
Nonlinear Adaptive Control with Asymmetric Pressure Difference Compensation of a Hydraulic Pressure Servo System Using Two High Speed On/Off Valves


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Model and Characteristic Analysis
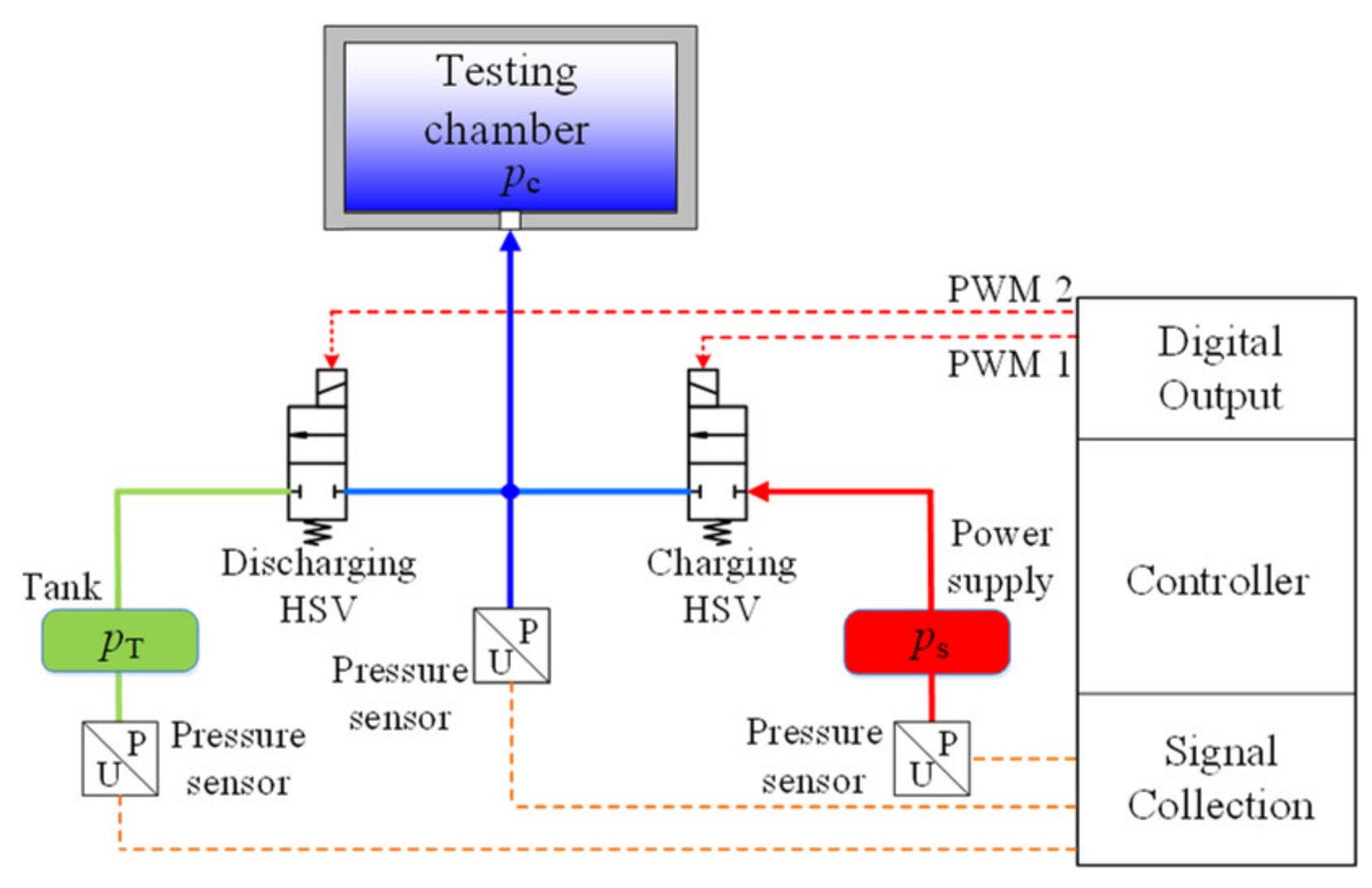
2.1. System Model
2.2. HSV Performance
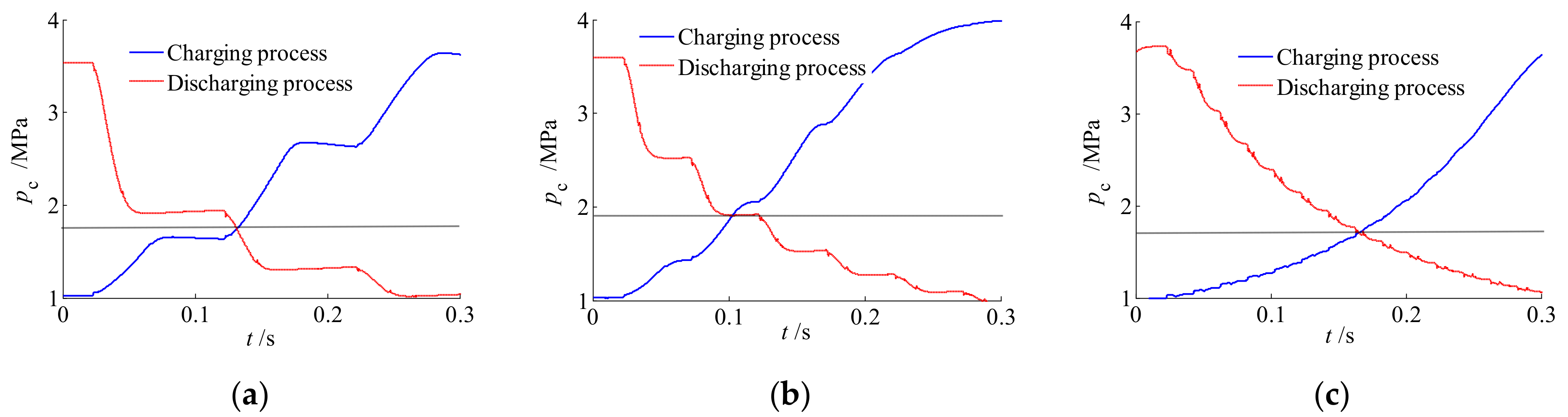
2.3. Characteristics of Charging and Discharging Process
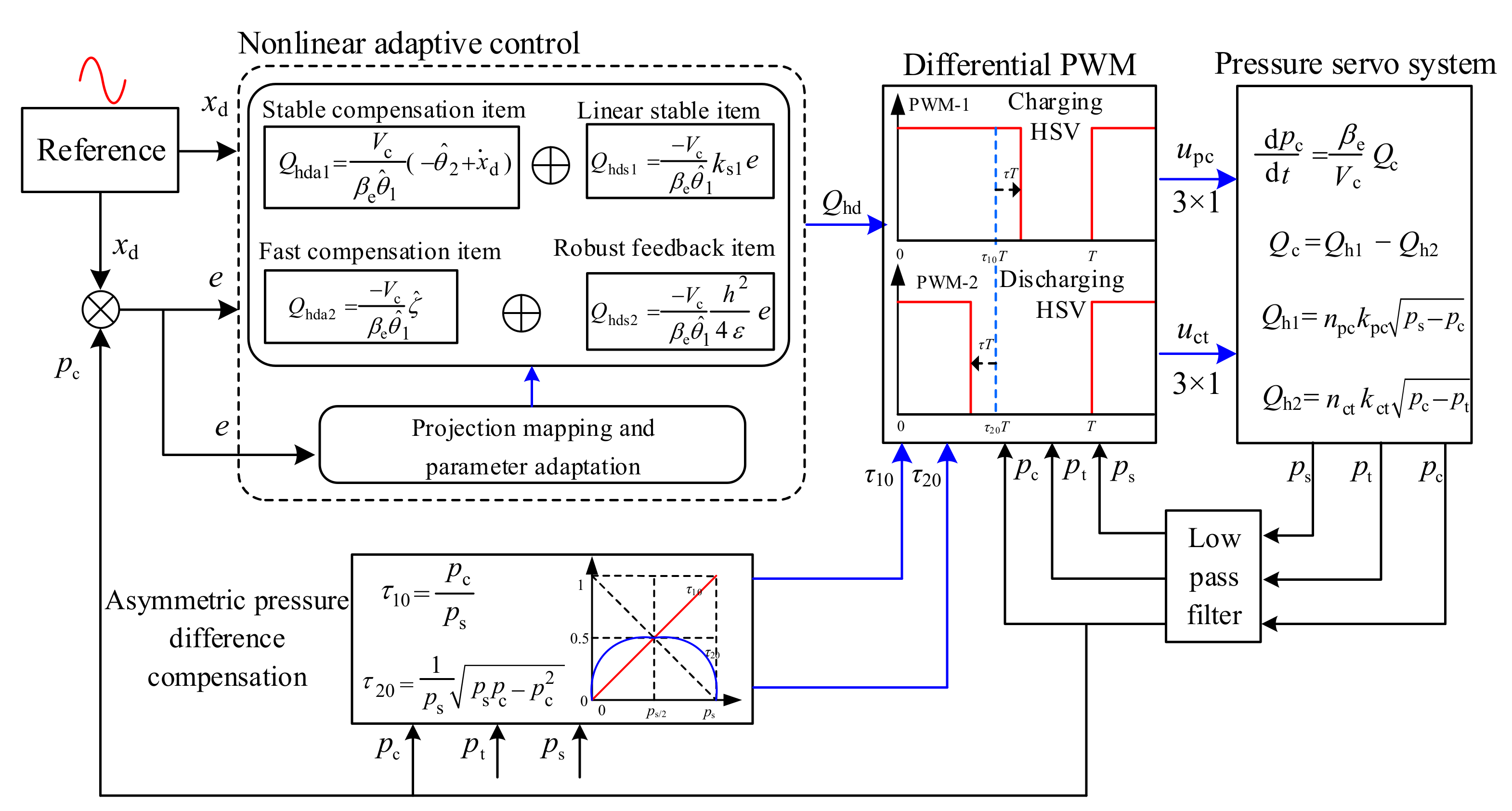
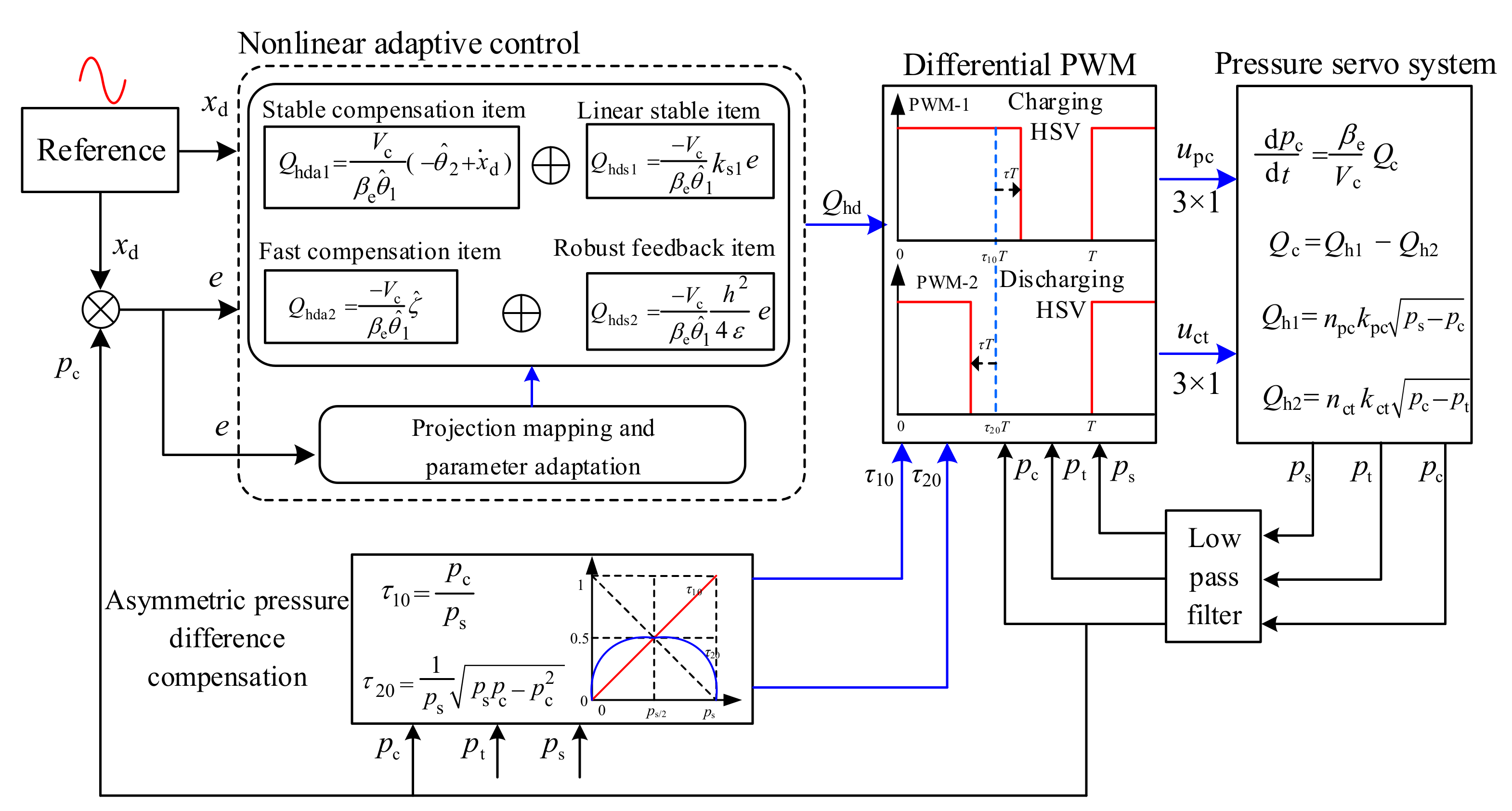
3. Pressure Controller Design
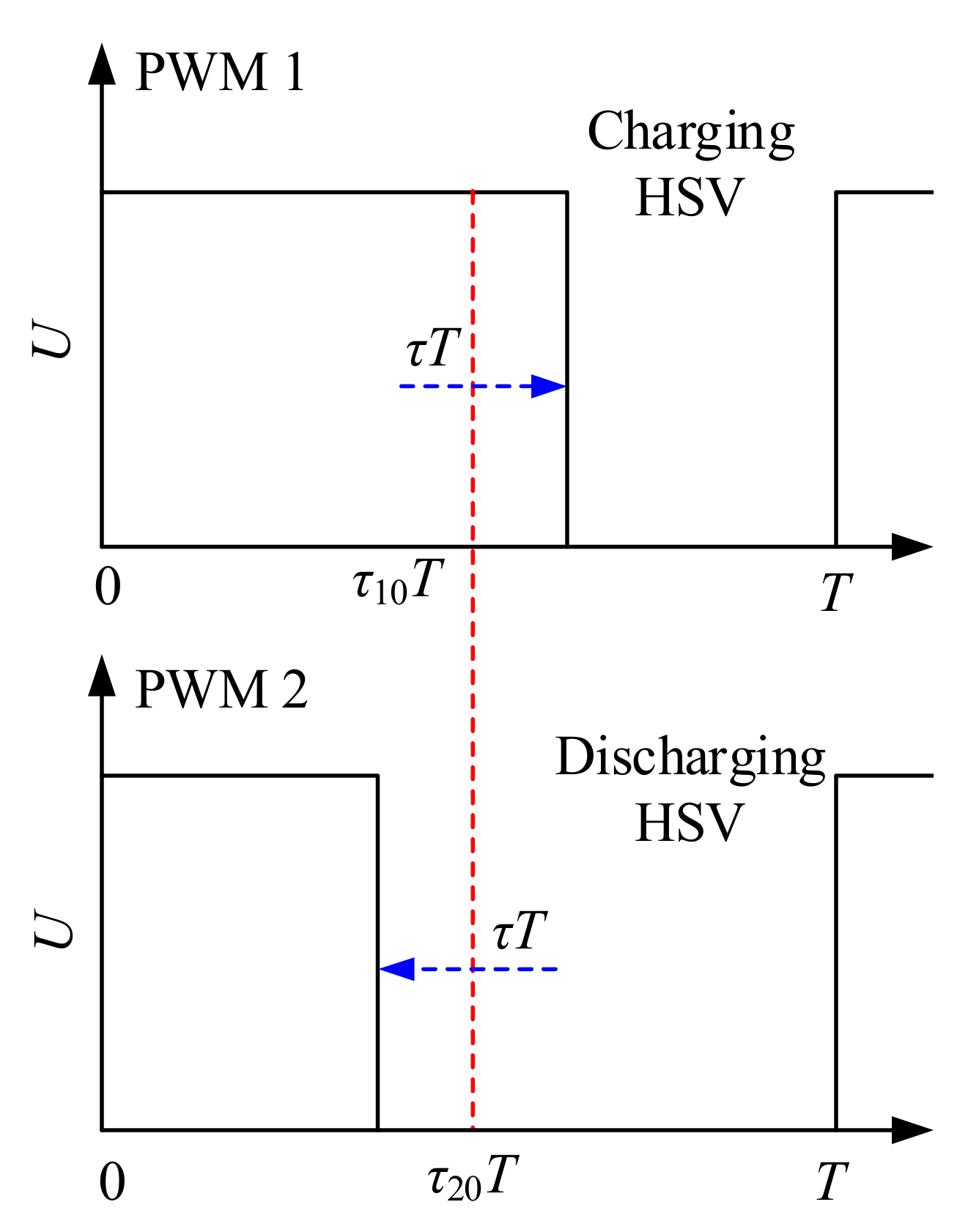
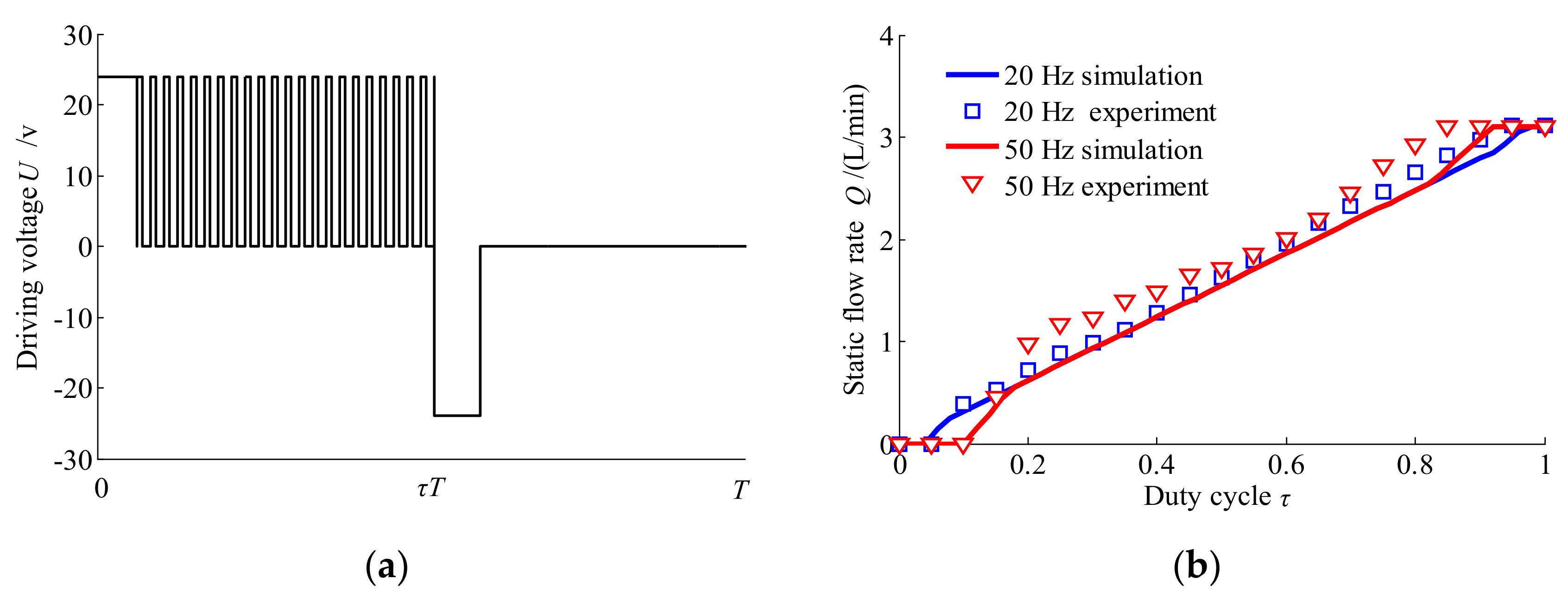
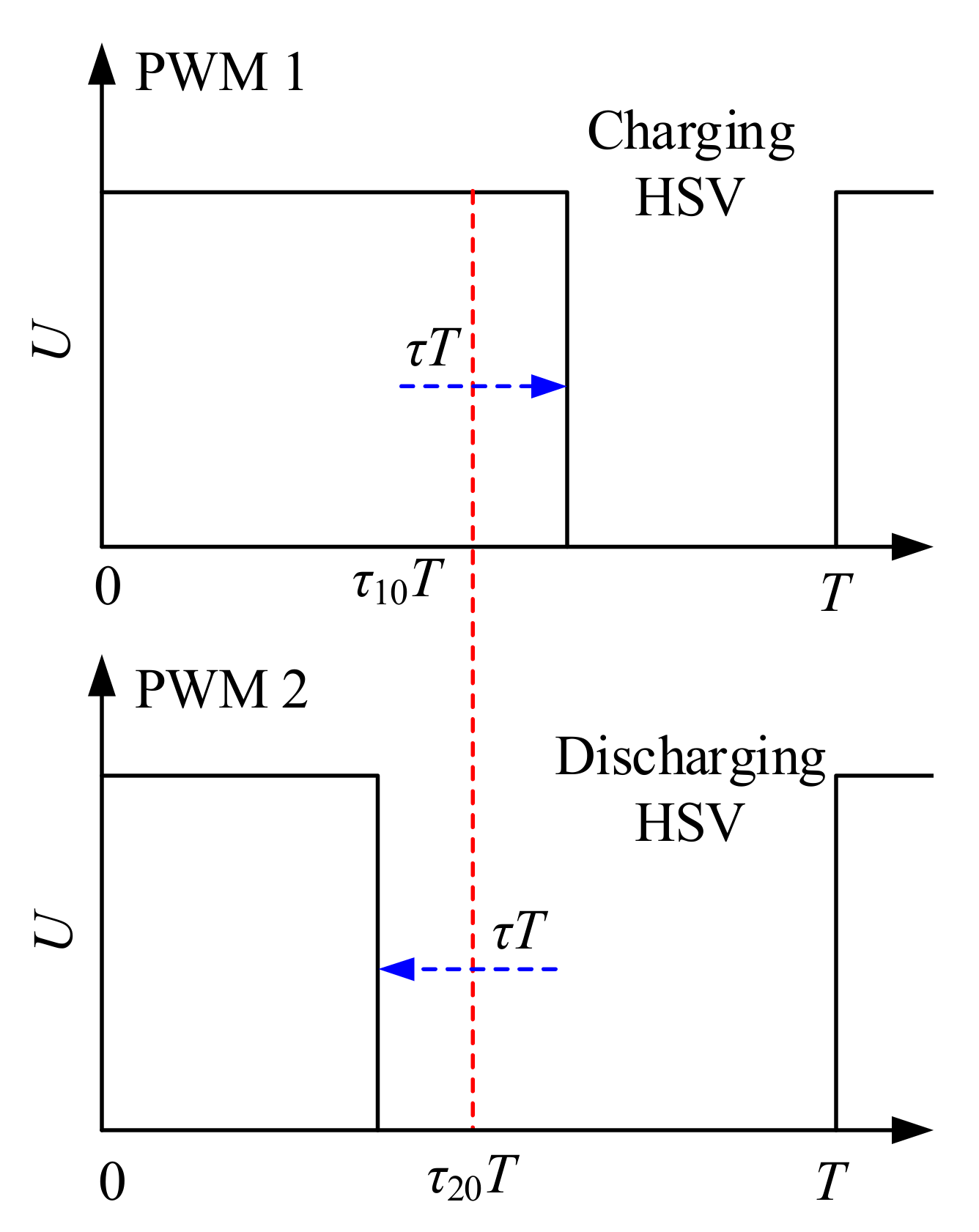
3.1. Differential PWM Scheme
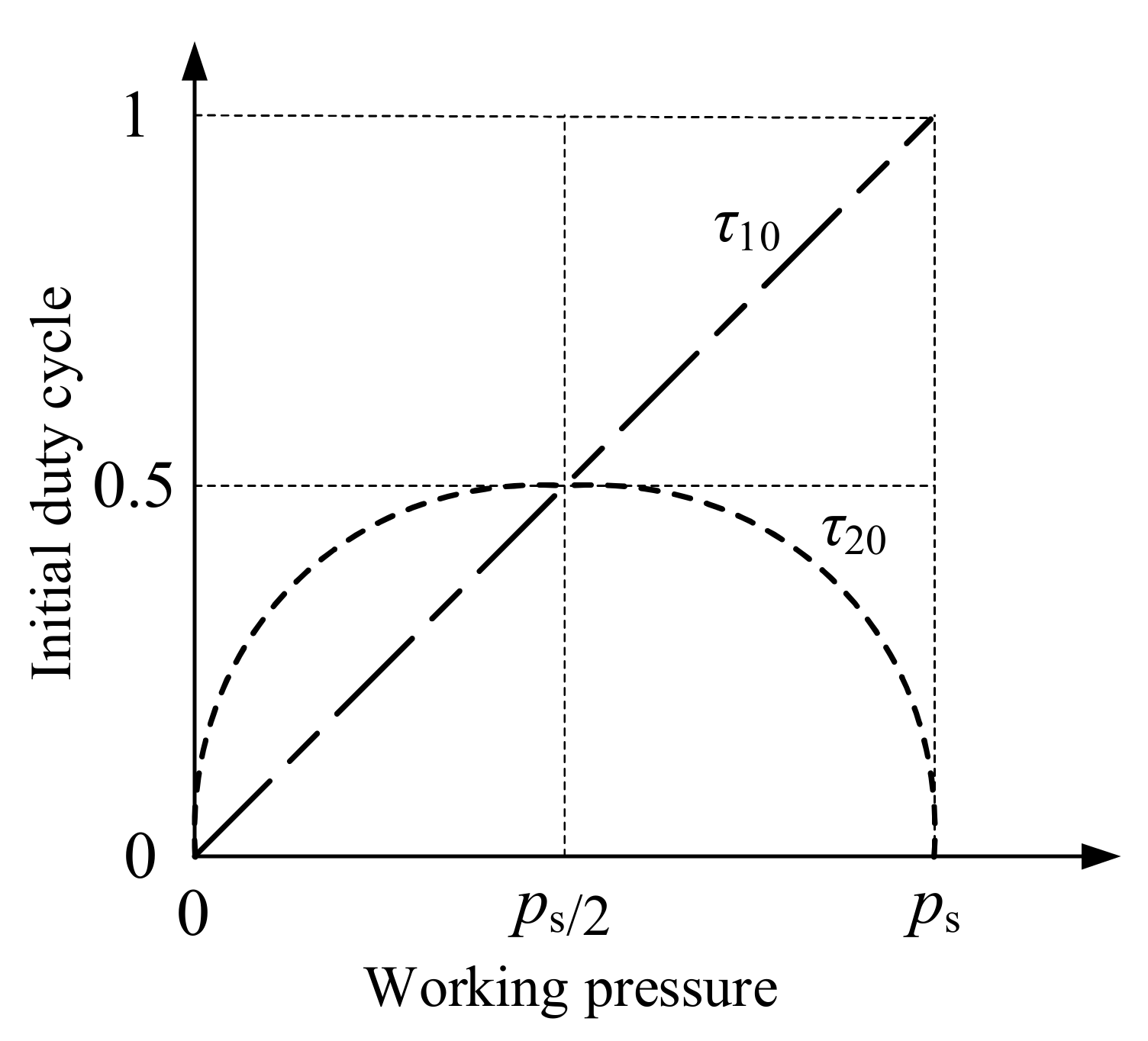
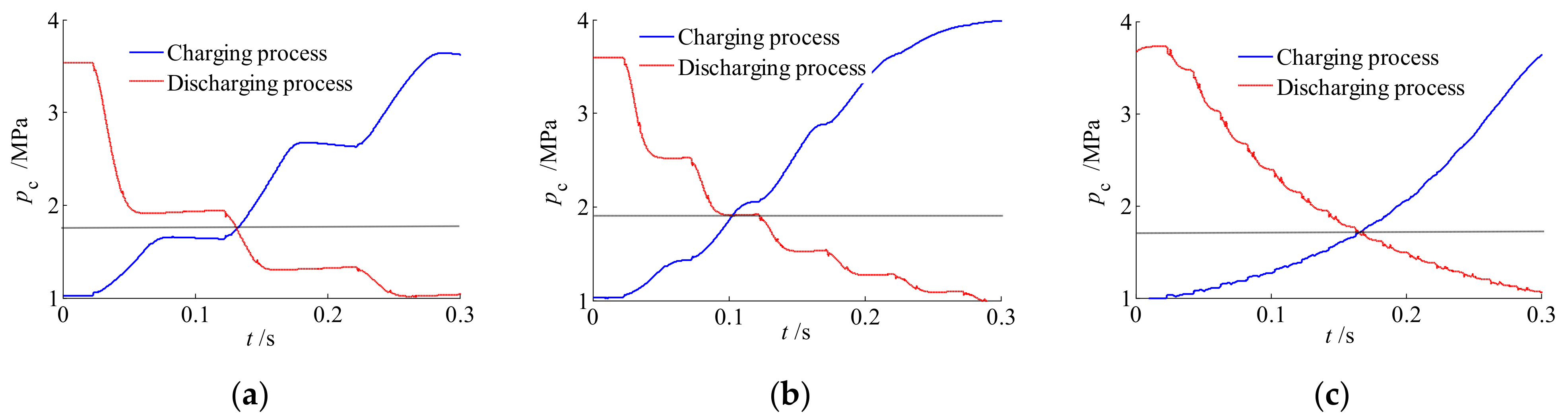
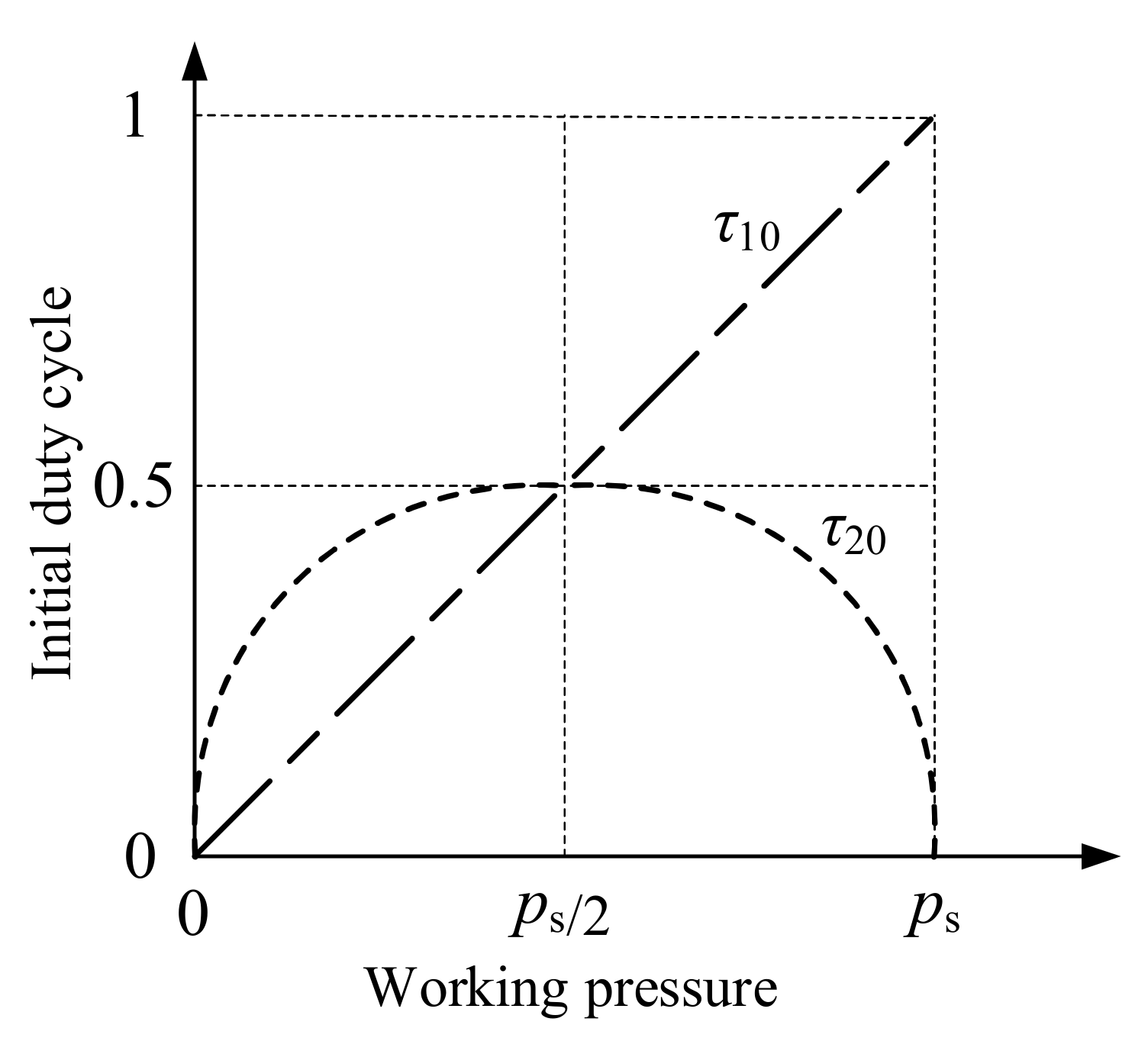
3.2. Asymmetric Pressure Difference Compensation (APDC)
- (a)
- When the working pressure pc is small (<ps/2), it means that the charging ability is stronger than the discharging ability because the pressure difference of the charging HSV is larger than that of the discharging HSV. To ensure that the charging ability equals the discharging ability, τ20 should be greater than τ10.
- (b)
- When the working pressure pc is moderate (=ps/2), it means that the charging ability is the same as the discharging ability because the pressure difference of the charging HSV is same as that of the discharging HSV. To ensure that the charging ability equals the discharging ability, τ20 equals τ10.
- (c)
- When the working pressure pc is large (>ps/2), it means that the charging ability is weaker than the discharging ability because the pressure difference of the charging HSV is smaller than that of the discharging HSV. To ensure that the charging ability equals the discharging ability, τ10 should be greater than τ20.
3.3. NonlinearAdaptive Controller (NAC)
- (1)
- Controller design
- (2)
- Parameter estimation and stability proof.
4. Simulation Results
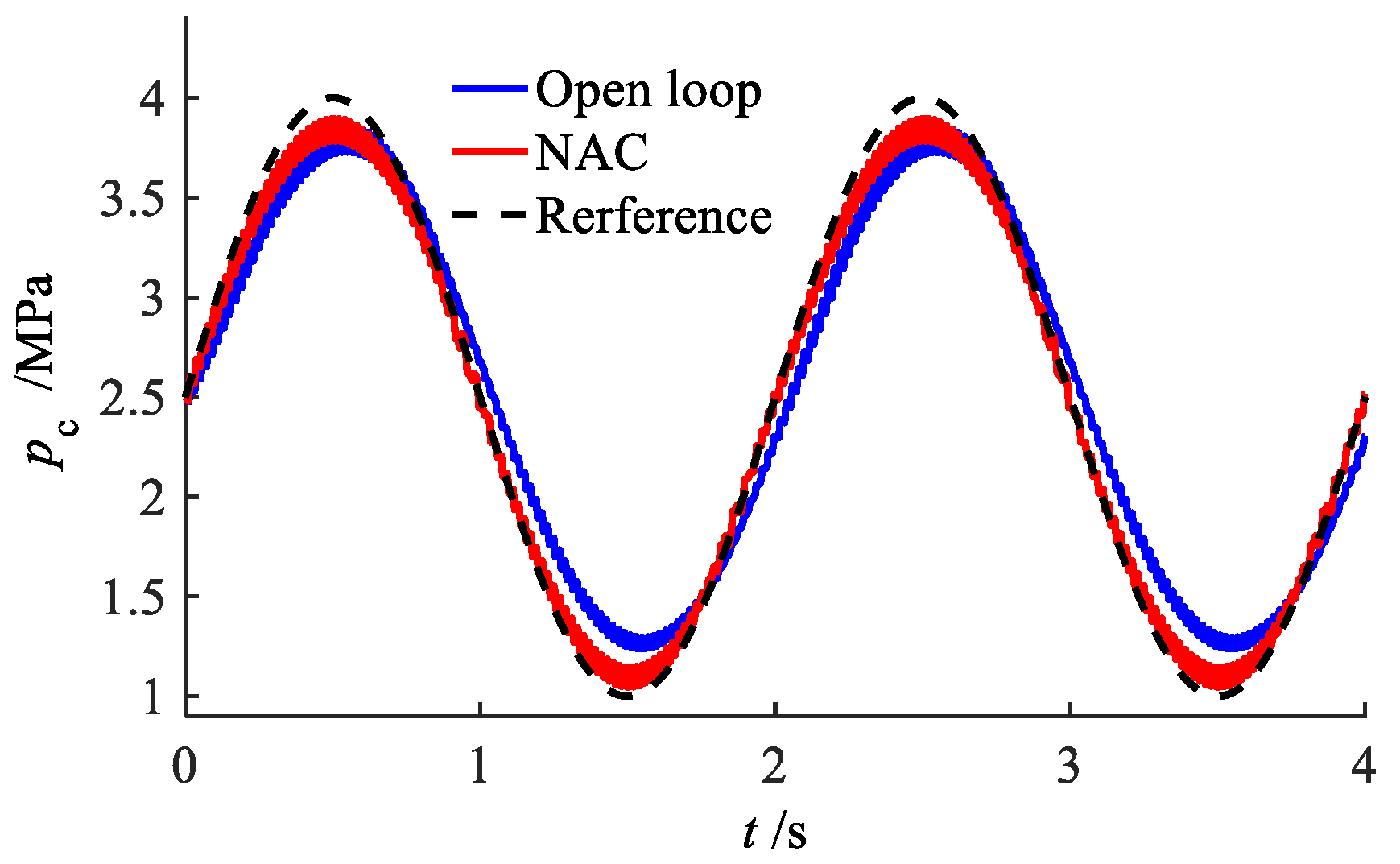
4.1. Open-Loop Control Characteristics
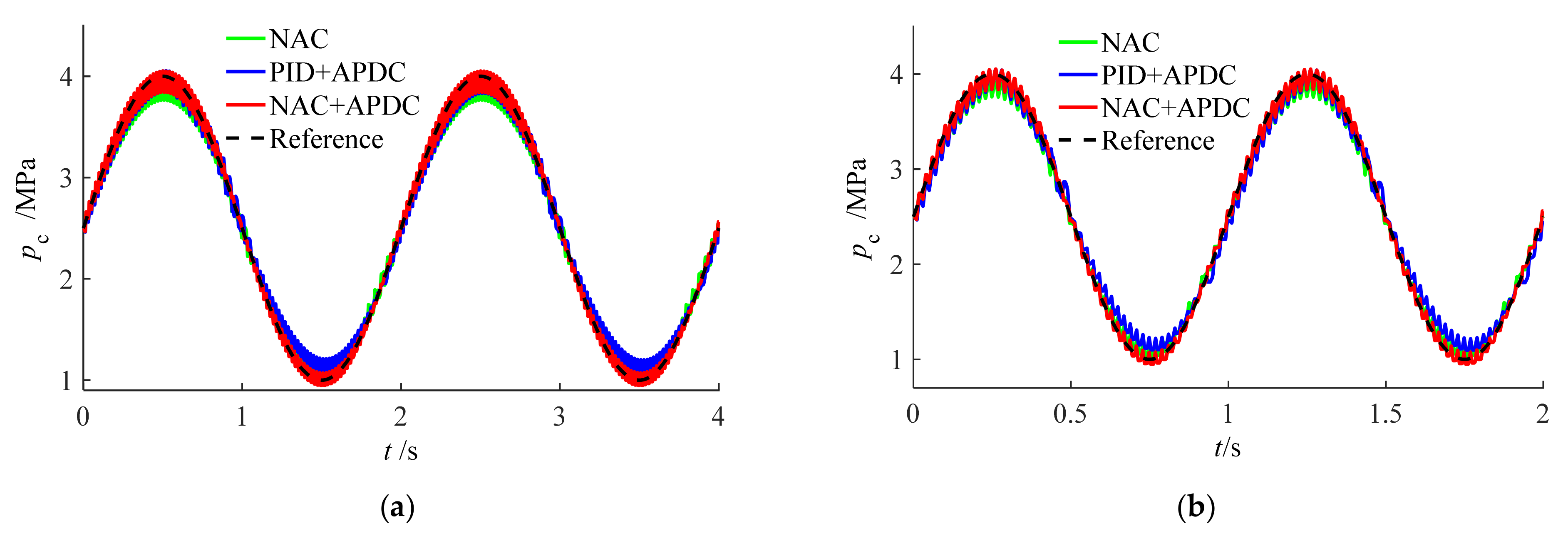
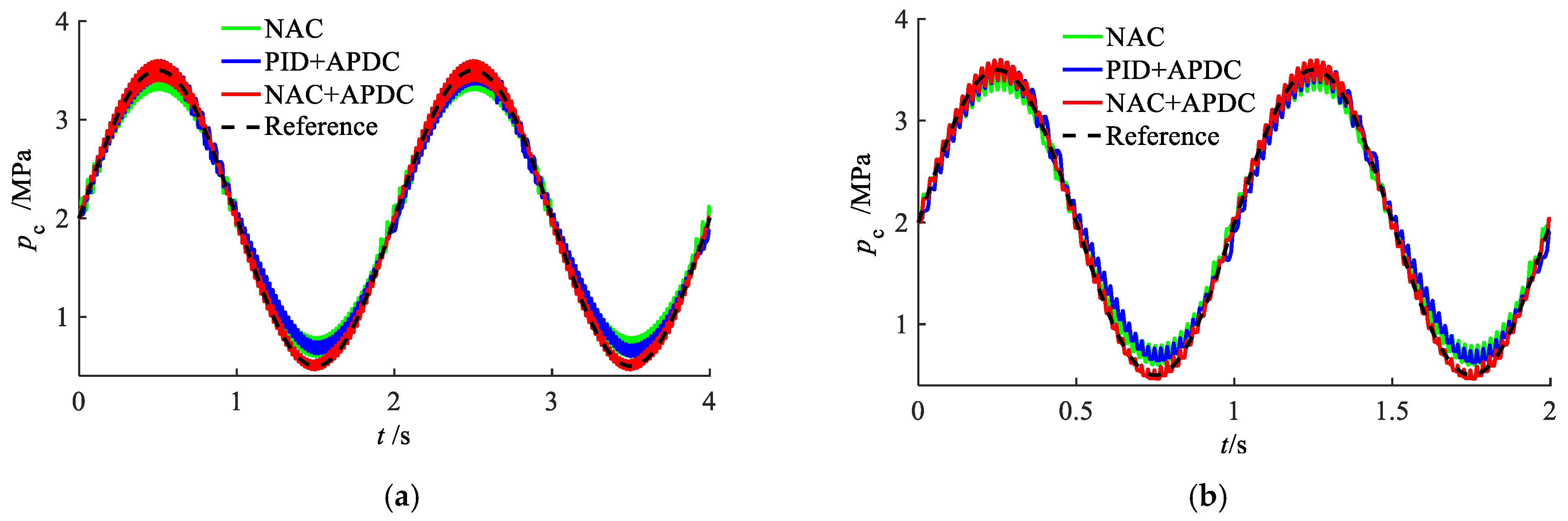
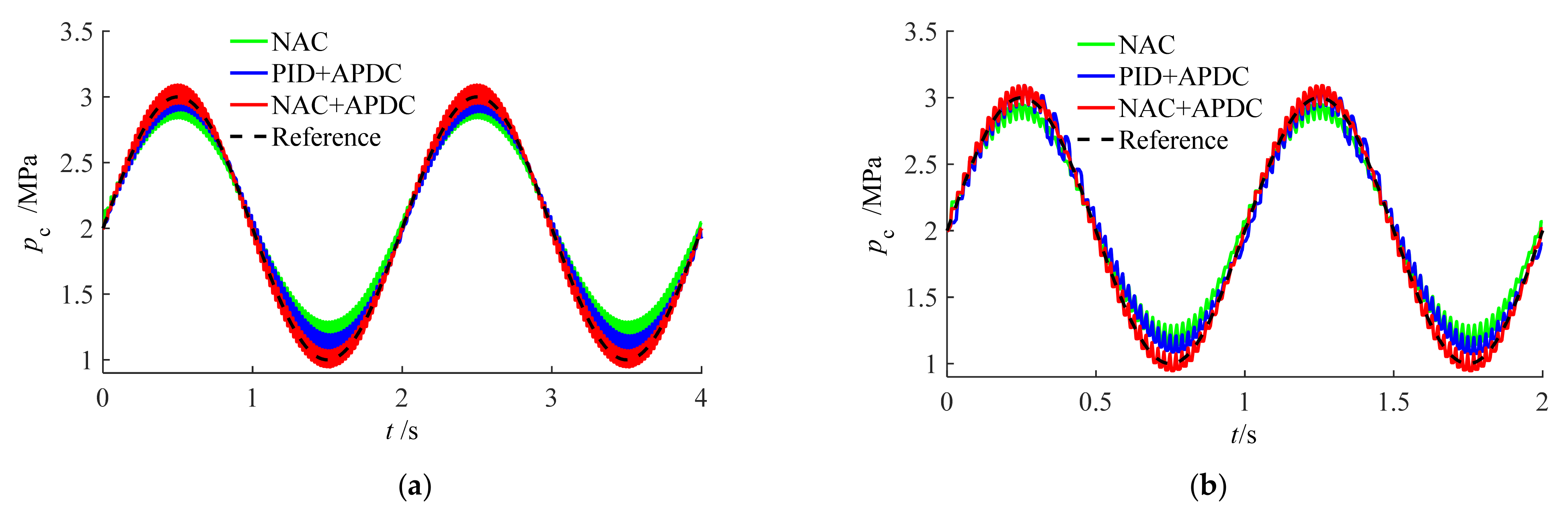
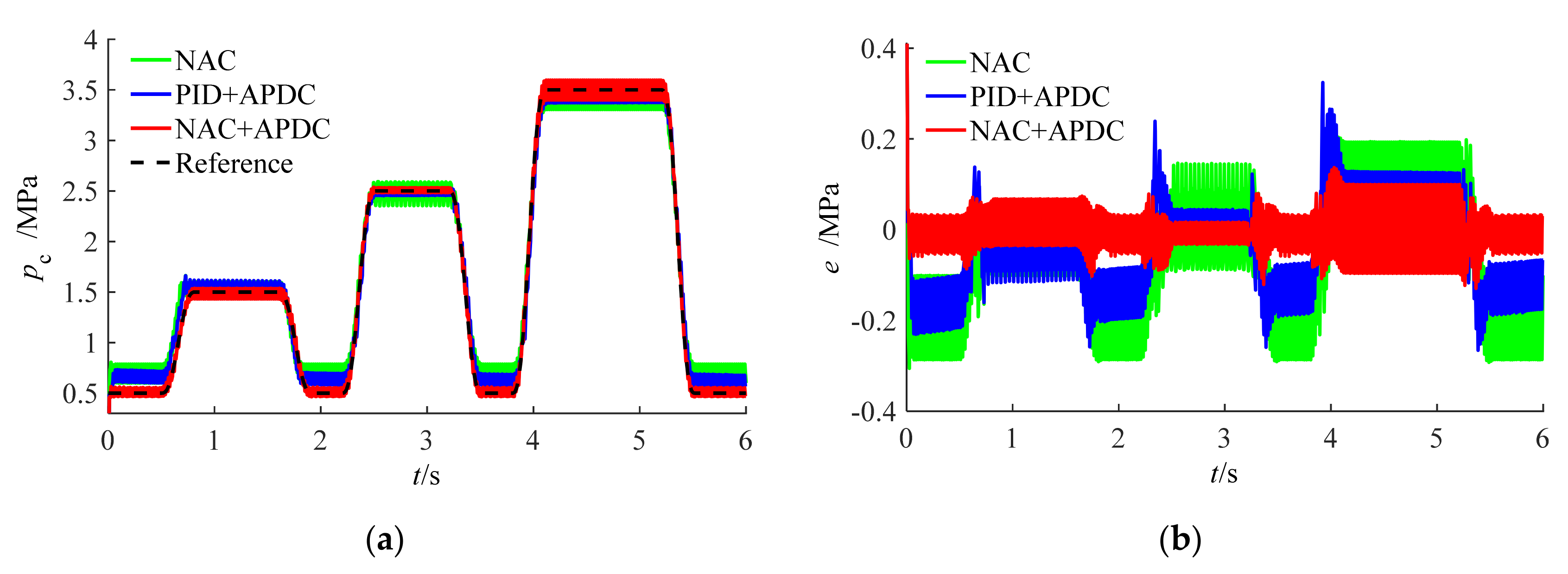
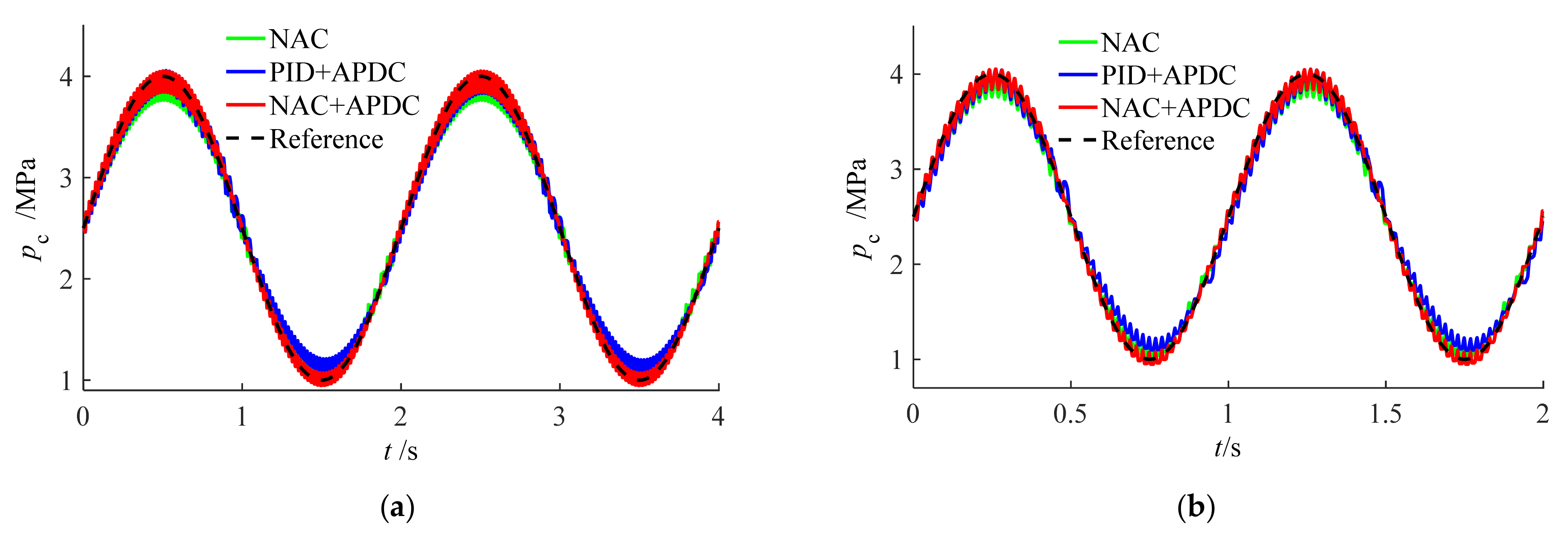
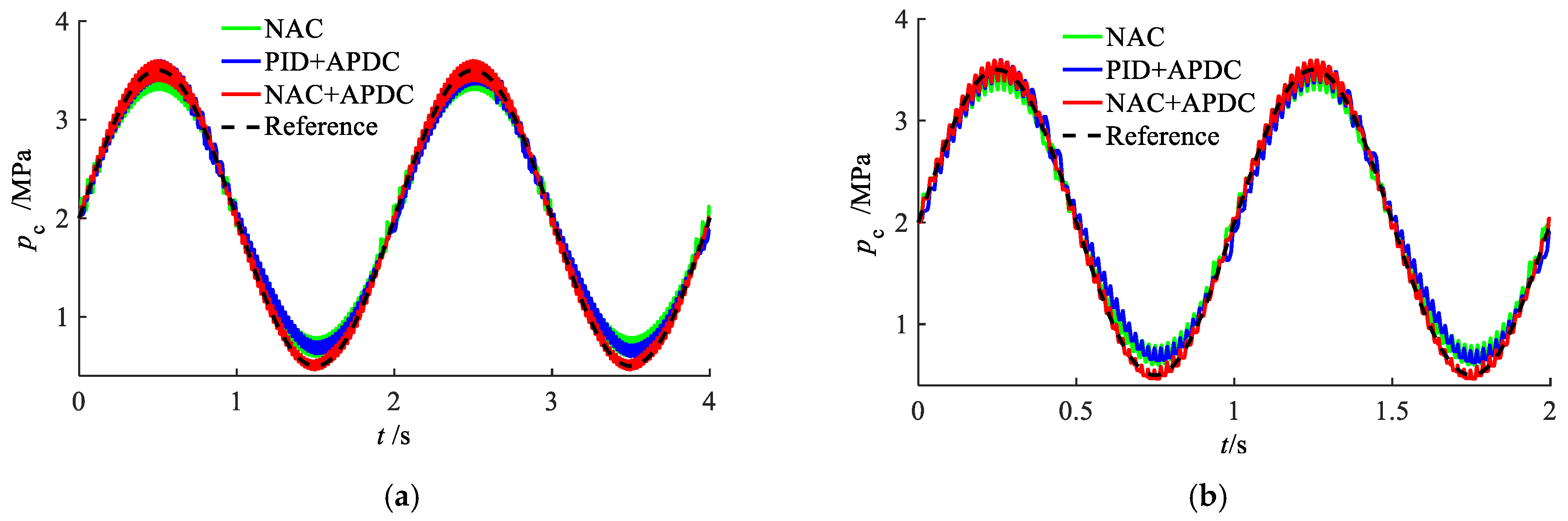
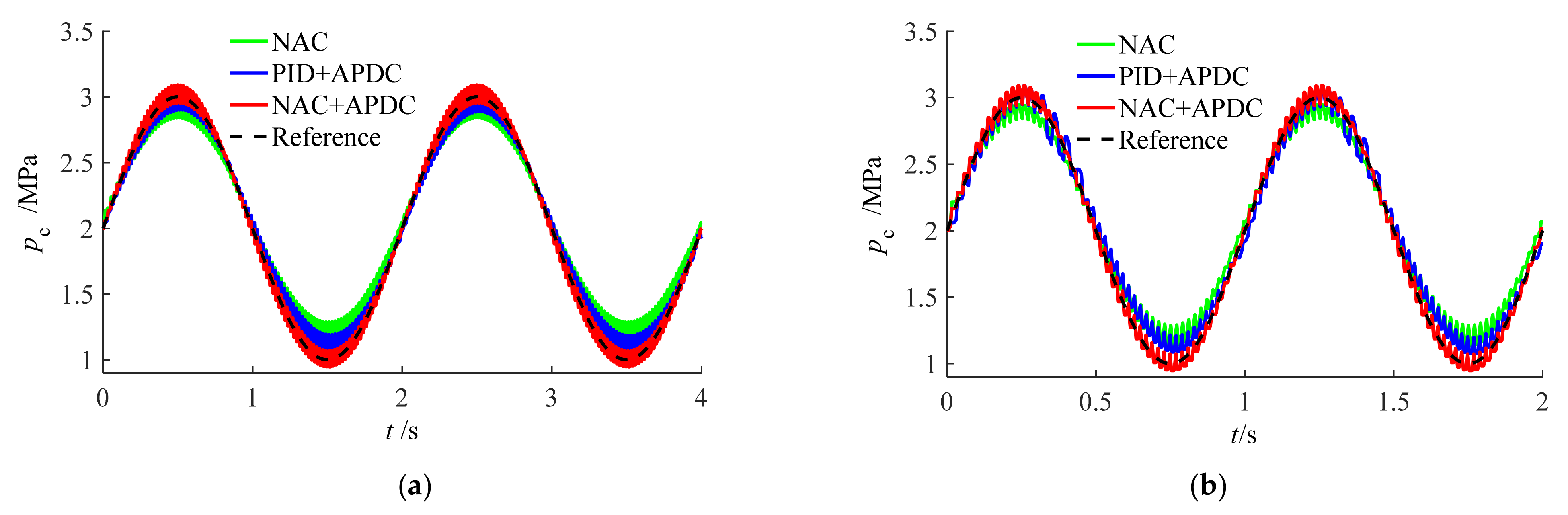
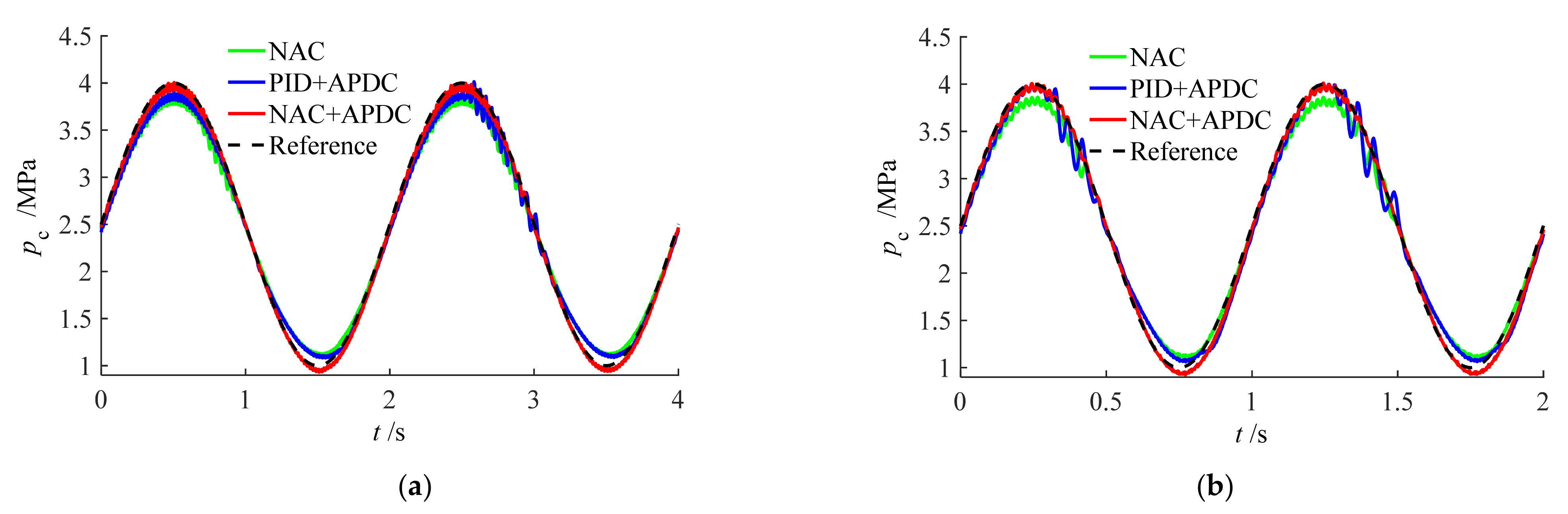
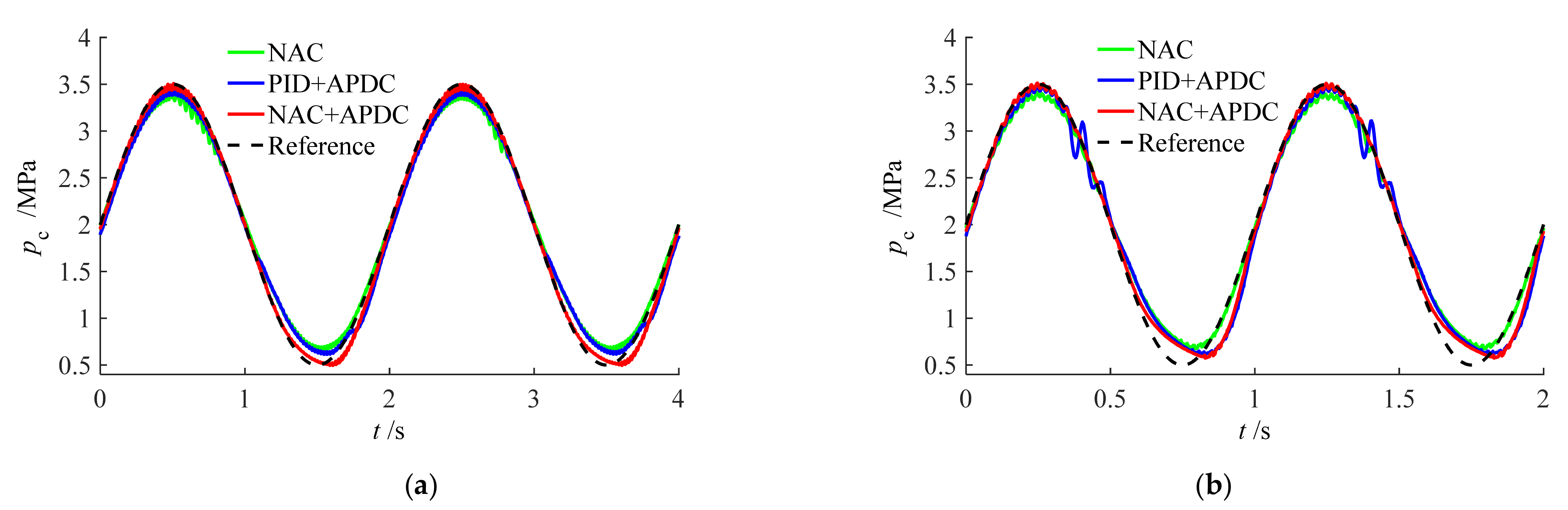
4.2. Tracking Performance of Different Controllers
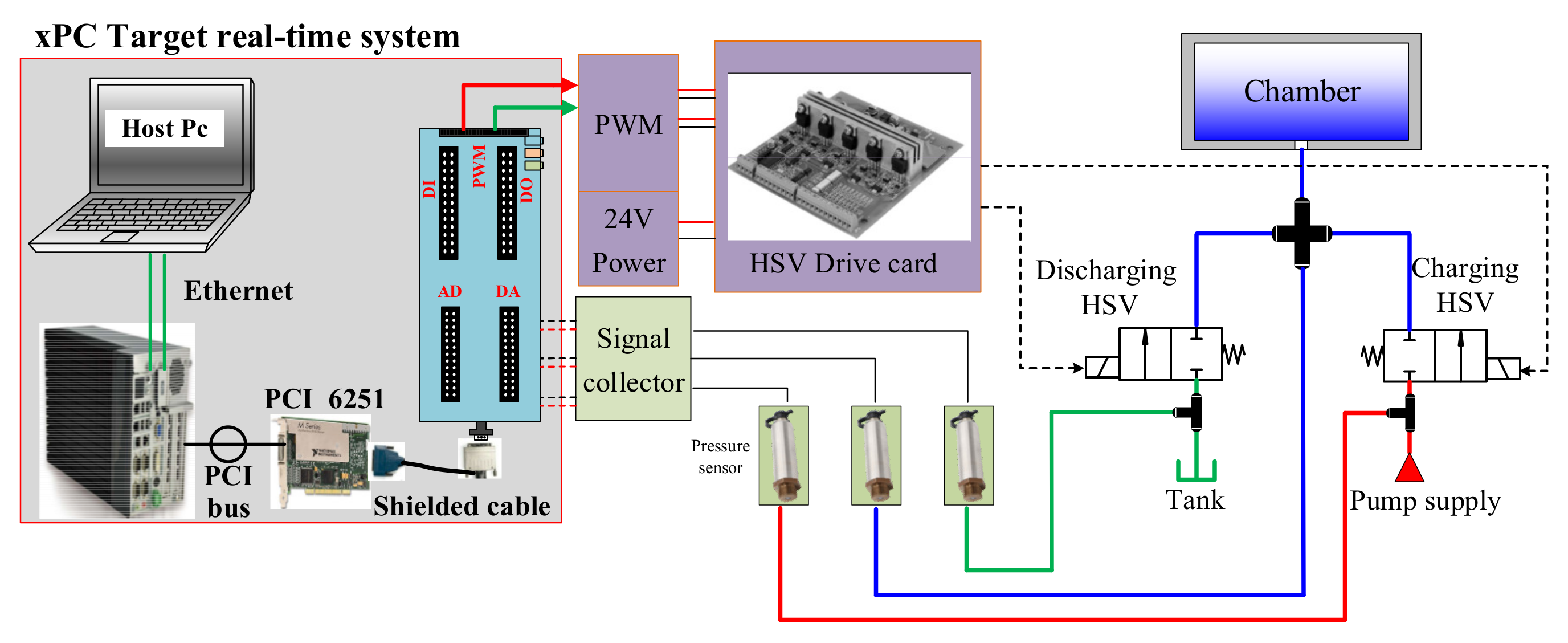
5. Experimental Research
5.1. Characteristics of Charging and Discharging Process
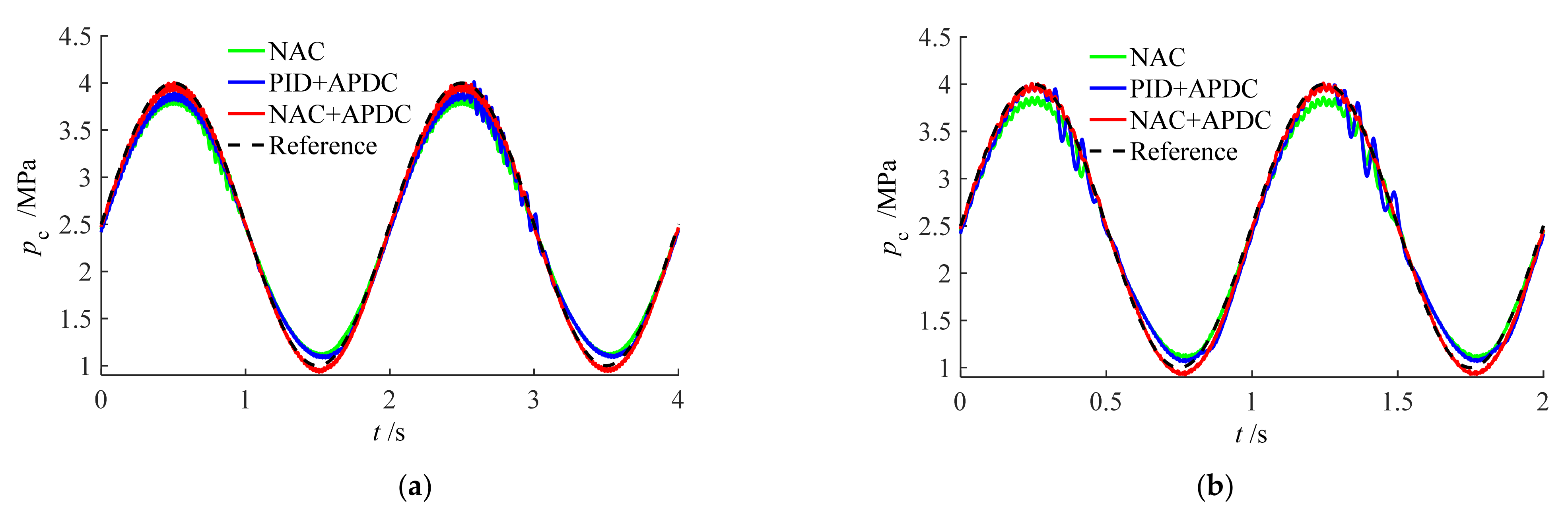
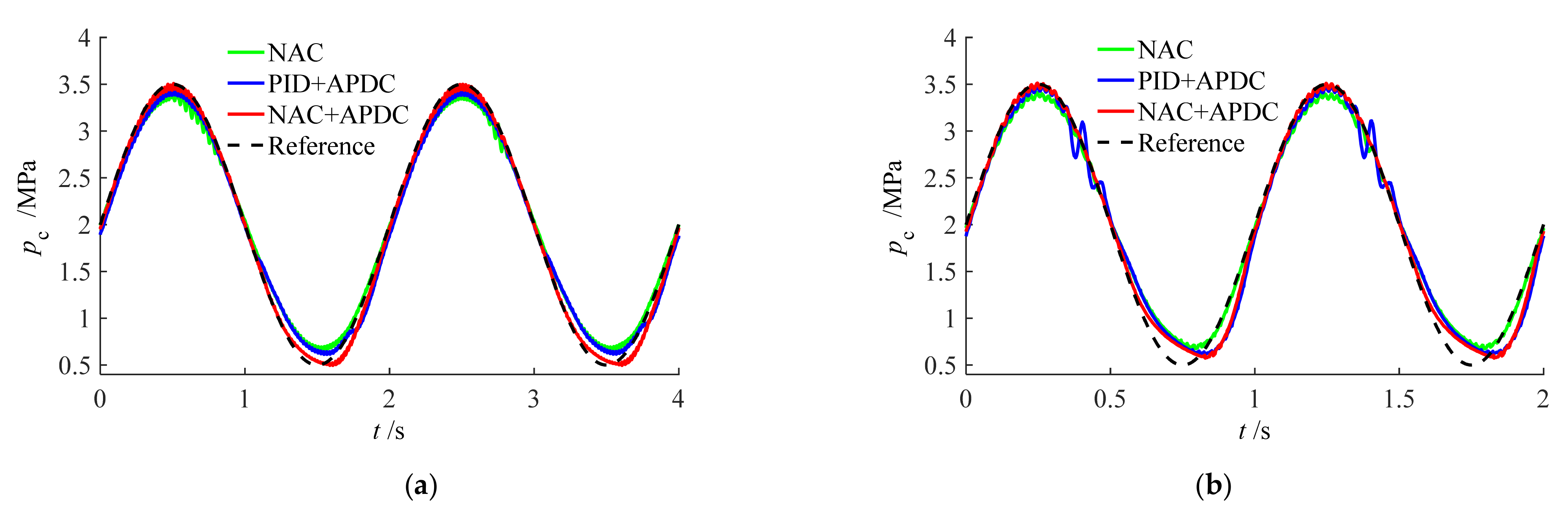
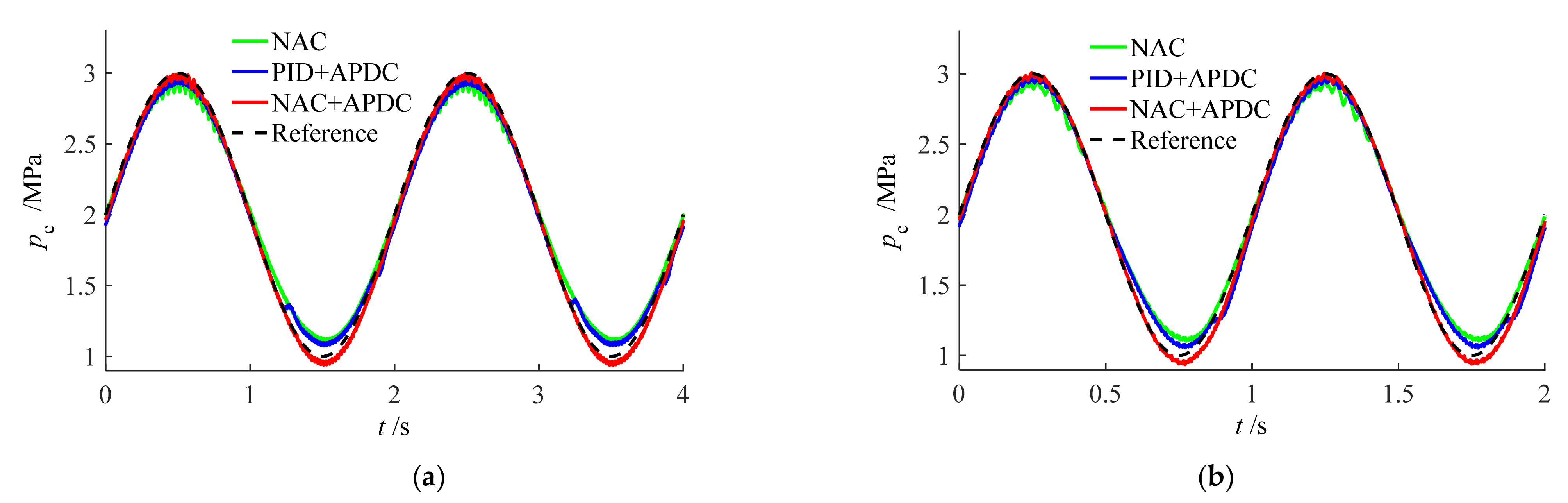
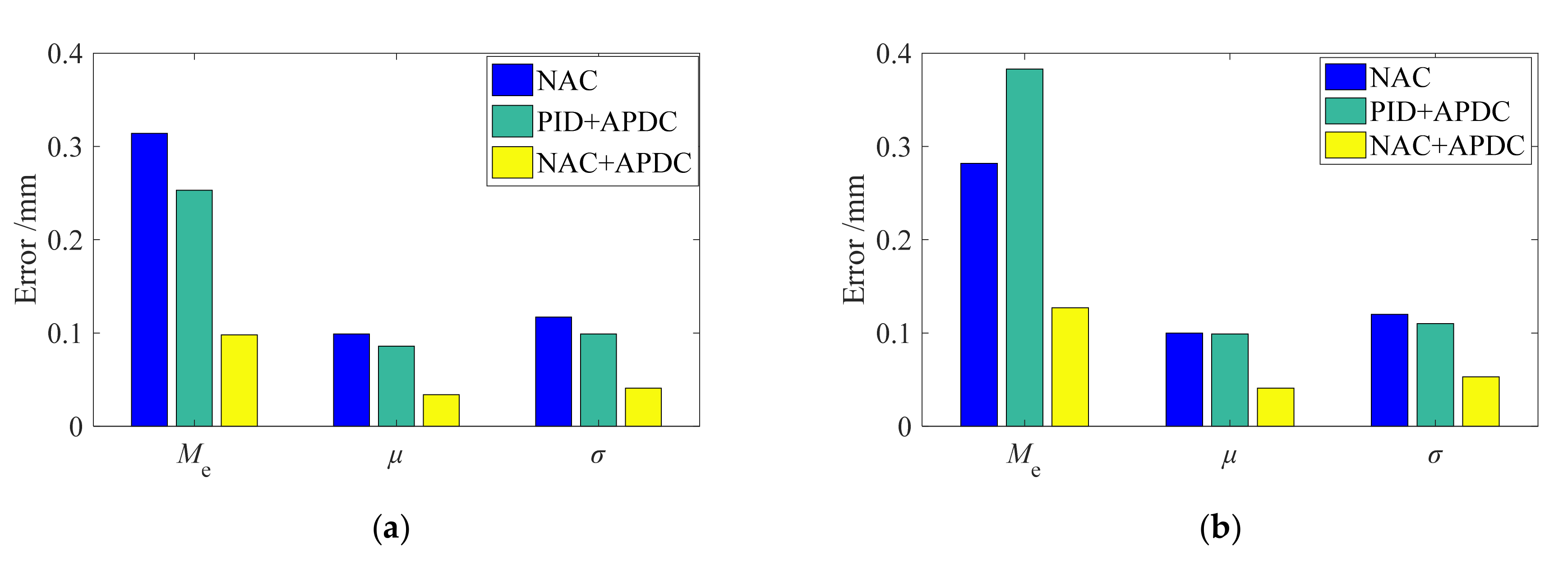
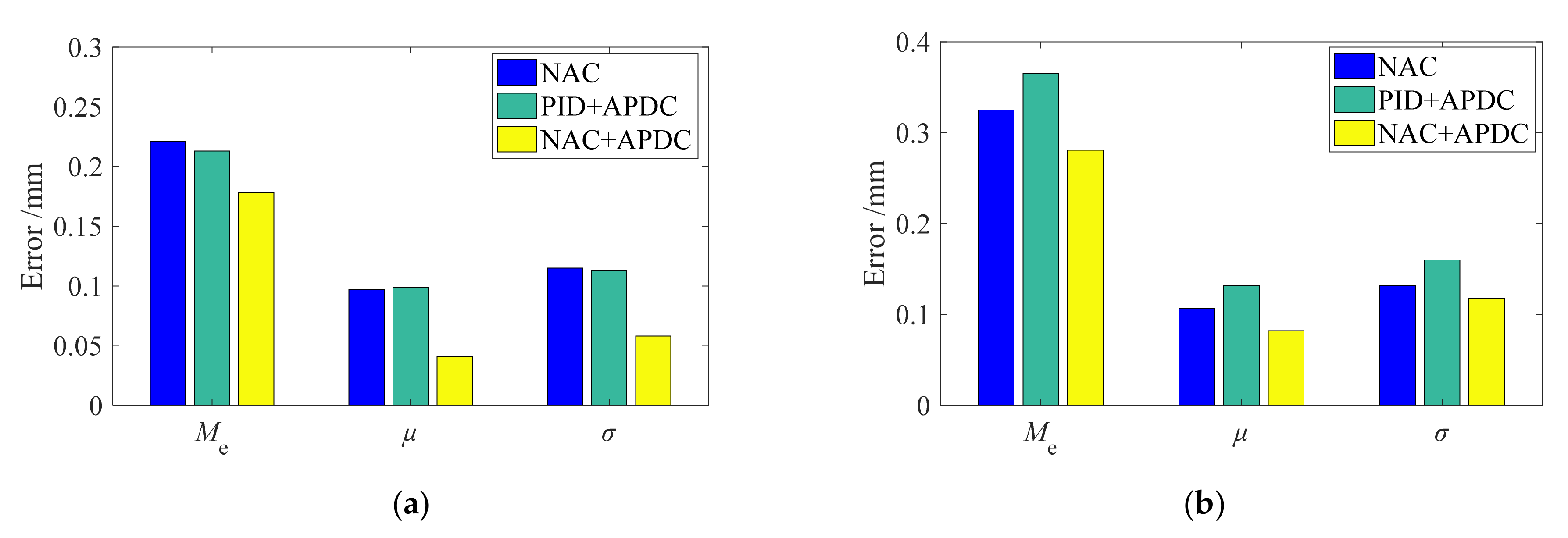
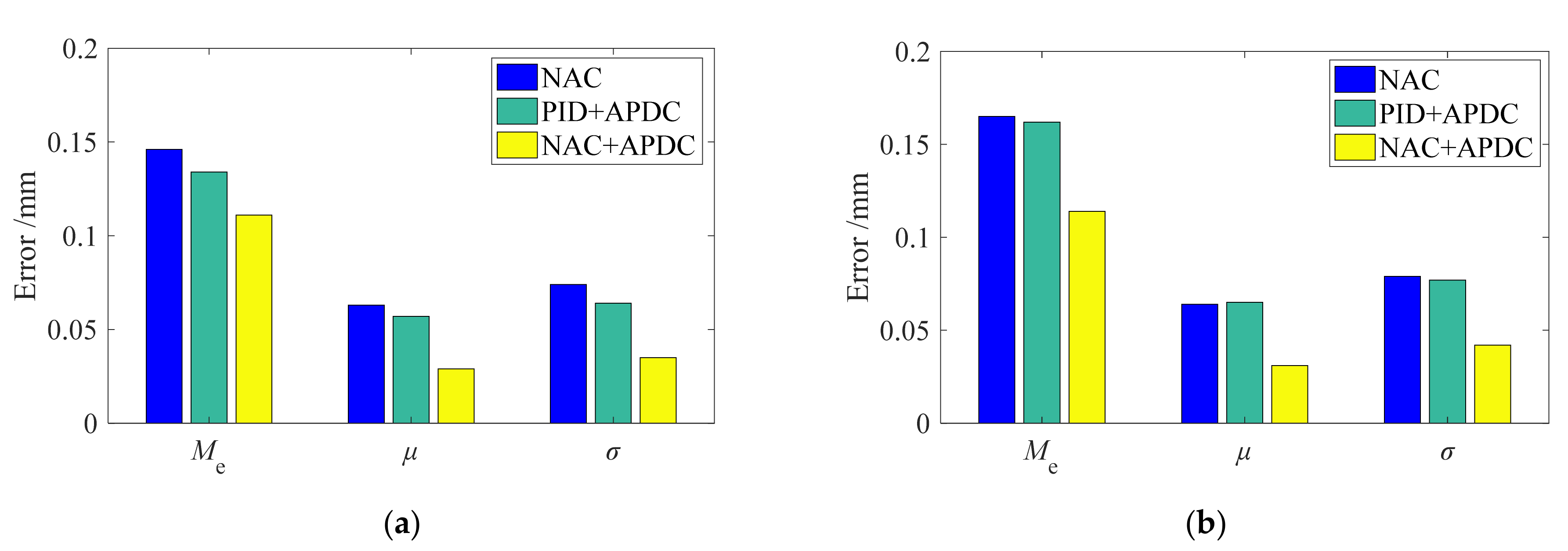
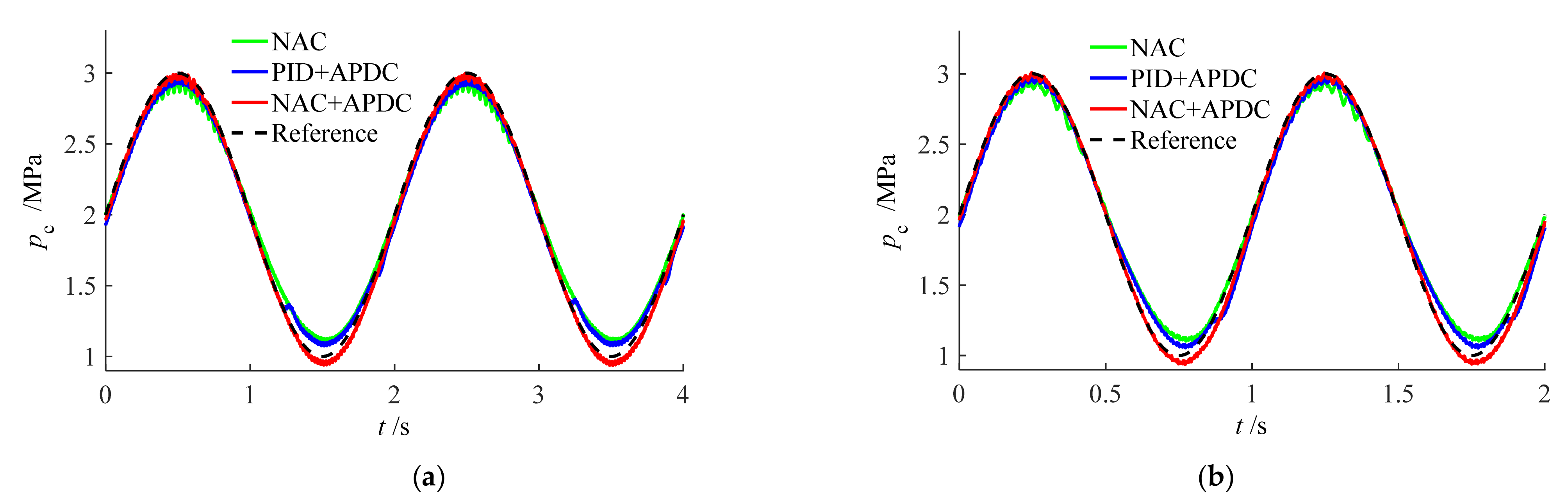
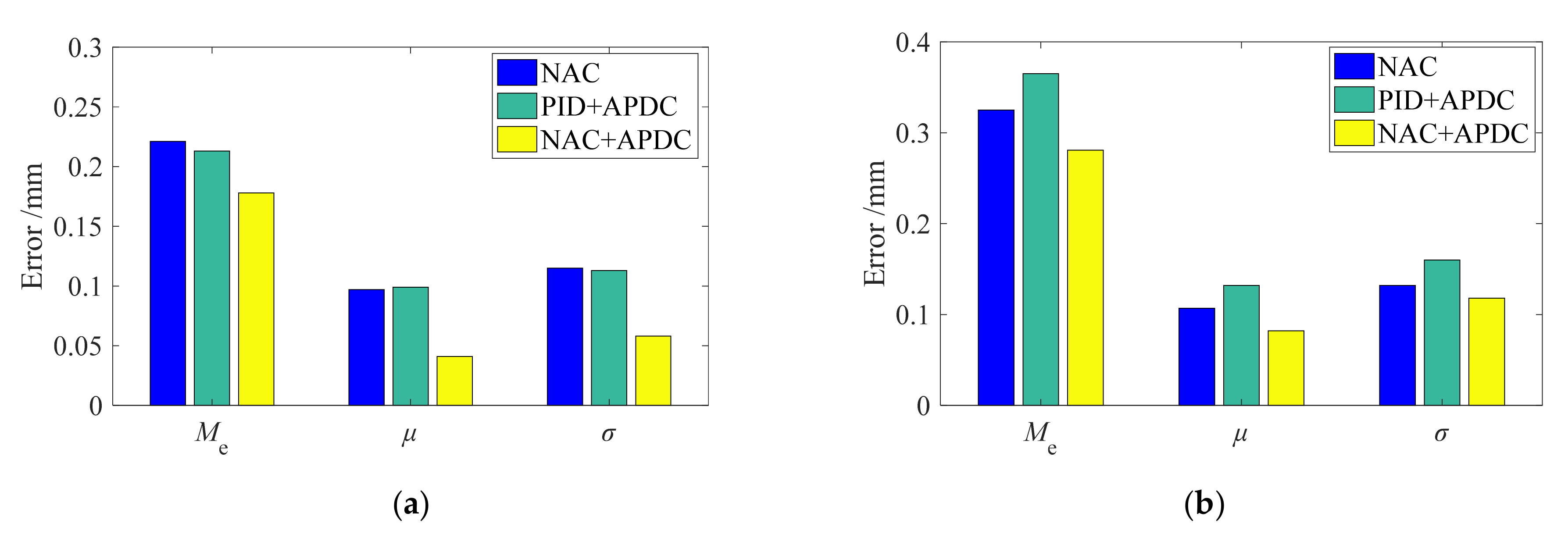
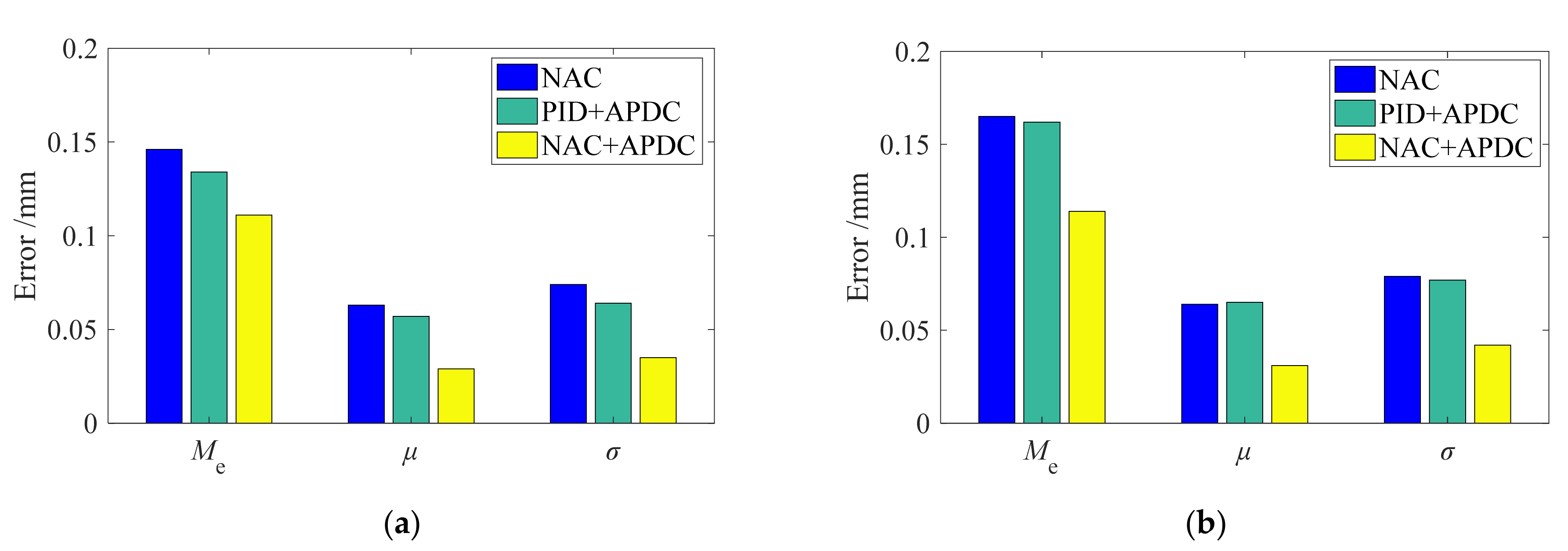
5.2. Tracking Performance of Different Controllers
6. Conclusions
- (1)
- The DPWM scheme was designed to improve the resolution of the net flow rate into the testing chamber in which three variables (two initial duty cycles and one control duty cycle) need to be controlled.
- (2)
- The two initial duty cycles of the differential PWM signals were first designed by APDC which can balance the charging ability and the discharging ability under different working pressure points.
- (3)
- The NAC was proposed to calculate the control duty cycle of the DPWM signal which is used to overcome unmodeled dynamic and parameter uncertainties, such as oil compression and leakage.
- (4)
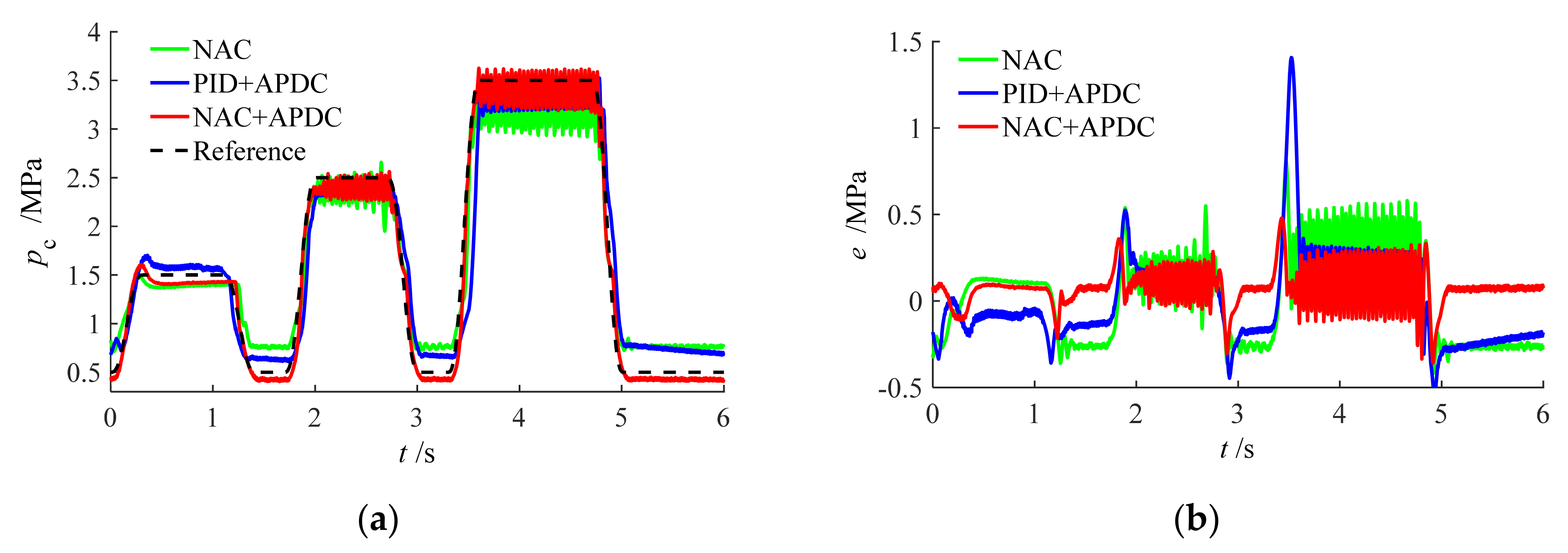
- Extensive comparative experiments demonstrate that, compared to the NAC and PID + APDC controllers, the proposed NAC + APDC controller ensured good tracking performance under different working pressures and tracking frequencies. For example, when tracking pressure signal was 1.5 sin (2π × 0.5) + 2.5, the three tracking indices (maximum error, average error, and error standard deviation) of the proposed NAC + APDC controller were reduced by 68.8%, 65.7% and 65%, respectively, compared to the NAC, while the tracking indexes reduction of the PID + APDC controller were all within 20%.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nesci, A.; De Martin, A.; Jacazio, G.; Sorli, M. Detection and prognosis of propagating faults in flight control actuators for helicopters. Aerospace 2020, 7, 20. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.G.; Wu, Z.Z.; Guo, H.R.; Li, J. Design and simulation study of a certain landing gear loading simulation system. Adv. Mater. Res. 2014, 871, 69–76. [Google Scholar] [CrossRef]
- Huang, C.; Jiao, Z.X.; Shang, Y.X. Antiskid braking control with on/off valves for aircraft applications. J. Aircr. 2013, 50, 1869–1879. [Google Scholar]
- Lewicki, D.; Stevens, M. Testing of Two-Speed Transmission Configurations for Use in Rotorcraft; NASA/TM-2015–218816; National Aeronautics and Space Administration: Washington, DC, USA, 2015.
- Wu, S.; Zhao, X.Y.; Li, C.F.; Jiao, Z.X.; Qu, Y.F. Multi-objective optimization of a hollow plunger type solenoid for high speed on/off valve. IEEE Trans. Ind. Electron. 2018, 65, 3115–3124. [Google Scholar] [CrossRef]
- Linjama, M.; Laamanen, A.; Vilenius, M. Is it time for digital hydraulics. In Proceedings of the The Eighth Scandinavian International Conference on Fluid Power, Tampere, Finland, 7–9 May 2003. [Google Scholar]
- Gao, Q.; Zhu, Y.; Liu, J. Dynamics modelling and control of a novel fuel metering valve actuated by two binary-coded digital valve arrays. Machines 2022, 10, 55. [Google Scholar] [CrossRef]
- Gao, Q.; Zhu, Y.; Wu, C.; Jiang, Y. Development of a novel two-stage proportional valve with a pilot digital flow distribution. Front. Mech. Eng. 2021, 16, 420–434. [Google Scholar] [CrossRef]
- Van, V.R.B.; Bone, G.M. Accurate position control of a pneumatic actuator using on/off solenoid valves. IEEE/ASME Trans. Mechatron. 1997, 2, 195–204. [Google Scholar]
- Long, G.; Lumkes, J.J. Comparative study of position control with 2-way and 3-way on/off electrohydraulic valves. Int. J. Fluid Power 2010, 11, 21–32. [Google Scholar] [CrossRef]
- Adeli, M.R.; Kakahaji, H. Modeling and position sliding mode control of a hydraulic actuators using on/off valve with PWM technique. In Proceedings of the 3rd International Students Conference on Electrodynamics and Mechatronics, Opole, Poland, 6–8 October 2011; IEEE: New York, NY, USA; pp. 59–64. [Google Scholar]
- Hodgson, S.; Le, M.Q.; Tavakoli, M.; Pham, M.T. Improved tracking and switching performance of an electro-pneumatic positioning system. Mechatronics 2012, 22, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Hodgson, S.; Tavakoli, M.; Pham, M.T.; Tavakoli, M. Nonlinear discontinuous dynamics averaging and PWM-based sliding control of solenoid-valve pneumatic actuators. IEEE/ASME Trans. Mechatron. 2014, 20, 876–888. [Google Scholar] [CrossRef] [Green Version]
- Paloniitty, M.; Linjama, M. High-linear digital hydraulic valve control by an equal coded valve system and novel switching schemes. Proc. IMechE Part I J. Syst. Control Eng. 2018, 232, 258–269. [Google Scholar] [CrossRef]
- Gao, Q.; Linjama, M.; Paloniitty, M.; Zhu, Y.C. Investigation on positioning control strategy and switching optimization of an equal coded digital valve system. Proc. IMechE Part I J. Syst. Control Eng. 2020, 234, 959–972. [Google Scholar] [CrossRef]
- Wang, F.; Gu, L.Y.; Chen, Y. A continuously variable hydraulic pressure converter based on high-speed on-off valves. Mechatronics 2011, 21, 1298–1308. [Google Scholar] [CrossRef]
- Wang, F.; Gu, L.Y.; Chen, Y. A hydraulic pressure-boost system based on high-speed on-off valves. IEEE/ASME Trans. Mechatron. 2013, 18, 733–743. [Google Scholar] [CrossRef]
- Zhao, X.; Li, L.; Song, J.; Li, C.F.; Gao, X. Linear control of switching valve in vehicle hydraulic control unit based on sensorless solenoid position estimation. IEEE Trans. Ind. Electron. 2016, 63, 4073–4085. [Google Scholar] [CrossRef]
- Chen, L.; Wang, H.; Cao, D.P. High-Precision Hydraulic Pressure Control Based on Linear Pressure-Drop Modulation in Valve Critical Equilibrium State. IEEE Trans. Ind. Electron. 2017, 64, 7984–7993. [Google Scholar]
- Jiao, Z.X.; Liu, X.C.; Shang, Y.X.; Huang, C. An integrated self-energized brake system for aircrafts based on a switching valve control. Aerosp. Sci. Technol. 2017, 60, 20–30. [Google Scholar] [CrossRef]
- Lin, Z.L.; Zhang, T.H.; Xie, Q. Intelligent real-time pressure tracking system using a novel hybrid control scheme. Trans. Inst. Meas. Control 2018, 40, 3744–3759. [Google Scholar] [CrossRef]
- Yang, G.; Chen, K.; Du, L.L.; Du, J.M.; Li, B.R. Dynamic vacuum pressure tracking control with high-speed on-off valves. Proc. IMechE Part I J. Syst. Control Eng. 2018, 232, 1325–1336. [Google Scholar] [CrossRef]
- Yang, G.; Jiang, P.; Lei, L.; Wu, Y.; Du, J.M.; Li, B.R. Adaptive backstepping control of vacuum servo system using high-speed on-off valves. IEEE Access 2020, 8, 129799–129812. [Google Scholar] [CrossRef]
- Gao, Q.; Zhu, Y.C.; Luo, Z.; Bruno, N. Investigation on adaptive pulse width modulation control for high speed on off valve. J. Mech. Sci. Technol. 2020, 34, 1711–1722. [Google Scholar] [CrossRef]
- Zhong, Q.; Wang, X.L.; Zhou, H.Z.; Xie, G.; Hong, H.C.; Yan, Y.B.; Chen, B.; Yang, H.Y. Investigation into the adjustable dynamic characteristic of the high-speed on/off valve with an advanced pulsewidth modulation control algorithm. IEEE/ASME Trans. Mechatron. 2021, 1–14. [Google Scholar] [CrossRef]
- Deng, W.X.; Yao, J.Y. Asymptotic tracking control of mechanical servosystems with mismatched uncertainties. IEEE/ASME Trans. Mechatron. 2021, 26, 2204–2214. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Q. Nonlinear Adaptive Control with Asymmetric Pressure Difference Compensation of a Hydraulic Pressure Servo System Using Two High Speed On/Off Valves. Machines 2022, 10, 66. https://doi.org/10.3390/machines10010066
Gao Q. Nonlinear Adaptive Control with Asymmetric Pressure Difference Compensation of a Hydraulic Pressure Servo System Using Two High Speed On/Off Valves. Machines. 2022; 10(1):66. https://doi.org/10.3390/machines10010066
Chicago/Turabian StyleGao, Qiang. 2022. "Nonlinear Adaptive Control with Asymmetric Pressure Difference Compensation of a Hydraulic Pressure Servo System Using Two High Speed On/Off Valves" Machines 10, no. 1: 66. https://doi.org/10.3390/machines10010066
APA StyleGao, Q. (2022). Nonlinear Adaptive Control with Asymmetric Pressure Difference Compensation of a Hydraulic Pressure Servo System Using Two High Speed On/Off Valves. Machines, 10(1), 66. https://doi.org/10.3390/machines10010066