
Optimization of Autonomous Vehicle Safe Passage at Intersections Based on Crossing Risk Degree


Abstract
1. Introduction
2. Literature Review
2.1. Fully Autonomous Driving Environments
2.2. Mixed Driving Environments
3. Methodology
4. Simulation Modeling
4.1. Testbed
| Algorithm 1: CRD-Based Intersection Control for Autonomous Vehicles |
| Input: (1200 veh/h), headway |
| Output: (delay, fuel consumption, |
| emissions) |
| Initialize SUMO simulation via TraCI interface; |
| StartSUMO (V); |
| for simulation time step t from 1 to 1800 do |
| vehicles TraCI.getVehicleState (sim); |
| for in vehicles do |
| ), |
| TraCI.getSpeed); |
| if then |
| Record delay, fuel consumption, CO2, CO emissions via |
| ), |
| ); |
| lane with vehicle closest to stop line; |
| ; |
| for do |
| ; |
| conflict platoons conflict platoons; |
| for each conflict platoon in conflict platoons do |
| based on intersection geometry; |
| CalculateCollisionLoss ) using |
| Equation (4); |
| CalculateConfictProbability ) |
| using Equation (7); |
| ; |
| ); |
| Sort conflict platoons by CRD in ascending order; |
| for each conflict platoon do |
| ); |
| ); |
| TraCI.simulationStep (sim); |
| Compute average delay, fuel consumption, emissions per approach; |
| AnalyzeMetrics (vehicles); |
| return ; |
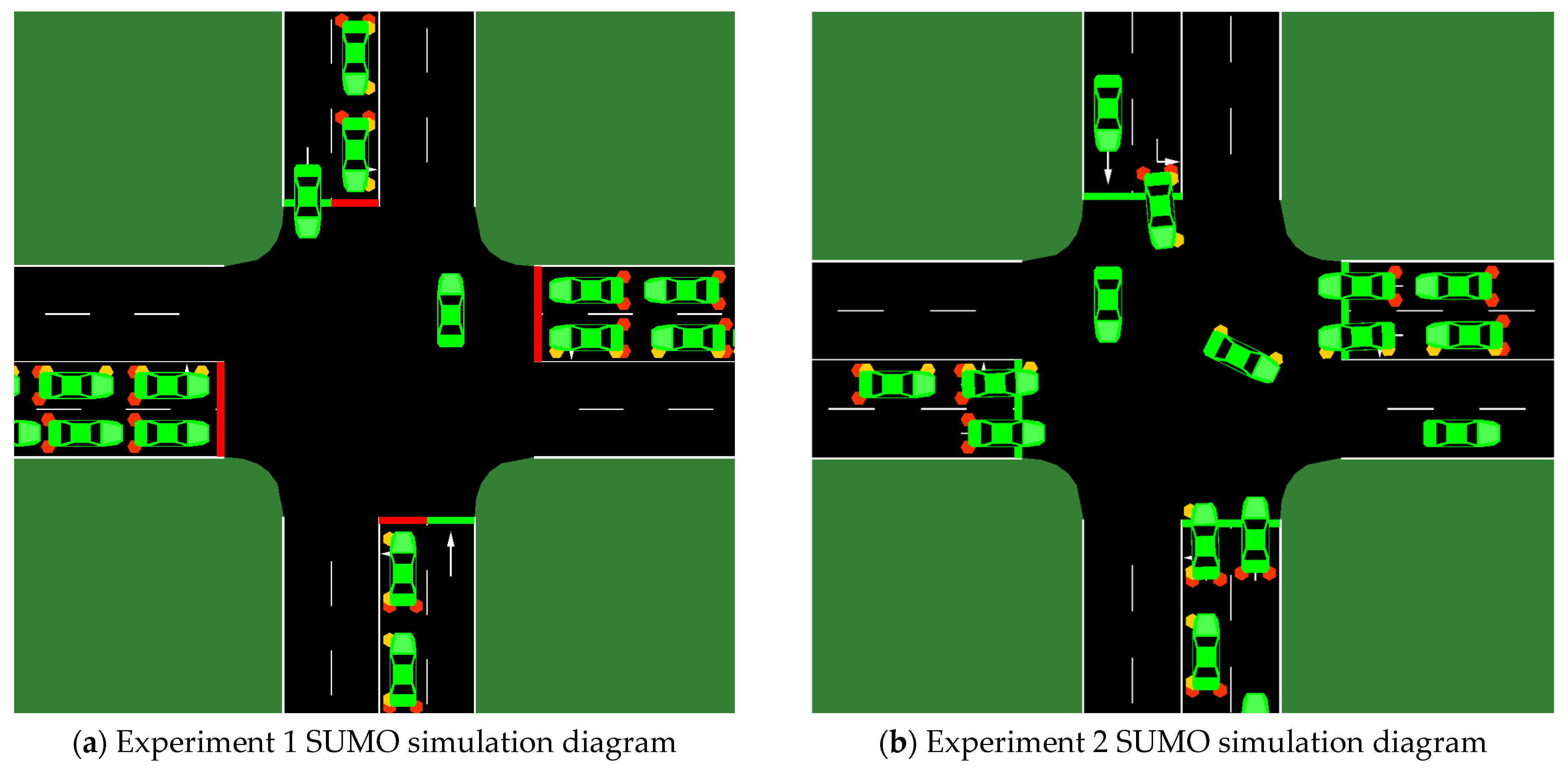
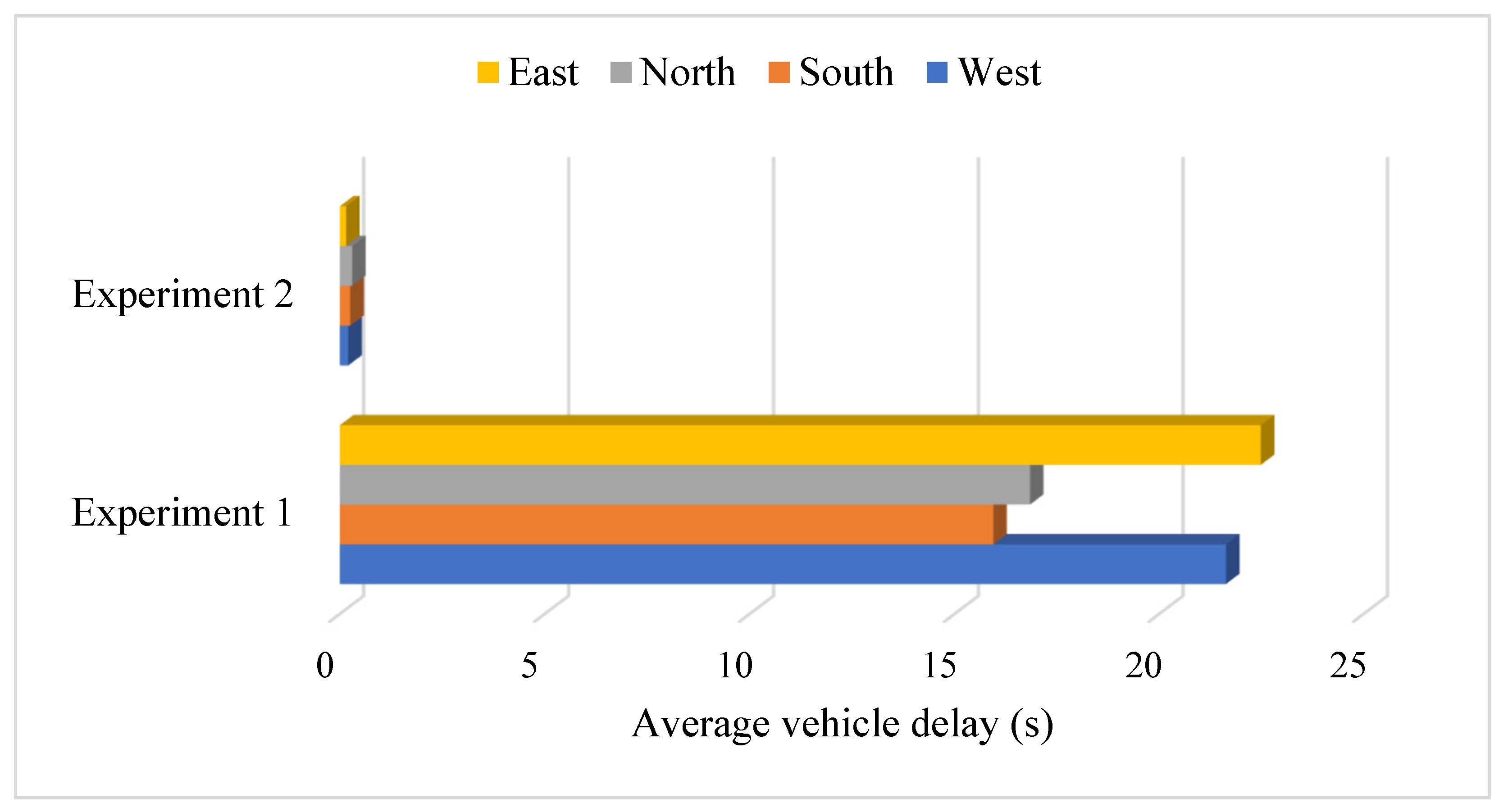
4.2. Simulation Results
4.3. Discussion and Analysis
5. Concluding Remarks
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sadaf, M.; Iqbal, Z.; Javed, A.R.; Saba, I.; Krichen, M.; Majeed, S.; Raza, A. Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects. Technologies 2023, 11, 117. [Google Scholar] [CrossRef]
- Pavel, M.I.; Tan, S.Y.; Abdullah, A. Vision-Based Autonomous Vehicle Systems Based on Deep Learning: A Systematic Literature Review. Appl. Sci. 2022, 12, 6831. [Google Scholar] [CrossRef]
- Chen, P.-C.; Liu, X.; Lin, C.-W.; Huang, C.; Zhu, Q. Mixed-Traffic Intersection Management Utilizing Connected and Autonomous Vehicles as Traffic Regulators. In Proceedings of the 2023 28th Asia and South Pacific Design Automation Conference (ASP-DAC), Tokyo, Japan, 16–19 January 2023. [Google Scholar] [CrossRef]
- Hou, G. Evaluating Efficiency and Safety of Mixed Traffic with Connected and Autonomous Vehicles in Adverse Weather. Sustainability 2023, 15, 3138. [Google Scholar] [CrossRef]
- Rahman, M.d.M.; Thill, J.-C. Impacts of connected and autonomous vehicles on urban transportation and environment: A comprehensive review. Sustain. Cities Soc. 2023, 96, 104649. [Google Scholar] [CrossRef]
- J3016_201806; Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Society of Automotive Engineers: Warrendale, PA, USA, 2018. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 25 May 2024).
- CnEVPost 2022. China’s Definition of Driving Automation Levels Comes Into Effect—AutoTech News. [online] AutoTech News. Available online: https://autotech.news/chinas-definition-of-driving-automation-levels-comes-into-effect/ (accessed on 25 May 2024).
- Heineke, K.; Kampshoff, P. Self-Driving Car Technology: When will the Robots Hit the Road? [online] McKinsey & Company. 2017. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/self-driving-car-technology-when-will-the-robots-hit-the-road (accessed on 26 May 2024).
- Qin, Y.; Wu, Y.; Guo, M. A Simulator Study on the Driving Impacts of Four Speed-Calming Measures at Unsignalized Intersections. Appl. Sci. 2024, 14, 3542. [Google Scholar] [CrossRef]
- Chen, S.; Hu, X.; Zhao, J.; Wang, R.; Qiao, M. A Review of Decision-Making and Planning for Autonomous Vehicles in Intersection Environments. World Electr. Veh. J. 2024, 15, 99. [Google Scholar] [CrossRef]
- Agafonov, A.A.; Yumaganov, A.S.; Myasnikov, V.V. Cooperative Control for Signalized Intersections in Intelligent Connected Vehicle Environments. Mathematics 2023, 11, 1540. [Google Scholar] [CrossRef]
- Xie, X.; Liao, W.; Aghajan, H.; Veelaert, P.; Philips, W. Detecting Road Intersections from GPS Traces Using Longest Common Subsequence Algorithm. ISPRS Int. J. Geo-Inf. 2016, 6, 1. [Google Scholar] [CrossRef]
- Chen, L.; Englund, C. Cooperative Intersection Management: A Survey. IEEE Trans. Intell. Transp. Syst. 2015, 17, 570–586. [Google Scholar] [CrossRef]
- Chen, W.; Liu, Y. Gap-based automated vehicular speed guidance towards eco-driving at an unsignalized intersection. Transp. B Transp. Dyn. 2019, 7, 147–168. [Google Scholar] [CrossRef]
- Zhou, F.; Li, X.; Ma, J. Parsimonious shooting heuristic for trajectory design of connected automated traffic part I: Theoretical analysis with generalized time geography. Transp. Res. Part B Methodol. 2017, 95, 394–420. [Google Scholar] [CrossRef]
- Ma, J.; Li, X.; Zhou, F.; Hu, J.; Park, B.B. Parsimonious shooting heuristic for trajectory design of connected automated traffic part II: Computational issues and optimization. Transp. Res. Part B Methodol. 2017, 95, 421–441. [Google Scholar] [CrossRef]
- He, Z.; Zheng, L.; Lu, L.; Guan, W. Erasing Lane Changes From Roads: A Design of Future Road Intersections. IEEE Trans. Intell. Veh. 2018, 3, 173–184. [Google Scholar] [CrossRef]
- Yu, C.; Feng, Y.; Liu, H.X.; Ma, W.; Yang, X. Integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections. Transp. Res. Part B Methodol. 2018, 112, 89–112. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, C.; Liu, H.X. Spatiotemporal intersection control in a connected and automated vehicle environment. Transp. Res. Part C Emerg. Technol. 2018, 89, 364–383. [Google Scholar] [CrossRef]
- Guo, Q.; Li, L.; Ban, X. Urban traffic signal control with connected and automated vehicles: A survey. Transp. Res. Part C Emerg. Technol. 2019, 101, 313–334. [Google Scholar] [CrossRef]
- Lu, Q.; Kim, K.-D. Autonomous and connected intersection crossing traffic management using discrete-time occupancies trajectory. Appl. Intell. 2019, 49, 1621–1635. [Google Scholar] [CrossRef]
- Miculescu, D.; Karaman, S. Polling-Systems-Based Autonomous Vehicle Coordination in Traffic Intersections with No Traffic Signals. IEEE Trans. Autom. Control 2019, 65, 680–694. [Google Scholar] [CrossRef]
- Choi, M.; Rubenecia, A.; Choi, H.H. Reservation-based traffic management for autonomous intersection crossing. Int. J. Distrib. Sens. Netw. 2019, 15, 155014771989595. [Google Scholar] [CrossRef]
- Yu, C.; Feng, Y.; Liu, H.X.; Ma, W.; Yang, X. Corridor level cooperative trajectory optimization with connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 105, 405–421. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, P.; Lu, G. Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks. Transp. Res. Part C Emerg. Technol. 2020, 111, 458–476. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhao, B.; Liu, M.; Yao, Z. A Two-Level Model for Traffic Signal Timing and Trajectories Planning of Multiple CAVs in a Random Environment. J. Adv. Transp. 2021, 2021, 9945398. [Google Scholar] [CrossRef]
- Liu, M.; Zhu, M.; Yao, M.; Li, P.; Tang, R.; Deng, H. Cooperative motion optimization based on risk degree under automatic driving environment. Sensors 2024, 24, 4275. [Google Scholar] [CrossRef]
- Cabri, G.; Montangero, M.; Muzzini, F.; Valente, P. Managing Human-driven and Autonomous Vehicles at Smart Intersections. In Proceedings of the 2020 IEEE International Conference on Human-Machine Systems (ICHMS), Rome, Italy, 7–9 September 2020. [Google Scholar] [CrossRef]
- Liang, X.; Guler, S.I.; Gayah, V.V. An equitable traffic signal control scheme at isolated signalized intersections using Connected Vehicle technology. Transp. Res. Part C Emerg. Technol. 2020, 110, 81–97. [Google Scholar] [CrossRef]
- Feng, Y.; Zheng, J.; Liu, H.X. Real-Time Detector-Free Adaptive Signal Control with Low Penetration of Connected Vehicles. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 35–44. [Google Scholar] [CrossRef]
- Islam, S.; Hajbabaie, A.; Aziz, H. A real-time network-level traffic signal control methodology with partial connected vehicle information. Transp. Res. Part C Emerg. Technol. 2020, 121, 102830. [Google Scholar] [CrossRef]
- Song, L.; Fan, W. Traffic Signal Control Under Mixed Traffic With Connected and Automated Vehicles: A Transfer-Based Deep Reinforcement Learning Approach. IEEE Access 2021, 9, 145228–145237. [Google Scholar] [CrossRef]
- Zhang, R.; Ishikawa, A.; Wang, W.; Striner, B.; Tonguz, O.K. Using Reinforcement Learning with Partial Vehicle Detection for Intelligent Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2020, 22, 404–415. [Google Scholar] [CrossRef]
- Wang, Q.; Yuan, Y.; Yang, X.; Huang, Z. Adaptive and multi-path progression signal control under connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2021, 124, 102965. [Google Scholar] [CrossRef]
- Moradi, H.; Sasaninejad, S.; Wittevrongel, S.; Walraevens, J. The contribution of connected vehicles to network traffic control: A hierarchical approach. Transp. Res. Part C Emerg. Technol. 2022, 139, 103644. [Google Scholar] [CrossRef]
- Ma, C.; Yu, C.; Yang, X. Trajectory planning for connected and automated vehicles at isolated signalized intersections under mixed traffic environment. Transp. Res. Part C Emerg. Technol. 2021, 130, 103309. [Google Scholar] [CrossRef]
- Jiang, S.; Pan, T.; Zhong, R.; Chen, C.; Li, X.; Wang, S. Coordination of Mixed Platoons and Eco-Driving Strategy for a Signal-Free Intersection. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6597–6613. [Google Scholar] [CrossRef]
- Yao, H.; Li, X. Decentralized control of connected automated vehicle trajectories in mixed traffic at an isolated signalized intersection. Transp. Res. Part C Emerg. Technol. 2020, 121, 102846. [Google Scholar] [CrossRef]
- Yu, M.; Long, J. An Eco-Driving Strategy for Partially Connected Automated Vehicles at a Signalized Intersection. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15780–15793. [Google Scholar] [CrossRef]
- Hajyan, M.; Nikoofard, A. Fuzzy control of autonomous vehicle at non-signalized intersection in mixed traffic flow. In Proceedings of the 2022 9th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS), Bam, Iran, 2–4 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, B.; Chen, Y.; Wu, Y.; Xiu, Y.; Fu, X.; Zhang, K. The Effects of Autonomous Vehicles on Traffic Efficiency and Energy Consumption. Systems 2023, 11, 347. [Google Scholar] [CrossRef]
- Tajalli, M.; Hajbabaie, A. Traffic Signal Timing and Trajectory Optimization in a Mixed Autonomy Traffic Stream. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6525–6538. [Google Scholar] [CrossRef]
- Guo, Y.; Ma, J. DRL-TP3: A learning and control framework for signalized intersections with mixed connected automated traffic. Transp. Res. Part C Emerg. Technol. 2021, 132, 103416. [Google Scholar] [CrossRef]
- Ghoul, T.; Sayed, T. Real-time signal-vehicle coupled control: An application of connected vehicle data to improve intersection safety. Accid. Anal. Prev. 2021, 162, 106389. [Google Scholar] [CrossRef]
- Niroumand, R.; Hajibabai, L.; Hajbabaie, A.; Tajalli, M. Effects of Autonomous Driving Behavior on Intersection Performance and Safety in the Presence of White Phase for Mixed-Autonomy Traffic Stream. Transp. Res. Rec. J. Transp. Res. Board 2022, 2676, 112–130. [Google Scholar] [CrossRef]
- Rey, D.; Levin, M.W. Blue phase: Optimal network traffic control for legacy and autonomous vehicles. Transp. Res. Part B Methodol. 2019, 130, 105–129. [Google Scholar] [CrossRef]
- Niroumand, R.; Tajalli, M.; Hajibabai, L.; Hajbabaie, A. Joint optimization of vehicle-group trajectory and signal timing: Introducing the white phase for mixed-autonomy traffic stream. Transp. Res. Part C Emerg. Technol. 2020, 116, 102659. [Google Scholar] [CrossRef]
- Jiang, X.; Shang, Q. A Dynamic CAV-Dedicated Lane Allocation Method With the Joint Optimization of Signal Timing Parameters and Smooth Trajectory in a Mixed Traffic Environment. IEEE Trans. Intell. Transp. Syst. 2022, 24, 6436–6449. [Google Scholar] [CrossRef]
- Dai, R.; Ding, C.; Wu, X.; Yu, B.; Lu, G. Coupling Control of Traffic Signal and Entry Lane at Isolated Intersections Under the Mixed-Autonomy Traffic Environment. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10628–10642. [Google Scholar] [CrossRef]
- Chen, X.; Lin, X.; He, F.; Li, M. Modeling and control of automated vehicle access on dedicated bus rapid transit lanes. Transp. Res. Part C Emerg. Technol. 2020, 120, 102795. [Google Scholar] [CrossRef]
- Brandl, O. V2X traffic management. e & i Elektrotechnik Informationstechnik 2016, 133, 353–355. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.-P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wiessner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Barth, M.J. A review on cooperative adaptive cruise control (CACC) systems: Architectures, controls, and applications. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2884–2891. [Google Scholar] [CrossRef]
- Webster, F.V. Traffic Signal Settings. Road Research Technical Paper No. 39; Her Majesty’s Stationery Office: London, UK, 1958. [Google Scholar]
- Mirheli, A.; Hajibabai, L.; Hajbabaie, A. Development of a signal-head-free intersection control logic in a fully connected and autonomous vehicle environment. Transp. Res. Part C Emerg. Technol. 2018, 92, 412–425. [Google Scholar] [CrossRef]
- Luo, Z.; Bi, Y.; Ye, Q.; Li, Y.; Wang, S. A novel machine vision-based collision risk warning method for unsignalized intersections on arterial roads. Electronics 2025, 14, 1098. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The maximum allowable headway between any two vehicles within a traffic flow to be considered as part of a single platoon. | |
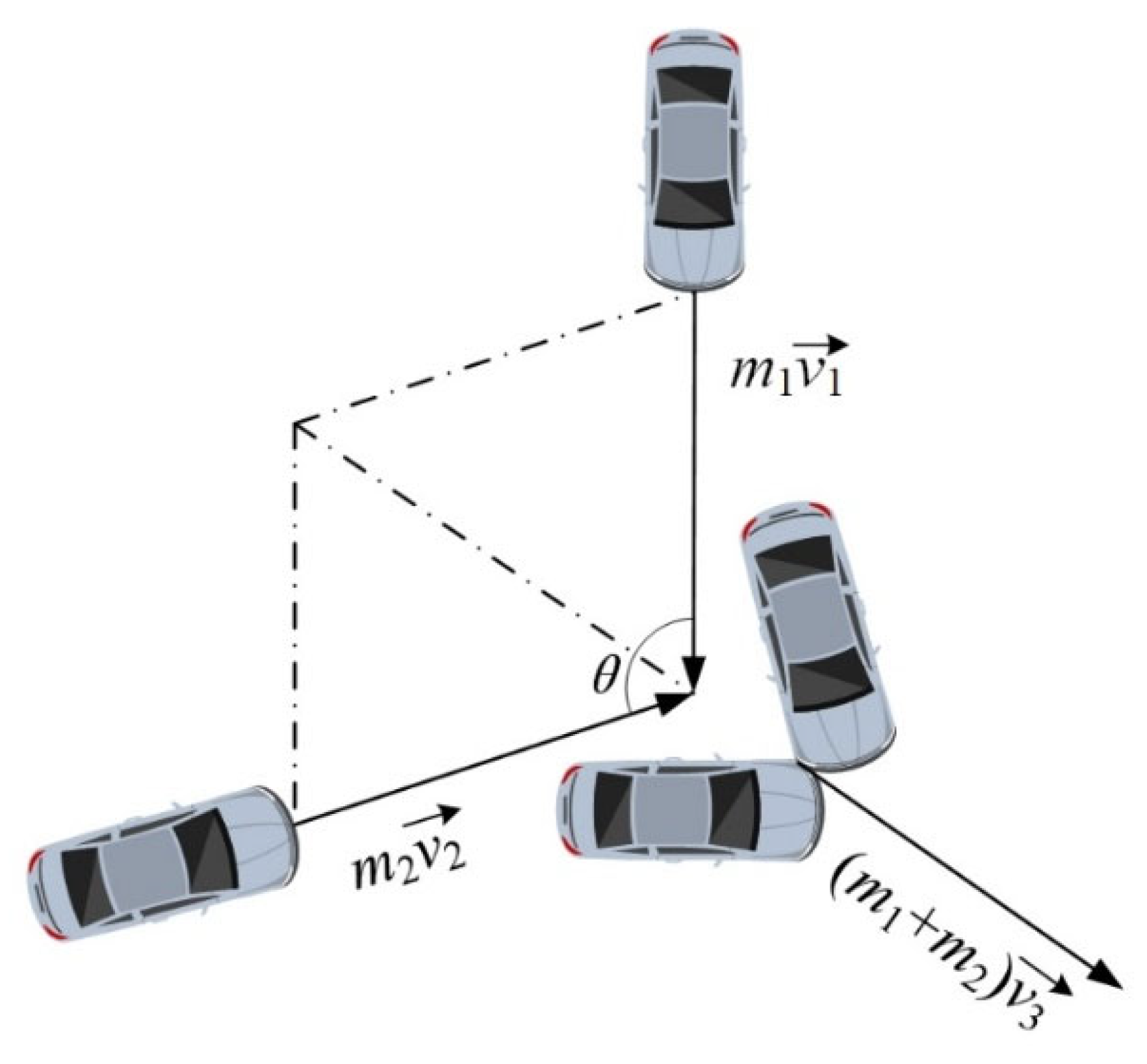
| The weights of Vehicle 1 and Vehicle 2 before collision. | |
| The combined weight of the two vehicles after collision. | |
| The velocity of Vehicle 1 and Vehicle 2 before collision. | |
| The angle of collision between two vehicles. | |
| The speeds of Vehicle 1 and Vehicle 2 before collision. | |
| The combined velocity of the two vehicles after collision. | |
| The combined speed of the two vehicles after collision. | |
| The energy loss in a collision represents the difference between the pre-collision kinetic energy and the post-collision kinetic energy of the system. | |
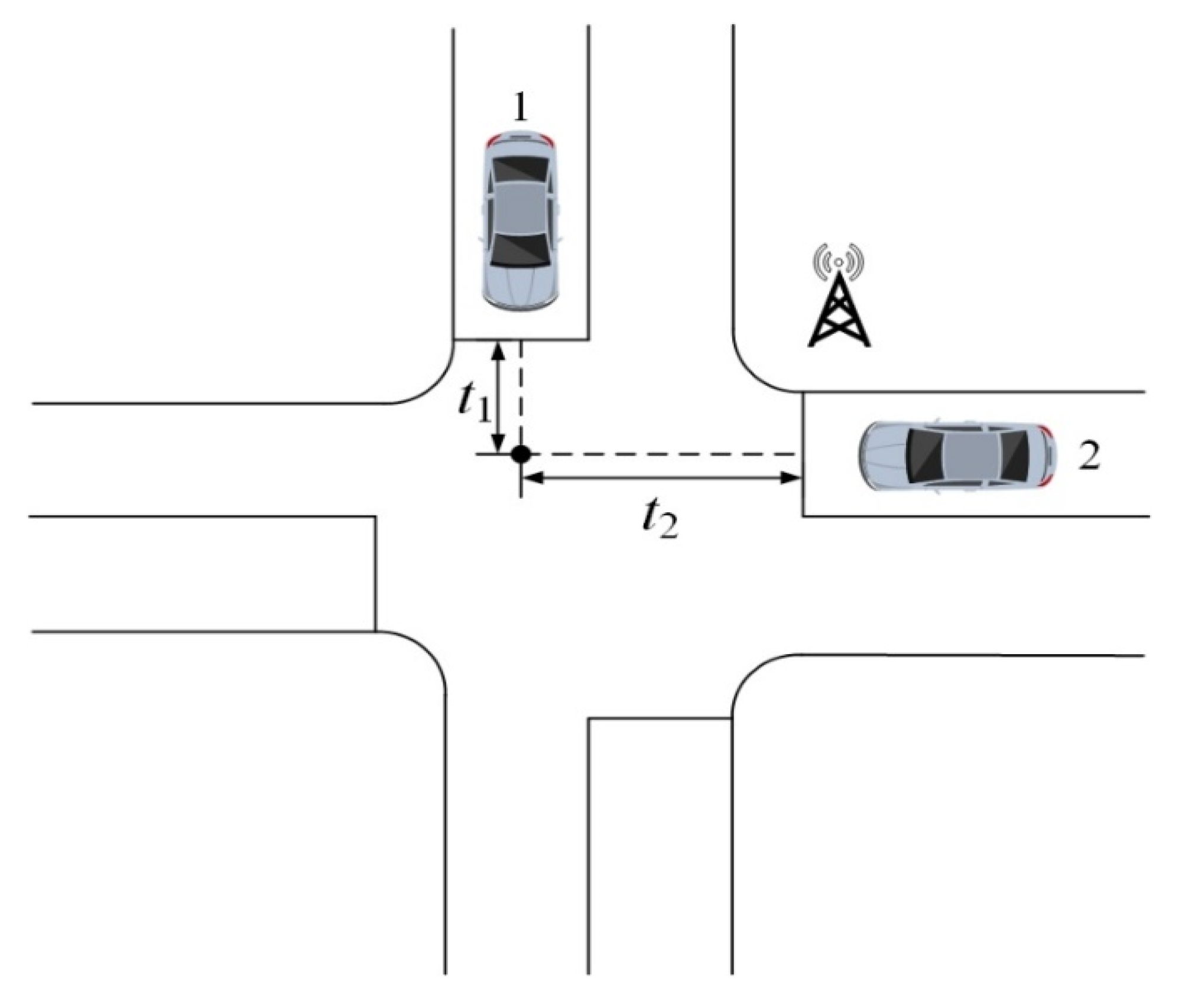
| The time for Vehicle 1 and Vehicle 2 to travel from the stop line to the conflict point. | |
| The time interval during which two vehicles narrowly avoid a collision is referred to as the critical acceptable gap. | |
| Lead vehicle conflict probability between priority vehicle platoon and conflict vehicle platoon. | |
| The probability of a conflict occurring between a conflict vehicle platoon consisting of n vehicles and a priority vehicle platoon. | |
| CRD | Crossing Risk Degree indicator. |
| Modeling Parameter | Parameter Description (Unit) | Parameter Value |
|---|---|---|
| ) | 5 | |
| ) | 2.5 | |
| ) | 13.89 | |
| ) | 2 | |
| ) | 2 | |
| ) | 4 | |
| ) | 1 | |
| ) | 92 | |
| ) | 25 | |
| ) | 15 | |
| ) | 1200 | |
| ) | 1800 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; Wang, Y.; Wang, H.; Li, C. Optimization of Autonomous Vehicle Safe Passage at Intersections Based on Crossing Risk Degree. Symmetry 2025, 17, 893. https://doi.org/10.3390/sym17060893
Shen J, Wang Y, Wang H, Li C. Optimization of Autonomous Vehicle Safe Passage at Intersections Based on Crossing Risk Degree. Symmetry. 2025; 17(6):893. https://doi.org/10.3390/sym17060893
Chicago/Turabian StyleShen, Jiajun, Yu Wang, Haoyu Wang, and Chunxiao Li. 2025. "Optimization of Autonomous Vehicle Safe Passage at Intersections Based on Crossing Risk Degree" Symmetry 17, no. 6: 893. https://doi.org/10.3390/sym17060893
APA StyleShen, J., Wang, Y., Wang, H., & Li, C. (2025). Optimization of Autonomous Vehicle Safe Passage at Intersections Based on Crossing Risk Degree. Symmetry, 17(6), 893. https://doi.org/10.3390/sym17060893