Symmetry Perspectives on Some Auxetic Body-Bar Frameworks

{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Counting and Symmetry Versions of Periodic Mobility Rules
2.1. Pin-Jointed Frameworks
2.2. Body-and-Joint Frameworks
2.3. Body-Bar Frameworks
3. Symmetry and Equiauxetic Frameworks
 6, so that the presence of an unblocked mechanism of either A or B symmetry would be sufficient to guarantee equiauxetic behaviour.
6, so that the presence of an unblocked mechanism of either A or B symmetry would be sufficient to guarantee equiauxetic behaviour.4. Two-Dimensional Hinged-Hexagon Frameworks
6, as noted above.4.1. Single-Link Framework
| Group
6 | E | C6 | C3 | ||||
| Γ(υ, C) × (ΓT + ΓR) | k2 | 1 | 1 | 1 | 4 | 1 | 1 |
| 3 | 2 | 0 | −1 | −1 | 0 | 2 | |
| −Γ(e, C) + (ΓT × ΓT) − ΓT − ΓR | 3k2 | 2 | 0 | −1 | −4 | 0 | 2 |
| −3k2 | 0 | 0 | −3 | 0 | 0 | 0 | |
| 1 | −1 | 1 | 5 | 5 | 1 | −1 | |
| = Γ(m) − Γ(s) | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
4.2. Double-Link Framework
| Group
6 | E | C6 | C3 | ||||
| Γ(υ, C) × (ΓT + ΓR) | k2 | 1 | 1 | 1 | 4 | 1 | 1 |
| 3 | 2 | 0 | −1 | −1 | 0 | 2 | |
| −Γ(e, C) + (ΓT × ΓT) − ΓT − ΓR | 3k2 | 2 | 0 | −1 | −4 | 0 | 2 |
| −6k2 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | −1 | 1 | 5 | 5 | 1 | −1 | |
| = Γ(m) − Γ(s) | 1 − 3k2 | 1 | 1 | 4 | 1 | 1 | 1 |
6 occur in Γ(m) − Γ(s) with negative weight: in other words, only states of self-stress are detected by symmetry. The factor group analysis for k > 1 no longer enforces the equivalence of all bars, no longer forcing the parallel pairing of bars that is required for the k = 1 motion.5. Frameworks based on Other Regular Tessellations
5.1. Double-Link Framework based on the Triangular Tessellation
6. The usual tabular calculation for Γ(m) = Γ(s) gives the results shown below.
| Group
6 | E | C6 | C3 | C2 | |||
| Γ(υ, C) × (ΓT + ΓR) | 2k2 | 0 | 2 | 0 | 2 | 0 | |
| 3 | 2 | 0 | −1 | 0 | 2 | ||
| −Γ(e, C) + (ΓT × ΓT) − ΓT − ΓR | 6k2 | 0 | 0 | 0 | 0 | 0 | |
| −6k2 | 0 | 0 | 0 | 0 | 0 | ||
| 1 | −1 | 1 | 5 | 1 | −1 | ||
| = Γ(m) − Γ(s) | 1 | −1 | 1 | 5 | 1 | −1 | |
5.2. Double-Link Framework based on the Square Tessellation
4. The usual tabular calculation gives
| Group
4 | E | ||||||
| Γ(υ, C) × (ΓT + ΓR) | k2 | 1 | 2 | 1 | 4 | 1 | 2 |
| 3 | 1 | 1 | −1 | −1 | 1 | 1 | |
| −Γ(e, C) + (ΓT × ΓT) − ΓT − ΓR | 3k2 | 1 | 2 | −1 | −4 | 1 | 2 |
| −4k2 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | −1 | −1 | 5 | 5 | −1 | −1 | |
| = Γ (m) − Γ(s) | 1 − k2 | 0 | 1 | 4 | 1 | 0 | 1 |
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Maxwell, J.C. On the calculation of the equilibrium and stiffness of frames. Philos. Mag. 1864, 27, 294–299. [Google Scholar]
- Calladine, C.R. Buckminster Fuller's “Tensegrity” structures and Clerk Maxwell's rules for the construction of stiff frames. Int. J. Solids Struct. 1978, 14, 161–172. [Google Scholar]
- Grübler, M. Getriebelehre; Springer: Berlin, Germany, 1917. [Google Scholar]
- Kutzbach, K. Mechanische Leitungsverzweigung, ihre Gesetze und Anwendungen. Maschinenbau Betr. 1929, 8, 710–716, in German. [Google Scholar]
- Fowler, P.W.; Guest, S.D. A symmetry extension of Maxwell's rule for rigidity of frames. Int. J. Solids Struct. 2000, 37, 1793–1804. [Google Scholar]
- Guest, S.D.; Fowler, P.W. A symmetry-extended mobility rule. Mech. Mach. Theory 2005, 40, 1002–1014. [Google Scholar]
- Guest, S.D.; Schulze, B.; Whiteley, W.J. When is a body-bar structure isostatic? Int. J. Solids Struct. 2010, 47, 2745–2754. [Google Scholar]
- Fowler, P.W.; Guest, S.D. A symmetry analysis of mechanisms in rotating rings of tetrahedra. Proc. R. Soc. A Math. Phys. Eng. Sci. 2005, 461, 1829–1846. [Google Scholar]
- Guest, S.D.; Fowler, P.W. Mobility of ‘N-loops’: Bodies cyclically connected by intersecting revolute hinges. Proc. R. Soc. A Math. Phys. Eng. Sci. 2010, 466, 63–77. [Google Scholar]
- Fowler, P.W.; Guest, S.D. Symmetry and states of self-stress in triangulated toroidal frames. Int. J. Solids Struct. 2002, 39, 4385–4393. [Google Scholar]
- Chen, Y.; Guest, S.D.; Fowler, P.W. Two-Orbit Switch-Pitch Structures. J. IASS 2012, 53, 157–162. [Google Scholar]
- Kovács, F.; Tarnai, T.; Fowler, P.W.; Guest, S.D. A class of expandable polyhedral structures. Int. J. Solids Struct. 2004, 41, 1119–1137. [Google Scholar]
- Kovács, F.; Tarnai, T.; Guest, S.D.; Fowler, P.W. Double-link expandohedra: A mechanical model for expansion of a virus. Proc. R. Soc. A Math. Phys. Eng. Sci. 2004, 460, 3191–3202. [Google Scholar]
- Connelly, R.; Fowler, P.W.; Guest, S.D.; Schulze, B.; Whiteley, W.J. When is a symmetric pin-jointed framework isostatic? Int. J. Solids Struct. 2009, 46, 762–773. [Google Scholar]
- Schulze, B.; Sljoka, A.; Whiteley, W. How does symmetry impact the flexibility of proteins? Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2014, 372. [Google Scholar] [CrossRef]
- Power, S.C. Polynomials for crystal frameworks and the rigid unit mode spectrum. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2014, 372. [Google Scholar] [CrossRef]
- Borcea, C.S.; Streinu, I. Frameworks with crystallographic symmetry. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2014, 372. [Google Scholar] [CrossRef]
- Guest, S.D.; Fowler, P.W. Symmetry-extended counting rules for periodic frameworks. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2014, 372. [Google Scholar] [CrossRef]
- Mitschke, H.; Schröder-Turk, G.E.; Mecke, K.; Fowler, P.W.; Guest, S.D. Symmetry detection of auxetic behaviour in 2D frameworks. Europhys. Lett. 2013, 102. [Google Scholar] [CrossRef]
- Kollár, L. Continuum method of analysis for double layer space trusses of “hexagonal over triangular mesh”. Acta Tech. Acad. Sci. Hung. 1978, 86, 55–77. [Google Scholar]
- Kollár, L.; Hegedűs, I. Analysis and Design of Space Frames by the Continuum Method; Akadémiai Kiadó: Budapest, Hungary, 1985. [Google Scholar]
- Tarnai, T. Folded Structures; Hungarian Academy of Sciences: Budapest, Hungary, 1999; in Hungarian. [Google Scholar]
- Tarnai, T. Folded Structures. Symmetry Art Sci. 2002, 2, 147–159. [Google Scholar]
- Caddock, B.D.; Evans, K.E. Microporous materials with negative Poisson's ratio. I. Microstructure and mechanical properties. J. Phys. D Appl. Phys. 1989, 22, 1877–1887. [Google Scholar]
- Speir, J.A.; Munshi, S.; Wang, G.; Baker, T.S.; Johnson, J.E. Structures of the native and swollen forms of cowpea chlorotic mottle virus determined by X-ray crystallography and cryo-electron microscopy. Structure 1995, 3, 63–78. [Google Scholar]
- Pellegrino, S.; Calladine, C.R. Matrix analysis of statically and kinematically indeterminate frameworks. Int. J. Solids Struct. 1986, 22, 409–428. [Google Scholar]
- Guest, S.D. The stiffness of prestressed frameworks: A unifying approach. Int. J. Solids Struct. 2006, 43, 842–854. [Google Scholar]
- Bishop, D.M. Group Theory and Chemistry; Clarendon Press: Oxford, UK, 1973. [Google Scholar]
- Atkins, P.W.; Child, M.S.; Phillips, C.S.G. Tables for Group Theory; Oxford University Press: Oxford, UK, 1970. [Google Scholar]
- Dove, M.T. Introduction to Lattice Dynamics; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Guest, S.D.; Hutchinson, J.W. On the determinacy of repetitive structures. J. Mech. Phys. Solids 2003, 51, 383–391. [Google Scholar]
- Burns, G.; Glazer, A.M. Space Groups for Solid State Scientists; Academic Press: New York, NY, USA, 1990. [Google Scholar]
- Tay, T.-S. Rigidity of multi-graphs. I. Linking rigid bodies in n-space. J. Comb. Theory Ser. B 1984, 36, 95–112. [Google Scholar]
- Guest, S.D.; Fowler, P.W. Symmetry conditions and finite mechanisms. J. Mech. Mater. Struct. 2007, 2, 293–301. [Google Scholar]
- Kapko, V.; Treacy, M.M.J.; Thorpe, M.F.; Guest, S.D. On the collapse of locally isostatic networks. Proc. R. Soc. A Math. Phys. Eng. Sci. 2009, 465, 3517–3530. [Google Scholar]
- Mitschke, H.; Robins, V.; Mecke, K.; Schröder-Turk, G.E. Finite auxetic deformations of plane tessellations. Proc. R. Soc. A Math. Phys. Eng. Sci. 2013, 469. [Google Scholar] [CrossRef]
- Mitschke, H. Deformations of Skeletal Structures. Master's Thesis; Universität Erlangen-Nürnberg: Erlangen, Germany, 17 August 2009. Available online: http://theorie1.physik.fau.de/research/theses/2009-dipl-hmitschke.html accessed on 13 May 2014).
6, with one 6-fold axis, two additional 3-fold axes and three additional 2-fold axes (at cell centre and centres of left/right and top/bottom edges).
6, with one 6-fold axis, two additional 3-fold axes and three additional 2-fold axes (at cell centre and centres of left/right and top/bottom edges).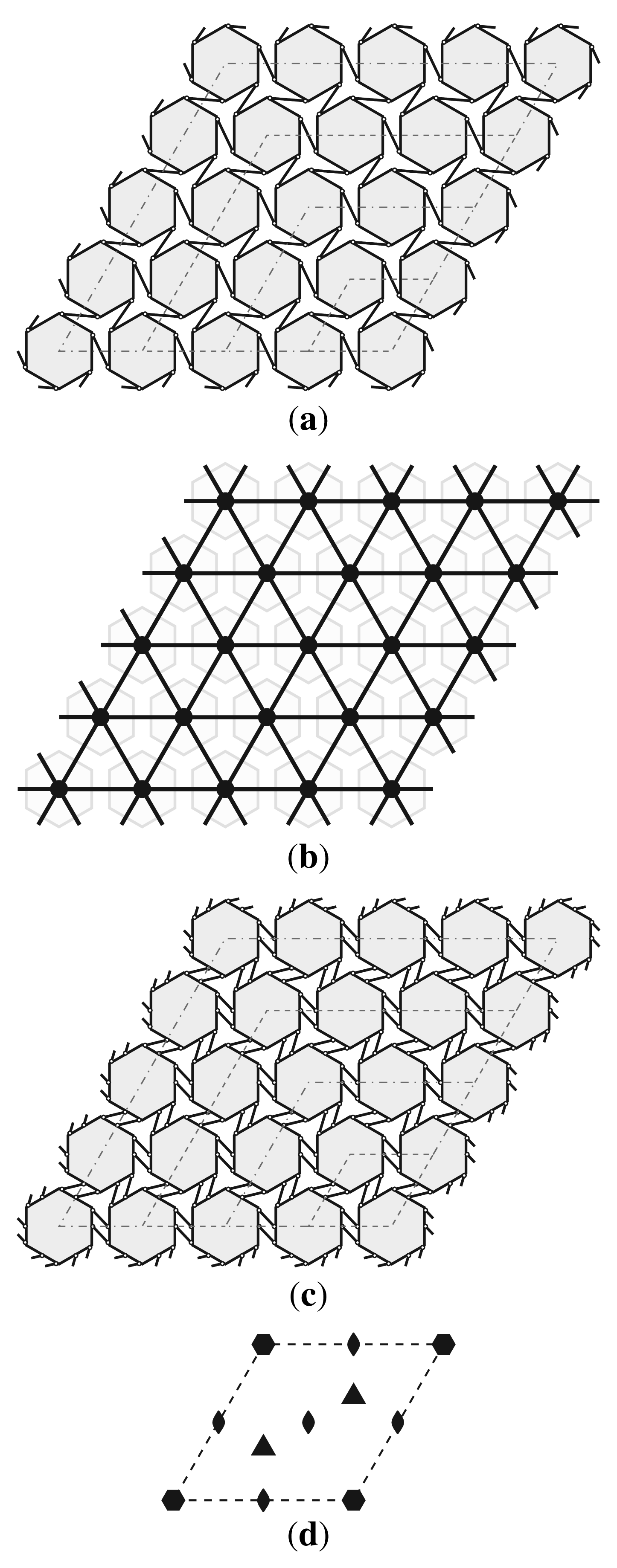 6, with one 6-fold axis, two additional 3-fold axes and three additional 2-fold axes (at cell centre and centres of left/right and top/bottom edges).
6, with one 6-fold axis, two additional 3-fold axes and three additional 2-fold axes (at cell centre and centres of left/right and top/bottom edges).
6, with one 6-fold axis, two additional 3-fold axes and three additional 2-fold axes (at cell centre and centres of left/right and top/bottom edges).
6, with one 6-fold axis, two additional 3-fold axes and three additional 2-fold axes (at cell centre and centres of left/right and top/bottom edges).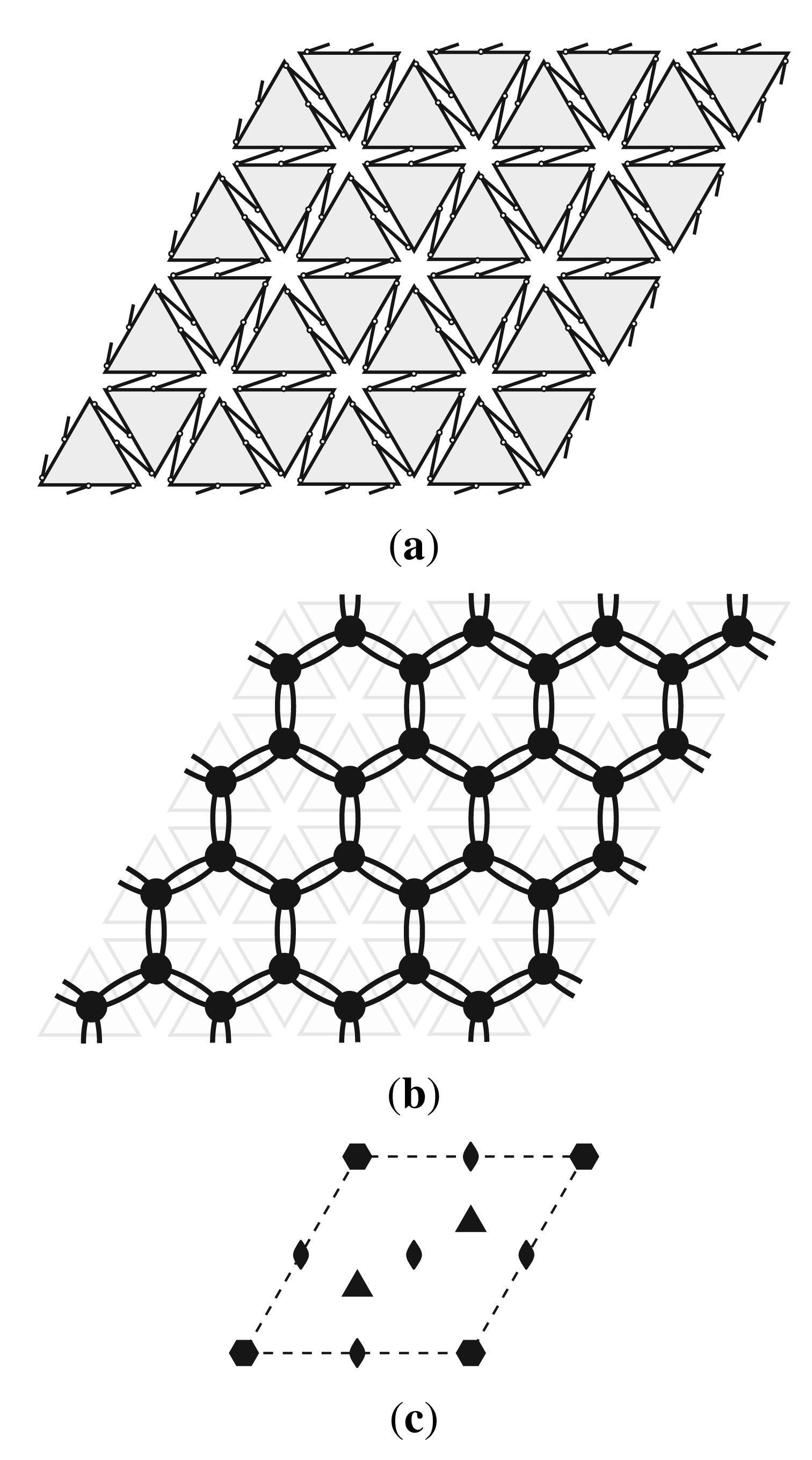 4, with two 4-fold axes (at cell centre and corners) and two additional 2-fold axes (at centres of left/right and top/bottom edges).
4, with two 4-fold axes (at cell centre and corners) and two additional 2-fold axes (at centres of left/right and top/bottom edges).
4, with two 4-fold axes (at cell centre and corners) and two additional 2-fold axes (at centres of left/right and top/bottom edges).
4, with two 4-fold axes (at cell centre and corners) and two additional 2-fold axes (at centres of left/right and top/bottom edges).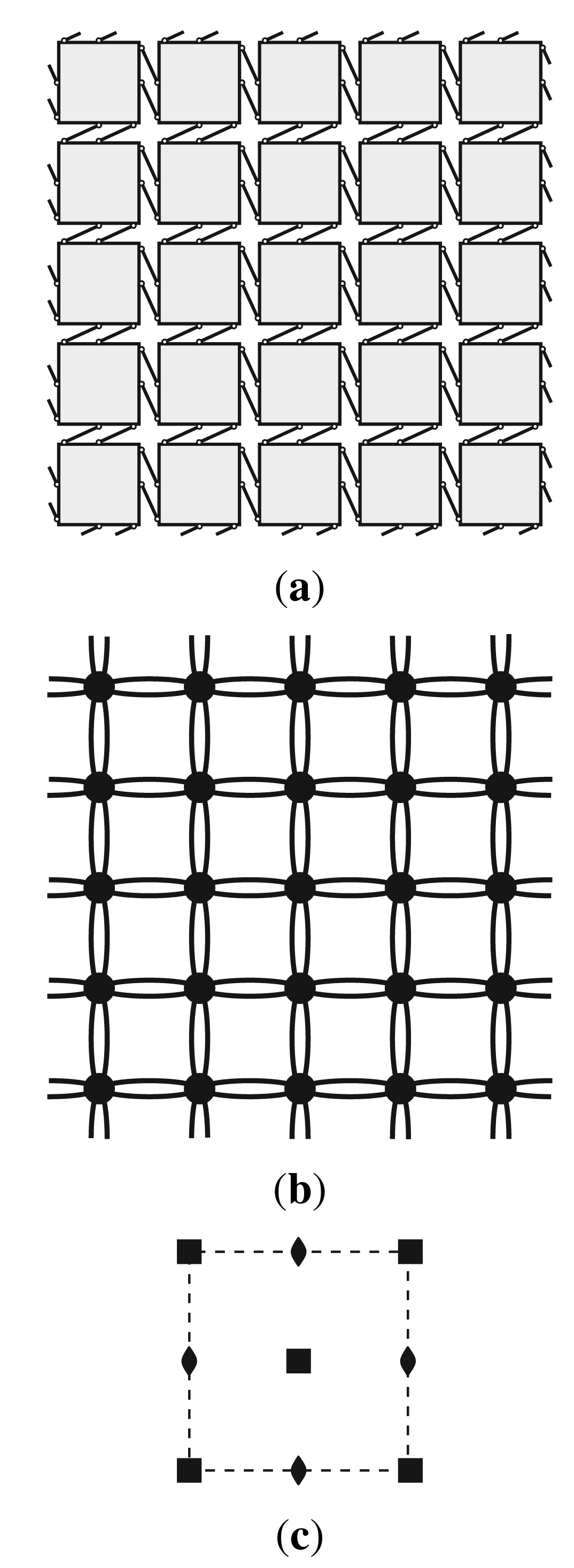
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Fowler, P.W.; Guest, S.D.; Tarnai, T. Symmetry Perspectives on Some Auxetic Body-Bar Frameworks. Symmetry 2014, 6, 368-382. https://doi.org/10.3390/sym6020368
Fowler PW, Guest SD, Tarnai T. Symmetry Perspectives on Some Auxetic Body-Bar Frameworks. Symmetry. 2014; 6(2):368-382. https://doi.org/10.3390/sym6020368
Chicago/Turabian StyleFowler, Patrick W., Simon D. Guest, and Tibor Tarnai. 2014. "Symmetry Perspectives on Some Auxetic Body-Bar Frameworks" Symmetry 6, no. 2: 368-382. https://doi.org/10.3390/sym6020368
APA StyleFowler, P. W., Guest, S. D., & Tarnai, T. (2014). Symmetry Perspectives on Some Auxetic Body-Bar Frameworks. Symmetry, 6(2), 368-382. https://doi.org/10.3390/sym6020368