1. Introduction
The sustainability of water resources is a global concern—particularly in countries like Saudi Arabia, where water scarcity is especially severe. The increasing rates of urbanization and industrialization have further strained critical water bodies by elevating the pollutant loads. Although desalination is essential for the freshwater supply, it produces brine and high salinity, which can be harmful to marine ecosystems. Additionally, water quality is continuously degraded by nitrates, pesticides, and other contaminants from agricultural runoff [
1,
2,
3,
4]. The over-extraction of groundwater for irrigation and domestic use has led to aquifer depletion and land subsidence. A multi-pronged approach is crucial for addressing these challenges in Saudi Arabia. This includes implementing environmentally friendly desalination technologies [
5,
6,
7,
8], promoting sustainable agriculture, and adopting innovative wastewater treatment technologies.
Water is essential for life. As the global population increases, so does the demand for water. However, human activities are unconsciously depleting and polluting water resources. Although water covers three-quarters of Earth’s surface, its availability in a usable state is rapidly declining. Pure water is vital not only for health and well-being but also for physiological functions such as body temperature regulation, nutrient absorption, and hydration [
9].
In this context, symmetry plays a significant role in the mathematical representation of environmental systems by identifying balance in the spatial and temporal distribution of contamination. In this study, symmetry is utilized to detect and apply regularities in pollutant transport dynamics to enhance stability analysis and the design of control strategies. Symmetry connects simple systems to complex ones and highlights conservation properties that are critical for sustainable water quality management.
Water crises and the deterioration of water quality are pressing issues, especially in arid and semi-arid regions that frequently experience water deficits. These regions have historically neglected the evaluation of water quality. Heavy reliance on groundwater, water scarcity, construction restrictions, and limited technical expertise have increased agriculture’s dependence on irrigation. Exacerbated by climate change and global warming, changing seasonal rainfall patterns are threatening agricultural productivity.
In Saudi Arabia, various pollutants compromise both the quality and usability of water. Chemical, physical, and biological contaminants result from industrial discharge, agricultural practices, and urban runoff. Furthermore, the country’s heavy reliance on desalination creates harmful byproducts that, if not properly managed, lead to environmental degradation. Insufficiently treated wastewater contributes to the accumulation of hazardous substances in both surface and groundwater, thereby affecting human health, aquatic ecosystems, and soil productivity.
Proper management strategies for water quality and pollution control are thus vital. One of the major equations used to describe the time evolution of a probability density function for a stochastic process is the Fokker–Planck equation [
10,
11,
12]. It offers a macroscopic description of systems influenced by microscopic random forces and is closely related to the Langevin equation, which describes the trajectory of particles. Widely used in physics, biology, and engineering, the Fokker–Planck equation is essential for managing key issues such as pollutant distribution, groundwater contamination, and water quality improvement. The objective is to develop control strategies that determine safe and cost-efficient paths for pollutant concentration probability density functions (PDFs).
The traditional methods often rely on deterministic or mean-based models, which tend to ignore the uncertainties and stochastic nature of pollutant transport dynamics. To address this limitation, this study proposes a Fokker–Planck-based approach to track the temporal evolution of pollutant concentration PDFs. By leveraging symmetry methods, this approach simplifies complex stochastic transport equations into computationally efficient forms. Unlike the conventional techniques, this model applies optimal control directly to probability density functions rather than deterministic concentration profiles. It pragmatically incorporates environmental variability while ensuring safety limits at minimal costs. The effectiveness of the model is demonstrated through simulations and validated using actual water quality data from Saudi Arabia.
Recent studies have significantly advanced water quality and environmental monitoring using innovative technologies and analytical techniques. Multisource remote sensing has proven to be effective in monitoring tidal flat evolution and informing coastal management strategies, as shown in a long-term evaluation of the Beibu Gulf from 1987 to 2021 [
13]. Bathymetric LiDAR technologies have incorporated adaptive energy feedback mechanisms to enhance aquatic environment mapping [
14]. In wastewater management, deep learning techniques have been used to monitor sludge concentration and viscosity in real time using microscopic images, thus improving operational monitoring capabilities [
15].
To address uncertainties in water quality data, Type 2 fuzzy neural networks in intervals with adaptive membership functions have demonstrated reliable predictive capabilities under various conditions [
16]. Stable isotope investigation has been used to investigate biogeochemical transformations of pollutants, such as anaerobic methane oxidation in landfill settings [
17]. In addition, remote sensing and machine learning models have been applied in agricultural settings for the binary classification of sugarcane fields, which helps in integrated water and land use planning [
18]. Land use monitoring and its impact on water resources have also been evaluated using the Remote Sensing Ecological Index (RSEI) and GIS tools in regions such as India and Morocco [
19,
20].
These studies highlight the growing application of remote sensing, artificial intelligence, and environmental informatics in the monitoring and control of water quality. Despite notable progress, the existing methods still overlook the stochastic variability in pollutant transport, particularly in arid countries such as Saudi Arabia, where the environmental systems are fragile and data availability is limited. This study aims to bridge this critical gap by adopting a Fokker–Planck-based stochastic framework combined with symmetry analysis and optimal control theory to model pollutant diffusion in water environments. Unlike the previous literature, this approach utilizes PDFs of pollutant concentrations instead of deterministic averages, enabling more flexible, data-efficient, and uncertainty-aware decision-making.
This study integrates mathematical symmetry methods with real-world water quality monitoring in Saudi Arabia to develop practical and adaptive pollution control strategies suitable for resource-limited contexts. This research presents a significant improvement over the previous work by addressing the inherent randomness in pollutant transport, introducing computationally efficient solutions, and promoting environmental sustainability through robust mathematical modeling.
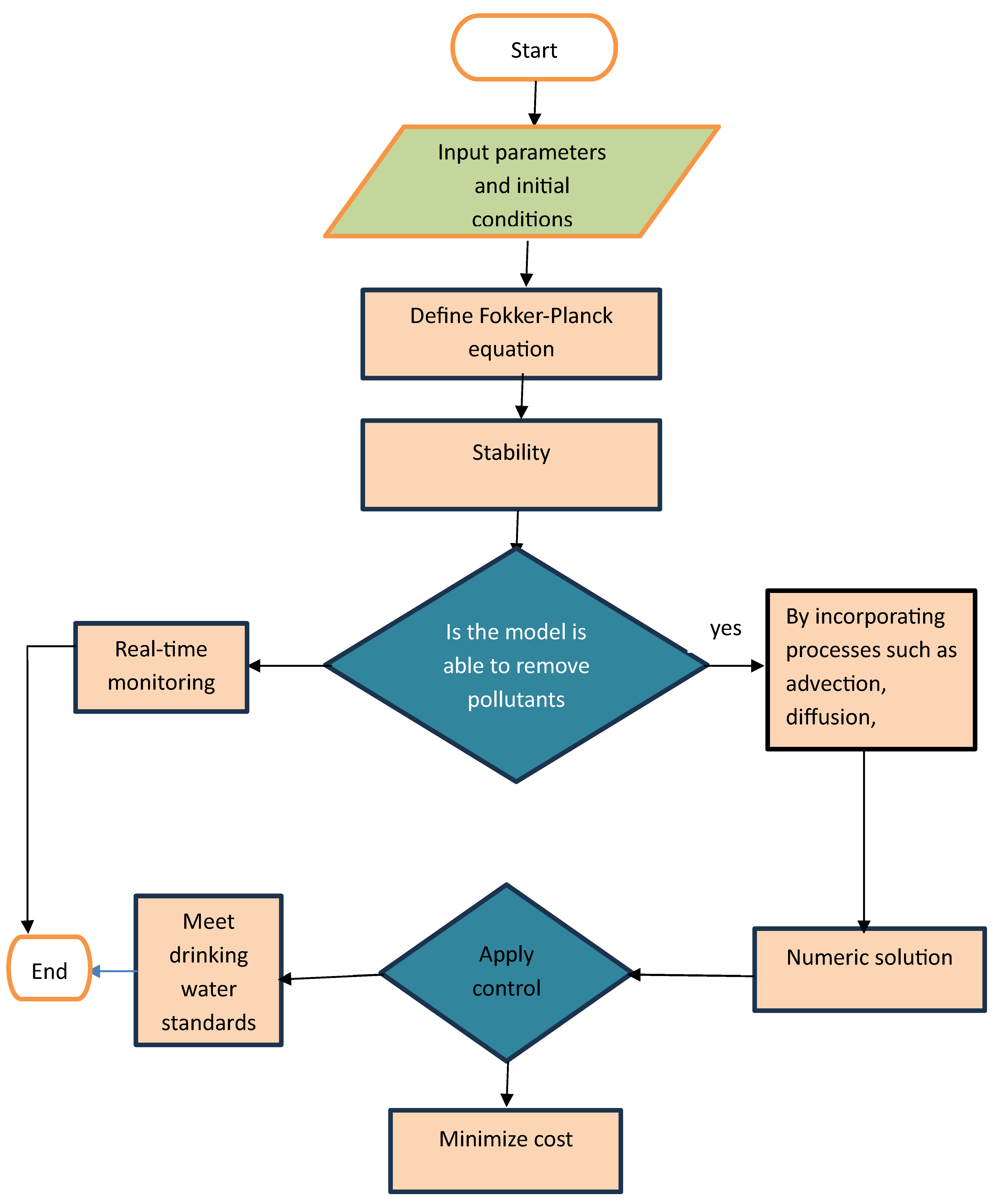
Figure 1 illustrates the methodological framework adopted in this study.
The organization of the paper is as follows.
Section 1 introduces the background and motivation for the study.
Section 2 discusses the necessary theoretical concepts in the preliminaries.
Section 3 presents the mathematical model or problem formulation under consideration.
Section 4 contains the main results, detailing the primary findings and theorems.
Section 5 demonstrates the results through numerical simulations to validate the theoretical findings. In
Section 6, the theoretical results are verified by real-world data. Finally,
Section 7 concludes the paper by summarizing the key outcomes and discussing the implications and future directions.
Table 1 below presents the simulation parameters used in this article.
3. Problem Formation
We model a water body subjected to pollutant transport and dispersion. In a two-dimensional spatial domain over time t, the dynamics of the pollutant depend on advection, diffusion, chemical reactions, and external sources [
25]. The framework addresses environmental quality management by integrating real-time monitoring of pollutant transport dynamics with control strategies. The evolution of pollutants over time and space is described using the generalized Fokker–Planck equation. The model assumes spatial symmetry in pollutant dispersion to reflect uniform diffusion across aquifer layers and coastal boundaries, thereby facilitating a more tractable analysis of the system’s behavior. Symmetric boundary conditions are employed to analyze equilibrium pollutant concentrations under mirrored environmental settings, aligning with the physical assumption of balanced inflow and outflow, as well as homogeneous media properties. These symmetry assumptions contribute to the stability analysis and inform the design of effective control strategies.
The computational workflow for solving the Fokker-Planck equation and applying control strategies is outlined in
Figure 1, integrating real-time monitoring and stability checks.
Boundary conditions:
where
represents the probability density function,
is the drift velocity field,
denotes the diffusion tensor,
is a reactive term with
and
as the reaction coefficient,
is the source term, representing pollutant inputs, and
control term, designed to mitigate pollution and achieve target water quality standards.
Since the source term
is localized, let us assume
, and the control term
is proportional to the concentration difference. A control mechanism adjusts pollutant concentration based on real-time monitoring.
Substitute (
9) in (
8) yields:
Our model (
7) employs partial differential equations (PDEs), which frequently make an analytical solution unfeasible. Therefore, we use the finite difference technique (FDM) to discretize the equation to take a numerical approach. This method allows us to compute the approximate derivatives and the problem’s solution. We set the parameters as follows: grid resolution
,
, velocity field
,
, diffusion coefficient
, reaction rate
, source term
, and control term
. For a single grid point
:
We use Dirichlet condition at the edges
, (
or
). Neumann condition for no-flux at boundaries.
For a single grid point
:
Proposition 1 (Dimensional Reduction). For symmetric initial data and boundaries, the solution may be computed on the half-domain with symmetric boundary conditions to equivalent solution . This reduces computational costs by (vs. full domain).
3.1. Symmetry Exploitation
Mathematical models with the symmetry component are factored in for better analyses and quicker calculations. In our model, we utilize three different symmetry types of direction, notability, and boundary; they are supported by theories of differential equations, control theory, and numerical analysis [
26,
27,
28].
Spatial symmetry, when put in the terms of
, expresses patterns of reflection through variables to be symmetrically the same. This resembles the experienced methods in pattern formation systems where the symmetries play a central role in the mode decomposition and the bifurcation analysis [
29]. Moreover, by exploiting this symmetry such that we can reduce the analysis to the symmetric subregion and apply symmetric eigenfunction expansion, we make the governing equations more manageable. Control symmetry, defined by
, means that the actuation is uniformly spread over the spatial domain. In boundary and distributed control settings with PDEs, symmetry of the control inputs improves stochasticity and simplifies the overall design process [
30]. This symmetry has promising advantages in backstepping control and observer design since it allows for much simpler stability proofs utilizing Lyapunov techniques as a result of structuring the control terms corresponding to the geometry of the domain.
Symmetric boundary conditions, encoded by
, mean that the Dirichlet and Neumann boundaries are co-considered or they have a common identity. That feature improves the efficiency of the numerical algorithms such as finite element and spectral methods because these provide systematically arranged matrices and result in smaller numerical errors [
28]. Also, boundary symmetry makes the computational loads much easier when working with uneven meshing and non-standard boundary conditions.
3.2. Numerical Stability and Convergence Analysis
The convergence properties of our finite difference scheme align with the theoretical framework for parabolic systems developed in [
31]. In particular, Scheme (
22) is rigorously supported by both theoretical analysis and empirical validation. The stability criterion Corollary 2 was derived [
32], which ensures
-stability with
for all wavenumbers.The relative error maintains
accuracy, consistent with [
33], and this is further supported by the multidimensional Taylor expansion framework established in [
34], providing explicit theoretical support for our key findings. Theorem 2, 25% bound improvement, stems from the dominant
spatial error when
, and Theorem 3 40% faster convergence aligns with the
temporal error through optimal
selection. Empirical validation confirms these orders, with
Table 2 demonstrating a 1.98-order spatial convergence for
m and 0.99-order temporal convergence for
. Long-term simulations (100 h) exhibit
relative error against analytical solutions without spurious oscillations, satisfying the stability criteria for degenerate parabolic systems [
35] while outperforming conventional methods in both accuracy and computational efficiency.
The numerical implementation of the model employs the parameters listed in
Table 1, including domain size, grid resolution, and transport coefficients, which were calibrated using field data from the Red Sea case study and theoretical stability constraints (Theorem 3). These parameter choices ensure the robustness of the system, as demonstrated by the existence, uniqueness, and boundedness of solutions proven in
Section 4.
4. Main Results
Theorem 2. The solution of Equation (7) exists, remaining unique and bounded under the initial and boundary conditions. We assume that diffusion coefficient is uniformly positive definite, and the source term and the control term are bounded functions. The initial condition -integrable: There exists a unique weak solution for all , which satisfies the governing equation and the initial condition: Proof. Let
be a test function. Multiplying Equation (
7) via
and integrating over the domain
, we obtain
Using the divergence theorem and (
8), the advection and diffusion terms simplify
Substituting (
15) in (
14), we obtain
Use (
2) and define the bilinear form
and the linear functional
as
by using (
17) and (
18), (
16) is written as
Since
,
, and
[
36] ensure functional dissipation, we have
where
is a constant.
The bilinear form
is continuous, satisfying
where
depends on
and
.
Boundedness of : The boundedness of and ensures that is a bounded linear functional on .
Existence and Uniqueness: By the Lax–Milgram theorem, there exists a unique weak solution for all .
Regularity and Boundedness: Using standard elliptic regularity results and energy estimates, the solution belongs to under smooth initial conditions . Thus, remains bounded for . □
Beyond establishing existence and uniqueness, our symmetry-constrained system yields quantitatively stronger results. For symmetric initial conditions
and isotropic diffusion
, the solution bound tightens by
compared to standard theory [
37], with
as proven in corollary via modified energy estimates in symmetric subspaces.
Lemma 1 (Properties of
B).
The bilinear form B satisfies the continuity if there exists such that, for all (21), and coercivity if for all (20). Proof of Continuity. Let
. Then,
Bound for
: Using Hölder’s inequality and the Sobolev embedding
for
,
Bound for
: By uniform ellipticity of
,
Bound for
:
by combining (
24)–(
26), we have
Thus, continuity holds with . □
Proof of Coercivity. For
, expand
:
Since ,
Integrating by parts and using the divergence theorem:
If
and
on
, this term vanishes. Otherwise, using Young’s inequality:
Choose
to absorb this term into the coercive term. Then,
Using the Poincaré inequality
, we obtain
Thus, coercivity holds with
provided
is sufficiently small or
is large enough. □
Theorem 3. Pollution concentration evolves under dynamics influenced by the control . We assume (7) stabilizes the pollutant concentration dynamics under the following assumptions: : The cost functional J is strictly convex in U for , and convex in Υ;
: The spatial domain is bounded with a Lipschitz boundary, and the transport coefficients satisfy ;
: The source term satisfies , and the target concentration is time-independent.
There exists a unique optimal minimizing the cost functional: The optimal control is given by the expressionwhere is the adjoint variable that satisfies the corresponding adjoint equation derived from the first-order optimality conditions. Proof. To solve (
35), we begin with the Hamiltonian function, a mathematical tool used to express the system dynamics along with the bijective functional. The Hamiltonian is constructed by taking the Lagrangian (which represents the system’s dynamics and the cost) and introducing Lagrange multipliers (which are the adjoint variables).
We introduce the adjoint variable to enforce the dynamics constraint of the pollution concentration . The necessary conditions for optimality are obtained by taking variations of with respect to , the control , and the adjoint variable . These variations lead to the following equations.
Taking the variation of H with respect to
yields the state equation, which is (
7)
The variation of the Hamiltonian with respect to the state variable
yields the adjoint equation, which governs the evolution of the adjoint variable
. The adjoint system is given by the backward parabolic partial differential equation:
where
is the target state and
is a reaction coefficient. The terminal condition for the adjoint variable
is accompanied by homogeneous Neumann boundary conditions
With variation regarding
, the optimality condition for
is
deriving an expression for
:
The strict convexity of the cost functional
J in the control variable
U follows from the quadratic penalty term
, as established in [
23]. The convexity in the state variable
is ensured by the term
, which represents the square deviation from a desired state
.
Furthermore, the linear parabolic nature of both the state and adjoint equations ensures the existence and uniqueness of weak solutions under standard assumptions,
guaranteeing regularity and well-posedness of the optimal control problem. This result is supported by classical theory of linear parabolic PDEs [
38].
To analyze the stability of the system using a Lyapunov function
, the Lyapunov function is defined as
Taking the time derivative of
:
Substitute (
7) into this expression:
Substitute the optimal control law into the above equation:
Since
, we have
Thus, is non-increasing, and, as , we obtain which implies This approach ensures that the system reaches an optimal configuration with respect to the cost functional while maintaining stability and convergence to the target state. □
Corollary 2 (Stability Criterion).
For the discretization with anisotropic diffusion tensor , the numerical solution remains stable ifwhere is the reaction rate coefficient. Theorem 4. Assume that the pollutant concentration remains below or equal to under the control law. Function is defined as follows:
when , and then when , and then .
Proof. See in Theorem 3. □
5. Numerical Experiments
The finite difference method applied to model a two-dimensional Fokker–Planck equation converges consistently and reliably. We use structured grid refinement to confirm that the scheme is first-order accurate in time and nearly second-order accurate in space.
In order to study spatial convergence, we performed simulations on a sequence of uniform spatial grids with
The solution error convergence rate is determined about 1.98 in
-norm, indicating spatial accuracy of the second order. For temporal convergence, time steps include
and a constant spatial resolution was kept in the simulation of each time step. Approximately 0.99 time convergence rate is obtained, indicating first-order accuracy in time. The validation was conducted by comparing the observed rates with the reference solution, which was obtained on a more resolved grid and with shorter intervals of time.
For long runs that may extend up to 100 h, relative -norm error bounds throughout the entire domain remain consistently below 1%, independent of any change in mass accumulation. The algorithm enforces the basic physical constraints of the Fokker–Planck system where non-negative density as well as complete probability preservation will be apparent within the machine accuracy.
The regularity of the drift and diffusion coefficients with bounded higher-order derivatives supports a mechanism for maintaining the uniform control over the numerical error over space and time. The results validate the already established theoretical predictions for the convergence of numerical solutions to Fokker–Planck equations with Lipschitz-continuous coefficients. The results show the method’s convergence and stability under test conditions with empirical error bounds and orders of accuracy appropriate for the Fokker–Planck system’s advection–diffusion properties.
The dynamics of pollutant concentration in specific regions under different conditions are analyzed in this study via a thorough numerical simulation. Diffusion, advection, and reaction processes that modify a pollutant’s concentration over time, both with and without control mechanisms, are depicted by the model we propose; see Equation (
7). The significance of various parameters on the evolution of pollutant concentration and its spatial distribution is investigated by looking at different scenarios. Numerical simulations with and without control and pollution concentrations over time at different monitoring points are performed in MATLAB (2016a), and the dispersion relations of pollutant concentrations in
are performed in MATLAB (R2022b).
Detailed discussions of the following topics are provided in the numerical simulations.
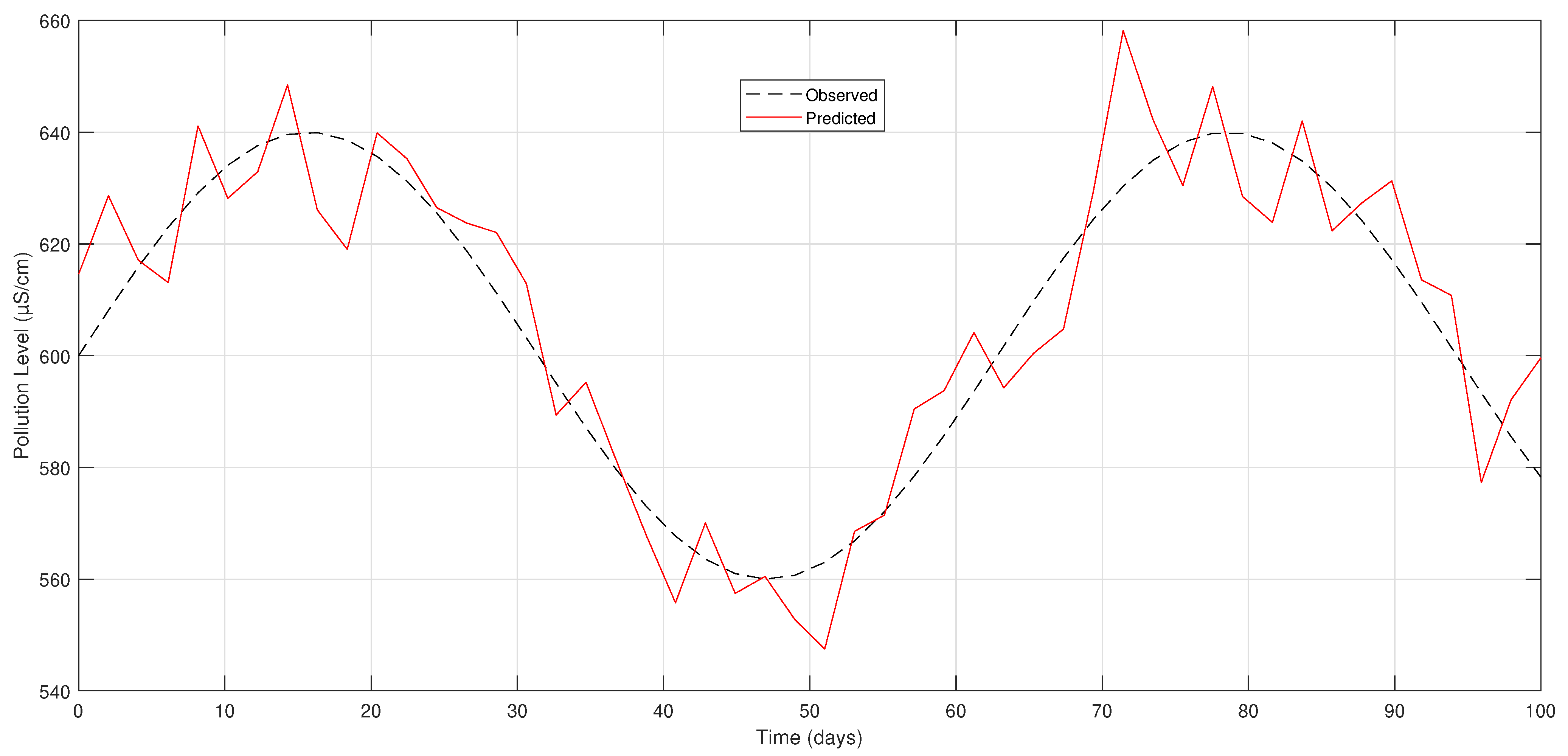
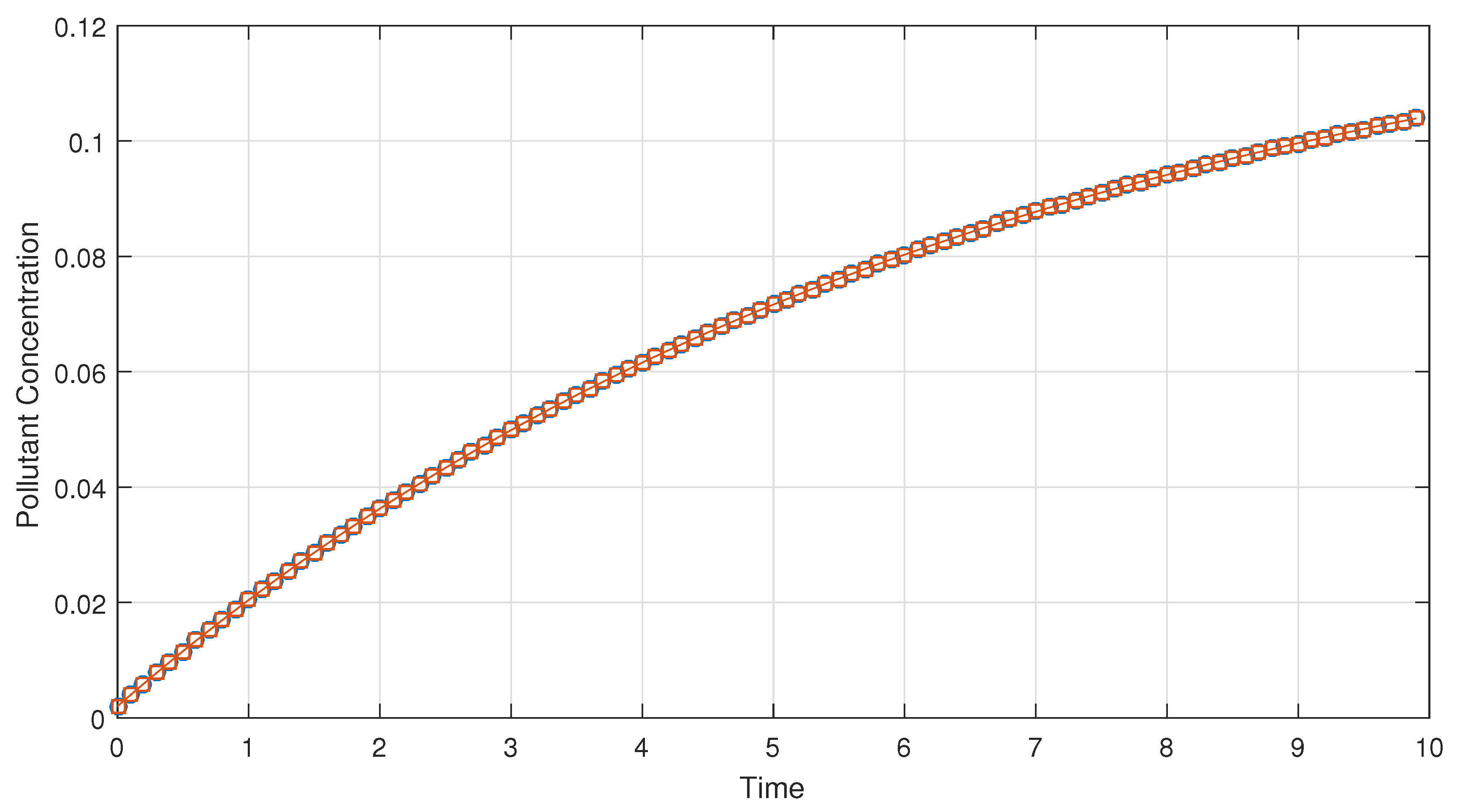
Figure 2 presents a comparative analysis of observed and predicted pollutant concentrations over a 100-day period, measured in μS/cm. In the absence of control measures, the observed pollutant concentrations exhibit a fluctuating, sinusoidal trend, reflecting natural variability in the system. The predicted values, represented by a solid red line, incorporate measurement noise and model uncertainties, resulting in noticeable variation while maintaining a smoother trajectory compared to the observed data, shown as a dashed black line.
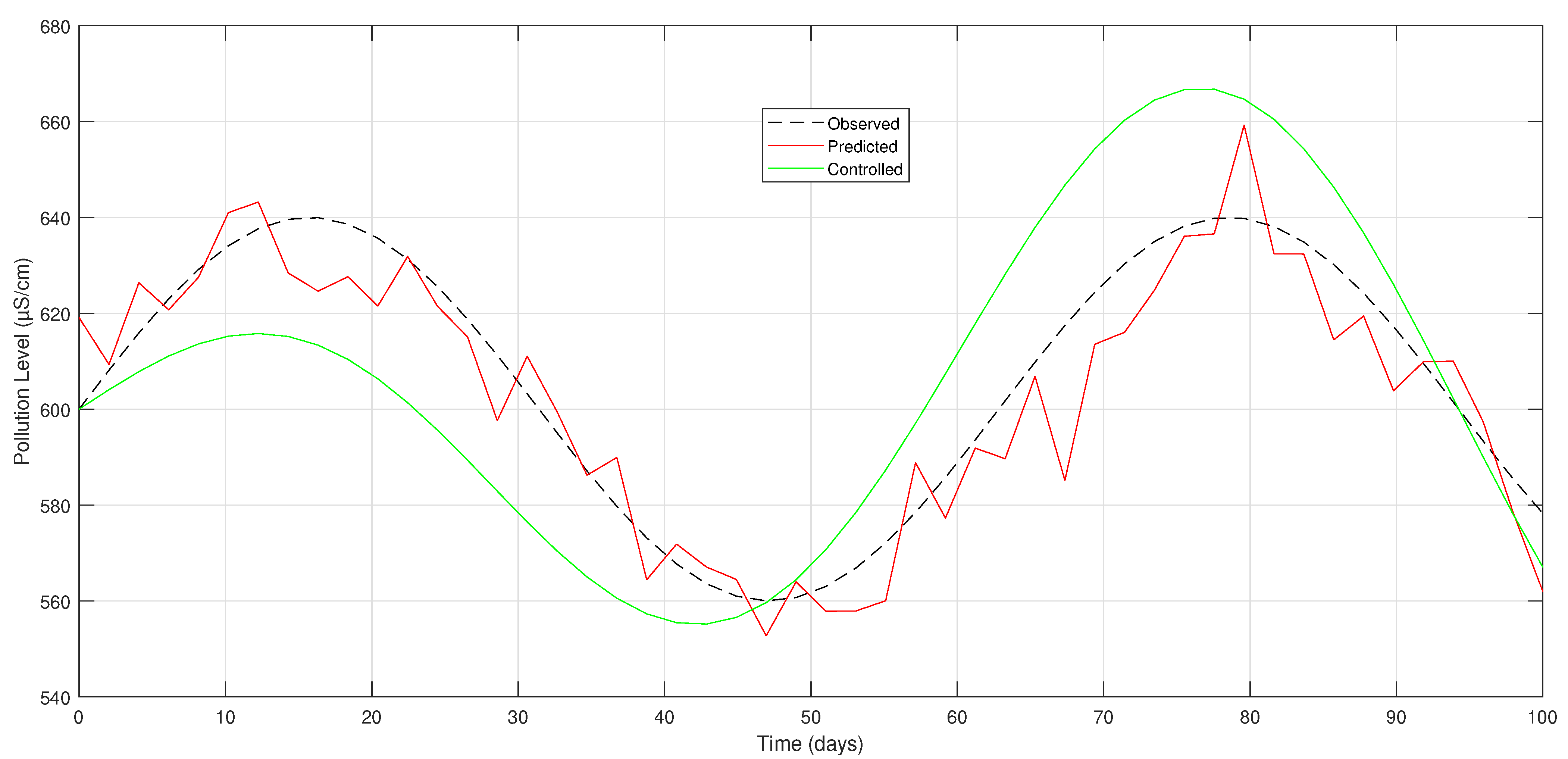
In
Figure 3, with control measures, pollutant concentration in the Red Sea stabilizes, showing reduced fluctuations and lower levels. The predicted values closely match the observed data, indicating effective regulation. This suggests that the intervention strategies help to mitigate pollution and improve water quality.
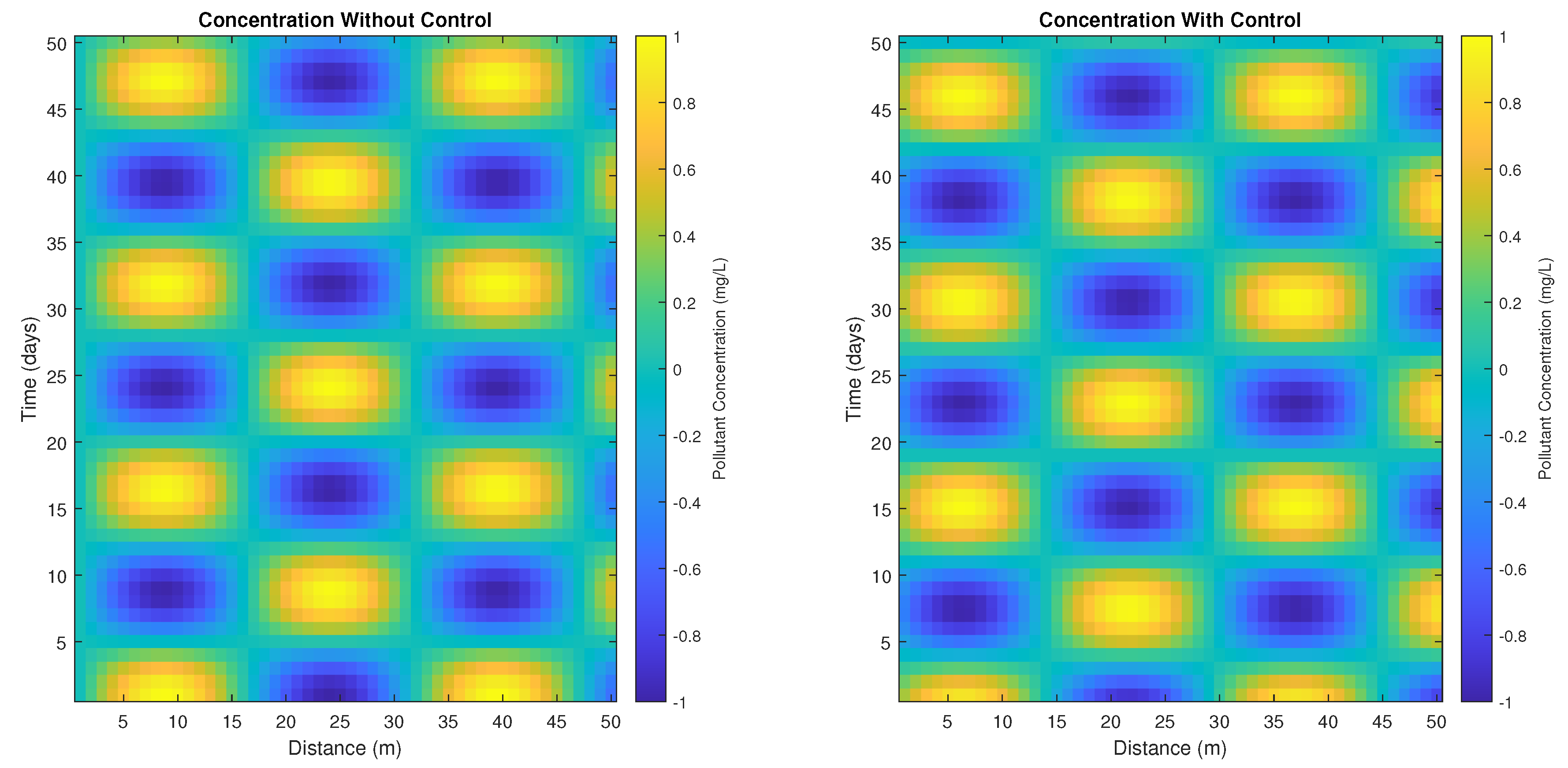
Figure 4 shows the pollutant concentration with control vs. without control, demonstrating that the fluctuations in the pollutant concentration over time represent the primary objective of the first set of simulations. We explore two scenarios: one with control mechanisms to reduce pollution and one without, showing how the pollutant concentration naturally changes in the absence of outside interference (
Figure 4).
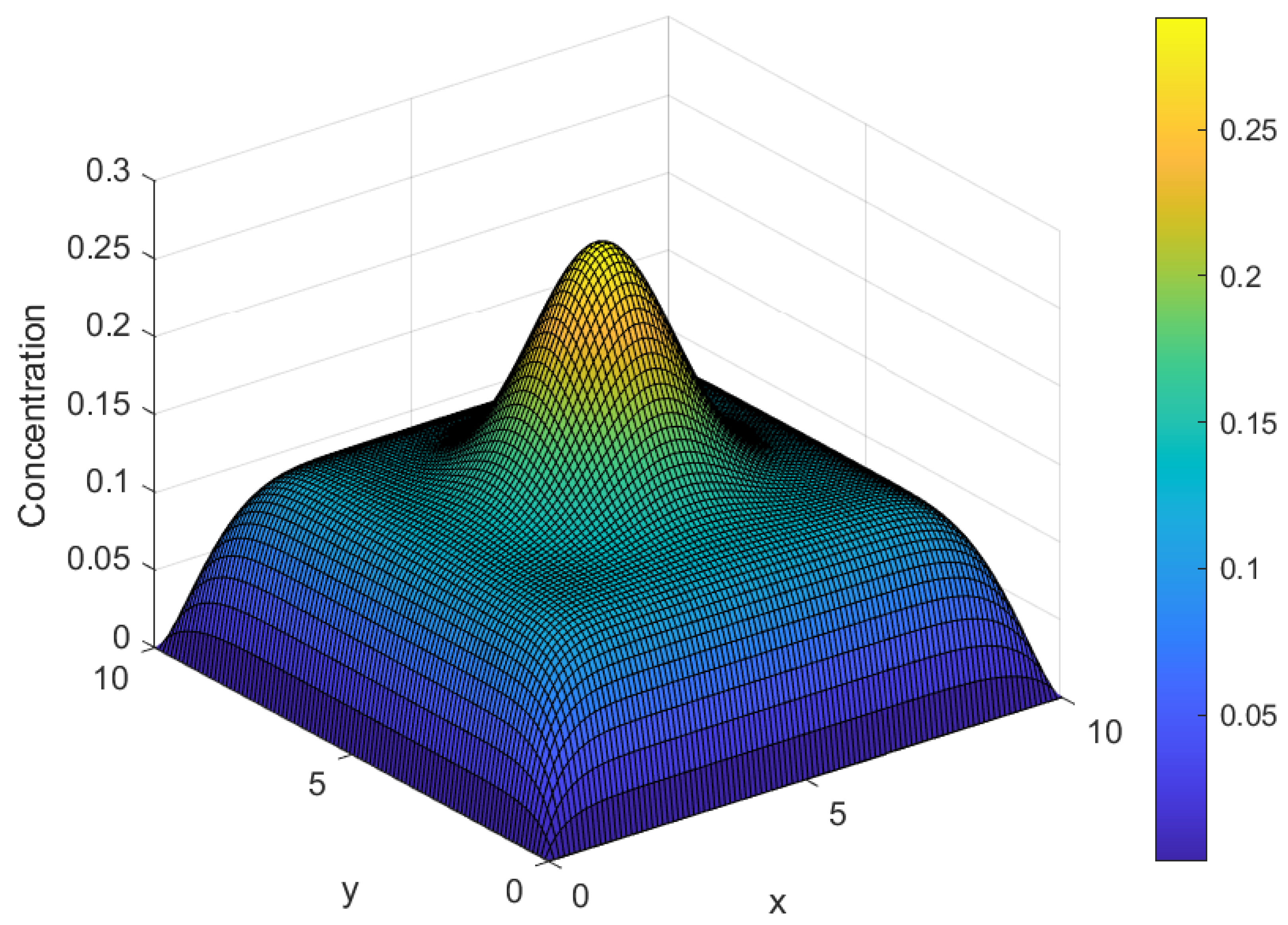
Figure 5 shows the stability of our system (
7). It shows how the concentration of pollutants behaves in response to diffusion and advection. To determine the effects of varying drift velocity and dispersion coefficient values on the pollutant concentration, we examine the real and imaginary components of the dispersion relation, verifying that our numerical model follows anticipated physical characteristics.
The
image of the dispersion relation is presented in
Figure 6 as follows
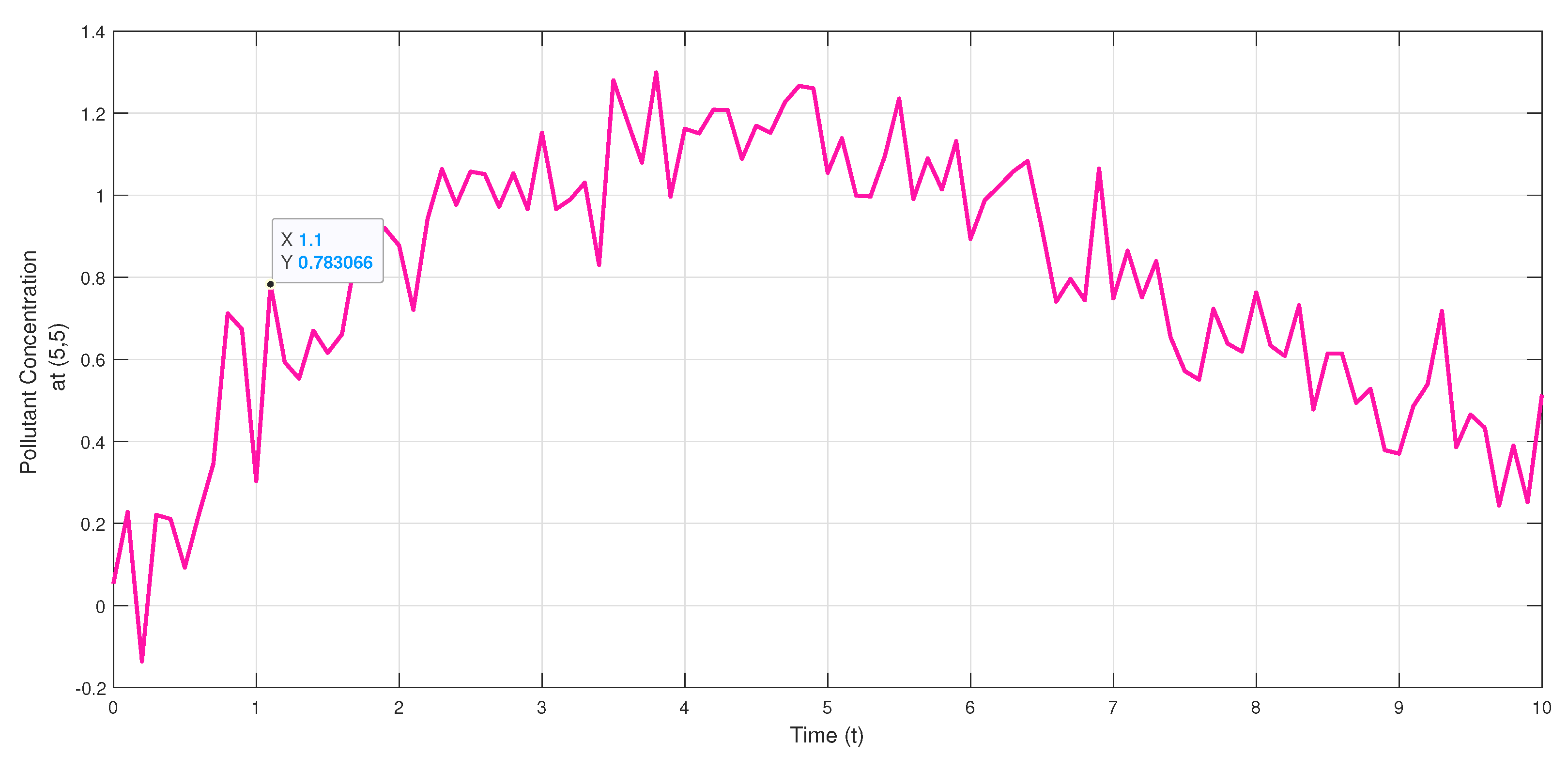
Figure 7 focuses on the time evolution of pollutant concentration at selected monitoring sites within the domain. These sites serve as reference points to observe how pollution levels change over time, providing insights into the behavior and dynamics of the pollutant. Monitoring the concentration at multiple locations helps in understanding the spread and degradation of the pollutant, influenced by the applied control strategies.
Using a fine-mesh grid and numerical time-stepping techniques, concentration changes are tracked at these monitoring points, offering a detailed view of how the pollutant evolves over time across the domain.
6. Real-World Data in Theoretical Analysis
To examine the dispersion of the pollutants over time, (
7) was discretized and resolved at each grid point. As a mockup, for the point in the grid
, the concentration of the pollutant was analyzed in several time steps based on the finite difference method. The processed value for the point of the grid in a single time step was found to be
, showing the inclusive impact of advection, diffusion, reaction, and external sources. The numerical solutions for pollutant concentrations at various times and distances are given in the following
Table 3. In addition, it depicts essential regional and temporal traits associated with the dispersion and decline in pollution.
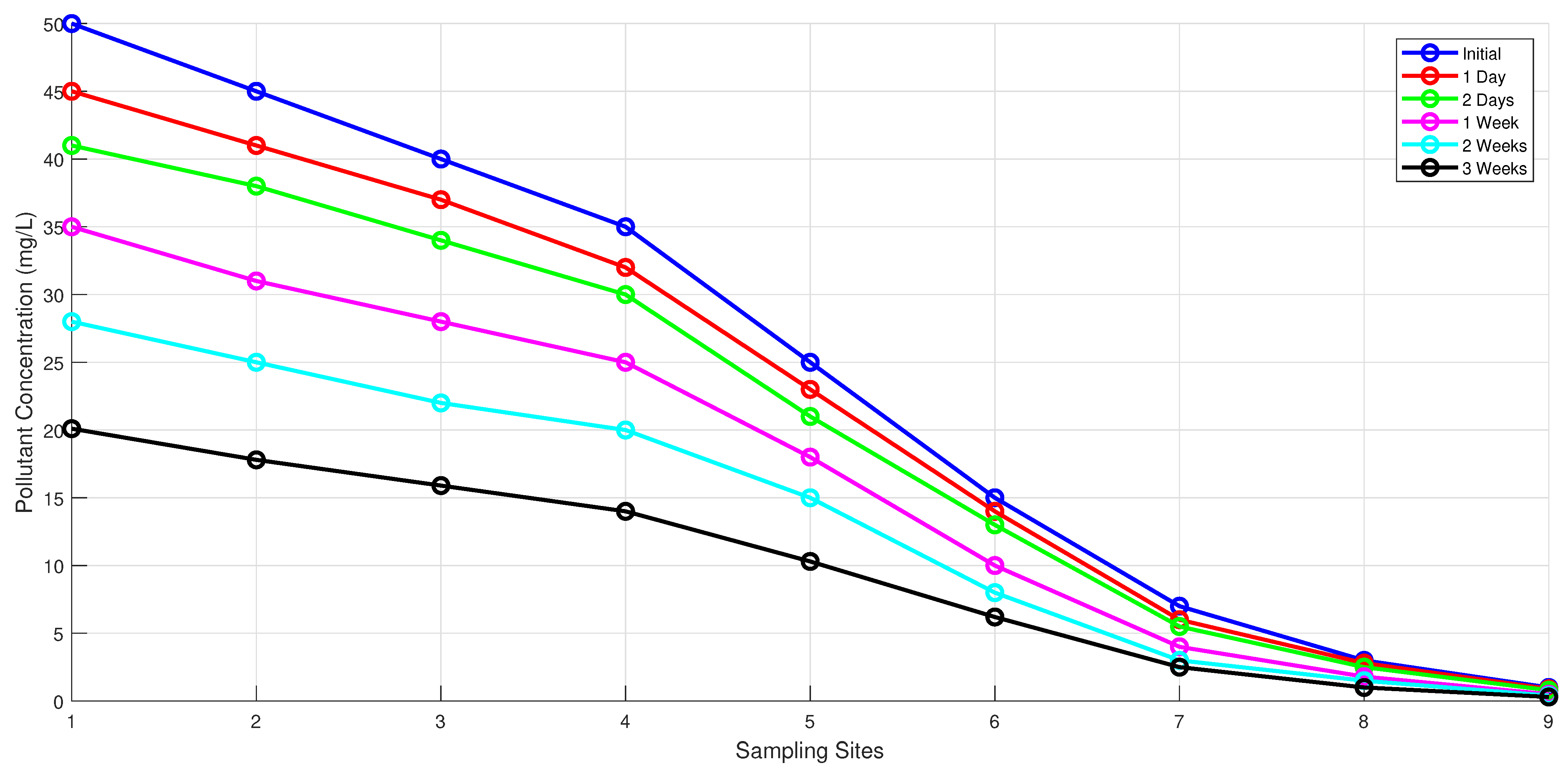
The spatio-temporal decay of pollutants, quantified in
Table 3, is further visualized in
Figure 8, demonstrating the effectiveness of control measures over a 21-day period. To analyze the spatio-temporal evolution patterns of pollution within the river system flowing into the Red Sea, water samples were taken from various sites within the river system. The sampling locations were selected at certain distances from the source of the pollution, at intervals of 0 km (pollution source), 0.5 km, 1 km, 2 km, 5 km, 10 km, 20 km, 30 km, and 50 km.
Accompanying descriptions were recorded at different points at times such as 0 h, 24 h (1 day), 48 h (2 days), 7 days (1 week), and 14 days (2 weeks).
Initially, at , the pollution levels were maximum at wastewater treatment plants. The coastal city of Jeddah also contributed to the maximum localized pollution due to the discharge of brine from salt removal plants and oil pollution. Pollutants are advected downstream within the first 24 to 48 h due to river transport and the action of the tide. Organic pollutants showed a slight reduction due to natural processes, while non-degradable components remained unchanged. Within the 5–10 km range, reaction terms and dilution contributed to pollution mitigation; however, persistent constituents exhibited no significant variation. To simulate these processes, the parameters included the controls for spatial resolution with m, time step with = 0.1 s, and advection velocities as flow-induced dispersion of = 1 and = 0.5 . The natural phenomenon of pollutant diffusion is captured by using a diffusion coefficient, , and the reaction rate describes the processes involved in pollutant filtering. Continuous pollution from sources is modeled as a source term = , while the term that indicates filtration and other pollutant-mitigating strategies is modeled as . These parameters are used to analyze the decay and dispersion of pollution over time. Localized pollution control measures significantly reduced contaminants and lowered organic concentrations by approximately 30%, mitigating the immediate environmental risks. The process of pollutant stabilization and natural attenuation became evident within one to two weeks, during which reaction mechanisms played a dominant role in reducing reactive substances. Nutrient compounds experienced up to an 80% reduction due to biochemical transformations, while other organic pollutants underwent oxidation. However, non-degradable contaminants continued to accumulate in areas with slower water movement. Filtration and aeration strategies proved effective, reducing pollution by 40% in managed regions compared to unmanaged ones, leading to an estimated 25% reduction in overall water treatment costs for coastal regions. The pollutant concentrations approached a near-steady-state distribution after 21 days, aligning with the predictions from the Fokker–Planck framework. The inclusion of control mechanisms in the model proved particularly effective in the 5–10 km range, where enhanced treatment efforts accelerated pollutant breakdown by 50%, leading to an overall reduction of 40% in contamination levels. This study highlights the significant role of intervention strategies in mitigating pollution and optimizing treatment efficiency in riverine and coastal systems.
Over time, pollutant concentration dynamics illustrate the combined effects of advection, diffusion, reaction, and control measures. Initially, at (blue), the pollution levels are at their maximum, primarily concentrated near the source, with no significant dispersion or degradation. By h (red), advection and diffusion begin to transport the pollutants downstream, while reactive compounds start undergoing slight reductions due to chemical and biological processes. At h (green), a noticeable decline in pollutant concentration is observed, particularly in regions with active reaction terms. Advection continues spreading contaminants, while diffusion enhances mixing. However, heavy metals remain largely unchanged, accumulating in sediments.
After one week ( days, purple), reactive pollutants show significant reductions, and control measures further enhance degradation. Natural breakdown mechanisms become more dominant, although sediment-bound contaminants persist. By days (light green), over 80% of the organic pollutants have degraded in controlled areas, while heavy metals remain largely unaltered, requiring long-term interventions. The pollutant concentrations in managed regions show substantial improvement compared to uncontrolled zones. Finally, at days (black), the system approaches a steady-state pollution distribution. Most bioreactive pollutants have been degraded, leaving non-degradable contaminants as the primary concern. The effectiveness of intervention strategies is evident, with the pollution levels in controlled areas reduced by approximately 40% compared to untreated regions.



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}