1. Introduction
We are interested in the numerical solution of the Cauchy problem, that is the first order Ordinary Differential Equation (ODE),
associated with the initial condition:
where
is a
function on its domain and
is assigned. Note that there is no loss of generality in assuming that the equation is autonomous. In this context, here, we focus on one-step Hermite–Obreshkov (HO) methods ([
1], p. 277). Unlike Runge–Kutta schemes, a high order of convergence is obtained with HO methods without adding stages. Clearly, there is a price for this because total derivatives of the
function are involved in the difference equation defining the method, and thus, a suitable smoothness requirement for
is necessary. Multiderivative methods have been considered often in the past for the numerical treatment of ODEs, for example also in the context of boundary value methods [
2], and in the last years, there has been a renewed interest in this topic, also considering its application to the numerical solution of differential algebraic equations; see, e.g., [
3,
4,
5,
6,
7,
8]. Here, we consider the numerical solution of Hamiltonian problems which in canonical form can be written as follows:
with:
where
and
are the generalized coordinates and momenta,
is the Hamiltonian function and
stands for the identity matrix of dimension
ℓ. Note that the flow
associated with the dynamical system (
3) is symplectic; this means that its Jacobian satisfies:
A one-step numerical method
with stepsize
h is symplectic if the discrete flow
satisfies:
Two numerical methods
are conjugate to each other if there exists a global change of coordinates
, such that:
with
uniformly for
varying in a compact set and ∘ denoting a composition operator [
9]. A method which is conjugate to a symplectic method is said to be conjugate symplectic, this is a less strong requirement than symplecticity, which allows the numerical solution to have the same long-time behavior of a symplectic method. Observe that the conjugate symplecticity here refers to a property of the discrete flow of the two numerical methods; this should be not confused with the group of conjugate symplectic matrices, the set of matrices
that satisfy
, where
H means Hermitian conjugate [
10].
A more relaxed property, shared by a wider class of numerical schemes, is a generalization of the conjugate-symplecticity property, introduced in [
11]. A method
of order
p is conjugate-symplectic up to order
, with
, if a global change of coordinates
exists such that
, with the map
satisfying
A consequence of property (
7) is that the method
nearly conserves all quadratic first integrals and the Hamiltonian function over time intervals of length
(see [
11]).
Recently, the class of Euler–Maclaurin methods for the solution of Hamiltonian problems has been analyzed in [
12,
13] where the conjugate symplecticity up to order
of the
p-th order methods was proven.
In this paper, we consider the symmetric one-step HO methods, which were analyzed in [
14,
15] in the context of spline applications. We call them BSHO methods, since they are connected to B-Splines, as we will show. BSHO methods have a formulation similar to that of the Euler–Maclaurin formulas, and the order two and four schemes of the two families are the same. As a new result, we prove that BSHO methods are conjugate symplectic schemes up to order
, as is the case for the Euler–Maclaurin methods [
12,
13], and so, both families are suited to the context of geometric integration.
BSHO methods are also strictly related to BS methods [
16,
17], which are a class of linear multistep methods also based on B-splines suited for addressing boundary value problems formulated as first order differential problems. Note that also BS methods were firstly studied in [
14,
15], but at that time, they were discarded in favor of BSHO methods since; when used as initial value methods, they are not convergent. In [
16,
17], the same schemes have been studied as boundary value methods, and they have been recovered in particular in connection with boundary value problems. As for the BSHO methods, the discrete solution generated by a BS method can be easily extended to a continuous spline collocating the differential problem at the mesh points [
18]. The idea now is to rely on B-splines with multiple inner knots in order to derive one-step HO schemes. The inner knot multiplicity is strictly connected to the number of derivatives of
involved in the difference equations defining the method and consequently with the order of the method. The efficient approach introduced in [
18] dealing with BS methods for the computation of the collocating spline extension is here extended to BSHO methods, working with multiple knots. Note that we adopt a reversed point of view with respect to [
14,
15] because we assume to have already available the numerical solution generated by the BSHO methods and to be interested in an efficient procedure for obtaining the B-spline coefficients of the associated spline.
The paper is organized as follows. In
Section 2, one-step symmetric HO methods are introduced, focusing in particular on BSHO methods.
Section 3 is devoted to proving that BSHO methods are conjugate symplectic methods up to order
. Then,
Section 4 first shows how these methods can be revisited in the spline collocation context. Successively, an efficient procedure is introduced to compute the B-spline form of the collocating spline extension associated with the numerical solution produced by the
R-th BSHO, and it is shown that its convergence order is equal to that of the numerical solution.
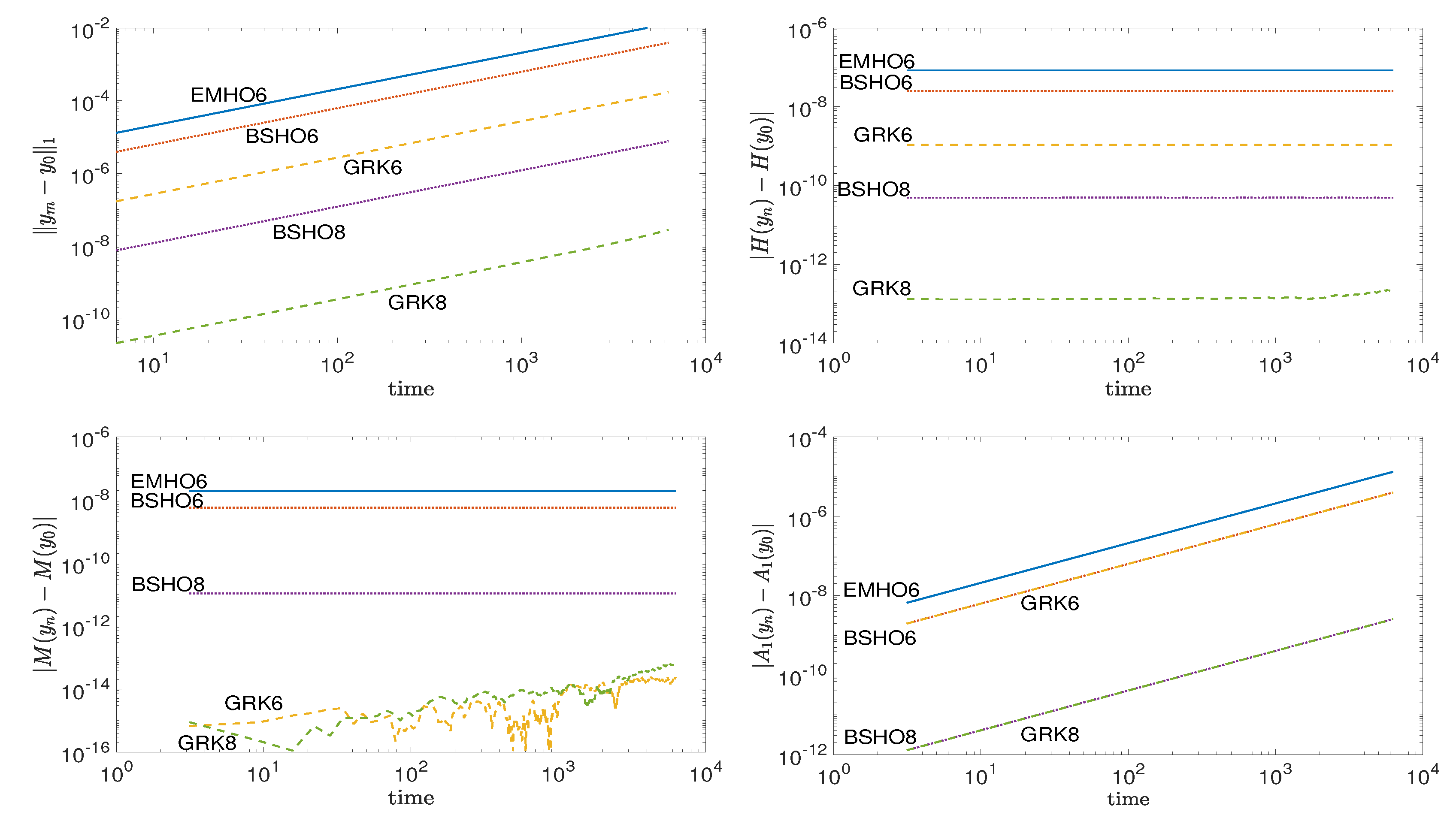
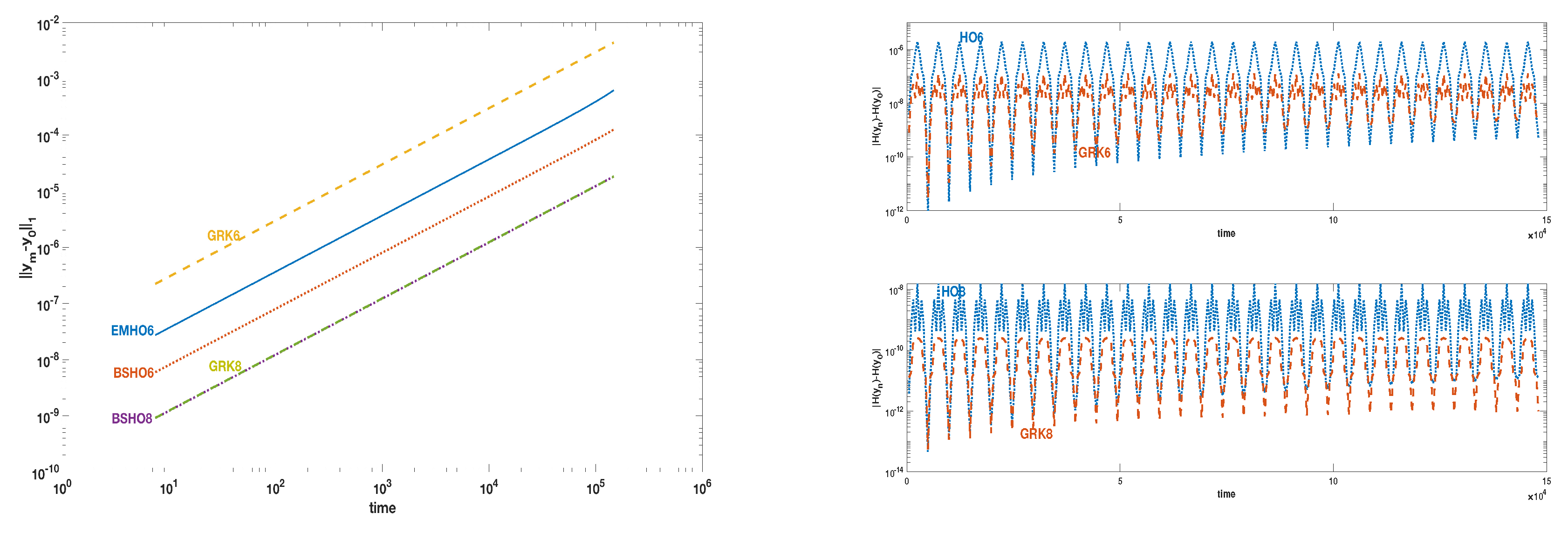
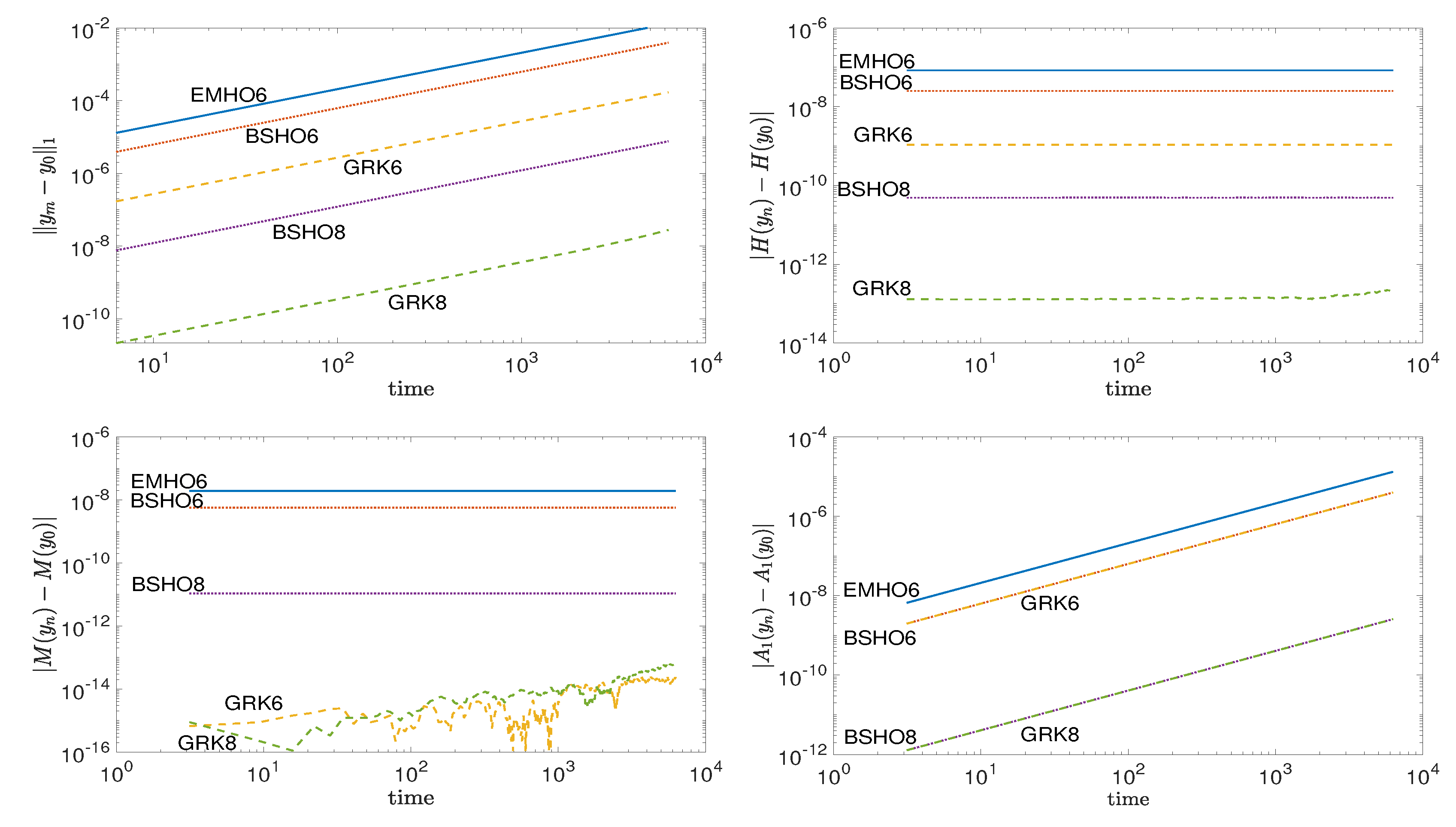
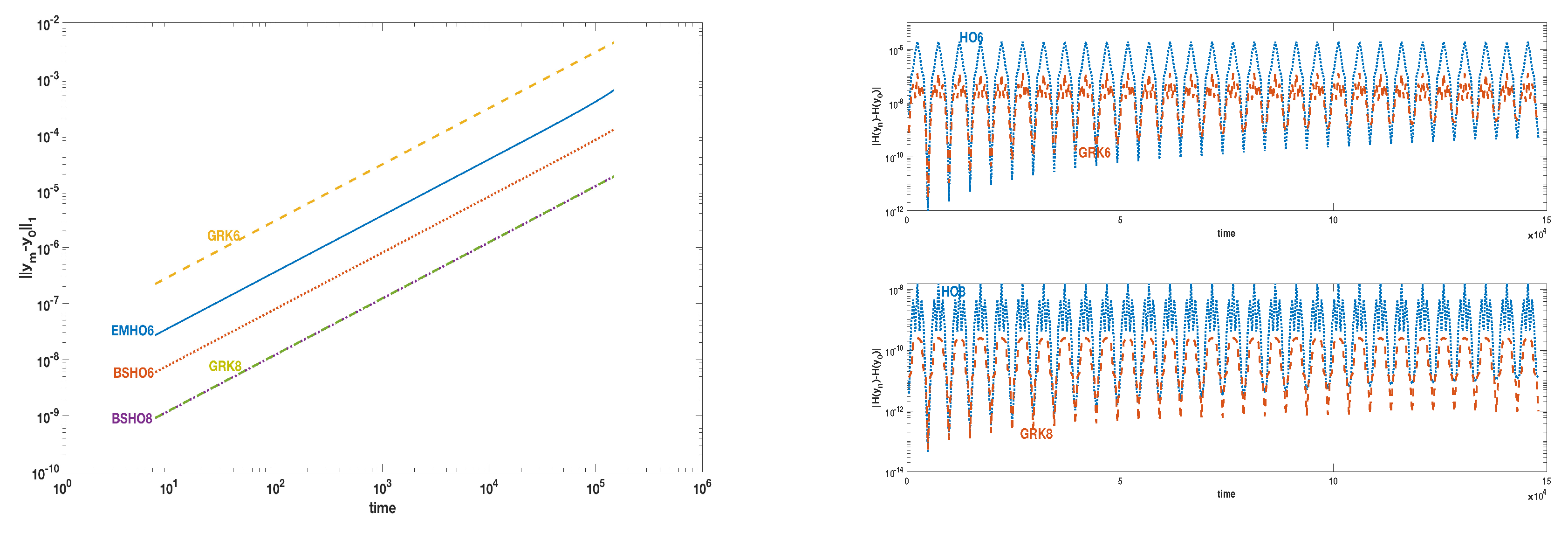
Section 6 presents some numerical results related to Hamiltonian problems, comparing them with those generated by Euler–Maclaurin and Gauss–Runge–Kutta schemes of the same order.
2. One-Step Symmetric Hermite–Obreshkov Methods
Let
be an assigned partition of the integration interval
, and let us denote by
an approximation of
. Any one-step symmetric Hermite–Obreshkov (HO) method can be written as follows, clearly setting
where
and where
, for
denotes the total
-th derivative of
with respect to
t computed at
,
Note that
, and on the basis of (
1), the analytical computation of the
j-th derivative
involves a tensor of order
j. For example,
(where
becomes the Jacobian
matrix of
with respect to
when
). As a consequence, it is
We observe that the definition in (14) implies that only
is unknown in (
8), which in general is a nonlinear vector equation in
with respect to it.
For example, the one-step Euler–Maclaurin [
1] formulas of order
with
(where the
denote the Bernoulli numbers, which are reported in Table 2) belong to this class of methods. These methods will be referred to in the following with the label EMHO (Euler–Maclaurin Hermite–Obreshkov).
Here, we consider another class of symmetric HO methods that can be obtained by defining as follows the polynomial
appearing in ([
1], Lemma 13.3), the statement of which is reported in Lemma 1.
Lemma 1. Let R be any positive integer and be a polynomial of exact degree . Then, the following one-step linear difference equation, defines a multiderivative method of order . Referring to the methods obtainable by Lemma 1, if in particular the polynomial
is defined as in (
11), then we obtain the class of methods in which we are interested here. They can be written as in (
8) with,
which are reported in
Table 1, for
. In particular, for
and
, we obtain the trapezoidal rule and the Euler–Maclaurin method of order four, respectively.
These methods were originally introduced in the spline collocation context, dealing in particular with splines with multiple knots [
14,
15], as we will show in
Section 4. We call them BSHO methods since we will show that they can be obtained dealing in particular with the standard B-spline basis. The stability function of the
R-th one-step symmetric BSHO method is the rational function corresponding to the
-Padé approximation of the exponential function, as is that of the same order Runge–Kutta–Gauss method ([
19], p. 72). It has been proven that methods with this stability function are A-stable ([
19], Theorem 4.12). For the proof of the statement of the following corollary, which will be useful in the sequel, we refer to [
15],
Corollary 1. Let us assume that where such that with Then, there exists a positive constant such that if and denotes the related numerical solution produced by the R-th one-step symmetric BSHO method in (8)–(12), it is: 3. Conjugate Symplecticity of the Symmetric One-Step BSHO Methods
Following the lines of the proof given in [
13], in this section, we prove that one-step symmetric BSHO methods are conjugate symplectic schemes up to order
. The following lemma, proved in [
20], is the starting point of the proof, and it makes use of the
B-series integrator concept. On this concern, referring to [
9] for the details, here, we just recall that a
B-series integrator is a numerical method that can be expressed as a formal
B-series, that is it has a power series in the time step in which each term is a sum of elementary differentials of the vector field and where the number of terms is allowed to be infinite.
Lemma 2. Assume that Problem (1) admits a quadratic first integral (with S denoting a constant symmetric matrix) and that it is solved by a B-series integrator . Then, the following properties, where all formulas have to be interpreted in the sense of formal series, are equivalent: - (a)
has a modified first integral of the form where each is a differential functional;
- (b)
is conjugate to a symplectic B-series integrator.
We observe that Lemma 2 is used in [
21] to prove the conjugate symplecticity of symmetric linear multistep methods. Following the lines of the proof given in [
13], we can actually prove that the
R-th one-step symmetric BSHO method is conjugate symplectic up to order
. With similar arguments of [
13] we prove the following theorem, showing that the map
associated with the BSHO method is such that
, where
is a suitable conjugate symplectic B-series integrator.
Theorem 1. The map associated with the one-step method (8) admits a B-series expansion and is conjugate to a symplectic B-series integrator up to order . Proof. The existence of a
B-series expansion for
is directly deduced from [
22], where a
B-series representation of a generic multi-derivative Runge-Kutta method has been obtained. By defining the two characteristic polynomials of the trapezoidal rule:
and the shift operator
the
R-th method described in (
8) reads,
Observe that
, for
denotes the
-th Lie derivative of
computed at
,
where
is the identity operator and
is defined as the
k-th total derivative of
computed at
where for the computation of the total derivative it is assumed that
satisfies the differential equation in (
1). Note that we use the subscript to define the Lie operator to avoid confusion with the same order classical derivative operator in the following denoted as
With this clarification on the definition of
we now consider a function
, a stepsize
h and the shift operator
, and we look for a continuous function
that satisfies (
13) in the sense of formal series (a series where the number of terms is allowed to be infinite), using the relation
where
is the classical derivative operator,
By multiplying both sides of the previous equation by
, we obtain:
Now, since Bernoulli numbers define the Taylor expansion of the function
and
and
for the other odd
we have:
Thus, we can write (
15) as
Adding and subtracting terms involving the classical derivative operator
, we get
that we recast as
Since
, due to the regularity conditions on the function
, we see that
and hence the solution
of (
16) is
-close to the solution of the following initial value problem
with:
that has been derived from (
16) by neglecting the sums containing the derivatives
. Observe that
for
since the method is of order
(see [
9], Theorem 3.1, page 340). We may interpret (
17) as the modified equation of a one-step method
, where
is evidently the time-
h flow associated with (
17). Expanding the solution of (
17) in Taylor series, we get the modified initial value differential equation associated with the numerical scheme by coupling (
17) with the initial condition
. Thus,
is a B-series integrators. The proof of the conjugated symplecticity of
follows exactly the same steps of the analogous proof in Theorem 1 of [
13]. Since
and
is conjugate-symplectic, the result follows using the same global change of coordinates
associated to
. ☐
In
Table 2, we report the coefficients
for
and the corresponding Bernoulli numbers. We can observe that the truncation error in the modified initial value problem is smaller than the one of the EMHO methods of the same order, which is equal to
(see [
13]). The conjugate symplecticity up to order
property of a numerical scheme makes it suitable for the solution of Hamiltonian problems. A well-known pair of conjugate symplectic methods is composed by the trapezoidal and midpoint rules. Observe that the trapezoidal rule belongs to both the classes BSHO and EMHO of multiderivative methods, and its characteristic polynomial plays an important role in the proof of Theorem 1.
4. The Spline Extension
A (vector) Hermite polynomial of degree
interpolating both
and
respectively at
and
together with assigned derivatives
can be computed using the Newton interpolation formulas with multiple nodes. On the other hand, in his Ph.D. thesis [
15], Loscalzo proved that a polynomial of degree
verifying the same conditions exists if and only if (
8) is fulfilled with the
coefficients defined as in (
12). Note that, since the polynomial of degree
fulfilling these conditions is always unique and its principal coefficient is given by the generalized divided difference
of order
associated with the given
R-order Hermite data, the
n-th condition in (
8) holds iff this coefficient vanishes. If all the conditions in (
8) are fulfilled, it is possible to define a piecewise polynomial, the restriction to
of which coincides with this polynomial, and it is clearly a
spline of degree
with breakpoints at the mesh points. Now, when the definition given in (14) is used together with the assumption
the conditions in (
8) become a multiderivative one-step scheme for the numerical solution of (
1). Thus, the numerical solution
it produces and the associated derivative values defined as in (14) can be associated with the above-mentioned
degree spline extension. Such a spline collocates the differential equation at the mesh points with multiplicity
that is it verifies the given differential equation and also the equations
at the mesh points. This piecewise representation of the spline is that adopted in [
15]. Here, we are interested in deriving its more compact B-spline representation. Besides being more compact, this also allows us to clarify the connection between BSHO and BS methods previously introduced in [
16,
17,
18]. For this aim, let us introduce some necessary notation. Let
be the space of
-degree splines with breakpoints at
where
Since we relate to the B-spline basis, we need to introduce the associated extended knot vector:
where:
which means that all the inner breakpoints have multiplicity
R in
and both
and
have multiplicity
The associated B-spline basis is denoted as
and the dimension of
as
with
The mentioned result proven by Loscalzo is equivalent to saying that, if the
coefficients are defined as in (
12), any
spline of degree
with breakpoints at the mesh points fulfills the relation in (
8), where
denotes the
j-th spline derivative at
In turn, this is equivalent to saying that such a relation holds for any element of the B-spline basis of
Thus, setting
and
considering the local support of the B-spline basis, we have that
, where the punctuation mark “;” means vertical catenation (to make a column-vector), can be also characterized as the unique solution of the following linear system,
where
and:
with
defined as,
where
denotes the
j-th derivative of
Note that the last equation in (
19),
is just a normalization condition.
In order to prove the non-singularity of the matrix we need to introduce the following definition,
Definition 1. Given a non-decreasing set of abscissas we say that a function agrees with another function at Θ if where denotes the multiplicity of in
Then, we can formulate the following proposition,
Proposition 1. The matrix defined in (20) and associated with the B-spline basis of is nonsingular. Proof. Observe that the restriction to
of the splines in
generates
since there are no inner knots in
Then, restricting to
can be also generated by the B-splines of
not vanishing in
that is from
Since the polynomial in
agreeing with a given function in:
is unique, it follows that also the corresponding
matrix collocating the spline basis active in
is nonsingular. Such a matrix is the principal submatrix of
of order
Thus now, considering that the restriction to
of any function in
is a polynomial of degree
we prove by reductio ad absurdum that the last row of
cannot be a linear combination of the other rows. In fact, in the opposite case, there would exist a polynomial
P of degree
such that
and
Considering the specific interpolation conditions, this
P does not fulfill the
n-th condition in (
8). This is absurd, since Loscalzo [
15] has proven that such a condition is equivalent to requiring degree reduction for the unique polynomial of degree less than or equal to
, fulfilling
Hermite conditions at both
and
☐
Note that this different form for defining the coefficient of the
R-th BSHO scheme is analogous to that adopted in [
17] for defining a BS method on a general partition. However, in this case, the coefficients of the scheme do not depend on the mesh distribution, so there is no need to determine them solving the above linear system. On the other hand, having proven that the matrix
is nonsingular will be useful in the following for determining the B-spline form of the associated spline extension.
Thus, let us now see how the B-spline coefficients of the spline in
associated with the numerical solution generated by the
R-th BSHO can be efficiently obtained, considering that the following conditions have to be imposed,
Now, we are interested in deriving the B-spline coefficients
of
Relying on the representation in (
23), all the conditions in (
22) can be re-written in the following compact matrix form,
where
, with
is the identity matrix of size
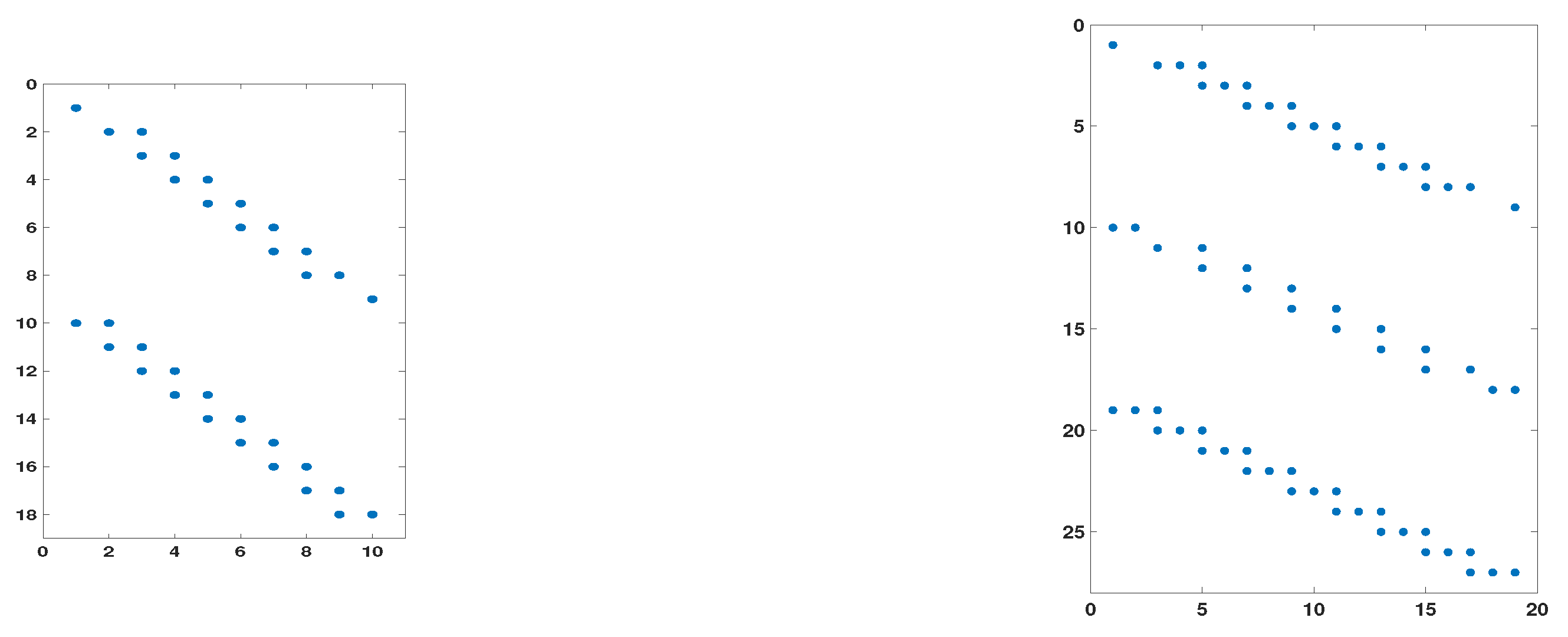
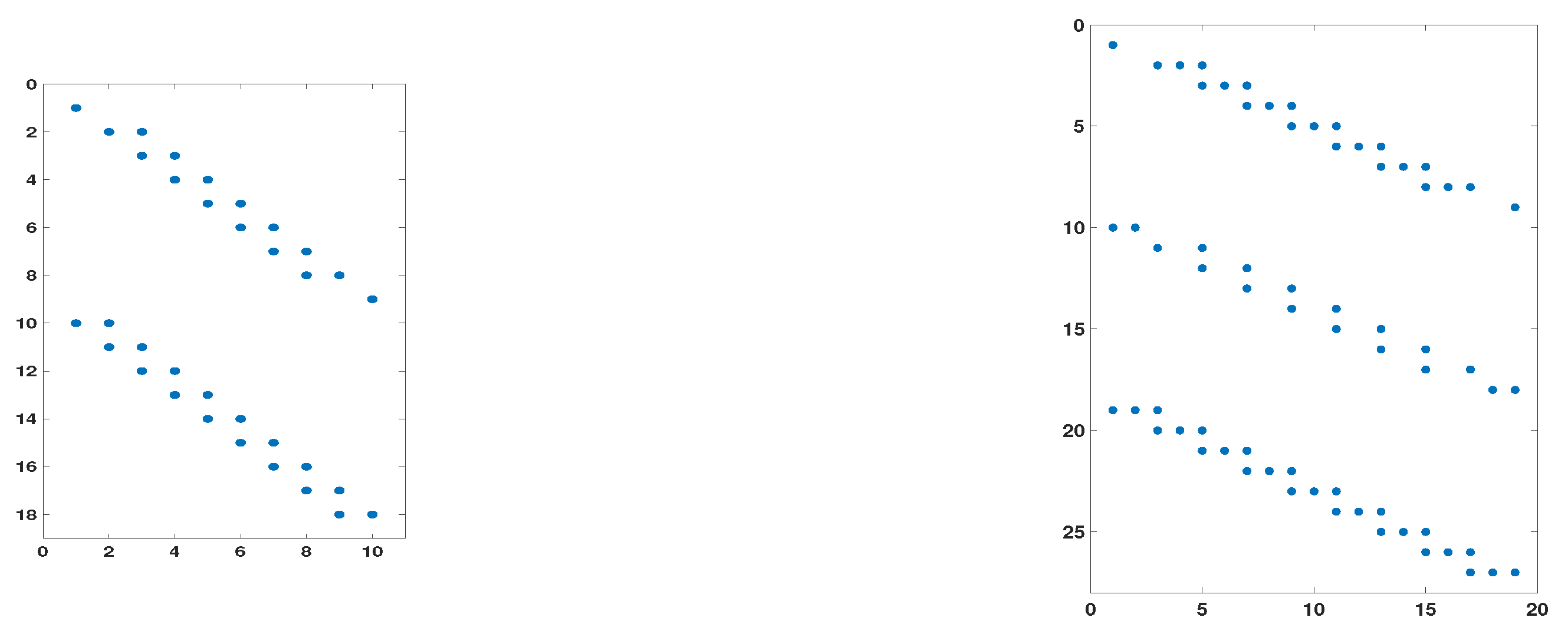
D is the dimension of the spline space previously introduced and where:
with each
being a
-banded matrix of size
(see
Figure 1) with entries defined as follows:
The following theorem related to the rectangular linear system in (
24) ensures that the collocating spline
is well defined.
Theorem 2. The rectangular linear system in (24) has always a unique solution, if the entries of the vector on its right-hand side satisfy the conditions in (8) with the β coefficients given in (12). Proof. The proof is analogous to that in [
18] (Theorem 1), and it is omitted. ☐
We now move to introduce the strategy adopted for an efficient computation of the B-spline coefficients of
4.1. Efficient Spline Computation
Concerning the computation of the spline coefficient vectors:
the unique solution of (
24) can be computed with several different strategies, which can have very different computational costs and can produce results with different accuracy when implemented in finite arithmetic. Here, we follow the local strategy used in [
18]. Taking into account the banded structure of
, we can verify that (
24) implies the following relations,
where
and:
As a consequence, we can also write that,
where
Now, for all integers
we can define other
auxiliary vectors
defined as the solution of the following linear system,
where
is the
r-th unit vector in
(that is the auxiliary vectors define the
r-th column of the inverse of
). Then, we can write,
From this formula, considering (
27), we can conclude that:
Thus, solving all the systems (
28) for
with:
all the spline coefficients are obtained. Note that, with this approach, we solve
D auxiliary systems, the size of which does not depend on
N, using only
N different coefficient matrices. Furthermore, only the information at
and
is necessary to compute
Thus, the spline can be dynamically computed at the same time the numerical solution is advanced at a new time value. This is clearly of interest for a dynamical adaptation of the stepsize.
In the following subsection, relying on its B-spline representation, we prove that the convergence order of
to
is equal to that of the numerical solution. This result was already available in [
15] (see Theorem 4.2 in the reference), but proven with different longer arguments.
4.2. Spline Convergence
Let us assume the following quasi-uniformity requirement for the mesh,
where
and
are positive constants not depending on
with
and
Note that this requirement is a standard assumption in the refinement strategies of numerical methods for ODEs. We first prove the following result, that will be useful in the sequel.
Proposition 2. If and so in particular if is a polynomial of degree at most then:where and the spline extension coincides with Proof. The result follows by considering that the divided difference vanishes and, as a consequence, the local truncation error of the methods is null. ☐
Then, we can prove the following theorem (where for notational simplicity, we restrict to
), the statement of which is analogous to that on the convergence of the spline extension associated with BS methods [
18]. In the proof of the theorem, we relate to the quasi-interpolation approach for function approximation, the peculiarity of which consists of being a local approach. For example, in the spline context considered here, this means that only a local subset of a given discrete dataset is required to compute a B-spline coefficient of the approximant; refer to [
23] for the details.
Theorem 3. Let us assume that the assumptions on f done in Corollary 1 hold and that (30) holds. Then, the spline extension approximates the solution y of (1) with an error of order where . Proof. Let
denote the spline belonging to
obtained by quasi-interpolating
y with one of the rules introduced in Formula (5.1) in [
23] by point evaluation functionals. From [
23] (Theorem 5.2), under the quasi-uniformity assumption on the mesh distribution, we can derive that such a spline approximates
y with maximal approximation order also with respect to all the derivatives, that is,
where
K is a constant depending only on
and
On the other hand, by using the triangular inequality, we can state that:
Thus, we need to consider the first term on the right-hand side of this inequality. On this concern, because of the partition of unity property of the B-splines, we can write:
where
and
Now, for any function
we can define the following linear functionals,
where:
and the vector
has been defined in the previous section. Considering from Proposition 2 that
, as well as any other spline belonging to
can be written as follows,
from (
31), we can deduce that:
Now, the vector
is defined in (
28) as the
r-th column of the inverse of the matrix
. On the other hand, the entries of such nonsingular matrix do not depend on
h, but because of the locality of the B-spline basis and of the
R-th multiplicity of the inner knots, only on the ratios
, which are uniformly bounded from below and from above because of (
30). Thus, there exists a constant
C depending on
and
R such that
which implies that the same is true for any one of the mentioned coefficient vectors. From the latter, we deduce that for all indices, we find:
On the other hand, taking into account the result reported in Corollary 1 besides (
31), we can easily derive that
, which then implies that
☐
5. Approximation of the Derivatives
The computation of the derivative from the corresponding is quite expensive, and thus, usually, methods not requiring derivative values are preferred. Therefore, as well as for any other multiderivative method, it is of interest to associate with BSHO methods an efficient way to compute the derivative values at the mesh points. We are exploiting a number of possibilities, such as:
using generic symbolic tools, if the function is known in closed form;
using a tool of automatic differentiation, like ADiGator, a MATLAB Automatic Differentiation Tool [
24];
using the
Infinity Computer Arithmetic, if the function
is known as a black box [
6,
7,
13];
approximating it with, for example, finite differences.
As shown in the remainder of this section, when approximate derivatives are used, we obtain a different numerical solution, since the numerical scheme for its identification changes. In this case, the final formulation of the scheme is that of a standard linear multistep method, being still derived from (
8) with coefficients in (
12), but by replacing derivatives of order higher than one with their approximations. In this section, we just show the relation of these methods with a class of Boundary Value Methods (BVMs), the Extended Trapezoidal Rules (ETRs), linear multistep methods used with boundary conditions [
25]. Similar relations have been found in [
26] with HO and the equivalent class of the super-implicit methods, which require the knowledge of functions not only at past, but also at future time steps. The ETRs can be derived from BSHO when the derivatives are approximated by finite differences. Let us consider the order four method with
. In this case, the first derivative of
could be approximated using central differences:
the numerical scheme (
8), denoting
and
, is:
after the approximation becomes:
rearranging, we recover the ETR of order four:
With similar arguments for the method of order six,
, by approximating the derivatives with the order four finite differences:
and:
and rearranging, we obtain the sixth order ETR method:
This relation allows us to derive a continuous extension of the ETR schemes using the continuous extension of the BSHO method, just substituting the derivatives by the corresponding approximations. Naturally, a change of the stepsize will now change the coefficients of the linear multistep schemes. Observe that BVMs have been efficiently used for the solution of boundary value problems in [
27], and the BS methods are also in this class [
16].
It has been proven in [
21] that symmetric linear multistep methods are conjugate symplectic schemes. Naturally, in the context of linear multistep methods used with only initial conditions, this property refers only to the trapezoidal method, but when we solve boundary value problems, the correct use of a linear multistep formula is with boundary conditions; this makes the corresponding formulas stable, with a region of stability equal to the left half plane of
(see [
25]). The conjugate symplecticity of the methods is the reason for their good behavior shown in [
28,
29] when used in block form and with a sufficiently large block for the solution of conservative problems.
Remark 1. We recall that, even when approximated derivatives are used, the numerical solution admits a -degree spline extension verifying all the conditions in (24), where all the appearing on the right-hand side have to be replaced with the adopted approximations. The exact solution of the rectangular system in (24) is still possible, since (8) with coefficients in (12) is still verified by the numerical solution by its derivatives and by the approximations of the higher order derivatives. The only difference in this case is that the continuous spline extension collocates at the breakpoints of just the given first order differential equation. 


{kind=link}
{kind=link}
{kind=link}