
Novel Results on Global Asymptotic Stability of Time-Delayed Complex Valued Bidirectional Associative Memory Neural Networks
 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- This study investigates the global asymptotic stability of complex-valued BAM neural networks containing multiple time-varying delays, commonly encountered in real-world signal processing and neurodynamic systems;
- The primary aim is to establish a new set of sufficient criteria that guarantee both the existence and uniqueness of equilibrium points while also confirming the global asymptotic stability of the proposed hybrid complex-valued BAM neural network framework;
- To achieve this, we develop a well-constructed Lyapunov–Krasovskii functional, taking into account the delay-dependent properties and hybrid structure of the system;
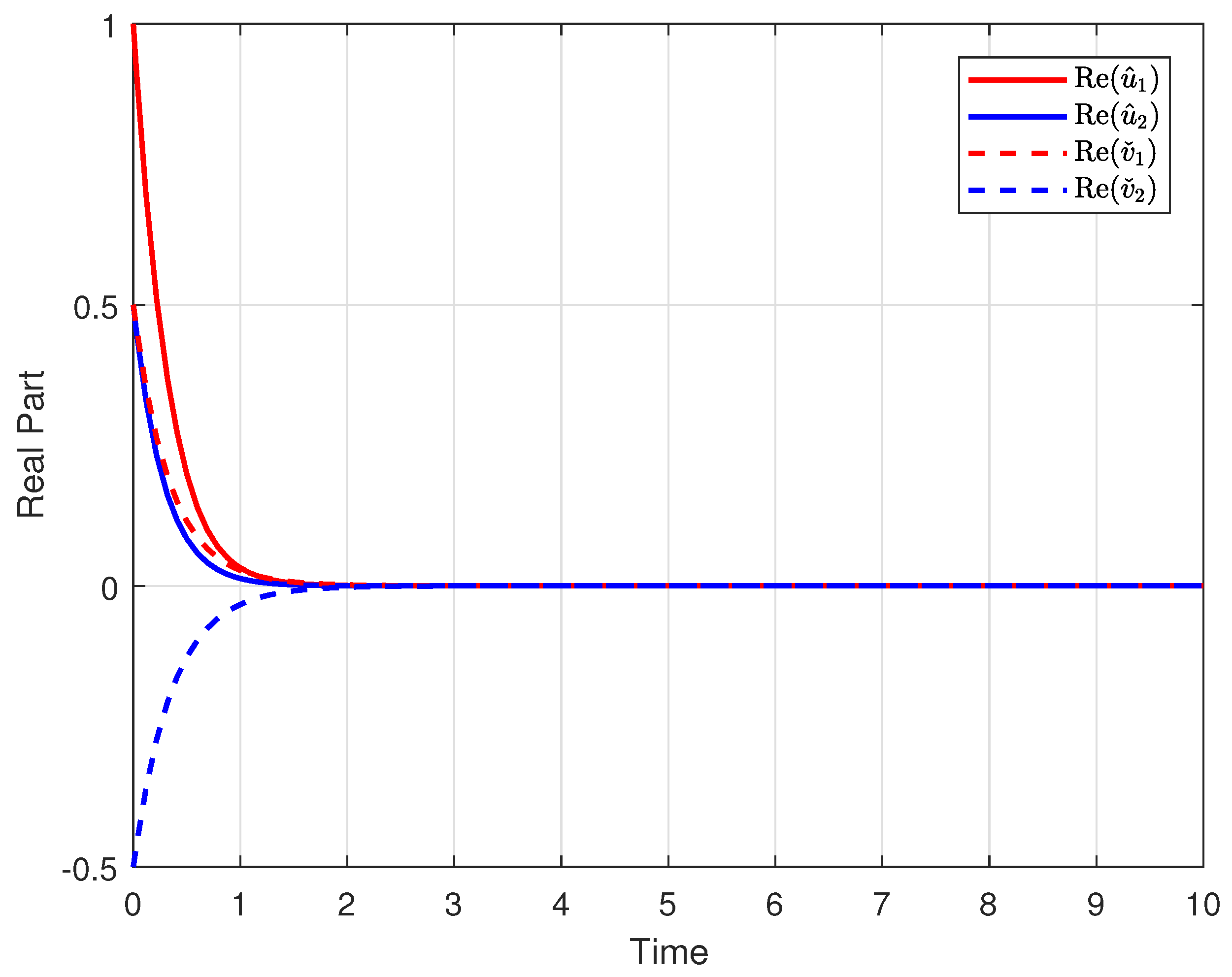
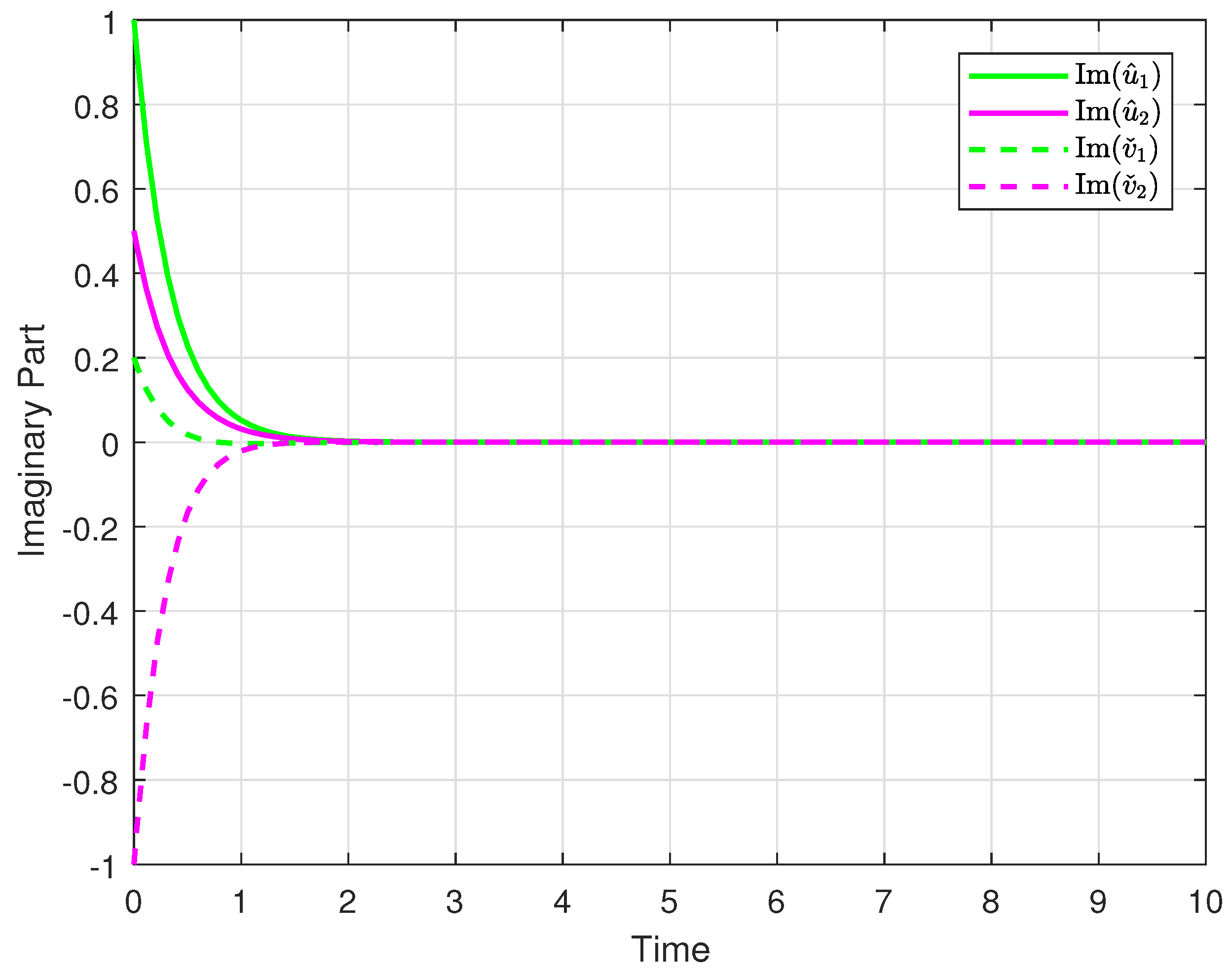
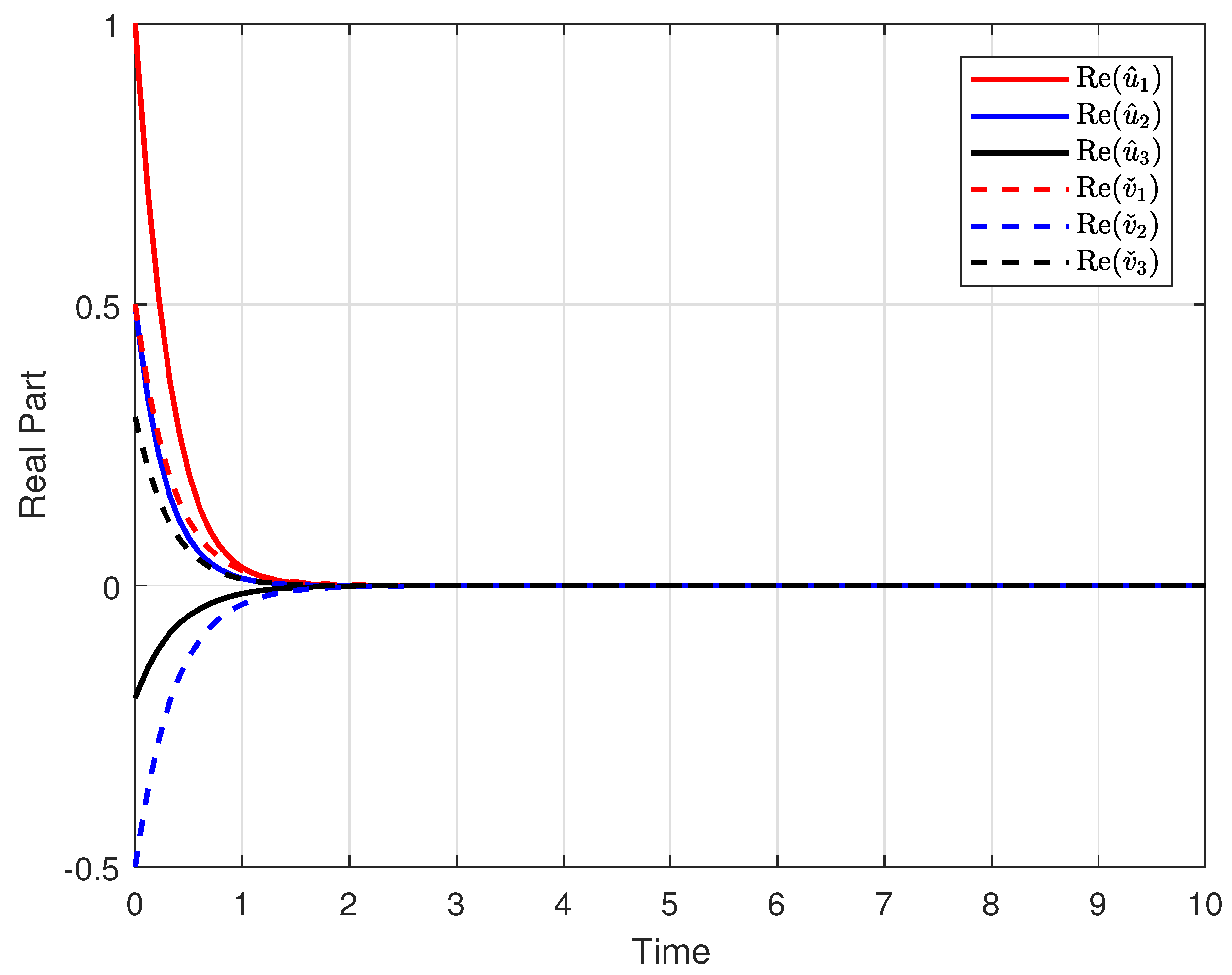
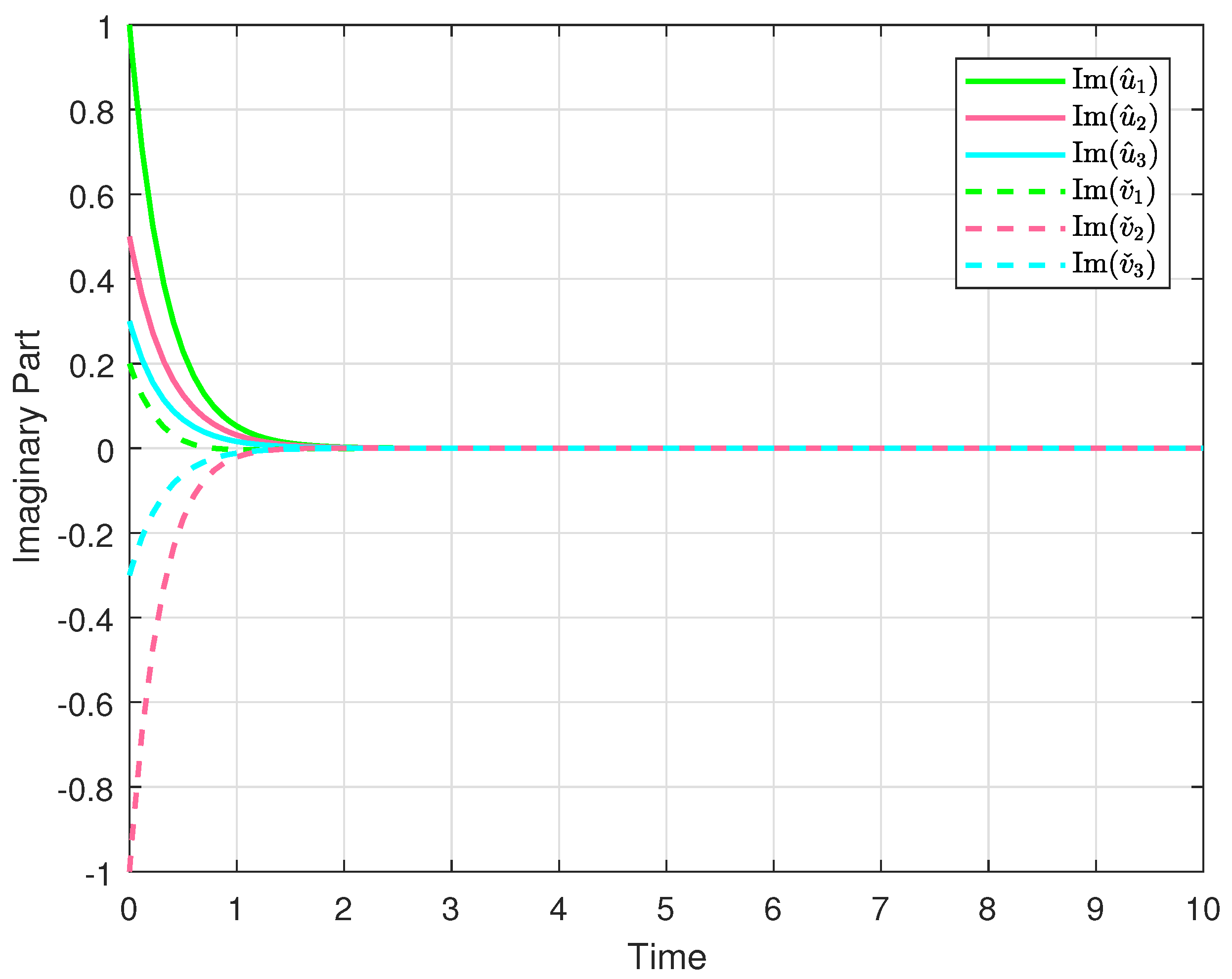
- Furthermore, carefully designed numerical simulations validate the theoretical results, demonstrating the effectiveness and practicality of the derived stability conditions.
2. Preliminaries
3. Main Results
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kosko, B. Adaptive bidirectional associative memories. Appl. Opt. 1987, 26, 4947–4960. [Google Scholar] [CrossRef] [PubMed]
- Arik, S. New Criteria for Stability of Neutral-Type Neural Networks with Multiple Time Delays. IEEE Trans. Neural Networks Learn. Syst. 2019, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Thoiyab, N.M.; Fazly, M.; Vadivel, R.; Gunasekaran, N. Stability analysis for bidirectional associative memory neural networks: A new global asymptotic approach. AIMS Math. 2025, 10, 3910–3929. [Google Scholar] [CrossRef]
- Thoiyab, N.M.; Shanmugam, S.; Vadivel, R.; Gunasekaran, N. Frobenius Norm-Based Global Stability Analysis of Delayed Bidirectional Associative Memory Neural Networks. Symmetry 2025, 17, 183. [Google Scholar] [CrossRef]
- Chen, S.; Song, Q.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Global asymptotic stability of fractional-order complex-valued neural networks with probabilistic time-varying delays. Neurocomputing 2021, 450, 311–318. [Google Scholar] [CrossRef]
- Zhang, T.; Li, Y. Global exponential stability of discrete-time almost automorphic Caputo–Fabrizio BAM fuzzy neural networks via exponential Euler technique. Knowl.-Based Syst. 2022, 246, 108675. [Google Scholar] [CrossRef]
- Li, W.; Zhang, X.; Liu, C.; Yang, X. Global exponential stability conditions for discrete-time BAM neural networks affected by impulses and time-varying delays. Circuits Syst. Signal Process. 2024, 43, 4850–4868. [Google Scholar] [CrossRef]
- Gunasekaran, N.; Zhai, G. Sampled-data state-estimation of delayed complex-valued neural networks. Int. J. Syst. Sci. 2020, 51, 303–312. [Google Scholar] [CrossRef]
- Ozcan, N.; Arik, S. Global robust stability analysis of neural networks with multiple time delays. IEEE Trans. Circuits Syst. Regul. Pap. 2006, 53, 166–176. [Google Scholar] [CrossRef]
- Arik, S. New criteria for global robust stability of delayed neural networks with norm-bounded uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2013, 25, 1045–1052. [Google Scholar]
- Barabanov, N.E.; Prokhorov, D.V. A new method for stability analysis of nonlinear discrete-time systems. IEEE Trans. Autom. Control 2004, 48, 2250–2255. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Hagan, M. Stability analysis of layered digital dynamic networks using dissipativity theory. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 1692–1699. [Google Scholar] [CrossRef]
- Fang, T.; Sun, J. Stability of complex-valued recurrent neural networks with time-delays. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1709–1713. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, X.; Chen, J.; Guo, R.; Zhou, S. Further stability analysis for delayed complex-valued recurrent neural networks. Neurocomputing 2017, 251, 81–89. [Google Scholar] [CrossRef]
- Song, Q.; Yan, H.; Zhao, Z.; Liu, Y. Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects. Neural Netw. 2016, 79, 108–116. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Yu, S. Global asymptotic stability for a class of complex-valued Cohen–Grossberg neural networks with time delays. Neurocomputing 2016, 171, 1158–1166. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, L. Global stability analysis for delayed complex-valued BAM neural networks. Neurocomputing 2016, 173, 2083–2089. [Google Scholar] [CrossRef]
- Xu, D.; Tan, M. Delay-independent stability criteria for complex-valued BAM neutral-type neural networks with time delays. Nonlinear Dyn. 2017, 89, 819–832. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, Z.; Liu, X.; Lin, C. Existence, uniqueness, and exponential stability analysis for complex-valued memristor-based BAM neural networks with time delays. Appl. Math. Comput. 2017, 311, 100–117. [Google Scholar] [CrossRef]
- Liu, X.; Chen, T. Global exponential stability for complex-valued recurrent neural networks with asynchronous time delays. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 593–606. [Google Scholar] [CrossRef]
- Hu, J.; Wang, J. Global stability of complex-valued recurrent neural networks with time-delays. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 853–865. [Google Scholar] [CrossRef]
- Zhou, B.; Song, Q. Boundedness and complete stability of complex-valued neural networks with time delay. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1227–1238. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Li, Y.; Huang, X. Stability and Hopf bifurcation of fractional-order complex-valued single neuron model with time delay. Int. J. Bifurc. Chaos 2017, 27, 1750209. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, R.; Liu, X.; Lin, C. Lagrange exponential stability of complex-valued BAM neural networks with time-varying delays. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3072–3085. [Google Scholar] [CrossRef]
- Li, R.; Si, L.; Cao, J. Lagrange stability of quaternion-valued memristive neural networks on time scales: Linear optimization method. J. Supercomput. 2025, 81, 425. [Google Scholar] [CrossRef]
- Zhao, R.; Wang, B.; Jian, J. Global μ-stabilization of quaternion-valued inertial BAM neural networks with time-varying delays via time-delayed impulsive control. Math. Comput. Simul. 2022, 202, 223–245. [Google Scholar] [CrossRef]
- Sri Raja Priyanka, K.; Nagamani, G. Exponentially Decaying Memory Recovery Feedback Controller Design for Quasi-Synchronization of Complex-Valued Discrete-Time Neural Networks. Int. J. Adapt. Control Signal Process. 2025, 39, 1064–1078. [Google Scholar] [CrossRef]
- Chen, Y.; Shi, Y.; Guo, J.; Cai, J. Global exponential stability for quaternion-valued neural networks with time-varying delays by matrix measure method. Comput. Appl. Math. 2025, 44, 57. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, X.; Guan, H.; Zhang, X. Concise Exponential Stability Conditions for BAM Quaternion Memristive Neural Networks Affected by Mixed Delays. Circuits Syst. Signal Process. 2025, 44, 128–140. [Google Scholar] [CrossRef]
- Dong, T.; He, R.; Li, H.; Hu, W.; Huang, T. Exponential Stabilization of Phase-Change Inertial Neural Networks With Time-Varying Delays. IEEE Trans. Syst. Man Cybern. Syst. 2025, 55, 2659–2669. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thoiyab, N.M.; Shanmugam, S.; Vadivel, R.; Gunasekaran, N. Novel Results on Global Asymptotic Stability of Time-Delayed Complex Valued Bidirectional Associative Memory Neural Networks. Symmetry 2025, 17, 834. https://doi.org/10.3390/sym17060834
Thoiyab NM, Shanmugam S, Vadivel R, Gunasekaran N. Novel Results on Global Asymptotic Stability of Time-Delayed Complex Valued Bidirectional Associative Memory Neural Networks. Symmetry. 2025; 17(6):834. https://doi.org/10.3390/sym17060834
Chicago/Turabian StyleThoiyab, N. Mohamed, Saravanan Shanmugam, Rajarathinam Vadivel, and Nallappan Gunasekaran. 2025. "Novel Results on Global Asymptotic Stability of Time-Delayed Complex Valued Bidirectional Associative Memory Neural Networks" Symmetry 17, no. 6: 834. https://doi.org/10.3390/sym17060834
APA StyleThoiyab, N. M., Shanmugam, S., Vadivel, R., & Gunasekaran, N. (2025). Novel Results on Global Asymptotic Stability of Time-Delayed Complex Valued Bidirectional Associative Memory Neural Networks. Symmetry, 17(6), 834. https://doi.org/10.3390/sym17060834