Optimized Charging Scheduling with Single Mobile Charger for Wireless Rechargeable Sensor Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The effect of the moving speed of the mobile charger:
- (2)
- Previous work failed to neglect the importance of the location of service station:
- (3)
- Non periodic charging problem in WRSN:
- (4)
- How to apply the rest sensor nodes if the residual energy of a part of nodes in the network reaches the threshold.
- (1)
- We propose a new method to determine the optimal location for the service station.
- (2)
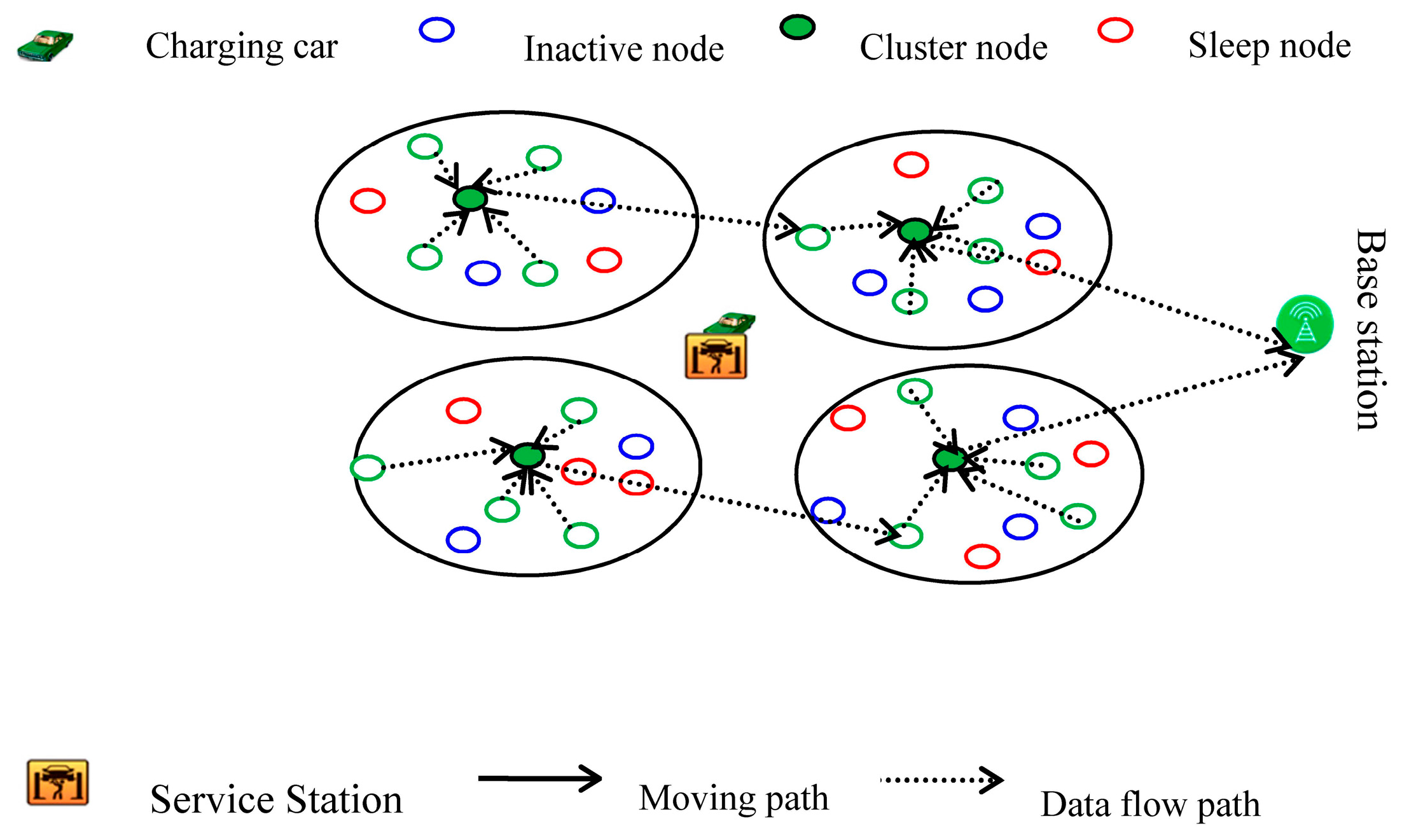
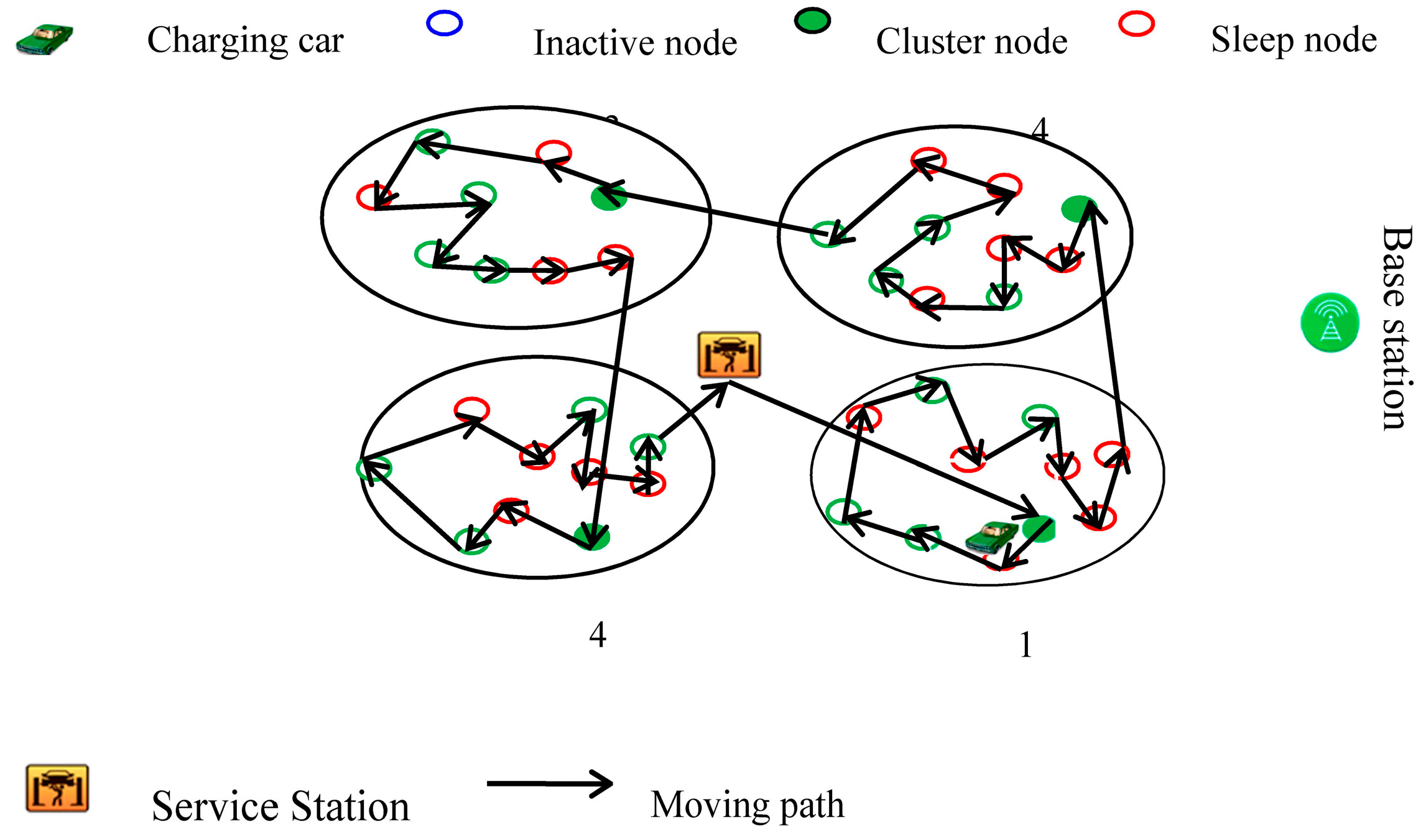
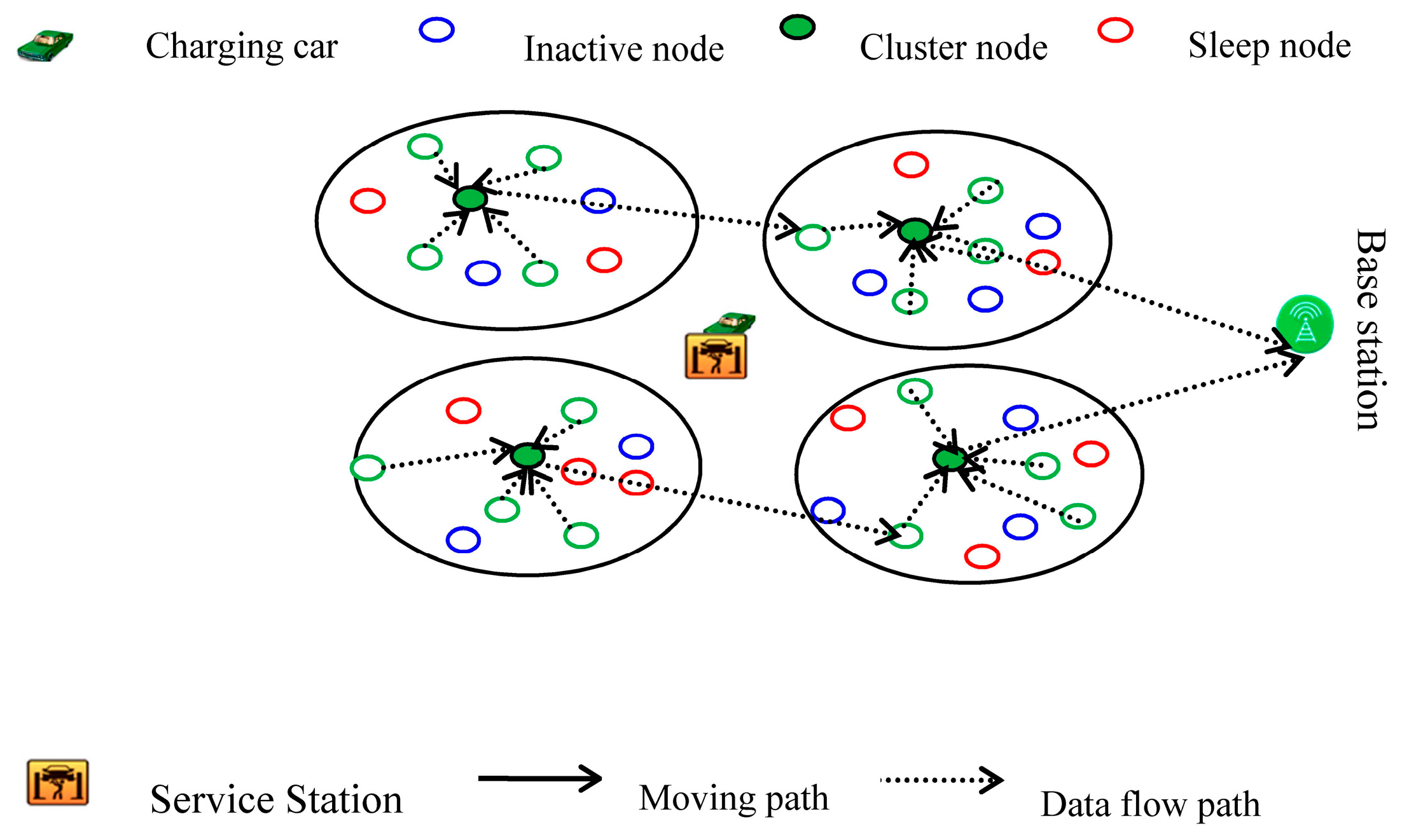
- The WRSN is divided into several sub networks. In the premise of ensuring certain coverage, not all sensor nodes in each sub network are selected for the active nodes. When the residual energy of the sensor node for the active nodes is lower than the threshold value, the sensor node stops working and waits for charging.
2. Related Models and Problem Statement
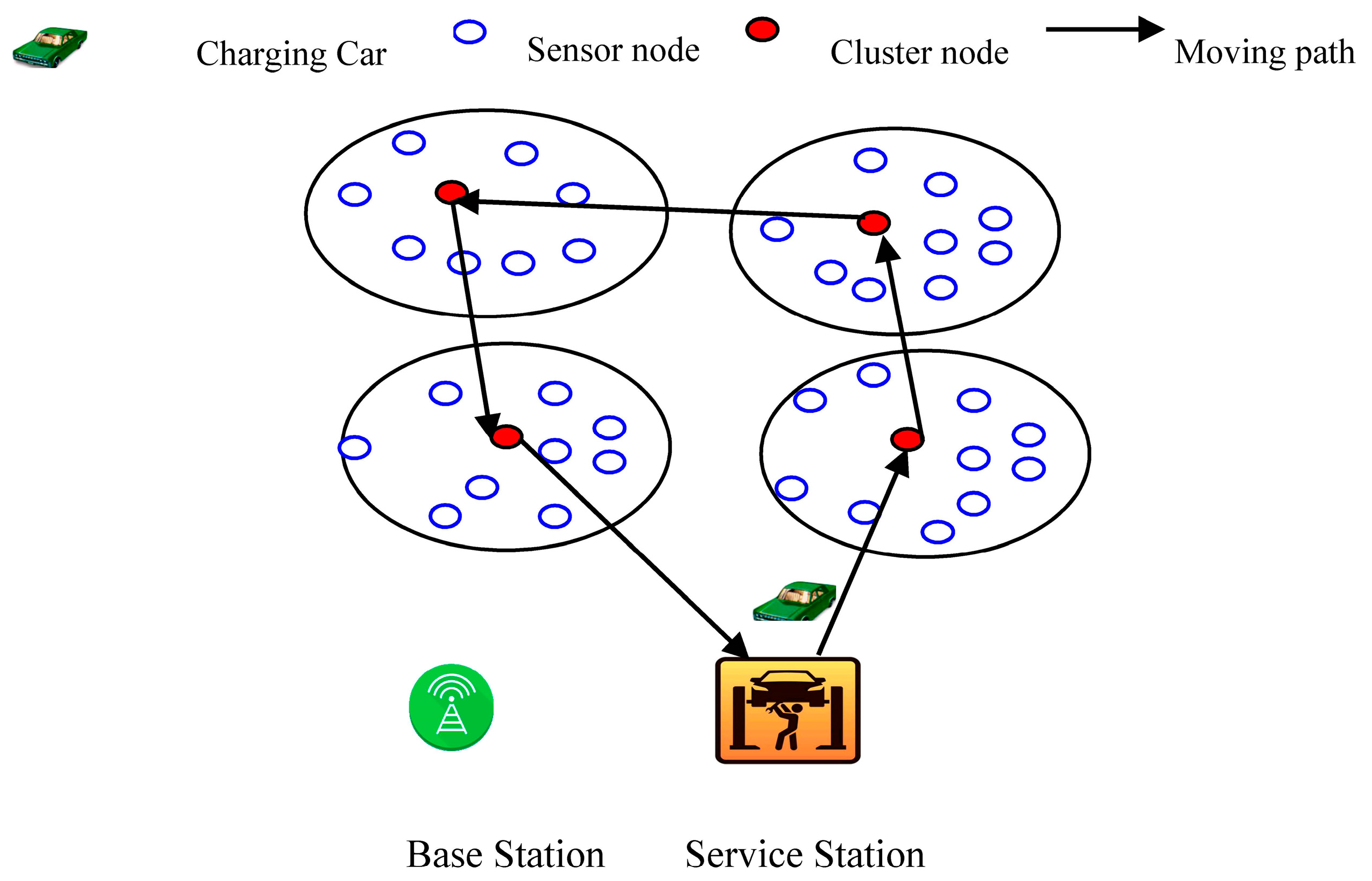
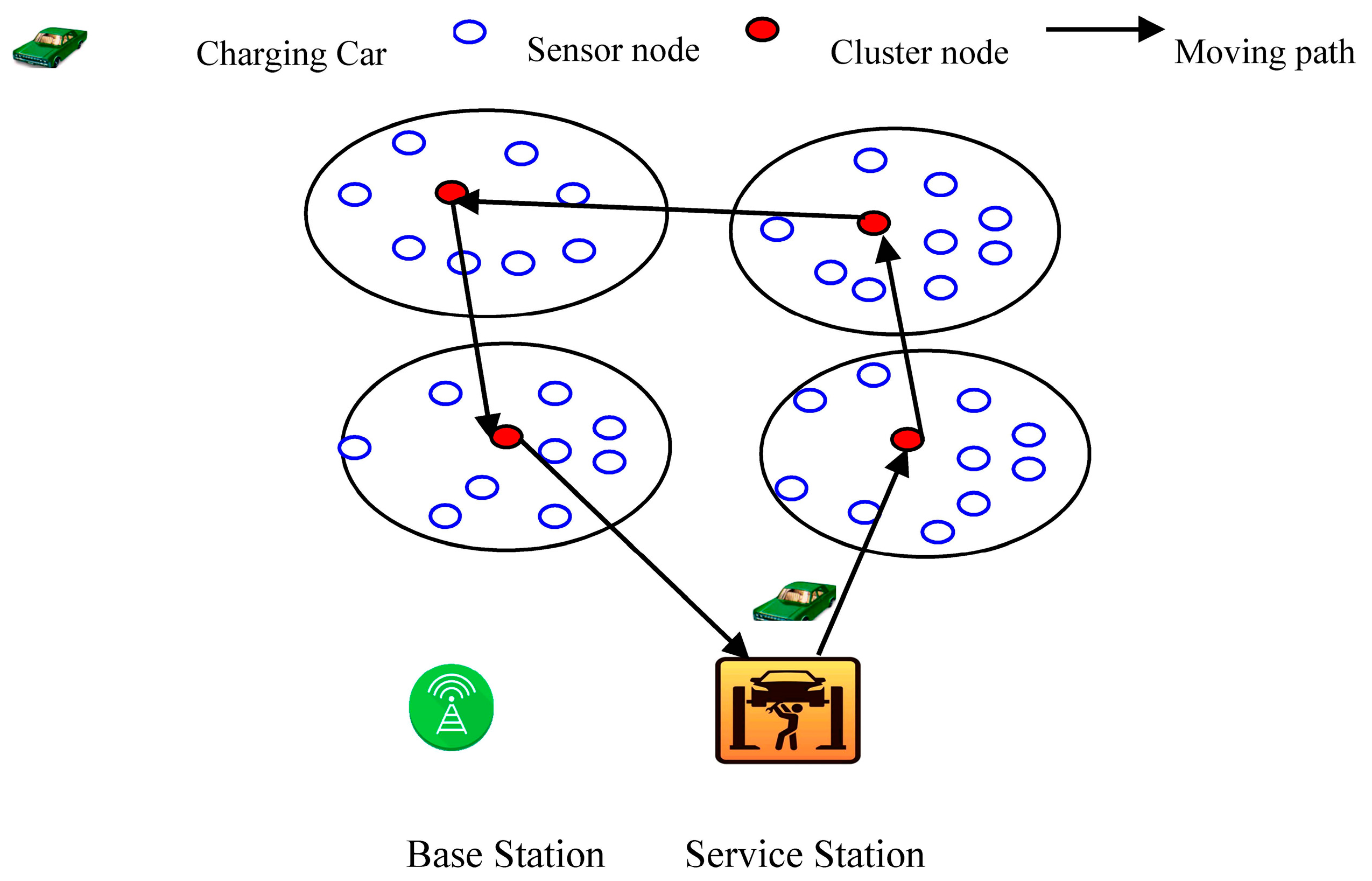
2.1. Network and Charging Model
2.2. The Model of Energy Consumption
- (1)
- When , the formula for energy consumption is expressed as the following equation.
- (2)
- When , the formula for energy consumption is expressed as the following equation.where is a determined value, while and are the attribute parameters of sensor node, and is energy consumption of one sensor node receiving or transmitting 1 bit data. The symbol represents the amount of data that can be sent. Its unit is bit. The symbol is a Boolean variable. When the two nodes transfer data by single hop, the value of is zero; Otherwise, the value of is 1. Symbol represents the distance between the communication nodes.
2.3. Problem Formulation
3. Charging Scheduling Policy
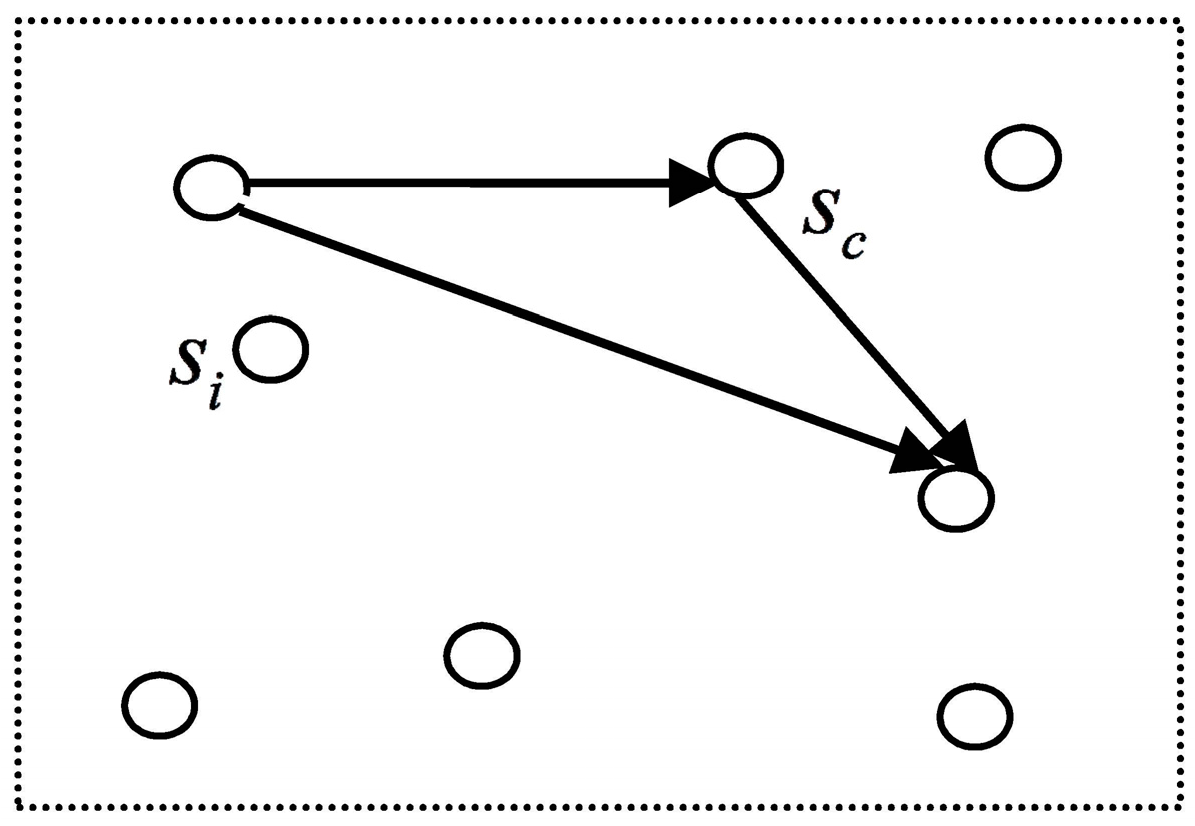
3.1. Location Problem of Service Station
- (1)
- Compute the shortest distance in each sub network using Floyd algorithm.
- (2)
- Calculate the distance between each sensor node and its farthest sensor node . can be expressed as .
- (3)
- Find the minimum , that is to say, .
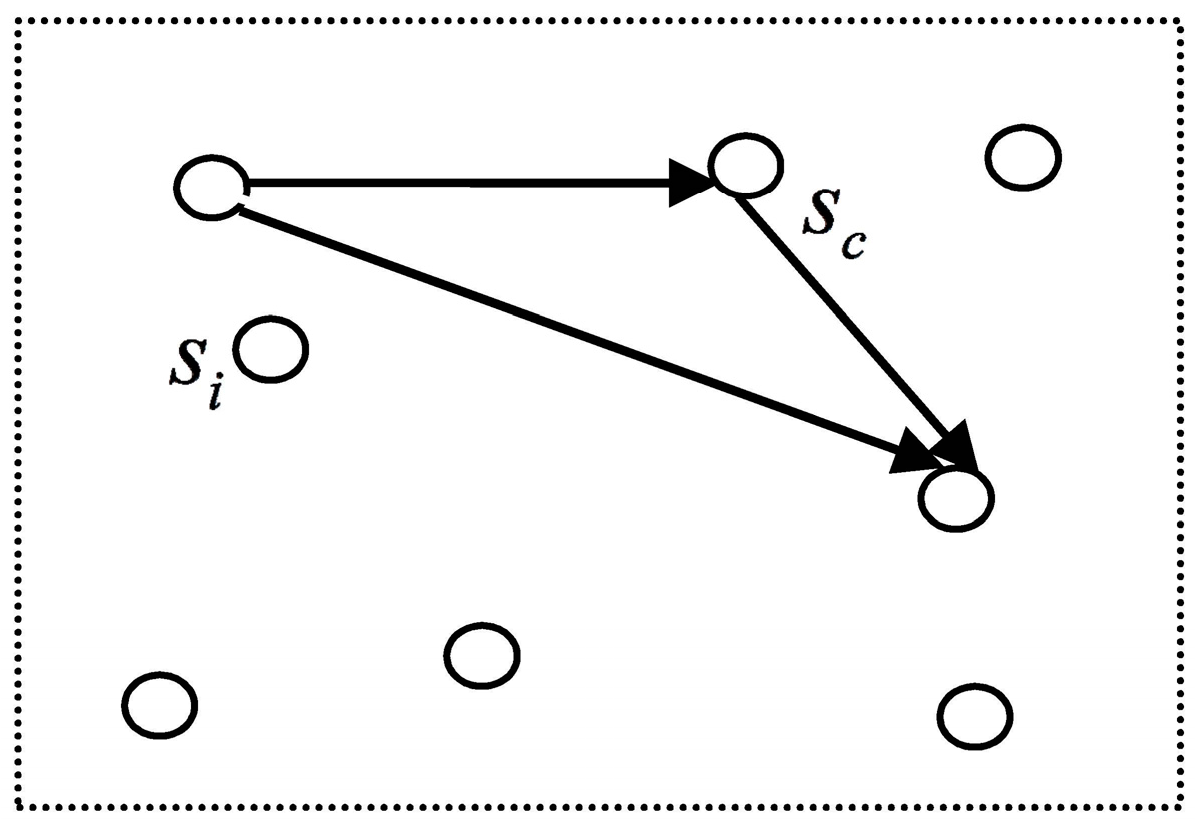
3.2. The Selection of Active Nodes
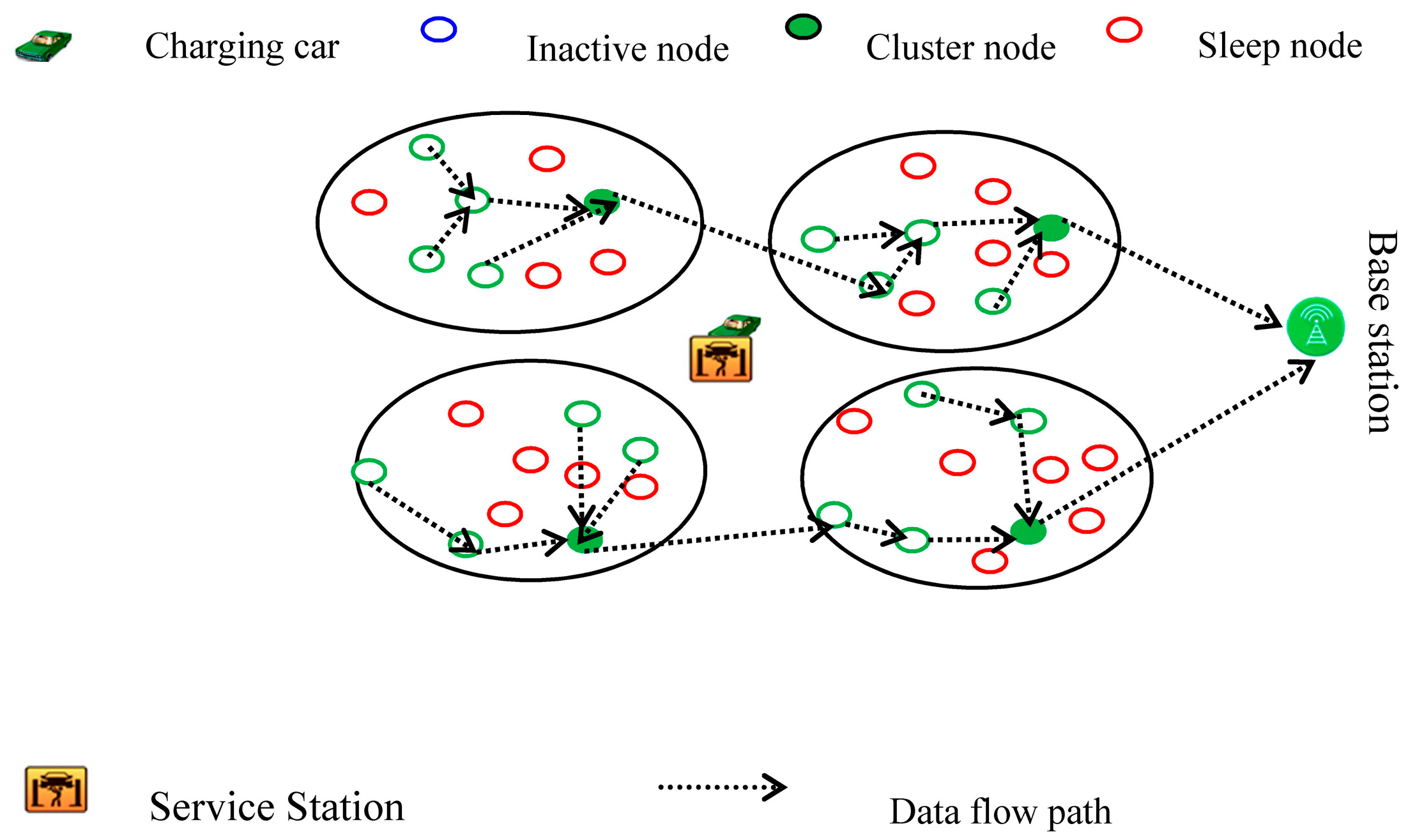
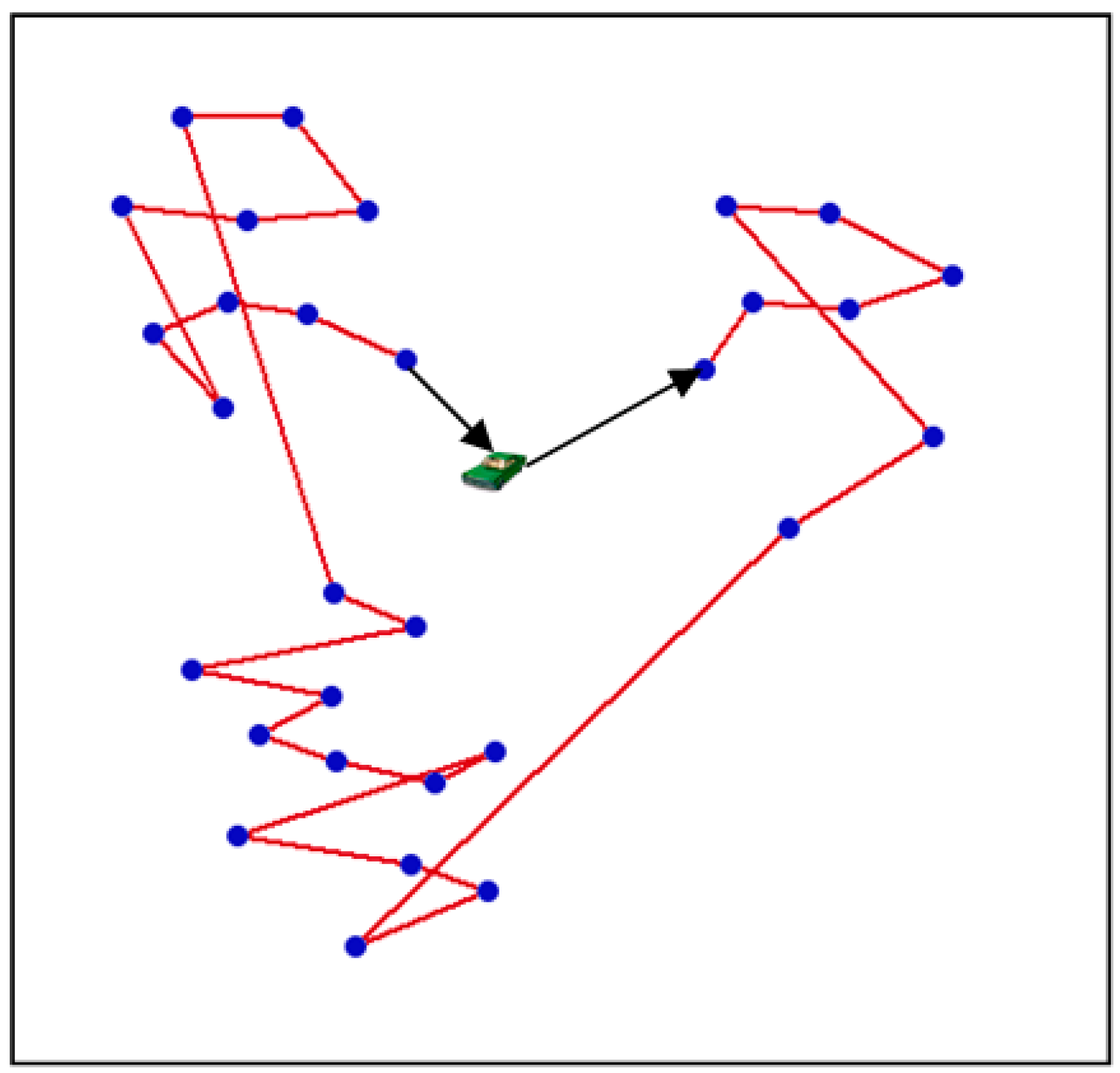
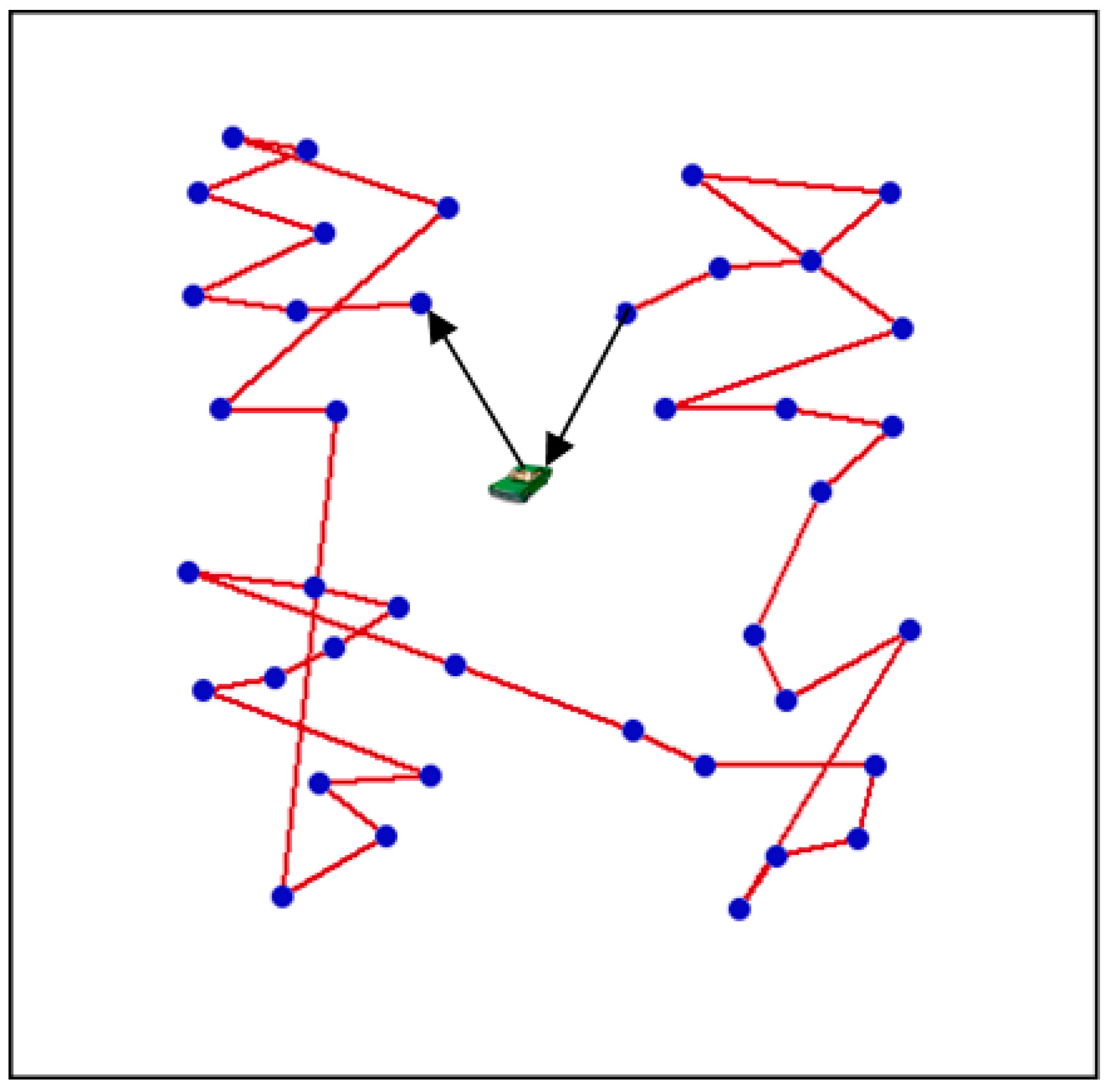
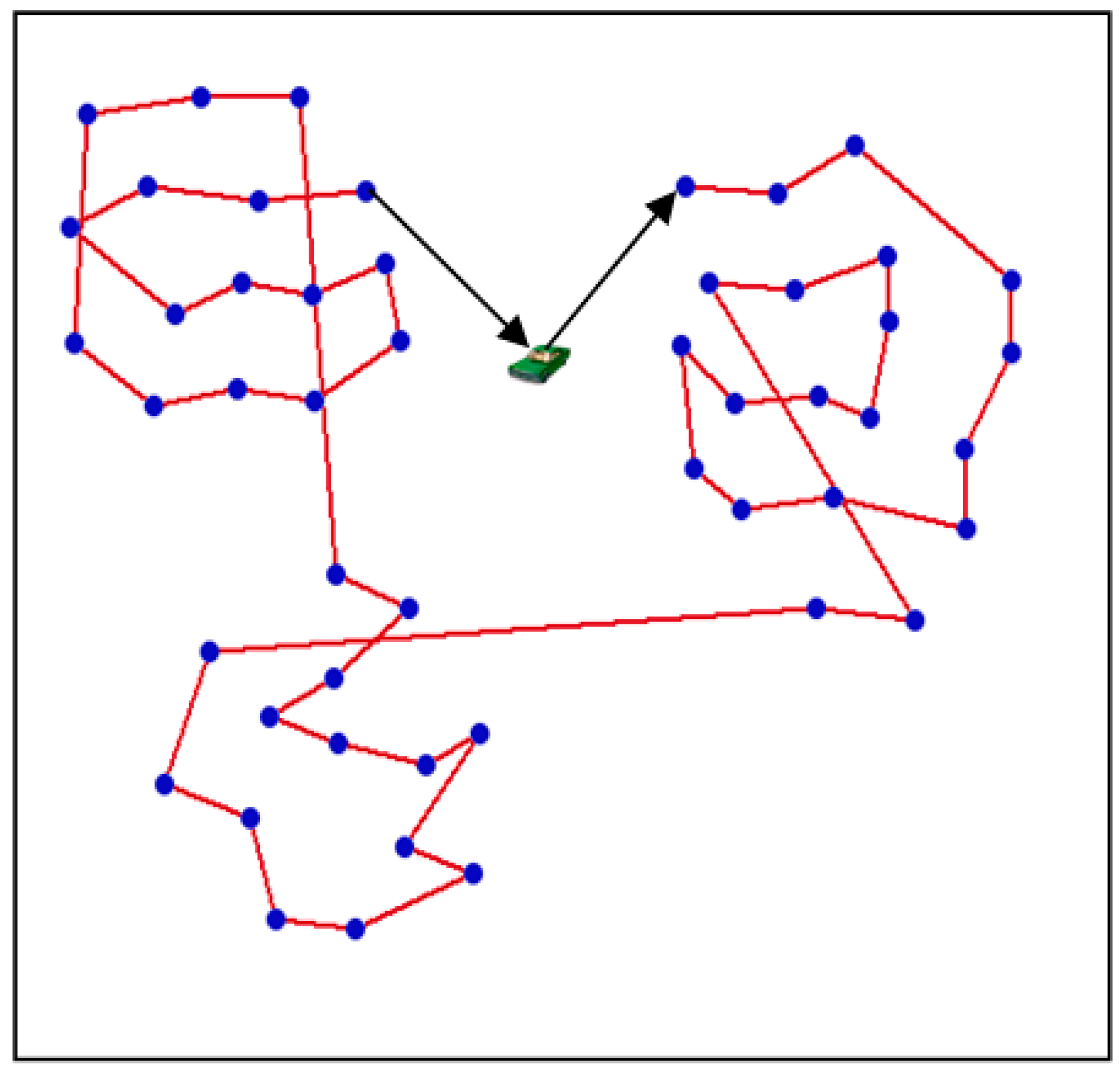
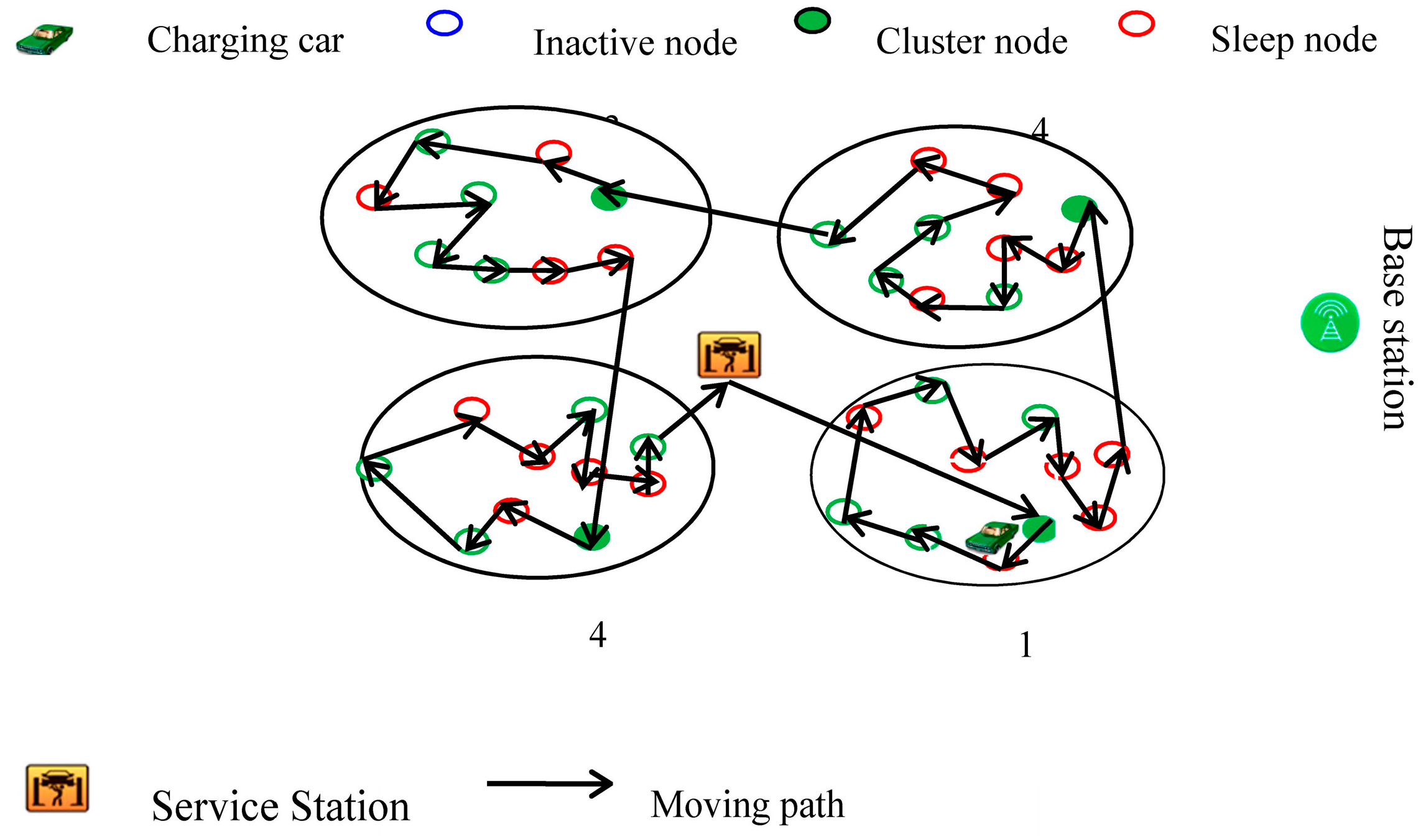
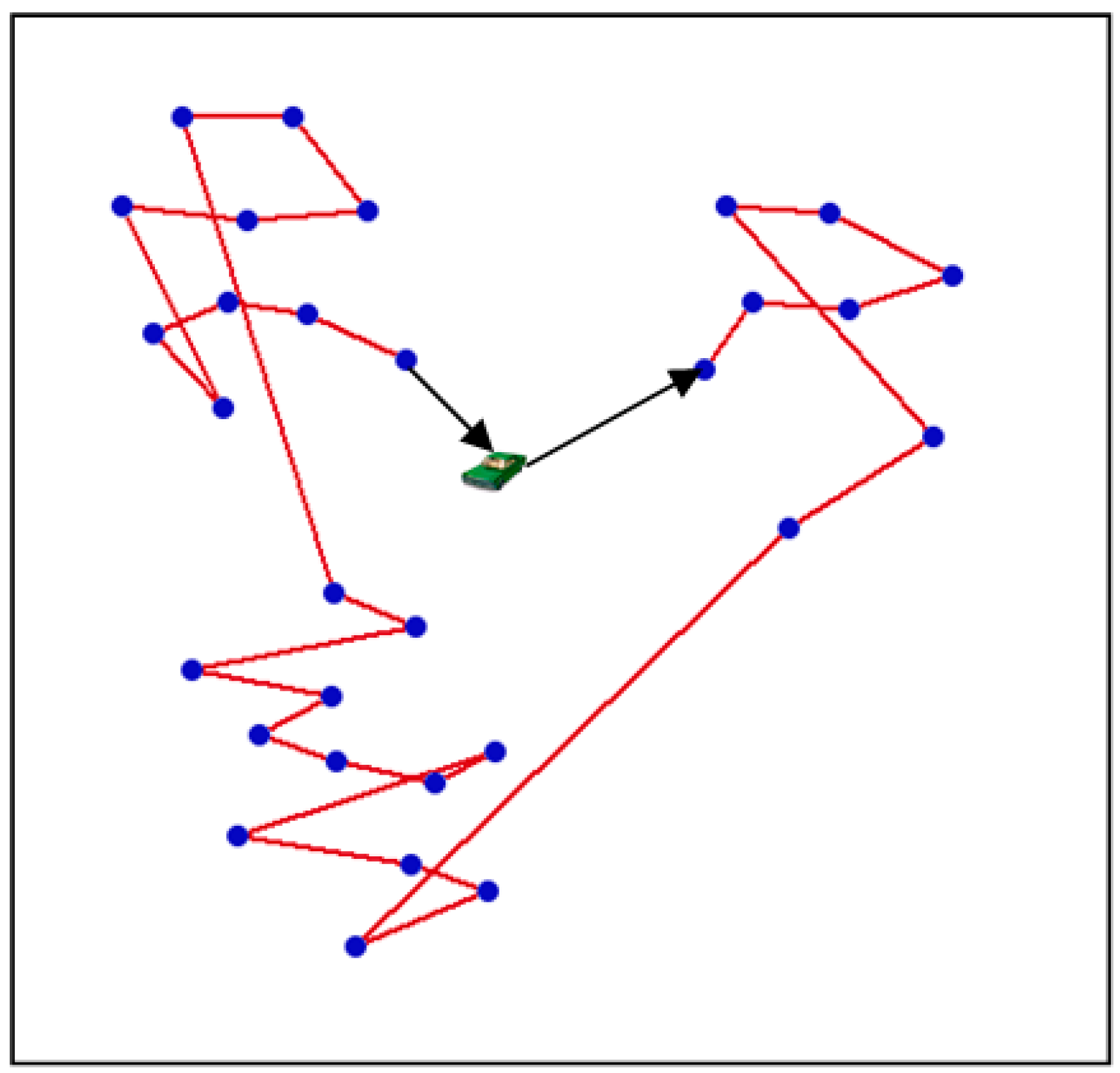
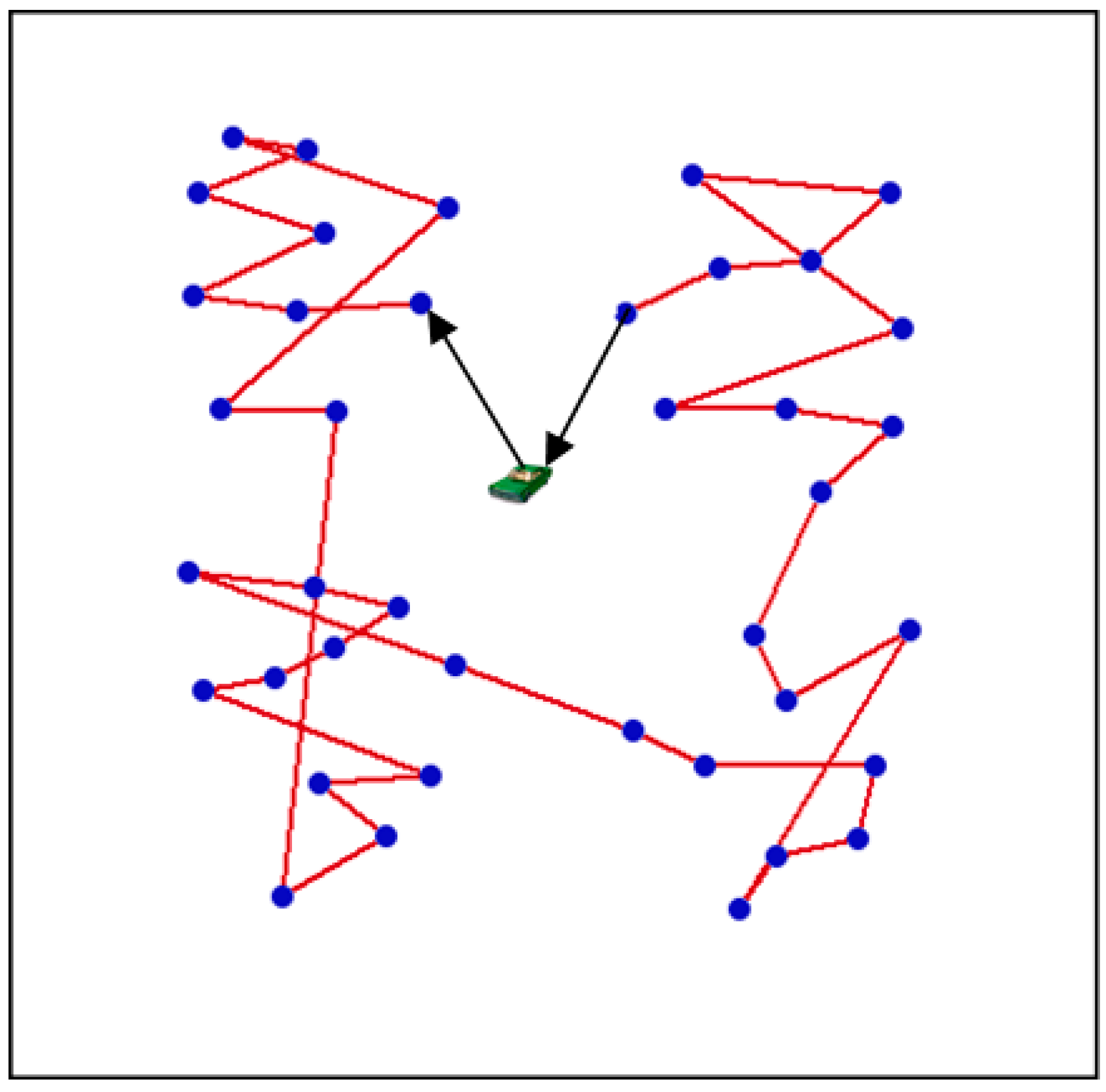
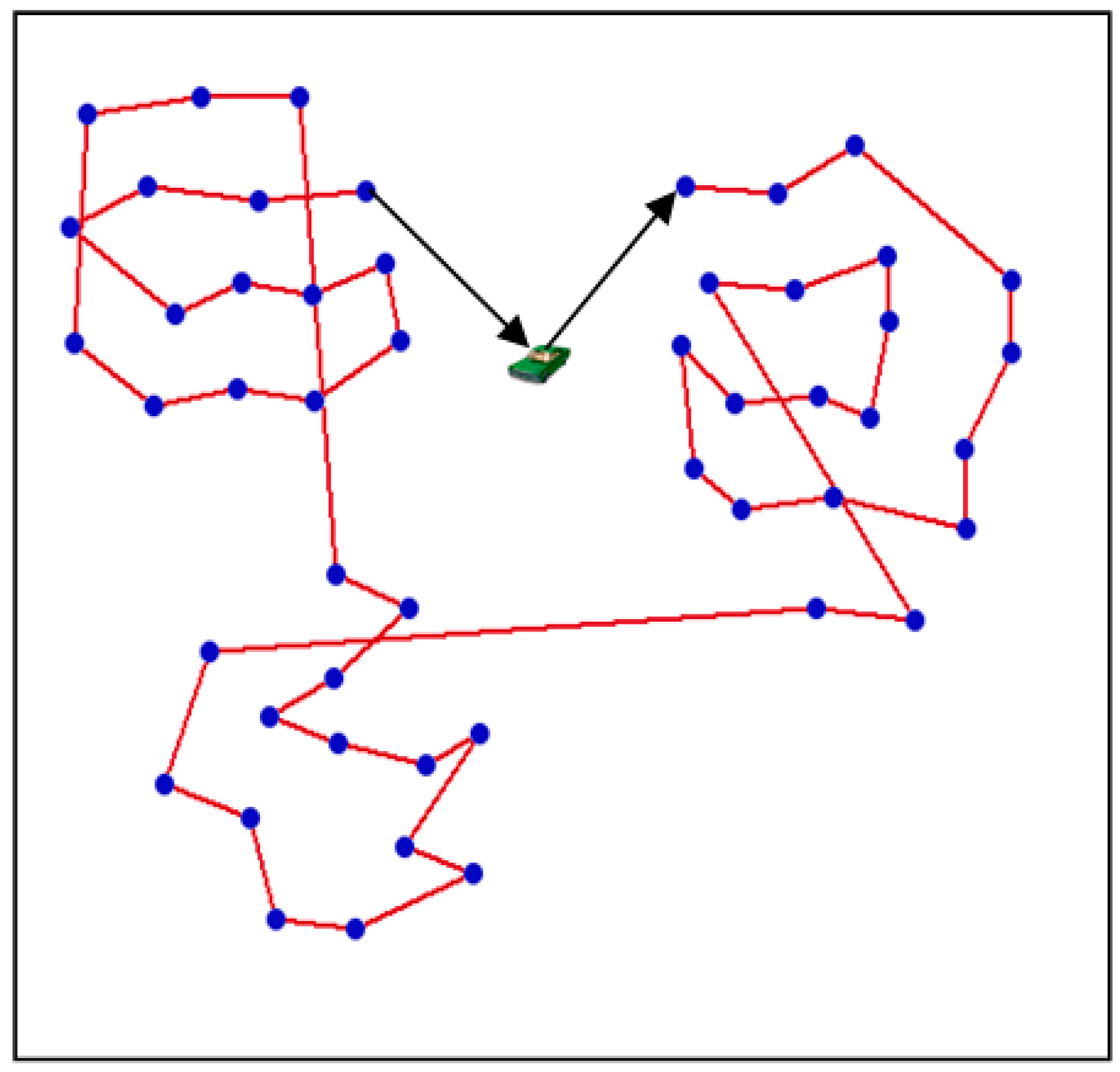
3.3. Optimal Path Selection
- (1)
- Use the principle of proximity to determine the division of sub networks;
- (2)
- Determine the position of the mobile charger;
- (3)
- Determine the active nodes and select cluster nodes in each sub network;
- (4)
- Update the active nodes according to the energy consumption of the node, and update the cluster nodes correspondingly;
- (5)
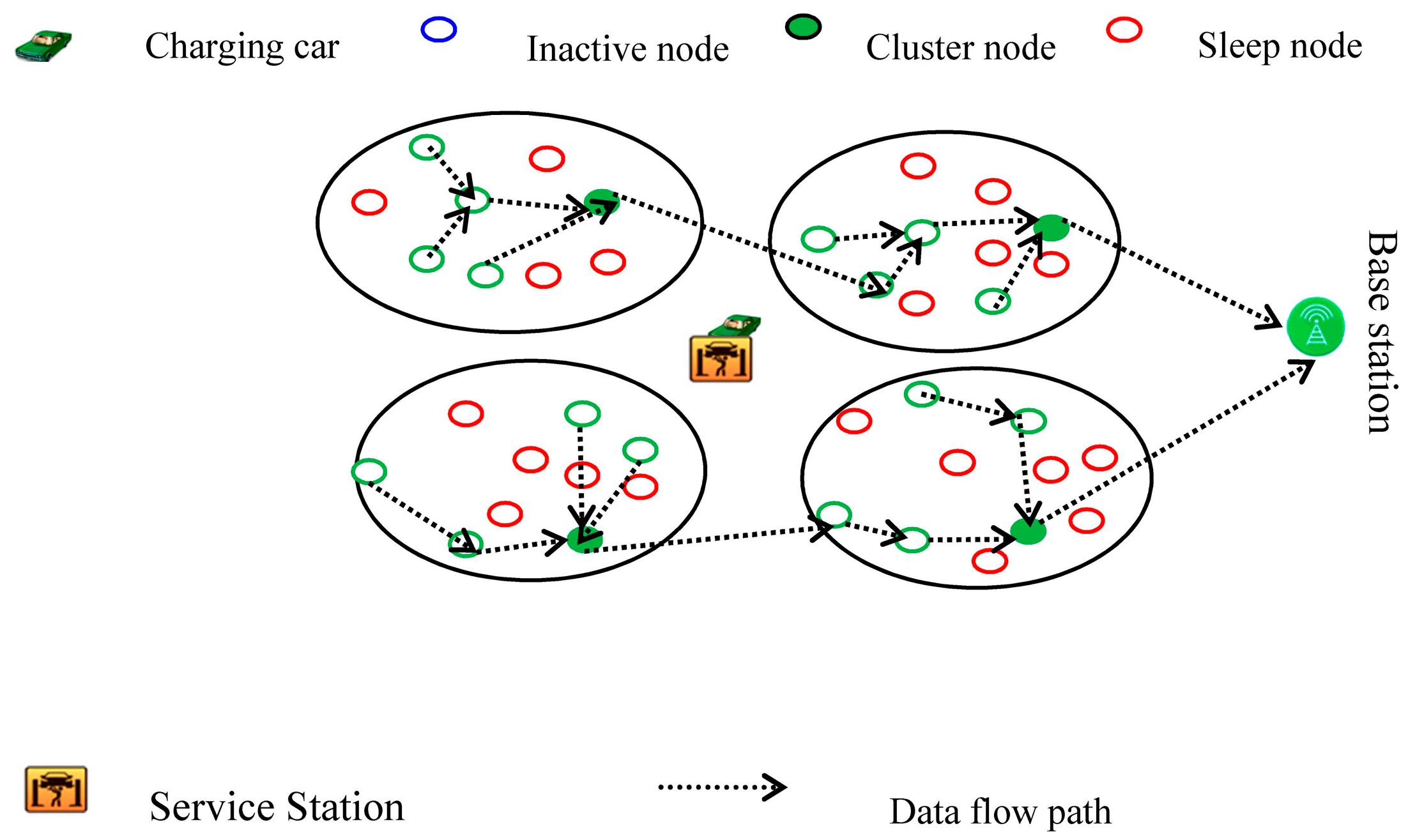
- According to the energy consumption of each sensor node in the sub network and the overall energy consumption in each sub network, the recharging scheduling strategy is determined. In each sub network, the residual energy of the last active nodes is no less than before being charged. It can make full use of the energy of each node;
- (6)
- After finishing the charging nodes, the mobile charger returns to the service station and waits for the next charge.
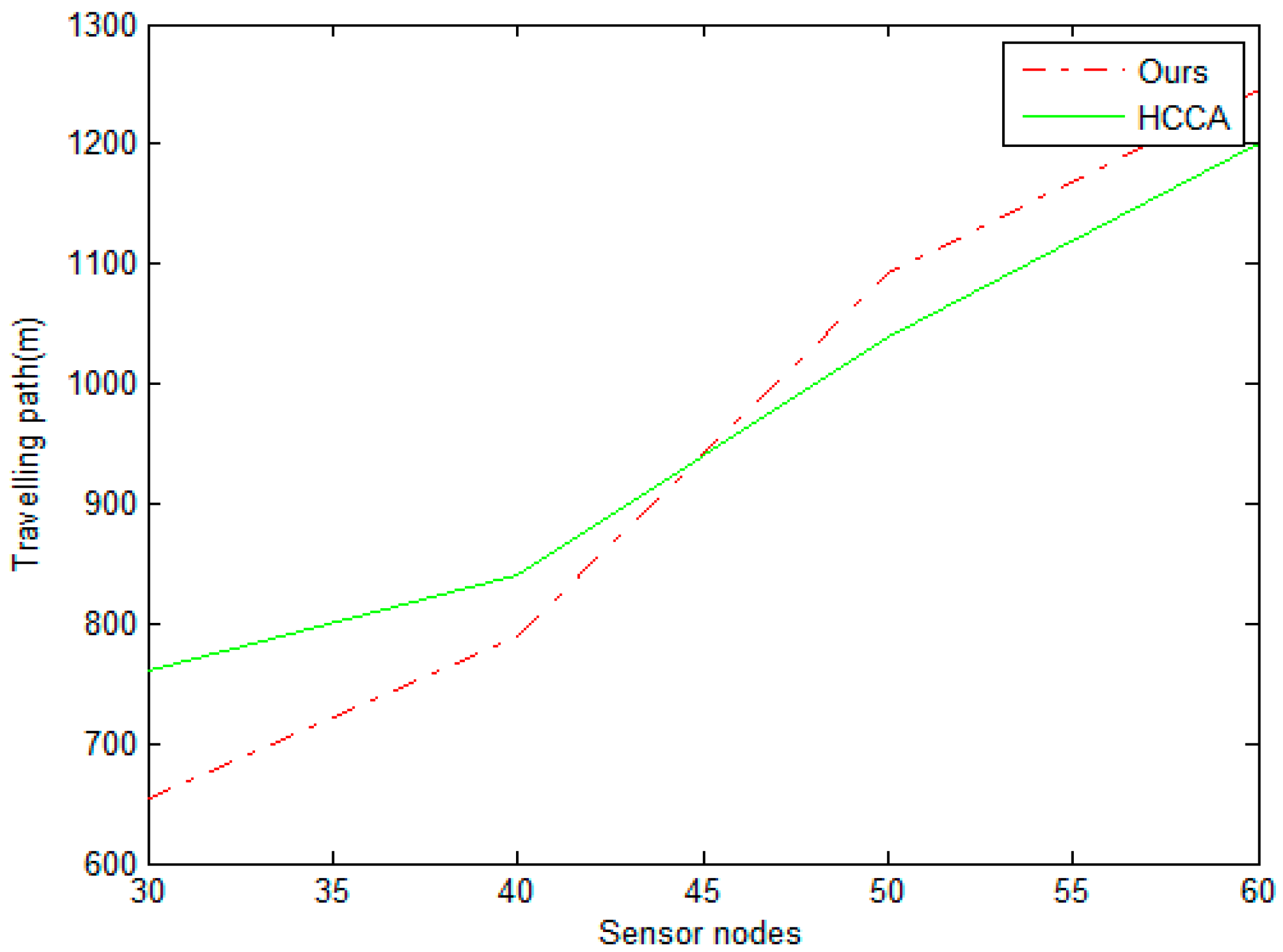
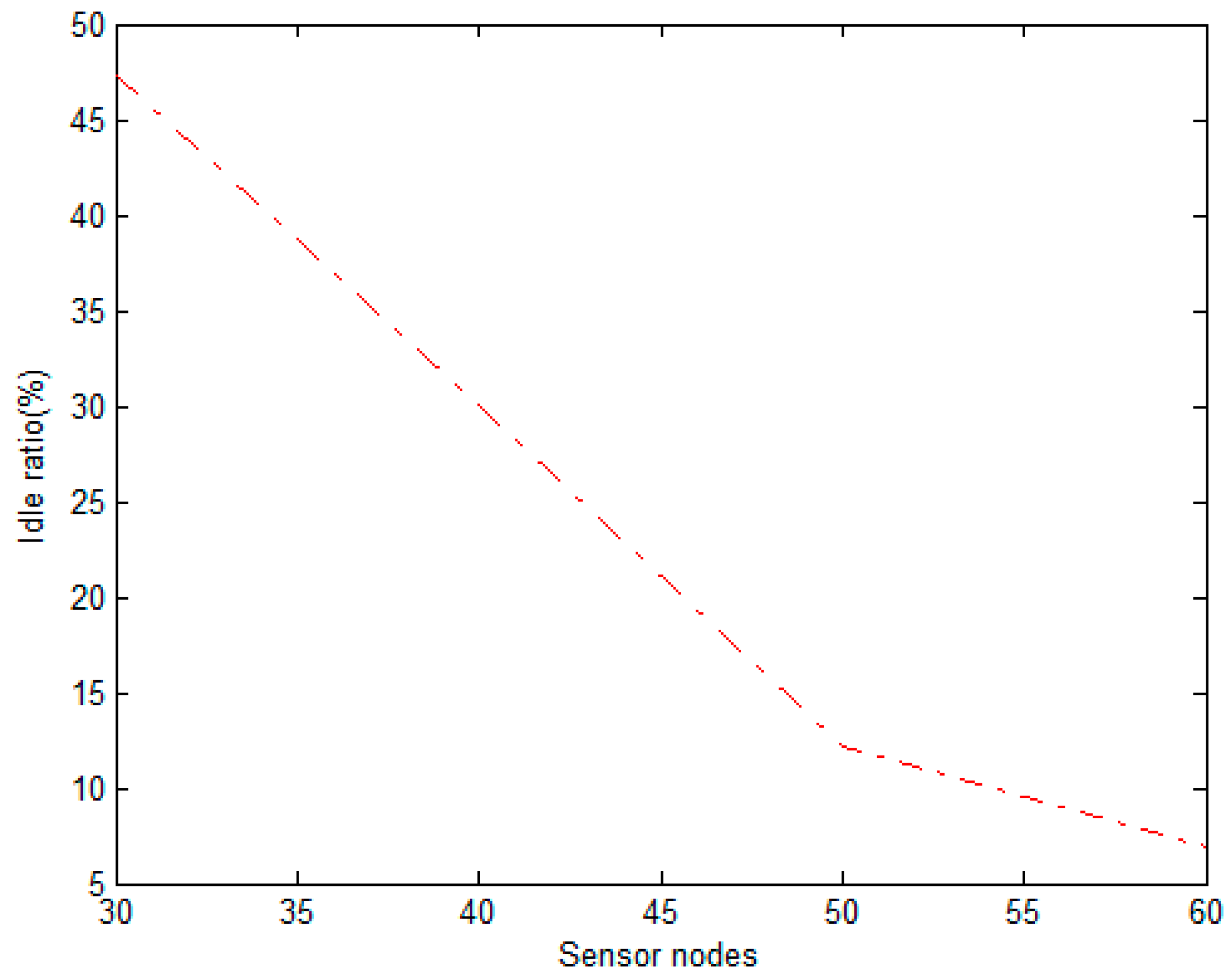
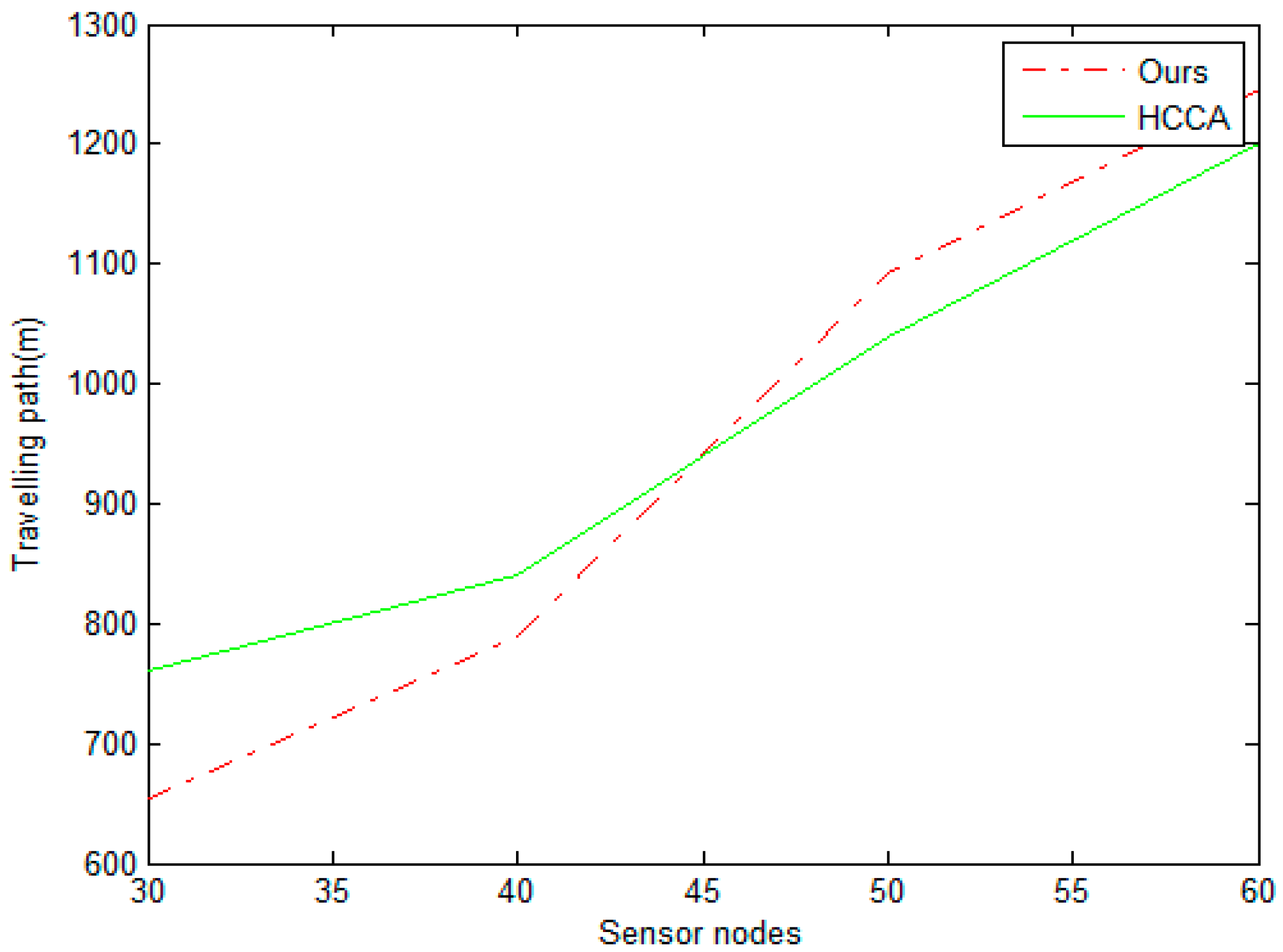
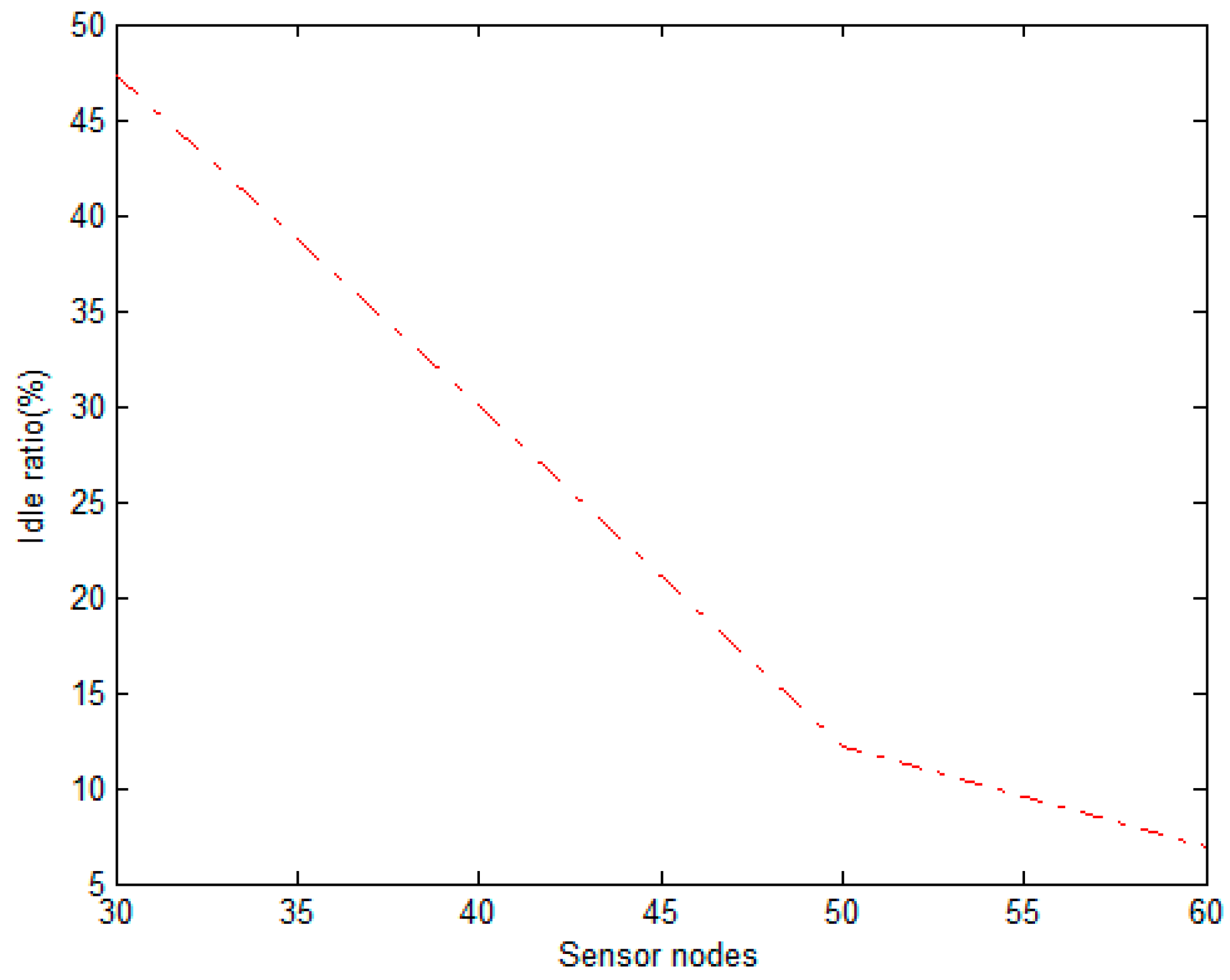
4. Simulation Results
- (1)
- The sensor nodes are fixed.
- (2)
- The sensor nodes send data through single hop or multiple hops.
- (3)
- The sensor nodes know their locations with the help of GPS.
- (4)
- Euclidean distance can be obtained by mobile charger with the help of GPS and location algorithm.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lin, C.; Wu, G.; Xia, F.; Li, M.; Yao, L.; Pei, Z. Energy efficient ant colony algorithms for data aggregation in wireless sensor networks. J. Comput. Syst. Sci. 2012, 78, 1686–1702. [Google Scholar] [CrossRef]
- González-Potes, A.; Mata-López, W.A.; Ochoa-Brust, A.M.; Escobar-del Pozo, C. Smart Control of Multiple Evaporator Systems with Wireless Sensor and Actuator Networks. Energies 2016, 9, 142. [Google Scholar] [CrossRef]
- Amaldi, E.; Capone, M. Design of wireless sensor networks for mobile target detection. IEEE/ACM Trans. Netw. 2012, 20, 784–797. [Google Scholar] [CrossRef]
- Dervis, K.; Selcuk, O. Cluster based wireless sensor network routing using artificial bee colony algorithm. Wirel. Netw. 2012, 18, 847–860. [Google Scholar]
- Geoffrey, W.A. Deploying a wireless sensor network on an active volcano. IEEE Internet Comput. 2006, 10, 18–25. [Google Scholar]
- Kurs, A.; Karalis, A.; Robert, M.; Joannopoulos, J.D.; Fisher, P.; Soljacic, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Xie, L.; Shi, Y.; Hou, Y.T.; Sherali, H.D. Making sensor networks immortal: An energy-renewal approach with wireless power transfer. IEEE/ACM Trans. Netw. 2012, 20, 1748–1761. [Google Scholar] [CrossRef]
- Wang, C.; Yang, Y.; Li, J. Stochastic mobile energy replenishment and adaptive sensor activation for perpetual wireless rechargeable sensor networks. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 974–979. [Google Scholar]
- Guo, S.T.; Wang, C.; Yang, Y.Y. Joint mobile data gathering and energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2014, 12, 2836–2852. [Google Scholar] [CrossRef]
- Liu, B.H.; Nguyen, N.T.; Pham, V.T.; Lin, Y.X. Novel methods for energy charging and data collection in wireless rechargeable sensor networks. Int. J. Commun. Syst. 2015, 30, e3050. [Google Scholar] [CrossRef]
- Wang, C.; Li, J.; Ye, F.; Yang, Y. Multi-vehicle coordination for wireless energy replenishment in sensor networks. In Proceedings of the 2013 IEEE 27th International Symposium on I Parallel & Distributed Processing (IPDPS), Boston, MA, USA, 20–24 May 2013; pp. 1101–1111. [Google Scholar]
- He, L.; Fu, L.; Zheng, L.; Gu, Y.; Cheng, P.; Chen, J.; Pan, J. ESync: An energy synchronized charging protocol for rechargeable wireless sensor networks. In Proceedings of the 15th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Philadelphia, PA, USA, 11–14 August 2014; pp. 247–256. [Google Scholar]
- Guo, S.T.; Wang, C.; Yang, Y.Y. Mobile data gathering with wireless energy replenishment in rechargeable sensor networks. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Turin, Italy, 14–19 April 2013; pp. 1932–1940. [Google Scholar]
- Li, J.; Zhao, M.; Yang, Y. OWER-MDG: A novel energy replenishment and data gathering mechanism in wireless rechargeable sensor networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 5350–5355. [Google Scholar]
- Zhao, M.; Li, J.; Yang, Y. A framework of joint mobile energy replenishment and data gathering in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2014, 12, 2689–2705. [Google Scholar] [CrossRef]
- Angelopoulos, C.M.; Nikoletseas, S.E.; Raptis, T.P. Wireless energy transfer in sensor networks with adaptive limited knowledge protocols. Comput. Netw. 2014, 70, 113–141. [Google Scholar] [CrossRef]
- Lin, C.; Wu, G.W.; Obaidat, M.S.; Yu, C.W. Clustering and splitting charging algorithms for large scaled wireless rechargeable sensor networks. J. Syst. Softw. 2016, 113, 381–394. [Google Scholar] [CrossRef]
- Madhja, A.; Nikoletseas, S.; Raptis, T.P. Distributed wireless power transfer in sensor networks with multiple mobile chargers. Comput. Netw. 2015, 80, 89–108. [Google Scholar] [CrossRef]
- Dai, H.; Wu, X.; Chen, G.; Xu, L.; Lin, S. Minimizing the number of mobile chargers for large-scale wireless recharge able sensor networks. Comput. Commun. 2014, 46, 54–65. [Google Scholar] [CrossRef]
- Madhja, A.; Nikoletseas, S.; Raptis, T.P. Hierarchical, collaborative wireless energy transfer in sensor networks with multiple Mobile Chargers. Comput. Netw. 2016, 97, 98–112. [Google Scholar] [CrossRef]
- Cheng, P.; He, S.; Jiang, F.; Gu, Y.; Chen, J. Optimal scheduling for quality of monitoring in wireless rechargeable sensor networks. IEEE Trans. Wirel. Commun. 2013, 12, 3072–3084. [Google Scholar] [CrossRef]
- Heinzelman, W.B.; Chandrakasen, A.P.; Balakrishnan, H. Application-specific protocol architecture for wireless micro sensor networks. IEEE Trans. Wirel. Commun. 2002, 4, 660–670. [Google Scholar] [CrossRef]
- Floyd, R.W. Algorithm 97: Shortest path. Commun. ACM 1962, 6, 345. [Google Scholar] [CrossRef]

© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Kong, F.; Wang, M.; Wang, H. Optimized Charging Scheduling with Single Mobile Charger for Wireless Rechargeable Sensor Networks. Symmetry 2017, 9, 285. https://doi.org/10.3390/sym9110285
Wang Q, Kong F, Wang M, Wang H. Optimized Charging Scheduling with Single Mobile Charger for Wireless Rechargeable Sensor Networks. Symmetry. 2017; 9(11):285. https://doi.org/10.3390/sym9110285
Chicago/Turabian StyleWang, Qihua, Fanzhi Kong, Meng Wang, and Huaqun Wang. 2017. "Optimized Charging Scheduling with Single Mobile Charger for Wireless Rechargeable Sensor Networks" Symmetry 9, no. 11: 285. https://doi.org/10.3390/sym9110285
APA StyleWang, Q., Kong, F., Wang, M., & Wang, H. (2017). Optimized Charging Scheduling with Single Mobile Charger for Wireless Rechargeable Sensor Networks. Symmetry, 9(11), 285. https://doi.org/10.3390/sym9110285