
Development of a Micro-Radian Phasemeter and Verification Based on Single Pilot Tone for Space Gravitational Wave Detection



Abstract
1. Introduction
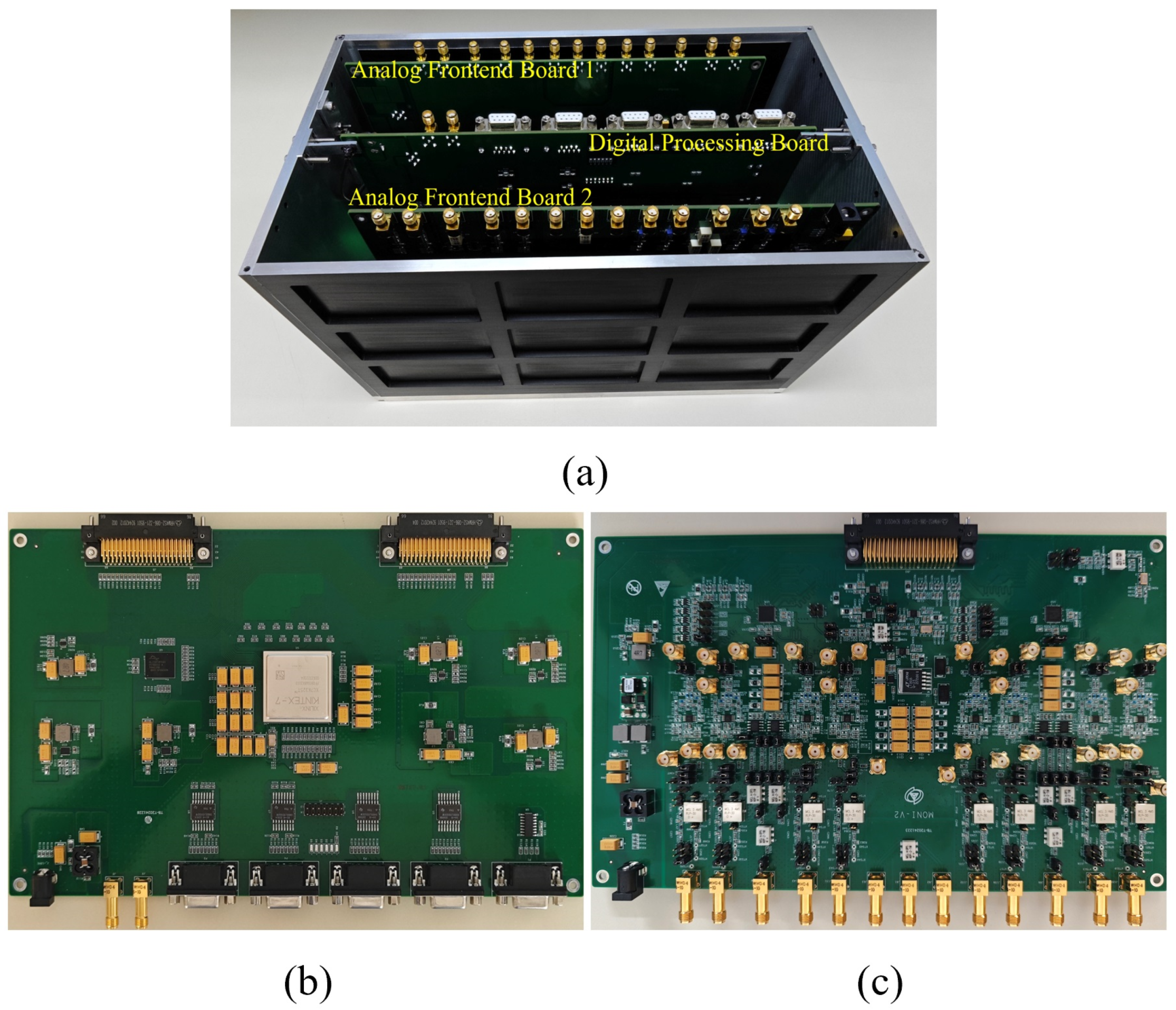
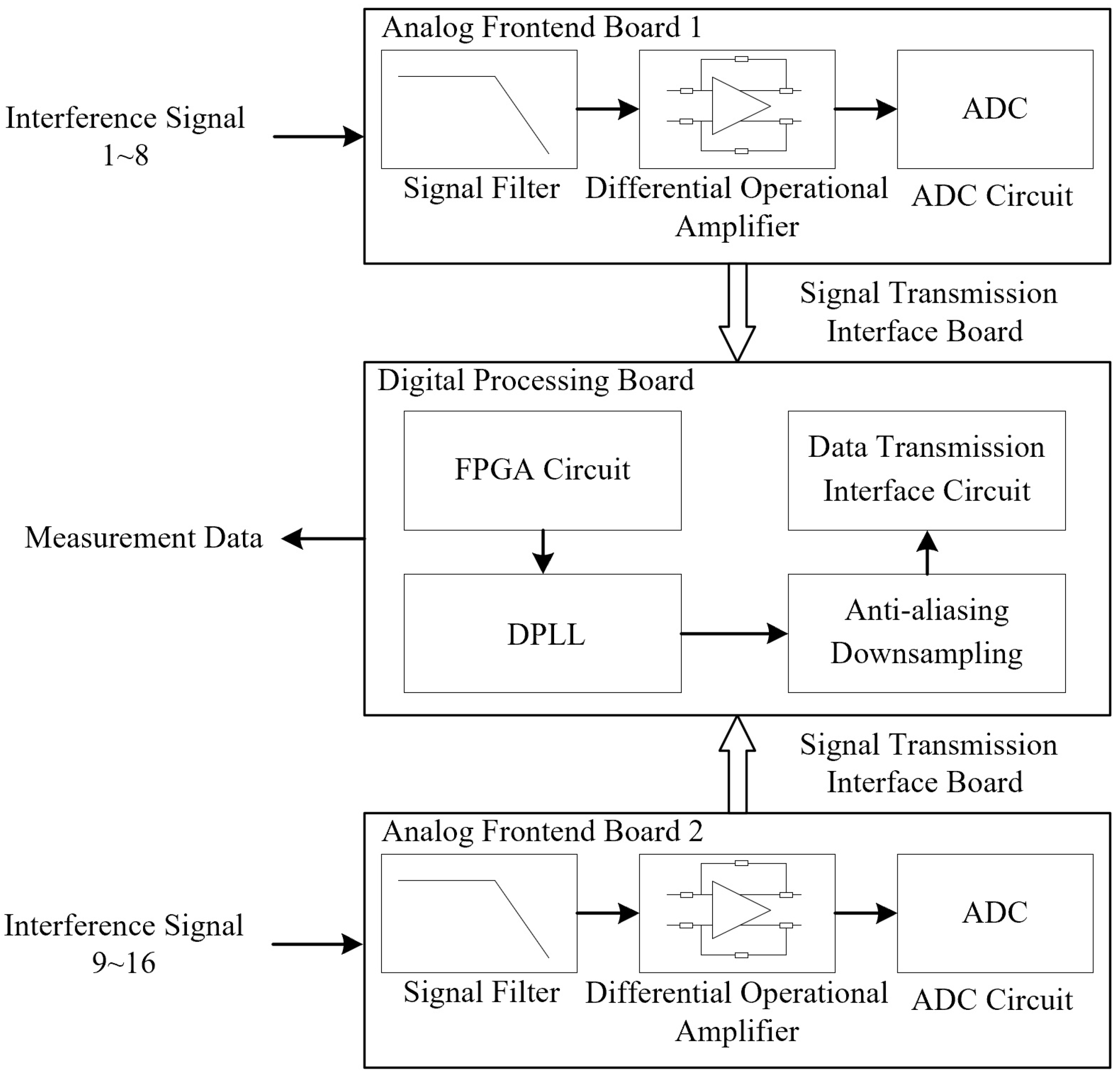
2. The Development of Phasemeter
2.1. Signal Filtering Circuit
2.2. Differential Operational Amplifier Circuit
2.3. ADC Circuit
2.4. FPGA Circuit
2.5. Data Transmission Interface Circuit
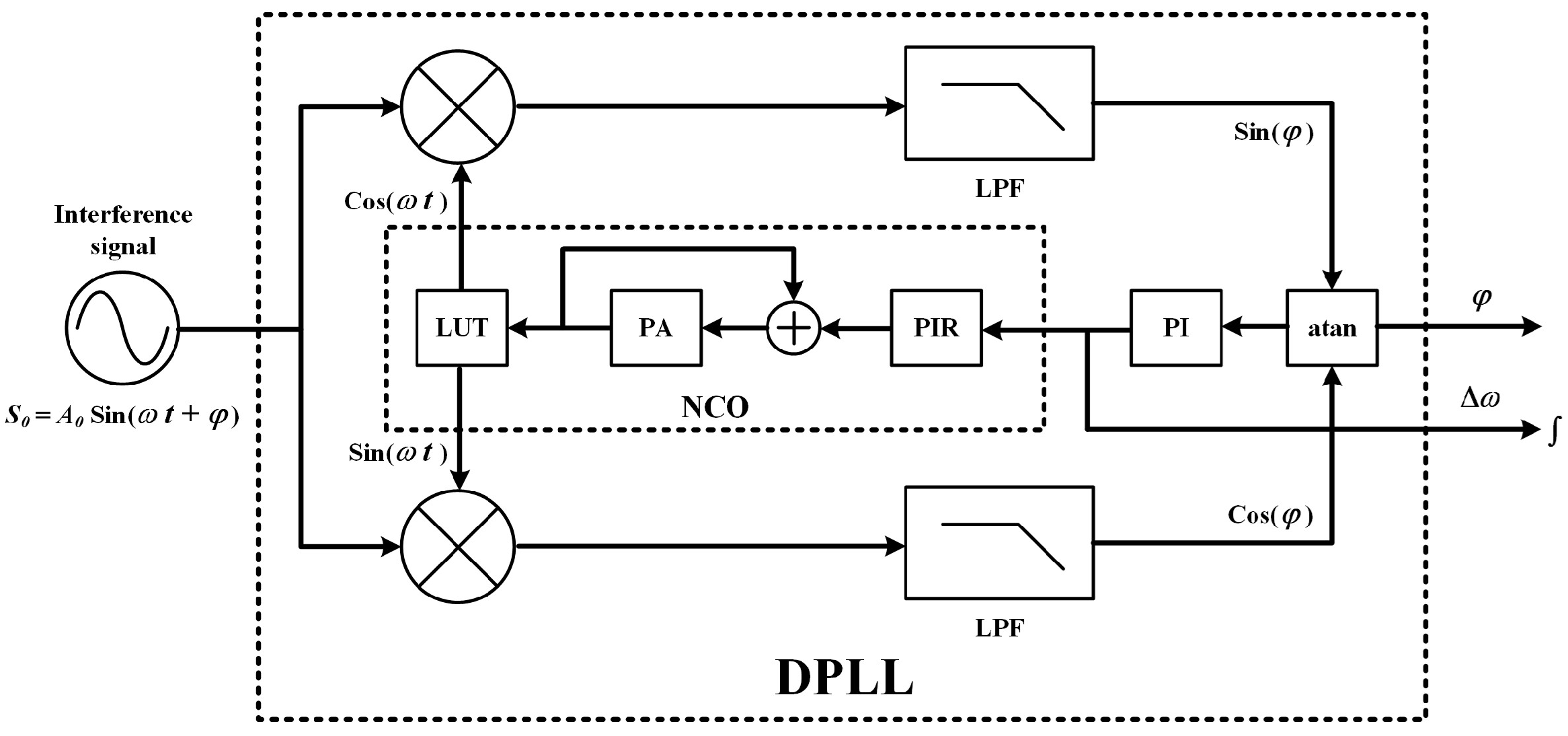
2.6. DPLL (Digital Phase-Locked Loop)
2.7. Anti-Aliasing Downsampling
3. The Verification of Phasemeter
3.1. Phasemeter Performance Evaluation Method
3.1.1. Absolute Measurement
3.1.2. Split Measurement
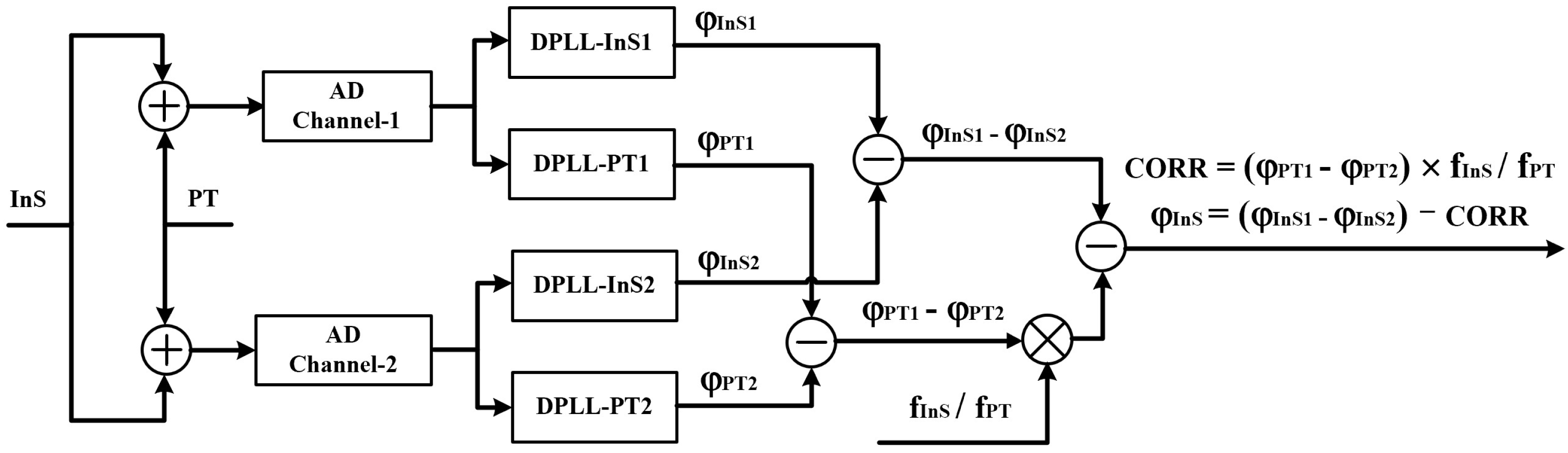
3.1.3. Sampling Jitter Noise Suppression
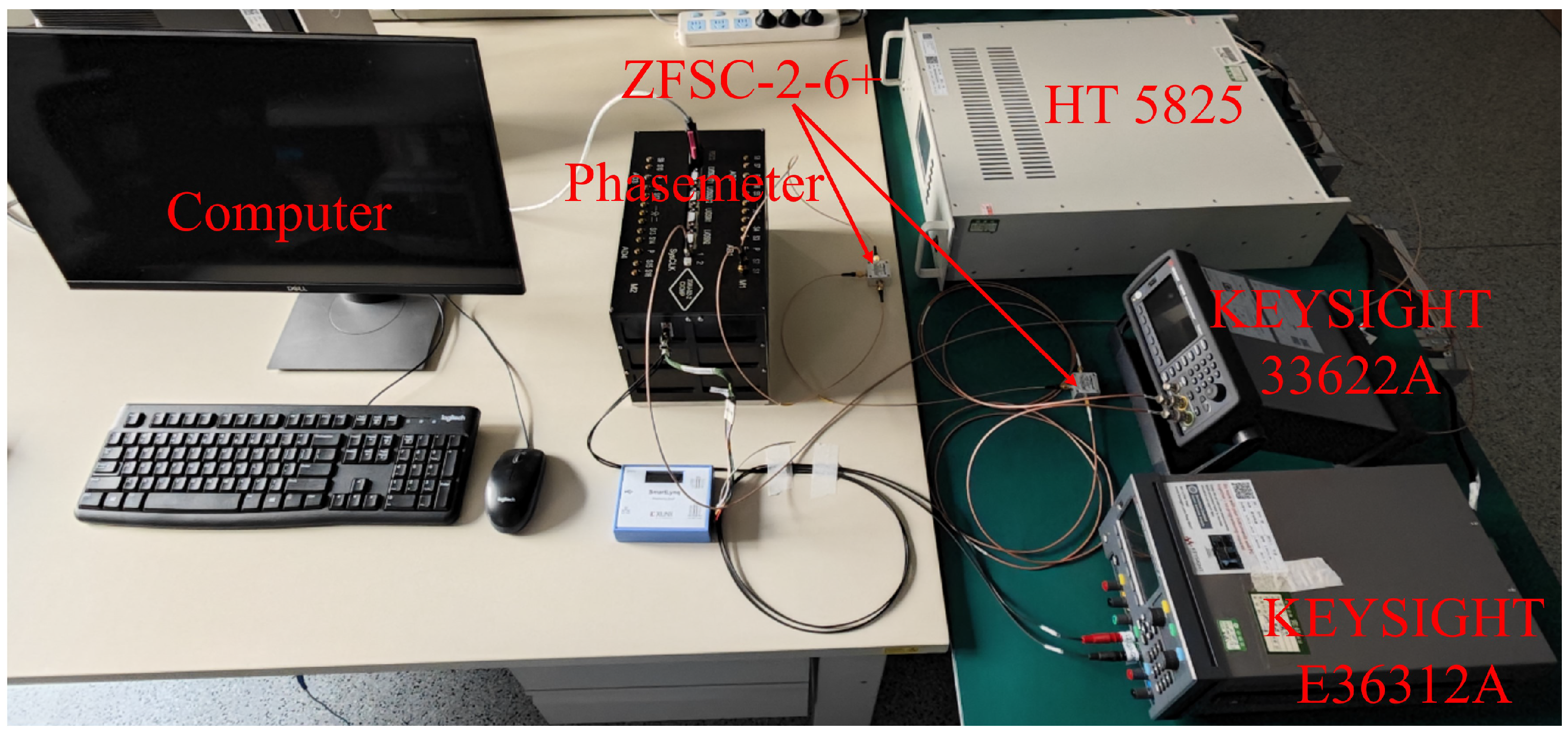
3.2. Experiment
4. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Einstein, A.; Rosen, N. On gravitational waves. J. Frankl. Inst. 1937, 223, 43–54. [Google Scholar] [CrossRef]
- Ju, L.; Blair, D.; Zhao, C. Detection of gravitational waves. Rep. Prog. Phys. 2000, 63, 1317. [Google Scholar] [CrossRef]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Abernathy, M.R.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; et al. Observation of gravitational waves from a binary black hole merger. Phys. Rev. Lett. 2016, 116, 061102. [Google Scholar] [PubMed]
- Pitkin, M.; Reid, S.; Rowan, S.; Hough, J. Gravitational wave detection by interferometry (ground and space). Living Rev. Relativ. 2011, 14, 5. [Google Scholar] [PubMed]
- Vitale, S.; Bender, P.; Brillet, A.; Buchman, S.; Cavalleri, A.; Cerdonio, M.; Cruise, M.; Cutler, C.; Danzmann, K.; Dolesi, R.; et al. LISA and its in-flight test precursor SMART-2. Nucl. Phys.-Proc. Suppl. 2002, 110, 209–216. [Google Scholar] [CrossRef]
- Danzmann, K.; LISA Science Team. LISA—An ESA cornerstone mission for the detection and observation of gravitational waves. Adv. Space Res. 2003, 32, 1233–1242. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Auger, G.; Baird, J.T.; Bassan, M.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Caleno, M.; et al. Sub-femto-g free fall for space-based gravitational wave observatories: LISA pathfinder results. Phys. Rev. Lett. 2016, 116, 231101. [Google Scholar] [CrossRef]
- Hu, W.R.; Wu, Y.L. The Taiji Program in Space for gravitational wave physics and the nature of gravity. Natl. Sci. Rev 2017, 4, 685–686. [Google Scholar] [CrossRef]
- Luo, Z.R.; Liu, H.S.; Jin, G. The recent development of interferometer prototype for Chinese gravitational wave detection pathfinder mission. Opt. Laser Technol. 2018, 105, 146–151. [Google Scholar]
- Luo, J.; Chen, L.S.; Duan, H.Z.; Gong, Y.G.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A space-borne gravitational wave detector. Class. Quantum Gravity 2016, 33, 035010. [Google Scholar] [CrossRef]
- Min, J.; Wang, Z.L.; Li, Y.P.; Tao, W.Z.; Li, C.H.; Lei, J.G.; Xi, D.X.; Fan, D.; Wang, J.B. Drop tower tests of Taiji-1 inertial sensor substitute. NPJ Microgravity 2021, 7, 25. [Google Scholar]
- Barke, S.; Brause, N.; Bykov, I.; Esteban Delgado, J.J.; Enggaard, A.; Gerberding, O.; Heinzel, G.; Kullmann, J.; Pedersen, S.M.; Rasmussen, T. LISA Metrology System-Final Report; PubMan Inc.: Atlanta, GA, USA, 2014. [Google Scholar]
- Yamamoto, K.; Vorndamme, C.; Hartwig, O.; Staab, M.; Schwarze, T.S.; Heinzel, G. Experimental verification of intersatellite clock synchronization at LISA performance levels. Phys. Rev. D 2022, 105, 042009. [Google Scholar]
- Zhang, J.; Ma, X.; Zhao, M.; Peng, X.; Gao, C.; Yang, Z. Advanced inter-spacecraft offset frequency setting strategy for the Taiji program based on a two-stage optimization algorithm. Appl. Opt. 2023, 62, 4370–4380. [Google Scholar] [CrossRef] [PubMed]
- Reinhardt, J.N.; Hartwig, O.; Heinzel, G. Clock synchronization and light-travel-time estimation for space-based gravitational-wave detectors. Class. Quantum Gravity 2025, 42, 055014. [Google Scholar]
- Zhang, J.; Yang, Z.; Ma, X.; Peng, X.; Liu, H.; Tang, W.; Zhao, M.; Gao, C.; Qiang, L.E.; Han, X.; et al. Inter-spacecraft offset frequency setting strategy in the Taiji program. Appl. Opt. 2022, 61, 837–843. [Google Scholar] [CrossRef] [PubMed]
- Luo, Z.R.; Wang, Y.; Wu, Y.L.; Hu, W.R.; Jin, G. The Taiji program: A concise overview. Prog. Theor. Exp. Phys. 2021, 2021, 05A108. [Google Scholar]
- Luo, J.; Bai, S.; Bai, Y.Z.; Cai, L.; Dang, H.; Dong, Q.; Duan, H.Z.; Du, Y.; Fan, L.; Fu, X.; et al. Progress of the TianQin project. arXiv 2025, arXiv:2502.11328. [Google Scholar]
- Zeng, H.; Yan, H.; Xie, S.; Jiang, S.; Li, Y.; Pan, Y.; He, D.; Du, Y.; Yeh, H.c. Experimental demonstration of weak-light inter-spacecraft clock jitter readout for TianQin. Opt. Express 2023, 31, 34648–34666. [Google Scholar]
- Xu, M.; Tan, Y.; Wu, H.; Wang, P.; Yan, H.; Liang, Y.; Shao, C. Influence of EOM sideband modulation noise on space-borne gravitational wave detection. Results Phys. 2024, 57, 107366. [Google Scholar]
- Liu, H.S.; Yu, T.; Luo, Z.R. A low-noise analog frontend design for the Taiji phasemeter prototype. Rev. Sci. Instruments 2021, 92, 054501. [Google Scholar]
- Huang, X.; Wang, G.; Yang, M.; Yang, Z.; Cai, C.; Ming, M.; Zhang, J.; Yang, S.; Tu, L.; Duan, H.; et al. Study on picometer-level laser interferometer readout system in TianQin project. Opt. Laser Technol. 2023, 161, 109185. [Google Scholar] [CrossRef]
- Zhang, Q.T.; Liu, H.S.; Luo, Z.R. Multi-Channel Phase Measurement System for the Space Laser Interferometry. Chin. Opt. 2023, 16, 1089–1099. [Google Scholar]
- Kullmann, J. Development of a Digital Phase Measuring System with Microradian Precision for LISA. Ph.D. Thesis, Leibniz Universität Hannover, Hannover, Germany, 2012. [Google Scholar]
- Gerberding, O.; Sheard, B.; Bykov, I.; Kullmann, J.; Delgado, J.J.E.; Danzmann, K.; Heinzel, G. Phasemeter core for intersatellite laser heterodyne interferometry: Modelling, simulations and experiments. Class. Quantum Gravity 2013, 30, 235029. [Google Scholar]
- Yang, P.; Yu, T.; Xue, K.; Pan, M.; Long, H.; Wang, Z.; Zhou, J. Four-Module Cascaded Downsampling Filter for Phasemeter in Space Gravitational Wave Detection. Symmetry 2025, 17, 258. [Google Scholar] [CrossRef]
- Gerberding, O. Phase Readout for Satellite Interferometry. Ph.D. Thesis, Technische Informationsbibliothek und Universitätsbibliothek Hannover (TIB), Hannover, Germany, 2014. [Google Scholar]
- Hewitson, M.; Armano, M.; Benedetti, M.; Bogenstahl, J.; Bortoluzzi, D.; Bosetti, P.; Brandt, N.; Cavalleri, A.; Ciani, G.; Cristofolini, I.; et al. Data analysis for the LISA Technology Package. Class. Quantum Gravity 2009, 26, 094003. [Google Scholar]
- Simon, B. Inter-Spacecraft Frequency Distribution for Future Gravitational Wave Observatories. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität Hannover, Hannover, Germany, 2015. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
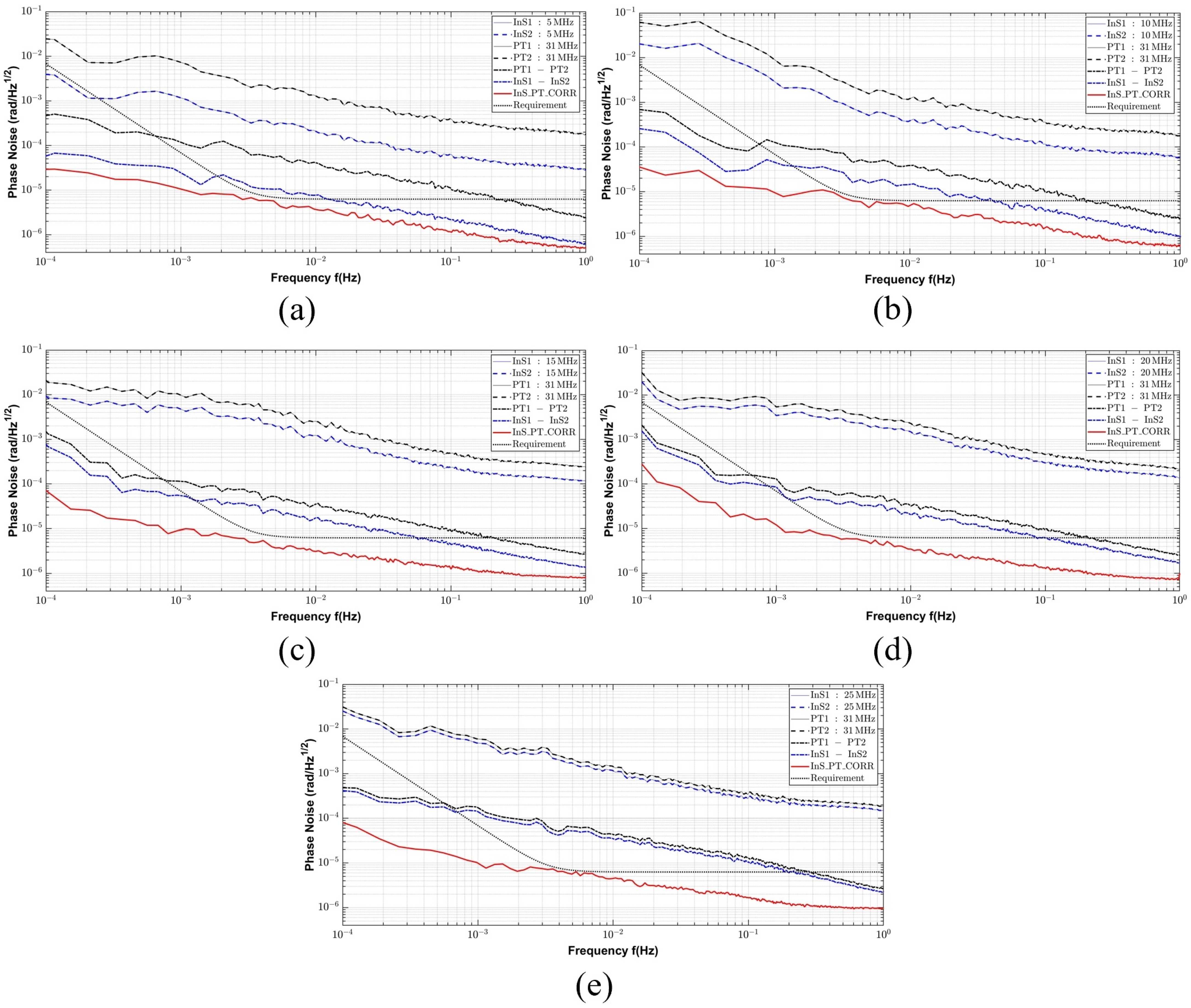
| InS | @ 1 Hz | @ 100 mHz | @ 10 mHz | @ 1 mHz | @ 0.1 mHz |
|---|---|---|---|---|---|
| 5 MHz | 0.49 μrad | 1.13 μrad | 3.56 μrad | 9.62 μrad | 29.48 μrad |
| 10 MHz | 0.60 μrad | 1.56 μrad | 4.91 μrad | 9.50 μrad | 35.59 μrad |
| 15 MHz | 0.85 μrad | 1.26 μrad | 3.11 μrad | 9.41 μrad | 72.60 μrad |
| 20 MHz | 0.94 μrad | 1.27 μrad | 3.48 μrad | 12.02 μrad | 282.03 μrad |
| 15 MHz | 0.96 μrad | 1.66 μrad | 4.47 μrad | 9.89 μrad | 80.37 μrad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, T.; Xue, K.; Long, H.; Pan, M.; Wang, Z.; Liu, Y. Development of a Micro-Radian Phasemeter and Verification Based on Single Pilot Tone for Space Gravitational Wave Detection. Symmetry 2025, 17, 519. https://doi.org/10.3390/sym17040519
Yu T, Xue K, Long H, Pan M, Wang Z, Liu Y. Development of a Micro-Radian Phasemeter and Verification Based on Single Pilot Tone for Space Gravitational Wave Detection. Symmetry. 2025; 17(4):519. https://doi.org/10.3390/sym17040519
Chicago/Turabian StyleYu, Tao, Ke Xue, Hongyu Long, Mingzhong Pan, Zhi Wang, and Yunqing Liu. 2025. "Development of a Micro-Radian Phasemeter and Verification Based on Single Pilot Tone for Space Gravitational Wave Detection" Symmetry 17, no. 4: 519. https://doi.org/10.3390/sym17040519
APA StyleYu, T., Xue, K., Long, H., Pan, M., Wang, Z., & Liu, Y. (2025). Development of a Micro-Radian Phasemeter and Verification Based on Single Pilot Tone for Space Gravitational Wave Detection. Symmetry, 17(4), 519. https://doi.org/10.3390/sym17040519