Abstract
In this article, an intelligent system utilizing type-3 fuzzy logic for automated image quality tuning in televisions is presented. The tuning problem can be formulated as controlling the television imaging system to achieve the requirements of production quality. Previously, the tuning process has been carried out by experts, by manually adjusting the television imaging system on production lines to meet the quality control standards. In this approach, interval type-3 fuzzy logic is utilized with the goal of automating the tuning of televisions manufactured on production lines. An interval type-3 fuzzy approach for image tuning is proposed, so that the best image quality is obtained and, in this way, meet quality requirements. A system based on type-3 fuzzy control is implemented with good simulation results. The validation of the type-3 fuzzy approach is made by comparing the results with human experts on the process of electrical tuning of televisions. The key contribution is the utilization of type-3 fuzzy in the image tuning application, which has not been reported previously in the literature.
MSC:
03B52; 03E72; 62P30
1. Introduction
In this article, the application of interval type-3 fuzzy theory [1,2,3,4,5,6] for automating the tuning process is presented. The tuning process involves a process of dynamically adjusting the image quality to achieve the best possible image in the end. A set of fuzzy rules that encapsulates the knowledge of experts in performing the tuning process has been designed. Based on these fuzzy rules we propose the automation of television tuning. Interval type-3 fuzzy enables the handling of the decision-making uncertainty for this problem in a better way than other available alternatives described in the literature, such as type-1 [7,8,9], interval type-2, and general type-2 fuzzy logic [10,11,12,13,14,15,16,17,18]. Of course, there are successful applications of type-1 fuzzy control in the recent literature, such as the excellent works presented in [19,20,21], but the main goal of this article was exploring the utilization of type-3 in this particular application and its comparison with type-2 and type-1.
The key issue that we are dealing with in this work is achieving a way to reproduce images in the best fashion in televisions. In the production of televisions, we usually find a section on the manufacturing line with the responsibility of adjusting the imaging system. Traditionally, an expert adjusts the imaging system using a remote controller, based on voltage and current values. Here, we are dealing with a system based on type-3 fuzzy for controlling the image tuning of televisions. The interval type-3 system has a rule base formed from expert knowledge about the tuning of televisions. The main reason behind the utilization of interval type-3 fuzzy logic is to model better the uncertainty in the decision-making process [6,22]. We need to consider the voltage, current intensity, time, and quality as fuzzy variables in the fuzzy rules [23] and define the membership functions (MFs) for these variables that reflect real data and the knowledge of experts.
Several important related works have demonstrated the efficiency of interval type-3 fuzzy logic systems (IT3FLSs) when compared to type-1 fuzzy logic systems (T1FLSs), interval type-2 fuzzy logic systems (IT2FLSs), and generalized type-2 fuzzy logic systems (GT2FLSs); and some of these works are highlighted in the following: in [24] a subsethood for type-n fuzzy sets is presented by Rickard et al.; in [25] a related approach to the design of interval type-3 TS systems is presented by Singh et al.; in [3] Qasem et al. present a type-3 logic fuzzy system that was optimized using a Kalman filter with adaptive fuzzy kernel size; in [26] Wang et al. present a non-singleton type-3 fuzzy approach for flowmeter fault detection for the gas industry; in [27] Alattas et al. present a new data-driven control system for gyroscopes: using type-3 fuzzy systems; in [1] Cao et al. analyze a deep-learned recurrent type-3 fuzzy system with application for renewable energy prediction; in [28] Tian et al. design a deep-learned type-3 fuzzy system and describe its application in modeling problems; in [5] Mohammadzadeh et al. describe an interval type-3 fuzzy system and a new online fractional-order learning algorithm; and in [29] Ma et al. use an optimal type-3 fuzzy system for solving singular equations.
The field of control is an area in which there is a wide and deep number of problems where IT3FLSs may prove to have good performance. The following works focus their studies on showing that an IT3FLS is an excellent tool in control, based on their results. A stabilization of deep type-3 fuzzy control is presented by Gheisarnejad et al. in [30]; an interval type-3 control for solar systems is developed by Liu et al. in [6]; a type-3 controller for gyroscopes is studied by Vafaie et al. in [31]; interval type-3 control for navigation of autonomous vehicles is presented by Tian et al. in [32]; a fractional-order type-3 fuzzy control is implemented by Mohammadzadeh et al. in [33]; an interesting model-predictive type-3 controller for power converters is presented by Gheisarnejad et al. in [34]; a predictive type-3 control for multi-agents is presented by Taghieh et al. in [35]; an event-triggered type-3 controller for multi-agent systems is presented by Yan et al. in [36]; and a type-3 fuzzy voltage management is applied in battery systems by Nabipour et al. in [37]. As can be noted from the discussion of previous works on type-3 fuzzy logic, the particular application that is being considered in this article has not been tackled before with interval type-3 fuzzy models, and this was part of the motivation for carrying out this work. In addition, from a practical point of view, we are presenting a working prototype to the industrial workers in a manufacturing plant in Tijuana, Mexico (as they provided the experts to give us their empirical knowledge on tuning the imaging system). Additionally, on the theoretical side, we were able to extend concepts from type-1 and type-2 to the level of type-3 [38], that could be useful for other problems. In summary, the objective of this research work was to extend the theory and methodology for designing type-2 fuzzy to interval type-3 fuzzy, and also to test this theory and methodology with a challenging application that allows us to make a comparative study of type-3 versus type-2 and type-1 in tuning the imaging systems of televisions.
The key contribution is the utilization of interval type-3 fuzzy theory for achieving an efficient tuning during the production of televisions. This has not been previously reported in the literature, which is evidence of the innovative nature of this research work. In addition, we show that interval type-3 outperforms type-2 and type-1 fuzzy in handling the uncertainty in the decision-making process involved in the evaluation of image quality. There is also innovation on the application side of this work. It is worth noting that the utilization of type-3 fuzzy in the image-tuning application has not been described previously in the literature, which indicates of the novelty of the study. There are only applications of type-2 and type-1 to manufacturing problems reported at this time [23]. In this sense, the approach presented here could be generalized to other problems related to the manufacturing of similar, products, such as sound speakers, sound systems, and others. These problems also involve the tuning of images or sound in a similar way, and the approach proposed here could be adapted to solve them.
The rest of the paper is described as follows: Section 2 highlights the concepts of interval type-3. Section 3 outlines the basic terminology involved in Mamdani type-3 fuzzy systems. Then, Section 4 describes how to use type-3 fuzzy techniques for automating the tuning of televisions and illustrates its validity with simulations. At the end, Section 5 outlines the conclusions.
2. Interval Type-3 Fuzzy Theory
We begin by formulating type-3 terminology.
Definition 1.
A type-3 fuzzy set (T3 FS) [2,4,5,38], denoted by, is represented by the plot of a function called MF ofin the Cartesian productin, whereis the primary variable universe of, x.
In this case, u is the membership function of x, and v is the membership function of u. The MF of is formulated by (or for short) and it is labeled a type-3 MF (T3 MF). In other words,
where is the universe for the secondary variable and is the universe for tertiary variable . A T3FS, can be formulated as:
where is notation for the union over all the admissible values.
Equation (3) is formulated as a T3 FS MF mapping with the expressions:
where is the primary MF, is the secondary membership function, and is the tertiary MF of the T3 FS.
If for all , , , the T3 FS, , is simplified to an interval type-3 fuzzy set (IT3 FS) with the notation , postulated by expression (7):
where
Assuming that and the lower and upper MFs are general type-2 MFs (T2 MFs) on the plane , Equation (4) can be simplified to an interval type-3 MF (IT3 MF), , defined by Equation (11):
where the lower T2 MF , is contained in the upper T2 MF , that is, , then , and as a consequence an IT3 FS is expressed by two T2 FSs, one inferior with T2 MF , and another superior , with T2 MF , expressed by Equations (12) and (13) (see Figure 1):
where the secondary MFs of and are T1 MFs of T1FS expressed by Equations (14) and (15):
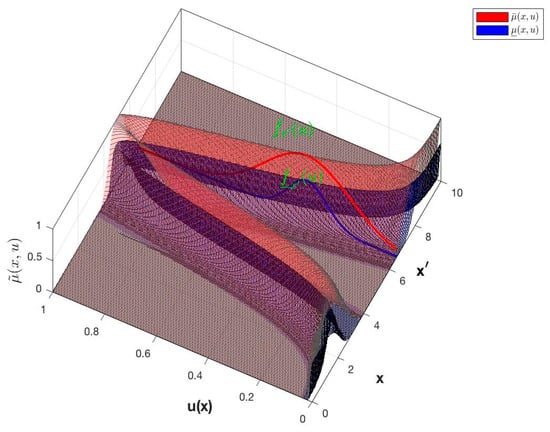
Figure 1.
IT3 FS with IT3MF where is the LMF and is the UMF.
In this case, we utilize interval type-3 MFs that are scaled Gaussians in the primary and secondary variables, respectively. This function can be represented as , with Gaussian footprint of uncertainty , characterized with parameters (UpperParameters) for the upper membership function UMF, and for the lower membership function LMF the parameters (LowerScale) and (LowerLag), to form the ]. The vertical cuts characterize the , and are IT2 FSs with Gaussian IT2 MFs, with parameters for the UMF and LMF (LowerScale), (LowerLag). The IT3 MF, ScaleGaussScaleGaussIT3MF (x,,, ) is described with the following equations:
where and is the machine epsilon. If , then . In this case, and are the upper and lower limits of the domain of uncertainty (DOU). The range, and radius, of the FOU are:
The apex or core, , of the IT3 MF , is defined by the expression:
where . Then, the vertical cuts with IT2 MF, , are described by the equations:
where . If , then . Then, and are the UMF and LMF of the IT2 FSs of the vertical cuts of the secondary IT2MF of the IT3 FS.
3. Mamdani Type-3 Fuzzy Models
The IT3 FLS structure contains the same main components (fuzzifier, rule base, inference machine and, in the final stage, an output processing unit) as its analogous T2 FLSs. While in the case of T2 FLSs the final stage consists of a process of type reduction to T1 FS + defuzzification, in the case of an IT3 FLS, the output process consists of type reduction to an IT2 FS + defuzzification. The fuzzy operators of the inference machine of an IT3 FLS and the type-reduction methods are equivalent to a T2 FLS, except that in the inputs and outputs we have IT3 FSs in an IT3 FLS. The interval type-3 fuzzy operators of union () and intersection (), are related to the join (⨆) and meet (⨅) operators, respectively. The Cartesian product () and the implication () are intersection operations. We first define the type-3 fuzzy operators, as follows: consider two IT3 FSs, and , that are expressed utilizing the representation of horizontal cuts, as in [38]:
where
where
Union of IT3 FSs
The union of two IT3FSs, , is calculated using horizontal cuts as:
where
and
Intersection of IT3 FSs
The intersection of two IT3FSs, is calculated using horizontal cuts as:
where
Complement of IT3 FSs
The complement of an IT3 FS, , is calculated using horizontal cuts as:
Definition 2.
The structure of the Mamdani if–then rule is:
where i = 1…, n (number of inputs), j = 1…, m (number of outputs) and k = 1…, r (number of rules).
To initiate the explanation, we represent the antecedents of the rules with a fuzzy relation , utilizing the Cartesian product, , with interval type-3 fuzzy sets (IT3 FS), , and the implication for the consequent of the j-th output is also an IT3 FS, ; then, the fuzzy relation of the rule can be formulated as:
The n-dimensional input is given by a type-2 fuzzy relation, , with T2MF as:
Each relation of the rule establishes a fuzzy set of the consequent of the rule in Y such that:
where the level of activation of the rule is an IT3 FS, . By aggregating all the sets, that represent the levels of activation of the rules, we obtain the aggregated set for the outputs j = 1…, m.
The abstract model of is a fuzzy model IT3 (), where the sets are submodels of .
Equation (32) is obtained by the MF of IT3 fuzzy relation, , and is:
where is the input–output relation between the fuzzy set that fires the inference of a rule (reasoning) and the output fuzzy set. The composition () is a nonlinear mapping from input to an IT3 FS with MF, ( of the output . The reasoning is a mechanism that transforms fuzzy sets into fuzzy sets by the composition operator (basically a max–min operator). Simplifying Equation (32), we obtain:
where
Maximizing function , we obtain the supremum value in :
The firing strength , is the membership of the t-norm operation, , of all the supreme membership values of the intersection of each input with its antecedent that contributes to the rule level of activation, i.e.:
The level of activation of the rule is the membership resulting from the operation ⨅ of the firing strength and the membership of the consequent of the rule , that is, the composition operation (∘) of the facts and the knowledge base rules that describe the relational function, .
Equation (27) for the MF of the fuzzy relation IT3, , is the aggregation of all the rules for each output j= 1…, m, using the operator join ()-fuzzy union-. The combining of the rules using the join (⨆) operator for calculating the aggregation of the values of is described by the equation:
or
For applications that require a numeric output, is reduced to an IT2 FS or interval, and this is then reduced to a numeric value . The type reduction methods are the same as the ones used in T2 FS theory.
In Figure 2, we illustrate the inference in a type-3 system for a particular value of x = 4, and in Figure 3 the type reduction process.
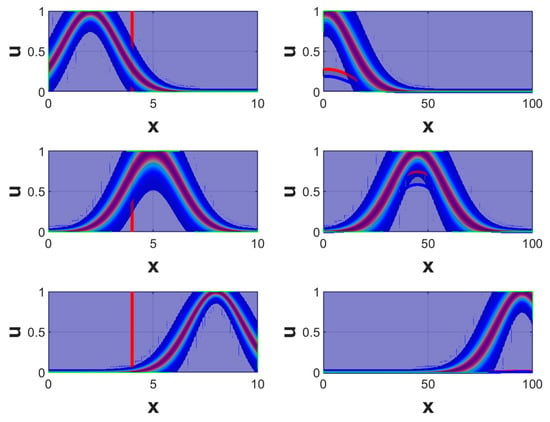
Figure 2.
Illustration of the inference process for a value of x = 4.
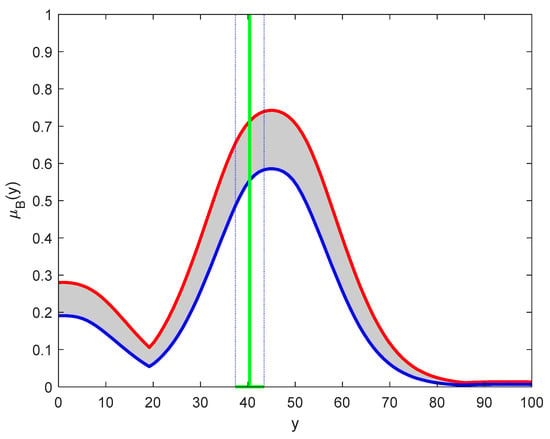
Figure 3.
Illustration of the type reduction process for a value of x = 4.
In Figure 4, we illustrate the inference in a type-3 fuzzy system for another value of x = 6, and in Figure 5, the corresponding type reduction process.
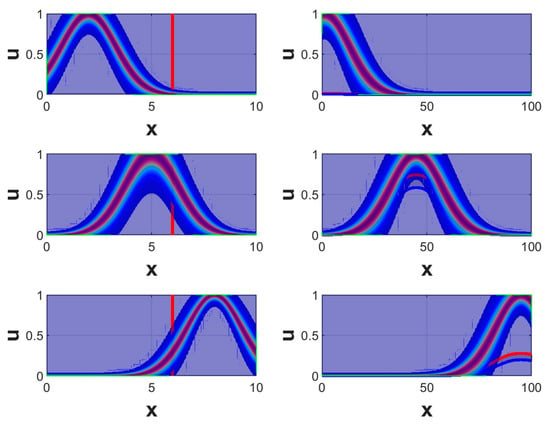
Figure 4.
Illustration of the inference process for a value of x = 6.
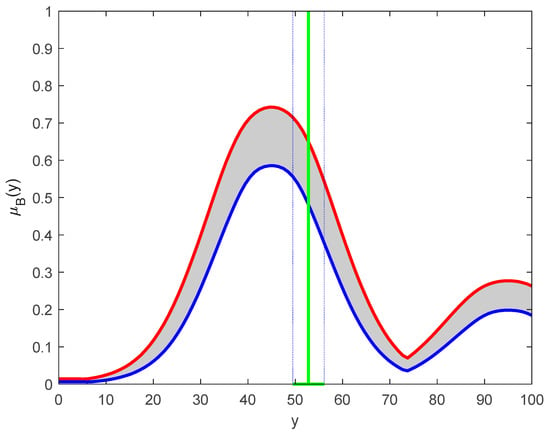
Figure 5.
Illustration of the type reduction process for a value of x = 6.
For more details on the type reduction process for type-3 fuzzy sets the reader can check a more detailed (step by step) explanation in a recent reference work on type-3 fuzzy systems [38]. Of course, this type reduction is similar to the process that is performed for type-2 fuzzy sets [10,11].
The structure of an interval type-3 system is almost the same as for type-2 and type-1, and it is composed of a fuzzifier, rules, inference, type reduction and defuzzifier [38]. In Figure 6 we show the structure of an interval IT3 system [4,6].
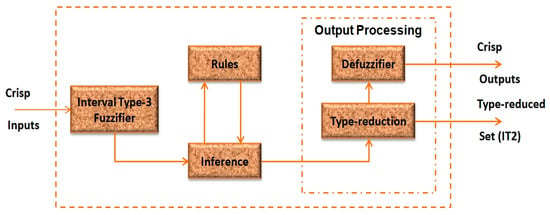
Figure 6.
Structure of an interval type-3 system.
In the next section, we explain the usefulness of interval type-3 fuzzy as we illustrate the design method and also show the improvements in results compared to type-1 and type-2 systems.
4. Simulation Results
We developed our own toolbox for type-3 fuzzy systems to implement the fuzzy rules for automated tuning of televisions. A fuzzy system with three inputs and one output was utilized. The inputs are the voltage, current intensity, and time, and the output is the image quality. We use the Mamdani inference and Gaussian MFs. The fuzzy system was designed by reducing the knowledge of human experts to a system of 14 rules. The block diagram of the system is illustrated in Figure 7.
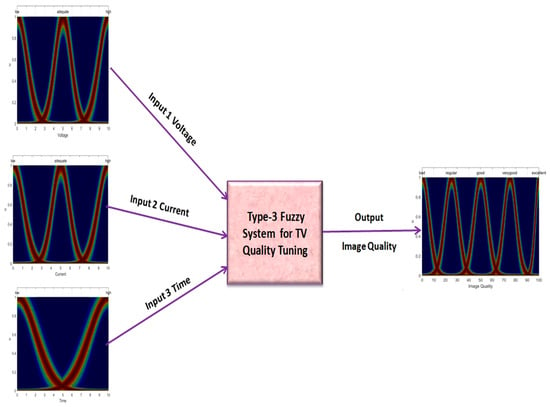
Figure 7.
Structure of interval type-3 fuzzy for TV image quality tuning.
We show in Table 1 the rule base for automated tuning of televisions that encapsulates the knowledge of the experts in image tuning. In Table 2, the parameters of the MFs utilized in the inputs and output are presented. The parameters shown in Table 2 were determined by empirical knowledge of experts combined with a trial-and-error approach, but in the future, these could be optimized to improve results even more. At this stage of the research we considered three membership functions for several reasons: (1) according to experts this was reasonable for them and the fuzzy model was also understandable for them, (2) previous implementations of the fuzzy tuning (type-2 and type-1) of imaging systems have been carried out with three membership functions [23], so for comparative purposes we also needed to have three membership functions, and (3) in future work, we plan to consider changing and optimizing the number of membership functions, so that we investigate this issue more precisely.

Table 1.
Fuzzy rules for tuning control.
Table 2.
Parameter values for the Gaussian MFs used in the linguistic values.
A sample of the simulation results for 11 cases is shown in Table 3, where we can see that the results from the fuzzy system are close to the real values provided by the experts (in this case two experts were consulted because of the availability of experts at the real plant). In Figure 8, Figure 9 and Figure 10, the MFs of the inputs (voltage, current intensity and time) are presented. We depict in Figure 11 the MFs for the output of the system. The design of the membership functions was based on the original definitions that were utilized for type-1 and type-2 in [23]. Finally, we illustrate, in Figure 12 and Figure 13, two views of the surface of the fuzzy model.
Table 3.
Simulation results for a sample of cases.
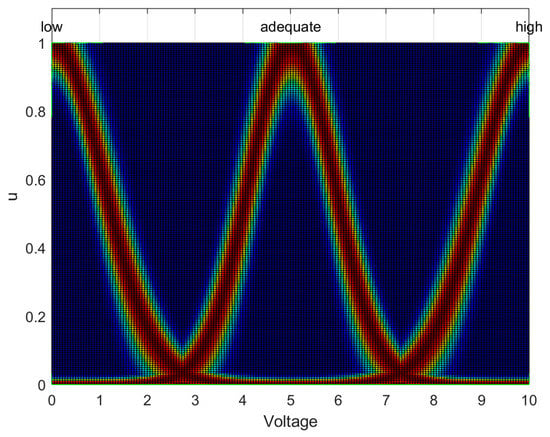
Figure 8.
Input MFs of the electric voltage variable.
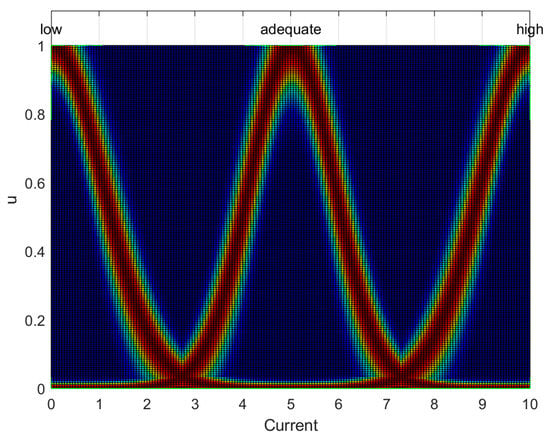
Figure 9.
Input MFs of the electric current intensity variable.
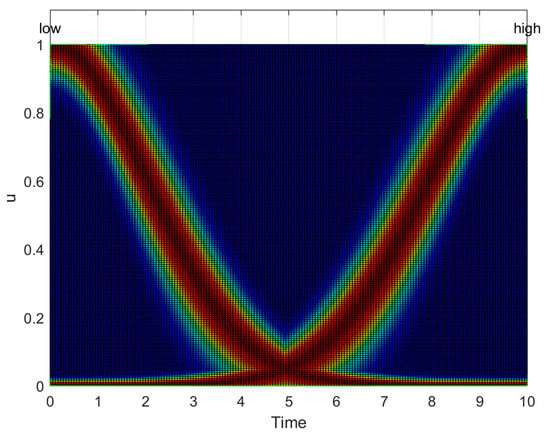
Figure 10.
Input MFs of the time linguistic variable.
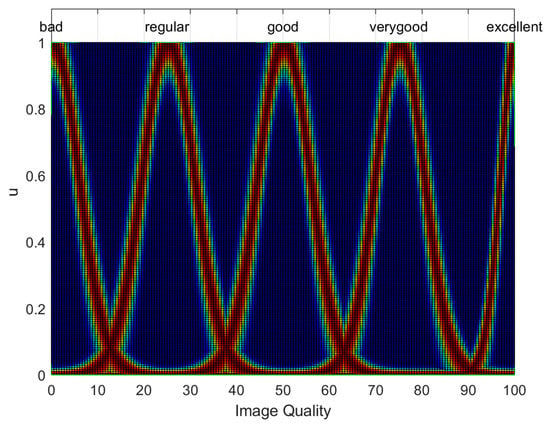
Figure 11.
Output MFs of the image quality variable.
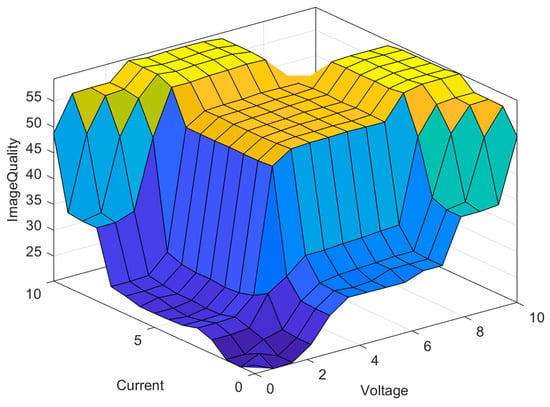
Figure 12.
3-D view of the model surface with respect to current intensity and voltage.
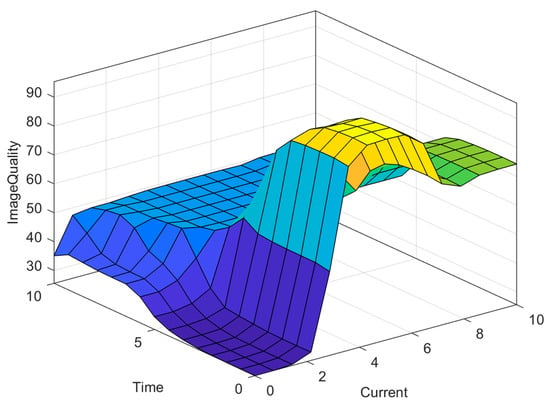
Figure 13.
3-D view of the model surface with respect to current intensity and time.
From Table 3 we can notice that the image quality achieved with type-3 fuzzy is closer to the expert evaluation when compared to general type-2 (GT2), interval type-2 (IT2) and type-1 (T1).
Figure 12 and Figure 13 provide a graphical representation of the fuzzy model. Two figures are needed because we have, in total, four variables, so we need to show two different views of the model. In Figure 12, we can appreciate the influence of current intensity and voltage on the image quality, and this can be viewed as showing all possible image quality outputs for different combinations of the input values. In Figure 13, we also show, in a similar way, the influence of time and current intensity on the image quality.
5. Conclusions
We have described in this article an intelligent system utilizing type-3 fuzzy logic for the tuning of the imaging system of televisions. We have shown in Section 2 the concepts of interval type-3. Then, in Section 3 the basic terminology involved in Mamdani type-3 fuzzy systems was presented. Section 4 then described how to use type-3 fuzzy techniques for automating the tuning of televisions and illustrated its validity with simulations. The tuning problem can be defined as controlling the imaging system of the television to meet quality standards. Previously, this process has been carried out by experts, by manually adjusting the imaging system of televisions on production lines. In the approach proposed here, we utilize an interval type-3 fuzzy system to automate this tuning process. The fuzzy system was designed to control the tuning, so that the imaging system meets quality requirements. An intelligent system was implemented based on type-3 fuzzy control and produced good simulation results. The validation of the type-3 fuzzy approach was made by comparing its results with those of human experts in the process of electrical tuning of televisions. In most of the tests, the interval type-3 fuzzy system provided results closer to the human experts, when compared to type-2 and type-1 fuzzy approaches. We believe that these results are due to the fact that type-3 is able to handle in a better way the uncertainty involved in the tuning process of the imaging system. The main contribution of the article has been the application of the new concepts of interval type-3 to an interesting problem with relevance to the television manufacturing process. The main advantage of the proposal is the relative simplicity of building the fuzzy model based on expert knowledge, though this could be a disadvantage if there were a lack of experts concerning other problems or case studies. In future works, we plan to optimize the MFs of the system by using metaheuristic optimization techniques, in this way improving the results even more. In addition, the proposed type-3 decision-making approach could be applied and tested in similar quality control problems [23] and classification systems [39,40].
Author Contributions
Conceptualization, creation of main idea, writing—review and editing, O.C.; formal analysis, J.R.C.; methodology and validation, P.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not Applicable.
Informed Consent Statement
Not Applicable.
Data Availability Statement
Not applicable.
Acknowledgments
We would like to thank TecNM and Conacyt for their support during the realization of this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cao, Y.; Raise, A.; Mohammadzadeh, A.; Rathinasamy, S.; Band, S.S.; Mosavi, A. Deep learned recurrent type-3 fuzzy system: Application for renewable energy modeling/prediction. Energy Rep. 2021, 7, 8115–8127. [Google Scholar] [CrossRef]
- Turksen, I.B. From Type 1 to Full Type N Fuzzy System Models. J. Mult. Valued Log. Soft Comput. 2014, 22, 543–560. [Google Scholar]
- Qasem, S.N.; Ahmadian, A.; Mohammadzadeh, A.; Rathinasamy, S.; Pahlevanzadeh, B. A type-3 logic fuzzy system: Optimized by a correntropy based Kalman filter with adaptive fuzzy kernel size. Inform. Sci. 2021, 572, 424–443. [Google Scholar] [CrossRef]
- Rickard, J.T.; Aisbett, J.; Gibbon, G. Fuzzy Subsethood for Fuzzy Sets of Type-2 and Generalized Type-n. IEEE Trans. Fuzzy Syst. 2008, 17, 50–60. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Sabzalian, M.H.; Zhang, W. An Interval Type-3 Fuzzy System and a New Online Fractional-Order Learning Algorithm: Theory and Practice. IEEE Trans. Fuzzy Syst. 2019, 28, 1940–1950. [Google Scholar] [CrossRef]
- Liu, Z.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. A New Online Learned Interval Type-3 Fuzzy Control System for Solar Energy Management Systems. IEEE Access 2021, 9, 10498–10508. [Google Scholar] [CrossRef]
- Zadeh, L.A. The Concept of a Linguistic Variable and its Application to Approximate Reasoning. Inf. Sci. 1975, 8, 43–80. [Google Scholar] [CrossRef]
- Zadeh, L.A. Knowledge representation in Fuzzy Logic. IEEE Trans. Knowl. Data Eng. 1989, 1, 89. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy Logic. Computer 1998, 1, 83–93. [Google Scholar]
- Mendel, J.M. Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions; Prentice-Hall: Upper-Saddle River, NJ, USA, 2001. [Google Scholar]
- Mendel, J.M. Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Karnik, N.N.; Mendel, J.M. Operations on Type-2 Fuzzy Sets. Fuzzy Sets Syst. 2001, 122, 327–348. [Google Scholar] [CrossRef]
- Moreno, J.E.; Sanchez, M.A.; Mendoza, O.; Rodríguez-Díaz, A.; Castillo, O.; Melin, P.; Castro, J.R. Design of an interval Type-2 fuzzy model with justifiable uncertainty. Inf. Sci. 2020, 513, 206–221. [Google Scholar] [CrossRef]
- Mendel, J.M.; Hagras, H.; Tan, W.-W.; Melek, W.W.; Ying, H. Introduction to Type-2 Fuzzy Logic Control; Wiley and IEEE Press: Hoboken, NJ, USA, 2014. [Google Scholar]
- Olivas, F.; Valdez, F.; Castillo, O.; Melin, P. Dynamic parameter adaptation in particle swarm optimization using interval type-2 fuzzy logic. Soft Comput. 2016, 20, 1057–1070. [Google Scholar] [CrossRef]
- Sakalli, A.; Kumbasar, T.; Mendel, J.M. Towards Systematic Design of General Type-2 Fuzzy Logic Controllers: Analysis, Interpretation, and Tuning. IEEE Trans. Fuzzy Syst. 2021, 29, 226–239. [Google Scholar] [CrossRef]
- Ontiveros, E.; Melin, P.; Castillo, O. High order α-planes integration: A new approach to computational cost reduction of General Type-2 Fuzzy Systems. Eng. Appl. Artif. Intell. 2018, 74, 186–197. [Google Scholar] [CrossRef]
- Castillo, O.; Amador-Angulo, L. A generalized type-2 fuzzy logic approach for dynamic parameter adaptation in bee colony optimization applied to fuzzy controller design. Inf. Sci. 2018, 460-461, 476–496. [Google Scholar] [CrossRef]
- Precup, R.-E.; Preitl, S.; Petriu, E.; Bojan-Dragos, C.-A.; Szedlak-Stinean, A.-I.; Roman, R.-C.; Hedrea, E.-L. Model-based fuzzy control results for networked control systems. Rep. Mech. Eng. 2020, 1, 10–25. [Google Scholar] [CrossRef]
- Precup, R.-E.; Preitl, S.; Petriu, E.M.; Roman, R.-C.; Bojan-Dragos, C.-A.; Hedrea, E.-L.; Szedlak-Stinean, A.-I. A center manifold theory-based approach to the stability analysis of state feedback takagi-sugeno-kang fuzzy control systems. Facta Univ. Ser. Mech. Eng. 2020, 18, 189. [Google Scholar] [CrossRef]
- Vilela, M.; Oluyemi, G.; Andrei, P. A holistic approach to assessment of value of information (VOI) with fuzzy data and decision criteria. Decis. Mak. Appl. Manag. Eng. 2020, 3, 97–118. [Google Scholar] [CrossRef]
- Castillo, O. Towards Finding the Optimal n in Designing Type-n Fuzzy Systems for Particular Classes of Problems: A Review. Appl. Comput. Math. 2018, 17, 3–9. [Google Scholar]
- Castillo, O.; Melin, P. Soft Computing and Fractal Theory for Intelligent Manufacturing; Springer: Heidelberg, Germany, 2003. [Google Scholar] [CrossRef]
- Rickard, J.T.; Aisbett, J.; Gibbon, G.; Morgenthaler, D. Fuzzy subsethood for type-n fuzzy sets. In Proceedings of the NAFIPS 2008—2008 Annual Meeting of the North American Fuzzy Information Processing Society, New York, NY, USA, 19–22 May 2008; pp. 1–6. [Google Scholar]
- Singh, D.; Verma, N.K.; Ghosh, A.K.; Malagaudanavar, A.K. An Approach Towards the Design of Interval Type-3 T-S Fuzzy System. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Wang, J.-H.; Tavoosi, J.; Mohammadzadeh, A.; Mobayen, S.; Asad, J.H.; Assawinchaichote, W.; Vu, M.T.; Skruch, P. Non-Singleton Type-3 Fuzzy Approach for Flowmeter Fault Detection: Experimental Study in a Gas Industry. Sensors 2021, 21, 7419. [Google Scholar] [CrossRef] [PubMed]
- Alattas, K.A.; Mohammadzadeh, A.; Mobayen, S.; Aly, A.A.; Felemban, B.F.; Vu, M.T. A New Data-Driven Control System for MEMSs Gyroscopes: Dynamics Estimation by Type-3 Fuzzy Systems. Micromachines 2021, 12, 1390. [Google Scholar] [CrossRef] [PubMed]
- Tian, M.-W.; Mohammadzadeh, A.; Tavoosi, J.; Mobayen, S.; Asad, J.H.; Castillo, O.; Várkonyi-Kóczy, A.R. A Deep-learned Type-3 Fuzzy System and Its Application in Modeling Problems. Acta Polytech. Hung. 2022, 19, 151–172. [Google Scholar] [CrossRef]
- Ma, C.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. Optimal Type-3 Fuzzy System for Solving Singular Multi-Pantograph Equations. IEEE Access 2020, 8, 225692–225702. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Mohammadzadeh, A.; Farsizadeh, H.; Khooban, M.-H. Stabilization of 5G Telecom Converter-Based Deep Type-3 Fuzzy Machine Learning Control for Telecom Applications. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 544–548. [Google Scholar] [CrossRef]
- Vafaie, R.H.; Mohammadzadeh, A.; Piran, J. A new type-3 fuzzy predictive controller for MEMS gyroscopes. Nonlinear Dyn. 2021, 106, 381–403. [Google Scholar] [CrossRef]
- Tian, M.-W.; Yan, S.-R.; Mohammadzadeh, A.; Tavoosi, J.; Mobayen, S.; Safdar, R.; Assawinchaichote, W.; Vu, M.T.; Zhilenkov, A. Stability of Interval Type-3 Fuzzy Controllers for Autonomous Vehicles. Mathematics 2021, 9, 2742. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Castillo, O.; Band, S.S.; Mosavi, A. A Novel Fractional-Order Multiple-Model Type-3 Fuzzy Control for Nonlinear Systems with Unmodeled Dynamics. Int. J. Fuzzy Syst. 2021, 23, 1633–1651. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Mohammadzadeh, A.; Khooban, M. Model Predictive Control-Based Type-3 Fuzzy Estimator for Voltage Stabilization of DC Power Converters. IEEE Trans. Ind. Electron. 2021. [Google Scholar] [CrossRef]
- Taghieh, A.; Aly, A.A.; Felemban, B.F.; Althobaiti, A.; Mohammadzadeh, A.; Bartoszewicz, A. A Hybrid Predictive Type-3 Fuzzy Control for Time-Delay Multi-Agent Systems. Electronics 2021, 11, 63. [Google Scholar] [CrossRef]
- Yan, S.; Aly, A.A.; Felemban, B.F.; Gheisarnejad, M.; Tian, M.; Khooban, M.H.; Mohammadzadeh, A.; Mobayen, S. A New Event-Triggered Type-3 Fuzzy Control System for Multi-Agent Systems: Optimal Economic Efficient Approach for Actuator Activating. Electronics 2021, 10, 3122. [Google Scholar] [CrossRef]
- Nabipour, N.; Qasem, S.N.; Jermsittiparsert, K. Type-3 fuzzy voltage management in PV/Hydrogen fuel cell/battery hybrid systems. Int. J. Hydrogen Energy 2020, 45, 32478–32492. [Google Scholar] [CrossRef]
- Castillo, O.; Castro, J.R.; Melin, P. Interval Type-3 Fuzzy Systems: Theory and Design; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar] [CrossRef]
- Naderipour, M.; Zarandi, M.H.F.; Bastani, S. A fuzzy cluster-validity index based on the topology structure and node attribute in complex networks. Expert Syst. Appl. 2021, 187, 115913. [Google Scholar] [CrossRef]
- Kalhori, M.R.N.; Zarandi, M.H.F. A new interval type-2 fuzzy reasoning method for classification systems based on normal forms of a possibility-based fuzzy measure. Inf. Sci. 2021, 581, 567–586. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).