1. Introduction
In this paper, we present the new generalized skein invariants of links, , and , based on the regular isotopy version of the Homflypt polynomial, the Dubrovnik polynomial and the Kauffman polynomial, respectively (Theorems 1–3). A link invariant is skein invariant if it can be computed on each link solely by the use of skein relations and a set of initial conditions. The generalized invariants are evaluated via a two-level procedure: for a given link we first untangle its compound knots using the skein relation of the corresponding basic invariant H, D or K and only then we evaluate on unions of unlinked knots by applying a new rule, which is based on the evaluation of H, D and K respectively. In particular, on knots (that is, one-component links) each one of the generalized invariants has the same evaluation as its underlying basic invariant.
We then show that each generalized invariant can be reformulated in terms of a closed formula, involving summation over evaluations of sublinks of the given link (Theorems 5–7). It is remarkable that the generalized invariants have two such distinct faces, as skein invariants and as closed combinatorial formuli. In this paper, we present both of these points of view and how they are related to state summations and possible relationships with statistical mechanics and applications. These constructions alter the philosophy of classical skein-theoretic techniques, whereby mixed as well as self-crossings in a link diagram would get indiscriminately switched. Using a known skein invariant, one first unlinks all components using the skein relation and then one evaluates on unions of unlinked knots using that skein invariant and at the same time introducing a new variable. This approach could find applications in physical systems where different constituents need to be separated first.
This paper is based on [
1] where the reader can find more detailed treatment of much of the theory.
There are not many known skein link invariants in the literature. Skein invariants include: the Alexander–Conway polynomial [
2,
3], the Jones polynomial [
4], and the Homflypt polynomial [
5,
6,
7,
8], which specializes to both the Alexander–Conway and the Jones polynomial; there is also the bracket polynomial [
9], the Brandt–Lickorish–Millett–Ho polynomial [
10], the Dubrovnik polynomial and the Kauffman polynomial [
11], which specializes to both the bracket and the Brandt–Lickorish–Millett–Ho polynomial. Finally, we have the Juyumaya–Lambropoulou family of invariants
,
, for any non-empty subset
D of
[
12], and the analogous Chlouveraki–Juyumaya–Karvounis–Lambropoulou invariants
and their 3-variable generalization
[
13]. In fact, this last invariant
was our motivation for constructing the generalized invariants. The invariant
is in fact the regular isotopy version of the invariant
and Theorem 1 can be used to provide a self-contained skein theoretic proof of its existence.
The invariant
was discovered via the following path: In [
12] a family of framed link invariants was constructed via a Markov trace on the Yokonuma–Hecke algebras [
14], which restrict to the family of classical link invariants
[
15]. These were studied in [
15,
16], especially their relation to the Homflypt polynomial,
P, but topological comparison had not been possible due to algebraic and diagrammatic difficulties. In [
13,
17,
18] another presentation [
19] was used for the Yokonuma–Hecke algebra and the related classical link invariants were now denoted
. The invariants
were then recovered via the skein relation of
P that can only apply to mixed crossings of a link [
13] and they were shown to be distinct from
P on
links, for
, but topologically equivalent to
P on
knots [
13,
17] (hence also distinct from the Kauffman polynomial). Finally, the family of invariants
, which includes
P for
, was generalized to the new 3-variable skein link invariant
[
13], which is also related to the theory of tied links [
20]. A succinct exposition of the above results can be found in [
21]. These constructions opened the way to new research directions. Cf. [
12,
13,
15,
16,
17,
19,
20,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38].
Further, in [
13] Appendix B, W.B.R. Lickorish provides a closed combinatorial formula for the definition of the invariant
, showing that it is a mixture of Homflypt polynomials and linking numbers of sublinks of a given link. The combinatorial formuli (
7), (
15) and (
16) for the generalized invariants are inspired by the Lickorish formula. These closed formuli are remarkable summations of evaluations on sublinks with certain coefficients, that surprisingly satisfy the analogous mixed skein relations, so they can be regarded by themselves as definitions of the invariants
,
and
respectively. Formula (
7) shows that the strength of
against
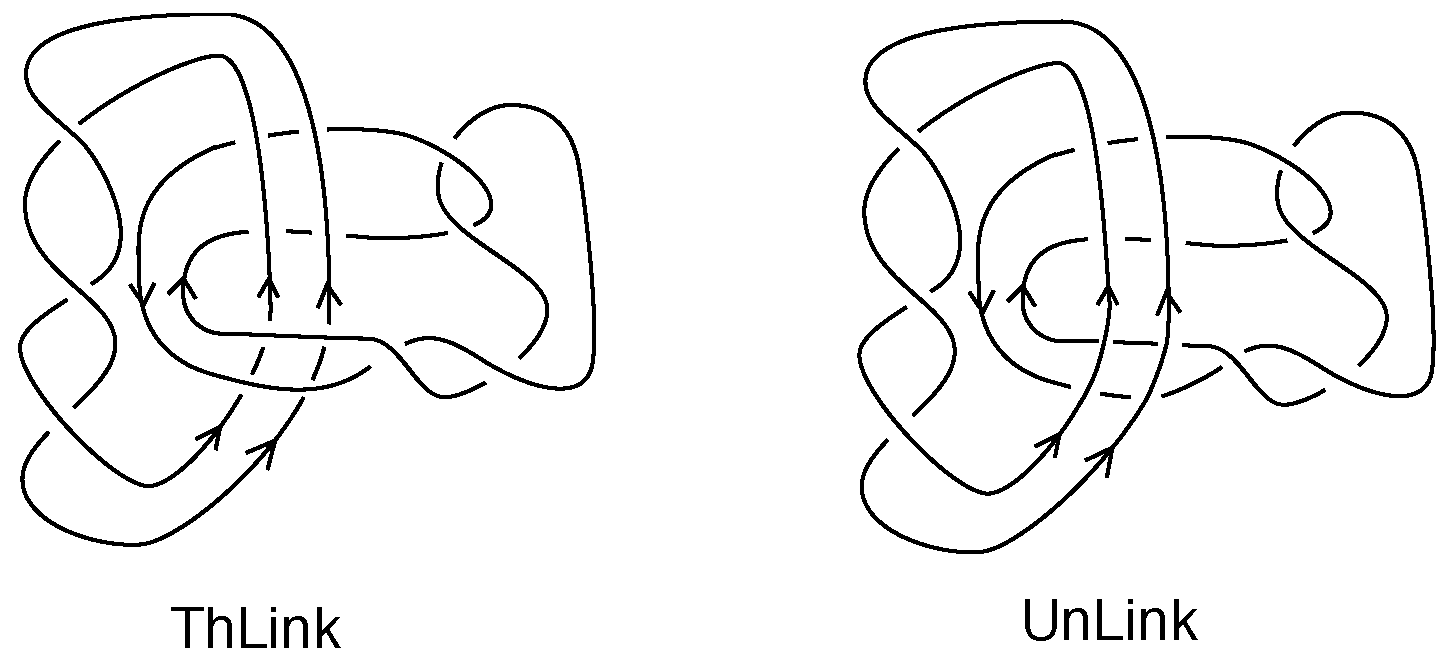
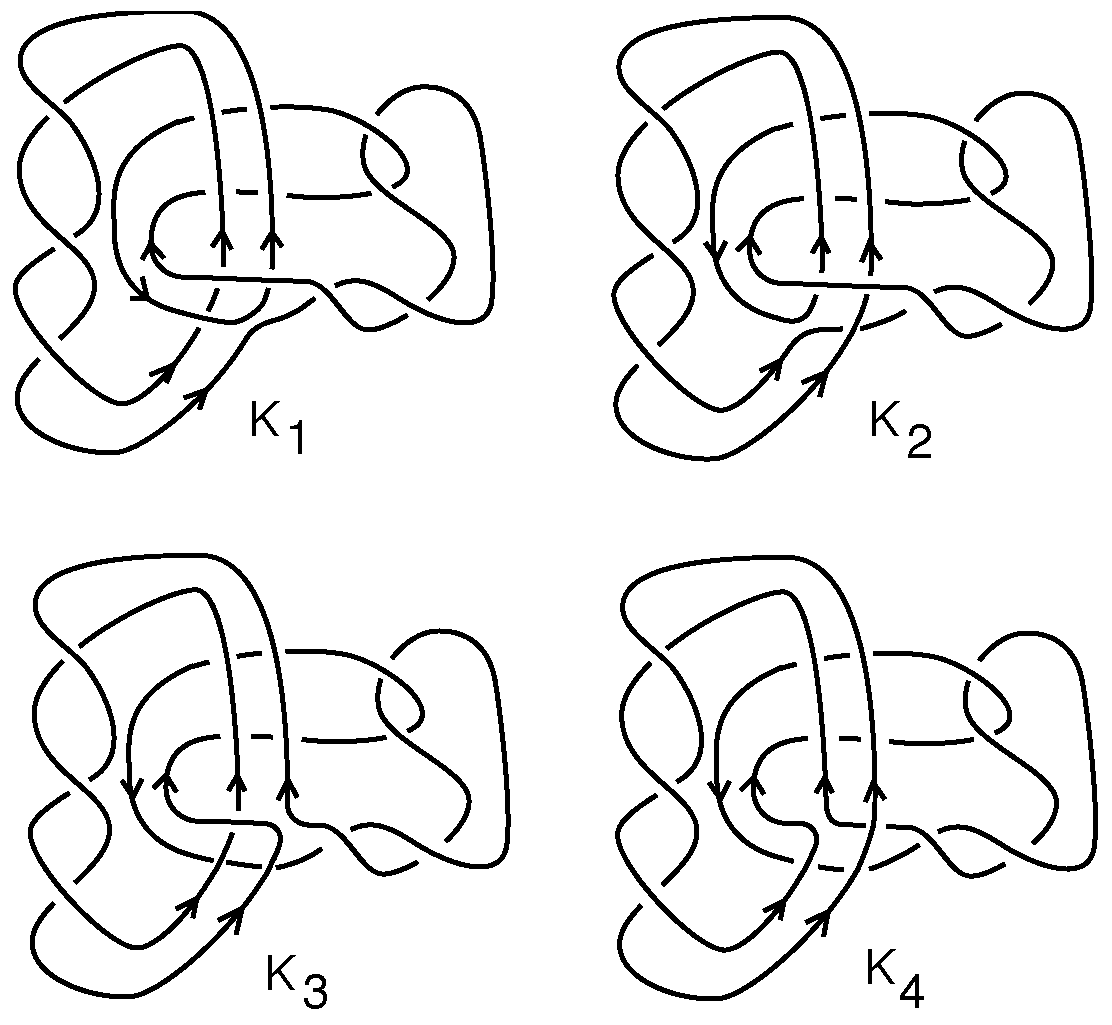
H comes from its ability to distinguish certain sublinks of Homflypt-equivalent links. In [
13] a list of six 3-component links are given, which are Homflypt equivalent but are distinguished by the invariant
and thus also by
.
We proceed with constructing state sum models associated to the generalized skein invariants. A
state sum model is a sum over evaluations of combinatorial configurations (the states) related to the given link diagram, such that this sum is equal to the invariant that we wish to compute. The state sums are based on the
skein template algorithm, as explained in [
39,
40], which formalizes the skein theoretic process as an analogue of a statistical mechanics partition function and produces the states to be evaluated. Our state sums use the skein calculation process for the invariants, but have a new property in the present context. They have a double level due to the combination in our invariants of a skein calculation combined with the evaluation of a specific invariant on the knots that are at the bottom of the skein process. If we choose a state sum evaluation of a different kind for this specific invariant, then we obtain a double-level state sum of our new invariant.
The paper concludes with a discussion about possible relationships with reconnection in vortices in fluids, strand switching and replication of DNA, particularly the possible relations with the replication of Kinetoplast DNA, and we discuss the possibility of multiple levels in the quantum Hall effect where one considers the braiding of quasi-particles that are themselves physical subsystems composed of multiple electron vortices centered about magnetic field lines.
The paper is organized as follows: In
Section 2 we present the skein theoretic setting of the new skein 3-variable invariants that generalize the regular isotopy version of the Homflypt, the Dubrovnik and the Kauffman polynomials. In
Section 3 we give the ambient isotopy reformulations of the generalized link invariants. In
Section 4 we adapt the combinatorial formula of Lickorish to our regular isotopy setting for the generalized skein invariants. In
Section 5 we define associated state sum models for the new invariants, while in
Section 6 the idea about double state summations is articulated. Finally, in
Section 7 we discuss the context of statistical mechanics models and partition functions in relation to multiple level state summations and in
Section 8 we speculate about possible applications for these ideas.
2. The Skein-Theoretic Setting for the Generalized Invariants
In this section, we define the general regular isotopy invariant for links, , and , which generalize the regular isotopy version of the Homflypt polynomial, H, the Dubrovnik polynomial, D, and the Kauffman polynomial, K, respectively.
As usual, an oriented link is a link with an orientation specified for each component. In addition, a link diagram is a projection of a link on the plane with only finitely many double points, the crossings, which are endowed with information ‘under/over’. Two link diagrams are regularly isotopic if they differ by planar isotopy and by Reidemeister moves II and III (with all variations of orientations in the case of oriented diagrams). A mixed crossing is a crossing between different components.
2.1. Defining
Let
denote the set of classical oriented link diagrams. Let
be an oriented diagram with a positive crossing specified and let
be the same diagram but with that crossing switched. Let also
indicate the same diagram but with the smoothing which is compatible with the orientations of the emanating arcs in place of the crossing. See (
1). The diagrams
comprise a so-called
oriented Conway triple.
we then have the following:
Theorem 1 (cf. [
1])
. Let denote the regular isotopy version of the Homflypt polynomial. Then there exists a unique regular isotopy invariant of classical oriented links , where and E are indeterminates, defined by the following rules:On crossings involving different components the following mixed skein relation holds:where ,
,
is an oriented Conway triple, For a union of r unlinked knots, , with , it holds that:
We recall that the invariant is determined by the following rules:
- (H1)
For
,
,
an oriented Conway triple, the following skein relation holds:
- (H2)
The indeterminate
a is the positive curl value for
H:
- (H3)
We also recall that the above defining rules imply the following:
- (H4)
For a diagram of the unknot,
U,
H is evaluated by taking:
where
denotes the writhe of
U—instead of 1 that is the case in the ambient isotopy category.
- (H5)
H being the Homflypt polynomial, it is multiplicative on a union of unlinked knots,
. Namely, for
we have:
Consequently, the evaluation of on the standard unknot is .
Assuming Theorem 1 one can compute on any given oriented link diagram by applying the following procedure: the skein rule (1) of Theorem 1 can be used to give an evaluation of in terms of and or of in terms of and . We switch mixed crossings so that the switched diagram is more unlinked than before. Applying this principle recursively we obtain a sum with polynomial coefficients and evaluations of on unions of unlinked knots. These are formed by the mergings of components caused by the smoothings in the skein relation (1). To evaluate on a given union of unlinked knots we then use the invariant H according to rule (2) of Theorem 1. Note that the appearance of the indeterminate E in rule (2) is the critical difference between and H. Finally, evaluations on individual knotted components are done with the use of H via formula (H5) above.
One could specialize the
z, the
a and the
E in Theorem 1 in any way one wishes. For example, if
then
H specializes to the Alexander–Conway polynomial [
2,
3]. If
then
H becomes the unnormalized Jones polynomial [
4]. In each case
can be regarded as a generalization of that polynomial.
The invariant
generalizes
H to a new 3-variable invariant for
links. Indeed,
coincides with the regular isotopy version of the new 3-variable link invariant
of [
13]. On the other hand, by normalizing
to obtain its ambient isotopy counterpart, we have by Theorem 1 an independent, skein-theoretic proof of the well-definedness of
.
2.2. Defining and
We now consider the class
of unoriented link diagrams. For any crossing of a diagram of a link in
, if we rotate the overcrossing arc counterclockwise it sweeps two regions out of the four. If we join these two regions, this is the
A-smoothing of the crossing, while joining the other two regions gives rise to the
B-smoothing. Using these conventions, the
A-smoothing of
in (
2) below is
and the
B-smoothing of
is
. Similarly, the
A-smoothing of
is
and the
B-smoothing of
is
. We shall say that a crossing is of
positive type if it produces a horizontal
A-smoothing and that it is of
negative type if it produces a vertical
A-smoothing. Let now
be an unoriented diagram with a positive type crossing specified and let
be the same diagram but with that crossing switched. Let also
and
indicate the same diagram but with the
A-smoothing and the
B-smoothing in place of the crossing. See (
2). The diagrams
comprise a so-called
unoriented Conway quadruple.
In analogy to Theorem 1 we also have the 3-variable generalizations of the regular isotopy versions of the Dubrovnik and the Kauffman polynomials [
11]:
Theorem 2 (cf. [
1])
. Let denote the regular isotopy version of the Dubrovnik polynomial. Then there exists a unique regular isotopy invariant of classical unoriented links , where and E are indeterminates, defined by the following rules:On crossings involving different components the following skein relation holds:where ,
,
,
is an unoriented Conway quadruple, For a union of r unlinked knots in ,
, with , it holds that:
We recall that the invariant is determined by the following rules:
- (D1)
For
,
,
,
an unoriented Conway quadruple, the following skein relation holds:
- (D2)
The indeterminate
a is the positive type curl value for
D:
- (D3)
We also recall that the above defining rules imply the following:
- (D4)
For a diagram of the unknot,
U,
D is evaluated by taking
- (D5)
D, being the Dubrovnik polynomial, it is multiplicative on a union of unlinked knots,
. Namely, for
we have:
Consequently, on the standard unknot we evaluate .
The Dubrovnik polynomial,
D, is related to the Kauffman polynomial,
K, via the following translation formula, observed by W.B.R Lickorish [
11]:
Here,
denotes the number of components of the link
,
, and
is the
writhe of
L for some choice of orientation of
L, which is defined as the algebraic sum of all crossings of
L. The translation formula is independent of the particular choice of orientation for
L. Our theory generalizes also the regular isotopy version of the Kauffman polynomial [
11] through the following:
Theorem 3 (cf. [
1])
. Let denote the regular isotopy version of the Kauffman polynomial. Then there exists a unique regular isotopy invariant of classical unoriented links , where and E are indeterminates, defined by the following rules:On crossings involving different components the following skein relation holds:where ,
,
,
is an unoriented Conway quadruple, For a union of r unlinked knots in ,
, with
, it holds that:
We recall that the invariant is determined by the following rules:
- (K1)
For
,
,
,
an unoriented Conway quadruple, the following skein relation holds:
- (K2)
The indeterminate
a is the positive type curl value for
K:
- (K3)
We also recall that the above defining rules imply the following:
- (K4)
For a diagram of the unknot,
U,
K is evaluated by taking
- (K5)
K, being the Kauffman polynomial, it is multiplicative on a union of unlinked knots,
. Namely, for
we have:
Consequently, on the standard unknot we evaluate .
In Theorems 2 and 3 the basic invariants
and
could be replaced by specializations of the Dubrovnik and the Kauffman polynomial respectively and, then, the invariants
and
can be regarded as generalizations of these specialized polynomials. For example, if
then
is the Brandt–Lickorish–Millett–Ho polynomial [
10] and if
and
then
K becomes the Kauffman bracket polynomial [
9]. In both cases the invariant
generalizes these polynomials. Furthermore, a formula analogous to (
3) relates the generalized invariants
and
, see (
17).
In order to prove Theorems 1–3 one needs to show that the computation of the corresponding generalized invariant can be done solely from the rules of the theorem and that it is independent from any choices involved during the unlinking of different components as well as from the regular isotopy moves. To do this, we specify a computing algorithm to be used; but first we set some terminology.
2.3. Terminology and Notations
A link diagram is called generic if it is ordered, that is, an order is given to its components, directed, that is, a direction is specified on each component, and based, that is, a basepoint is specified on each component, distinct from the double points of the crossings.
A diagram that is the union of r unlinked knots, , with , is said to be a descending stack if, when walking along the components of in their given order, starting from their basepoints and following the specified directions, every mixed crossing is first traversed along its over-arc. Clearly, the structure of a descending stack no longer depends on the choice of basepoints; it is entirely determined by the order of its components. Note also that a descending stack is regularly isotopic to the corresponding split link comprising the r knotted components, , where the order of components is no longer relevant. The descending stack of knots associated to a given link diagram L is denoted as .
2.4. Computing Algorithm for the Generalized Invariants
The generalized invariants are computed on two levels: on the first level one abstracts the corresponding skein relation and applies it only on mixed crossings of a given link diagram. On the second level one evaluates the generalized invariant on unions of unlinked knots, by applying a new rule that uses the corresponding ground invariant and introduces a new variable. More precisely, assuming Theorems 1–3 a generalized invariant can be easily computed on any link diagram L by applying the algorithm below. This algorithm is necessary for proving well-definedness of the invariants.
(Diagrammatic level) Make L generic by choosing an order for its components and a basepoint and a direction on each component. Start from the basepoint of the first component and go along it in the chosen direction. When arriving at a mixed crossing for the first time along an under-arc we switch it by the mixed skein relation, so that we pass by the mixed crossing along the over-arc. At the same time we smooth the mixed crossing, obtaining a new diagram in which the two components of the crossing merge into one. We repeat for all mixed crossings of the first component. Among all resulting diagrams there is only one with the same number of crossings and the same number of components as the initial diagram and in this one the first component gets unlinked from the rest and lies above all of them. The other resulting diagrams have one less crossing and have the first component fused together with some other component. We proceed similarly with the second component switching all its mixed crossings except for crossings involving the first component. In the end the second component gets unliked from all the rest and lies below the first one and above all others in the maximal crossing diagram, while we also obtain diagrams containing mergings of the second component with others (except component one). We continue in the same manner with all components in order and we also apply this procedure to all product diagrams coming from smoothings of mixed crossings. In the end we obtain the unlinked version of L plus a number of links ℓ with unlinked components resulting from the mergings of different components.
(Computational level) On the level of the generalized invariant, Rule (1) of Theorems 1–3 tells us how the switching of mixed crossings is controlled. After all applications of the mixed skein relation we obtain a linear sum of the values of the generalized invariant on all the resulting links ℓ with unlinked components. The evaluation of the generalized invariant on each ℓ reduces to the evaluation of the corresponding basic invariant by Rule (2) of Theorems 1–3.
2.5. Sketching the Proof of Theorems 1–3
For proving Theorems 1–3 one must prove that the resulting evaluation for a link diagram
L does not depend on the choices made for bringing
L to generic form, namely the sequence of mixed crossing changes, the ordering of components and the choice of basepoints, and also that it is invariant under regular isotopy moves. A good guide for this is the skein-theoretic proof of Lickorish–Millett of the well-definedness of the Homflypt polynomial [
6], with the necessary adaptations and modifications, taking for granted the well-definedness of the basic invariant. The difference here lies in modifying the original skein method. The original method bottoms out on unlinks, since self-crossings are not distinguished from mixed crossings. In the new method the evaluations bottom out on calculations of the basic invariant on unions of unlinked knots. This difference causes the need of particularly elaborate arguments in proving invariance of the resulting evaluation under the sequence of mixed crossing switches and the order of components in comparison with [
6].
Namely, we assume that the statement is valid for all link diagrams of up to crossings, independently of choices made during the evaluation process and of Reidemeister III moves and Reidemeister II moves that do not increase the number of crossings above . Our aim is to prove that the statement is valid for all generic link diagrams of up to n crossings, independently of choices, Reidemeister III moves and Reidemeister II moves not increasing above n crossings. We do this by double induction on the total number of crossings of a generic link diagram (which applied to all intermediate diagrams related to smoothings) and on the number of mixed crossing switches needed for bringing the diagram to the form of a descending stack of knots (for which we make the assumption that rule (2) of the corresponding theorem applies).
The interested reader may consult [
1] for a detailed exposition.
5. State Sum Models
In this section, we present
state sum models for the generalized regular isotopy invariant
of Theorem 1. A state sum model is a sum over evaluations of combinatorial configurations (the states) related to the given link diagram, such that this sum is equal to the invariant that we wish to compute. The definitions for the state sum will be given in
Section 5.2. The state sum we use depends on the
skein template algorithm (see [
39,
40]) that effectively produces the states to be evaluated. The skein template algorithm is detailed in
Section 5.1.
In fact, we will consider the lower level invariant to be
H or any specialization of
H and we will be denoting it generically by
. Thus we will write
to indicate that we have specialized the lower level invariant. This liberty is justified by the 4-variable framework of [
1] and it is useful in applications and computations. Everything we do in the remainder of the paper applies to the generalized Dubrovnik and Kauffman polynomials,
and
, in essentially the same way.
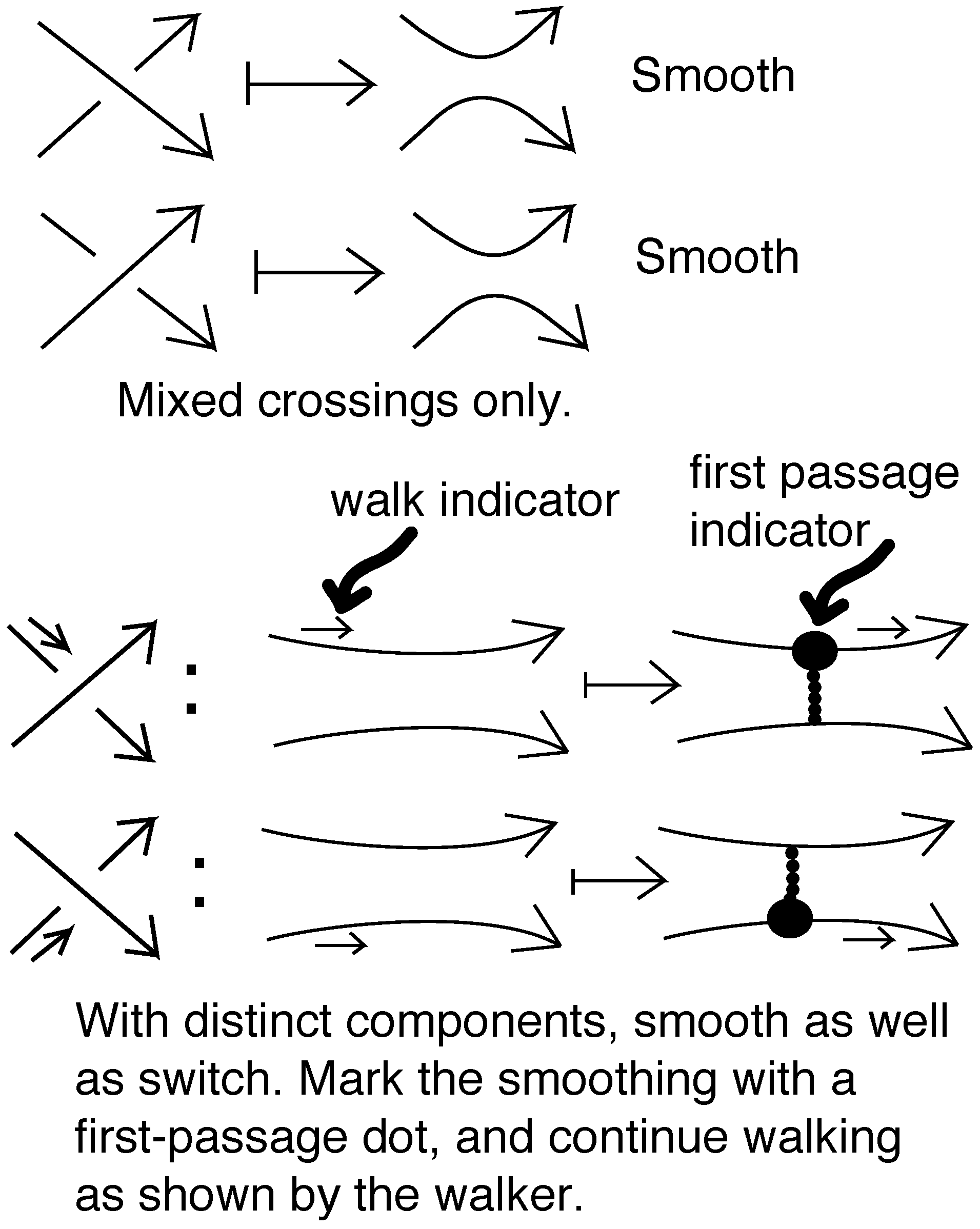
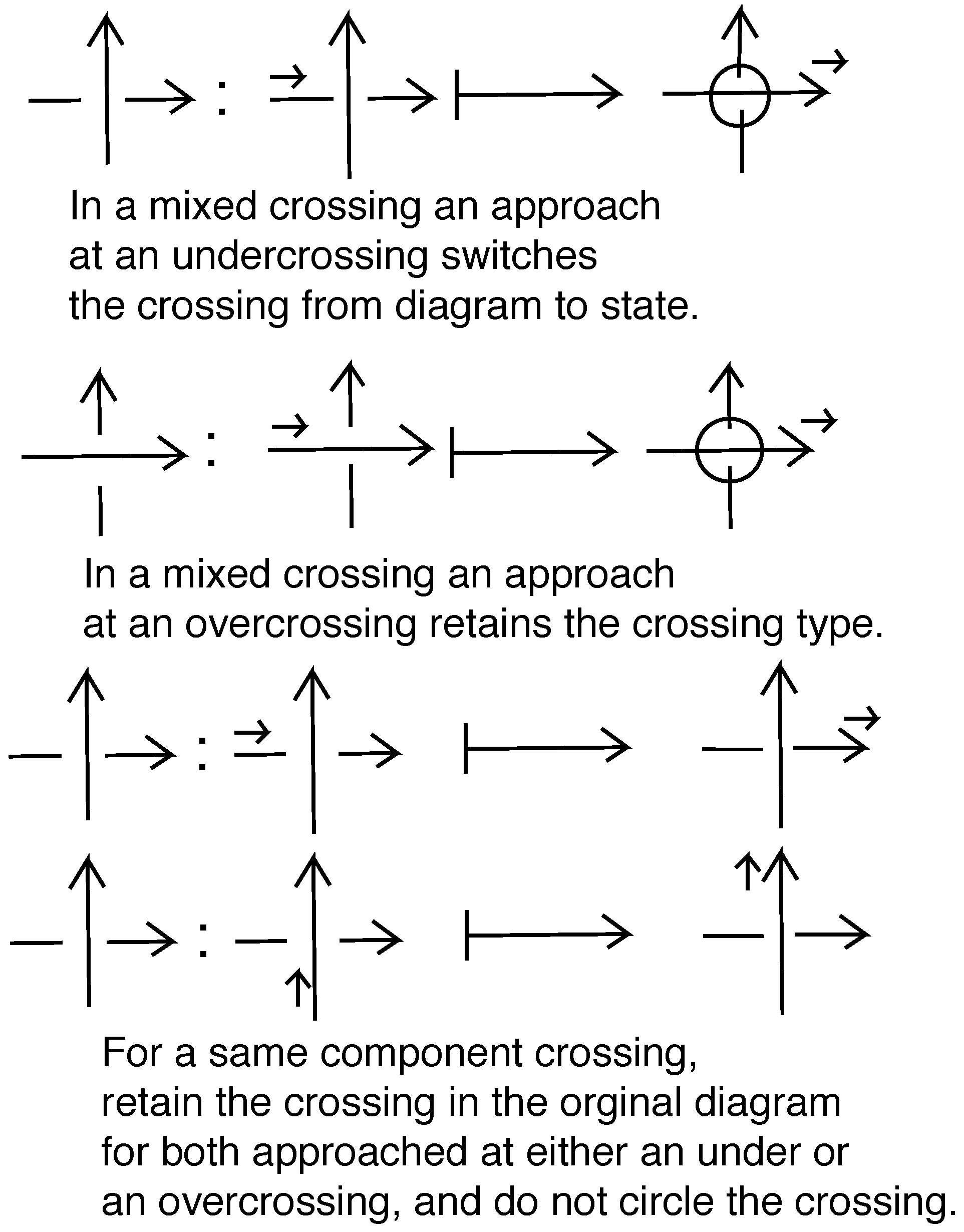
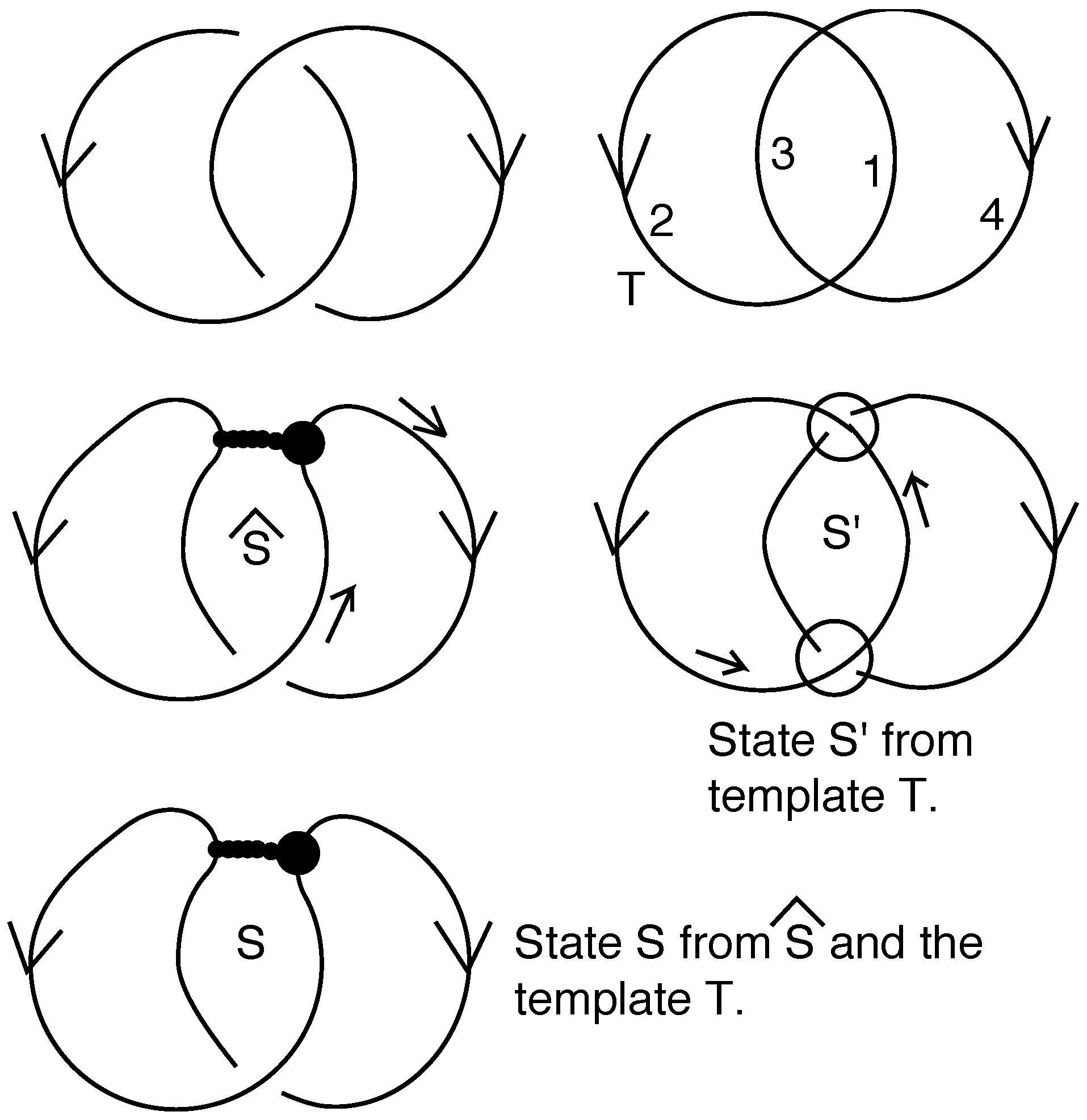
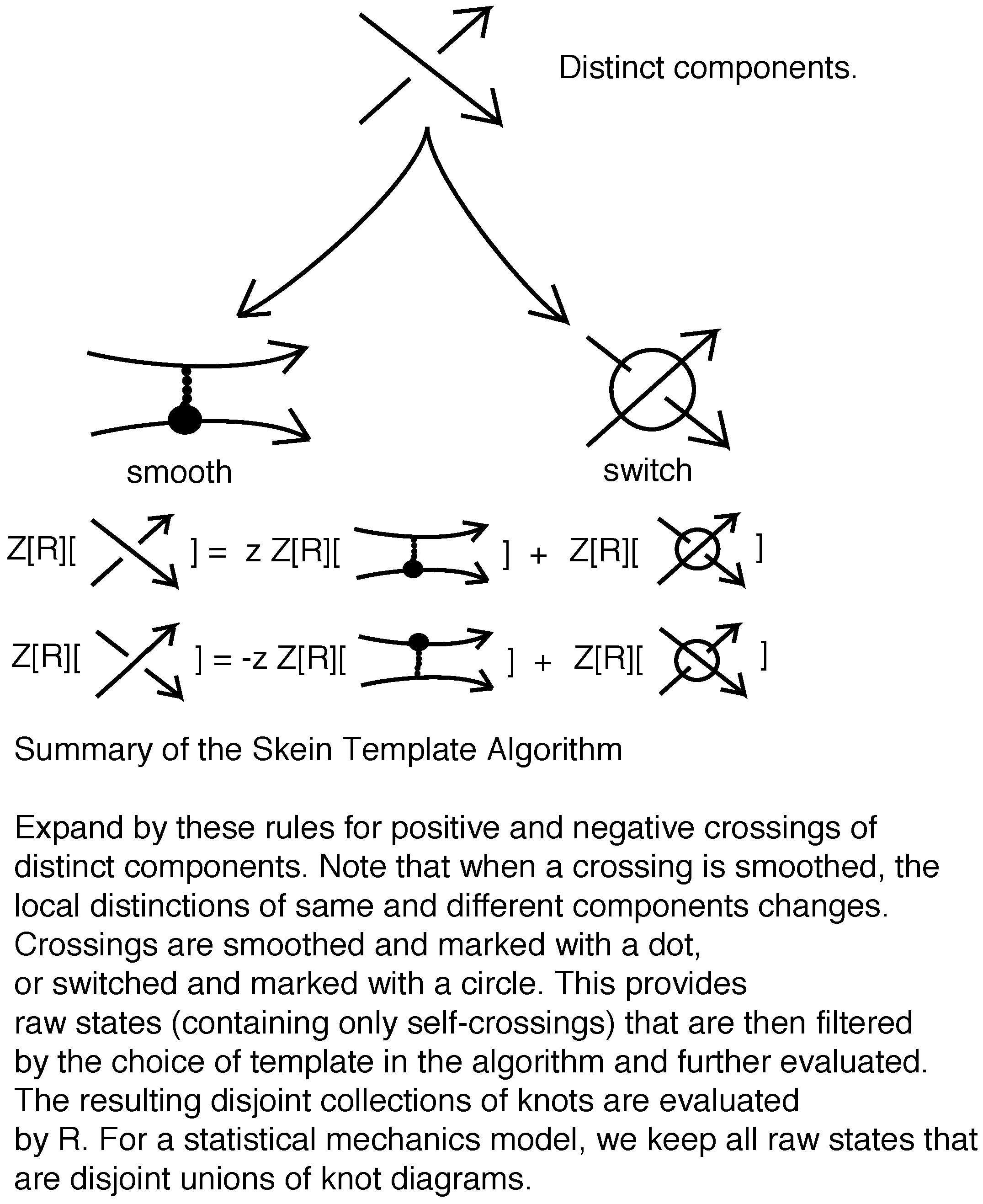
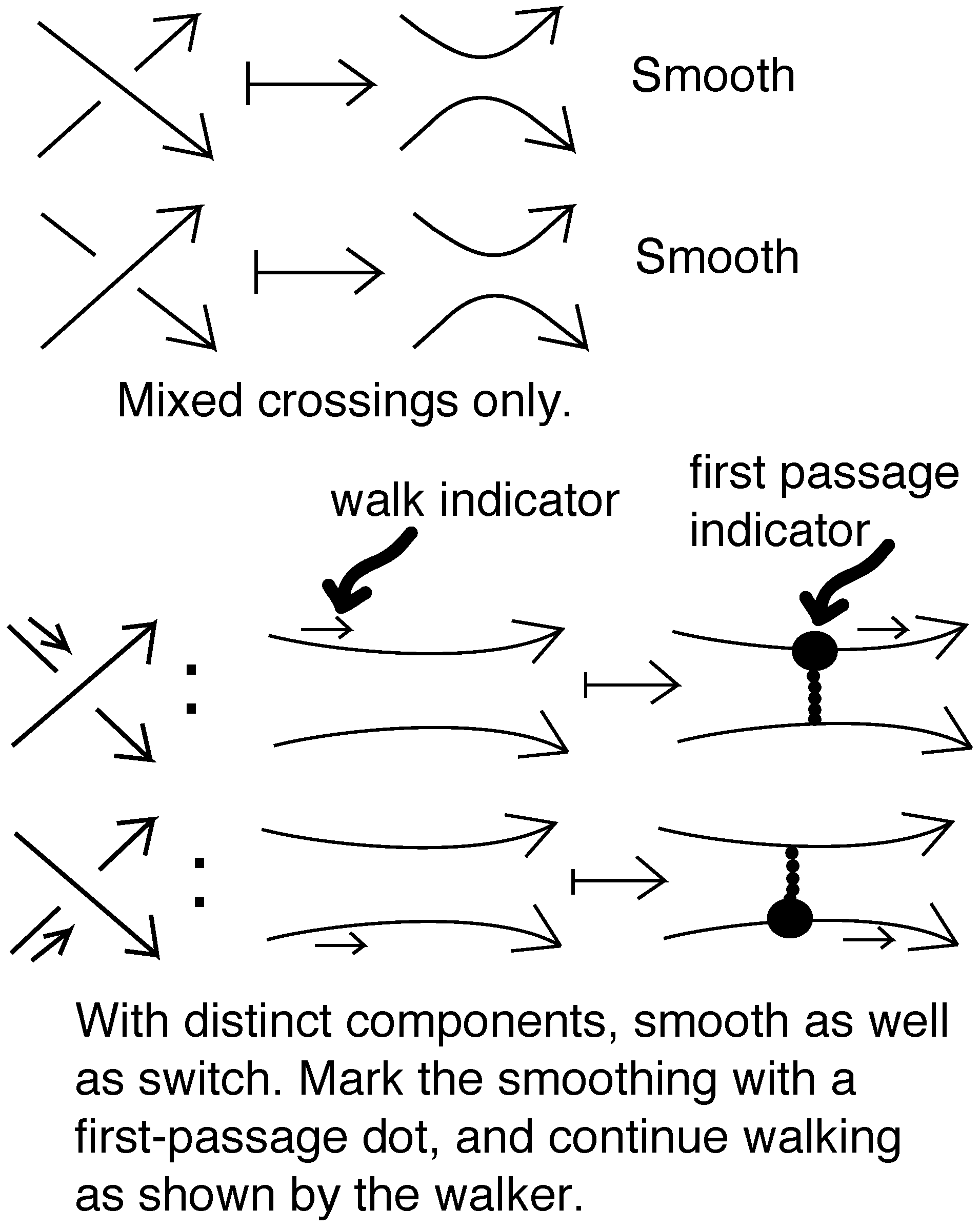
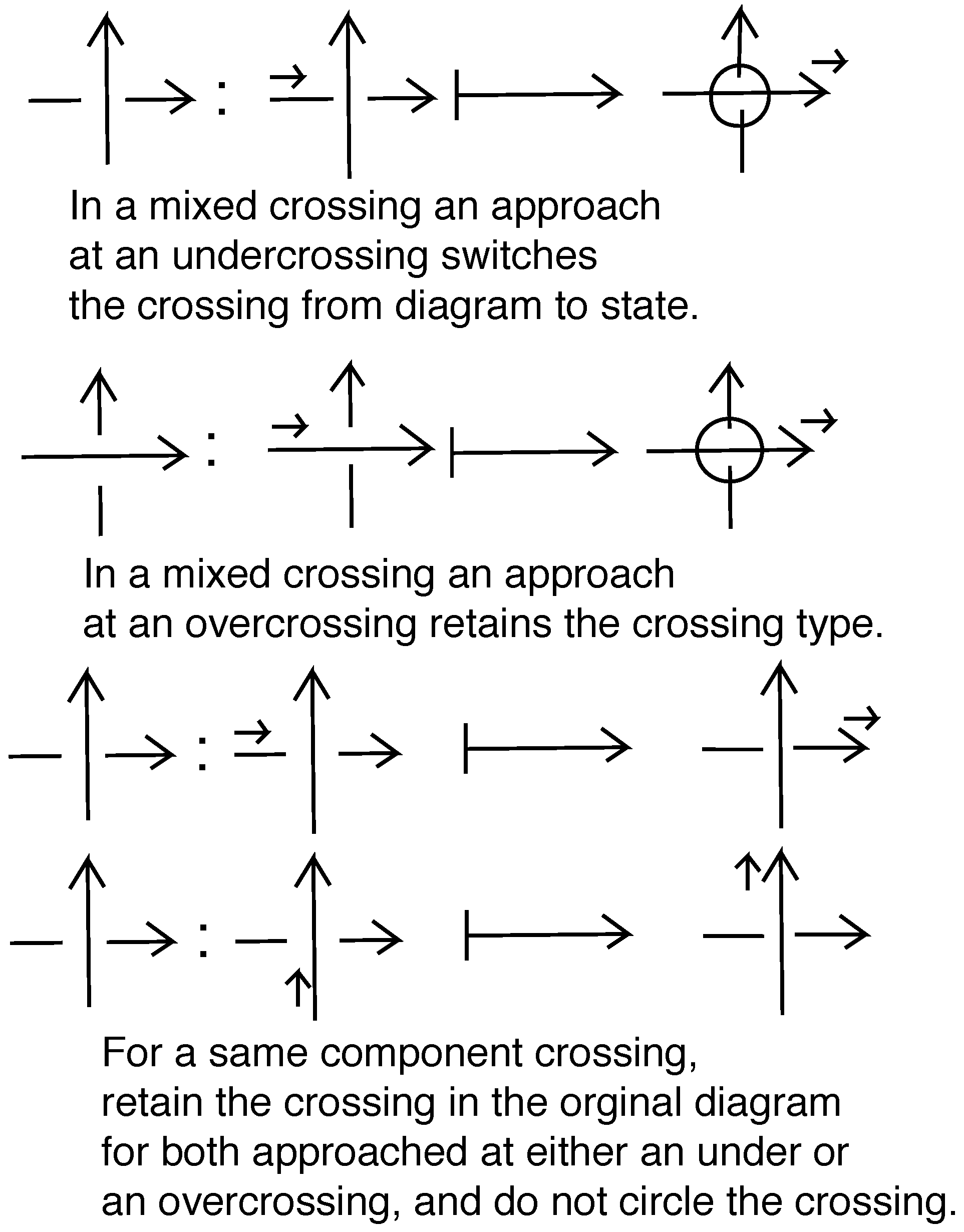
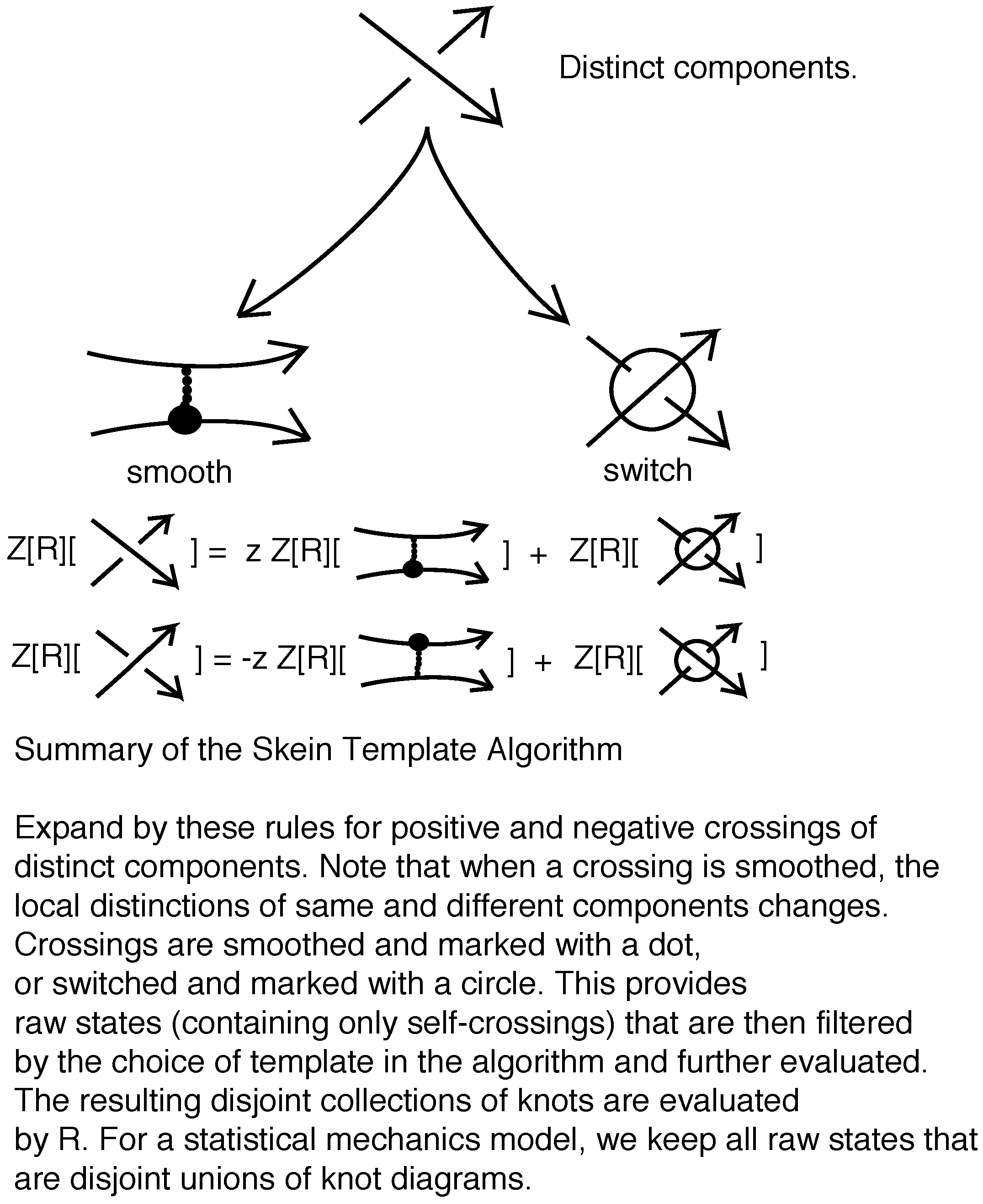
Definition 1. Let L denote a diagram of an oriented link. The oriented smoothing of a crossing is the replacement of the crossing by the smoothing that is consistent with the orientations of its two arcs. See Figure 3 top. Pre-states, , for L are obtained by successively smoothing or switching mixed crossings (a mixed crossing is a crossing between two components of the link). That is, one begins by choosing a mixed crossing and replacing it by smoothing it and switching it, see Figure 4 top. The smoothing is decorated as in Figure 3, so that there is a dot that discriminates whether the smoothing comes from a positive or a negative crossing. The process of placing the dot is related to walking along the diagram. That walk only allows a smoothing at a mixed crossing that is approached along an undercrossing arc as shown in Figure 3. After the smoothing is produced, that walk and the dotting are related as shown in Figure 3. The reasons for these conventions will be clarified below, where we explain a process that encodes the skein calculation of the invariants. The switched crossing is circled to indicate that it has been chosen by this skein process, see Figure 5. Then one chooses another mixed crossing in each of the resulting diagrams and applies the same procedure. New self-crossings can appear after a smoothing. A completed pre-state is obtained when a decorated diagram is reached where all the undecorated crossings are self-crossings. A state, S, for L is a completed pre-state that is obtained with respect to a template as we describe it below. In a state, we are guaranteed that the resulting link diagram is a topological union of unlinked knot diagrams (a stack). In fact, the skein template process will produce exactly a set of states whose evaluations correspond to the skein evaluation of the invariant .
In the skein template algorithm we produce a specific set of pre-states that we can call states, and show how to compute the link invariant
from these states by adding up evaluations of each state. The key to producing these pre-states is the
template. A template,
T, for a link diagram
L is an indexed, flattened diagram for
L (the underlying universe of
L, a 4-valent graph obtained from
L by ignoring the over and under crossing data in
L) so that the indices are on the edges of the graph. See
Figure 6 for an illustration of a template
T for the Hopf link. We assume that the indices are distinct elements of an ordered set (for example, the natural numbers). We use the template to decide the order of processing for the pre-state. As we know, the invariant
itself is independent of this ordering. Take the link diagram
L and a template
T for
L. Process the diagram
L to produce pre-states
generated by the template
T by starting at the smallest index and walking along the diagram, smoothing and marking as described below.
5.1. The Skein Template Algorithm
The skein template algorithm is basically very simple. It is a formalization of the skein calculation process, designed to fix all the choices in this process by the choice of the template T. Then the resulting states are exactly the ends of a skein tree for evaluating . Each state, as a link diagram, is a stack of knots, ready to be evaluated by R. The product of the vertex weights for the state multiplied by R evaluated on the state is equal to the contribution of that state to the polynomial.
We now detail the skein template algorithm. Consider a link diagram
L (view
Figure 6 and
Figure 7). Label each edge of the projected flat diagram of
L from an ordered index set
I so that each edge receives a distinct label. We have called this labeled graph the
template. We have defined a
pre-state of
L by selecting mixed crossings in
L and operating on them according to a walk on the template, starting with the smallest index in the labeling of
T. We now go through the skein template algorithm, referring at the same time to specific examples.
Begin walking along the link
L, starting at the least available index from
. See
Figure 6 and
Figure 7.
When meeting a mixed crossing via an under-crossing arc, produce two new diagrams (see
Figure 4 top), one by switching the crossing and circling it (
Figure 5) and one by smoothing the crossing and labeling it (
Figure 3).
When traveling through a smoothing, label it by a
dot and a
connector indicating the
place of first passage as shown in
Figure 3 and exemplified in
Figure 6 and
Figure 7. At a smoothing, assign to the smoothing a vertex weight of
or
(the weights are indicated in
Figure 8).
We clarify these steps with two examples, the Hopf link and the Whitehead link. See
Figure 6 and
Figure 7. In these figures, for Step 1 we start at the edge with index 1 and meet a mixed crossing at its under-arc, switching it for one diagram and smoothing it for another. We walk past the smoothing, placing a dot and a connector.
When meeting a mixed over-crossing, circle the crossing (
Figure 5 middle) to indicate that it has been processed and continue the walk.
When meeting a self-crossing, leave it unmarked (
Figure 5 bottom) and continue the walk.
When a closed path has been traversed in the template, choose the next lowest unused template index and start a new walk. Follow the previous instructions for this walk, only labeling smoothings or circling crossings that have not already been so marked.
When all paths have been traversed, and the pre-state has no remaining un-processed mixed crossing, the pre-state is now a state S for L. When we have a state S, it is not hard to see that it consists in an unlinked collection of components in the form of stacks of knots as we have previously described in this paper.
When a pre-state is finished, there will be no undecorated mixed crossings in the state. All uncircled crossings will be self-crossings and there will also be some marked smoothings. All the smoothings will have non-zero vertex weights ( z, or 1) and the pre-state becomes a contributing state for the invariant.
This state is evaluated by taking the product of the vertex weights and the evaluation of the invariant R on the the link underlying the state after all the decorations have been removed. The skein template process produces a link from the state that is a stack of knots. We give the details in the next section.
The (unnormalized) invariant is the sum over all the evaluations of these states obtained by applying the skein-template algorithm. We will denote this sum by for a given link L and justify in the discussion below that it is indeed equal to the previously defined .
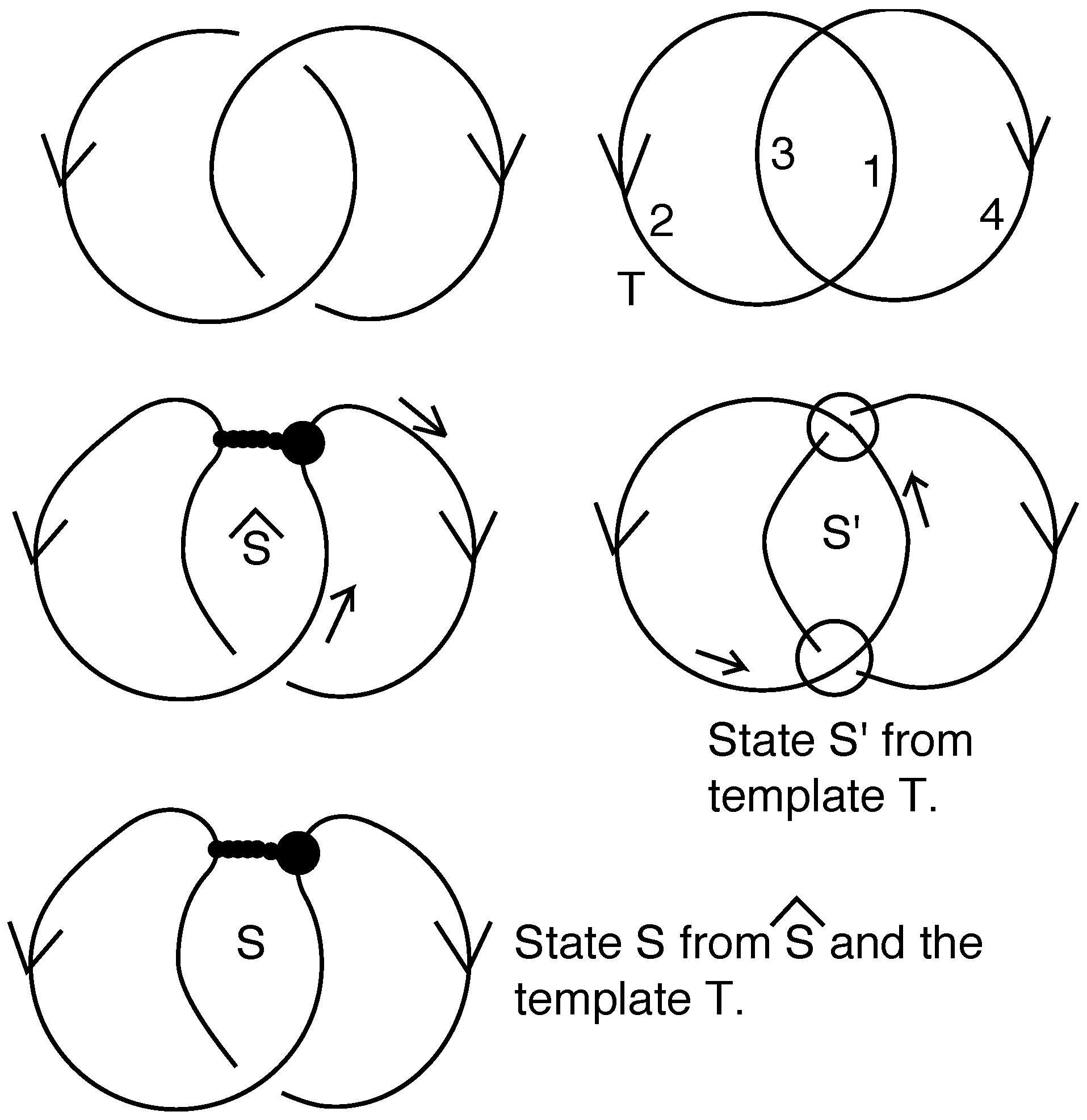
Returning to our example, we have the diagram shown in
Figure 6. In this diagram
S is a completed state for the initial link
L. Note that in forming
S we start at 1 in the template and first encounter a mixed under-crossing. This is smoothed to produce the pre-state
, and the walk continues to encounter a self-crossing that is left alone. The result is the state
S. Moreover, first encounter from 1 meets an under-crossing and we switch and circle this crossing and continue that walk. The next crossing is an over-crossing that is mixed. We circle this crossing and produce the state
. The two states
S and
are a complete set of states produced by the skein template algorithm for the Hopf link
L with this template
T.
5.2. The State Summation
We are now in a position to define the state sum.
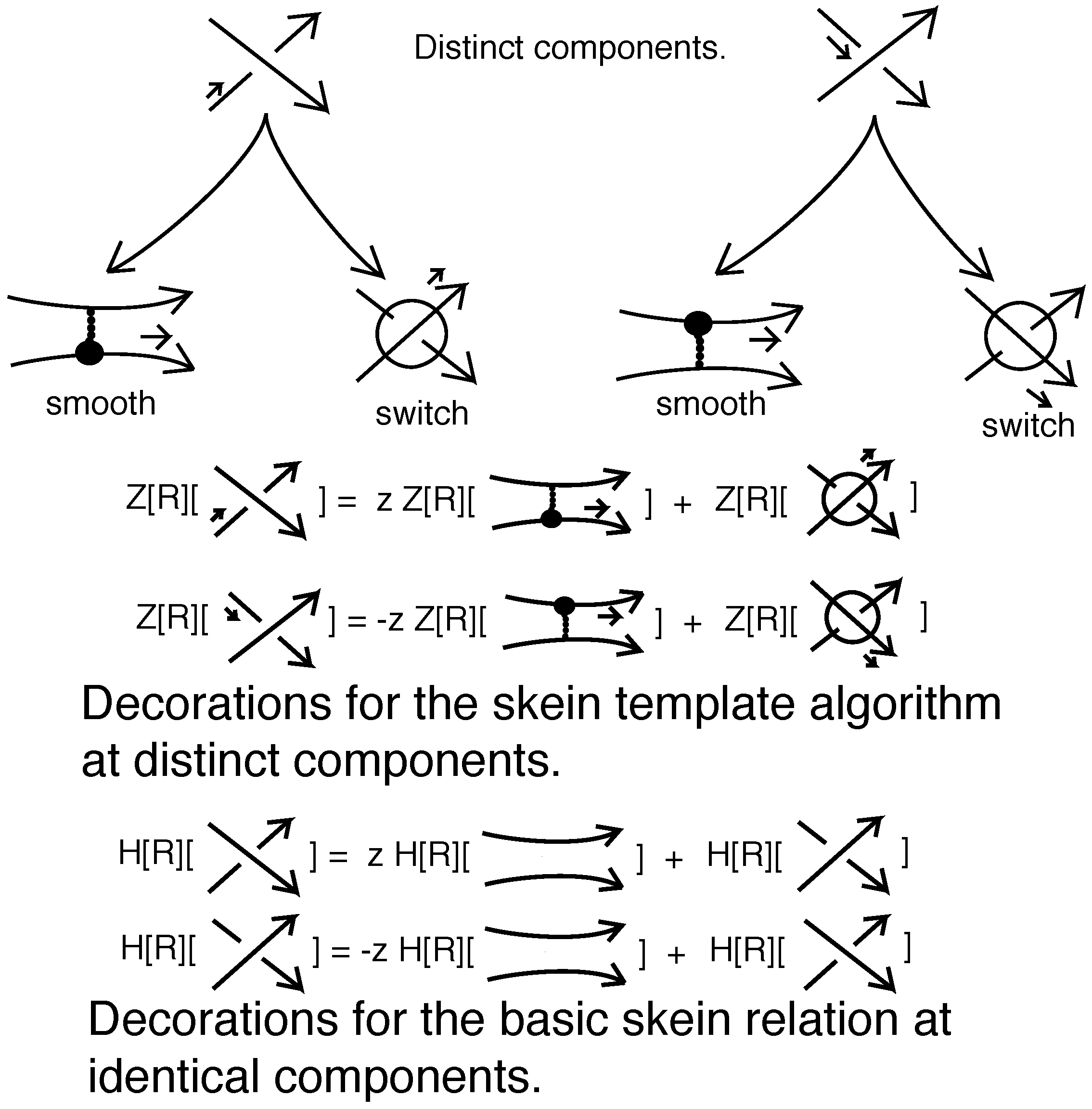
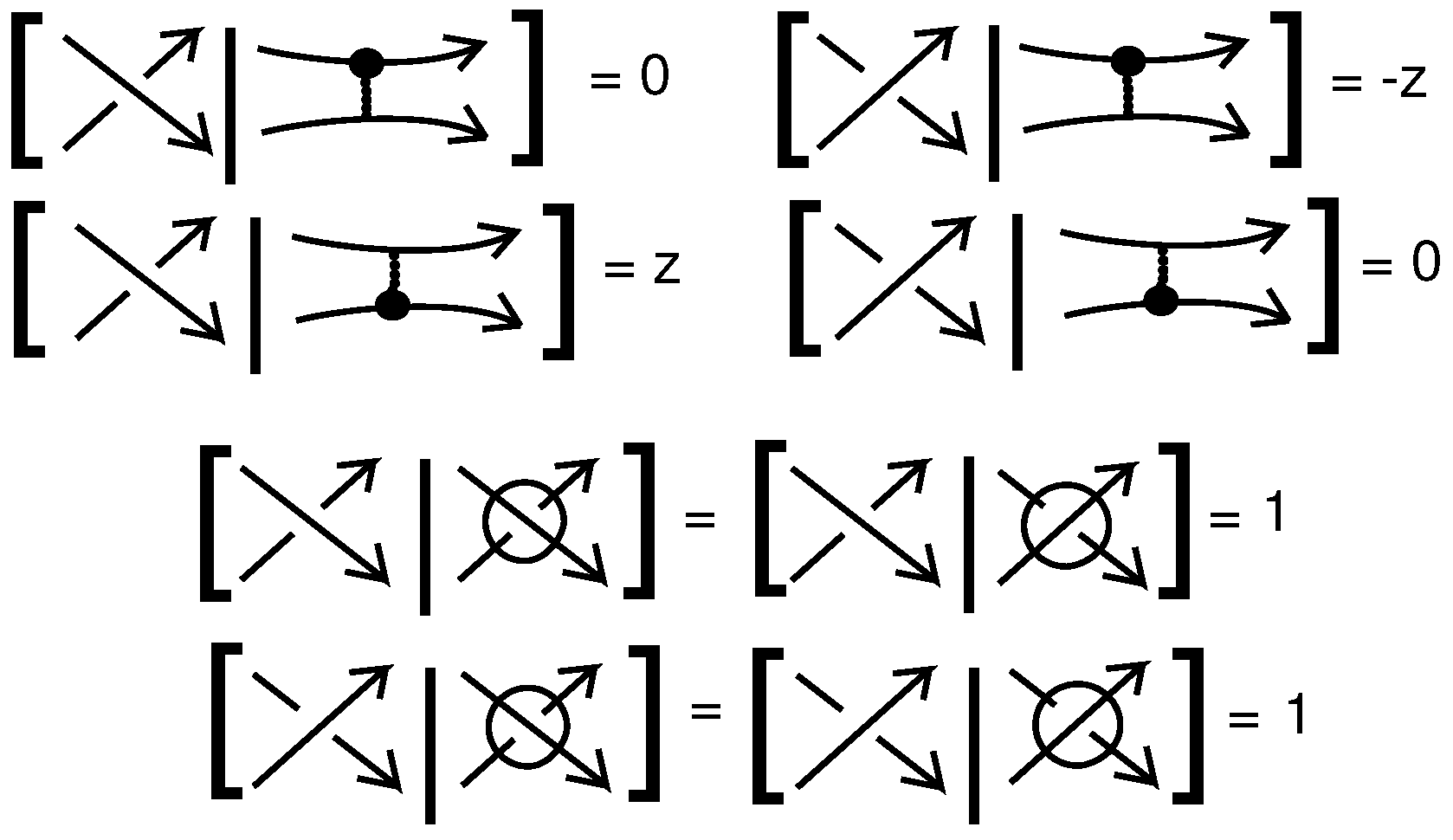
Definition 2. Let denote the collection of states defined by the skein template algorithm for a link diagram L with template T. Given a state S, we shall define an evaluation of S relative to L and the invariant R, denoted by . The state sum is then defined by We will show that , the regular isotopy invariant that we have defined in earlier sections of the paper. For the specialization R, we let denote the corresponding invariant of ambient isotopy. Thusgives the normalized invariant of ambient isotopy in state sum form. The sites of the state S consist in the decorated smoothings and the decorated crossings indicated in Figure 4. Each state evaluation consists of two parts. We shall write it in the form The first part depends only on L and the state S. The second part uses the chosen knot invariant R. We define as a product over the sites of S:where is defined by the equations in Figure 8, comparing a crossing in L with the corresponding site σ. This means that if a smoothed site has a dot along its lower edge (when oriented from left to right), then its vertex weight is and if it has a dot along its upper edge, then it has a vertex weight . Circled crossings have vertex weights 1. In Figure 8 we have indicated the possibility of vertex weights 0, but these will never occur in the states produced by the skein template algorithm. If we were to sum over a larger set of states, then some of them would be eliminated by this rule. The reader should note that the choice of or is directly in accord with the rules for the skein relation from a positive crossing or a negative crossing, respectively. We define as a weighted product of the R-evaluations of the components of the state S:where E is defined previously and Here is the set of component knots of the state S. Recall that each state S is a stacked union of single unlinked component knots , , with k depending on the state. In computing we ignore the state decorations and remove the circles from the crossings. With this, we have completed the definition of the state sum.
Note that, by (
18) and (
20) we assert that
Remark 6. If the invariant R is itself generated by a state summation, then we obtain a hybrid state sum for consisting in the concatenations (in order) of these two structures. We expand on this idea in Section 6. 5.3. Connection of the State Sum with Skein Calculation
We will show that the sum over states corresponds exactly with the results of making a skein calculation that is guided by the template in the skein template algorithm. Thus the template that we have already described works in these two related contexts. In this way we will show that the state summation gives a formula for the invariant .
We begin with an illustration for a single abstract crossing as shown in
Figure 5. We shall refer to the skein calculation guided by the template as the
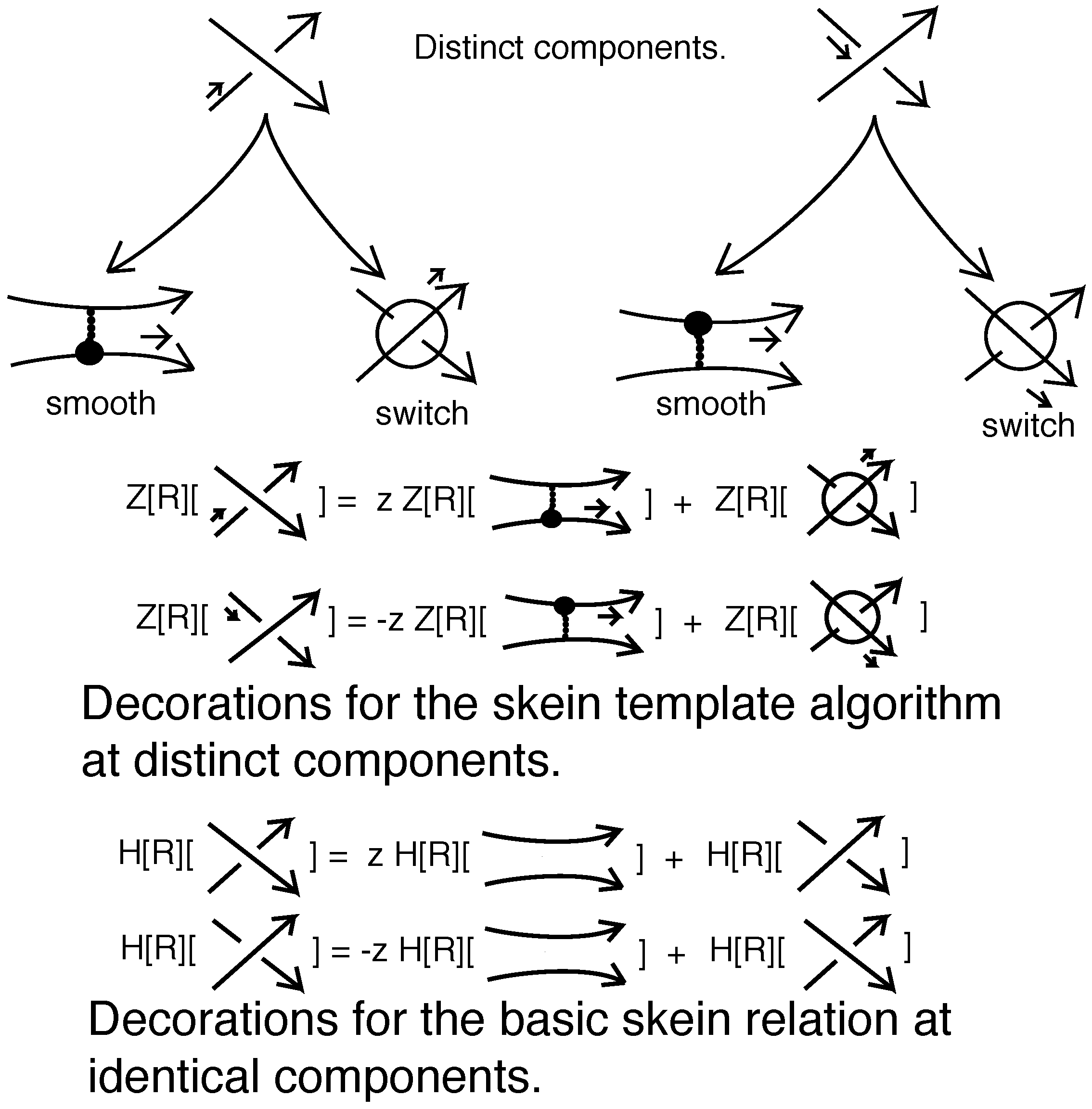
skein algorithm. In this figure the walker in the skein algorithm (using the template) approaches along the under-crossing line. If the crossing that is met is a self-crossing of the given diagram, then the walker just continues and the crossing is circled. If the crossing that is a mixed crossing of the given diagram, then two new diagrams are produced. In the first case we produce a smoothing with the labelling that indicates a passage along the edge met from the undercrossing arc. In the second case the walker switches the crossing and continues in the same direction as shown in the figure. This creates a bifurcation in the skein tree. Each resulting branch of the skein tree is treated recursively in this way, but first the walker continues on these given branches until it meets an undercrossing of two different components. Using the Homflypt regular isotopy skein relation (recall Theorem 1, rule (1)) we can write an expansion symbolically as shown in
Figure 4. Here it is understood that in expanding a crossing,
its two arcs lie on separate components of the given diagram;
the walker for the skein process always switches a mixed crossing that the walker approaches as an under-crossing, and never switches a crossing that it approaches as an over-crossing;
in expanding the crossing, the walker is shifted along according to the illustrations in
Figure 4.
Thus, for different components, we have the expansion equation shown in
Figure 4. Here, the template takes on the role of letting us make a skein tree of exactly those states that contribute to the state sum for
. Indeed, examine
Figure 8. The zero-weights correspond to inadmissible states while the
z and
weights correspond to admissible states where the walker approached at an under-crossing; the one-weights correspond to any circled crossing. Thus, we can use the skein algorithm to produce exactly those states that have a non-zero contribution to the state sum.
By using the skein template algorithm and the skein formulas for expansion, we produce a skein tree where the states at the ends of the tree (the original link is the root of the tree) are exactly the states
S that give non-zero weights for
. Thus, by (
18) we obtain:
Since we have shown that the state sum is identical with the skein algorithm for computing , for any link L, this shows that , as promised. Thus, we have proved:
Theorem 8. The state sum we have defined as is identical with the skein evaluation of the invariant . We conclude that , and thus that the skein template algorithm provides a state summation model for the invariant .
Proof. The state sum
where
denotes all the states produced by the skein template algorithm, for a choice of template
T.
is equal to the sum of evaluations of those states that are produced by the skein algorithm. That is we have the identity
The latter part of this formula follows because the skein template algorithm is a description of a particular skein calculation process for , that is faithful to the rules and weights for . We have also proved that is invariant and independent of the skein process that produces it. Thus we conclude that , and thus that the skein template algorithm provides a state summation model for the invariant . ☐
Remark 7. Note that it follows from the proof of Theorem 8 that the calculation of is independent of the choice of the template for the skein template algorithm.
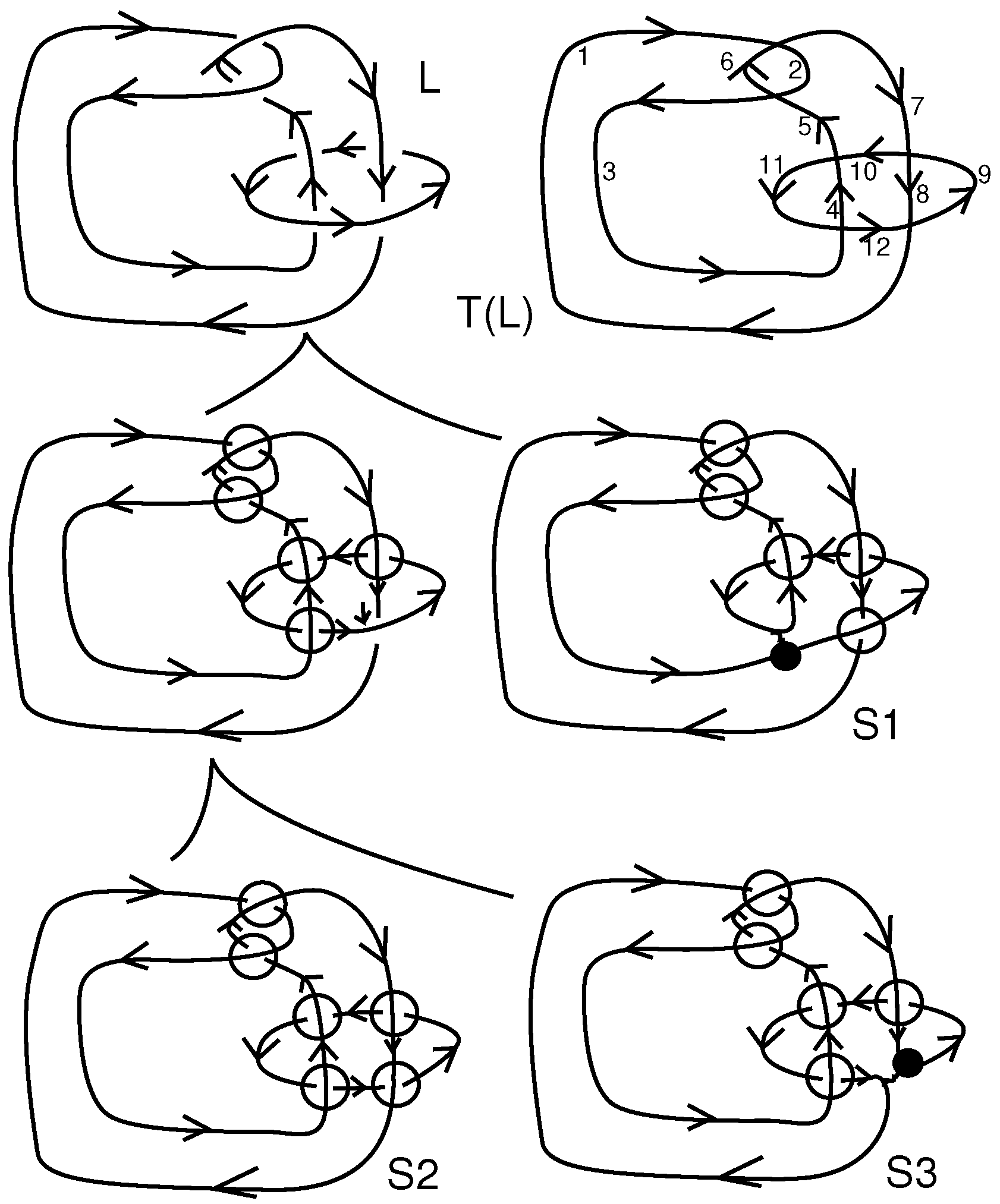
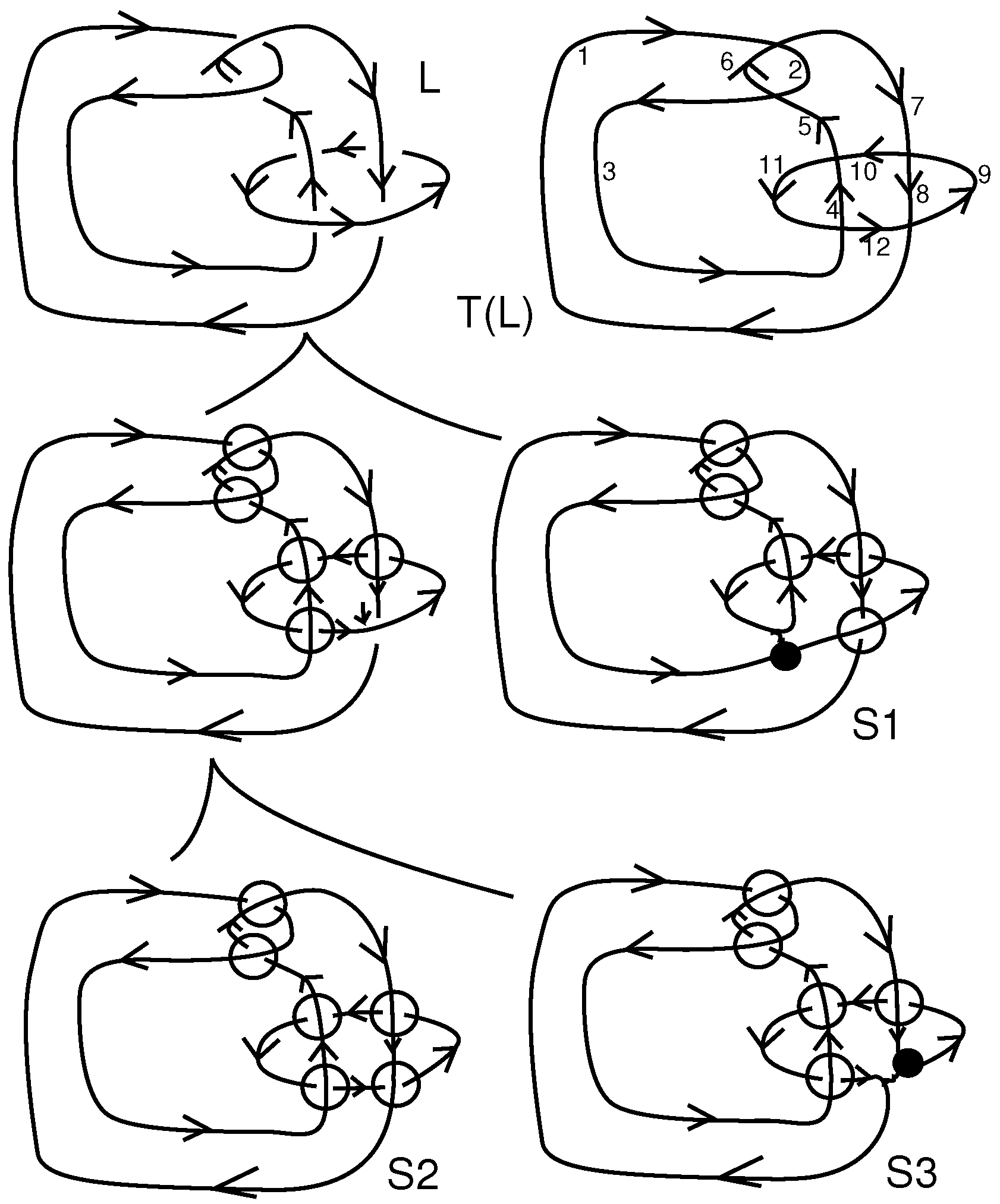
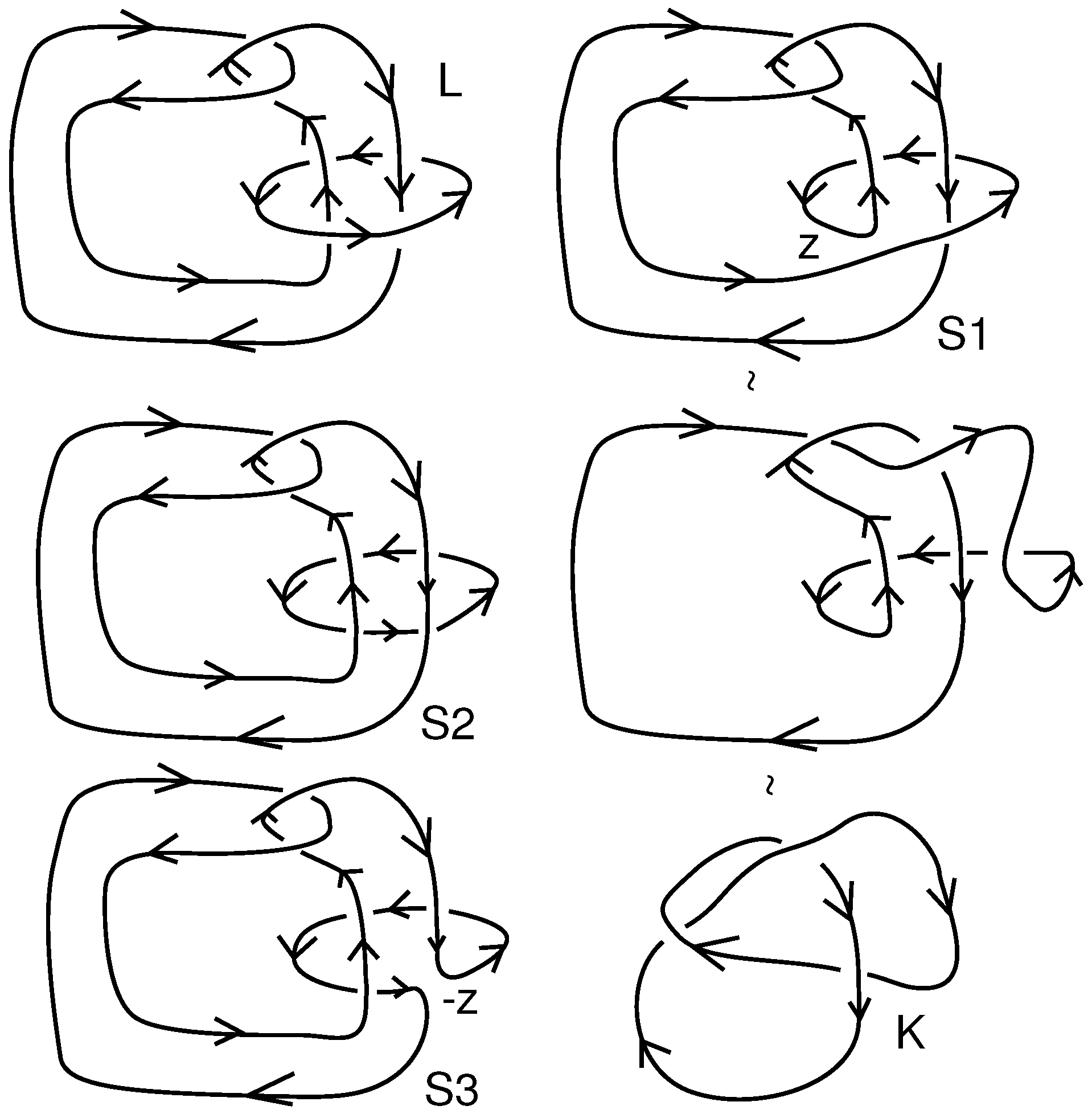
Example 2. In the example shown in Figure 7 we apply the skein template algorithm to the Whitehead link L. The skein-tree shows that for the given template T there are three contributing states .
is a knot K. is a stacked unlink or two unknotted components. is an unknot. Thus, referring to Figure 9 and using (19) we find the calculation shown below.where is defined in rule (5) after Theorem 1 and .
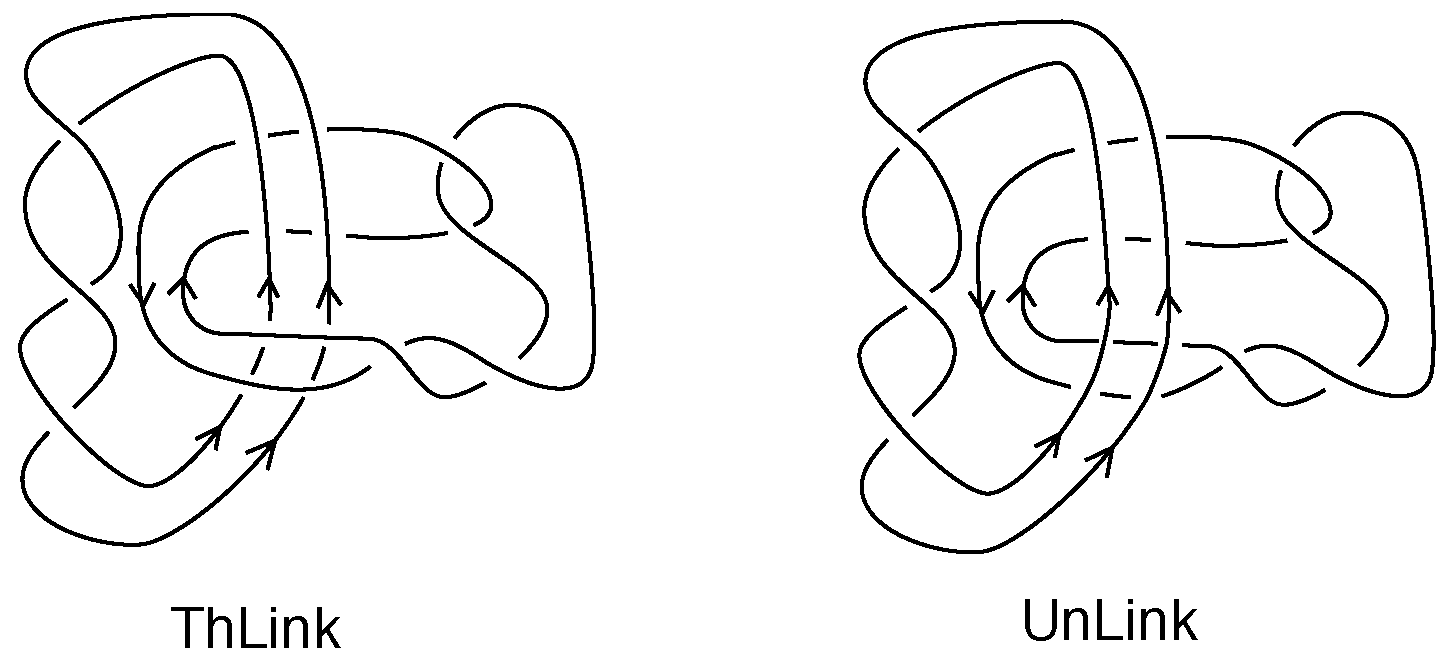
Remark 8. In the example above we see that any choice of specialization for the invariant R that can distinguish the trivial knot from the trefoil knot K will suffice for our invariant to distinguish the Whitehead link from the trivial link, for which .
6. Double State Summations
In this section, we consider state summations for our invariant where the invariant R has a state summation expansion. The invariant R has a variable w and a framing variable a. By choosing these variables in particular ways, we can adjust R to be the usual regular isotopy Homflypt polynomial or specializations of the Homflypt polynomial such as a version of the Kauffman bracket polynomial, or the Alexander polynomial, or other invariants. We shall refer to these choices as specializations of R. A given specialization of R may have its own form of state summation. This can be combined with the skein template algorithm that produces states to be evaluated by R. The result is a double state summation.
As in the previous section we have the global state summation (
23):
where
denotes the evaluation of the invariant
R on the union of unlinked knots that is the underlying topological structure of the state
S. It is possible that the specialization we are using has itself a state summation that is of interest. In this case we would have a secondary state summation formula of the type
Then, we would have a double state summation for the entire invariant in the schematic form:
where
denotes the secondary states for
R of the union of unlinked knots that underlies the state
S.
Example 3. Since we use the skein template algorithm to produce the first collection of states , this double state summation has a precedence ordering with these states produced first, then each S is viewed as a stack of knots and the second state summation is applied. In this section, we will discuss some examples for state summations for R and then give examples of using the double state summation.
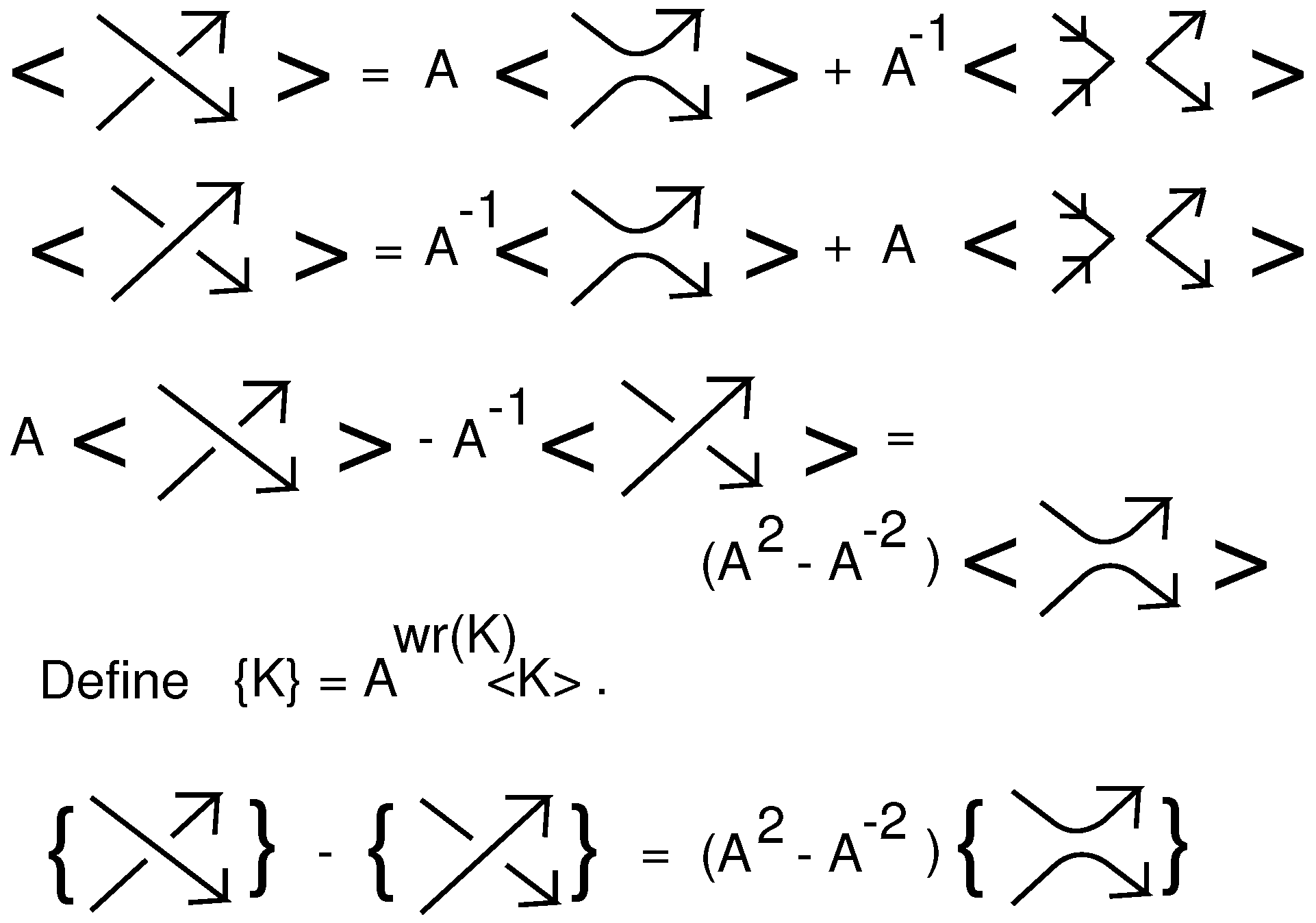
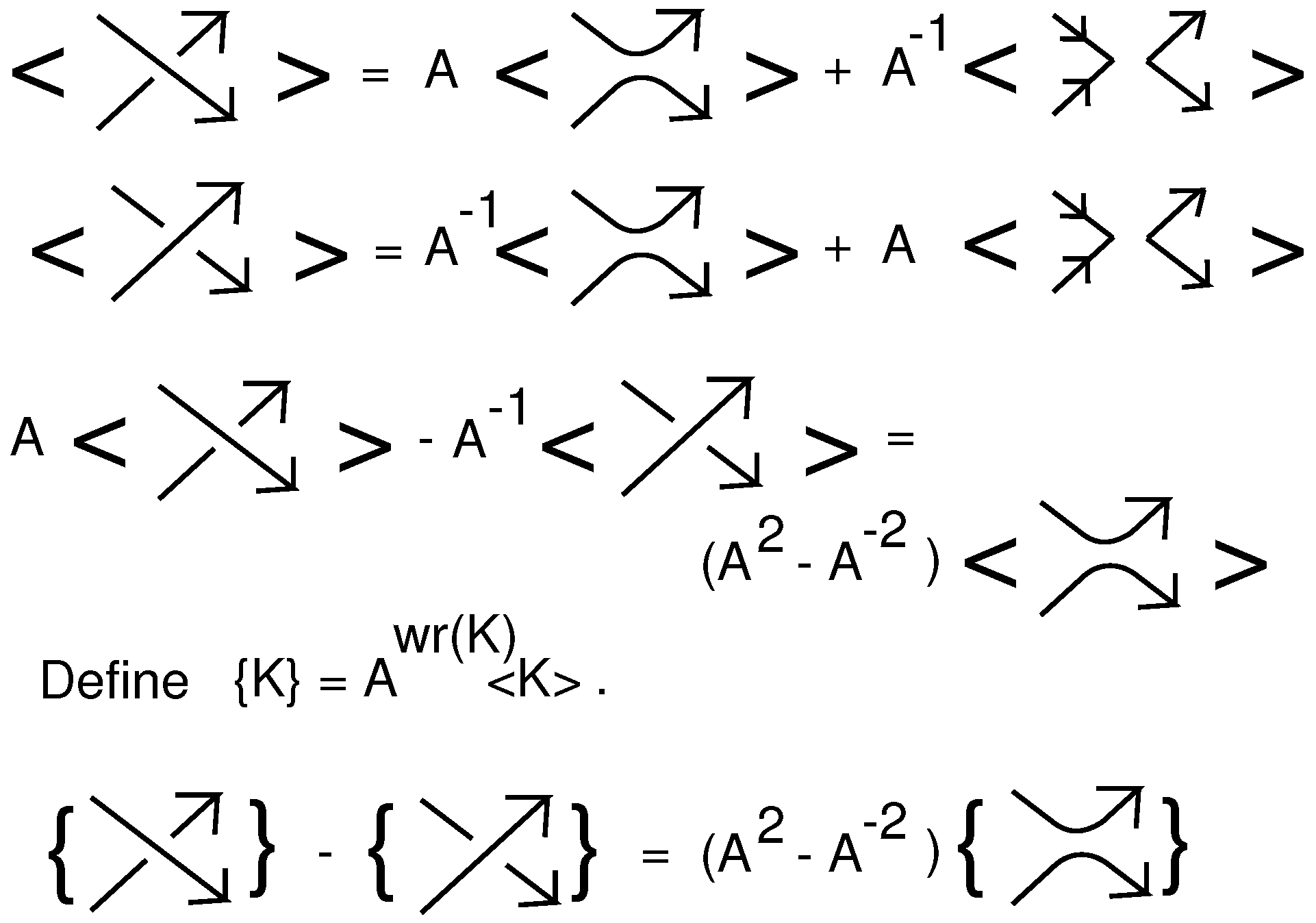
We begin with a state summation for the bracket polynomial that is adapted to our situation. View Figure 10. At the top of the figure we show the standard oriented expansion of the bracket. If the reader is familiar with the usual unoriented expansion [39], then this oriented expansion can be read by forgetting the orientations. The oriented states in this state summation contain smoothings of the type illustrated in the far right hand terms of the two formulas at the top of the figure. We call these disoriented smoothings since two arrowheads point to each other at these sites. Then by multiplying the two equations by A and by respectively, we obtain a difference formula of the typewhere denotes the local appearance of a positive crossing, denotes the local appearance of a negative crossing and denotes the local appearance of standard oriented smoothing. The difference equation eliminates the disoriented terms. It then follows easily from this difference equation that if we define a curly bracket by the equationwhere is the diagram writhe (the sum of the signs of the crossings of K), then we have a Homflypt type relation for as follows: This means that we can regard as a specialization of the Homflypt polynomial and so we can use it as the invariant R in our double state summation. The state summation for is essentially the same as that for the bracket, as we now detail.
From Figure 10 it is not difficult to see thatand Here denotes the disoriented smoothing shown in the figure. These formulas then define the state summation for the curly bracket. The reader should note that the difference of these two expansion Equations (28) and (29) is the difference formula (27) for the curly bracket in Homflypt form. The corresponding state summation [40] for these equations iswhere σ runs over all choices of oriented and disoriented smoothings of the crossings of the diagram K. Here denotes the number of oriented smoothings of positive crossings and denotes the number of oriented smoothings of negative crossings in the state σ. Further, denotes the number of loops in the state σ. With this state sum model in place we can proceed to write a double state sum for the bracket polynomial specialization of our invariant. The formalism of this invariant is after (26), as follows. Here we see the texture of the double state summation. The skein template algorithm produces from the oriented link L the stacks of knots K. Each such stack has a collection of smoothing states, and for each such smoothing state we have the term in the curly bracket expansion formula multiplying a corresponding term from the skein template expansion.
There are many other examples of specific double state summations for other choices of the specialization of the Homflypt polynomial.
Example 4. For example, we can use the specialized Homflypt state summation based on a solution to the Yang-Baxter equation as explained in [39,40,43]. Example 5. We could also take the specialization to be the Alexander–Conway polynomial and use the Formal Knot Theory state summation as explained in [44]. All these different cases deserve more exploration, particularly for computing examples of these new invariants.
Remark 9. The skein template algorithm as well as the double state summation generalizes to the Dubrovnik and Kauffman polynomials, and so applies to our generalizations of them, and , as well. We will take up this computational and combinatorial subject in a sequel to the present paper.
Remark 10. Consider the combinatorial formula (7). This formula can be regarded itself as a state summation, where the states are the partitions π and the state evaluations are given by the formula and the evaluations of the regular isotopy Homflypt polynomial R on . If we choose a state summation for R or a specialization of R, then this formula becomes a double state summation in the same sense as we discussed above, but without using the skein template algorithm. These double state sums deserve further investigation both for and also for the counterparts (15) and (16) for the generalizations and of the Kauffman and the Dubrovnik polynomials. 7. Statistical Mechanics and Double State Summations
In statistical mechanics, one considers the
partition function for a physical system [
45]. The partition function
is a summation over the states
of the system
G:
where
T is the temperature and
k is Bolztmann’s constant. Combinatorial models for simplified systems have been studied intensively since Onsager [
46] showed that the partition function for the Ising model for the limits of planar lattices exhibits a phase transition. Onsager’s work showed that very simple physical models, such as the Ising model, can exhibit phase transitions, and this led to the deep research subject of exactly solvable statistical mechanics models [
45]. The
q-state Potts model [
45,
47] is an important generalization of the Ising model that is based on
q local spins at each site in a graph
G. For the Potts model, a state of the graph
G is an assignment of spins from
to each of the nodes of the graph
G. If
is such a state and
i denotes the
i-th node of the graph
G, then we let
denote the spin assignment to this node. Then the energy of the state
is given by the formula
where
denotes an edge in the graph between nodes
i and
j, and
is equal to 1 when
and equal to 0 otherwise.
Temperley and Lieb [
48] proved that the partition function for the Potts model can be calculated using a contraction—deletion algorithm, and so showed that
is a special version of the dichromatic or Tutte polynomial in graph theory. This, in turn, is directly related to the bracket polynomial state sum, and so by generalizing the variables in the bracket state sum and translating the planar graph
G into a knot diagram by a
medial construction (associating a planar graph to a link diagram via a checkerboard coloring of the diagram so that each shaded region in the checkerboard corresponds to a graphical node and each crossing between shaded regions corresponds to an edge) , one obtains an expression for the Potts model as a bracket summation with new parameters [
47]. We wish to discuss the possible statistical mechanical interpretation of our generalized bracket state summation
(see Equation (
30)). In order to do this we shall extend the variables of our state sum so that the bracket calculation (for the stacks of knots
S that correspond to skein template states) is sufficiently general to support (generalized) Potts models associated with these knots. Accordingly, we add variables to the bracket expansion so that
and the loop value is taken to be
D rather than
.
For a given knot in the stack
S, the state sum remains well-defined and it now can be specialized to compute a generalized Potts model for a plane graph via a medial graph translation. Letting
denote this bracket state sum, we can then form a generalized version of
by using the expansion in
Figure 11 where
we use the raw states of this figure, and we do not filter them by the skein template algorithm, but simply ask that each final state is a union of unlinked knots. The result will then be a combinatorially well-defined double-tier state sum. It is this state sum
that can be examined in the light of ideas and techniques in statistical mechanics. The first tier expansion is highly non-local, and just pays attention to dividing up the diagrams so that the first tier of states are each collections of unlinked knots. Then each knot can be regarded as a localized physical system and evaluated with the analogue of a Potts model. This is the logical structure of our double state summation, and it is an open question whether it has a significant physical interpretation.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}