
Response Analysis and Vibration Suppression of Fractional Viscoelastic Shape Memory Alloy Spring Oscillator Under Harmonic Excitation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Fractional SDOF Shape Memory Alloy Model
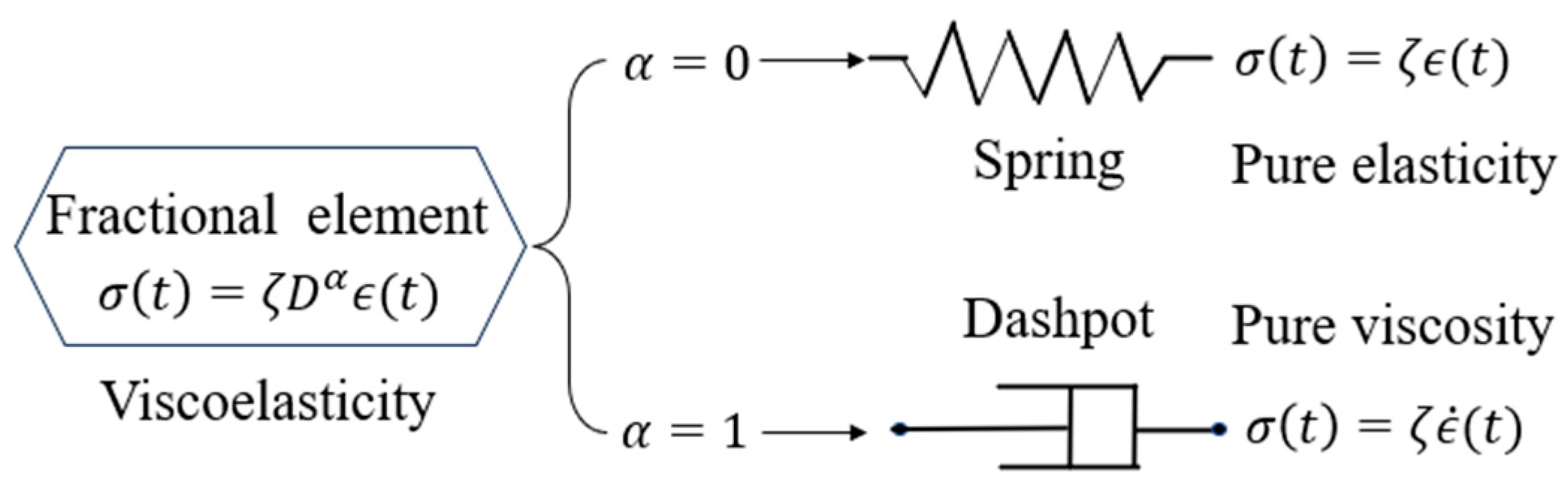
2.1. Preliminaries
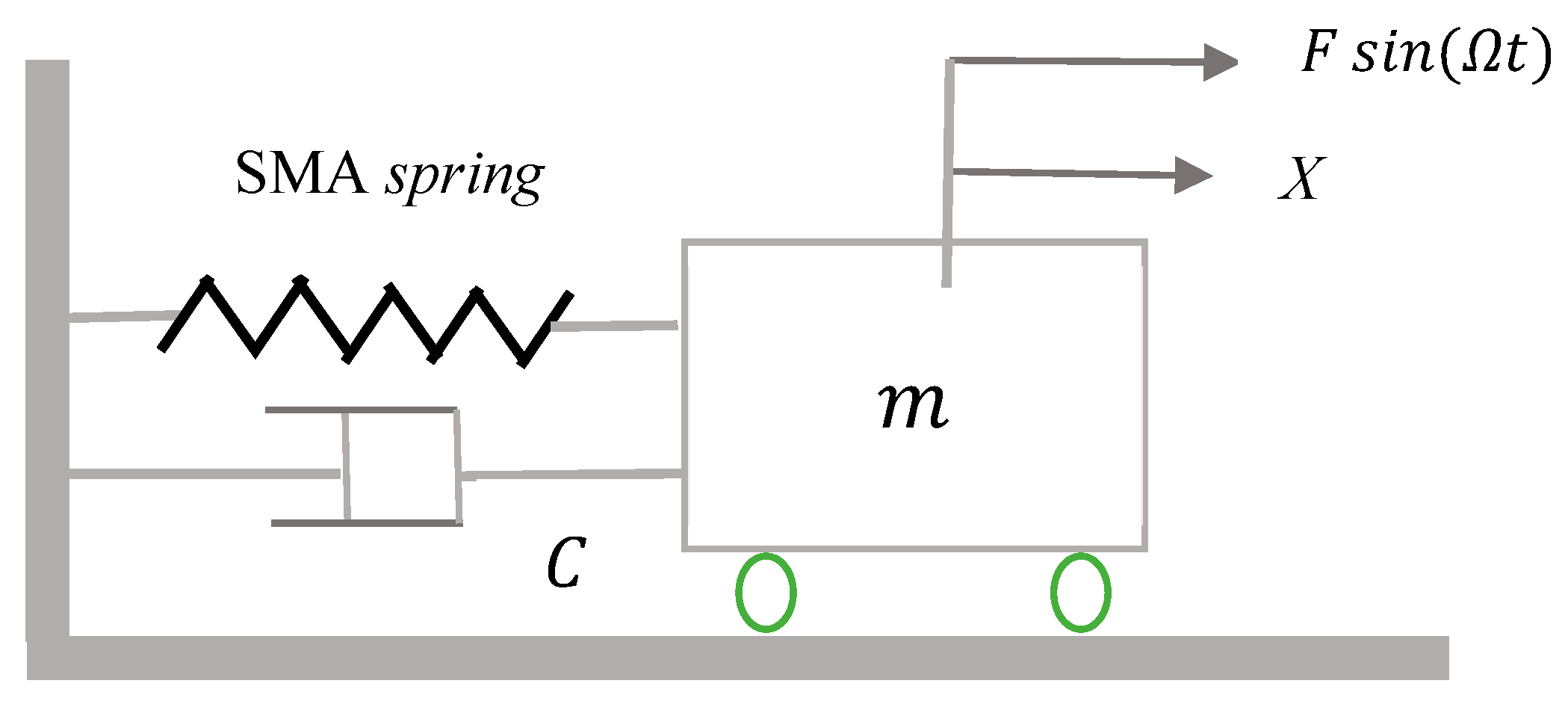
2.2. Model Description
3. Amplitude–Frequency Relation
3.1. Theoretical Analysis via the Averaging Method
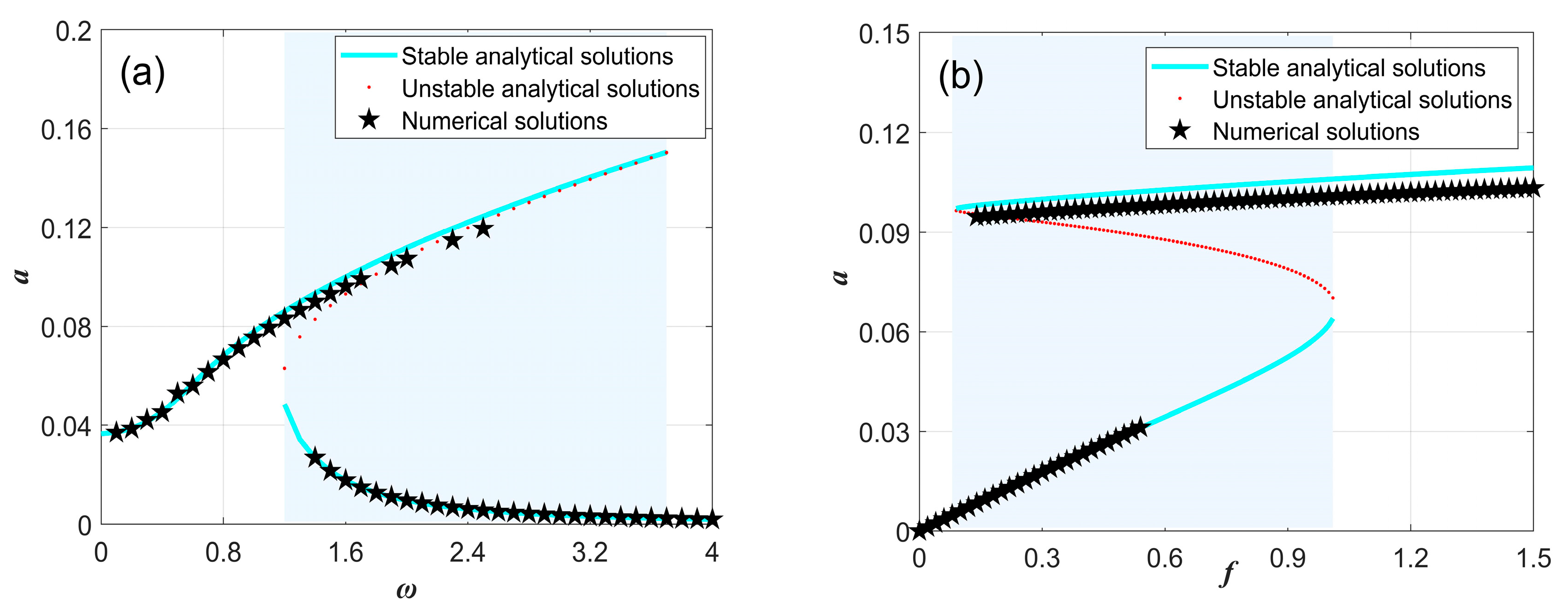
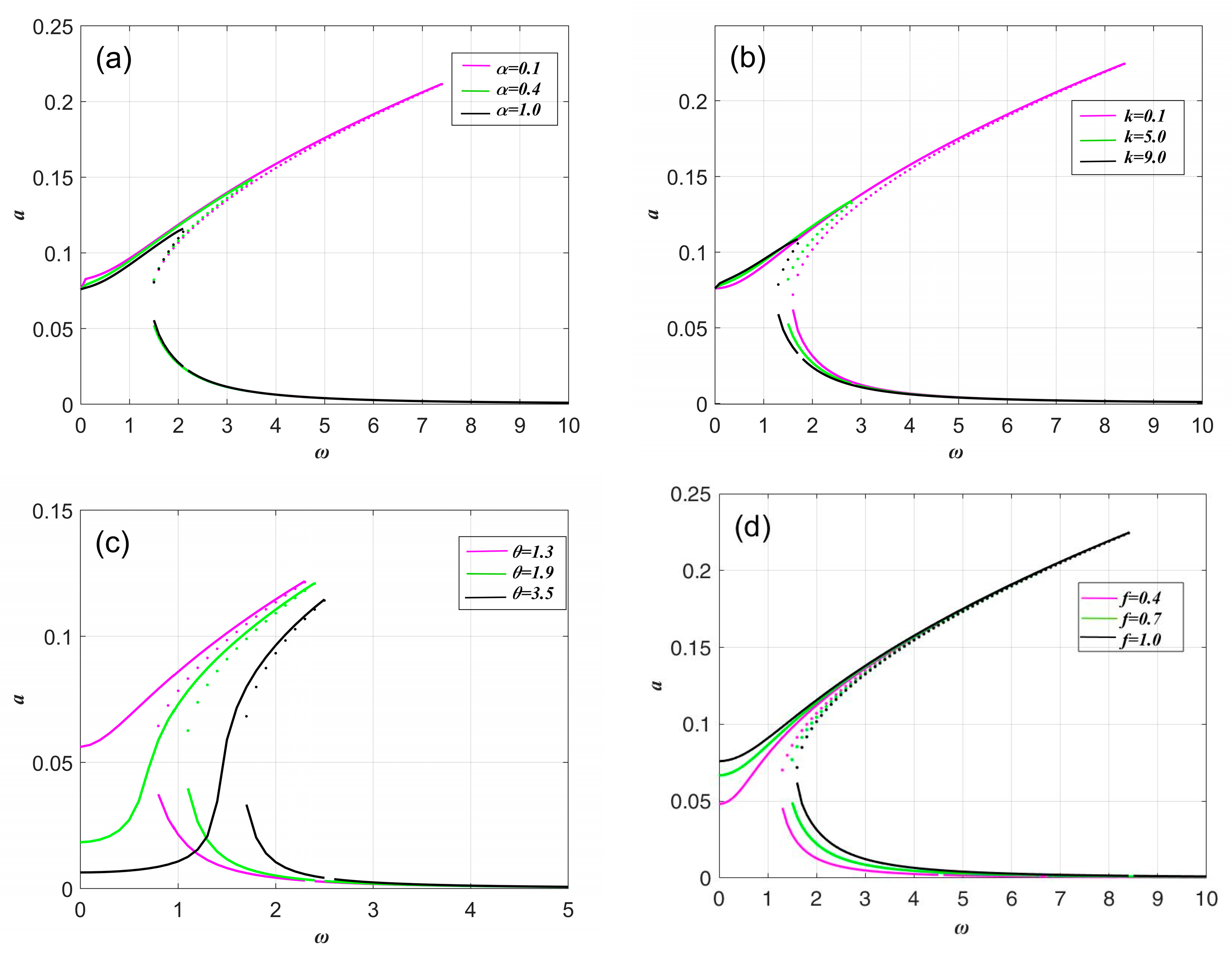
3.2. Numerical Verifications
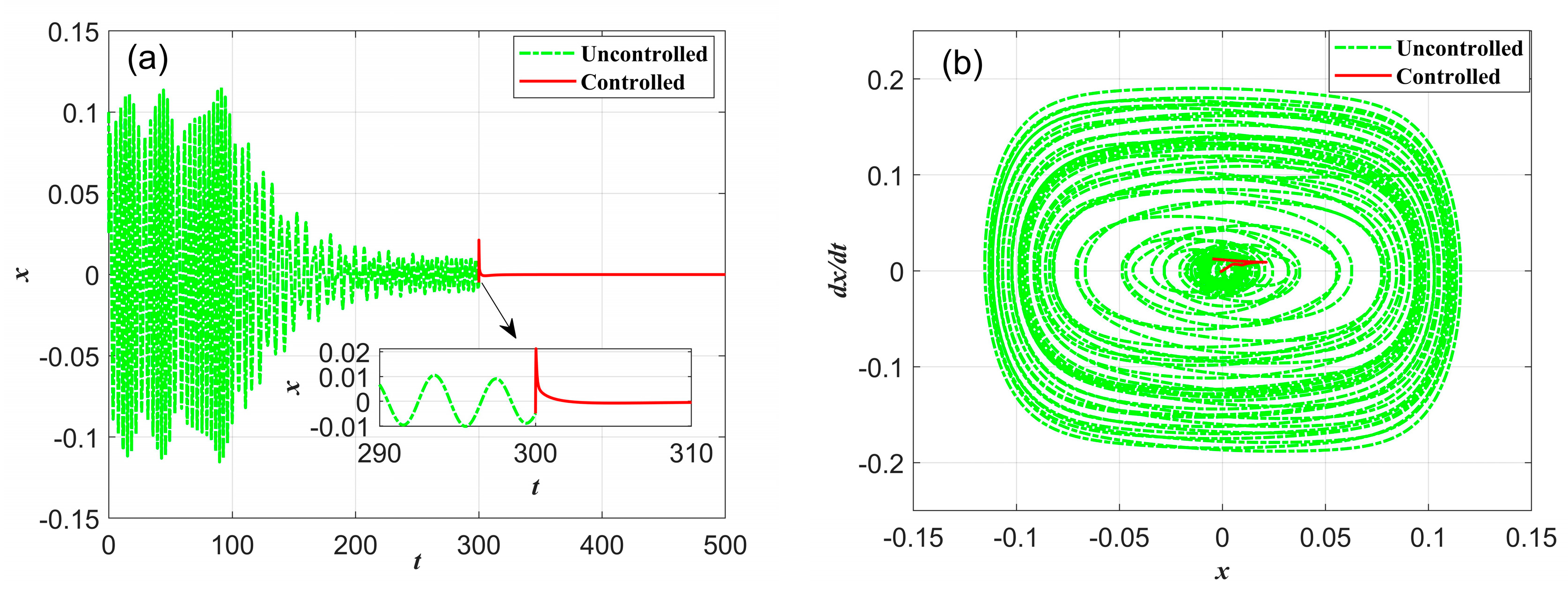
4. Active Vibration Suppression
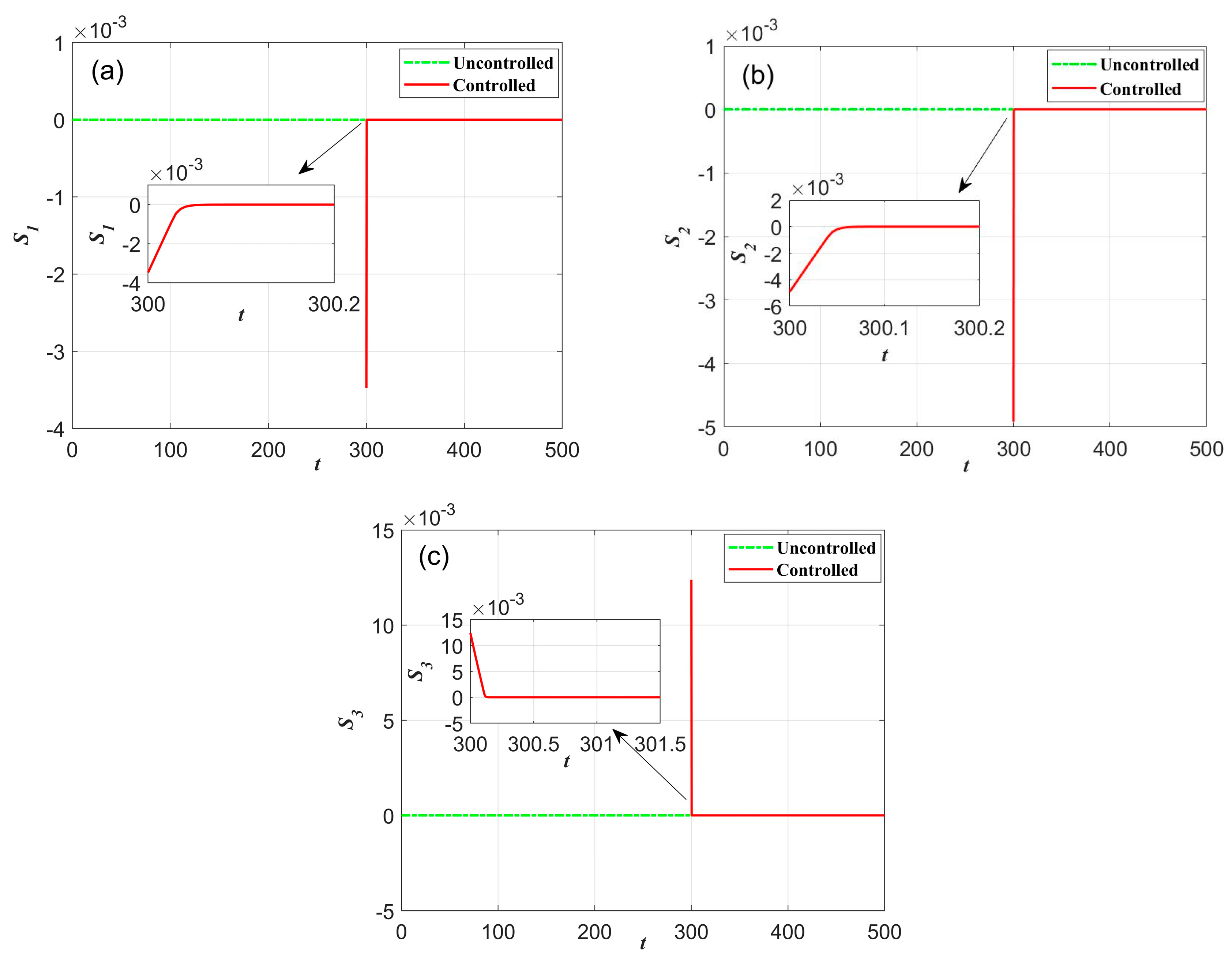
4.1. Design of Fractional Synovial Control Law
4.2. Asymptotic Stability Analysis
4.3. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tschoegl, N.W. The Phenomenological Theory of Linear Viscoelastic Behavior; Springer: Berlin, Germany, 1989. [Google Scholar]
- Caracciolo, R.; Gasparetto, A.; Giovagnoni, M. An experimental technique for complete dynamic characterization of a viscoelastic material. J. Sound Vib. 2004, 272, 1013–1032. [Google Scholar] [CrossRef]
- Ribeiro, E.A.; Pereira, J.T.; Bavastri, C.A. Passive vibration control in rotor dynamics: Optimization of composed support using viscoelastic materials. J. Sound Vib. 2015, 351, 43–56. [Google Scholar] [CrossRef]
- Allam, M.N.M.; Zenkour, A.M. Bending response of a fiber-reinforced viscoelastic arched bridge model. Appl. Math. Model. 2003, 27, 233–248. [Google Scholar] [CrossRef]
- Wang, X.; Jonathan, A.S.; Mark, E.R. A quantitative comparison of soft tissue compressive viscoelastic model accuracy. J. Mech. Behav. Biomed. Mater. 2013, 20, 126–136. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Xu, W.; Xu, Y. Dynamic responses of axially moving viscoelastic beam under a randomly disordered periodic excitation. J. Sound Vib. 2012, 331, 4045–4056. [Google Scholar] [CrossRef]
- Deng, J. Higher-order stochastic averaging for a SDOF fractional viscoelastic system under bounded noise excitation. J. Frankl. Inst. 2017, 354, 7917–7945. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, G.Q.; Zhao, B.; Wang, Y. Unexpected viscoelastic deformation of tight sandstone: Insights and predictions from the fractional Maxwell model. Sci. Rep. 2017, 7, 11336. [Google Scholar] [CrossRef]
- Xu, H.Y.; Jiang, X.Y. Creep constitutive models for viscoelastic materials based on fractional derivatives. Comput. Math. Appl. 2017, 73, 1377–1384. [Google Scholar] [CrossRef]
- Eldred, L.B.; Baker, W.P.; Palazotto, A.N. Kelvin-Voigt versus fractional derivative model as constitutive relations for viscoelastic materials. AIAA J. 2012, 33, 547–550. [Google Scholar] [CrossRef]
- Bagley, R.L. A theoretical basis for the application of fractional calculus to viscoelastic. J. Rheol. 1983, 27, 201–210. [Google Scholar] [CrossRef]
- AIJarbouh, A. Modelisation of rheological behavior of viscoelastic materials using the fractional derivative and transfer technique. Energy Procedia 2012, 19, 212–225. [Google Scholar] [CrossRef]
- Wang, L.; Sun, D.A.; Xie, Y.; Li, P.C. One-dimensional consolidation of fractional derivative viscoelastic saturated soil under arbitrary load. J. Geotech. Eng. 2017, 39, 1823–1831. [Google Scholar]
- Liu, L.C.; Zhang, W. Deformation characteristics of horizontal circular chamber in viscoelastic rock mass with fractional Kelvin model. Rock Soil Mech. 2005, 26, 287–289. [Google Scholar]
- Sales, T.P.; Marques, F.D.; Pereira, D.A.; Rade, D.A. Dynamic assessment of nonlinear typical section aero viscoelastic systems using fractional derivative-based viscoelastic model. J. Sound Vib. 2018, 423, 230–245. [Google Scholar] [CrossRef]
- Hao, J.W.; Wang, J.R.; Lu, L. Coupled system of fractional hemivariational inequalities with applications. Optimization 2024, 73, 969–994. [Google Scholar] [CrossRef]
- Tékam, G.T.O.; Kwuimy, C.A.K.; Woafo, P. Analysis of tristable energy harvesting system having fractional order viscoelastic material. Chaos 2015, 25, 013112. [Google Scholar] [CrossRef]
- Syta, A.; Litak, G.; Lenci, S.; Scheffler, M. Chaotic vibrations of the Duffing system with fractional damping. Chaos 2014, 24, 013107. [Google Scholar] [CrossRef]
- Liu, J.K.; Zhang, H.D.; Wang, J.B.; Jin, C.; Li, J.; Xu, W. A note on averaging principles for fractional stochastic differential equations. Fractal Fract. 2024, 8, 216. [Google Scholar] [CrossRef]
- Hao, J.W.; Wang, J.R.; Han, J.F. History-dependent fractional hemivariational inequality with time-delay system for a class of new frictionless quasistatic contact problems. Math. Mech. Solids 2022, 27, 1032–1052. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Y.G.; Liu, D.; Jia, W.; Huang, H. Responses of Duffing oscillator with fractional damping and random phase. Nonlinear Dyn. 2013, 74, 745–753. [Google Scholar] [CrossRef]
- Permoon, M.R.; Haddadpour, H.; Javadi, M. Nonlinear vibration of fractional viscoelastic plate: Primary, subharmonic, and superharmonic response. Int. J. Non-Linear Mech. 2018, 99, 154–164. [Google Scholar] [CrossRef]
- Lewandowski, R.; Wielentejczyk, P. Nonlinear vibration of viscoelastic beams described using fractional order derivatives. J. Sound Vib. 2017, 399, 228–243. [Google Scholar] [CrossRef]
- Liu, J.K.; Wei, W.; Xu, W. An averaging principle for stochastic fractional differential equations driven by fBm involving impulses. Fractal Fract. 2022, 6, 256. [Google Scholar] [CrossRef]
- Rüdinger, F. Tuned mass damper with fractional derivative damping. Eng. Struct. 2006, 28, 1774–1779. [Google Scholar] [CrossRef]
- Shen, Y.J.; Yang, S.P.; Xing, H.J.; Ma, H. Primary resonance of Duffing oscillator with two kinds of fractional-order derivatives. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3092–3100. [Google Scholar] [CrossRef]
- Liu, Q.; Xu, Y.; Kurths, J. Active vibration suppression of a novel airfoil model with fractional order viscoelastic constitutive relationship. J. Sound Vib. 2018, 432, 50–64. [Google Scholar] [CrossRef]
- Reyes-Melo, M.E.; Renterıa-Baltierrez, F.Y.; Lopez-Walle, B.; Lopez-Cuellar, E.; de Araujo, C.J. Application of fractional calculus to modeling the dynamic mechanical analysis of a NiTi SHAPE MEMORY ALLOY ribbon. J. Therm. Anal. Calorim. 2016, 126, 593–599. [Google Scholar] [CrossRef]
- Tareq, M.; Zaffar, M.; Manzoor, A.Z.; Mohyud-Din, S.T.; Manzoor, H.; Hashmi, S. A note on fractional order in thermo-elasticity of shape memory alloys’ dampers. Int. J. Heat Mass Transf. 2017, 114, 597–606. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Tunç, O.; Tunç, C. Solution estimates to Caputo proportional fractional derivative delay integro-differential equations. Revista de la Real Academia de Ciencias Exactas, Físicasy Naturales. Ser. A Matemáticas 2023, 117, 12. [Google Scholar]
- Falk, F. Model free-energy, mechanics and thermodynamics of shape memory alloys. Acta Met. 1980, 28, 1773–1780. [Google Scholar] [CrossRef]
- Savi, M.A.; Pacheco, P.M.C.L. Chaos and hyperchaos in shape memory systems. Int. J. Bifurc. Chaos 2002, 12, 645–657. [Google Scholar] [CrossRef]
- Scott, B.G.W.; Caffyn, J.E. An application of the theory of quasi-properties to the treatment of anomalous strain-stress relations. Philos. Mag. 1949, 40, 80–94. [Google Scholar]
- Du, M.L.; Wang, Z.H.; Hu, H.Y. Measuring memory with the order of fractional derivative. Sci. Rep. 2013, 3, 3431. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.J.; Yang, S.P.; Sui, C.Y. Analysis on limit cycle of fractional-order van der Pol oscillator. Chaos Solitons Fractals 2014, 67, 94–102. [Google Scholar] [CrossRef]
- Bandyopadhyay, B.; Janardhanan, S.; Spurgeon, S.K. Advances in Sliding Mode Control: Concept, Theory and Implementation; Springer: Berlin, Germany, 2013. [Google Scholar]
- Bandyopadhyay, B.; Kamal, S. Stabilization and Control of Fractional Order Systems: A Sliding Mode Approach; Springer: New York, NY, USA, 2015. [Google Scholar]
- Wang, J.Y.; Liang, H.C.; Sun, Z.W. Dynamics and control based on relative coupling of even numbers. J. Astronaut. 2010, 31, 1711–1717. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, R.; Meng, N.; Wang, J.; Li, J.; Wang, J. Response Analysis and Vibration Suppression of Fractional Viscoelastic Shape Memory Alloy Spring Oscillator Under Harmonic Excitation. Axioms 2024, 13, 803. https://doi.org/10.3390/axioms13110803
Guo R, Meng N, Wang J, Li J, Wang J. Response Analysis and Vibration Suppression of Fractional Viscoelastic Shape Memory Alloy Spring Oscillator Under Harmonic Excitation. Axioms. 2024; 13(11):803. https://doi.org/10.3390/axioms13110803
Chicago/Turabian StyleGuo, Rong, Na Meng, Jinling Wang, Junlin Li, and Jinbin Wang. 2024. "Response Analysis and Vibration Suppression of Fractional Viscoelastic Shape Memory Alloy Spring Oscillator Under Harmonic Excitation" Axioms 13, no. 11: 803. https://doi.org/10.3390/axioms13110803
APA StyleGuo, R., Meng, N., Wang, J., Li, J., & Wang, J. (2024). Response Analysis and Vibration Suppression of Fractional Viscoelastic Shape Memory Alloy Spring Oscillator Under Harmonic Excitation. Axioms, 13(11), 803. https://doi.org/10.3390/axioms13110803