
Two-Dimensional Hermite Filters Simplify the Description of High-Order Statistics of Natural Images


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
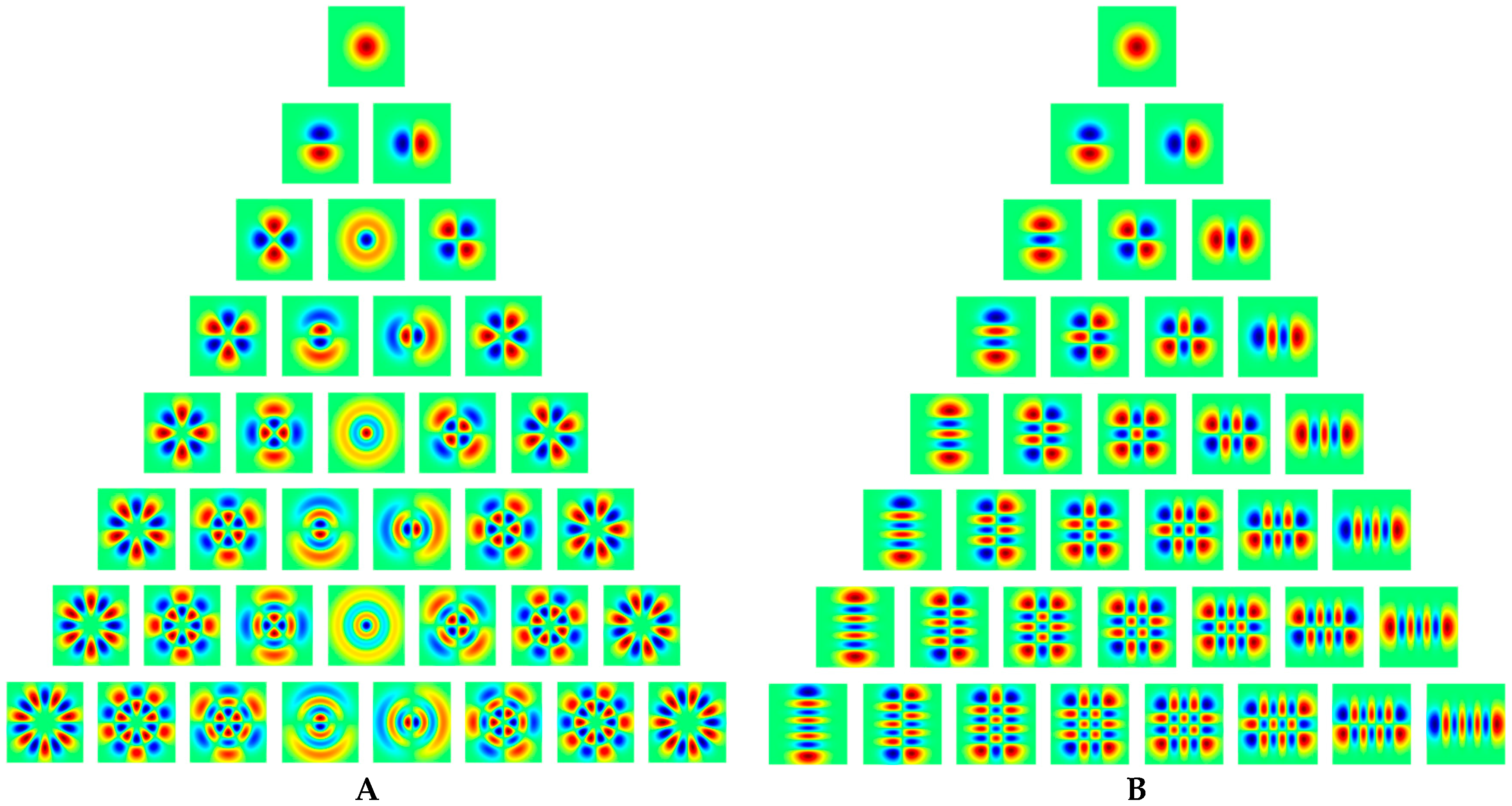
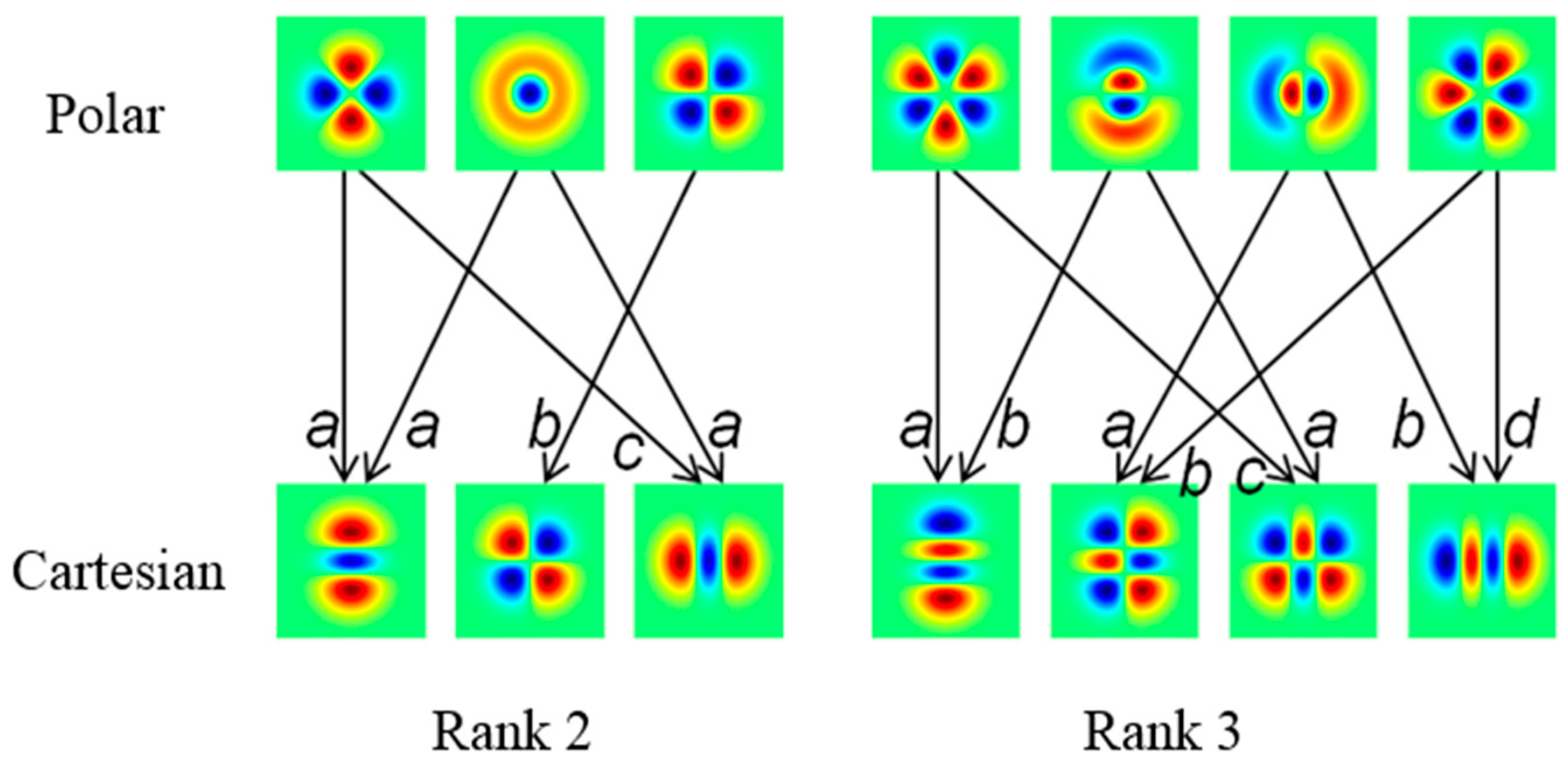
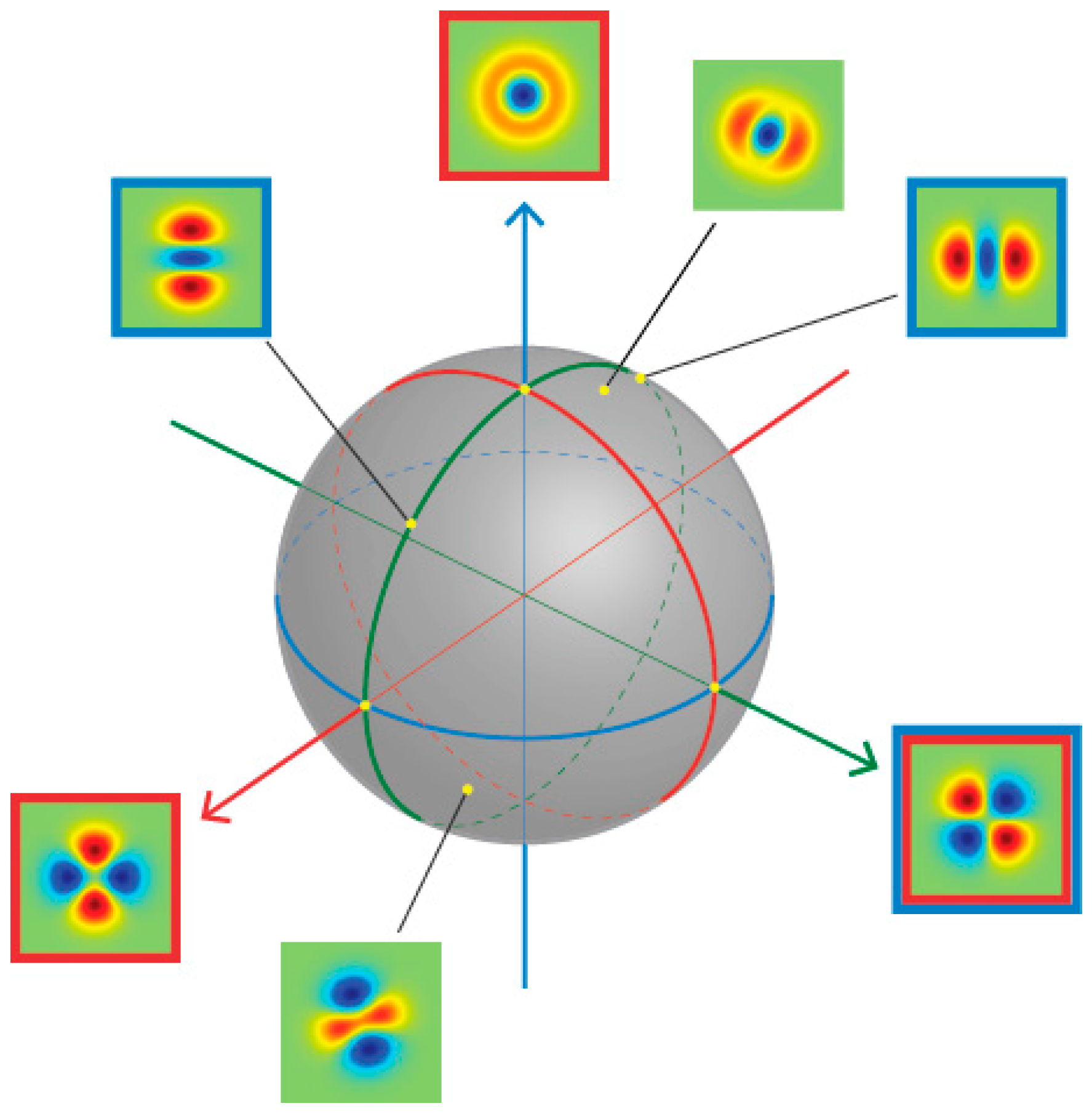
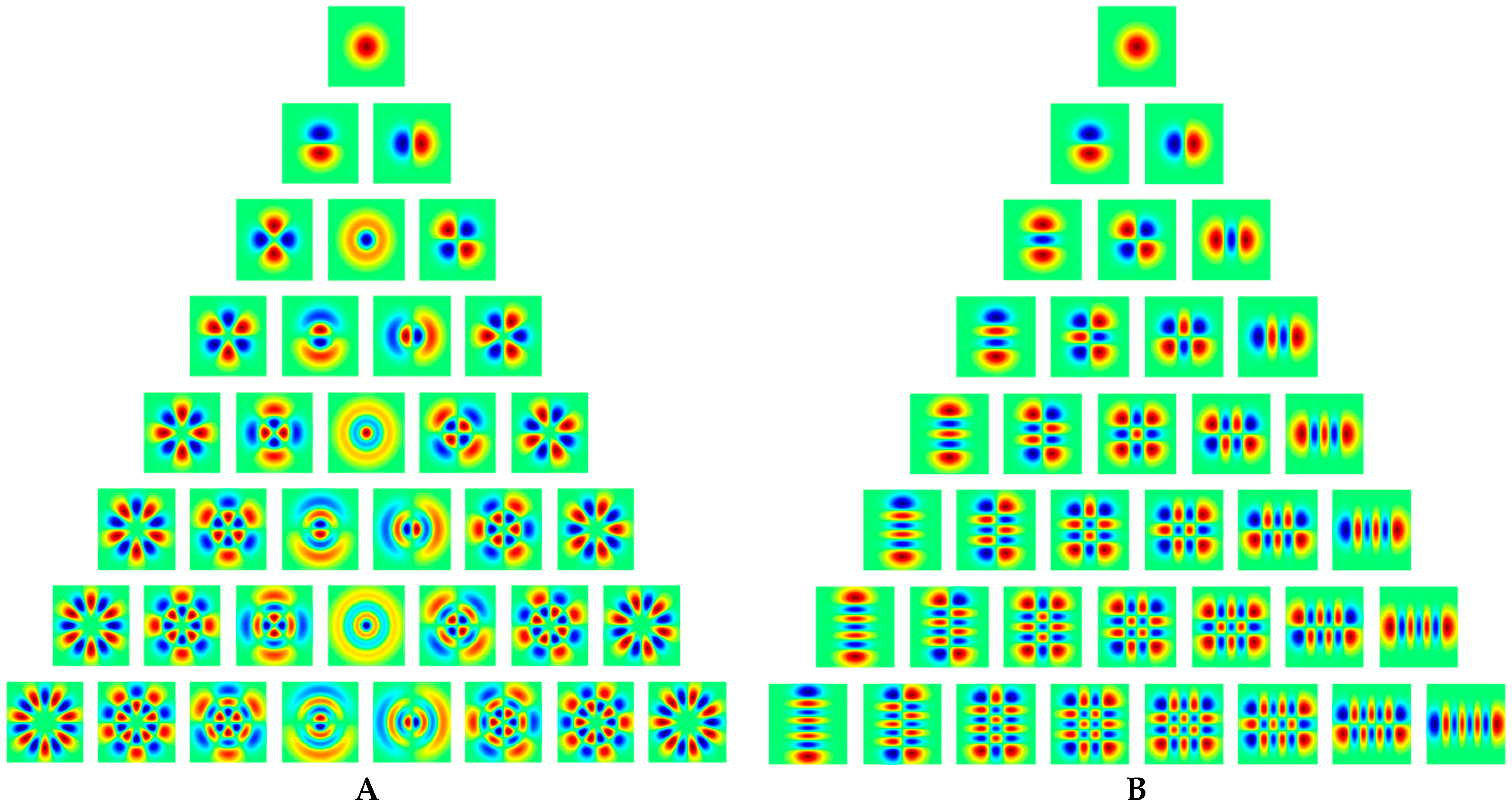
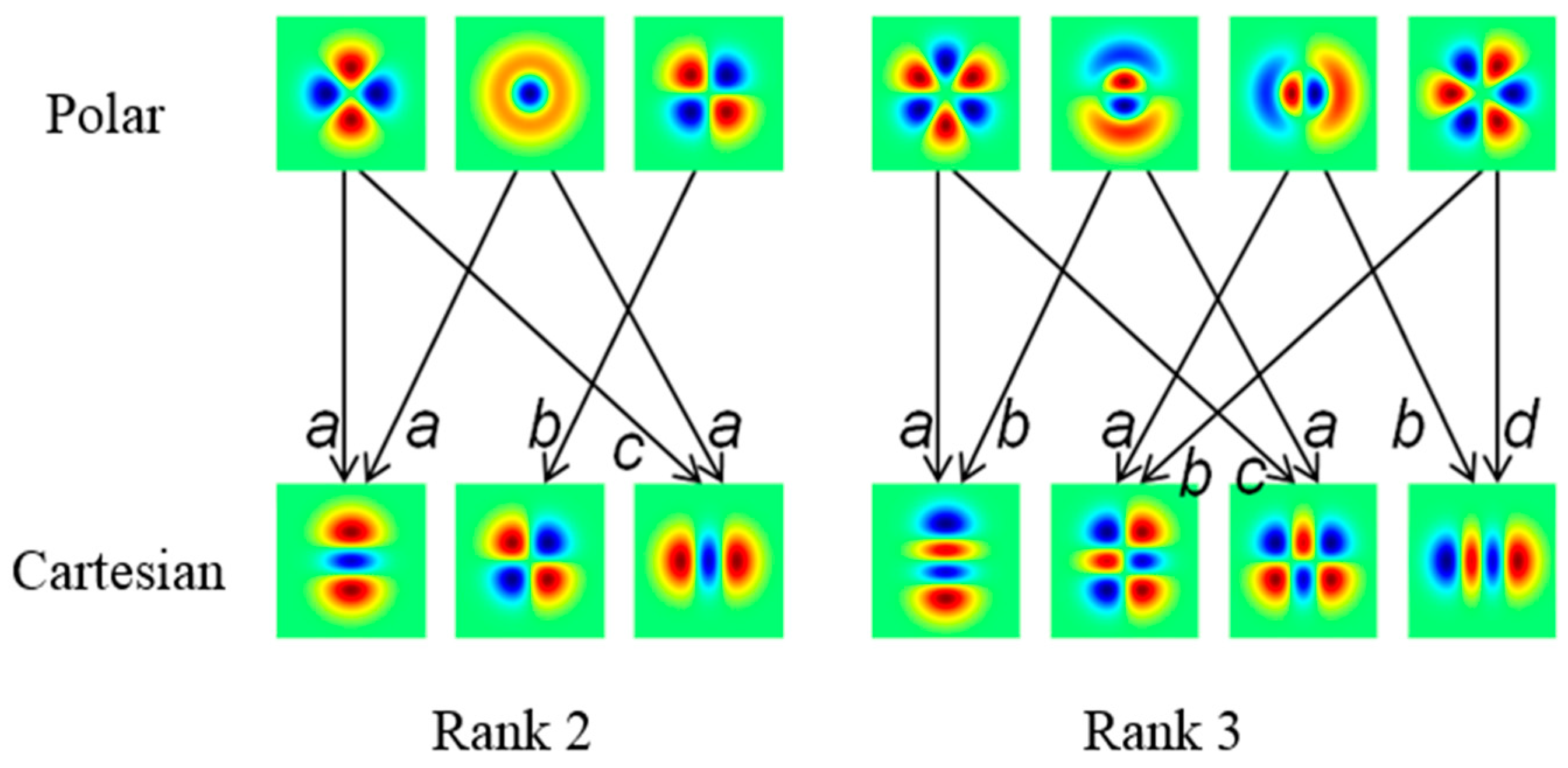
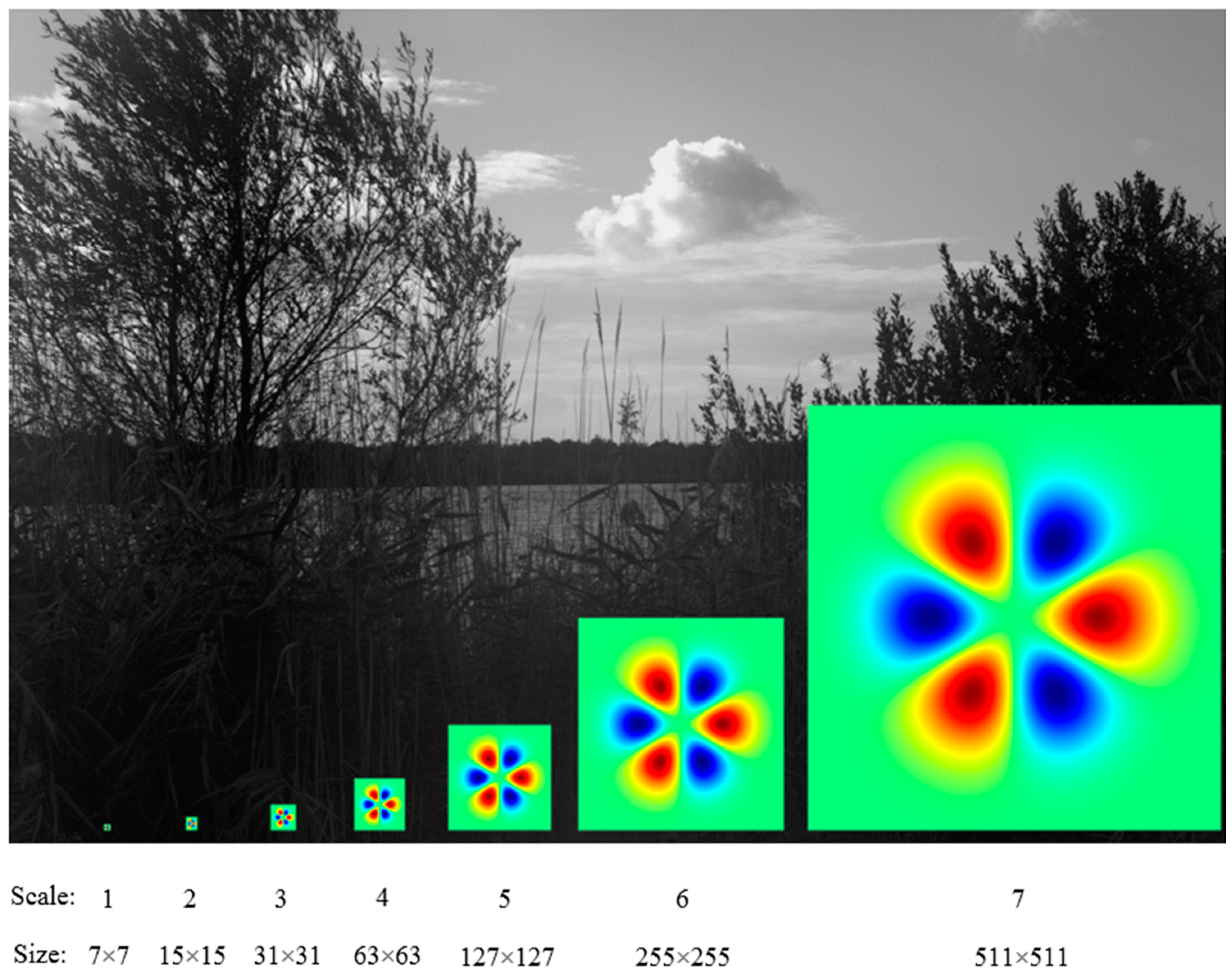
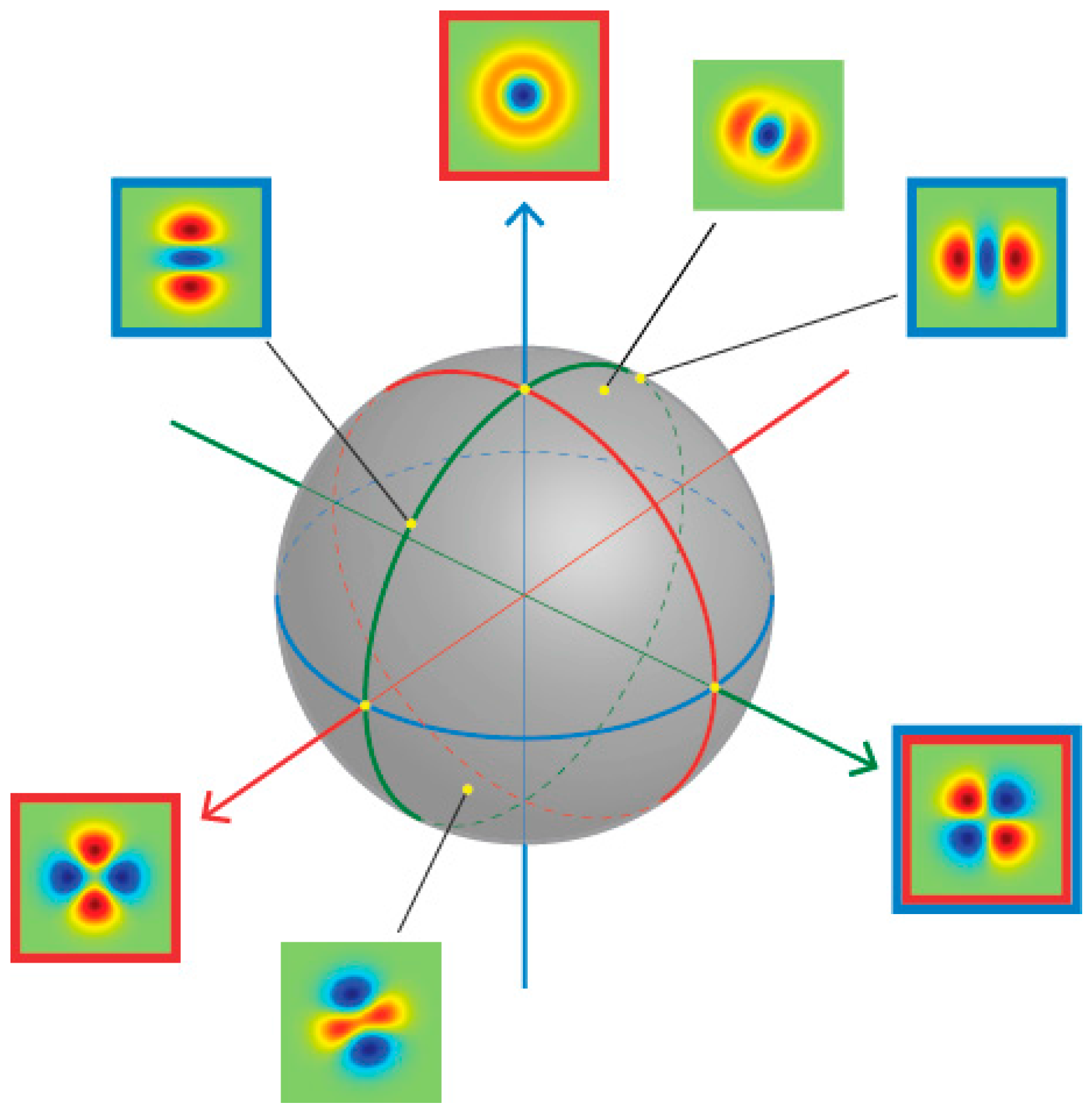
2.1. Two-Dimensional Hermite Functions: Definition and Properties
2.2. Two-Dimensional Hermite Functions: Explicit Expressions
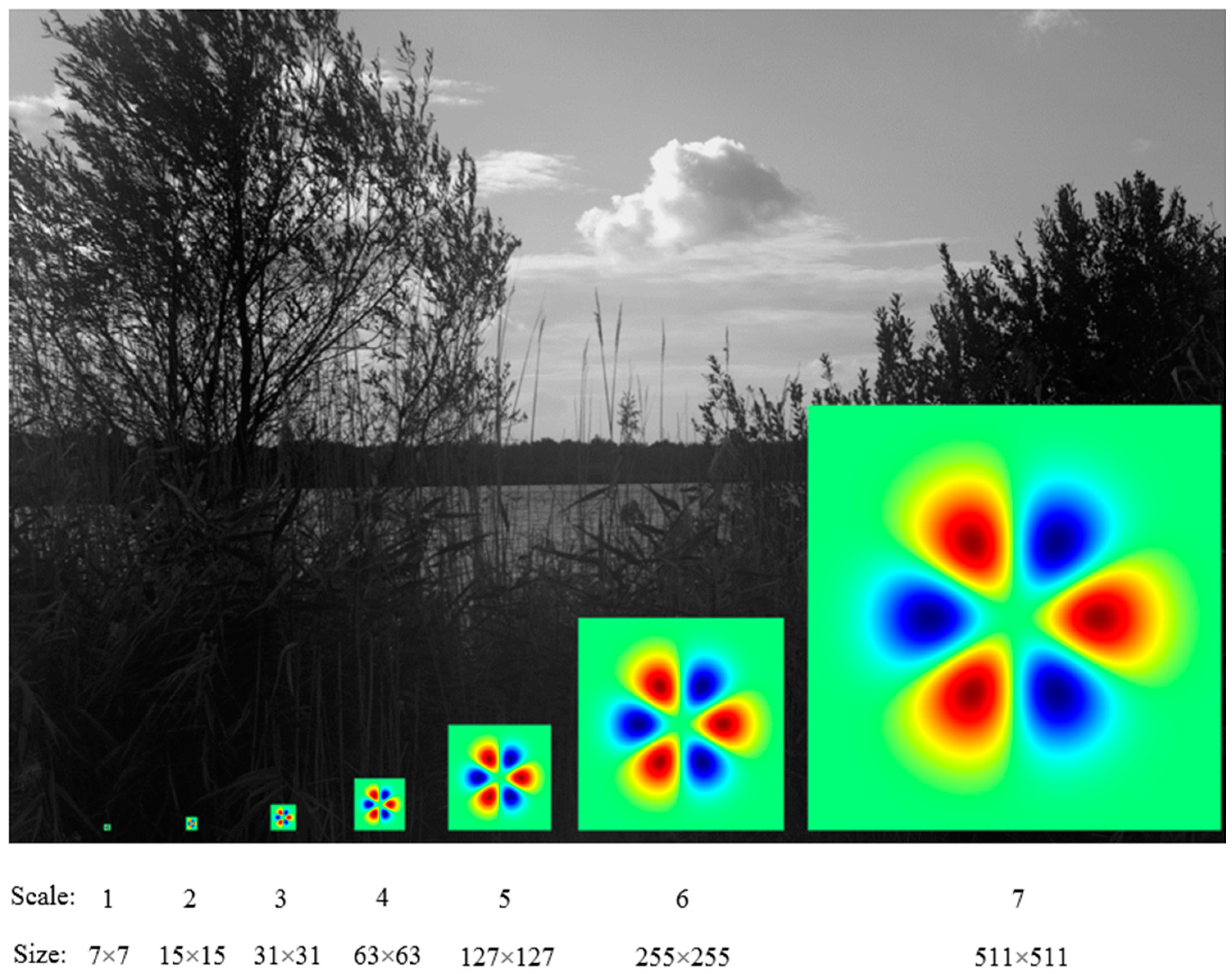
2.3. Natural Images
2.4. Analysis
3. Results
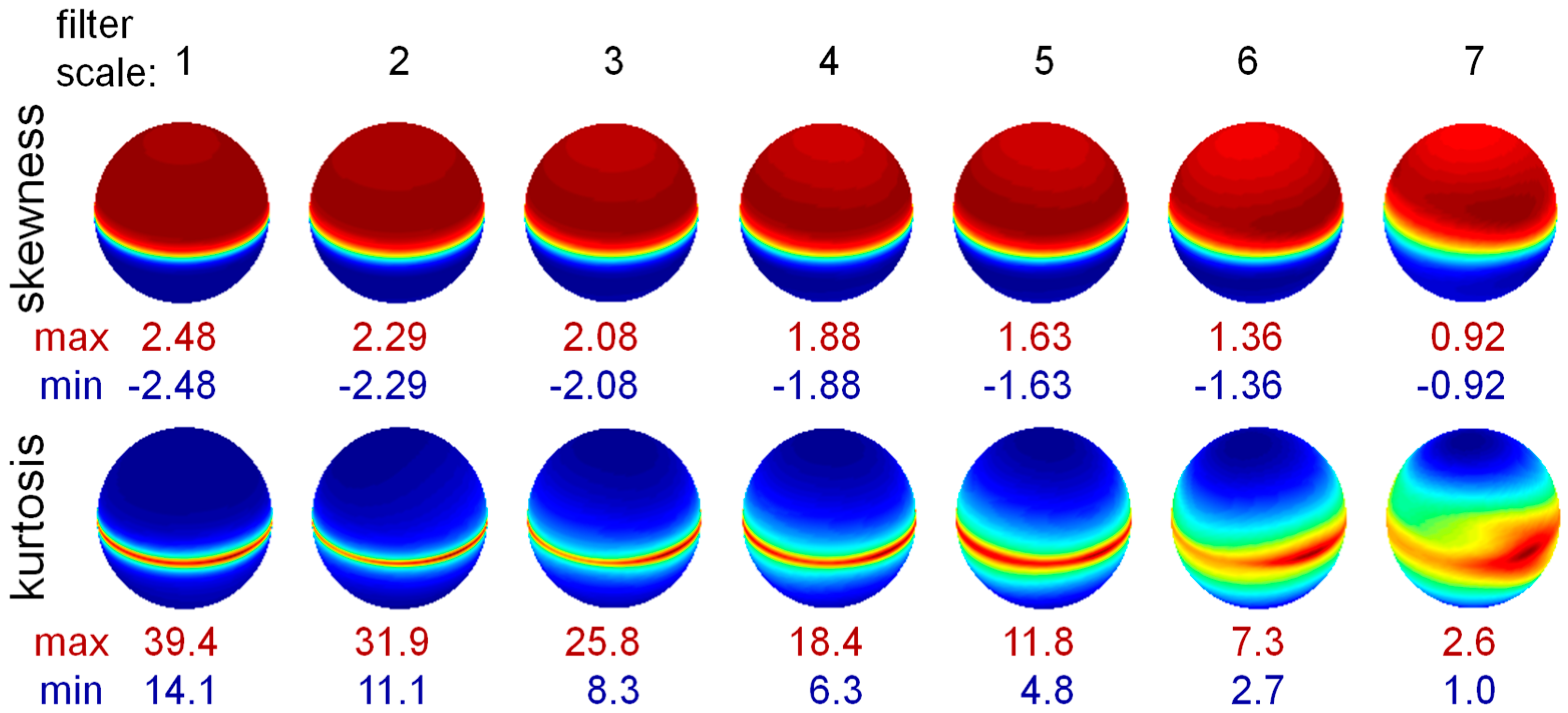
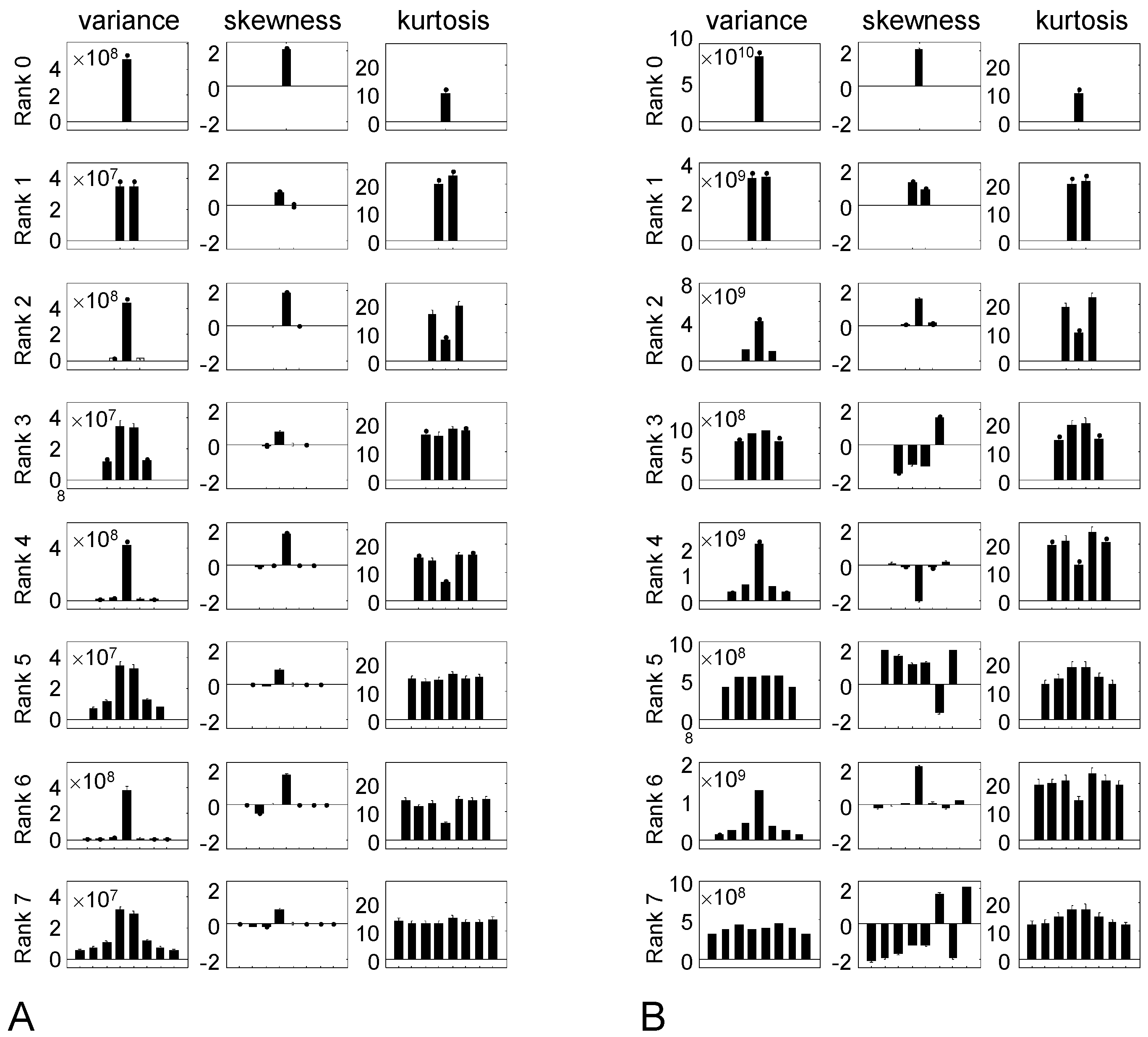
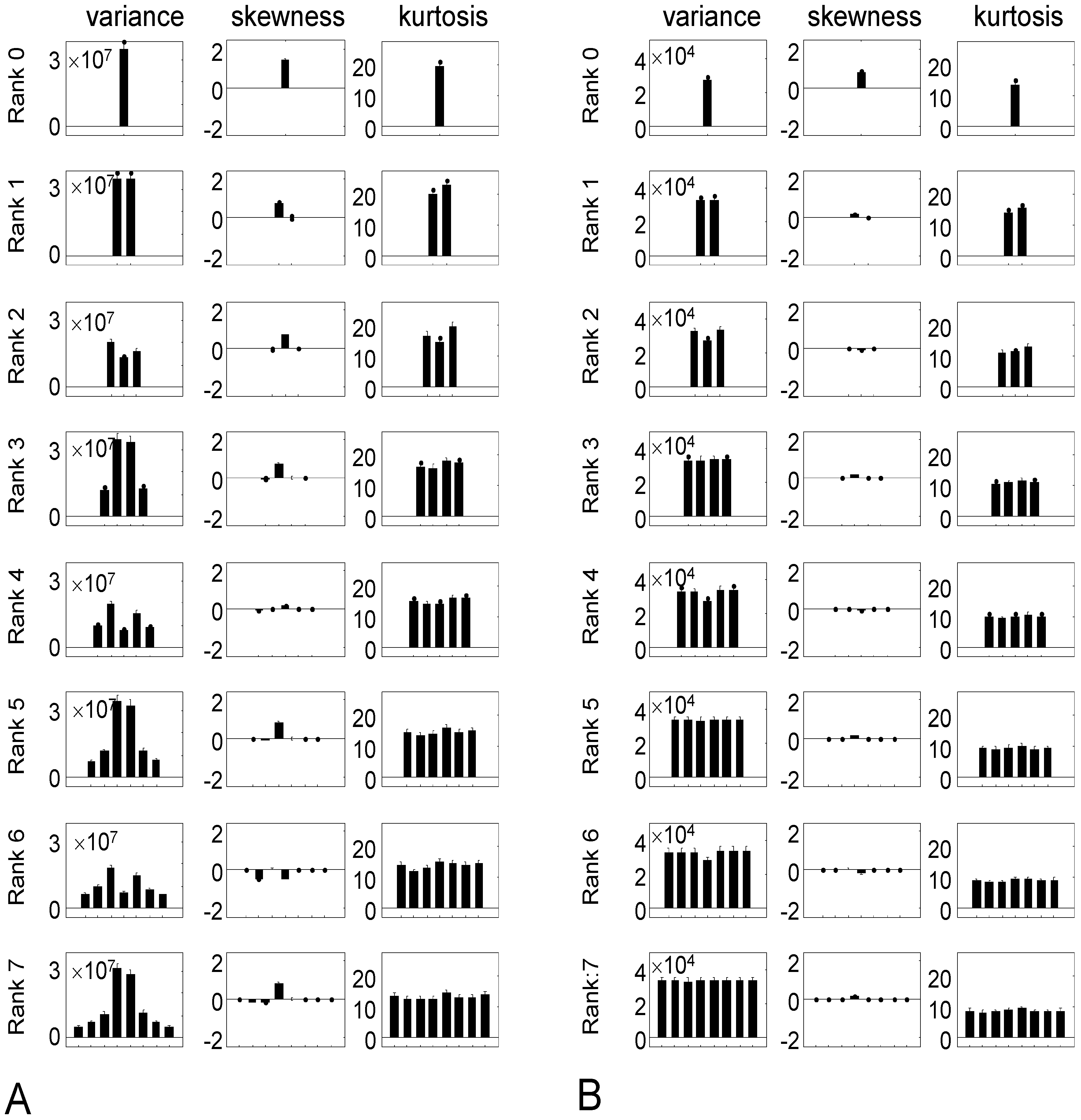
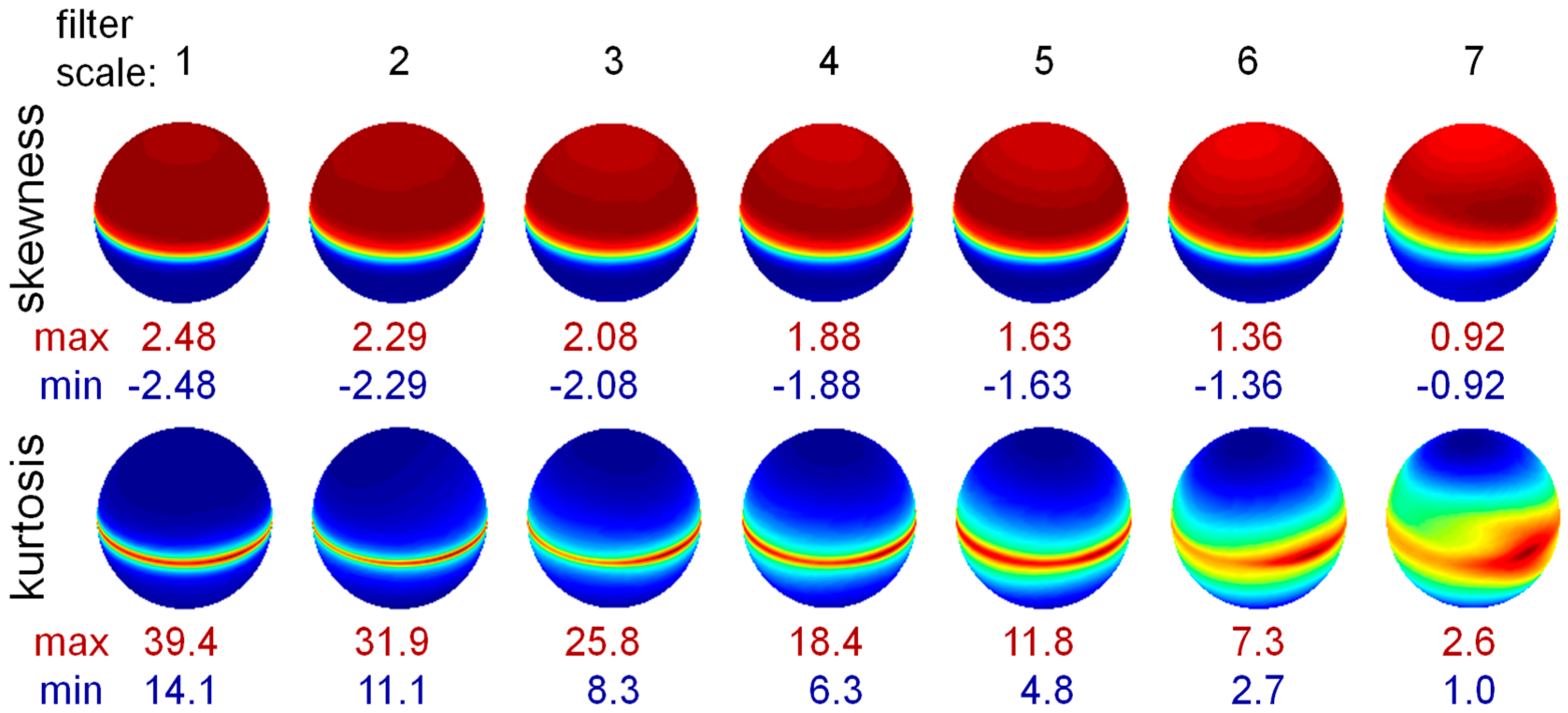
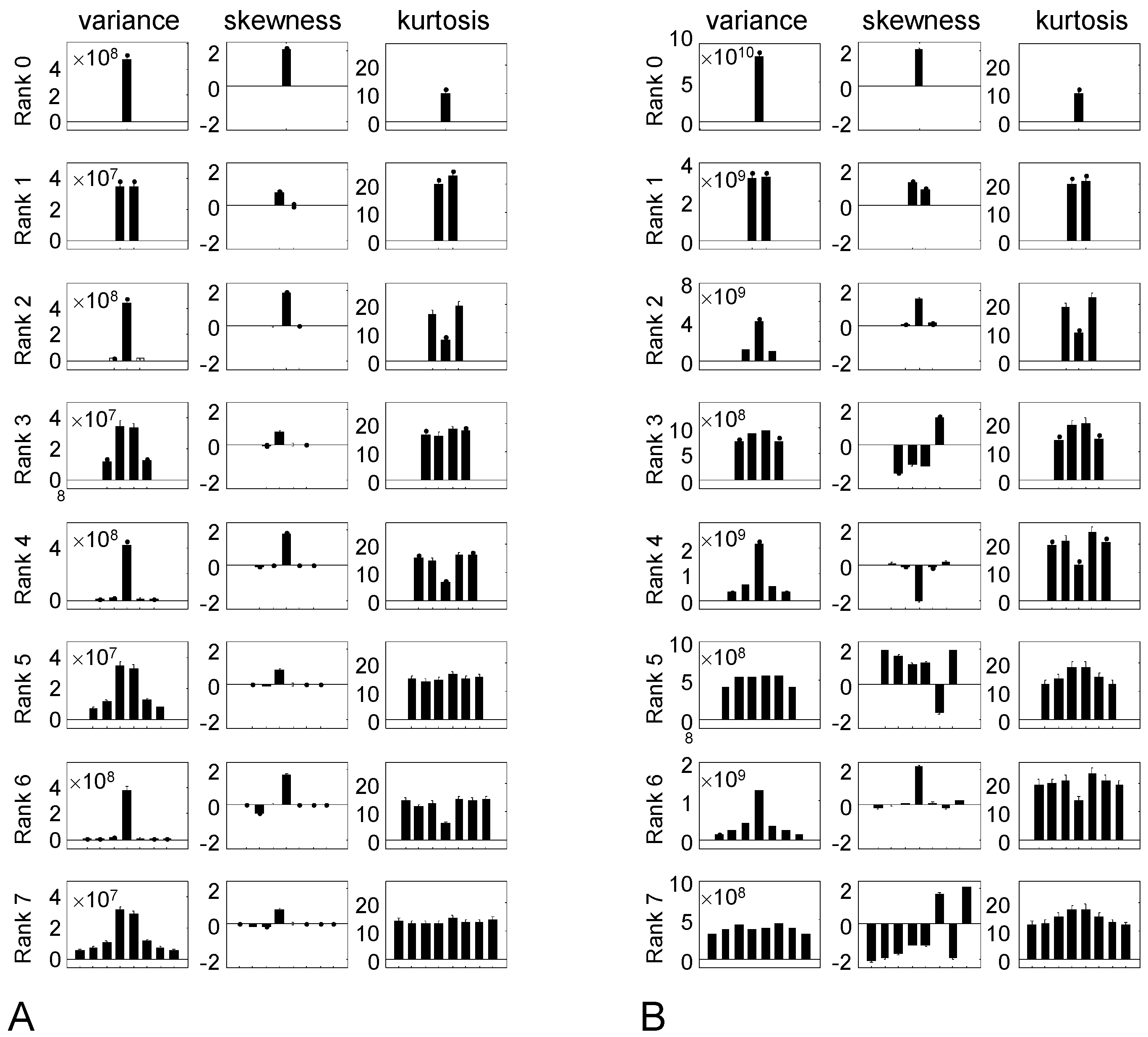
3.1. Statistics of Rank Two TDH Filter Coefficients for Natural Images
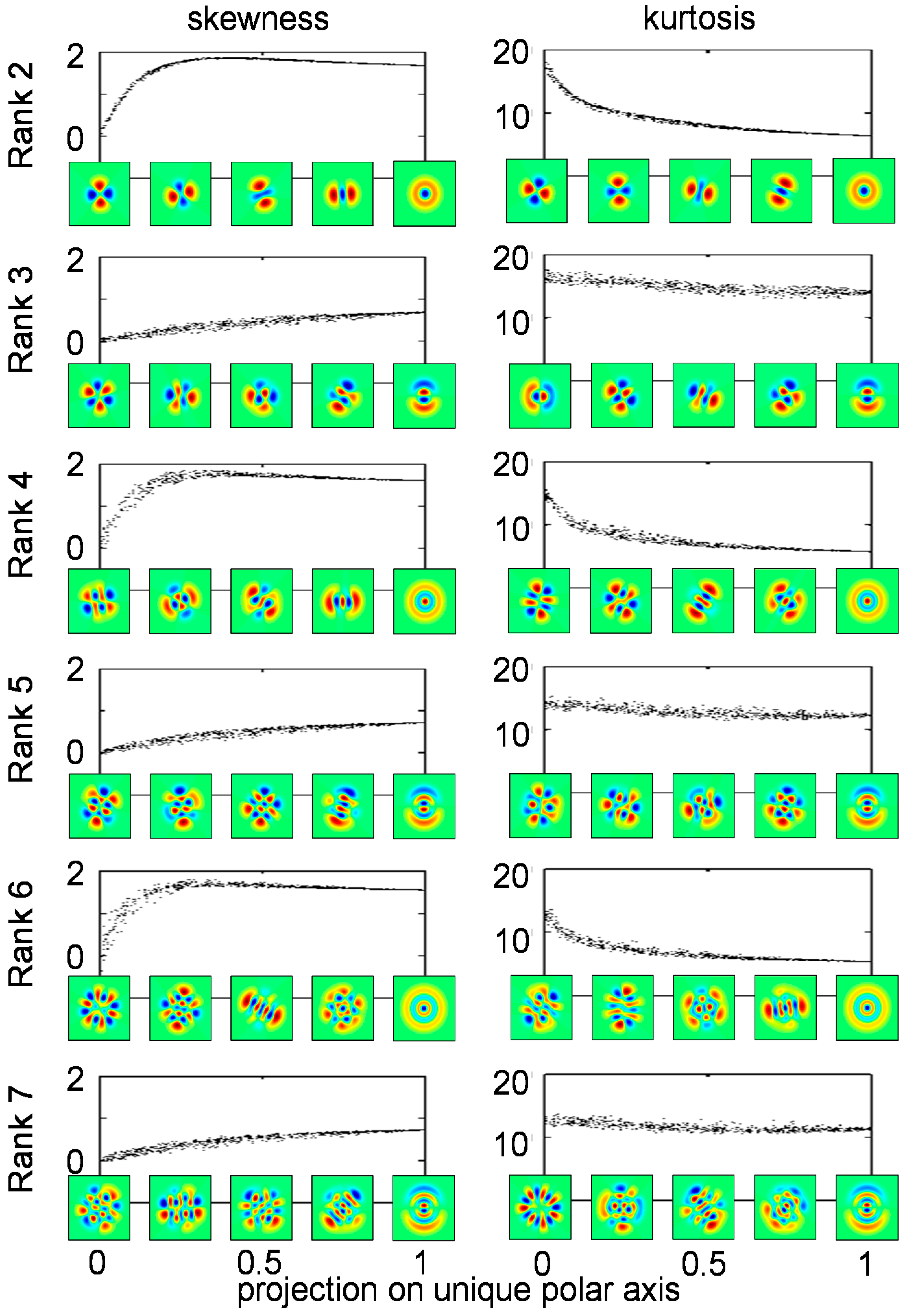
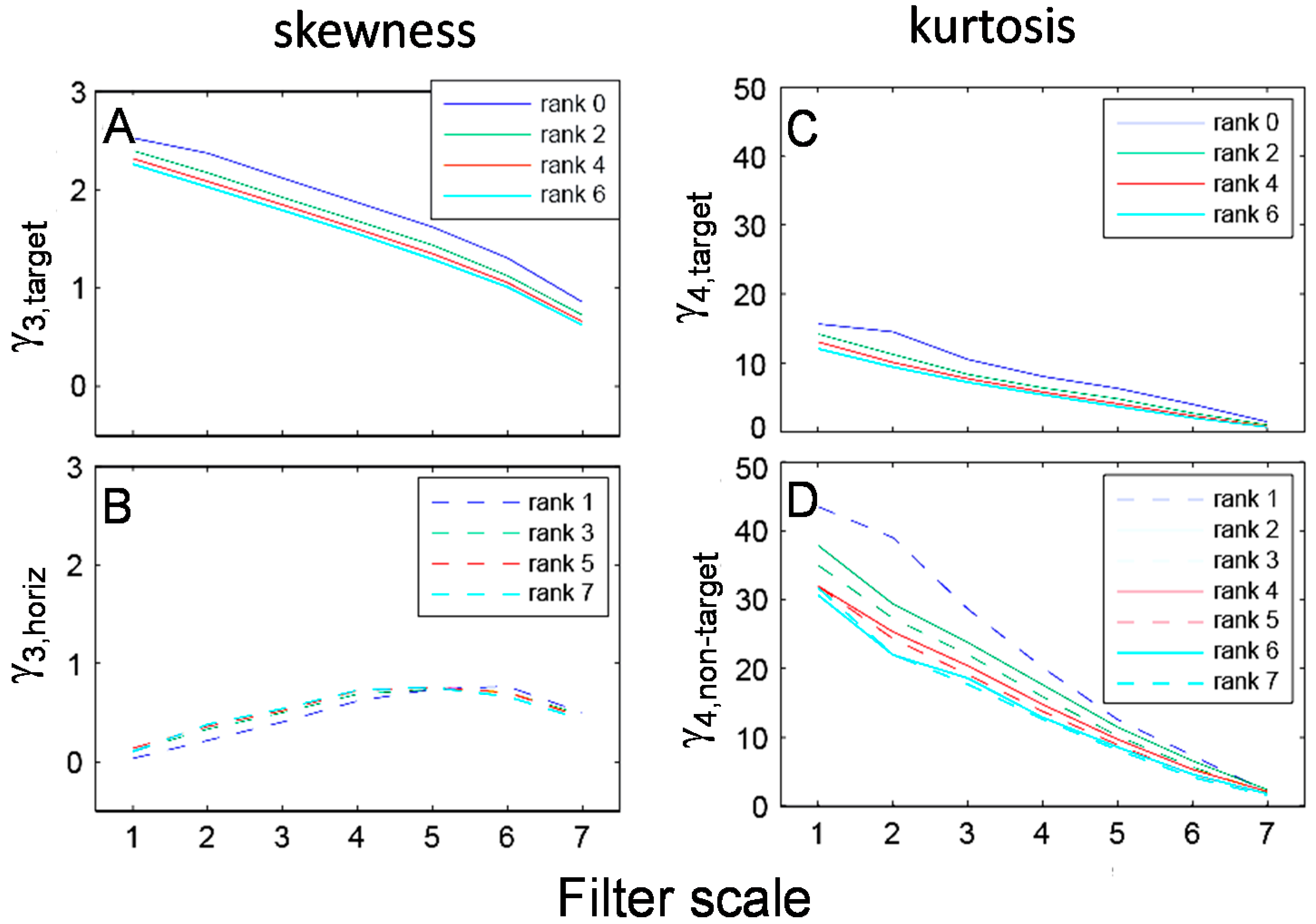
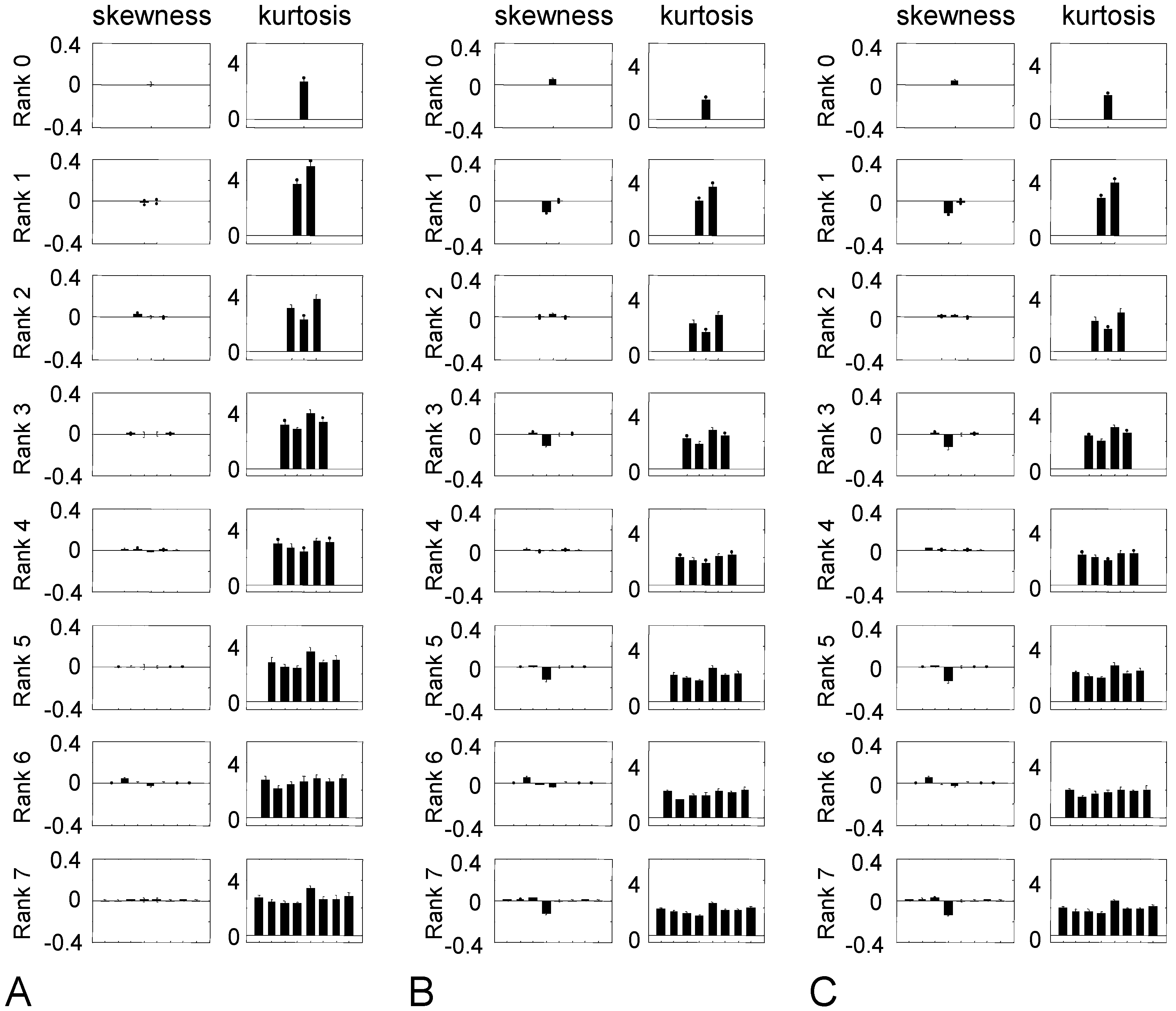
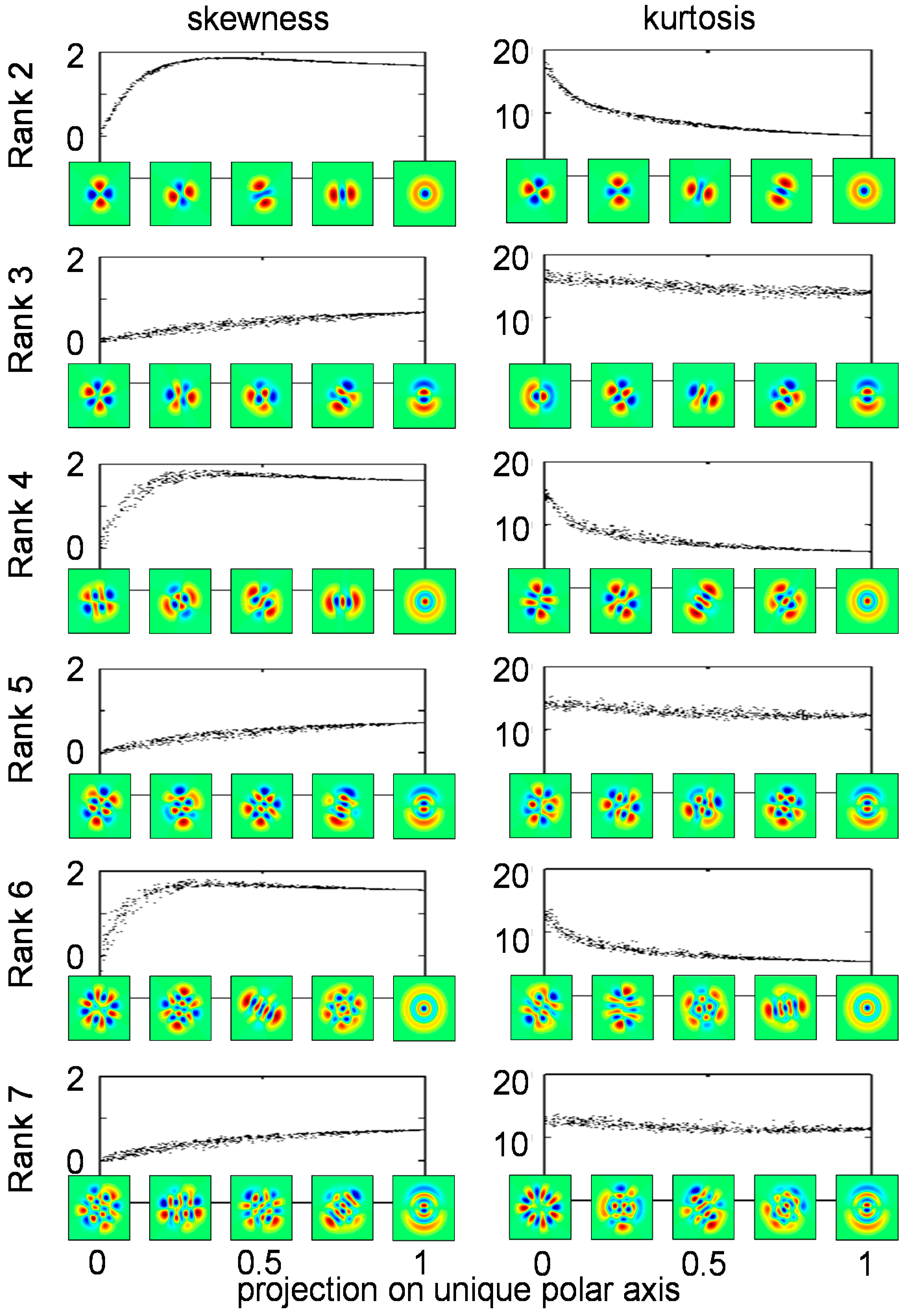
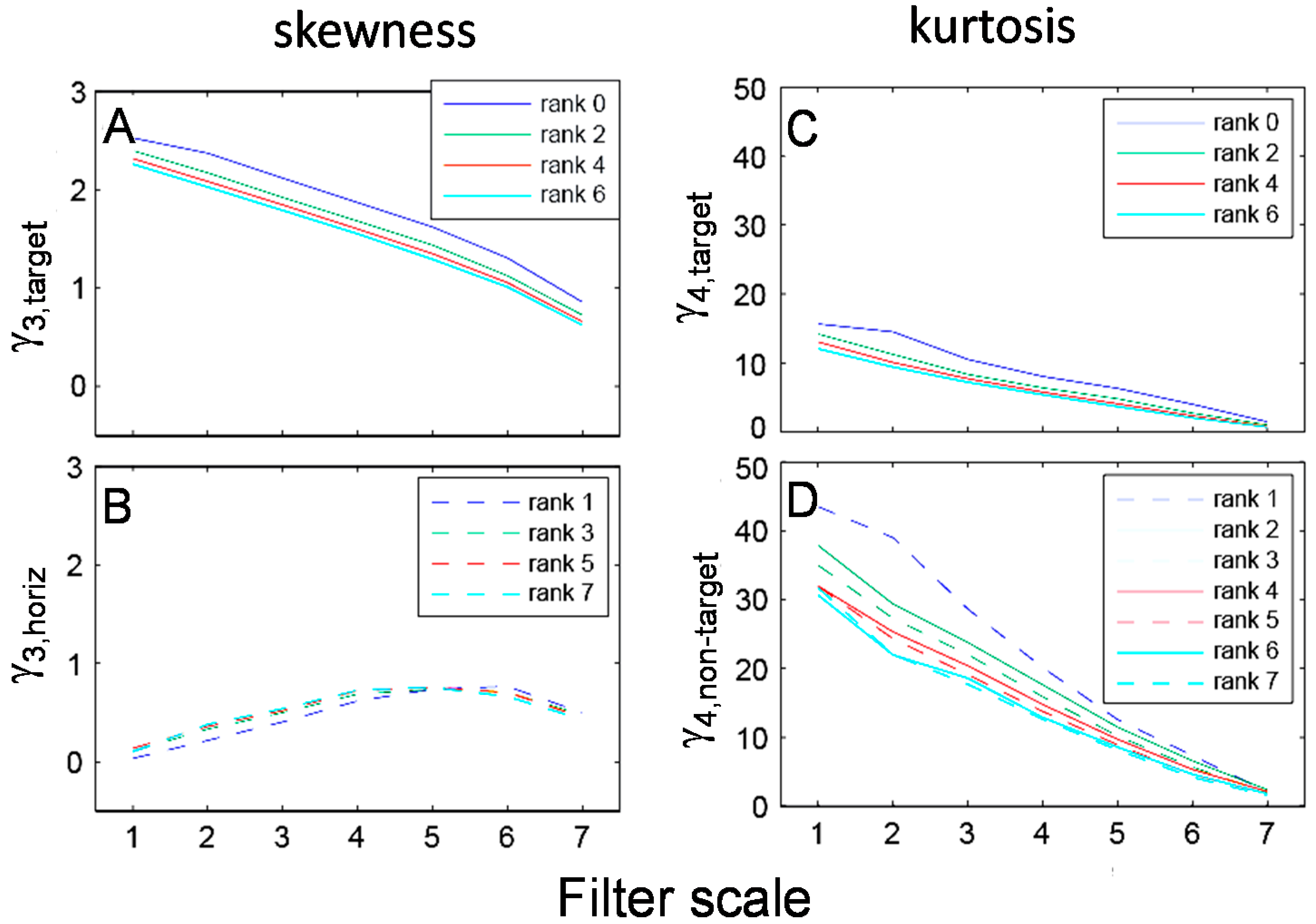
3.2. Statistics of Higher-Rank TDH Filter Coefficients for Natural Images
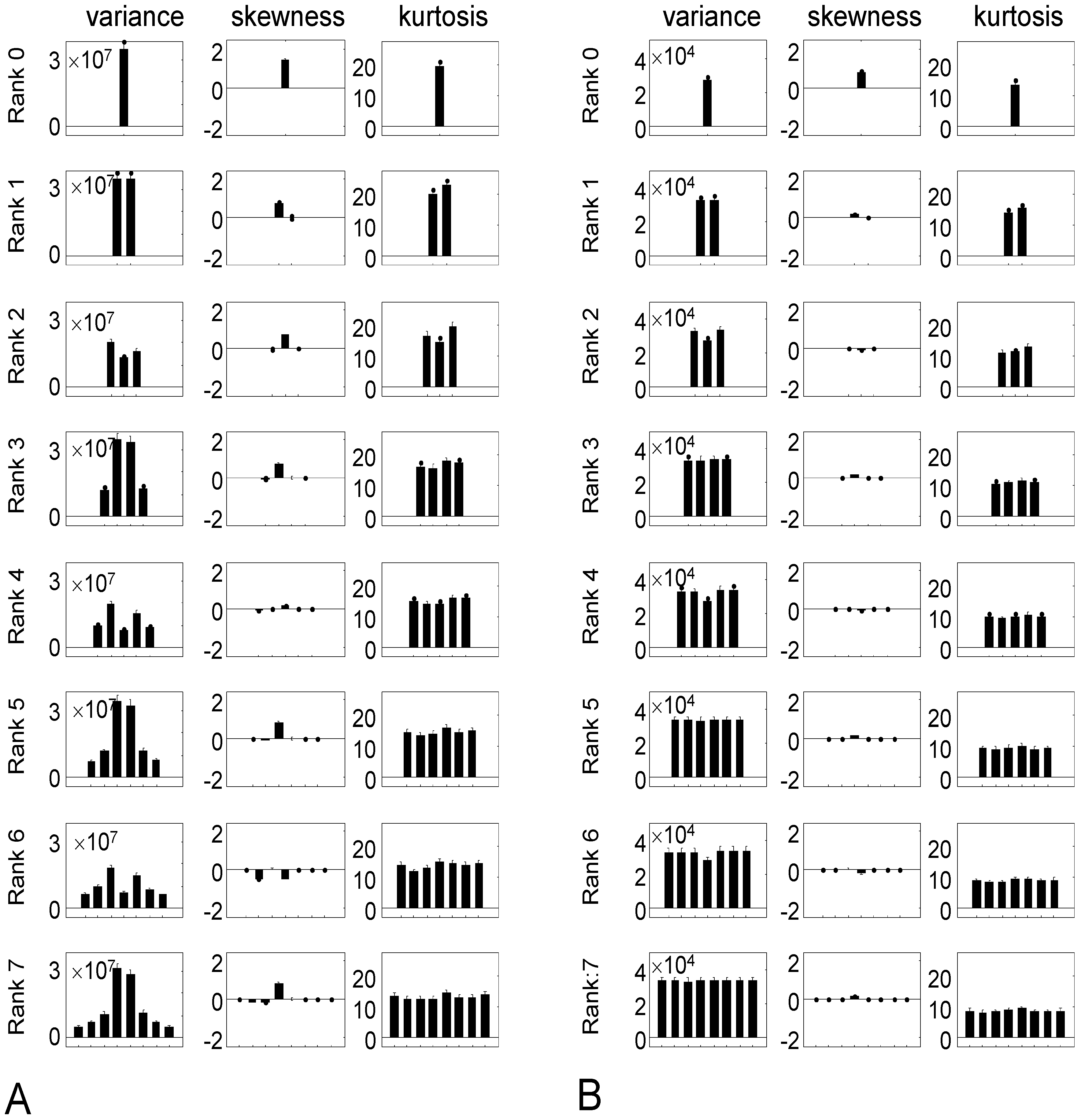
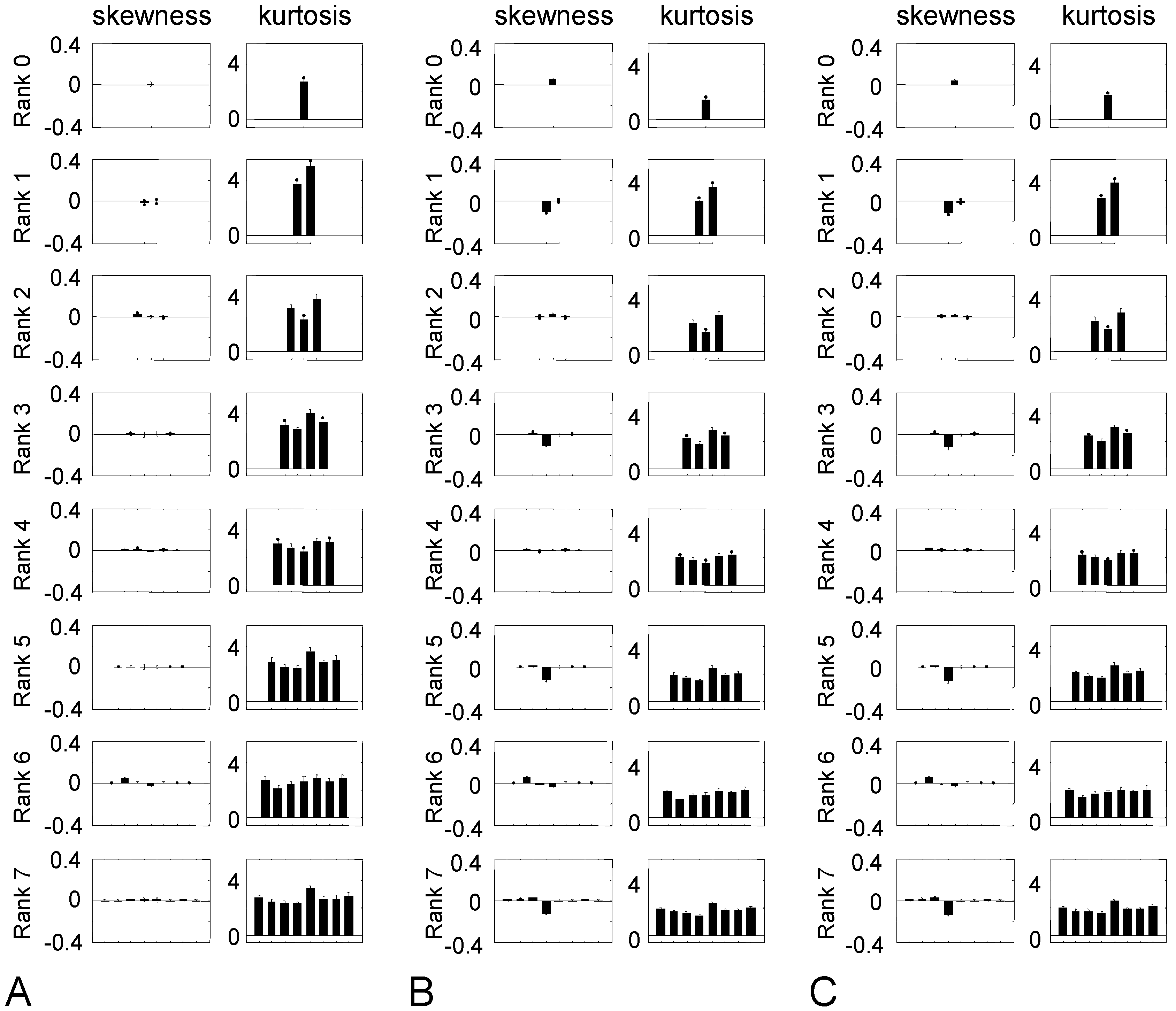
3.3. Statistics TDH Filter Coefficients for Altered Images
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| TDH | Two-dimensional Hermite |
References
- Elder, J.H.; Victor, J.; Zucker, S.W. Understanding the statistics of the natural environment and their implications for vision. Vis. Res. 2016, 120, 1–4. [Google Scholar] [CrossRef] [PubMed]
- Pouli, T.; Cunningham, D.W.; Reinhard, E. Image statistics and their applications in computer graphics. Proceedings of Eurographics. State Art Rep. 2010, 72, 83–112. [Google Scholar]
- Farid, H.; Lyu, S. Higher-order wavelet statistics and their application to digital forensics. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 16–22 June 2003; pp. 94–101.
- Lyu, S.W.; Farid, H. Steganalysis using higher-order image statistics. IEEE Trans. Inf. Forensics Secur. 2006, 1, 111–119. [Google Scholar] [CrossRef]
- Lyu, S.; Farid, H. Detecting hidden messages using higher-order statistics and support vector machines. Inf. Hiding 2003, 2578, 340–354. [Google Scholar]
- Lyu, S.; Rockmore, D.; Farid, H. A digital technique for art authentication. Proc. Natl. Acad. Sci. USA 2004, 101, 17006–17010. [Google Scholar] [CrossRef] [PubMed]
- Chainais, P. Infinitely divisible cascades to model the statistics of natural images. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 2105–2419. [Google Scholar] [CrossRef] [PubMed]
- Oppenheim, A.V.; Lim, J.S. The importance of phase in signals. Proc. IEEE 1981, 69, 529–541. [Google Scholar] [CrossRef]
- Morrone, M.C.; Burr, D.C. Feature detection in human vision: a phase-dependent energy model. Proc. R. Soc. Lond. B Biol. Sci. 1988, 235, 221–245. [Google Scholar] [CrossRef] [PubMed]
- Field, D.J. Relations between the statistics of natural images and the response properties of cortical cells. J. Opt. Soc. Am. A 1987, 4, 2379–2394. [Google Scholar] [CrossRef] [PubMed]
- Tolhurst, D.J.; Tadmor, Y.; Chao, T. Amplitude spectra of natural images. Ophthalmic Physiol. Opt. 1992, 12, 229–232. [Google Scholar] [CrossRef] [PubMed]
- Ruderman, D.L. Origins of scaling in natural images. Vis. Res. 1997, 37, 3385–3398. [Google Scholar] [CrossRef]
- Tadmor, Y.; Tolhurst, D.J. Both the phase and the amplitude spectrum may determine the appearance of natural images. Vis. Res. 1993, 33, 141–145. [Google Scholar] [CrossRef]
- Van Hateren, J.H.; Ruderman, D.L. Independent component analysis of natural image sequences yields spatio-temporal filters similar to simple cells in primary visual cortex. Proc. R. Soc. Lond. B Biol. Sci. 1998, 265, 2315–2320. [Google Scholar] [CrossRef] [PubMed]
- Van Hateren, J.H.; van der Schaaf, A. Independent component filters of natural images compared with simple cells in primary visual cortex. Proc. Biol. Sci. 1998, 265, 359–366. [Google Scholar] [CrossRef] [PubMed]
- Simoncelli, E.P. Statistical modeling of photographic images. In Handbook of Image and Video Processing; Bovic, A.C., Ed.; Academic Press: Burlington, MA, USA, 2005; pp. 431–441. [Google Scholar]
- Lyu, S.; Simoncelli, E.P. Nonlinear extraction of independent components of natural images using radial gaussianization. Neural Comput. 2009, 21, 1485–1519. [Google Scholar] [CrossRef] [PubMed]
- Zetzsche, C.; Nuding, U. Nonlinear and higher-order approaches to the encoding of natural scenes. Network 2005, 16, 191–221. [Google Scholar] [CrossRef] [PubMed]
- Martens, J.B. The Hermite Transform—Applications. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1607–1618. [Google Scholar] [CrossRef]
- Martens, J.B. The Hermite Transform—Theory. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1595–1606. [Google Scholar] [CrossRef]
- Martens, J.B. Local orientation analysis in images by means of the Hermite transform. IEEE Trans. Image Process. 1997, 6, 1103–1116. [Google Scholar] [CrossRef] [PubMed]
- VanDijk, A.M.; Martens, J.B. Representation and compression with steered Hermite transforms. Signal Process. 1997, 56, 1–16. [Google Scholar] [CrossRef]
- Refregier, A.; Shapelets, I. A method for image analysis. Mon. Not. R. Astron. Soc. 2003, 338, 35–47. [Google Scholar] [CrossRef]
- Silvan-Cardenas, J.L.; Escalante-Ramirez, B. The multiscale hermite transform for local orientation analysis. IEEE Trans. Image Process. 2006, 15, 1236–1253. [Google Scholar] [CrossRef] [PubMed]
- Victor, J.D.; Knight, B.W. Simultaneously band and space limited functions in two dimensions, and receptive fields of visual neurons. In Springer Applied Mathematical Sciences Series; Kaplan, E., Marsden, J., Sreenivasan, K.R., Eds.; Springer: New York, NY, USA, 2003; pp. 375–420. [Google Scholar]
- Slepian, D.; Pollack, H. Prolate spheroidal wave functions, Fourier analysis and uncertainty—I. Bell Syst. Tech. J. 1961, 40, 43–64. [Google Scholar] [CrossRef]
- Slepian, D. Prolate spheroidal wave functions, Fourier analysis and uncertainty—IV: Extensions to many dimensions; generalized prolate spheroidal functions. Bell Syst. Tech. 1964, 43, 3009–3057. [Google Scholar] [CrossRef]
- Knight, B.; Sirovich, L. The Wigner transform and some exact properties of linear operators. SIAM J. Appl. Math. 1982, 42, 378–389. [Google Scholar] [CrossRef]
- Victor, J.D.; Mechler, F.; Repucci, M.A.; Purpura, K.P.; Sharpee, T. Responses of V1 neurons to two-dimensional Hermite functions. J. Neurophysiol. 2006, 95, 379–400. [Google Scholar] [CrossRef] [PubMed]
- Ruderman, D.L. The statistics of natural images. Netw. Comput. Neural Syst. 1994, 5, 517–548. [Google Scholar] [CrossRef]
- Sharpee, T.O.; Victor, J.D. Contextual modulation of V1 receptive fields depends on their spatial symmetry. J. Comput. Neurosci. 2009, 26, 203–218. [Google Scholar] [CrossRef] [PubMed]
- Sinz, F.H.; Simoncelli, E.; Bethge, M. Hierarchical modeling of local image features through L_p-nested symmetric distributions. Adv. Neural Inf. Process. Syst. 2010, 22, 1696–1704. [Google Scholar]
- Bethge, M. Factorial coding of natural images: how effective are linear models in removing higher-order dependencies? J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2006, 23, 1253–1268. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Lyu, S. Using projection kurtosis concentration of natural images for blind noise covariance matrix estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014.
- Motoyoshi, I.; Nishida, S.Y.; Sharan, L.; Adelson, E.H. Image statistics and the perception of surface qualities. Nature 2007, 447, 206–209. [Google Scholar] [CrossRef] [PubMed]
- Graham, D.; Schwarz, B.; Chatterjee, A.; Leder, H. Preference for luminance histogram regularities in natural scenes. Vis. Res. 2016, 120, 11–21. [Google Scholar] [CrossRef] [PubMed]
- Portilla, J.; Simoncelli, E.P. A parametric texture model based on joint statistics of complex wavelet coefficients. Int. J. Comput. Vis. 2000, 40, 49–71. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Q.; Victor, J.D. Two-Dimensional Hermite Filters Simplify the Description of High-Order Statistics of Natural Images. Symmetry 2016, 8, 98. https://doi.org/10.3390/sym8090098
Hu Q, Victor JD. Two-Dimensional Hermite Filters Simplify the Description of High-Order Statistics of Natural Images. Symmetry. 2016; 8(9):98. https://doi.org/10.3390/sym8090098
Chicago/Turabian StyleHu, Qin, and Jonathan D. Victor. 2016. "Two-Dimensional Hermite Filters Simplify the Description of High-Order Statistics of Natural Images" Symmetry 8, no. 9: 98. https://doi.org/10.3390/sym8090098
APA StyleHu, Q., & Victor, J. D. (2016). Two-Dimensional Hermite Filters Simplify the Description of High-Order Statistics of Natural Images. Symmetry, 8(9), 98. https://doi.org/10.3390/sym8090098