1. Introduction
The study of Hyers–Ulam (HU) and Hyers–Ulam–Rassias stabilities has gained significant attention due to their potential applications, especially in equations that exhibit time symmetry. These stability concepts are valuable in situations where an exact solution may be challenging to obtain, yet an approximate solution can be found that remains stable under certain time-dependent conditions. This has led to extensive research in various types of equations, including functional [
1,
2,
3], integral [
4,
5,
6], fractional [
7,
8], differential, and integro-differential equations [
9,
10,
11,
12,
13]. The relevance of these stabilities, connected to time-related symmetry, is reflected in their practical applications across diverse fields such as fluid dynamics, heat conduction, and other time-sensitive systems. The concept of stability for functional equations can be traced back to a well-known problem posed by S. M. Ulam [
14] in 1940. Ulam’s inquiry focused on identifying the conditions under which the solution of an equation that differs “slightly” from a specified equation remains approximate to the solution of the original equation. D. H. Hyers [
15] provided a solution to Ulam’s query in Banach spaces, which is now known as HU stability. Later, Th. M. [
16] Rassias extended this idea by considering control function in the conditions and introducing the concept of HU–Rassias stability.
In this study, we will examine the HU and HU–Rassias stabilities for the subsequent class of integral equations
and for the Volterra integral equation
and for the integro-differential equations
Here, the function and the kernel both are continuous functions. Also, are continuous delay functions with and for all . Throughout this paper, these conditions remain same.
The formal definitions of the previously mentioned stability types for the above integral equations are as follows:
Hyer–Ulam Stability: Suppose for every function
satisfy the following
there exist a solution
for the integral equation, such that
where
K is a constant that is independent of
and
.
Hyer–Ulam–Rassias Stability: Suppose for every function
, which satisfies
where
is a control function, there exists a solution
of the integral equation, such that
where
K is a constant that is independent of
and
.
The problem of the convergence of measurable functions with respect to a measure leads to a generalization of the notion of a metric. The concept of b-metric space was introduced by Czerwik [
17].
b-metric Space: [
17,
18] Let
X be a non-empty set. A function
is called b-metric if it satisfies the following properties:
.
.
Here, and And the space is known as b-metric space.
It is clear that the definiton of b-metric space is an extension of the usual metric space. Also, if we consider
in the definiton of b-metric space, then we obtain the definition of the usual metric space. For this reason, our results are more general than the same results in the (usual) metric space. Researchers like Czerwik, Brzdek, Diaz, Margolis [
8,
17,
18,
19], and many others have studied b-metric spaces, where they have solved functional equations and derived fixed-point theorems along with their extensions within these spaces. Researchers like Grossman, Burton, Sevgin, Sevli, Castro, and Ramos [
1,
2,
6,
7,
10] have worked on the stability of integral and integro-differential equations in various spaces using fixed-point and iterative methods. Inspired by their work, we investigate the stability conditions for three distinct classes of integral and integro-differential equations in b-metric spaces, specifically within the space of all continuous functions. Stability conditions for integral and integro-differential equations in b-metric space play a crucial role in ensuring the reliability of solutions under small perturbations across various fields. For Volterra integral equations, often used in ecological and economic models with memory, stability ensures that slight changes in initial conditions do not lead to large deviations, making the models predictable. In Fredholm integral equations, which appear in boundary and equilibrium problems in physics and engineering, stability within b-metric spaces helps maintain the consistency of solutions even when boundary inputs or kernel functions experience small variations. For integro-differential equations, commonly found in control systems and fluid dynamics, stability provides bounds on error propagation, ensuring that systems maintain robust and predictable behavior. Together, these stability conditions are essential for the dependable application of these equations in analyzing complex systems.The stability analysis in b-metric spaces provides a more versatile, comprehensive, and practical framework for researchers than the standard metric. This approach enables the investigation of a wider range of stability problems and facilitates the integration of results across different types of spaces, thus broadening the scope of potential applications and advancing our understanding in this area.
In this paper, we have systematically developed the stability conditions for three distinct classes of integral and integro-differential equations in b-metric spaces, focusing on both Hyers–Ulam and Hyers–Ulam–Rassias stability. Each section is dedicated to a specific type of equation, where the results found in each section outline sufficient conditions for stability.
Section 2 addresses Fredholm integral equations, presenting Theorems 1 and 2 for Hyers–Ulam and Hyers–Ulam–Rassias stability, respectively. In
Section 3, the focus shifts to Volterra integral equations, with Theorems 3 and 4 covering similar stability criteria.
Section 4 then explores integro-differential equations, establishing stability through Theorems 5 and 6. To clarify the theoretical findings, we provide illustrative examples: Example 1 in
Section 3 applies our results to a Fredholm integral equation, while Example 2 in
Section 4 demonstrates the stability of an integro-differential equation. These examples demonstrate the practical application of the theoretical results, bridging the gap between abstract stability theory and concrete applications.
Theorem 1 ([
18,
20] (Banach Fixed-Point Theorem)).
Suppose is a generalized complete metric space and is a strictly contractive operator with a Lipschitz constant . If there exists a non-negative integer m, such that for some , then the following conditions hold:the sequence converges to a fixed point of T;
is the unique fixed point of T in ;
2. Stability of Fredholm Integral Equation
Lemma 1. Let be the space of continuous functionsendowed with a b-metric on , defined bywhere is some real constant. Clearly, is a complete b-metric space. Proof. We show that is a complete b-metric space.
For any
,
and
, which implies
.
For any
,
For any
,
by using the triangular property for the absolute norm and taking supremum over
, we have
where
.
Thus,
is a b-metric space. Next, we prove the completeness of the space. To prove this, we have to show that every Cauchy sequence in
converges to the limit in
. Let
be a Cauchy sequence in
, so from the definition of the Cauchy sequence, for any
, there exists a positive integer
N, such that for all
Since
is a complete metric space with respect to standard supremum norm, then there exist a function
, such that
uniformly, which implies
converges to
as well:
Hence, is a limit of the Cauchy sequence in , which implies that is a complete metric space. □
We will deal with the following integral equation and find the sufficient condition for the stability in
b-metric space:
Now, we prove the above integral equation has Hyers–Ulam and Hyers–Ulam–Rassias stability. We show the results using the fixed-point method.
Theorem 2. Let be a continuous function, which satisfies the Lipschitz conditionwhere and is the kerne, which also satisfies the Lipschitz condition If followsand , then there exists a function , which is unique, such thatand Proof. Define the operator
, such that
for all
and
. Next, we will prove
T is the strictly contractive operator with respect to the metric defined in (
1). Now, for all
,
Hence, using the assumption that
, we conclude
T is strictly contractive operator. Hence, we can utilize the previously established Banach Fixed Point Theorem [
20], which assures the HU stability for the integral equation. Moreover, by applying the Banach Fixed Point Theorem [
18,
20] once more, we are guaranteed that
Now, using the definition of the b-metric and inequality (2.5), we obtain
□
This implies that, under the given conditions, the given Fredholm integral equation possesses Hyer–Ulam stability.
Theorem 3. Let be a continuous function that satisfies the Lipschitz conditionwhere and is the kernel, which also satisfies the Lipschitz condition If followswhere is a continuous control function and , then there exists a function , which is unique, such thatand Proof. Consider the operator
, such that
for all
and
. Now, by following the same procedure as that in the proof of Theorem 2, we can conclude that
T is strictly contractive with respect to the metric defined in (
1), as
. Hence, we can utilize the previously established Banach Fixed-Point Theorem [
20], which assures HU–Rassias stability for the integral equation. Moreover, by using the Banach Fixed-Point [
18,
20] Theorem once more and using the inequality (
12) and definition of
-metric, it follows that
□
This implies that, under the given conditions, the given Fredholm integral equation possesses Hyer–Ulam–Rassias stability.
3. Stability of Volterra Integral Equation
In this segment, we work with the following integral equation and find the sufficient condition for the HU–Rassias and HU stabilities using the fixed-point method.
Theorem 4. Let be a continuous function, which satisfies the Lipschitz conditionwhere and is the kernel, which also satisfies the Lipschitz conditionwith . If is such thatwhere is a continuous control function and , then there exists a function uniquely, such thatand Proof. First consider the operator
, such that
Next, we will prove that
T is the strictly contractive operator with respect to the metric defined in (
1). Now, for all
,
Hence, using the assumption that
, we conclude that
T is strictly a contractive operator. Hence, we can utilize the previously established Banach Fixed-Point Theorem [
20], which assures the HU stability for the integral equation. Moreover, by applying the Banach Fixed-Point Theorem [
18,
20] again, we obtain that
Now, using the definition of the b-metric and inequality (
22), we obtain
□
This implies that, under the given conditions, the given Volterra integral equation with two delay functions possesses Hyer–Ulam–Rassias stability.
Theorem 5. Let be a continuous function that satisfies the Lipschitz conditionwhere and is the kernel, which also satisfies the Lipschitz condition If followsand , then there exists a function which is unique, such thatand Proof. Consider the operator
, such that
for all
and
. Now, by following the same procedure as that in the proof of Theorem 4, we can conclude that
T is strictly contractive with respect to the metric defined in (
1) since
. Hence, we can utilize the previously established the Banach Fixed-Point Theorem [
20], which assures the HU–Rassias stability for the integral equation. Moreover, by applying the Banach Fixed-Point Theorem [
18,
20] once more and using the inequality (
31) and definition of the
-metric, it follows that
□
This implies that, under the given conditions, the given Volterra integral equation possesses Hyer–Ulam stability.
Now, we will provide an example to demonstrate how the above-mentioned conditions can be achieved, which is one of practical example of our theortical results.
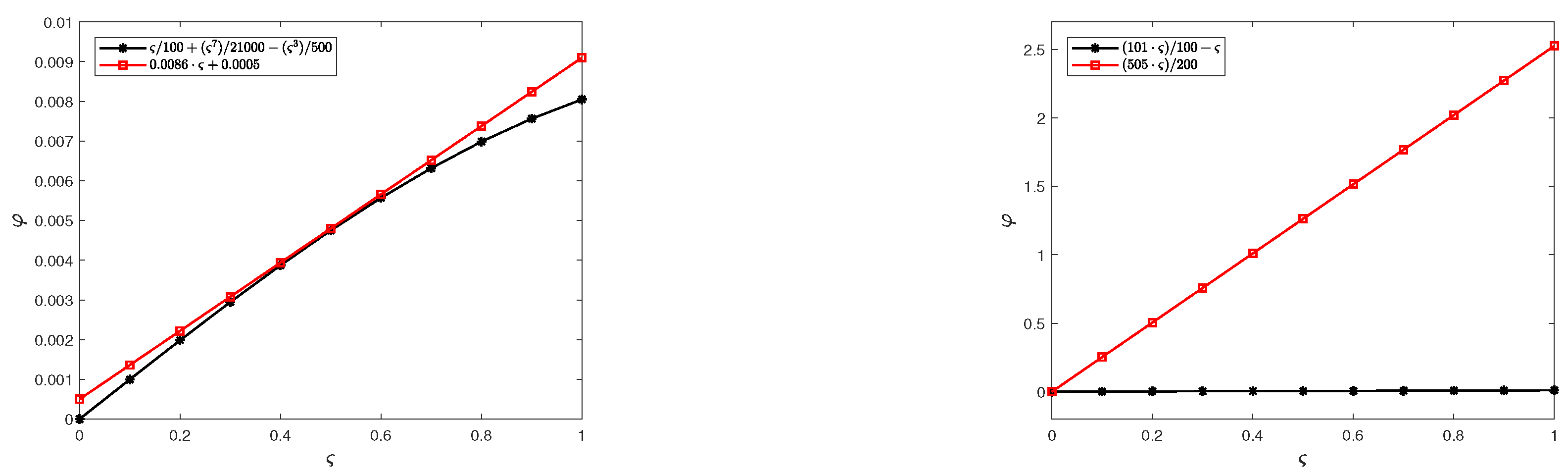
Example 1. Firstly, we consider the integral equationwhere , is a continuous function, and are two continuous delay functions, defined as and . Also, and for all . Hence, all the conditions of Theorem 5 are satisfied. Now, given asis a continuous function fulfillingfor all Here, the value of the , the kernel defined as is a continuous function, which satisfies the following conditionhere, . Thus, taking , we obtain . If we choose , it follows Thus, we obtain the HUR stability of the integral Equation (37) from Theorem 5. Considering the specific solution for Equation (37), we have The comparison between the two functions using the inequalities (
40) and (
41) is shown in
Figure 1.
4. Stability of Integro-Differential Equation
In this section, we will find a sufficient condition for the HU–Rassias and HU stabilities of the following integro-differential equation
where
. Also, we consider the space
as the set of all functions that are continuously differentiable on the interval
. This space is equipped with a metric known as the b-metric defined as
and the space
is a complete metric space in the sense of the b-metric function.
Theorem 6. Let be a continuous function which satisfies the Lipschitz conditionwhere and is the kernel, which also satisfies the Lipschitz condition If followsand , then there exists a function which is unique, such thatand Proof. If we integrate the Equation (
42), we obtain
We define the operator
, such that
for all
and
. Now, we will prove that for any continuous function
,
is also continuous.
when
. Next, we will prove
T is the strictly contractive operator with respect to the metric defined in (
1). Now, for all
,
Hence, using the assumption that
, we conclude that
T is a strictly contractive operator. Hence, we can utilize the previously established the Banach Fixed-Point Theorem [
20], which assures the HU stability for the integral-differential equation. Moreover, by applying the Banach Fixed-Point Theorem [
18,
20] once more and using the inequality (
31) and the definition of
-metric, it follows that
□
This implies that, under the given conditions, the given integro-differential equation possesses Hyer–Ulam–Rassias stability.
Theorem 7. Let be a continuous function that satisfies the Lipschitz conditionwhere and is the kernel, which also satisfies the Lipschitz condition If followsand , then there exists a function which is unique, such thatand Proof. Consider the operator
, such that
for all
and
. Now, by following the same procedure as that used in the proof of Theorem 6, we can conclude that
T is strictly contractive with respect to the metric defined in (
1) since
. Hence, we can utilize the previously established the Banach Fixed-Point Theorem [
20], which assures the HU–Rassias stability for the integral equation. Moreover, by applying the Banach Fixed-Point Theorem [
18,
20] once more and using the inequality (
54) and definition of
-metric, it follows that
□
This implies that, under the given conditions, the given integro-differential equation possesses Hyer–Ulam stability.
Example 2. Firstly, we consider the integral equationwhere , is a continuous function, and are two continuous delay functions, defined as and . Also, and for all . Hence, all the conditions of Theorem 6 are satisfied. Now, defined byis a continuous function fulfillingfor all Here, the value of , the kernel defined by is a continuous function, which satisfies the following conditionhere, . Thus, taking , we obtain . If we take , then we have Thus, we obtain the HUR stability of the integral Equation (59) from Theorem 6. Considering the specific solution for Equation (59), we have The comparison between the two functions using the inequalities (
62) and (
63) is shown in
Figure 2.


 ,
, 



{kind=link}
{kind=link}