Abstract
In this paper the semi-Hyers–Ulam–Rassias stability of some Volterra integro-differential equations is investigated, using the Laplace transform. This is a continuation of some previous work on this topic. The equation in the general form contains more terms, where the unknown function appears together with the derivative of order one and with two integral terms. The particular cases that are considered illustrate the main results for some polynomial and exponential functions.
MSC:
47H10; 45G10; 47N20
1. Introduction
The study of Ulam stability was initiated due to an interesting problem posed in the year 1940, by Ulam [1], regarding the stability for the equation of group homomorphisms. An answer was given by Hyers [2], in 1941, in the framework of Banach spaces, for the additive Cauchy equation. In the following years, many mathematicians were concerned with this problem, also for the case of differential equations, integral equations, and partial differential equations.
First, results regarding Hyers–Ulam stability of differential equations were provided by Obloza [3] and Alsina and Ger [4]. Further, in the papers [5,6,7,8,9], the stability of first order linear differential equations and linear differential equations of higher order was studied.
Brzdek, Popa, Rasa, and Xu presented in [10] a collection of results related to Hyers–Ulam stability.
The Hyers–Ulam–Rassias stability of a Volterra integral equation was first studied by Jung in [11], using the fixed point method, adopting an idea of Cadariu and Radu from [12]. In [11] the following equation was investigated:
Next, Castro and Ramos in [13] obtained the stability of the integral equation
A more complicated equation,
was considered in [14] by Castro and Simões. The same authors studied in the paper [15] two more equations:
and
through the generalized Bielecki metric.
Generalized Bielecki metric was also used by Castro and Simões in [16], where the equation
was studied, and in [17], by Simoes, Carapau, Correia, where the equation
was investigated.
In [18], Otrocol and Ilea proved stability results for the equation
Hyers–Ulam stability of integral equations was also studied, by various methods, in numerous papers among which we mention [19,20,21,22,23,24,25,26,27,28,29].
The Laplace integral transform was employed for the first time to investigate the stability of linear differential equations in the recent work of Rezaei, Jung, and Rassias [30]. The idea was developed and extended subsequently also in several other papers, such as [31,32,33].
Using the previously mentioned method of Rezaei, Jung, and Rassias [30], we have established in [34] the semi-Hyers–Ulam–Rassias stability of the integral-differential equation:
and in [35] the semi-Hyers–Ulam–Rassias stability of the another integral-differential equation:
Other types of convolutional equations have been studied in [36,37].
In this paper, we will study the semi-Hyers–Ulam–Rassias stability of the equation
where is the real set or the complex set . The functions are given continuous functions and is continuously differentiable.
The contents of the paper are the following: in Section 2 we recall some properties of the Laplace transform and define the semi-Hyers–Ulam–Rassias stability of the Equation (1). The main results (Theorems 1–5) are presented in the next section. The first theorem is formulated for the general form of the equation, and the estimation of the difference between the exact and the approximate solutions is given in terms of the inverse Laplace transform. Afterwards, several particular cases of the function g are treated. In Theorems 2 and 3 the function , is considered, for the cases and respectively. In Theorem 4 the function , and in Theorem 5 the function , with are taken. It is often difficult to calculate the inverse Laplace transform, however, this could be done in the special cases studied. Two examples illustrate the general theorem. The last section contains stability results for two equations (a general one and a particular one) obtained with the help of the double Laplace transform.
2. Preliminary Notions and Results
In the next sections, if not mentioned otherwise, consider the functions , where by is denoted the set of real numbers or the set of complex numbers . Suppose that these functions are continuous and of exponential order, such that their Laplace transform is well defined. Suppose also that the function x is continuously differentiable. For the sake of simplicity, instead of the lateral limits , we write , respectively.
As usual, denotes the Laplace integral transform of the function x, defined by
on the open half plane , where is the abscissa of convergence of the function x and stands for the real part of the complex number s. The inverse Laplace transform of a function X will be denoted by . Some properties used in the paper are
where by is denoted the convolution product of the two functions f and g. It is a well known property that the Laplace transform is bijective and linear.
The following lemma will be used in the main results of the paper. It assures the existence of the Laplace inverse for a class of rational functions.
Lemma 1
([30]). Let and where are non-negative integers with and are scalars, Then there exists an infinitely differentiable function , such that
and
where .
Let We associate to the equation in study the inequality
According to [16] we formulate the following definition:
Definition 1.
Notice that a function is a solution of the inequality (2) if, and only if, there exists a function such that the following hold:
(1) ,
(2) .
3. Main Results
The main result regarding the stability of Equation (1) is the next Theorem. We will also particularize it to some special cases for the integrand function g.
Theorem 1.
Proof.
Let ,
We can write (4) as
Applying the Laplace transform to the above equality, we have
hence
Let
We remark that
Hence we obtain
Since the transform is bijective, it follows that
which means that is indeed a solution of (1).
We can write
hence
□
Example 1.
Study the semi-Hyers–Ulam–Rassias stability of the equation
continuously differentiable.
For , we consider the inequality
In order to apply Theorem 1, we notice that and . Hence, if a continuously differentiable function satisfies the inequality (6), then there exists a solution of (5) such that
that is the Equation (5) is semi-Hyers–Ulam–Rassias stable.
The exact solution of the Equation (7) is
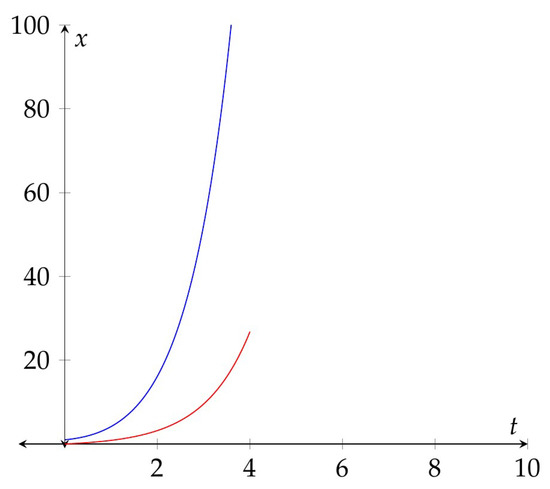
In Figure 1 the exact solution (blue color) of the Equation (5) and the function (red color), which borders the difference on , for , are represented.
Figure 1.
Representation of the exact solution (blue color), and of the function (red color), which borders the difference on , for , together.
Example 2.
Study the semi-Hyers–Ulam–Rassias stability of the equation
continuously differentiable.
For , we consider the inequality
We have in this case that and further on . We apply Theorem 1, hence if a continuously differentiable function satisfies the inequality (8), then there exists a solution of (7), such that
that is the Equation (5) is semi-Hyers–Ulam–Rassias stable.
Remark that the exact solution of the Equation (7) is
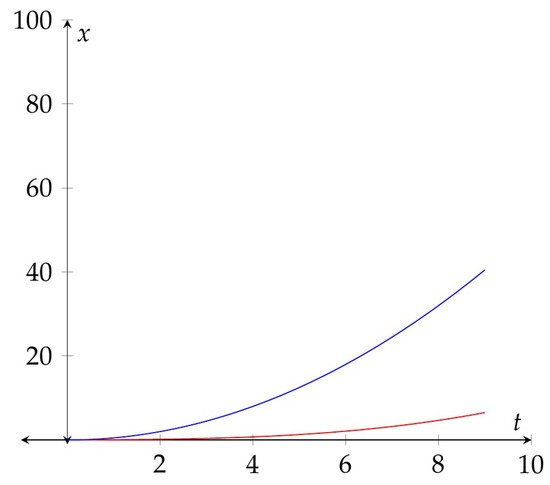
In Figure 2 the exact solution (blue color) of the Equation (7) and the function (red color), which borders the difference on , for , is represented.
Figure 2.
Representation of the exact solution (blue color), and of the function (red color), which borders the difference, on , for , together.
Next we will study several particular cases of functions g. The first to be considered is the case where ,
Theorem 2.
Let , with and suppose that .
Proof.
If then hence
Suppose now that . We have
Since it follows that we apply Theorem 1 and we obtain
which completes the proof. □
Theorem 3.
Let , and suppose that and . Let be the zeroes of the equation . Let such that
that is and
Proof.
We have
We apply Theorem 1 and we obtain
which completes the proof. □
We examine now the case when , ,
Theorem 4.
Let ,
Proof.
We have
and using Lemma 1. Hence, we can apply Theorem 1, which completes the proof. □
We consider now another particular case of the equation, namely when , , , and g is an exponential function.
Theorem 5.
Let be defined as , with , . Suppose that , , and . Let .
If a continuously differentiable function verifies the inequality
then there exists a solution of (1), such that
for any , where are the roots of and , such that .
Proof.
Theorem 1 provides, for , the inequality
When g is the exponential function , it follows that
Let be the zeroes of the equation , which are distinct since . Let be such that
We obtain and, in consequence,
The evaluation given by Theorem 1 becomes
Let be one of the previously mentioned roots. Suppose that , that is , with . Then, , so and . Since is a real number, this implies and . By this remark, we can distinguish several situations.
If and , then the roots of the equation are , so . We obtain further
If and , then are real, non-zero numbers, so and . We obtain
If , then also and , so the previous estimation holds. □
Remark 1.
If , with like in the previous Theorem, but , then the equation admits a double root . Since , it follows that also . We have
The estimation of the difference between the approximate and the exact solution will be in this case
4. Study of Other Equations via Double Laplace Transform
Next we will apply double Laplace transform to study semi-Hyers–Ulam–Rassias stability of convolution type equations, when functions of two variables are involved.
According to [38], the double Laplace transform of a function is
provided that the integral exists.
The corresponding inverse double Laplace transform is
where must be analytic for all in the region defined by the inequalities , , where c, d are real constants, suitably chosen.
where by is denoted the convolution product of and .
Now, we consider the functions and . Suppose that these functions are continuous and of exponential order.
We consider the equation
and the inequality
Theorem 6.
Proof.
Let
We have
hence
Let
We remark that is a solution of the Equation (9). We have
Applying the inverse Laplace transform we obtain
□
5. Conclusions
Hyers–Ulam stability has been extensively studied for various types of equations and by various methods. In this work, we continued the study of semi-Hyers–Ulam–Rassias stability of integral-differential equations, started in the works [34,35], using the Laplace transform. The equations considered in this paper, with two convolutional type integrals, have not been studied yet from this point of view. Equations of this type can appear in image processing. A general theorem, in which the inverse Laplace transform occurs, is established first. Next, various functions are considered, providing cases when the inverse transform can be actually determined. One can also examine some other functions g for which the hypotheses of Theorem 1 are checked.
The results can be extended, in this respect the last section is dedicated to the stability of two equations of convolution type, of two variables. In these cases, the method involves the double Laplace transform, which opens new possibilities for further research.
Author Contributions
Conceptualization, methodology, writing—original draft preparation, writing—original draft preparation, D.I. and D.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ulam, S.M. A Collection of Mathematical Problems; Interscience: New York, NY, USA, 1960. [Google Scholar]
- Hyers, D.H. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 222–224. [Google Scholar] [CrossRef]
- Obloza, M. Hyers stability of the linear differential equation. Rocznik Nauk-Dydakt. Prace Mat. 1993, 13, 259–270. [Google Scholar]
- Alsina, C.; Ger, R. On some inequalities and stability results related to exponential function. J. Inequal. Appl. 1998, 2, 373–380. [Google Scholar] [CrossRef]
- Takahasi, S.E.; Takagi, H.; Miura, T.; Miyajima, S. The Hyers-Ulam stability constant of first order linear differential operators. J. Math. Anal. Appl. 2004, 296, 403–409. [Google Scholar] [CrossRef]
- Jung, S.-M. Hyers-Ulam stability of linear differential equations of first order, III. J. Math. Anal. Appl. 2005, 311, 139–146. [Google Scholar] [CrossRef]
- Cimpean, D.S.; Popa, D. On the stability of the linear differential equation of higher order with constant coefficients. Appl. Math. Comput. 2010, 217, 4141–4146. [Google Scholar] [CrossRef]
- Popa, D.; Rasa, I. Hyers-Ulam stability of the linear differential operator with non-constant coefficients. Appl. Math. Comput. 2012, 219, 1562–1568. [Google Scholar]
- Novac, A.; Otrocol, D.; Popa, D. Ulam stability of a linear difference equation in locally convex spaces. Results Math. 2021, 76, 33. [Google Scholar] [CrossRef]
- Brzdek, J.; Popa, D.; Rasa, I.; Xu, B. Ulam Stability of Operators; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Jung, S.-M. A fixed point approach to the stability of a Volterra integral equation. Fixed Point Theory Appl. 2007, 2007, 57064. [Google Scholar] [CrossRef]
- Cadariu, L.; Radu, V. On the stability of the Cauchy functional equation: A fixed point approach. In Iteration Theory (ECIT ’02); Vol. 346 of Grazer Mathematische Berichte; Karl-Franzens-Univ. Graz: Graz, Austria, 2004; pp. 43–52. [Google Scholar]
- Castro, L.P.; Ramos, A. Hyers-Ulam-Rassias stability for a class of nonlinear Volterra integral equations. Banach J. Math. Anal. 2009, 3, 36–43. [Google Scholar]
- Castro, L.P.; Simões, A.M. Hyers-Ulam and Hyers-Ulam-Rassias stability of a class of Hammerstein integral equations. AIP Conf. Proc. 2017, 1798, 020036. [Google Scholar] [CrossRef]
- Castro, L.P.; Simões, A.M. Hyers-Ulam-Rassias stability of nonlinear integral equations through the Bielecki metric. Math. Methods Appl. Sci. 2018, 41, 7367–7383. [Google Scholar] [CrossRef]
- Castro, L.P.; Simões, A.M. Different Types of Hyers-Ulam-Rassias Stabilities for a Class of Integro-Differential Equations. Filomat 2017, 31, 5379–5390. [Google Scholar] [CrossRef]
- Simões, A.M.; Carapau, F.; Correia, P. New sufficient conditions to Ulam stabilities for a class of higher order integro-differential equations. Symmetry 2021, 13, 2068. [Google Scholar] [CrossRef]
- Ilea, V.; Otrocol, D. Existence and Uniqueness of the Solution for an Integral Equation with Supremum, via w-Distances. Symmetry 2020, 12, 1554. [Google Scholar] [CrossRef]
- Cadariu, L. The generalized Hyers-Ulam stability for a class of the Volterra nonlinear integral equations. Sci. Bull. Politeh. Univ. Timis. Trans. Math. Phys. 2011, 56, 30–38. [Google Scholar]
- Marian, D.; Ciplea, S.A.; Lungu, N. On a functional integral equation. Symmetry 2021, 13, 1321. [Google Scholar] [CrossRef]
- Gachpazan, M.; Baghani, O. Hyers–Ulam stability of nonlinear integral equation. Fixed Point Theory Appl. 2010, 2010, 927640. [Google Scholar] [CrossRef]
- Gachpazan, M.; Baghani, O. Hyers–Ulam stability of Volterra integral equation. Int. J. Nonlinear Anal. Appl. 2010, 1, 19–25. [Google Scholar]
- Morales, J.; Rojas, E. Hyers–Ulam and Hyers–Ulam–Rassias stability of nonlinear integral equations with delay. Int. J. Nonlinear Anal. Appl. 2011, 2, 1–7. [Google Scholar]
- Bahyrycz, A.; Brzdek, J.; Lesniak, Z. On approximate solutions of the generalized Volterra integral equation. Nonlinear Anal.-Real 2014, 20, 59–66. [Google Scholar] [CrossRef]
- Rus, I.A. Gronwall lemma approach to the Hyers–Ulam–Rassias stability of an integral equation. In Nonlinear Analysis and Variational Problems; Springer Optim. Appl., Springer: New York, NY, USA, 2010; Volume 35, pp. 147–152. [Google Scholar]
- Brzdek, J.; Eghbali, N. On approximate solutions of some delayed fractional differential equations. Appl. Math. Lett. 2016, 54, 31–35. [Google Scholar] [CrossRef]
- Akkouchi, M. Hyers–Ulam–Rassias stability of nonlinear Volterra integral equations via a fixed point approach. Acta Univ. Apulensis Math. Inform. 2011, 26, 257–266. [Google Scholar]
- Tunç, C.; Tunç, O.; Yao, J.-C. On the Enhanced New Qualitative Results of Nonlinear Integro-Differential Equations. Symmetry 2023, 15, 109. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O. Solution estimates to Caputo proportional fractional derivative delay integro-differential equations. Rev. Real Acad. Cienc. Exactas Fis. Nat. Ser. A-Mat. 2023, 117, 12. [Google Scholar] [CrossRef]
- Rezaei, H.; Jung, S.-M.; Rassias, T. Laplace transform and Hyers-Ulam stability of linear differential equations. J. Math. Anal. Appl. 2013, 403, 244–251. [Google Scholar] [CrossRef]
- Alqifiary, Q.; Jung, S.-M. Laplace transform and generalized Hyers-Ulam stability of linear differential equations. Electron. J. Differ. Equ. 2014, 2014, 1–11. [Google Scholar]
- Murali, R.; Ponmana Selvan, A. Mittag-Leffler-Hyers-Ulam stability of a linear differential equation of first order using Laplace transforms. Canad. J. Appl. Math. 2020, 2, 47–59. [Google Scholar]
- Shen, Y.; Chen, W. Laplace Transform Method for the Ulam Stability of Linear Fractional Differential Equations with Constant Coefficients. Mediterr. J. Math. 2017, 14, 1–17. [Google Scholar] [CrossRef]
- Inoan, D.; Marian, D. Semi-Hyers-Ulam-Rassias stability of a Volterra integro-differential equation of order I with a convolution type kernel via Laplace transform. Symmetry 2021, 13, 2181. [Google Scholar] [CrossRef]
- Inoan, D.; Marian, D. Semi-Hyers–Ulam–Rassias Stability via Laplace Transform, for an Integro-Differential Equation of the Second Order. Mathematics 2022, 10, 1893. [Google Scholar] [CrossRef]
- Musaev, H.K. The Cauchy problem for degenerate parabolic convolution equation. TWMS J. Pure Appl. Math. 2021, 12, 278–288. [Google Scholar]
- Babolian, E.; Salimi Shamloo, A. Numerical solution of Volterra integral and integro-differential equations of convolution type by using operational matrices of piecewise constant orthogonal functions. J. Comput. Appl. Math. 2008, 214, 495–508. [Google Scholar] [CrossRef]
- Debnath, L. The Double Laplace Transform and their properties with applications to functional, integral and partial differential equations. Int. J. Appl. Comput. Math. 2016, 2, 223–241. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).