
Dynamic System Roughening from Mineral to Tectonic Plate Scale: Similarities Between Stylolites and Mid-Ocean Ridges


Abstract
1. Introduction
2. Methods
2.1. Numerical Model for Stylolite Simulation
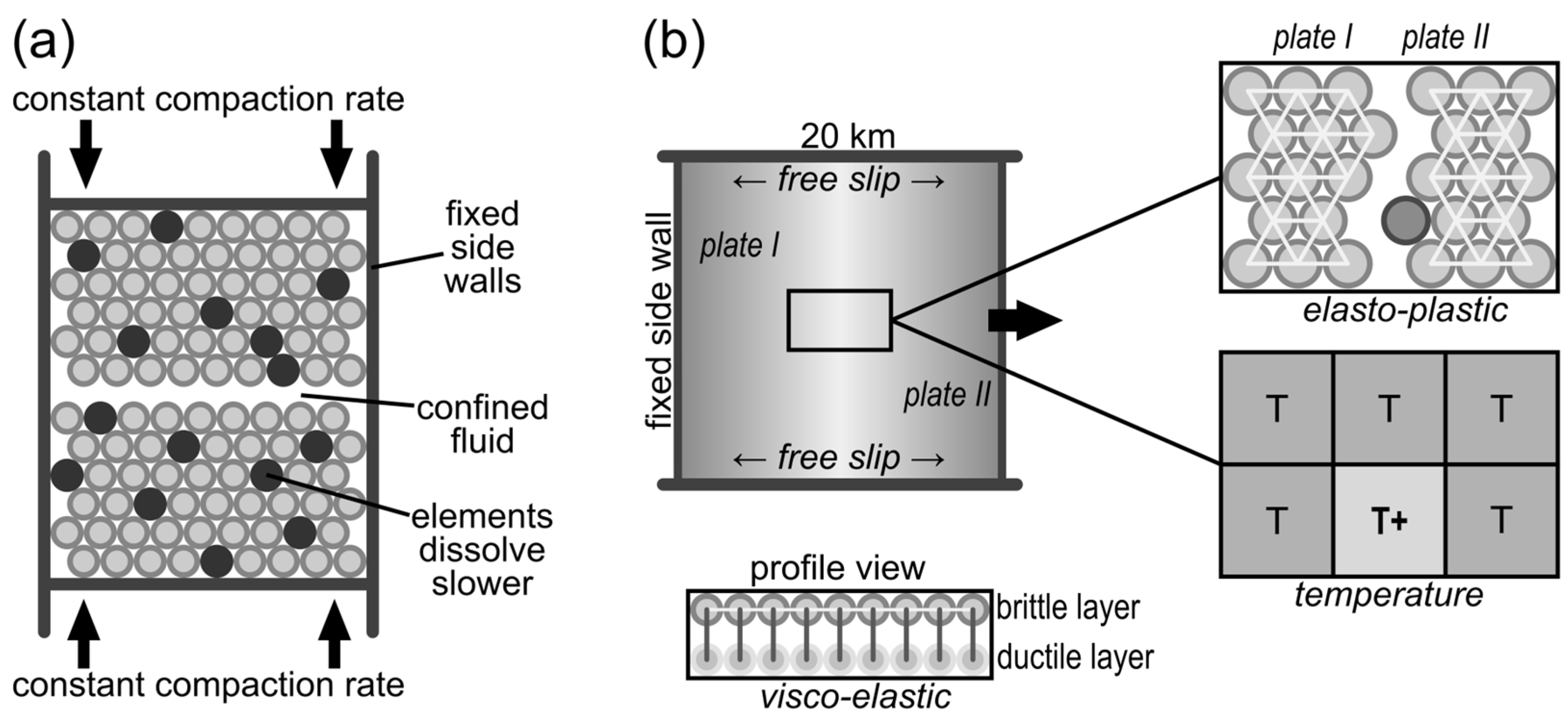
- Movement application: The system is stressed by incrementally displacing the upper and lower boundaries inward.
- Dissolution calculation: The dissolution rate is evaluated for all elements at the interface, and the element with the highest probability of dissolving is removed.
- Stress redistribution: After element removal, stresses are recalculated to achieve a new equilibrium configuration.
- Iterative Process: Steps 1 to 3 are repeated, progressively roughening the interface.
2.2. Numerical Model for MOR and Transform Fault Simulation
2.3. Scaling of Dynamic Systems
3. Results
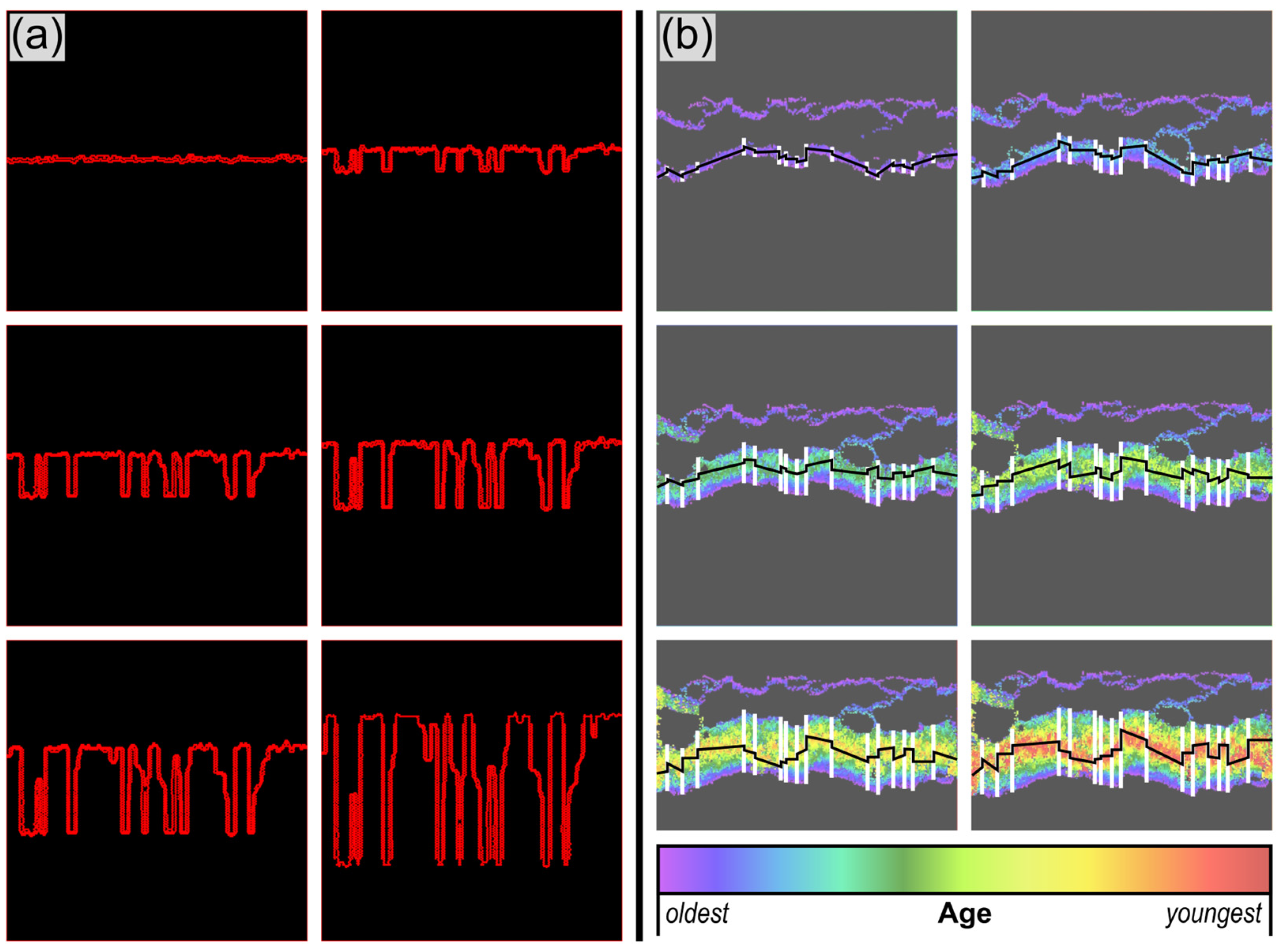
3.1. Simulations of Orthogonal Structures in Stylolites and Ridges
3.2. Scaling Analysis
4. Discussion
4.1. Self-Affine Scaling of MORs and Stylolites
4.2. Kinematic Faults and Their Stability
5. Conclusions
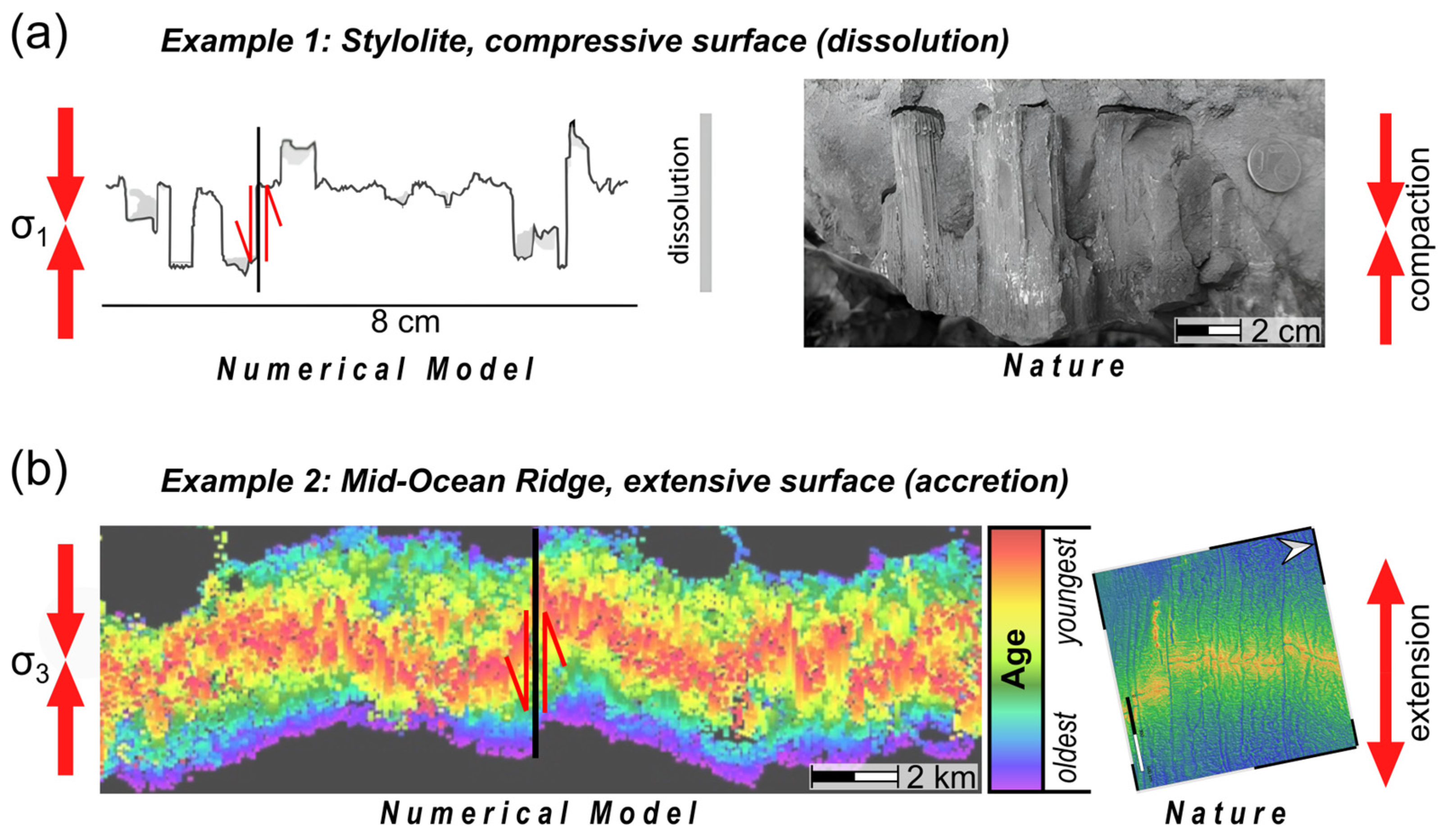
- The development of transform faults in MORs can be seen as part of a dynamic roughening process, much like the stylolite growth at the mineral scale.
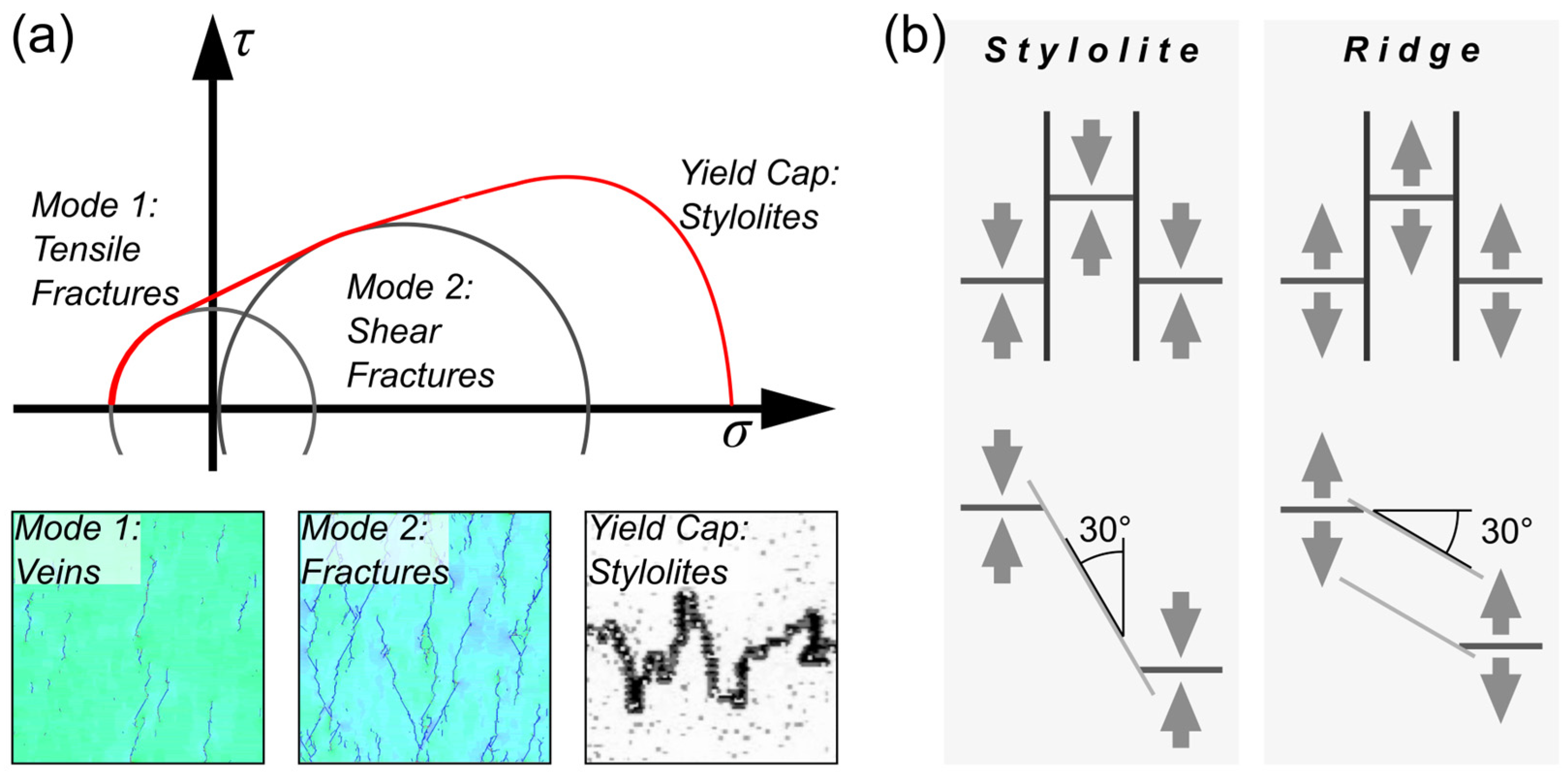
- Transform faults and sides of stylolite teeth are similar and represent kinematic faults. These faults do not contain shear stresses and do not follow the Mohr–Coulomb theory since they are not created as a function of stress but as a function of relative movement.
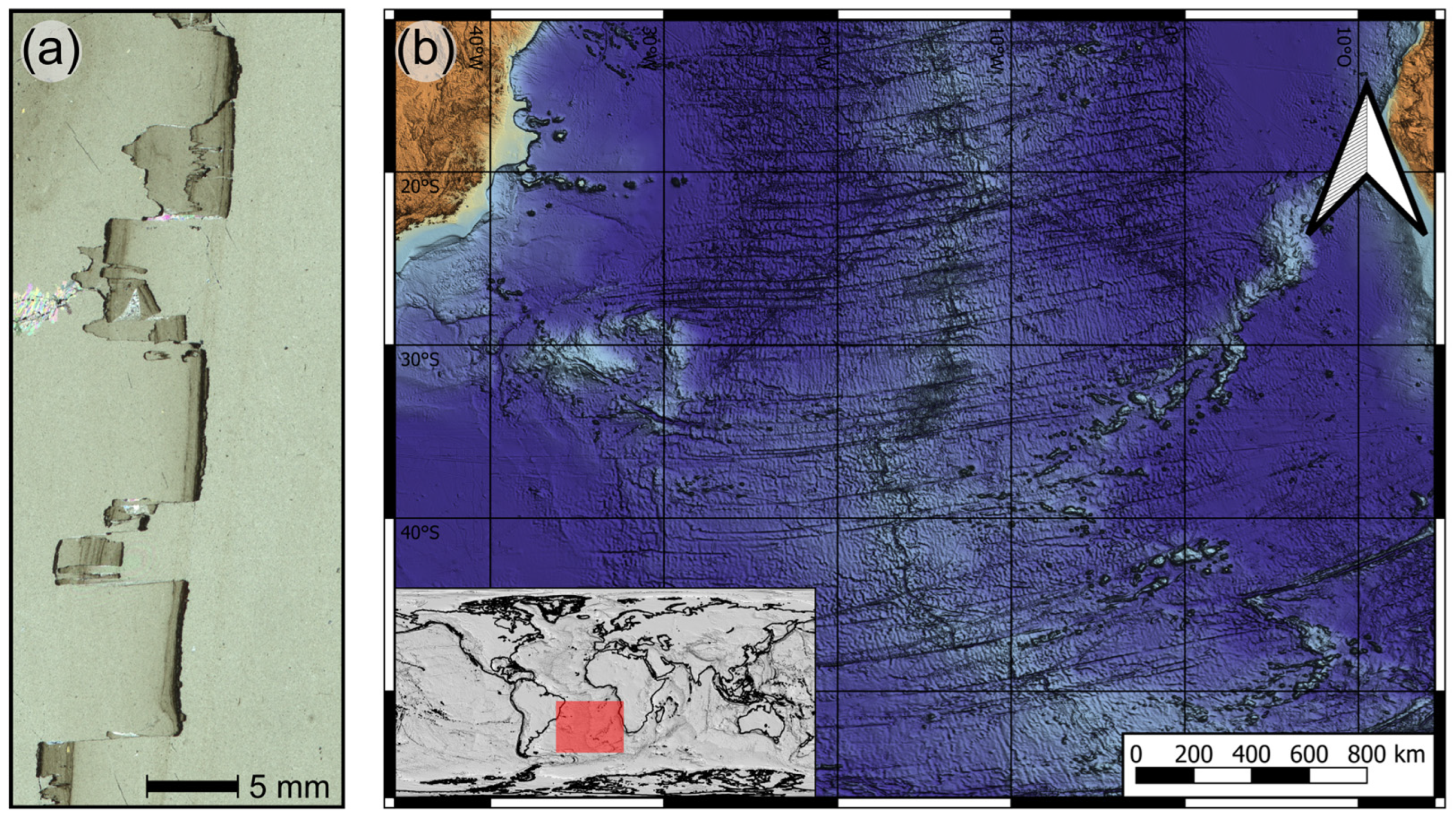
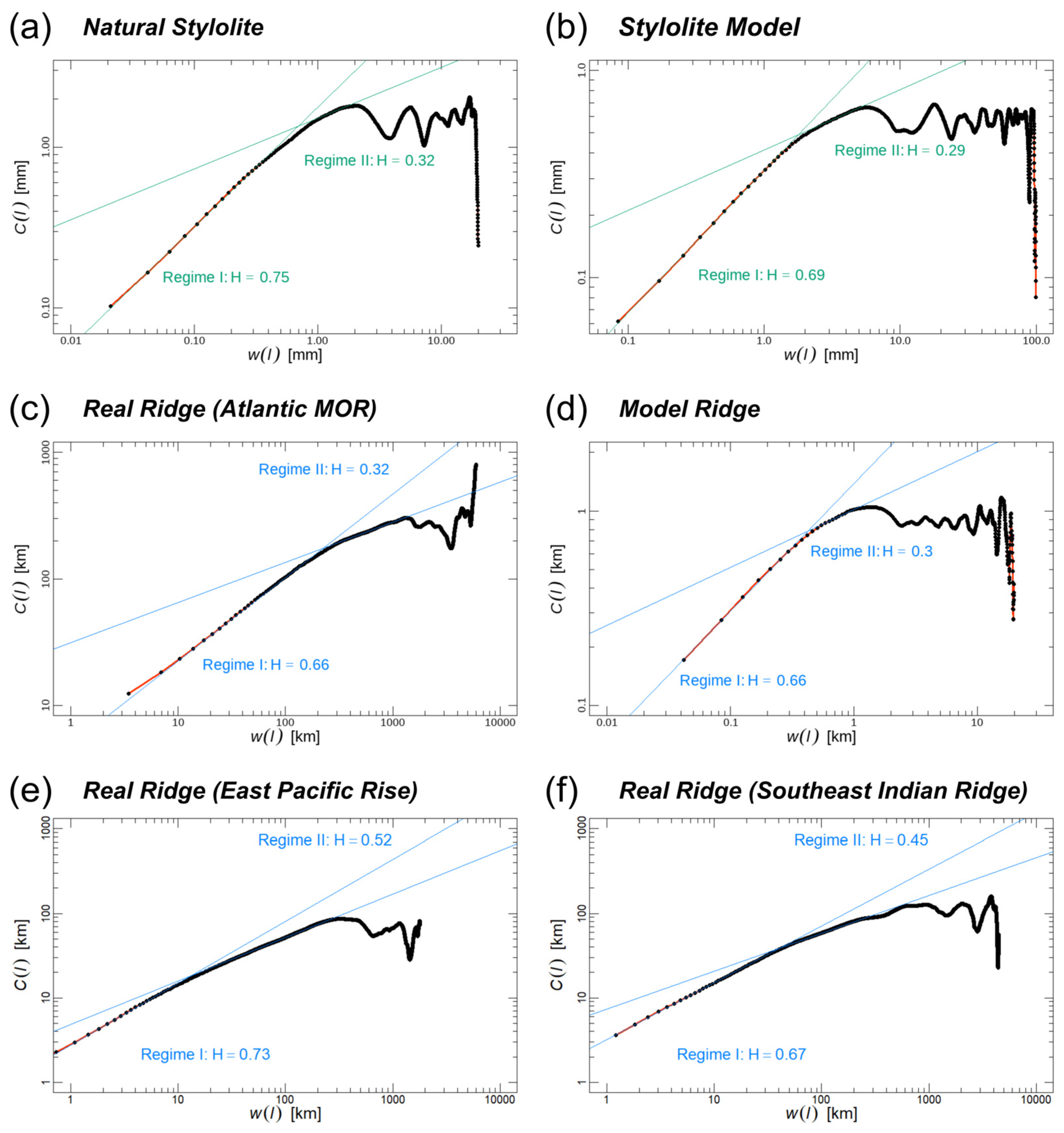
- MORs and stylolites exhibit self-affine scaling properties. This means that the spacing between oceanic transforms associated with MORs does not have a characteristic spacing, but a fractal, much like the fractal scaling of stylolite roughness. The South Atlantic MOR shows a scale transition around 200 to 300 km.
- Simulated and natural MORs and stylolites show two self-affine scaling regimes with different roughness exponents, a higher exponent at smaller scales that transitions to a lower exponent at larger scales. These different regimes should represent the dominance of physical processes at different scales (which are well known for stylolites).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Barabási, A.-L.; Stanley, H.E. Fractal Concepts in Surface Growth; Cambridge University Press: Cambridge, UK, 2009; ISBN 9780511599798. [Google Scholar]
- Laronne Ben-Itzhak, L.; Aharonov, E.; Toussaint, R.; Sagy, A. Upper bound on stylolite roughness as indicator for amount of dissolution. Earth Planet. Sci. Lett. 2012, 337–338, 186–196. [Google Scholar] [CrossRef]
- Toussaint, R.; Aharonov, E.; Koehn, D.; Gratier, J.-P.; Ebner, M.; Baud, P.; Rolland, A.; Renard, F. Stylolites: A review. J. Struct. Geol. 2018, 114, 163–195. [Google Scholar] [CrossRef]
- Koehn, D.; Koehler, S.; Toussaint, R.; Ghani, I.; Stollhofen, H. Scaling analysis, correlation length and compaction estimates of natural and simulated stylolites. J. Struct. Geol. 2022, 161, 104670. [Google Scholar] [CrossRef]
- Power, W.L.; Tullis, T.E. Euclidean and fractal models for the description of rock surface roughness. JGR Solid Earth 1991, 96, 415–424. [Google Scholar] [CrossRef]
- Renard, F.; Schmittbuhl, J.; Gratier, J.-P.; Meakin, P.; Merino, E. Three-dimensional roughness of stylolites in limestones. JGR Solid Earth 2004, 109, B3. [Google Scholar] [CrossRef]
- Schmittbuhl, J.; Renard, F.; Gratier, J.P.; Toussaint, R. Roughness of stylolites: Implications of 3D high resolution topography measurements. Phys. Rev. Lett. 2004, 93, 238501. [Google Scholar] [CrossRef] [PubMed]
- Koehn, D.; Renard, F.; Toussaint, R.; Passchier, C.W. Growth of stylolite teeth patterns depending on normal stress and finite compaction. Earth Planet. Sci. Lett. 2007, 257, 582–595. [Google Scholar] [CrossRef]
- Aharonov, E.; Katsman, R. Interaction between pressure solution and clays in stylolite development: Insights from modeling. Am. J. Sci. 2009, 309, 607–632. [Google Scholar] [CrossRef]
- Koehn, D.; Rood, M.P.; Beaudoin, N.; Chung, P.; Bons, P.D.; Gomez-Rivas, E. A new stylolite classification scheme to estimate compaction and local permeability variations. Sediment. Geol. 2016, 346, 60–71. [Google Scholar] [CrossRef]
- Olive, J.-A.; Dublanchet, P. Controls on the magmatic fraction of extension at mid-ocean ridges. Earth Planet. Sci. Lett. 2020, 549, 116541. [Google Scholar] [CrossRef]
- Zhou, D.; Li, C.-F.; Zlotnik, S.; Wang, J. Correlations between oceanic crustal thickness, melt volume, and spreading rate from global gravity observation. Mar. Geophys. Res. 2020, 41, 14. [Google Scholar] [CrossRef]
- Morgan, J.P.; Chen, Y.J. The genesis of oceanic crust: Magma injection, hydrothermal circulation, and crustal flow. JGR Solid Earth 1993, 98, 6283–6297. [Google Scholar] [CrossRef]
- Sempéré, J.-C.; Lin, J.; Brown, H.S.; Schouten, H.; Purdy, G.M. Segmentation and morphotectonic variations along a slow-spreading center: The Mid-Atlantic Ridge (24°00′ N–30°40′ N). Mar. Geophys. Res. 1993, 15, 153–200. [Google Scholar] [CrossRef]
- Choi, E.; Lavier, L.; Gurnis, M. Thermomechanics of mid-ocean ridge segmentation. Phys. Earth Planet. Inter. 2008, 171, 374–386. [Google Scholar] [CrossRef]
- Wilson, J.T. A New Class of Faults and their Bearing on Continental Drift. Nature 1965, 207, 343–347. [Google Scholar] [CrossRef]
- Gerya, T. Origin and models of oceanic transform faults. Tectonophysics 2012, 522–523, 34–54. [Google Scholar] [CrossRef]
- Murton, B.J.; Rona, P.A. Carlsberg Ridge and Mid-Atlantic Ridge: Comparison of slow spreading centre analogues. Deep. Sea Res. Part II Top. Stud. Oceanogr. 2015, 121, 71–84. [Google Scholar] [CrossRef]
- Bons, P.D.D.; Koehn, D.; Jessell, M.W. Microdynamics Simulation; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 9783540447931. [Google Scholar]
- Koehn, D.; Ebner, M.; Renard, F.; Toussaint, R.; Passchier, C.W. Modelling of stylolite geometries and stress scaling. Earth Planet. Sci. Lett. 2012, 341–344, 104–113. [Google Scholar] [CrossRef]
- Ghani, I.; Koehn, D.; Toussaint, R.; Passchier, C.W. Dynamic Development of Hydrofracture. Pure Appl. Geophys. 2013, 170, 1685–1703. [Google Scholar] [CrossRef]
- Family, F.; Vicsek, T. Scaling of the active zone in the Eden process on percolation networks and the ballistic deposition model. J. Phys. A Math. Gen. 1985, 18, L75–L81. [Google Scholar] [CrossRef]
- Ebner, M.; Toussaint, R.; Schmittbuhl, J.; Koehn, D.; Bons, P. Anisotropic scaling of tectonic stylolites: A fossilized signature of the stress field? JGR Solid Earth 2010, 115, B6. [Google Scholar] [CrossRef]
- Köhler, S.; Duschl, F.; Fazlikhani, H.; Koehn, D.; Stephan, T.; Stollhofen, H. Reconstruction of cyclic Mesozoic–Cenozoic stress development in SE Germany using fault-slip and stylolite inversion. Geol. Mag. 2022, 159, 2323–2345. [Google Scholar] [CrossRef]
- Beaudoin, N.; Lacombe, O.; Koehn, D.; David, M.-E.; Farrell, N.; Healy, D. Vertical stress history and paleoburial in foreland basins unravelled by stylolite roughness paleopiezometry: Insights from bedding-parallel stylolites in the Bighorn Basin, Wyoming, USA. J. Struct. Geol. 2020, 136, 104061. [Google Scholar] [CrossRef]
- Beaudoin, N.; Lacombe, O. Recent and future trends in paleopiezometry in the diagenetic domain: Insights into the tectonic paleostress and burial depth history of fold-and-thrust belts and sedimentary basins. J. Struct. Geol. 2018, 114, 357–365. [Google Scholar] [CrossRef]
- Ebner, M.; Piazolo, S.; Renard, F.; Koehn, D. Stylolite interfaces and surrounding matrix material: Nature and role of heterogeneities in roughness and microstructural development. J. Struct. Geol. 2010, 32, 1070–1084. [Google Scholar] [CrossRef]
- Rustichelli, A.; Tondi, E.; Agosta, F.; Cilona, A.; Giorgioni, M. Development and distribution of bed-parallel compaction bands and pressure solution seams in carbonates (Bolognano Formation, Majella Mountain, Italy). J. Struct. Geol. 2012, 37, 181–199. [Google Scholar] [CrossRef]
- Rustichelli, A.; Tondi, E.; Korneva, I.; Baud, P.; Vinciguerra, S.; Agosta, F.; Reuschlé, T. Bedding-parallel stylolites in shallow-water limestone successions of the Apulian Carbonate Platform (central-southern Italy). Ital. J. Geosci. 2015, 134, 513–534. [Google Scholar] [CrossRef]
- Schierjott, J.C.; Thielmann, M.; Rozel, A.B.; Golabek, G.J.; Gerya, T.V. Can Grain Size Reduction Initiate Transform Faults?—Insights From a 3-D Numerical Study. Tectonics 2020, 39, 10. [Google Scholar] [CrossRef]
- Langemeyer, S.M.; Lowman, J.P.; Tackley, P.J. Global mantle convection models produce transform offsets along divergent plate boundaries. Commun. Earth Environ. 2021, 2, 69. [Google Scholar] [CrossRef]
- Ito, G.; Dunn, R.A. Mid-Ocean Ridges: Mantle Convection and Formation of the Lithosphere. In Encyclopedia of Ocean Sciences; Elsevier: Amsterdam, The Netherlands, 2009; pp. 867–880. ISBN 9780123744739. [Google Scholar]
- Abercrombie, R.E.; Ekström, G. Earthquake slip on oceanic transform faults. Nature 2001, 410, 74–77. [Google Scholar] [CrossRef] [PubMed]
- Mittelstaedt, E.; Ito, G.; Behn, M.D. Mid-ocean ridge jumps associated with hotspot magmatism. Earth Planet. Sci. Lett. 2008, 266, 256–270. [Google Scholar] [CrossRef]
- Wei, J.; Dai, S.; Cheng, H.; Wang, H.; Wang, P.; Li, F.; Xie, Z.; Zhu, R. Review of Asymmetric Seafloor Spreading and Oceanic Ridge Jumps in the South China Sea. J. Mar. Sci. Eng. 2024, 12, 408. [Google Scholar] [CrossRef]
- Harper, H.; Luttrell, K.; Sandwell, D.T. Ridge Propagation and the Stability of Small Mid-Ocean Ridge Offsets. J. Geophys. Res. Solid Earth 2023, 128, 8. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Abbreviation | Value | Unit |
|---|---|---|---|
| Molecular volume of calcite | V | 4 × 10−5 | m3 mol−1 |
| Young’s modulus | E | 40 | GPa |
| Poisson’s ratio | λ | 0.33 | - |
| Surface free energy | γ | 0.27 | J m−2 |
| Dissolution rate constant | Di | 10−4 | mol (m−2 s−1) |
| Universal gas constant | R | 8.3145 | J mol−1 K−1 |
| Temperature | T | 500 | K |
| Width of the system | - | 10 | mm |
| Elements in x-direction | - | 50, 100, 200, 400 | - |
| Area of Application | Parameter | Value | Unit |
|---|---|---|---|
| Overall model | Starting Grid Size | 200 × 230 | Elements |
| Real Model Dimension | 20 × 20 | km | |
| Real Element Diameter | 100 | m | |
| Extension Rate | 5 | cm year−1 | |
| Elastic grid | Young’s Modulus | 6–60 | GPa |
| Breaking Strength | 1–10 | MPa | |
| Visco-elastic-sheet | Young’s Modulus | 6–60 | GPa |
| Viscosity | 1018–1020 | Pa s−1 | |
| Thermo-mechanical coupling | Healing Probability | 0.01 | year−1 |
| kb | 1.38 × 10−23 | m2 kg s−2 K−1 | |
| Eb | ~10−21 | m2 kg s−2 | |
| Weakening Factor a | 0.2 | - | |
| EB | 10−22 | m2 kg s−2 | |
| Temperature | Grid Space | 200 | m |
| Background Temperature | 200 | °C | |
| Inserted Elements (Melt) T | 1200 | °C | |
| Ta | 20 | °C | |
| Tb | 1300 | °C | |
| Thermal Diffusivity κ | ~10−6 | m2 s−1 | |
| Heat Diffusion Coefficient | 10−6 | m2 s−1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hafermaas, D.; Köhler, S.; Koehn, D.; Toussaint, R. Dynamic System Roughening from Mineral to Tectonic Plate Scale: Similarities Between Stylolites and Mid-Ocean Ridges. Minerals 2025, 15, 743. https://doi.org/10.3390/min15070743
Hafermaas D, Köhler S, Koehn D, Toussaint R. Dynamic System Roughening from Mineral to Tectonic Plate Scale: Similarities Between Stylolites and Mid-Ocean Ridges. Minerals. 2025; 15(7):743. https://doi.org/10.3390/min15070743
Chicago/Turabian StyleHafermaas, Daniel, Saskia Köhler, Daniel Koehn, and Renaud Toussaint. 2025. "Dynamic System Roughening from Mineral to Tectonic Plate Scale: Similarities Between Stylolites and Mid-Ocean Ridges" Minerals 15, no. 7: 743. https://doi.org/10.3390/min15070743
APA StyleHafermaas, D., Köhler, S., Koehn, D., & Toussaint, R. (2025). Dynamic System Roughening from Mineral to Tectonic Plate Scale: Similarities Between Stylolites and Mid-Ocean Ridges. Minerals, 15(7), 743. https://doi.org/10.3390/min15070743