1. Introduction
Fragmentation size is a key parameter to the efficiency of numerous mining operations that makes use of explosives across all of the stages of production from mine (drill, blasting, haulage, etc.) to mill (mineral processing). Several studies [
1,
2] going back to the late 1990s have explored this particular correlation. It is vital for companies, therefore, to monitor fragmentation size and make necessary changes to mine planning and execution. For the purpose of maintaining a consistent optimal fragmentation size, the blasting products must be monitored regularly, so that any necessary modifications to the drilling and blasting process can be made.
However, the rock is usually heterogeneous in nature, and a large amount of material is generally mined every day, so there are some difficulties in monitoring the fragmentation size distribution regularly using traditional methods. These traditional methods include manual sieving, boulder counting, and visual estimation. However, limitations on sampling and bias make these methods relatively inefficient [
3]. As such, there exists a need for a quick and accessible method of rock fragmentation size distribution determination that can surmount the limitations of physical sampling and laboratory analysis. A currently used digital solution to this problem is to employ image-based particle size analysis software.
Commercial products, such as WipFrag [
4], make use of images of a muckpile or orthomosaics to measure fragmentation size distribution. In addition, other 3D modelling technologies, such as lidar systems, have also been used in fragmentation measurement systems producing good results and accurate measurements without the need for scale objects.
A previous study [
5] was done using laser scanning to measure the blast fragmentation in rockpiles in a mine. While specialized equipment was used to do this study, lidar is becoming increasingly accessible in recent years, with newer generation smartphone models including a lidar system. The study recognizes that this is also a good alternative to perform fragmentation measurement as they are potentially effective in an underground setting where lighting is limited, an issue that produces problems for traditional image-based photogrammetry [
6].
In a previous study [
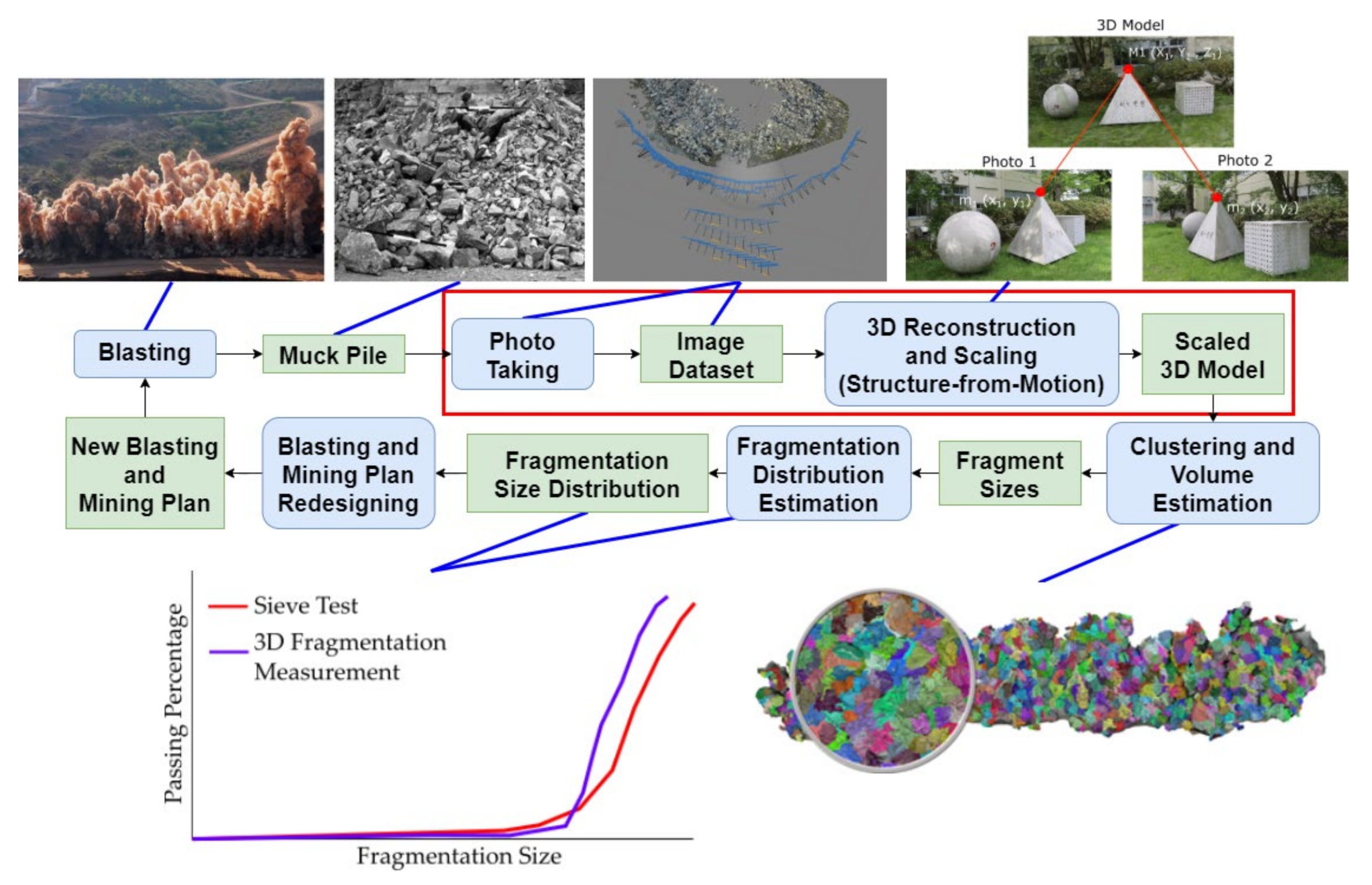
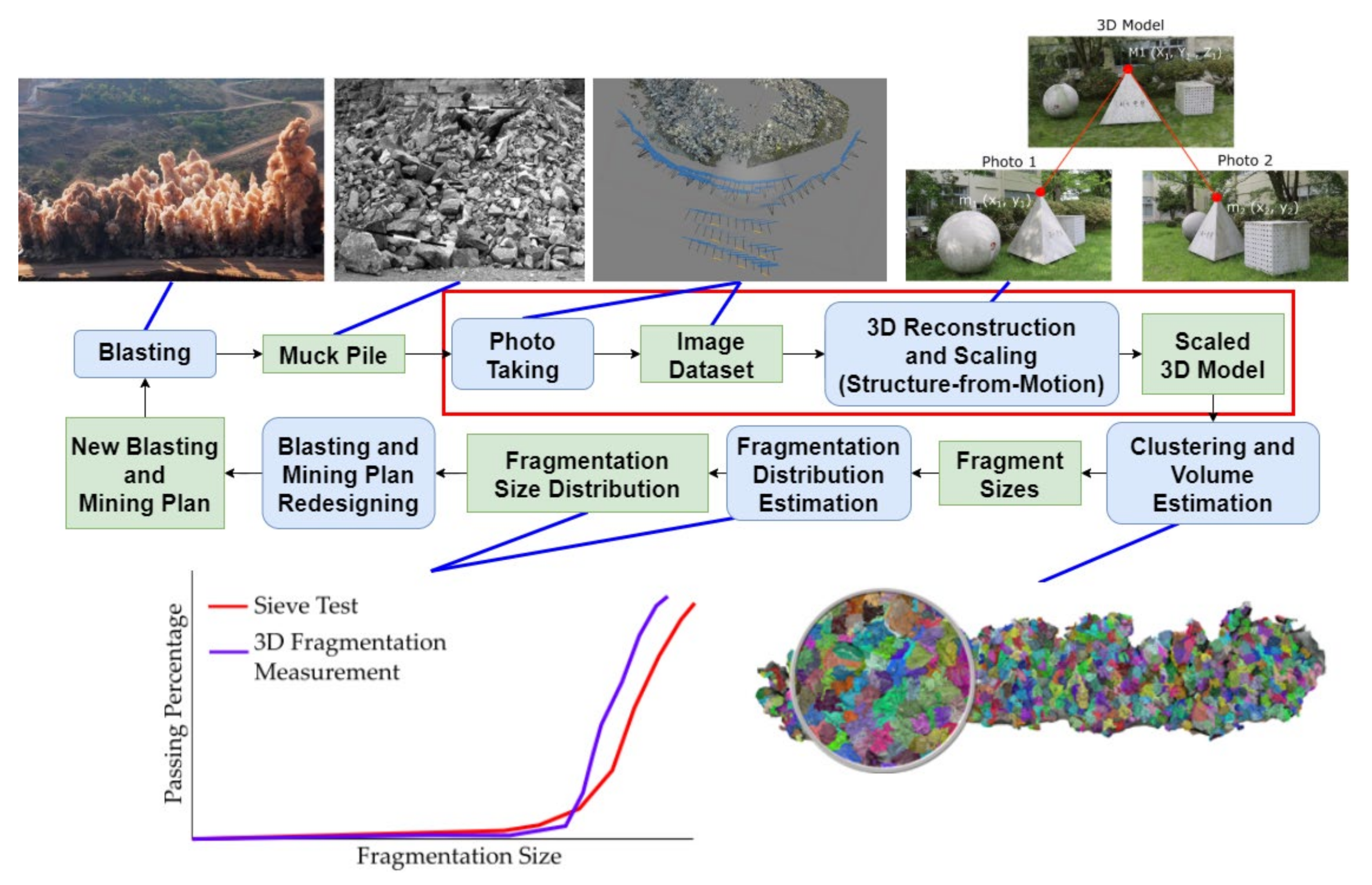
7], a 3-Dimensional Fragmentation Measurement (3DFM) system was developed that makes use of 3D Photogrammetry to measure particle size distribution at accuracies greater than that of conventional methods. A theoretical visualized workflow for this particular system when applied to a mining operation is shown in
Figure 1.
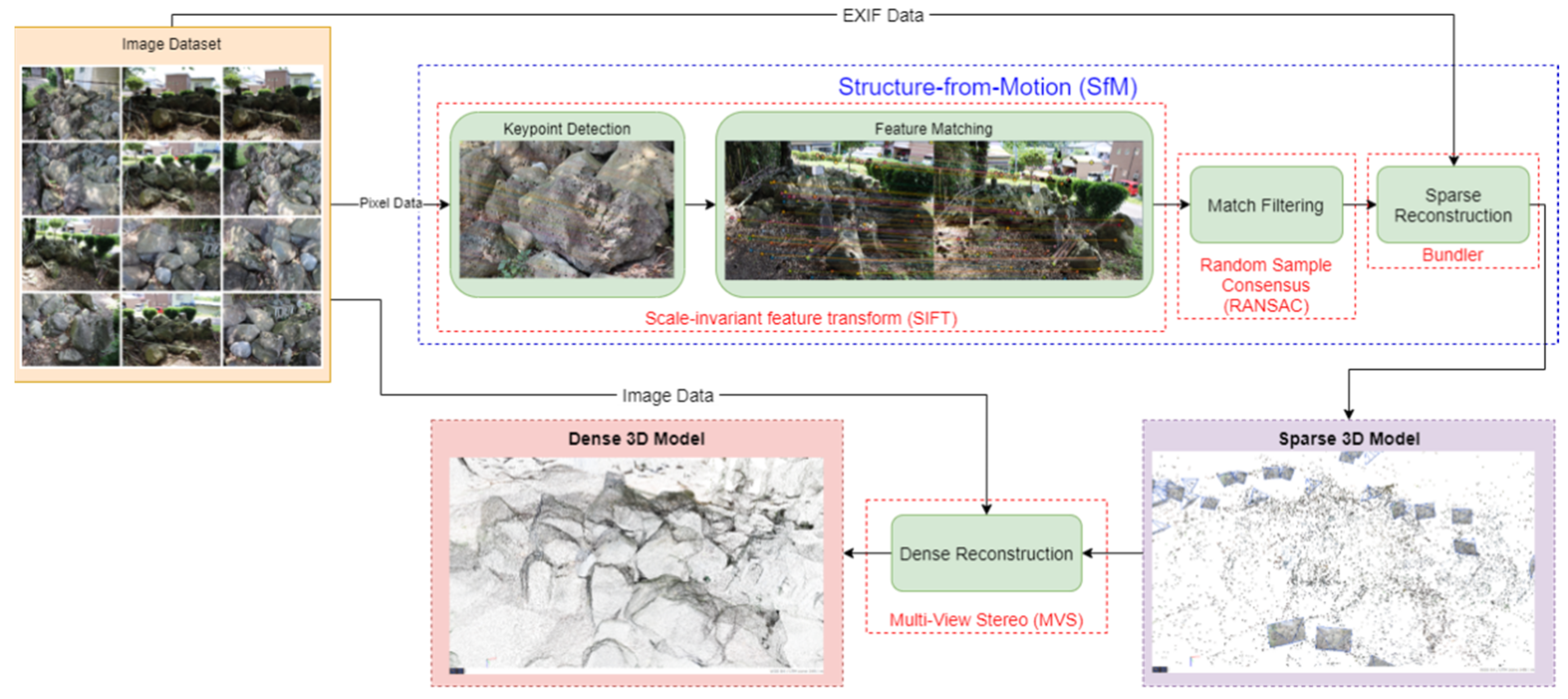
The developed system is divided into stages, utilizing multiple computational techniques in order to achieve its purpose. In a hypothetical application of the system, pictures of the muckpile from the products of blasting are taken. The sizes of muckpiles vary greatly depend on the specifications of the hauling equipment as well as the mine plan that the operation employs. In situations where the muckpile is too large or has parts that are inaccessible to photo-taking, it is possible for the system to reconstruct only a representative “slice” of the muckpile.
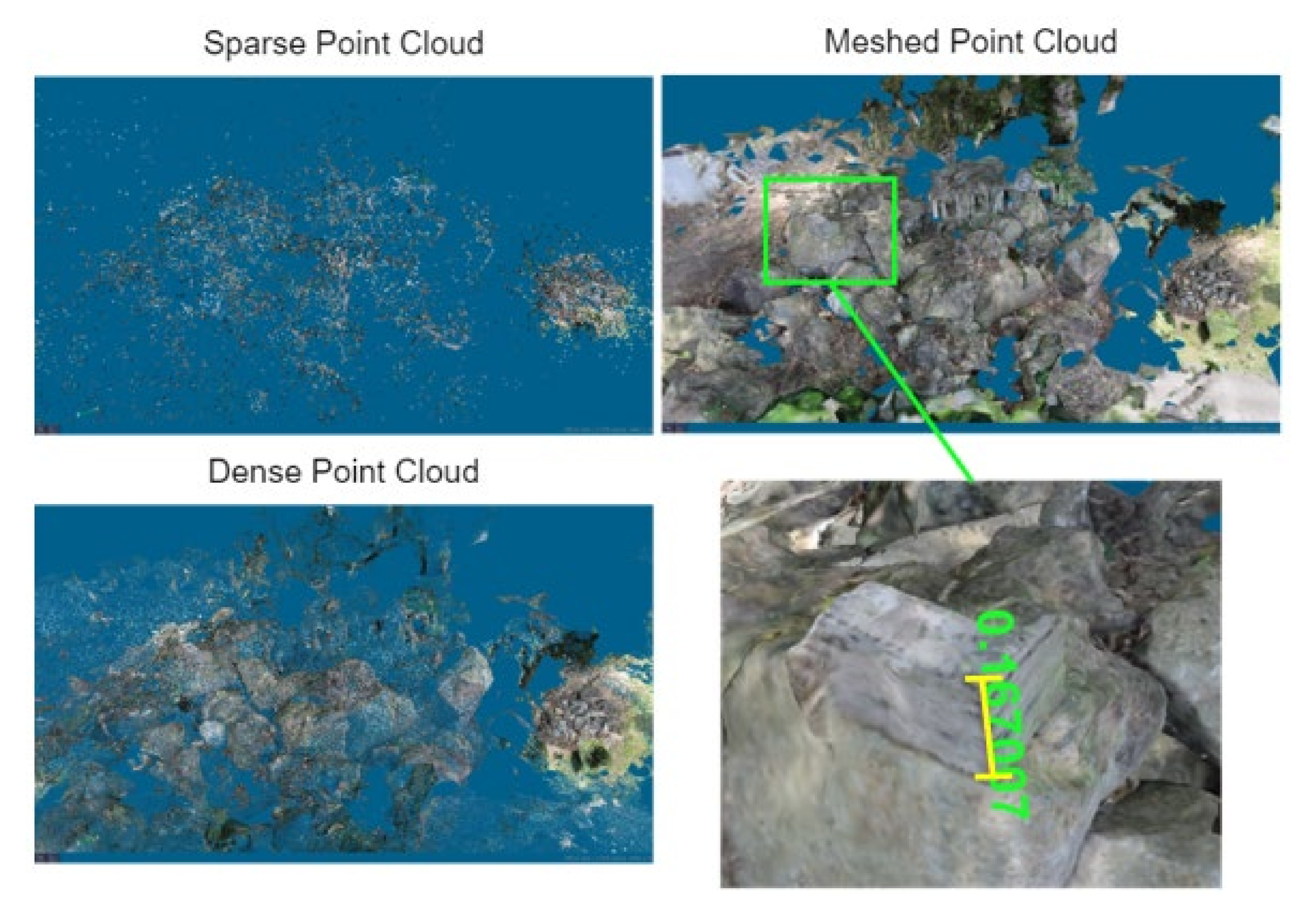
The images are then processed in a high-power computer by a sequence of 3D imaging techniques that will ultimately output a scaled 3D model of the muckpile in the form of a point cloud. A technique known as supervoxel clustering is then performed on the 3D model, which then undergoes supervoxel clustering in order to divide the individual fragments into segments whose dimensions have been calculated. The dimensional data can then be used in the computation of the fragment size distribution of the muckpile. Using this information, the blasting product can be judged if it is up to the expected specification. Adjustments are then made the blasting design, such as the amount and type of explosive and blasting patterns in order to achieve the required distribution.
This study focuses on the 3D model scaling aspect of this system, as highlighted with a red box in
Figure 1. Specifically, the research will analyze how positional data can affect scaling error when reconstructing using Structure-from-Motion. Scaling is a critical component of fragmentation size distribution measurement using photogrammetry as this will directly determine the accuracy of the size estimation. In creating a 3D model, extrinsic data, such as ground truths, are needed to create a properly-scaled reconstruction of the scene. Traditionally, scale is resolved in photogrammetry by placing scale bars in the scene or taking a measurement of two features and then scaling the generated model using that information.
The study proposes a method that makes use of GNSS (Global Navigation Satellite System) data to create scaled 3D models without the need for post-reconstruction rescaling. GNSS positional data, and its sub-systems, such as GPS, Beidou, GLONASS, and Japan’s own QZSS can be utilized. A previous study was performed with regards to using GPS in reconstruction but mostly in the context of UAV (Unmanned Aerial Vehicle) Mapping [
8]. This study aims to create a system that does not need ground truth data, such as GCPs (Ground Control Points) to create a properly scaled 3D model of a muckpile. This would aid greatly in the fragmentation size distribution measurement of muckpiles using photogrammetry.
It is a known fact that inherent error exists within GNSS and its subsets, and even high-end geodetic GNSS receivers have errors in the centimeter range [
9]. For this study, a smartphone was used as a GNSS receiver for the digital camera. This decision was due to the end-goal of this research, which is to be able use both image data and GNSS data from a smartphone, as this practicality can be important in a mining operation environment.
This comes at a drawback to the GNSS accuracy, as recreational grade GNSS chips, like those found in smartphones, typically have errors in the meter range [
10]. To overcome this error, the study proposes to make use of an increasing number of georeferenced images to statistically decrease the scaling error of the constructed 3D model.
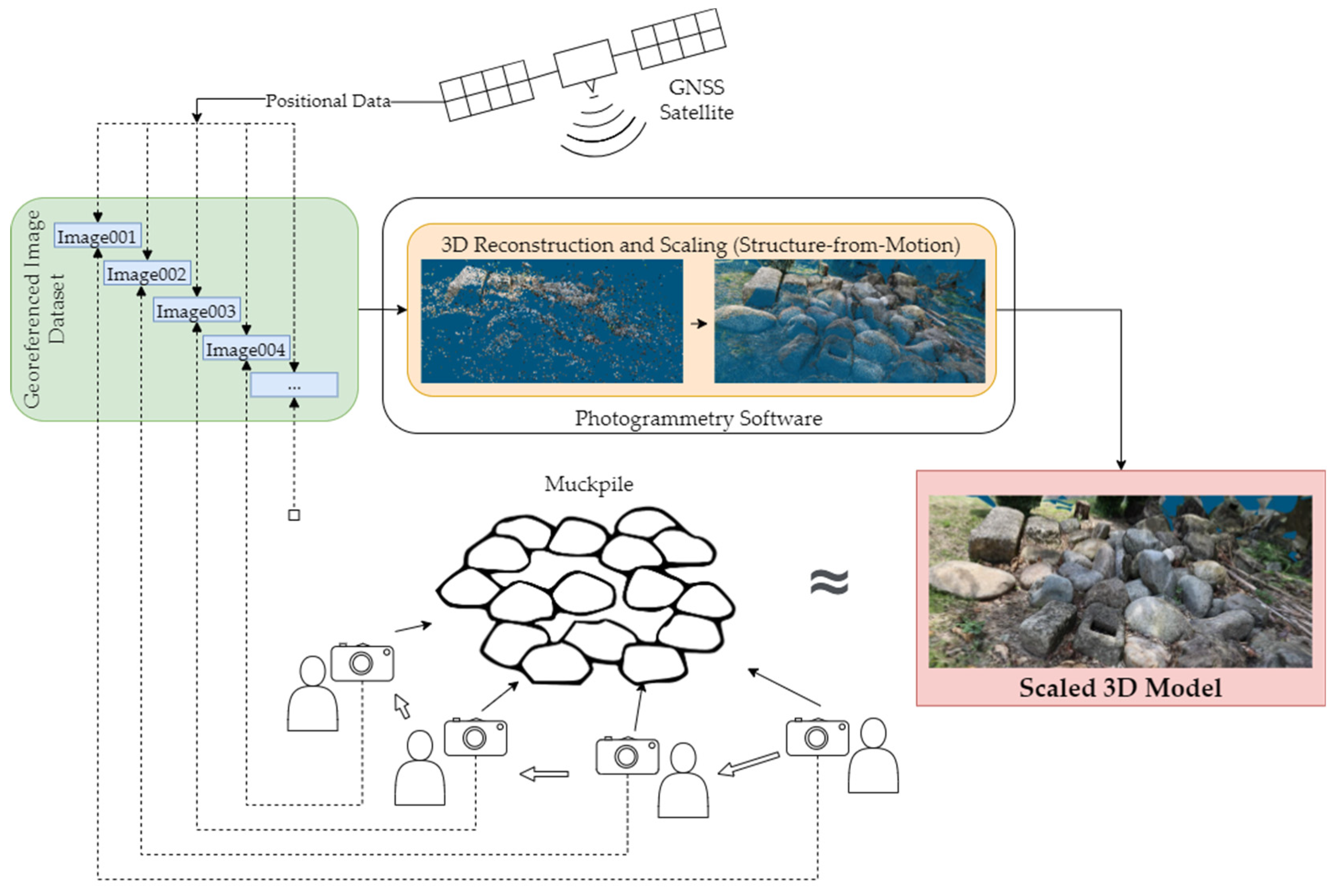
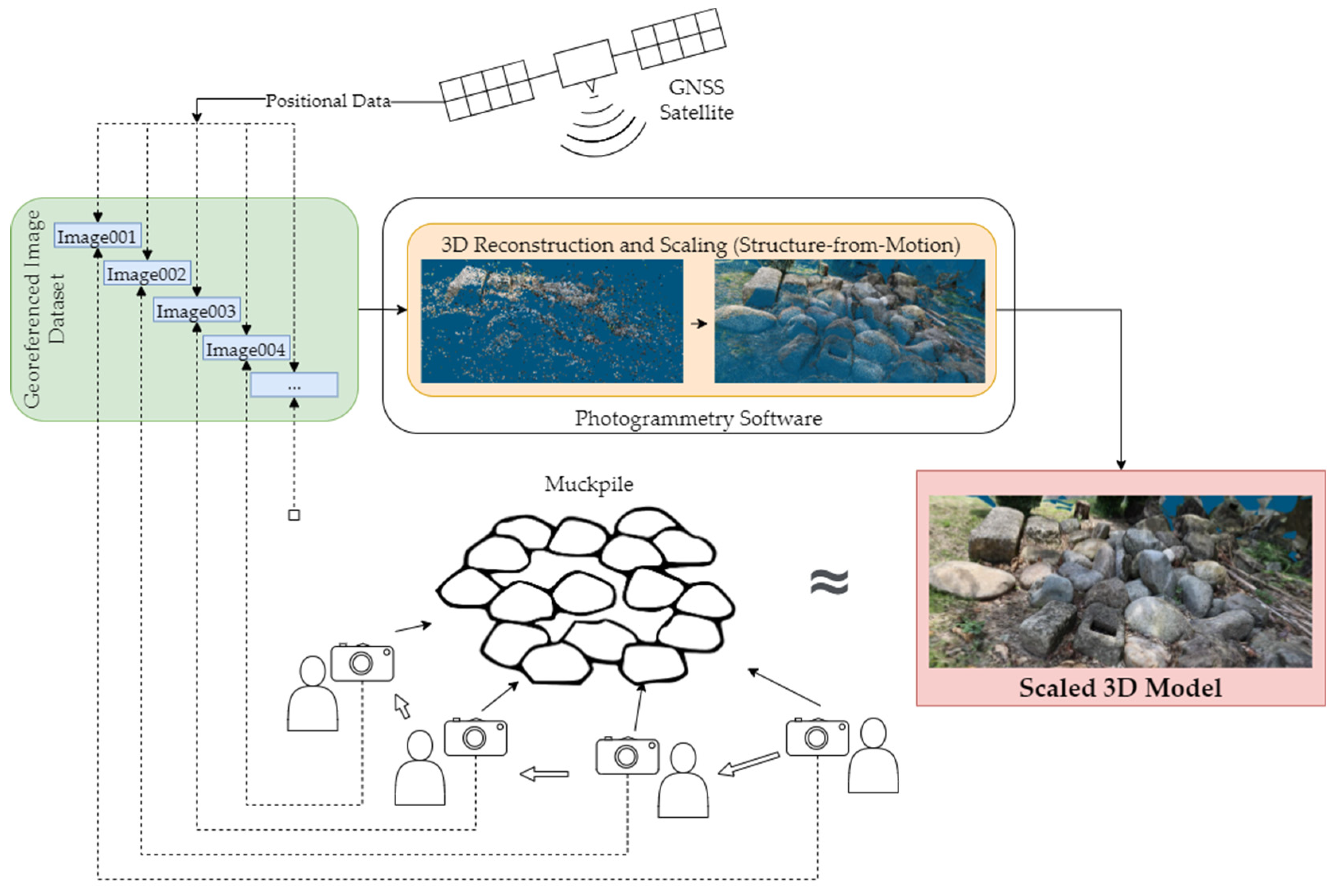
Figure 2 shows a general overview of the proposed system for this study. Utilizing a smartphone’s built-in GNSS receiver, GNSS data can be logged and sent to a camera. At the moment an image is taken, GNSS data can be embedded into the image’s metadata (EXIF).
In a similar study [
11], a Real Time Kinematic (RTK) GNSS receiver was used in conjunction with a camera for a photogrammetric survey of a geological outcrop. The method suggested in this study is a potentially cheaper alternative as it utilizes the built-in GNSS receiver in a smartphone. In a similar fashion, the method used by this study allows for greater flexibility as it is a point-and-shoot method that does not require external preparation. While this can mean that more photos will be needed to generate a 3D model, the cost-efficiency and the practicality of not having to use GCPs or physical scales can be desirable in some applications.
3. GNSS-Constrained SfM on Monuments of Known Dimensions
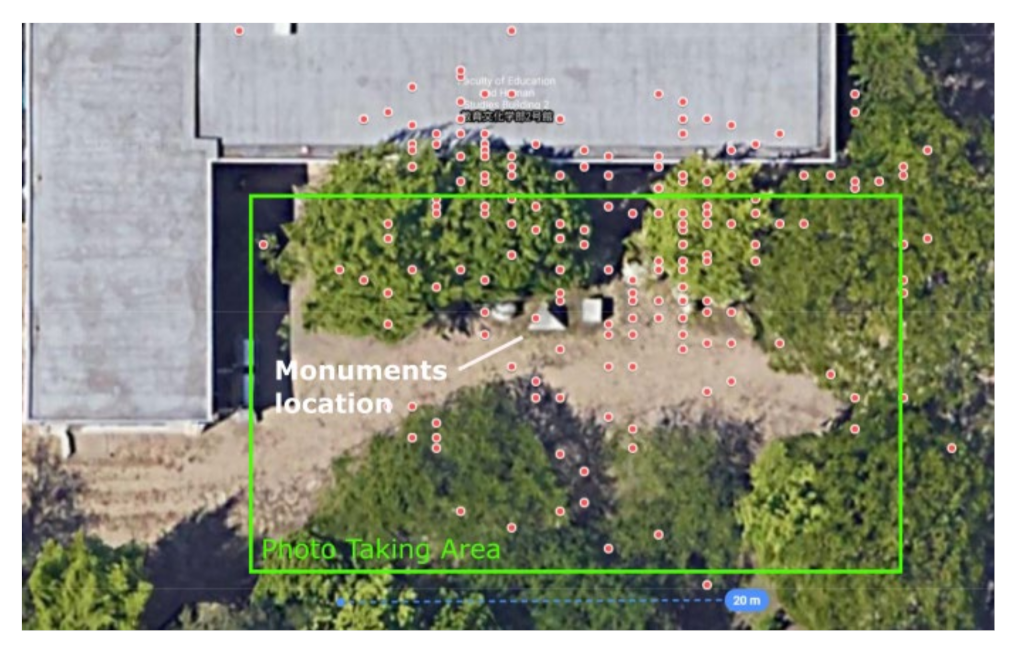
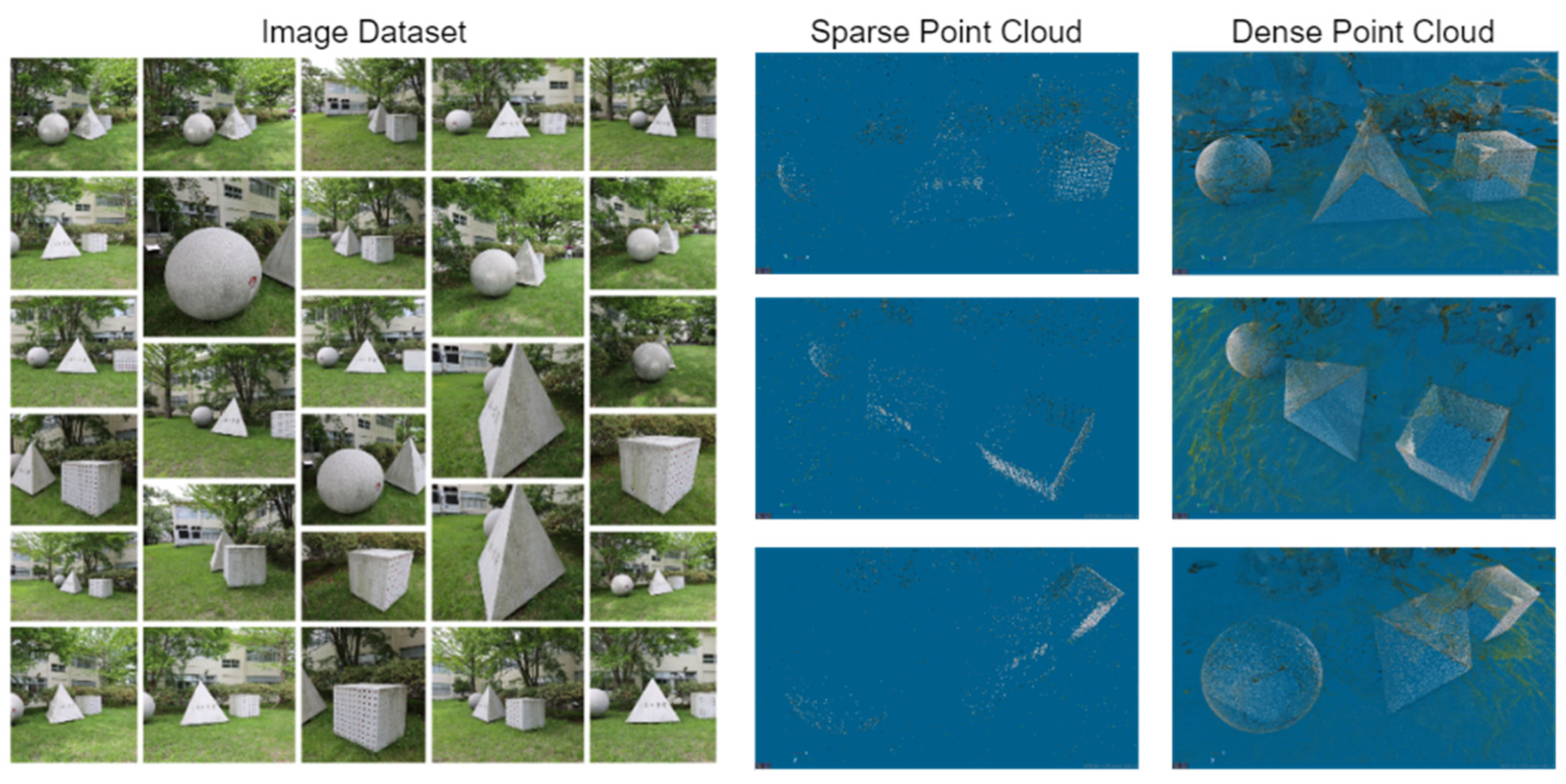
To perform quantitative evaluation of the effects of GNSS constraints on the scaling error of 3D reconstruction using SfM, an analysis using monuments of known dimensions outside Akita University was done. The experiment aims to correlate the scaling error to the number of images used in SfM. The hypothesis of this experiment is that, as more images are used, the scaling error due to GNSS error will decrease. In this scene, the cube-shaped monument has sides measuring approximately 1 m. This dimension is used to compute the scaling error. This particular scene was chosen for this reason, in addition to the monuments being of simple 3D shapes, making analysis of measurements more accurate for the purpose of quantitative evaluation.
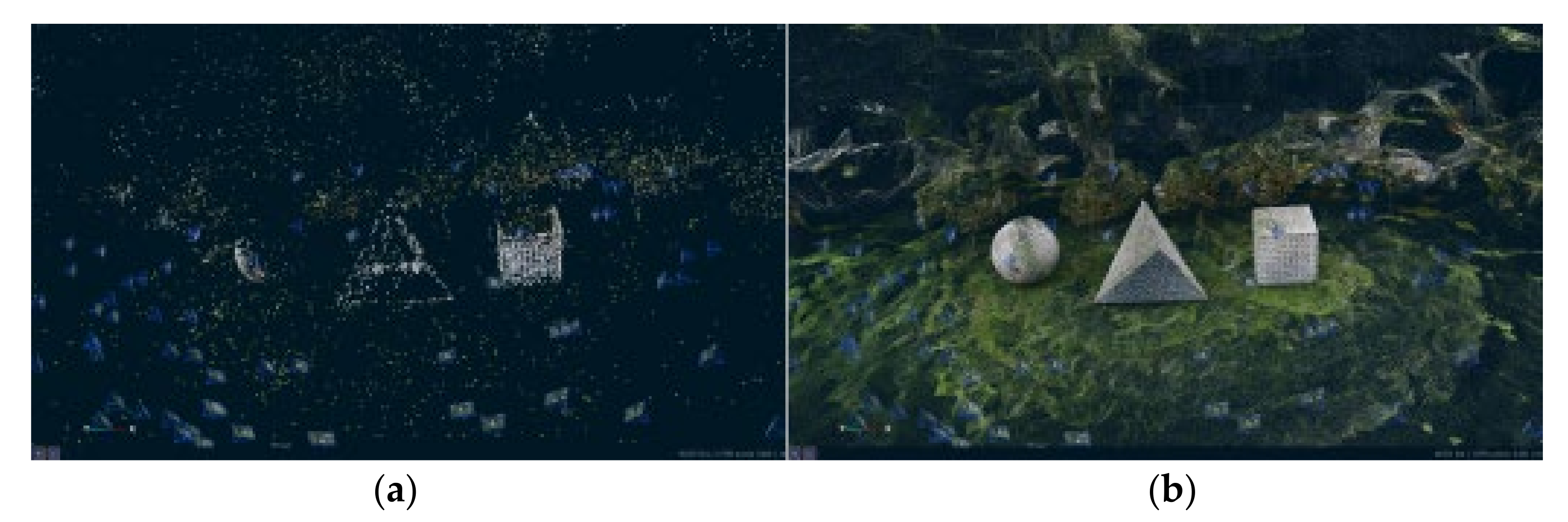
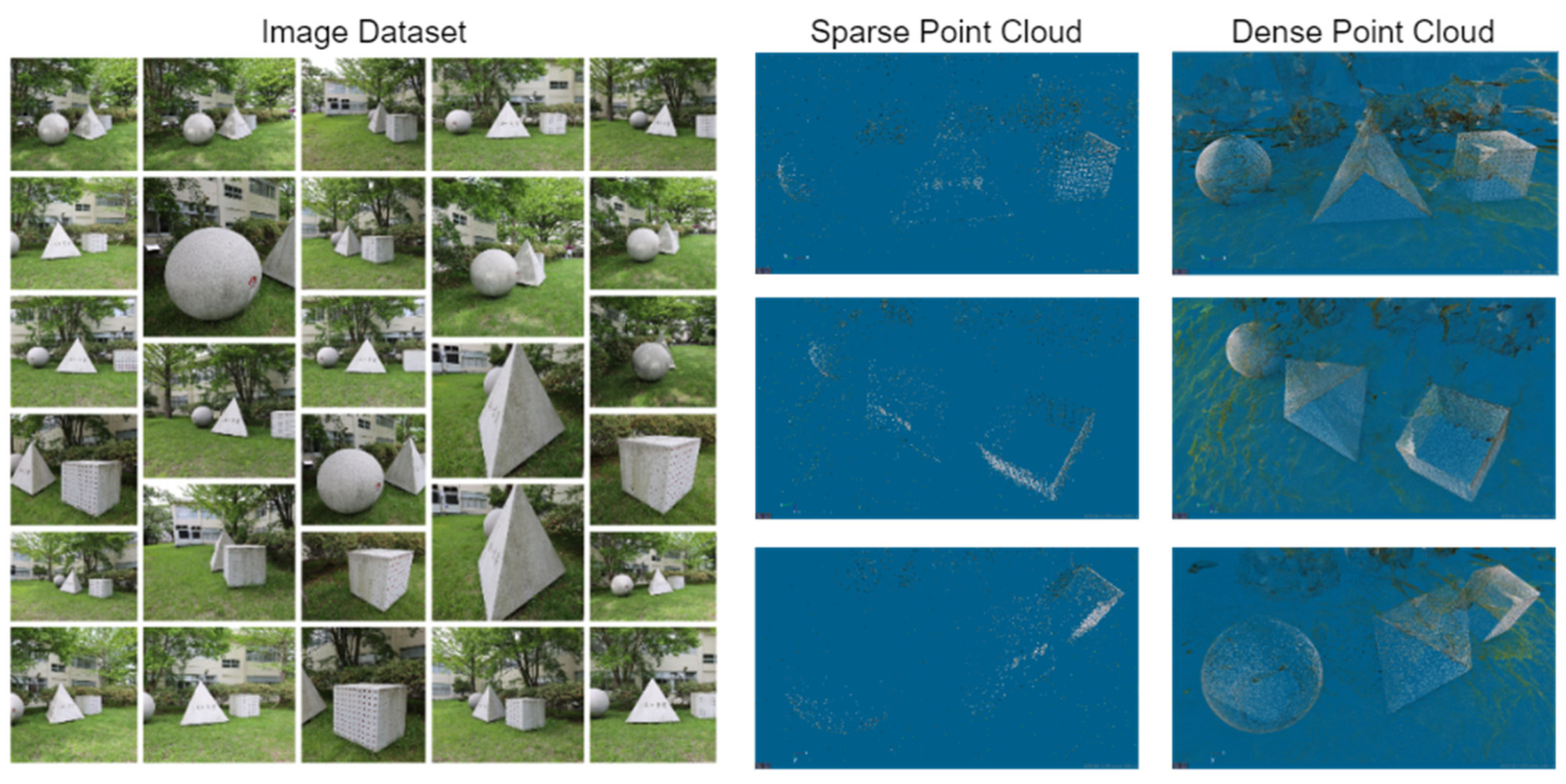
For this experiment, around 200 images of the scene were taken across 2 days at roughly the same time of the day, with sample images shown in
Figure 12 and a map of the depicted photo taking area and the recorded camera positions in
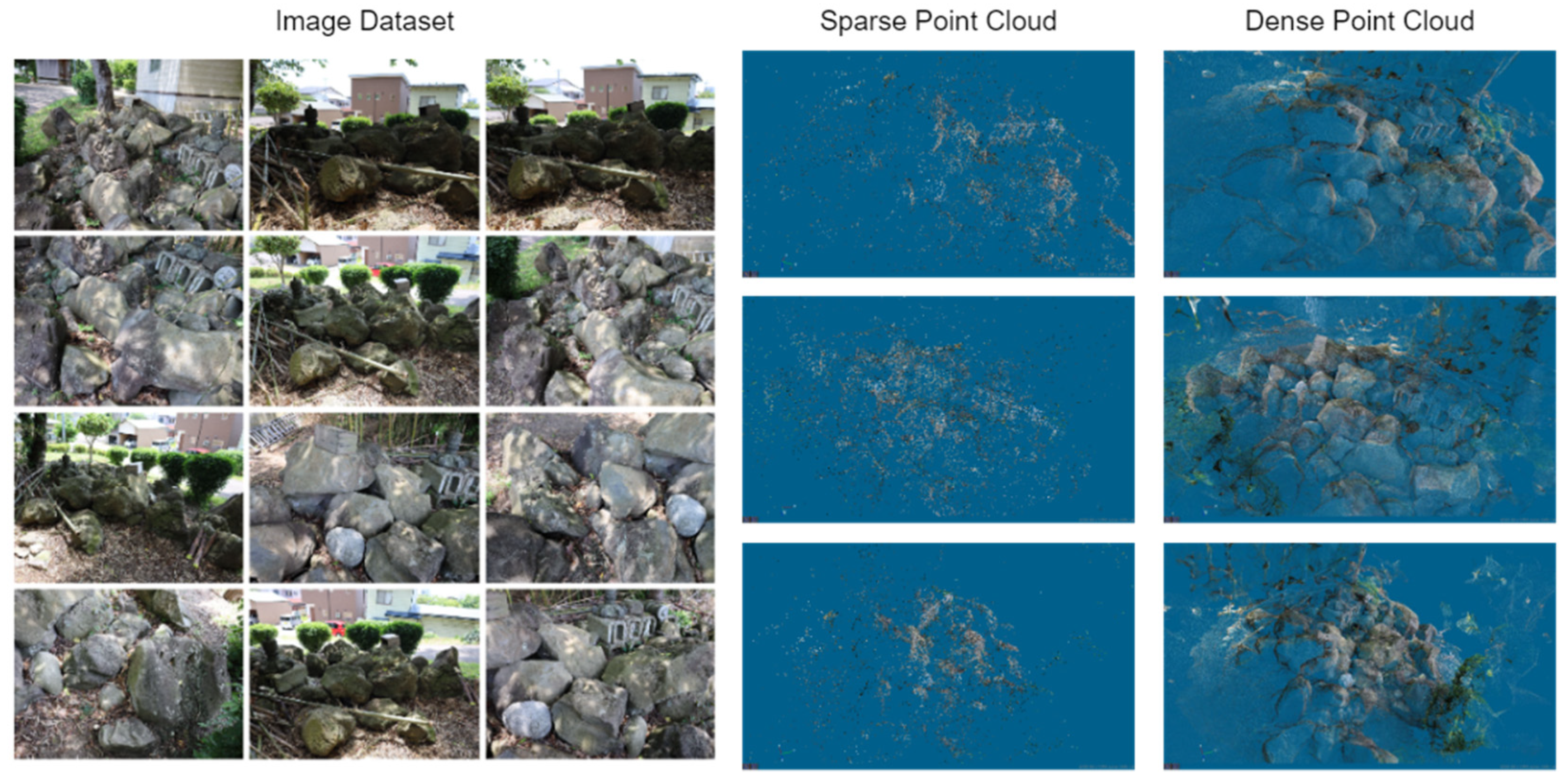
Figure 13. For this and the proceeding experiment, the camera was used freehanded without a tripod, with a Xiaomi Mi 9T Pro smartphone placed close to the camera sending GNSS data to it via Bluetooth. The dataset, as with the previous experiment, was used to create 3D reconstructions at different image numbers, with an example shown in
Figure 14. The scaling error when varying number of images are used was noted and compared. For reconstruction purposes in this and the following experiments, 3DF Zephyr was used, with a setting of 50% GNSS data weight, as specified in the software’s manual [
22].
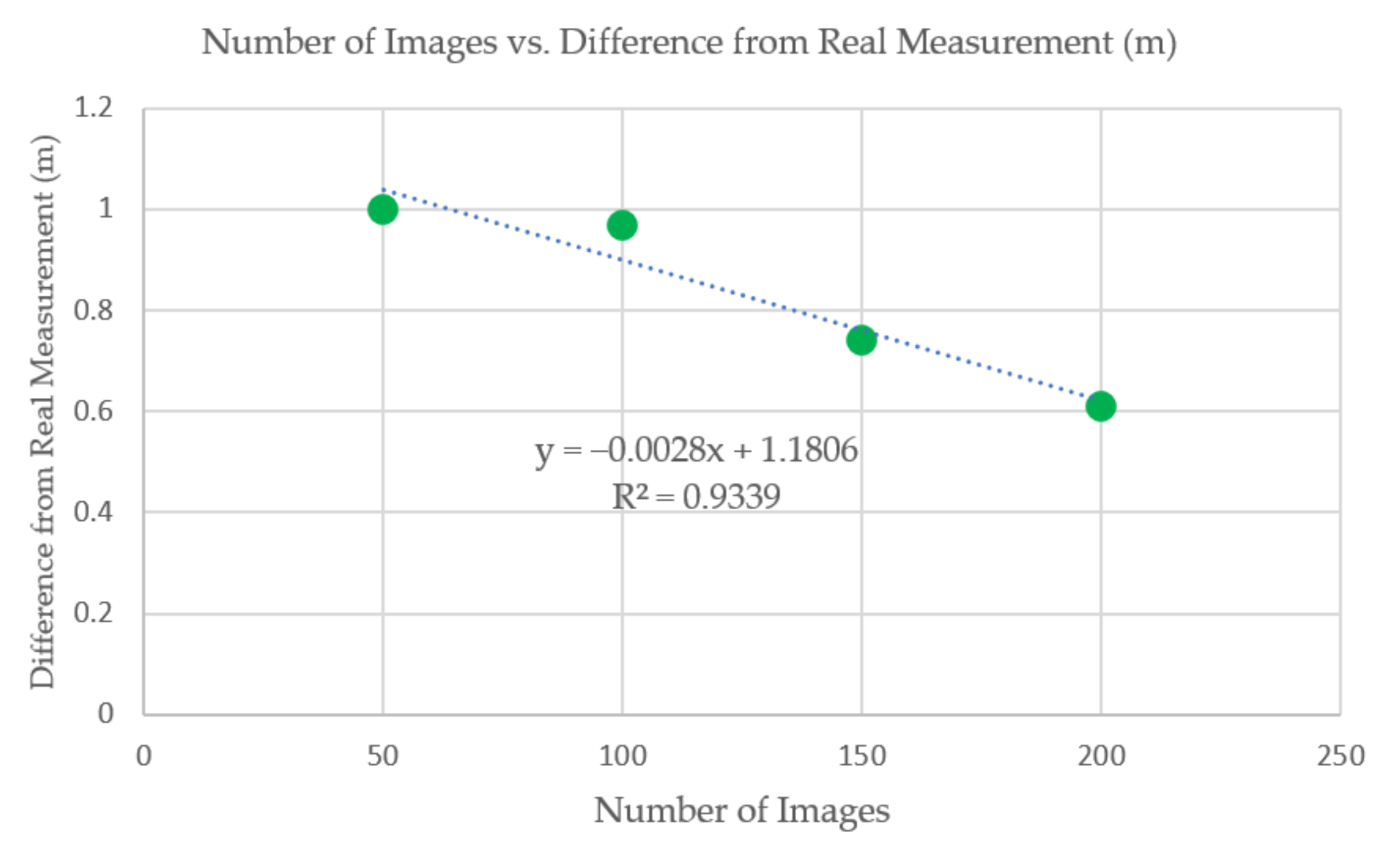
As shown in
Table 1 and
Figure 15, there is a trend that at increasing number of images used in reconstruction, the difference from the real measurement decreases. This increase in accuracy lends credence to the hypothesis that using more images for reconstruction has the tendency to lessen scale error in 3D models. Using the trendline of the data, a model with a difference from real measurement of 0.1 m (10% scaling error) can be hypothetically created if 386 (385.93) images are used.
4. Experiment on a Pseudo-Muckpile
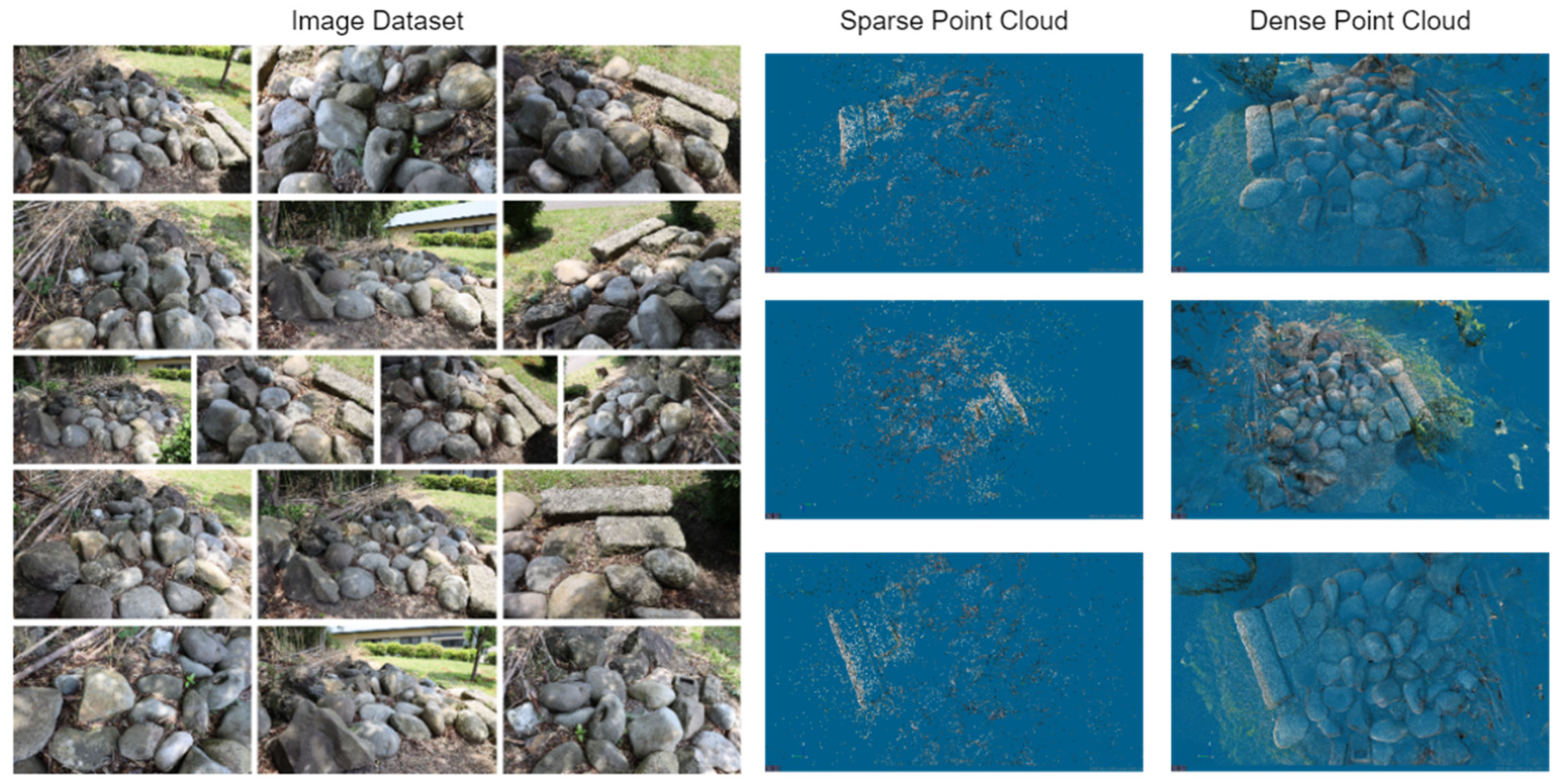
For this test, the goal was to recreate a scene of a collection of boulder-sized rocks found at a temple site near the university, shown in
Figure 16. The aim of this case study is to provide both quantitative and qualitative evaluation of the effects of GNSS constraints on the scaling error of 3D reconstruction with a subject that is a close simulation of an actual muckpile in a mining environment. The study conducted an experiment using a rock pile located near Akita University. These rocks are similar in size and shape to a muckpile, and, if the effectiveness of the method on this dataset can be confirmed, it can be assumed that the method will be equally effective on an actual muckpile in a mine site.
A total of 200 photos were taken and split into two datasets (Set #1 and #2) as shown in
Figure 16 and
Figure 17, with a map depicting the photo taking area and the recorded camera positions found in
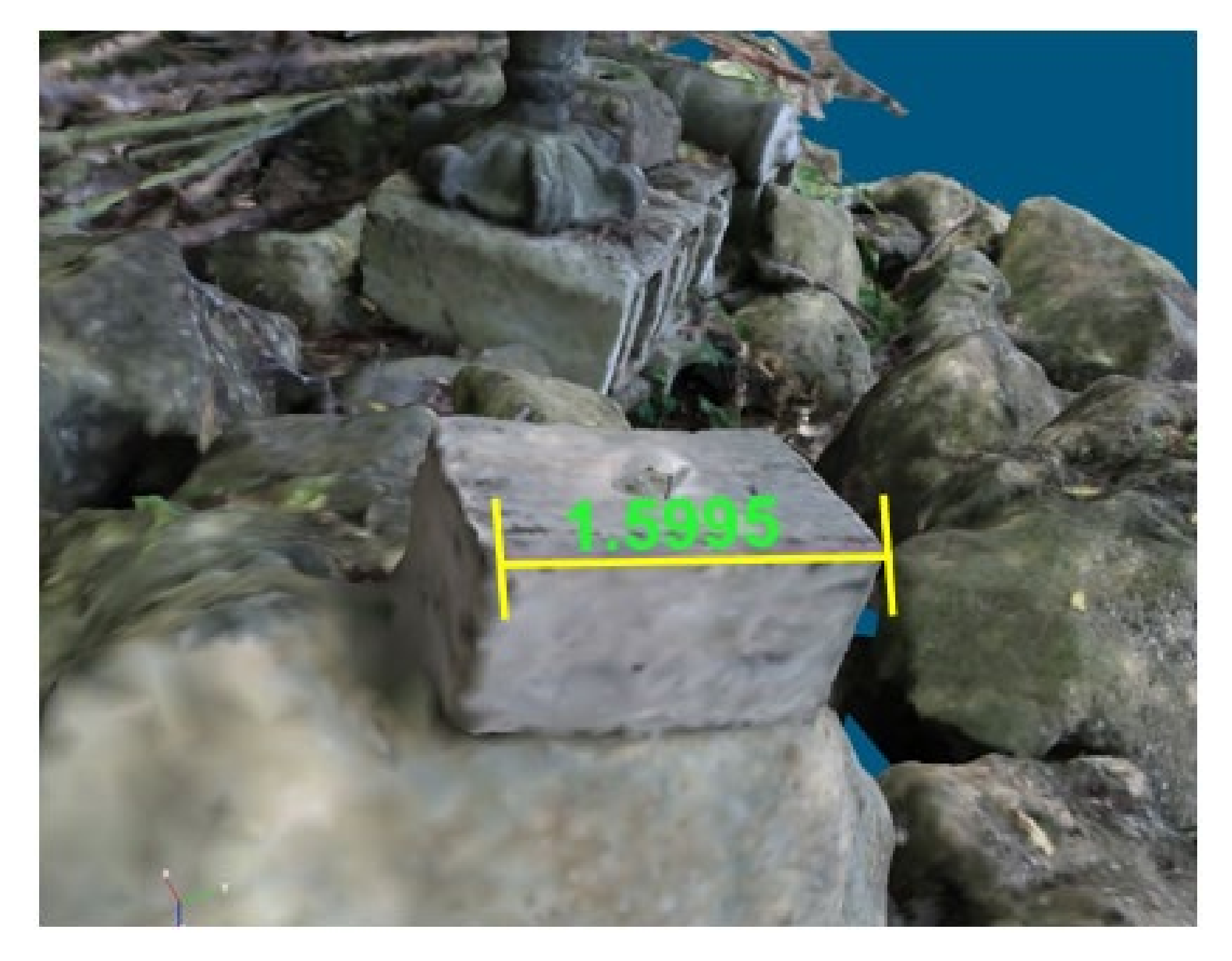
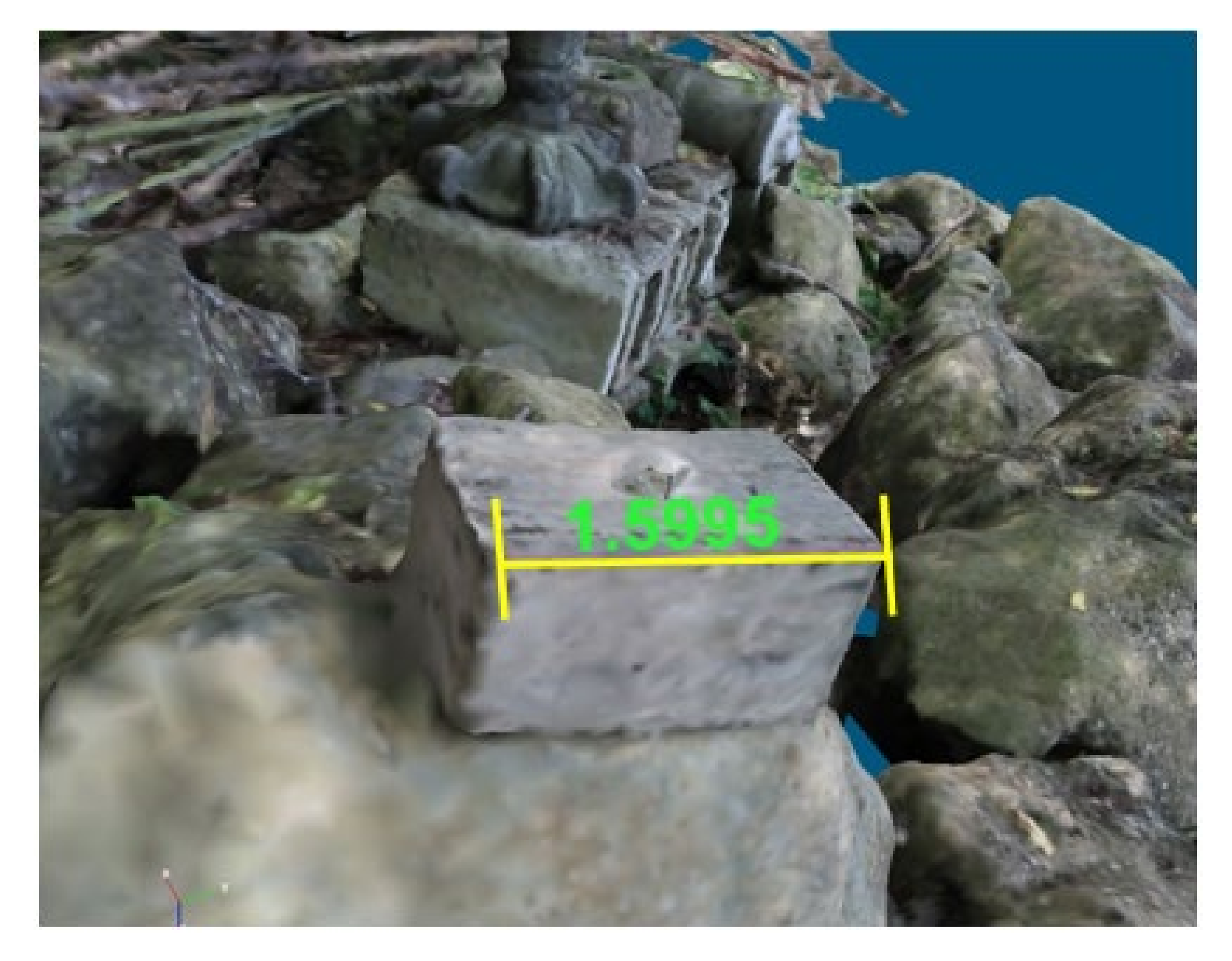
Figure 18 The rockpile was divided into two parts, one with bigger, angular rocks and another with smaller, rounded rocks. Both piles were around 4 m wide on their longest side and are less than a meter long. A wooden box measuring 30 by 30 by 17 cm was placed in the scene for reference, as shown in its reconstructed form in
Figure 19. In addition, measurement of the big, rectangular prism-shaped rock with dimensions of 35 cm × 40 cm × 30 cm were taken for reference as well, which can be seen in its reconstructed form in
Figure 20.
After the photos were taken, they were once more processed to produce several 3D models at different image numbers. The scaling error and the reconstruction quality was then observed in a similar fashion to the previous experiments. Since two sets of data were used for this experiment, scaling errors between using 50 images (chosen at random) and 100 images for each set were used. An additional exploratory test using 200 images using both sets was added for testing. The study’s initial hypothesis, however, was that this will introduce some reconstruction errors as there are not enough images that are similar between these two scenes.
The measurement comparison is shown in
Table 2. For Set #1, at 50 images used, the difference from the real measurement of the width of the box (0.3 m) was 2.6 m. At 100 images used, the difference was 1.3 m. This led to a decrease of 1.3 m in the scaling error when using 50 more images. For Set #2, at 50 images used, the difference from the real measurement of the width of the rectangular rock (1.4) was 4.8 m. At 100 images used, the difference was 4.6 m. This led to a decrease of 0.2 m in the scaling error when using 50 more images.
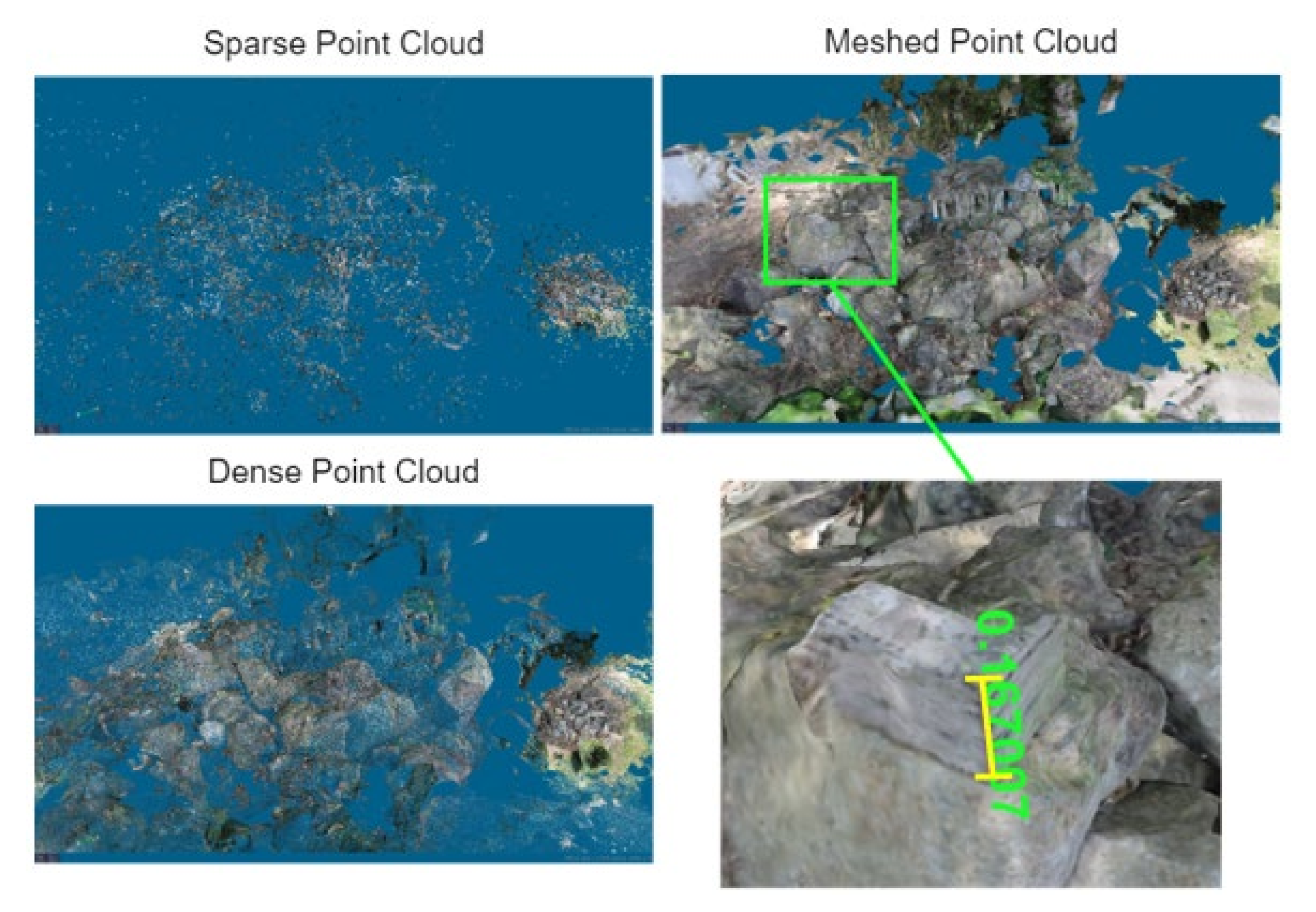
For a final, investigational set using 200 images combining both previous sets, a surprising result was observed—even though there were significantly more reconstruction errors (missing parts, duplicating parts, etc.) in this particular reconstruction, the wooden box width in this reconstruction was measured at 0.167 m with a difference of 0.01 m from the real measurement. A reconstruction is shown below in
Figure 21. We considered that this increase in accuracy can be attributed to not only the number of images increasing but also the general area of the scene becoming larger as it includes both pseudo-muckpiles (the effect of model size on GNSS error is discussed in a latter part of this section). However, combining the datasets also means that the scene being reconstructed is contextually different as it now includes both parts of the pseudo-muckpile.
From both experiments, we can see through the maps in
Figure 14 and
Figure 17 the apparent GNSS drift that occurs during the photo taking. Some of the recorded camera positions are either outside the photo taking area or are in spots that are obstructed. The study recognizes that these changing boundary conditions have an effect on the results, and a separate investigation on this could provide insight for GNSS-aided photogrammetry. Aside from the inaccuracies found in GNSS, several additional factors have been considered to contribute to the drift. One of these is the effect of the partial tree cover in some of the camera positions.
A previous study [
23] in a similar setting (university campus) analyzed the effect of not only partial tree cover but also nearby infrastructure on GNSS accuracy by comparing GNSS data to total station survey data. The results showed that some points were no longer suitable for GNSS positioning due to high GDOP (geometric dilution of precision), and, where it was suitable, the GNSS recorded position differed by as much as 5.7 m from the total station data. This difference is consistent with what transpired in this study’s experiments, as can be seen from the maps. In a mining site, where there is usually less vegetation and obstruction, this effect should be diminished, except in situations such as benches shadowing satellites.
Another factor that can be considered is the overall scale of the pseudo-muckpile. A large majority of GNSS-aided photogrammetry applications are typically in the form of aerial imagery and mapping with a scope and scale larger than both of the terrestrial photogrammetry experiments performed in this study. A study [
24] investigating the application of terrestrial photogrammetry in field geology by using SfM-MVS aided by GPS to model an outcrop that long observed scaling and rotational errors in their reconstruction. Aside from concluding that GNSS contributed highly to these model errors, they suggested that, at a larger scale, the error would be less of an issue.
In parallel to this, the study observed that the relatively small scale of the experiment area affected the data; particularly the pseudo-muckpile whose size was smaller than a muckpile that one would normally find in a mining operation. Ultimately however, the results showed that, even at this scale, incremental improvements to 3D model scaling have been made as shown in the data.
5. Conclusions
In this paper, we proposed a low-cost method of creating an accurately scaled 3D model without the use of GCPs by constraining camera positions through the use of georeferenced images as input for SfM. Monitoring fragmentation size is an important procedure in optimizing mining operations that perform blasting. In recent years, a new method that involves using 3D photogrammetry to measure fragment sizes has been developed and has the potential to surpass traditional techniques. For this particular process to be accurate, a method for properly scaling 3D model with georeferenced images using GNSS was investigated.
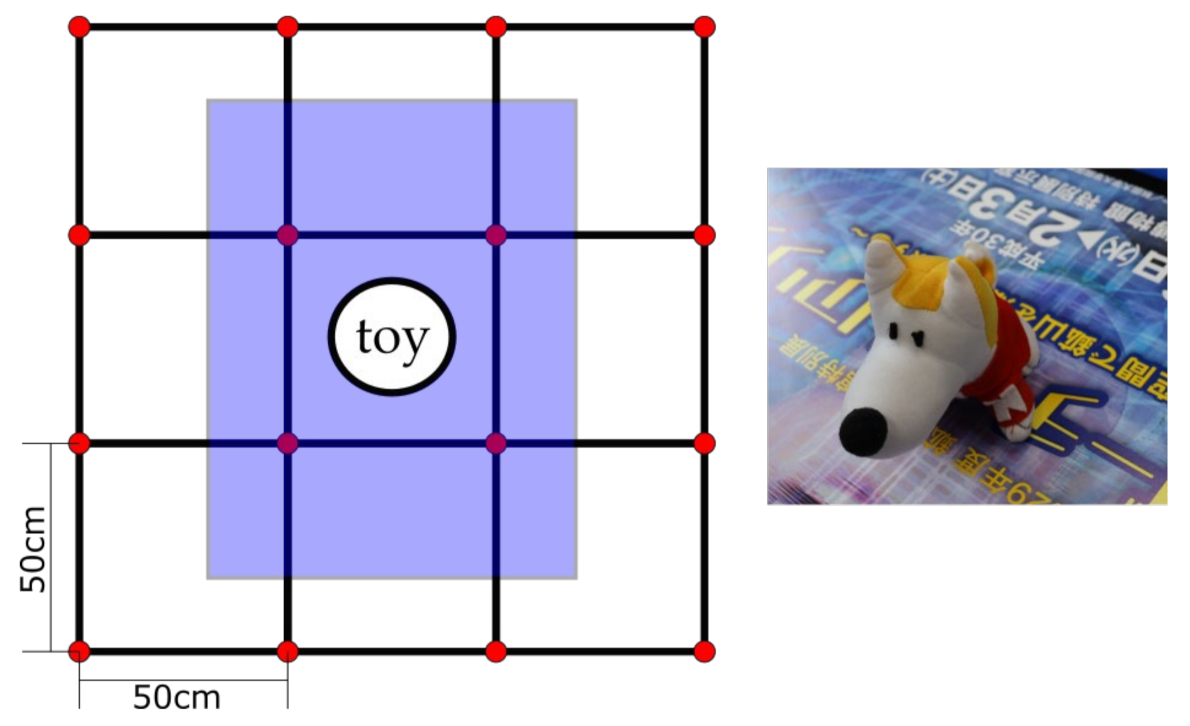
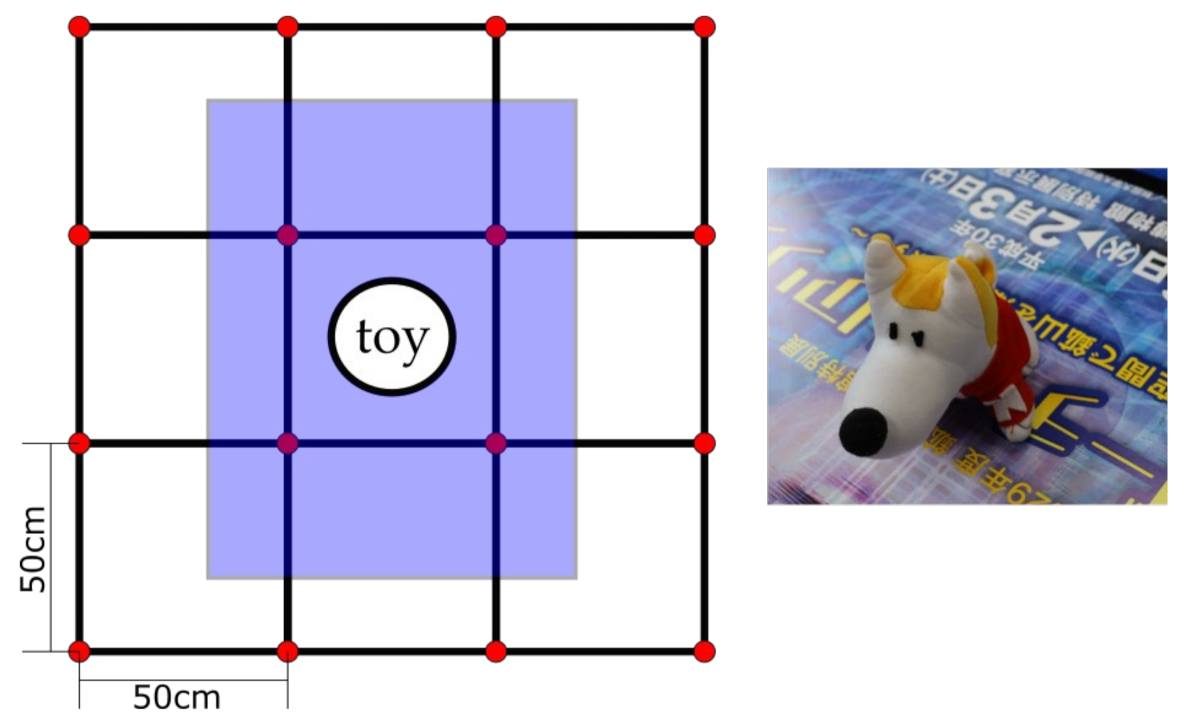
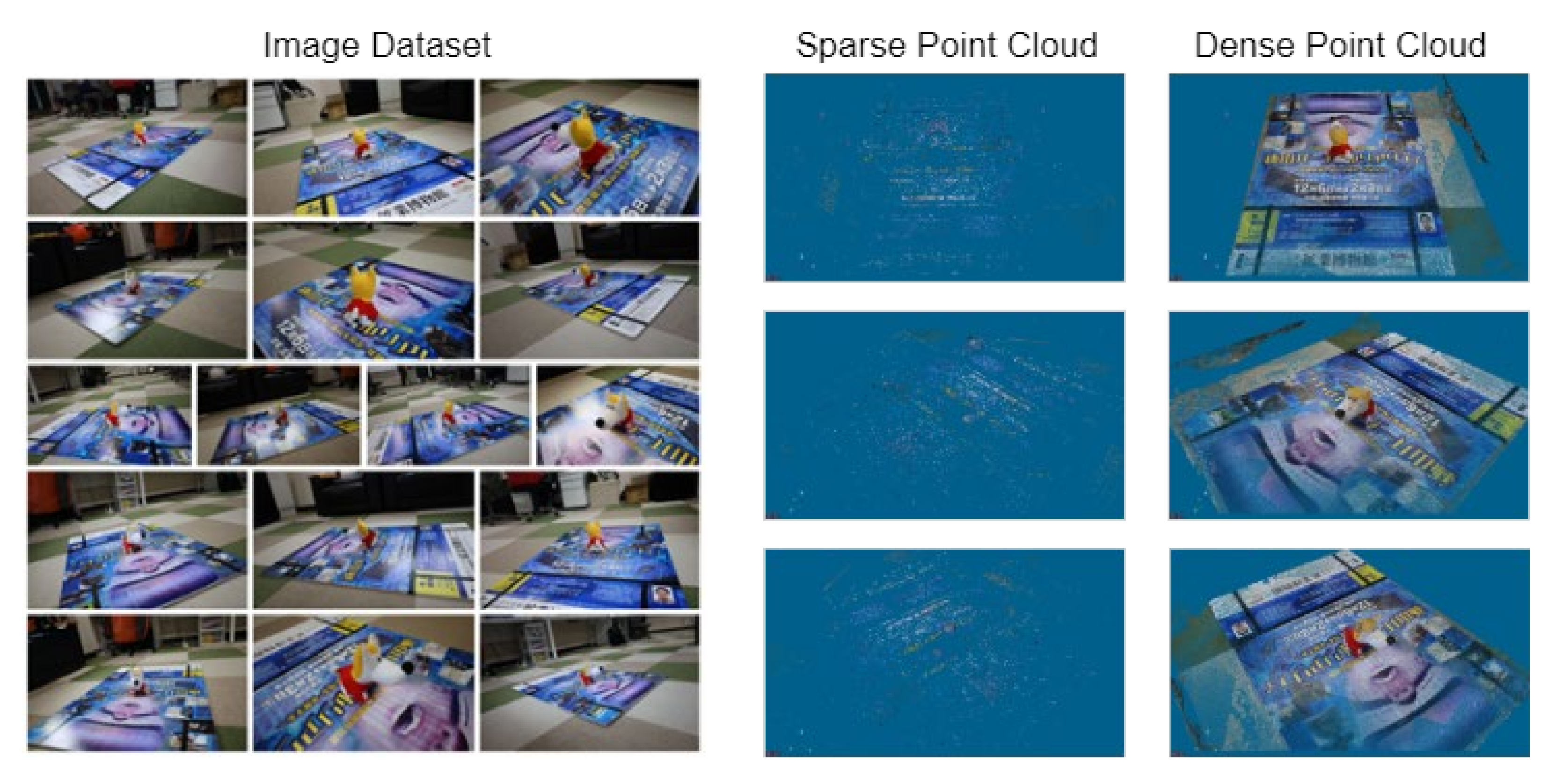
To validate the method, several experiments were performed. As an initial test to prove the fundamentals, an indoor scene involving a small object was recreated in 3D space using SfM with photos of the known relative positions for constraining the camera location, and good results that showed that the created 3D model had a scaling error of 1.27 cm were achieved. For the main experiment, the study took georeferenced photos of an outdoor scene with a monument of known dimensions and made several reconstructions at increasing number of images used (50, 100, 150, and 200 images, respectively). The results showed a linear pattern with an R-squared value of 0.93 in which the scaling error decreases as the number of images used increased.
Finally, an experiment was performed to verify the study’s hypothesis further using a scene that included a pseudo-muckpile to simulate the usage of the proposed system for a mining operation. In a similar fashion, the results showed increasing scale accuracy with an increasing number of images used in reconstructions. Two observations can be drawn from the experimental results: (1) constraining cameras to accurate positions in SfM resulted in a properly scaled 3D model and (2) increasing the number of georeferenced images in SfM incrementally improved the scaling error of the reconstruction. These observations can help improve scale accuracy in GNSS-aided 3D fragmentation measurements. The method described in this study will be of interest when cost-efficiency and practicality are desired in a 3D fragmentation measurement system.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}