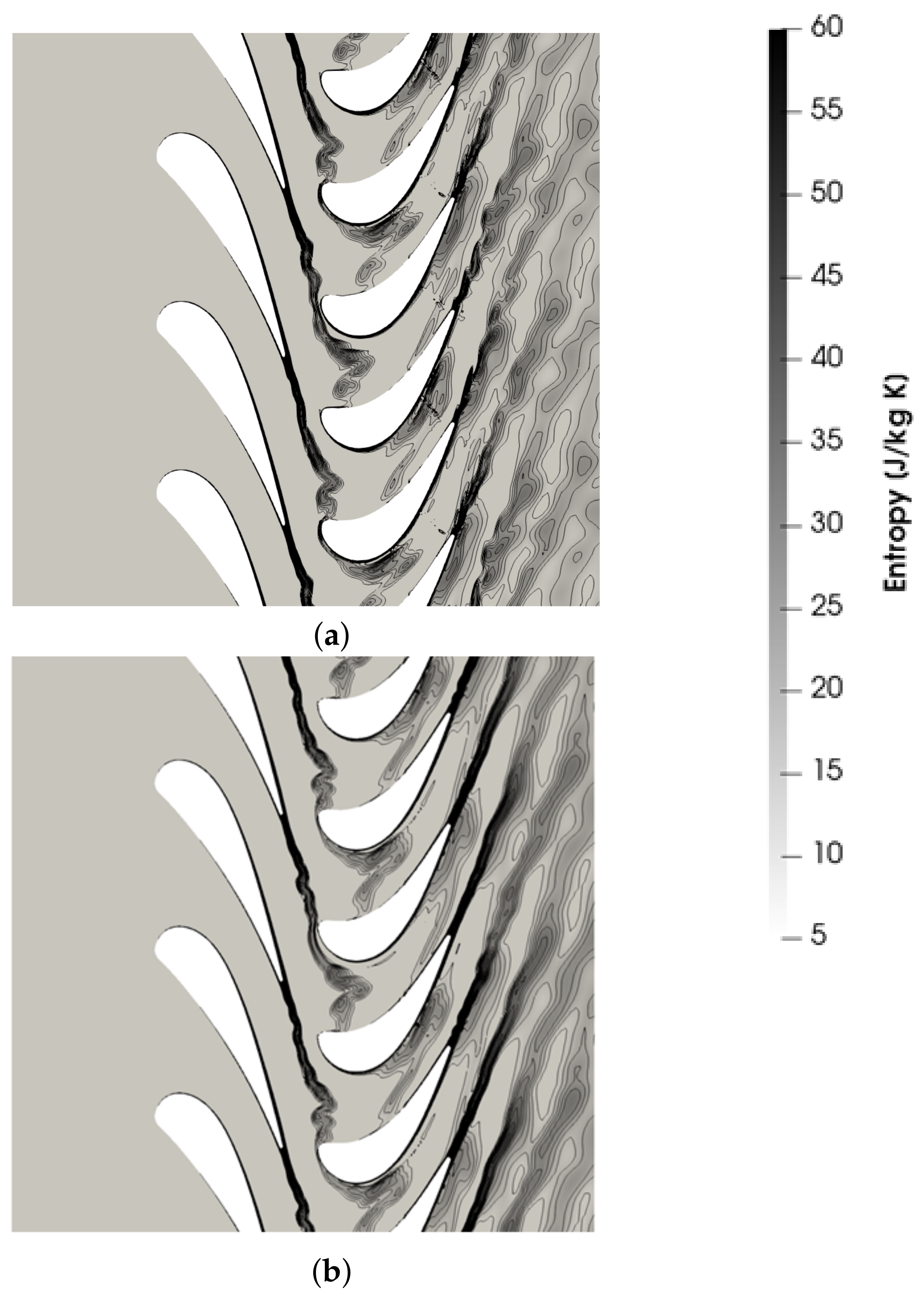
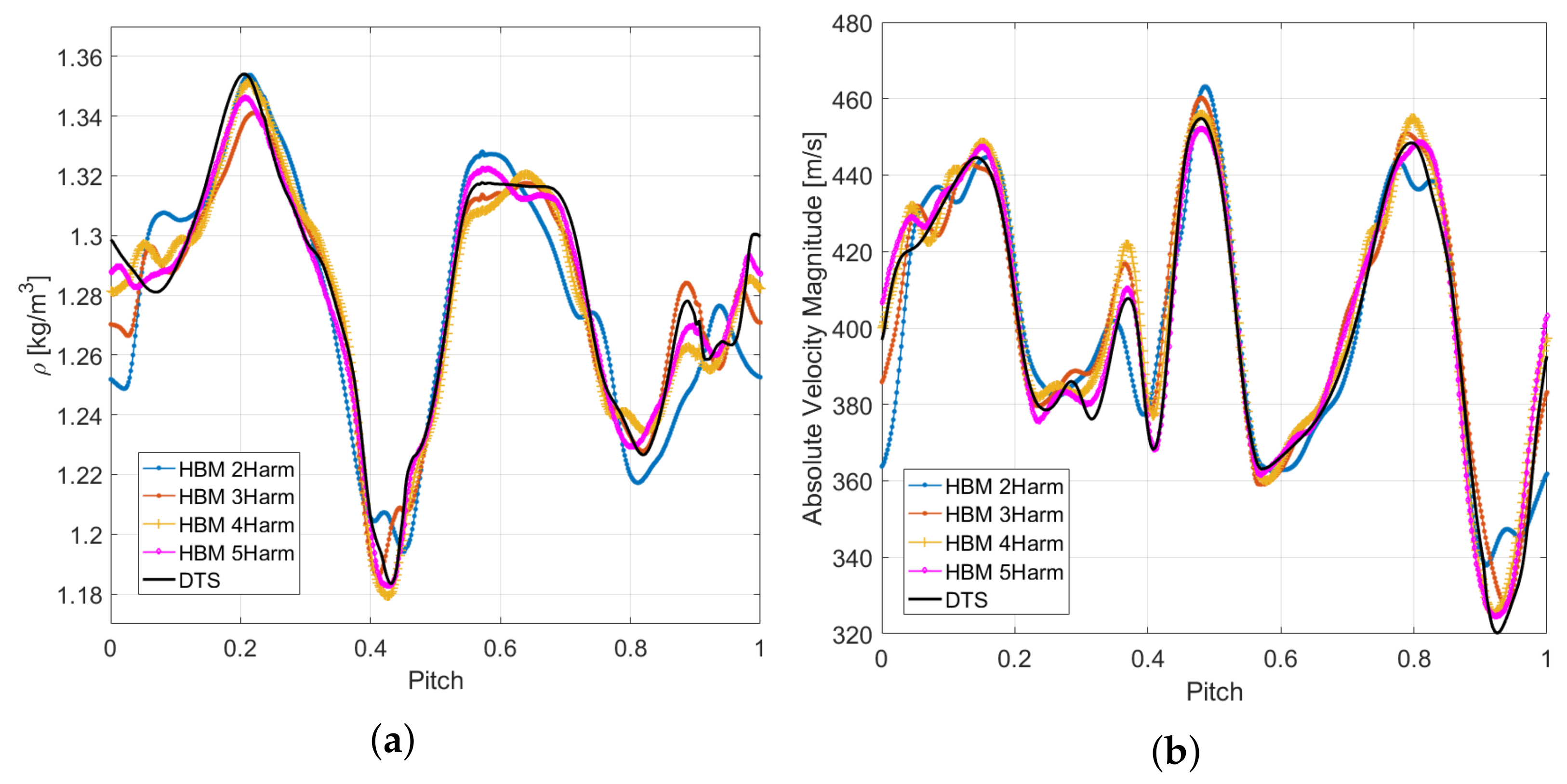
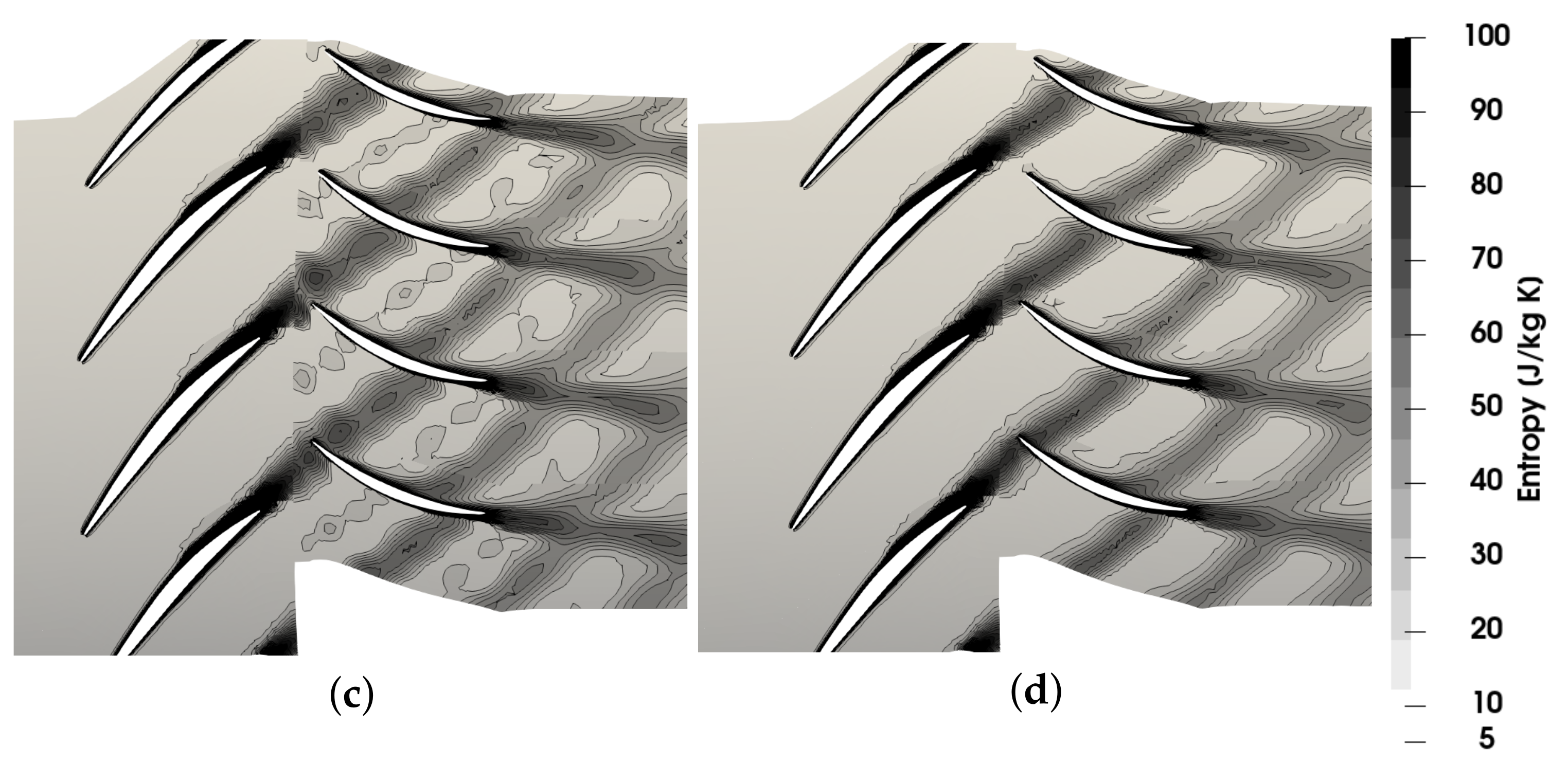
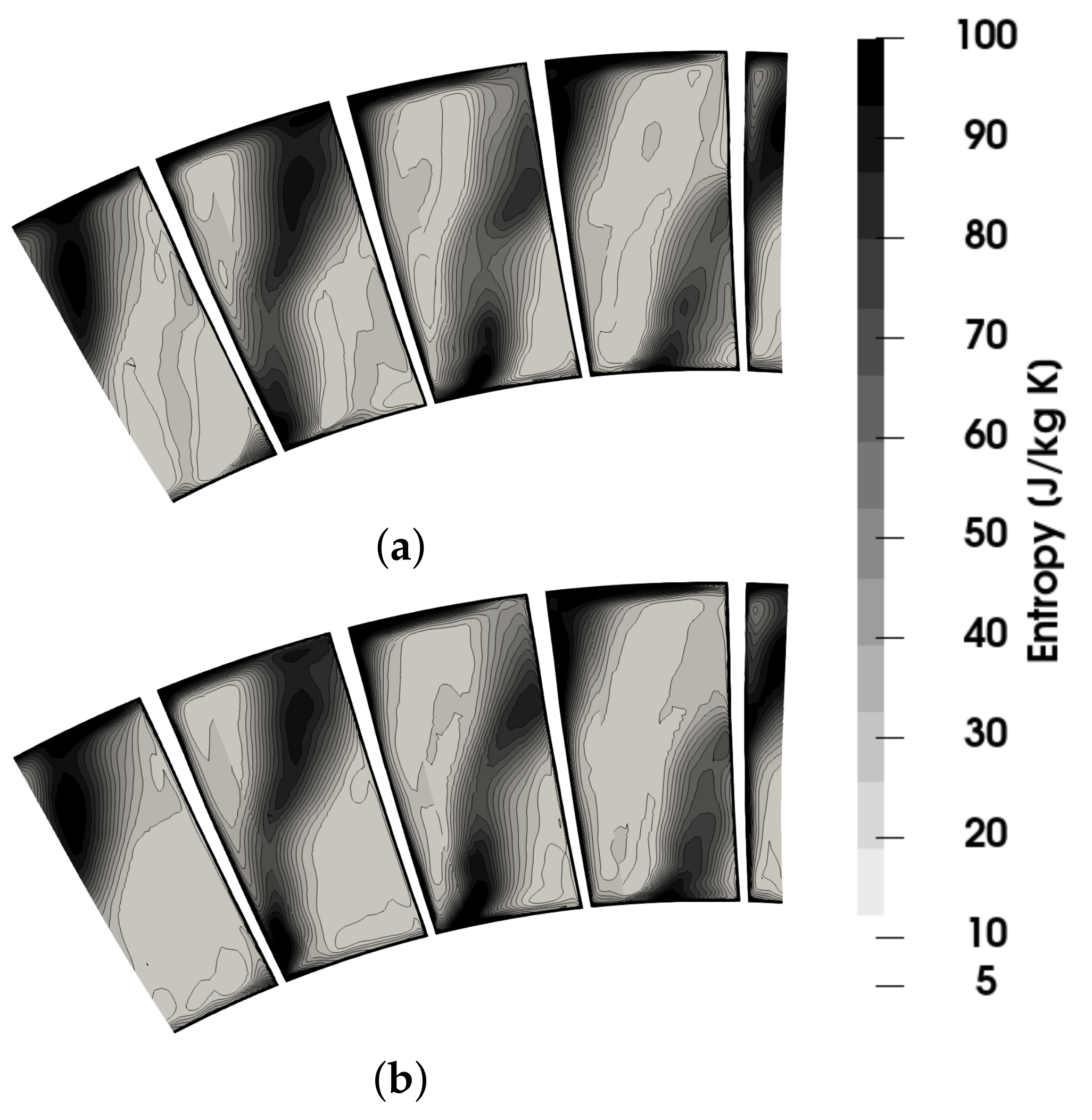
4.4. Numerical Application: Axial Turbine Stage
5. Other Relevant Issues for Turbomachinery Applications
5.1. Three-Dimensional Simulations in Cartesian Coordinates
- (1)
- Transform the momentum vector in cylindrical coordinates.
- (2)
- Apply the HB operator to the momentum vector to find the time derivative approximation in cylindrical coordinates (second term on the rhs of Equation (29)).
- (3)
- Transform the just derived source term back to cartesian coordinates.
- (4)
- Add the “steady” source term as in Equation (29). This can be easily included exploiting the MRF support of the solver.
- (5)
- Compute the source term for the continuity and energy equation as usual, since for scalar quantities no changes are needed.
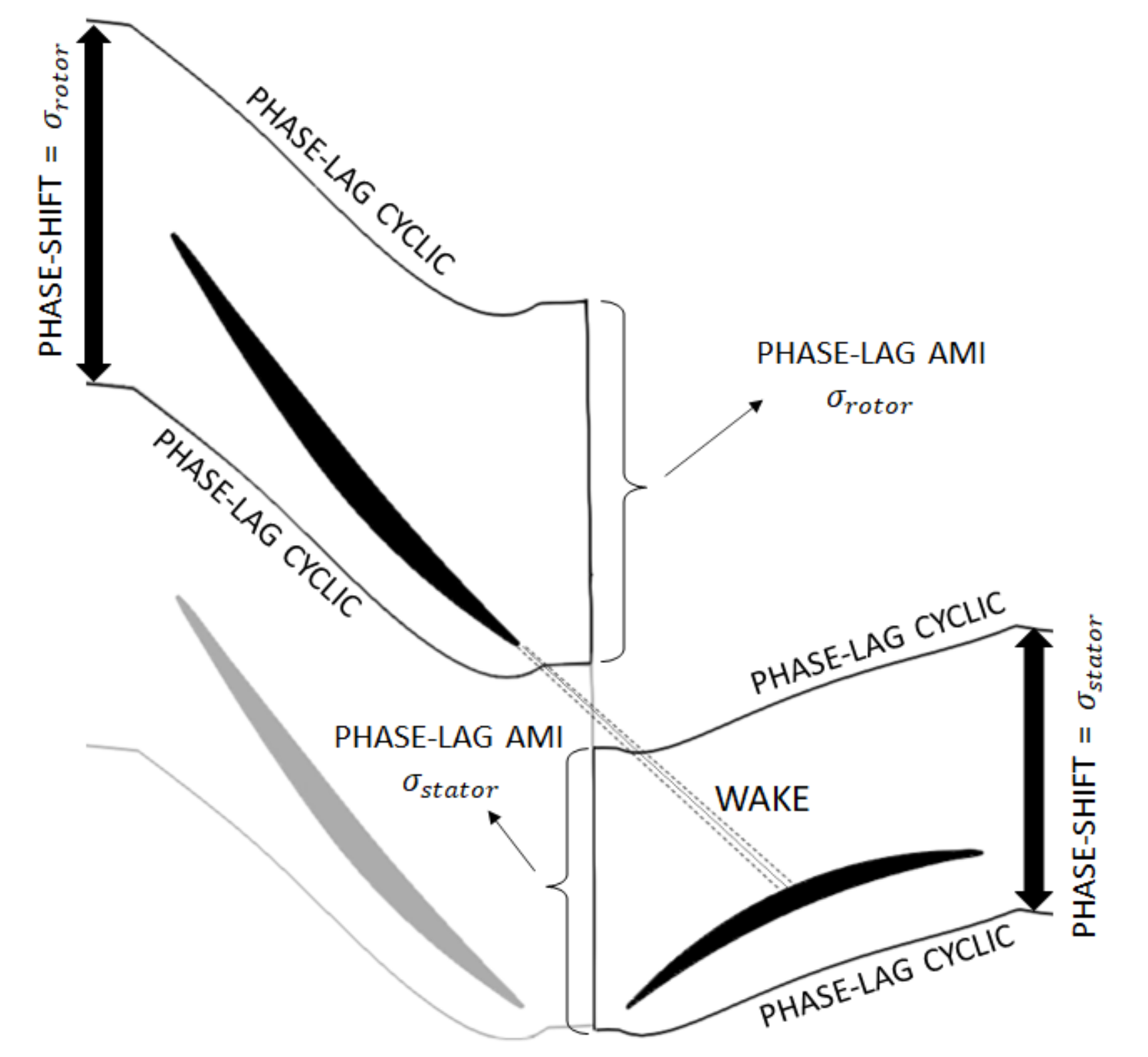
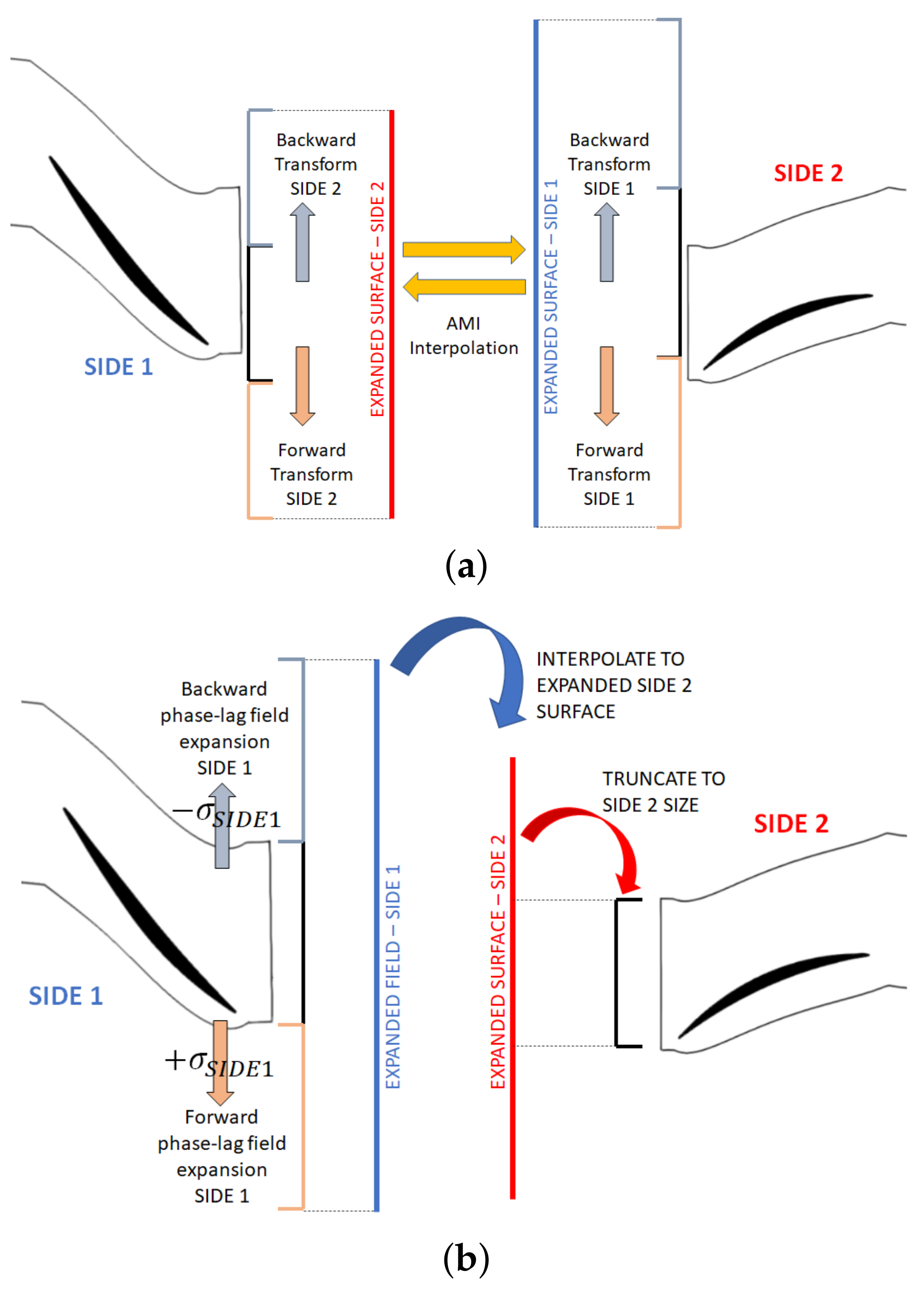
5.2. Single-Passage Reduction
| Algorithm 3 Phase-lag AMI algorithm. |
|
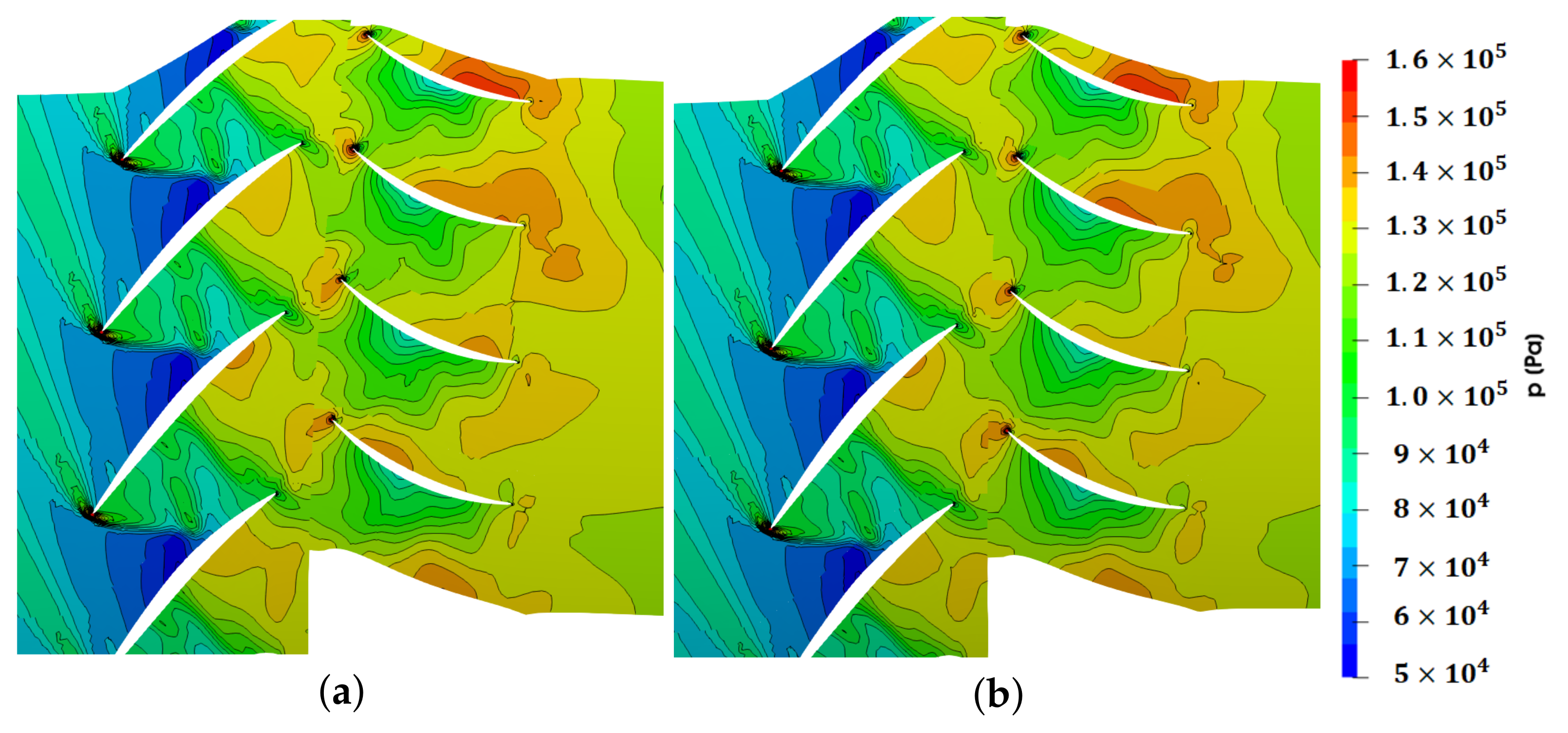
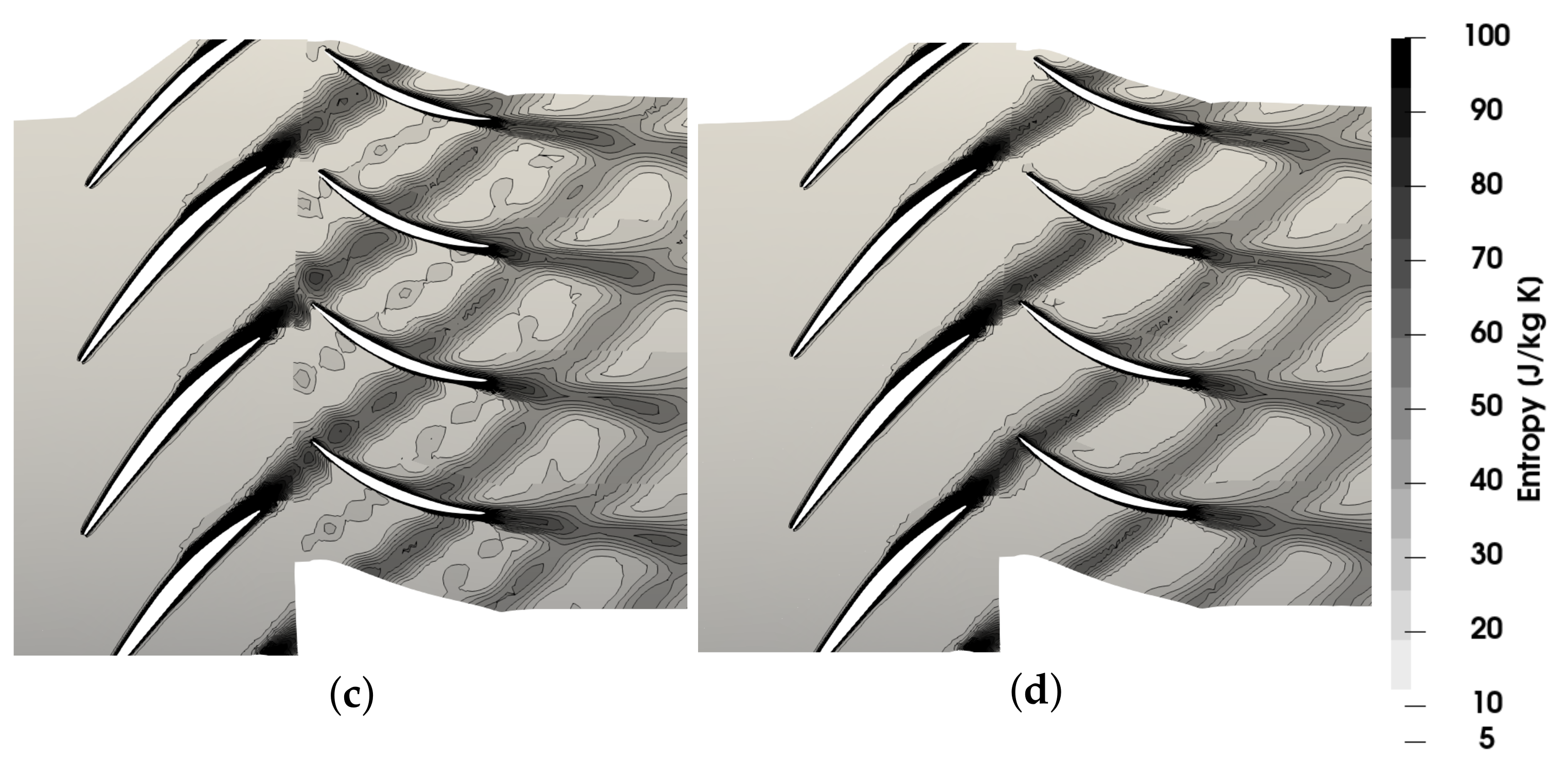
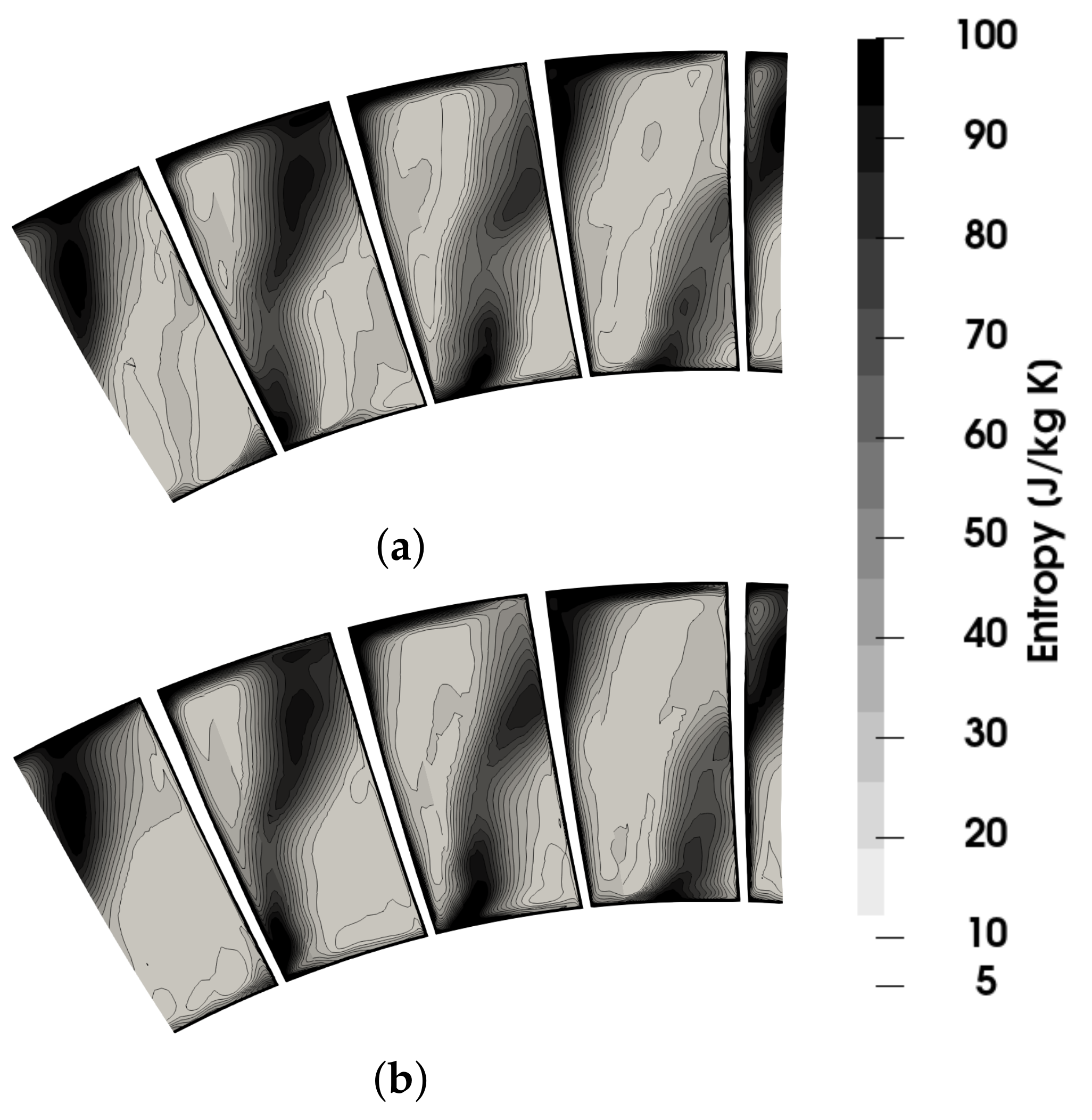
5.3. Numerical Application: NASA Stage 37
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations and Nomenclature
| CFD | Computational Fluid Dynamics |
| CPU | Central Processing Unit |
| HBM | Harmonic Balance Method |
| OF | OpenFOAM |
| Vector of conservative variables | |
| Vector of fluxes | |
| V | Control volume |
| Harmonic balance operator | |
| Time derivative operator | |
| Discrete Fourier transform matrix | |
| Discretized fluxes residual term | |
| Convective flux Jacobian | |
| Domain angular velocity vector | |
| Angular frequency corresponding to a known flow periodicity | |
| Interblade phase angle | |
| Azimuthal coordinate | |
| Number of blades in a row | |
| Number of snapshots for the HBM simulation | |
| m-th Fourier coefficient of Q | |
| Flow density | |
| Flow velocity | |
| Spectral radius of Roe matrix between cell i and j | |
| Pseudo time-step | |
| Physical time-step | |
| p | Flow pressure |
| c | Sound speed |
| H | Flow total enthalpy |
| E | Flow total energy |
| T | Flow temperature |
| Dynamic viscosity | |
| Prandtl number | |
| Specific heat at constant pressure | |
| Viscous stress tensor | |
| Heat flux vector | |
| Surface normal vector | |
| Matrix of the equations system |
References
- Tucker, P. Computation of unsteady turbomachinery flows: Part 1—Progress and challenges. Prog. Aerosp. Sci. 2011, 47, 522–545. [Google Scholar] [CrossRef]
- Tucker, P. Computation of unsteady turbomachinery flows: Part 2—LES and hybrids. Prog. Aerosp. Sci. 2011, 47, 546–569. [Google Scholar] [CrossRef]
- Berkooz, G.; Holmes, P.; Lumley, J. The Proper Orthogonal Decomposition in the Analysis of Turbulent Flows. Annu. Rev. Fluid Mech. 2003, 25, 539–575. [Google Scholar] [CrossRef]
- He, L.; Ning, W. Efficient Approach for Analysis of Unsteady Viscous Flows in Turbomachines. AIAA J. 1998, 36, 2005–2012. [Google Scholar] [CrossRef]
- Hall, K.C.; Thomas, J.P.; Clark, W.S. Computation of Unsteady Nonlinear Flows in Cascades Using a Harmonic Balance Technique. AIAA J. 2002, 40, 879–886. [Google Scholar] [CrossRef] [Green Version]
- Ekici, K.; Hall, K.C. Harmonic Balance Analysis of Limit Cycle Oscillations in Turbomachinery. AIAA J. 2011, 49, 1478–1487. [Google Scholar] [CrossRef]
- Ekici, K.; Hall, K.C. Nonlinear Analysis of Unsteady Flows in Multistage Turbomachines Using Harmonic Balance. AIAA J. 2007, 45, 1047–1057. [Google Scholar] [CrossRef]
- Thomas, J.P.; Dowell, E.H.; Hall, K.C. Nonlinear Inviscid Aerodynamic Effects on Transonic Divergence, Flutter, and Limit-Cycle Oscillations. AIAA J. 2002, 40, 638–646. [Google Scholar] [CrossRef]
- Jameson, A.; Alonso, J.; McMullen, M. Application of a non-linear frequency domain solver to the Euler and Navier-Stokes equations. In Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 14–17 January 2002. [Google Scholar]
- Van der Weide, E.; Gopinath, A.; Jameson, A. Turbomachinery Applications with the Time Spectral Method. In Proceedings of the 35th AIAA Fluid Dynamics Conference and Exhibit, Toronto, ON, Canada, 6–9 June 2005; p. 4905. [Google Scholar]
- Gopinath, A.; van der Weide, E.; Alonso, J.; Jameson, A.; Ekici, K.; Hall, K. Three-Dimensional Unsteady Multi-stage Turbomachinery Simulations Using the Harmonic Balance Technique. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 14–17 January 2007. [Google Scholar]
- Sicot, F.; Dufour, G.; Gourdain, N. A time-domain harmonic balance method for rotor/stator interactions. J. Turbomach. 2012, 134. [Google Scholar] [CrossRef] [Green Version]
- Su, X.; Yuan, X. Implicit solution of time spectral method for periodic unsteady flows. Int. J. Numer. Methods Fluids 2010, 63, 860–876. [Google Scholar] [CrossRef]
- Woodgate, M.A.; Badcock, K.J. Implicit Harmonic Balance Solver for Transonic Flow with Forced Motions. AIAA J. 2009, 47, 893–901. [Google Scholar] [CrossRef]
- Sicot, F.; Puigt, G.; Montagnac, M. Block-Jacobi Implicit Algorithms for the Time Spectral Method. AIAA J. 2008, 46, 3080–3089. [Google Scholar] [CrossRef]
- Thomas, J.P.; Custer, C.H.; Dowell, E.H.; Hall, K.C.; Corre, C. Compact Implementation Strategy for a Harmonic Balance Method Within Implicit Flow Solvers. AIAA J. 2013, 51, 1374–1381. [Google Scholar] [CrossRef]
- Nimmagadda, S.; Economon, T.D.; Alonso, J.J.; da Silva, C.R.I. Robust uniform time sampling approach for the harmonic balance method. In Proceedings of the 46th AIAA Fluid Dynamics Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Cvijetić, G.; Gatin, I.; Vukčević, V.; Jasak, H. Harmonic Balance developments in OpenFOAM. Comput. Fluids 2018, 172, 632–643. [Google Scholar] [CrossRef]
- Oliani, S.; Casari, N.; Pinelli, M.; Suman, A.; Carnevale, M. Numerical study of a centrifugal pump using Harmonic Balance Method in OpenFOAM. In Proceedings of the 34th International Conference on Efficiency, Cost, Optimization, Simulation and Environmental Impact of Energy Systems, Taormina, Italy, 28 June–2 July 2021. [Google Scholar]
- Hall, K.C.; Ekici, K.; Thomas, J.P.; Dowell, E.H. Harmonic balance methods applied to computational fluid dynamics problems. Int. J. Comput. Fluid Dyn. 2013, 27, 52–67. [Google Scholar] [CrossRef]
- He, L. Fourier methods for turbomachinery applications. Prog. Aerosp. Sci. 2010, 46, 329–341. [Google Scholar] [CrossRef]
- Luo, H.; Baum, J.D.; Löhner, R. A Fast, Matrix-free Implicit Method for Compressible Flows on Unstructured Grids. J. Comput. Phys. 1998, 146, 664–690. [Google Scholar] [CrossRef] [Green Version]
- Blazek, J. Computational Fluid Dynamics: Principles and Applications, 3rd ed.; Butterworth-Heinemann: Woburn, MA, USA, 2015. [Google Scholar]
- Saad, Y.; Schultz, M.H. GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems. Siam J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef] [Green Version]
- Yoon, S.; Jameson, A. Lower-upper Symmetric-Gauss-Seidel method for the Euler and Navier-Stokes equations. AIAA J. 1988, 26, 1025–1026. [Google Scholar] [CrossRef] [Green Version]
- Heyns, J.; Oxtoby, O. Modelling high-speed viscous flow in OpenFOAM®. In Proceedings of the 9th South African Conference on Computational and Applied Mechanics, Somerset West, South Africa, 14–16 January 2014. [Google Scholar]
- Dunham, J. CFD Validation for Propulsion System Components; Technical Report AR-355; AGARD: Neuilly-sur-Seine, France, 1998. [Google Scholar]
- Reid, L.; Moore, R.D. Design and Overall Performance of Four Highly Loaded, High Speed Inlet Stages for an Advanced High-Pressure-Ratio Core Compressor; Technical Report 1337; NASA: Washington, DC, USA, 1978.
- Suder, K.L. Experimental Investigation of the Flow Field in a Transonic, Axial Flow Compressor with Respect to the Development of Blockage and Loss; Technical Report 107310; NASA: Washington, DC, USA, 1996.
- McMullen, M.S.; Jameson, A.; Alonso, J.J. Demonstration of Nonlinear Frequency Domain Methods. AIAA J. 2006, 44, 1428–1435. [Google Scholar] [CrossRef] [Green Version]
- Frey, C.; Ashcroft, G.; Kersken, H. Simulations of Unsteady Blade Row Interactions Using Linear and Non-Linear Frequency Domain Methods. In Proceedings of the ASME Turbo Expo 2015: Turbomachinery Technical Conference and Exposition, Montreal, QC, Canada, 15–19 January 2015. [Google Scholar]
- Lakshminarayana, B.; Davino, R. Mean Velocity and Decay Characteristics of the Guidevane and Stator Blade Wake of an Axial Flow Compressor. J. Eng. Power 1980, 102, 50–60. [Google Scholar] [CrossRef]
- Gomar, A.; Bouvy, Q.; Sicot, F.; Dufour, G.; Cinnella, P.; François, B. Convergence of Fourier-based time methods for turbomachinery wake passing problems. J. Comput. Phys. 2014, 278, 229–256. [Google Scholar] [CrossRef] [Green Version]
- Guédeney, T.; Gomar, A.; Gallard, F.; Sicot, F.; Dufour, G.; Puigt, G. Non-uniform time sampling for multiple-frequency harmonic balance computations. J. Comput. Phys. 2013, 236, 317–345. [Google Scholar] [CrossRef] [Green Version]
- Tyler, J.M.; Sofrin, T.G. Axial Flow Compressor Noise Studies; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1962. [Google Scholar]
- Crespo, J.; Contreras, J. On the Development of a Synchronized Harmonic Balance Method for Multiple Frequencies and its Application to LPT Flows. In Proceedings of the ASME Turbo Expo 2020: Turbomachinery Technical Conference and Exposition, London, UK, 22–26 June 2020. [Google Scholar]
- Greitzer, E.M.; Tan, C.S.; Graf, M.B. Internal Flow: Concepts and Applications; Cambridge Engine Technology Series; Cambridge University Press: New York, NY, USA, 2004. [Google Scholar]
- Erdos, J.I.; Alzner, E.; McNally, W. Numerical Solution of Periodic Transonic Flow through a Fan Stage. AIAA J. 1977, 15, 1559–1568. [Google Scholar] [CrossRef]
- Gerolymos, G.A.; Michon, G.J.; Neubauer, J. Analysis and Application of Chorochronic Periodicity in Turbomachinery Rotor/Stator Interaction Computations. J. Propuls. Power 2002, 18, 1139–1152. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Value | |
|---|---|---|
| Total pressure | 350 kPa | |
| Total temperature | 683 K | |
| Inlet | Turbulence intensity | 3% |
| Outlet | Pressure | 144 kPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliani, S.; Casari, N.; Carnevale, M. A New Framework for the Harmonic Balance Method in OpenFOAM. Machines 2022, 10, 279. https://doi.org/10.3390/machines10040279
Oliani S, Casari N, Carnevale M. A New Framework for the Harmonic Balance Method in OpenFOAM. Machines. 2022; 10(4):279. https://doi.org/10.3390/machines10040279
Chicago/Turabian StyleOliani, Stefano, Nicola Casari, and Mauro Carnevale. 2022. "A New Framework for the Harmonic Balance Method in OpenFOAM" Machines 10, no. 4: 279. https://doi.org/10.3390/machines10040279
APA StyleOliani, S., Casari, N., & Carnevale, M. (2022). A New Framework for the Harmonic Balance Method in OpenFOAM. Machines, 10(4), 279. https://doi.org/10.3390/machines10040279