1. Introduction
Global Positioning System (GPS) is a widely used positioning system which can provide highly accurate outdoor position information in real-time and in all weather conditions. Due to signal attenuation, multipath interference and other factors in the indoor environment, the accuracy of GPS cannot meet the requirements of indoor positioning accuracy [
1].
With the development of society, the demand for indoor positioning is growing, for example, in route planning for public places such as smart homes, airports and shopping malls, as well as positioning for emergency situations, such as fire and earthquakes. Many different indoor positioning technologies have been developed to obtain position information in different indoor environments. According to the information sources, the common technologies for indoor positioning can be divided into Wi-Fi [
2,
3,
4], Ultra Wide Band (UWB) [
5,
6], Ultrasound [
7], and Micro-Electro-Mechanical Systems (MEMS) [
8] etc.
Indoor pedestrian positioning based on MEMS is an autonomous positioning system; it can provide position information without additional infrastructures thanks to the development of the manufacture process—the integration of MEMS devices has been improved and the volume has been greatly reduced, which make MEMS more suitable in indoor positioning applications.
There are two kinds of inertial positioning methods based on MEMS, the first one is the inertial navigation system (INS), which can provide the 3-axis position information, 3-axis velocity information and 3-axis attitude information by integrating accelerations and turn rates obtained from inertial sensors with time; the other one is Pedestrian Dead Reckoning (PDR), which can provide 2-axis horizontal position information and heading information by detecting the statement of the pedestrian and calculating the step length from step to step. The pedestrian positioning based on MEMS can work without external information; however, there are accumulative errors caused by inertial sensors and algorithms, which can greatly reduce the positioning accuracy. Hence, Zero-velocity update (ZUPT) is adopted to limit the accumulative errors of indoor positioning based on MEMS.
There are two kinds of indoor positioning methods based on a Wi-Fi signal: the first one is Wi-Fi fingerprinting positioning, and the other is Wi-Fi propagation model positioning. Normally, the average accuracy Wi-Fi propagation model is lower than the accuracy of Wi-Fi fingerprinting. In this paper, the Wi-Fi positioning is used intermittently when the pedestrian is closed to Access Points (APs) by detecting the Received Signal Strength (RSS) of Wi-Fi. The accuracy of the Wi-Fi propagation model closed to APs is higher than the average accuracy of the Wi-Fi propagation model. Compared with Wi-Fi fingerprinting positioning, the Wi-Fi propagation model positioning requires less pre-preparation. In this paper, Wi-Fi propagation model positioning is adopted to obtain position information intermittently.
The research work in [
9] adopts ZUPT to limit the accumulative errors of inertial sensors based on Extended Kalman Filter (EKF); the velocity error can be effectively compensated. However, the positioning error quickly increases as the distance increases. Hence, more information sources are needed for data fusion to improve the accuracy of indoor pedestrian positioning by providing redundant data. With the development of smart device sensor integration, the wireless network covers many indoor scenes; it can be considered as an information source to provide auxiliary information. Single positioning technology cannot meet the indoor positioning accuracy; the key to improving the accuracy of indoor pedestrian positioning is the data fusion algorithm.
At present, the Bayesian estimation algorithm is widely used in indoor pedestrian positioning and EKF and Particle Filter (PF) are commonly used algorithms in the nonlinear model; EKF is used in indoor pedestrian positioning because the pedestrian movement model is weakly nonlinear; PF is applied to the nonlinear system state and measurement model and the noise can be non-Gaussian noise.
The work in [
10] fuses the building structure information and Pedestrian Dead Reckoning information by backtracking the particle filter. However, this technique still lacks the compensation for inertial navigation accumulative errors. Meanwhile, the particle filter is implanted in each step of the pedestrian, which leads to heavy computation.
INS assisted by ZUPT is commonly used in the indoor pedestrian positioning system based on MEMS. The frame combines INS with ZUPT based on EKF to limit accumulative errors, and a single foot-mounted inertial sensor is used to collect pedestrian state information. Research work in [
11,
12] adopts the above-mentioned positioning frame; additional infrastructure is not required in this frame. In research work in [
13], a positioning system adopt INS and PDR to combine the advantages of both mechanizations for micro-electro-mechanical systems (MEMS) sensors in pedestrian navigation. However, the heading error cannot be compensated for when the velocity error is introduced as an observation based on EKF.
Research work in [
14] employs a cascaded extended Kalman filter to fuse the data of Wi-Fi fingerprinting, foot mounted inertial and magnetometer sensors. The research work in [
15] combines the fingerprinting-based WLAN system with the INS system, and INS navigation data can speed up the construction process of the fingerprint database. The work in [
16] obtains the position information of the pedestrian by combining Wi-Fi fingerprinting and inertial sensors based on PF; the three methods introduce Wi-Fi fingerprinting as additional information, which requires a pre-survey for the offline fingerprinting map.
In this paper, indoor pedestrian positioning with two-order Bayesian estimation based on EKF and PF is proposed to improve the accuracy of indoor pedestrian positioning. In the first update, INS plays a major role in the calculation of pedestrian positioning, and ZUPT is introduced as the reference to correct the accumulative errors of INS based on EKF; in the second update, the estimated results obtained from the first update, which are horizontal position information, are introduced as the observations in the second update. PDR plays a major role in the calculation of pedestrian positioning; the method of data fusion is PF, the particle weight is determined by the Wi-Fi propagation model, building structure information and output of first-order data fusion.
The paper is organized as follows. In
Section 2, the principles of INS, ZUPT, PF and the Wi-Fi propagation model are investigated. Then, in
Section 3, an integration approach and details of filter design are proposed.
Section 4 presents experiment and error analysis.
Section 5 summarizes the whole paper.
3. Fusion Algorithm
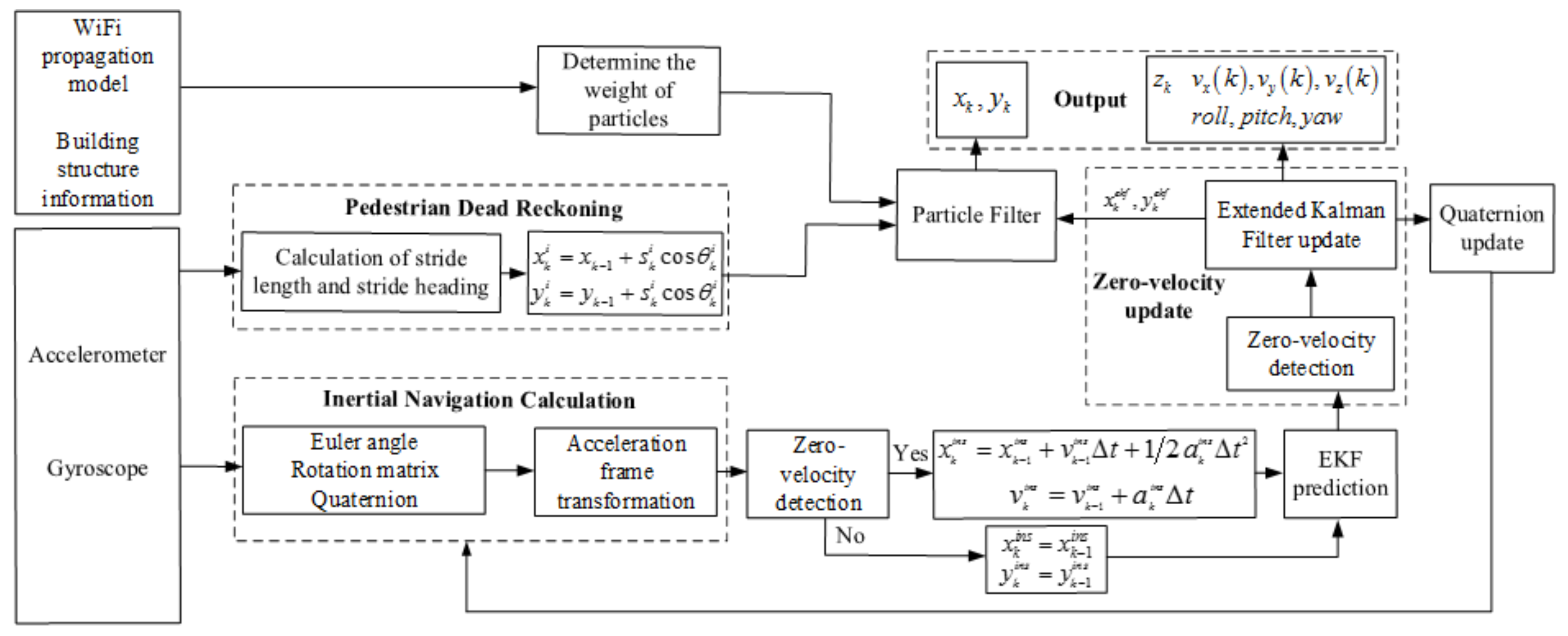
An overview of the proposed indoor pedestrian positioning with two-order Bayesian estimation based on EKF and PF is illustrated in
Figure 1. In the proposed method, there are four information sources in the far left of the frame diagram, including an accelerometer, a gyroscope, the Wi-Fi propagation model and building structure information. Data collected from the accelerometer and gyroscope are used to make an INS calculation and PDR calculation. In the INS calculation, the 3-axis accelerations and 3-axis turn rates are used to calculate the Euler angle, rotation matrix and quaternion, and then achieve the conversion of accelerations from the body frame to the navigation frame. The acceleration integrates once and twice over time to obtain the velocity and position of the pedestrian in the navigation frame. The ZV update based on EKF will be used to compensate for accumulated errors. The first-order data fusion output includes
,
,
and
. The 3-axis accelerations and 3-axis turn rates are also used to calculate the stride length. The second-order data fusion method is PDR based on the particle filter; the Wi-Fi propagation model, building structure information and the position output of first-order data fusion determine the weight of particles together. Finally, a horizontal position
can be obtained.
3.1. First-Order Data Fusion
3.1.1. Quaternion Update
The 3-axis accelerations and 3-axis turn rates in the sensor frame can be obtained from foot-mounted inertial sensors, and an orientation is needed to obtain the 3-axis acceleration in the navigation frame. There are three equivalent ways to represent an orientation: Euler angles, rotation matrix and quaternion. In this paper, rotation matrix is used to achieve the frame conversion. Because the calculation of the rotation matrix is complex, quaternions are adopted in the iteration process; the update of the quaternion is shown in the following equation:
where
is the skew-symmetric cross-product operator matrix,
,
and
are the turn rates of the X-axis, Y-axis and Z-axis, respectively.
Then, the new rotation matrix is updated with new quaternions:
3.1.2. Pedestrian Inertial Navigation Solution
The velocity of the pedestrian can be obtained by initial velocity and integration of the acceleration in time.
where
is the Z-axis acceleration that subtracts the acceleration of gravity,
,
and
are the 3-axis velocities of the pedestrian at time
k, respectively.
,
and
are the 3-axis locations of the pedestrian in time
k. Through the above equations, the velocity and position of the pedestrian at time
k can be obtained.
3.1.3. EKF Implantation
In the proposed system, a 9-dimension state vector is expressed as:
where
,
and
are velocity errors, position errors and attitude errors in the navigation frame, respectively.
By the discretization of the state transition equation and measurement Formulas (2) and (3), the discrete-time state transition equation and measurement equation can be obtained.
(1) The state transition equation:
In order to obtain the state transition matrix
, the skew-symmetric matrix
can be expressed as:
where
,
and
are accelerations in the navigation frame at the X-axis, Y-axis and Z-axis, respectively. Hence, the state transition matrix
can be expressed as:
(2) The measurement equation:
After a linearization in measurement Equation (3), the above equation can be obtained, where and are measurement matrix and measurement noise, respectively.
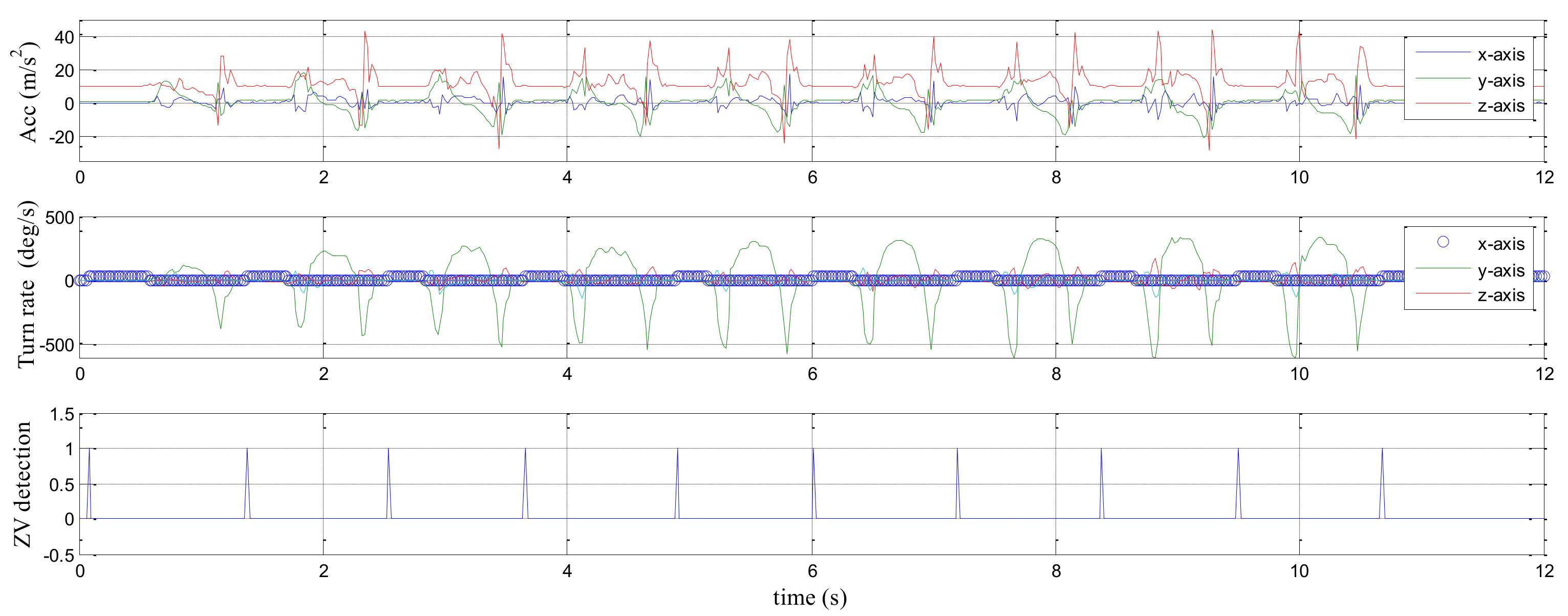
When the Zero-velocity detection is triggered, the velocity of the pedestrian is zero in theory. Actually, due to the drift and accumulative errors of the inertial sensor, the velocity is usually not zero. Therefore, during each Zero-velocity update, the velocity error obtained from inertial sensors is considered as a measurement; the measurement matrix
is designed as follows:
The priori estimate of the error covariance
at time
k is calculated by posteriori estimation of the error covariance
at time
k − 1:
In the subsequent update phase, the parameters of the Gaussian posterior PDF are computed recursively at each iteration.
The Kalman gain factor is calculated by the following equation:
The Posterior covariance is calculated by:
where
is an error compensation term, which can be used in the following update phase.
(3) The update phase:
where
,
and
are velocity, position and attitudes in the navigation frame, respectively. All three components include three elements at the X-axis, Y-axis and Z-axis respectively, and the final 9-state of the pedestrian
compensated for by EKF can be obtained, which consists of two parts—
and
—that are used for second-order data fusion.
Through the estimated pedestrian state, the rotation matrix
and quaternion can be updated by:
where
and
are the rotation matrix in time
k and
k − 1, respectively.
is the skew-symmetric cross-product operator matrix. With the movement of the pedestrian, the attitude of the pedestrian will also change; the updating of the rotation matrix from time
k to
k + 1 is realized by the matrix
, and the new quaternion can be calculated by Equation (15).
3.2. Second-Order Data Fusion
From the system block diagram, PF is used to fuse information; the specific implementation of the method is shown in the following.
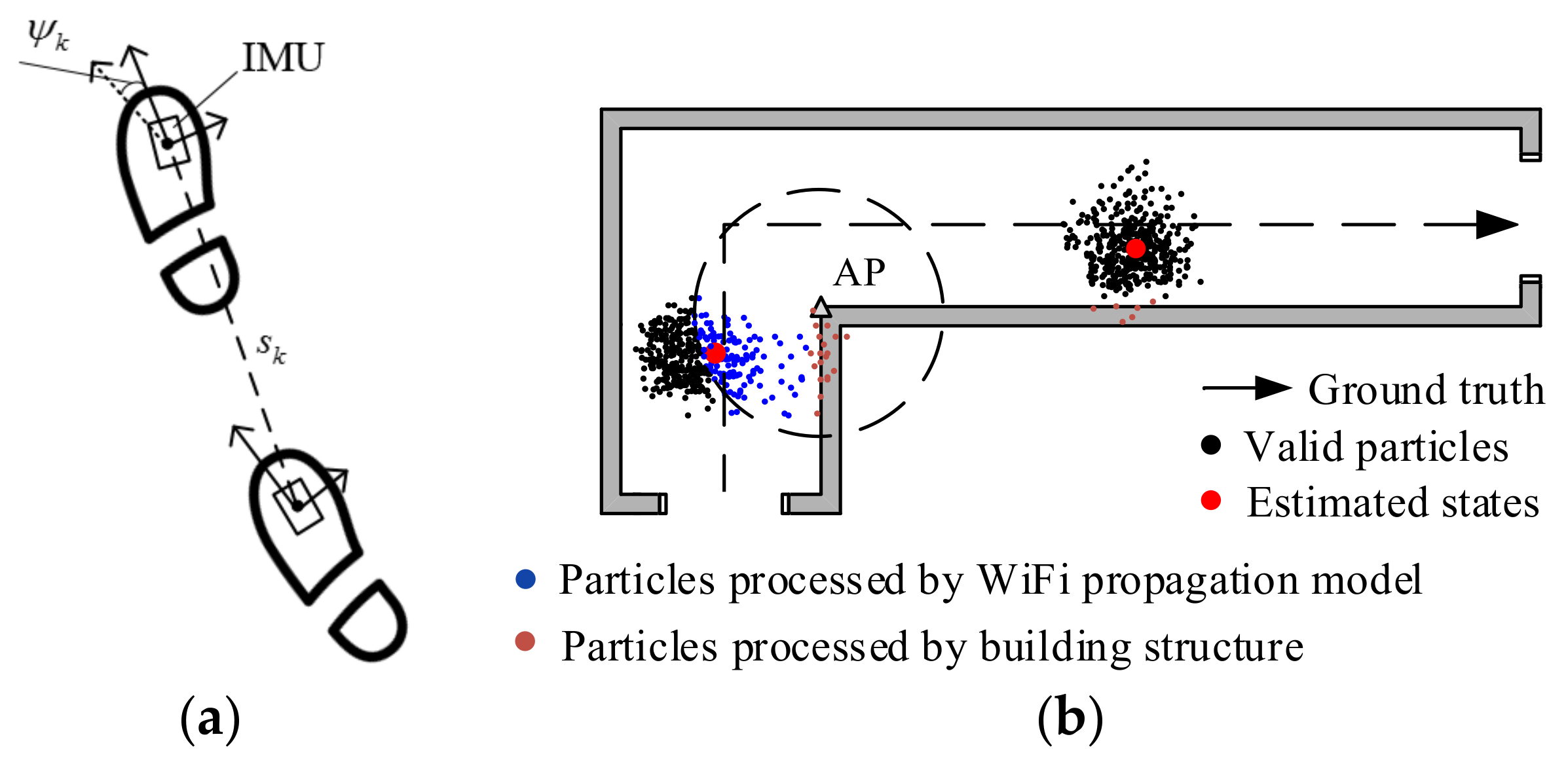
As shown in
Figure 2a, the relationship of the pedestrian’s position information between two different times, and the position of the pedestrian at time
k can be calculated by the step length and the heading of the pedestrian. As shown in
Figure 2b, the colors of the particle represent its weight, which is determined by the Wi-Fi propagation model, building structure information and the output of first-order data fusion.
The following transition function is implemented by the Particle filter for PDR:
where
is the
i-th particle stride length at time
k, sampled from normal Gauss distribution
.
and
are the mean stride length and standard deviation, respectively.
is obtained from numerous experiments.
is the
i-th particle heading, sampled from a normal distribution
,
and
are heading and its standard deviation, respectively.
is provided by the first-filter EKF.
is set to a fixed percentage of the stride-to-stride heading change [
21].
The stride length
varies for different people. There are too many models to calculate the stride length, and the research work in [
22] has proposed an empirical model, which assumes that the stride length is proportional to the vertical movement of the pedestrian hip. In this paper, the stride length is calculated by an empirical model:
where
and
are the maximum and minimum accelerations at the Z-axis, respectively.
is a constant for unit conversion. In this paper,
and
are collected from a period between two ZUPT triggers.
From the transition function,
particles can be obtained in time
k. The weight of particles
can be calculated by:
where
is the location output of EKF,
is the location of the
i-th particle at time
k.
is the standard deviation. The preliminary weight of each particle
and
can be obtained by the Equation (36) [
22].
Before the integration of Wi-Fi information, an offline map of APs’ location information needs to be constructed. The offline map can be expressed as:
where
represents the
i-th AP, it consists of three parts:
is the ID of AP;
is the mean received signal intensity where distance
from the
;
is the horizontal location of
in a building, and the offline map
can be expressed by:
In the online positioning phase, a sequence
includes all APs and corresponding received signal intensity at a location point:
When , it means that the distance between the location point and the AP is less than ; the Wi-Fi propagation model can be introduced in data fusion.
From Formula (11), according to the power of the transmitting antenna, the gain of the transmitting antenna and receiving antenna, and the received Wi-Fi signal strength at the location point, the distance between the AP and location point can be obtained.
In the online positioning phase, the max received intensity value of all
is used to match with the offline map
:
The weight of the particle
will be given by the following expression:
In order to make good use of Wi-Fi and building structure information, an off-phase map is constructed, which includes the positioning distributions of APs, and the geometric profiles of the indoor environment, which can affect the particle weights.
The building structure has a decisive influence on the particle weight, which can be expressed as
, as shown in the following equations:
The final particle’s weight will be expressed by:
Normalized particle weights by following Equation (9), and the final horizontal position can be obtained by the following equations:
5. Conclusions
In this paper, a new indoor pedestrian positioning algorithm with two-order Bayesian estimation based on EKF and PF is proposed to improve the accuracy of indoor pedestrian positioning. In the first update, INS plays a major role in the calculation of pedestrian positioning, and ZUPT is introduced as the reference to correct the cumulative errors of INS based on EKF; in the second update, the estimated results obtained from the first update, which are horizontal position information, are introduced as the observations in the second update, where PDR plays a major role in the calculation of pedestrian positioning; the method of data fusion is PF, the particle weight is determined by the Wi-Fi propagation model, building structure information and output of first-order data fusion.
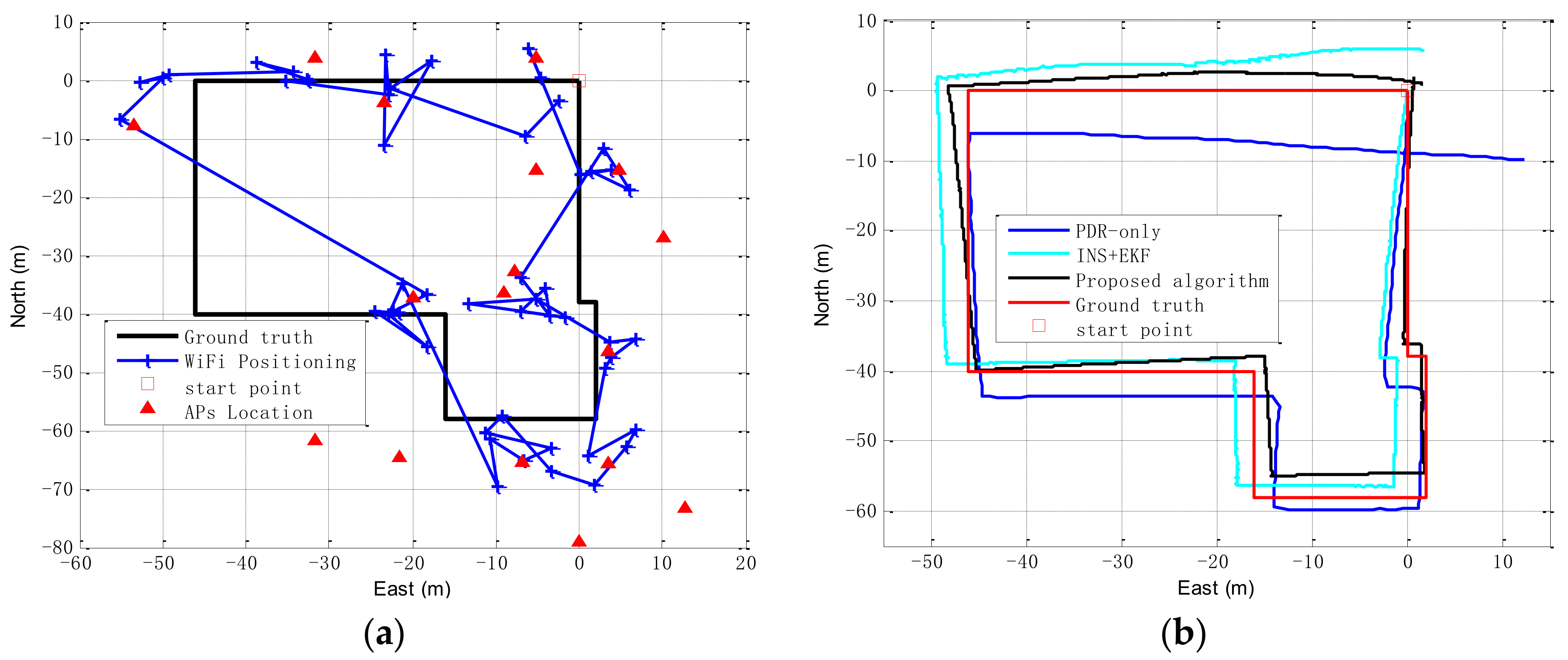
The proposed integrated algorithm was tested in indoor pedestrian experiments to demonstrate its performance, accuracy, and ability in providing an effective solution. By comparing with other positioning algorithms, the experiments demonstrate that mean positioning errors of the proposed two-order Bayesian estimation based on EKF and PF decrease by about 39% when compared with traditional PDR-only, and decrease by about 35% when compared with INS based on EKF. The positioning accuracy will be higher if the distribution of APs is more intensive and reasonable.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}