
DTSA: Dynamic Tree-Seed Algorithm with Velocity-Driven Seed Generation and Count-Based Adaptive Strategies

 , , , and
, , , and 
Abstract
1. Introduction
1.1. Motivations
- The existing seed generation mechanism in TSA lacks consideration of population attributes and may lead to seeds being generated in less favorable regions of the search space [41]. By redesigning the tree selection process, we aim to improve the quality of generated seeds and enhance the algorithm’s overall performance.
- In the TSA evolutionary process, interactions solely between trees and seeds ignore potential interactions among trees, reducing population diversity [42]. To tackle this, we propose a tree population strategy to boost diversity and speed up convergence.
- Many optimization algorithms rely on simplistic initialization methods, such as uniform random sampling, which may result in a less diverse initial population [43]. By rethinking the initialization process, we aim to improve the exploration–exploitation balance and enhance the algorithm’s robustness across various optimization scenarios.
1.2. Contribution
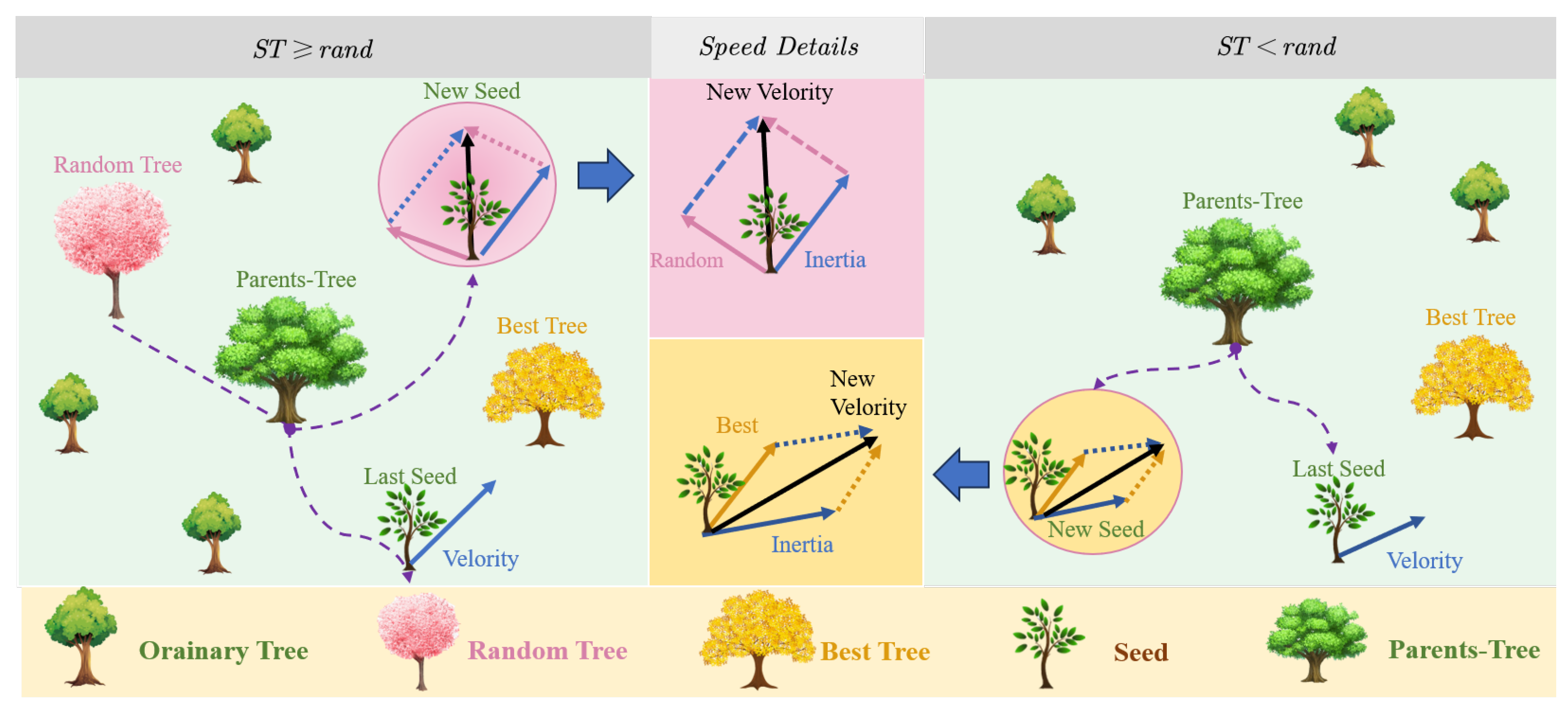
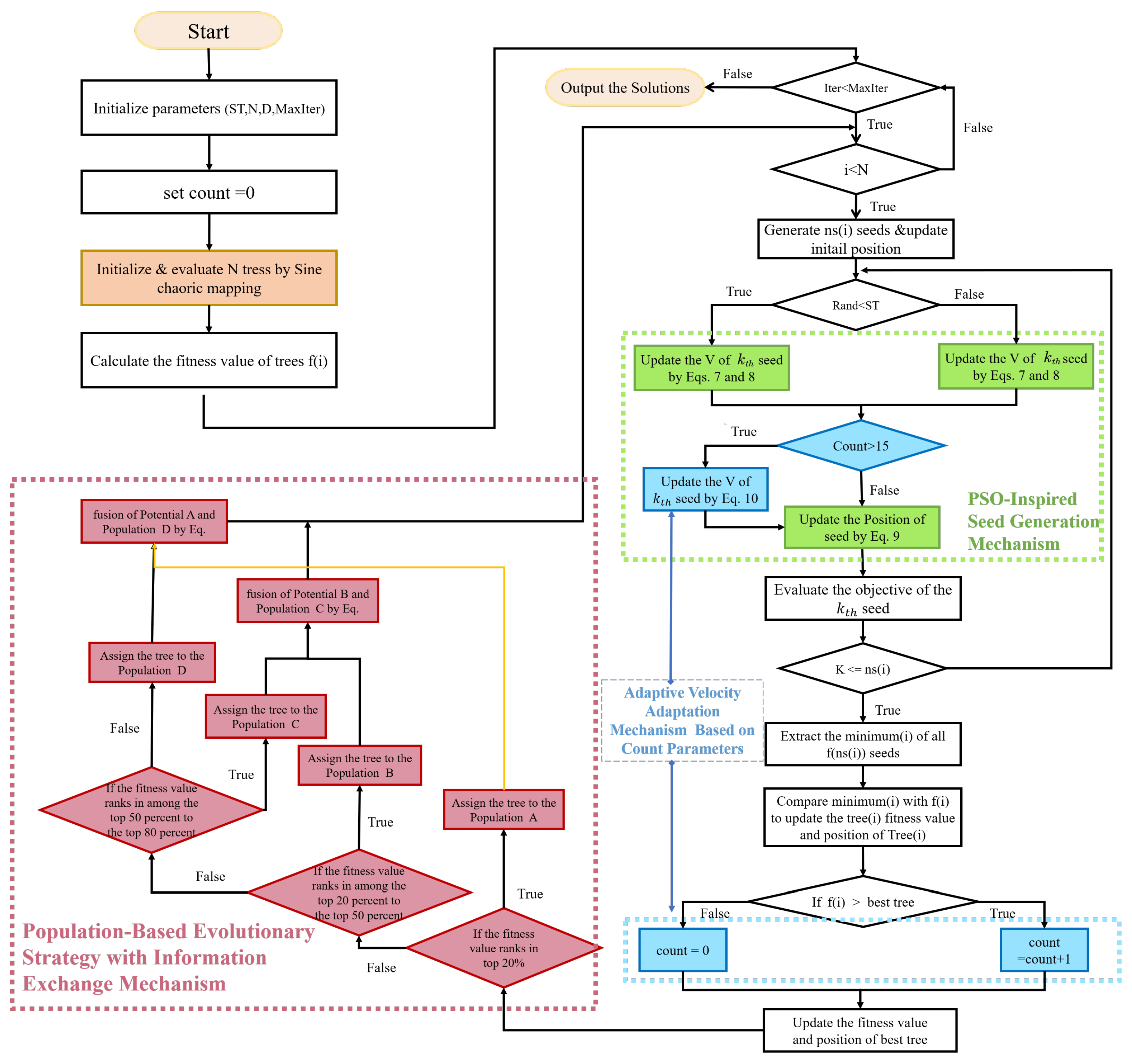
- PSO-Inspired seed generation mechanism: The significant advancement of this TSA variant lies in its seed generation technique, which is inspired by PSO. By utilizing velocity vectors for updating seed positions, this approach introduces a dynamic and adaptive element to the exploration–exploitation equilibrium, thereby augmenting the algorithm’s efficacy in traversing the search space efficiently.
- Adaptive dynamic parameter update mechanism: The incorporation of adaptive weight (w) and constant (k) updates during the optimization process is a novel aspect. This adaptive mechanism allows the algorithm to dynamically adjust its exploration and exploitation tendencies based on the current iteration, contributing to improved convergence behavior and solution quality.
- Adaptive velocity adaptation mechanism based on count parameters: The introduction of a count-based adaptive mechanism for updating the velocity vectors contributes to the algorithm’s ability to dynamically adjust its behavior during different phases of the optimization process. The count parameter influences the exploration–exploitation trade-off, allowing the algorithm to adapt its strategy as the optimization progresses.
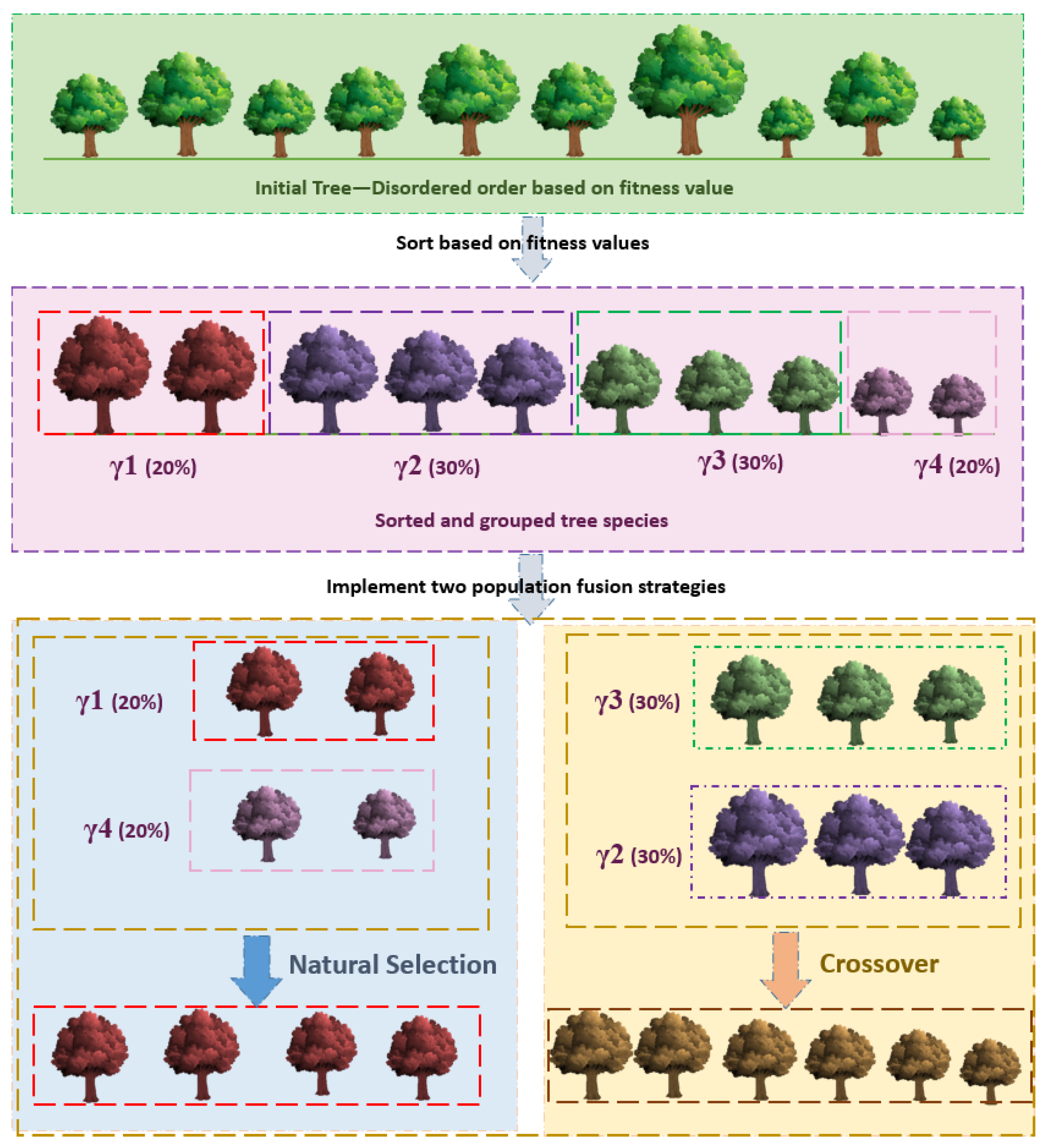
- Population-based evolutionary strategy with information exchange: The variant integrates an evolutionary strategy characterized by dynamic partitioning of the population into distinct subpopulations based on their respective fitness values. This innovative approach incorporates a combination of grouping, crossover, and natural selection operations. Crossover events are facilitated between the superior subpopulation and a subset of the inferior subpopulation, facilitating structured information exchange. Concurrently, a natural selection operation replaces the inferior subpopulation with the superior counterpart in terms of both position and velocity. This sophisticated methodology enhances the algorithm’s adaptability, facilitating the effective exploitation of promising solutions while concurrently preserving population diversity to mitigate premature convergence.
- Dynamic seeding with chaotic map: The sine chaotic map is used for generating random numbers during the initialization phase and seed production [45]. Chaotic maps can provide a better and more dynamic exploration of the search space compared to uniform random numbers. This can enhance the diversity of the seeds produced and potentially improve the algorithm’s ability to escape from local optima.
2. Related Work
2.1. A Brief Introduction to TSA
- Tree position initialization: The initial position of each tree () is determined by randomly selecting values for each dimension (j) within the specified bounds of the search space, using Equation (1).where is the j-th dimension of the i-th tree, and are the lower and upper bounds of the search space for dimension j, and is a random number in the range of .
- Tree-seed renewal mechanism: The seed renewal mechanism involves two update formulas for generating new seeds, considering both the current tree’s location and the optimal location of the entire tree population, which are calculated in Equations (2) and (3).where is the j-th dimension of the seed to be produced by the i-th tree, is the j-th dimension of the i-th tree, is the j-th dimension of the best tree location obtained so far, is the j-th dimension of a randomly selected tree (r) from the population, and is a scaling factor randomly generated in the range .
2.2. Literature Review
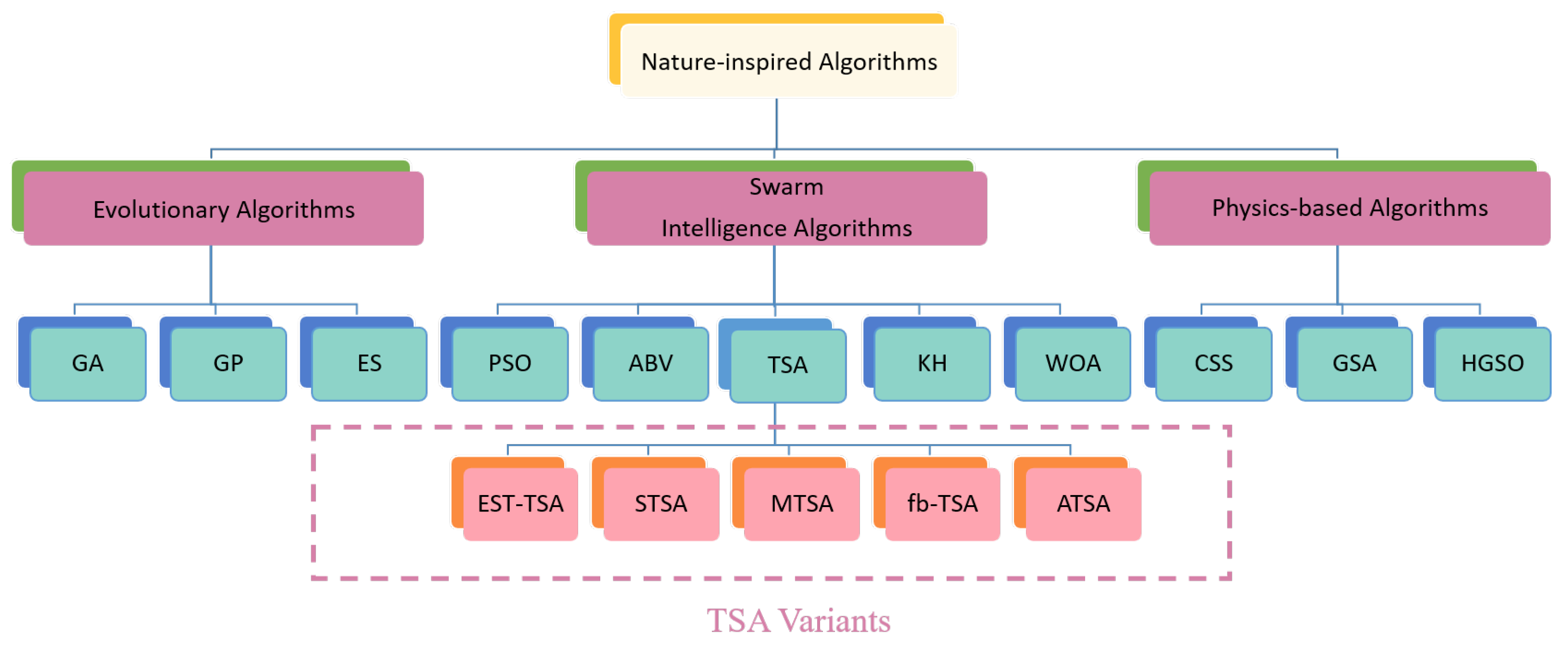
- Tree migration variants: The Migration Tree-Seed Algorithm (MTSA) incorporates hierarchical gravity learning and random-based migration, drawing inspiration from the Grey Wolf Optimizer [38]. This approach effectively mitigates challenges related to exploration–exploitation imbalance, local stagnation, and premature convergence. Additionally, the Triple Tree-Seed Algorithm (TriTSA) introduces triple learning-based mechanisms, amalgamating migration strategies with sine random distribution to further enhance algorithmic performance [47].
- Innovations in seed generation: Various innovations have emerged to enhance seed generation and improve the effectiveness of the optimization process. Jiang’s integration of the Sine Cosine Algorithm (SCA) with TSASC introduces a novel mechanism for updating seed positions, refining weight factors to pursue optimal solutions [48]. Additionally, the Sine Tree-Seed Algorithm (STSA) dynamically adjusts seed quantity, transitioning from higher to lower counts to emphasize output bolstering during initial search phases [42]. Other TSA variants like ITSA, incorporating an acceleration coefficient for faster updates [49], and EST-TSA, leveraging the current optimal population position for improved local search, make significant contributions [50]. Innovations such as fb-TSA [51], integrating seeds and search tendencies via feedback mechanisms [51], and LTSA, introducing a Lévy flight random walk strategy to seed position equations [52], collectively refine TSA’s performance and adaptability in optimization tasks.
- Algorithm applications: TSA and its various iterations are applied across a wide array of fields. For instance, CTSA is adept at handling constrained optimization problems by leveraging Deb’s rules for tree and seed selection [53]. Meanwhile, DTSA integrates swap, shift, and symmetry transformation operators to tackle permutation-coded optimization problems [54]. In financial risk assessment, Jiang introduces the sinhTSA-MLP model for identifying credit default risks with remarkable precision [55]. Moreover, in the medical domain, Aslan proposes the TSA-ANN structure for precise COVID-19 diagnosis, optimizing artificial neural networks to classify deep architectural features [56].
2.3. An Overview of PSO
3. Methods
3.1. PSO-Inspired Seed Generation Mechanism
3.2. Adaptive Velocity Adaptation Mechanism Based on Count Parameters
3.3. Population-Based Evolutionary Strategy with Information Exchange Mechanism
- Arithmetic crossover: This paper proposes a novel crossover strategy for trees based on the crossover strategy of Differential Evolution (DE). The update equations for the position and velocity of trees at the locations and , respectively, are defined as follows:where , , , and represent the positions and velocities of trees, as defined in Equations (11) and (12), and rand is a random number uniformly distributed in the range [0, 1].
- Natural selection: To expedite the convergence speed of trees, a mechanism is employed whereby well-performing trees replace less effective ones. The procedure is expressed as Equations (17) and (18):where , , , and represent the positions and velocities of trees as defined in Equation (12). This natural selection process involves the direct replacement of the position and velocity of less effective trees () with those of more effective trees (), significantly accelerating the convergence of trees.
3.4. DTSA: A Novel Tree-Seed Algorithm
3.5. Time Complexity Analysis of DTSA
| Algorithm 1 The pseudo-code of the DTSA |
|
4. Results and Discussion
4.1. Experiment Setting
4.2. Qualitative Analysis
4.2.1. Convergence Behavior Analysis
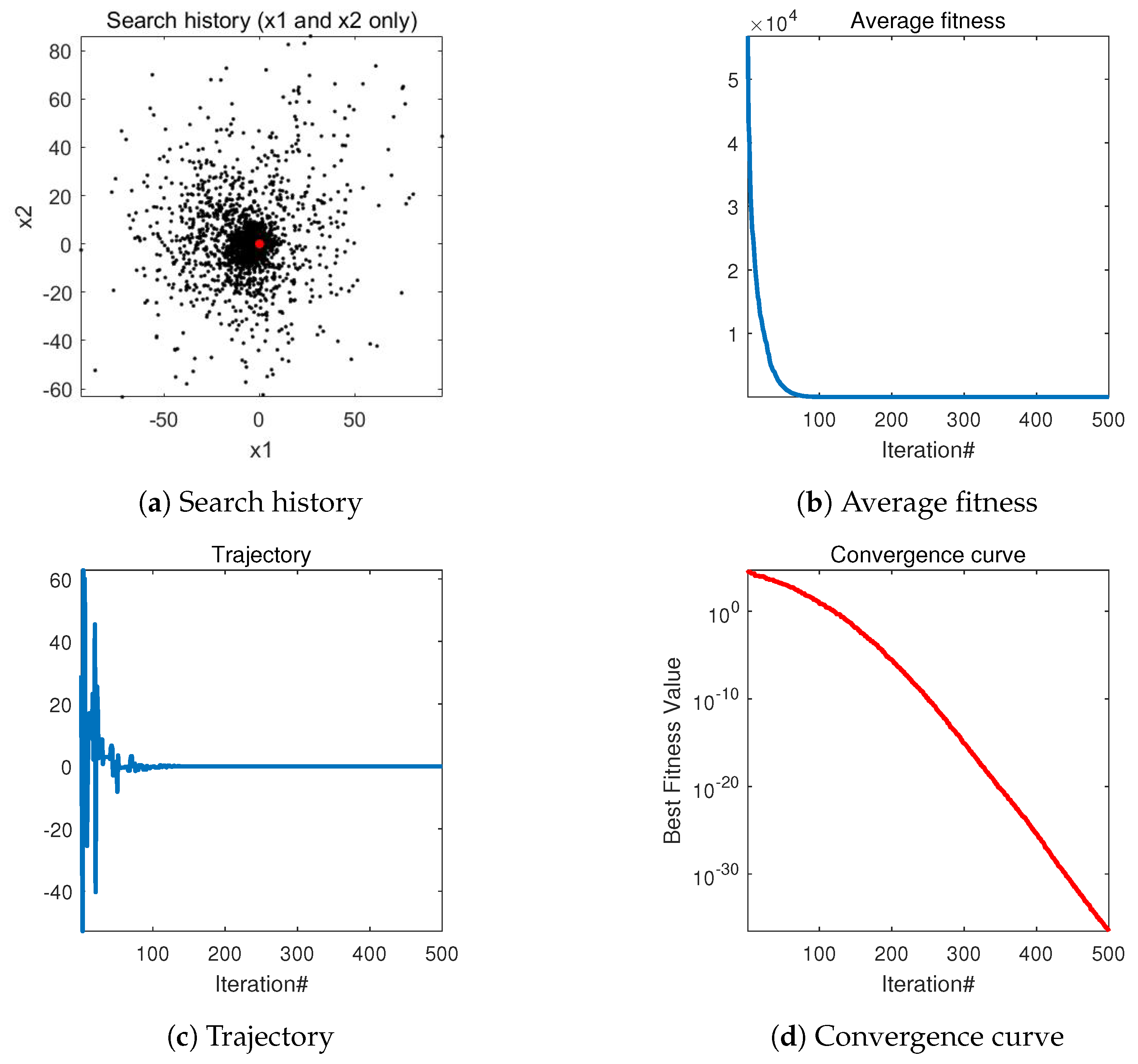
- The first image illustrates the optimization process of the DTSA algorithm. The black dots represent the areas covered by current seeds, while the red dot indicates the best position found, representing the optimal solution. The clustering of black dots around the red dot demonstrates the step-by-step optimization of DTSA towards convergence.
- The second figure depicts the convergence of DTSA, showcasing its rapid convergence towards the optimal solution. The sharp decline in the convergence curve underscores DTSA’s efficiency in finding optimal solutions.
- The third graph monitors changes in the first dimension, offering insights into the algorithm’s behavior and its avoidance of premature convergence to local optima. Empirical evidence suggests that the DTSA algorithm effectively navigates away from local optima.
- In the fourth graph, the convergence of the mean over multiple iterations is presented. The noticeable decline in the curve indicates the significant overall convergence effect of DTSA, further affirming its efficacy in optimization tasks.
4.2.2. Population Diversity Analysis
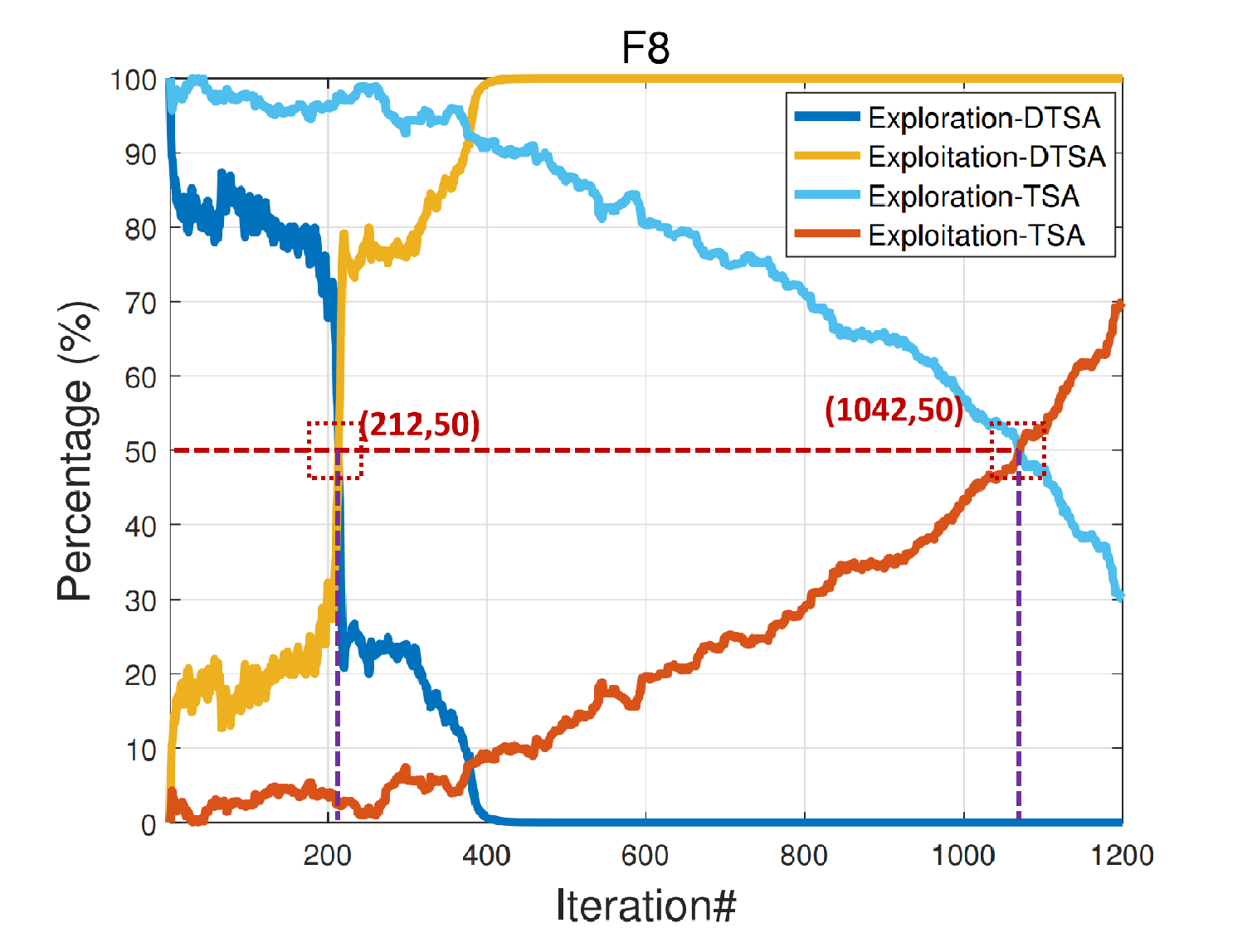
4.2.3. Exploration and Exploitation Analysis
4.3. Quantitative Analysis
4.3.1. Comparative Experiment 1: DTSA versus EST-TSA, fb-TSA, TSA, STSA, and MTSA
4.3.2. Comparative Experiment 2: DTSA versus Classical and Recent Swarm Intelligence Algorithms
4.3.3. Comparative Experiment 3: Analyzing the Stability of the DTSA
4.4. Further Analysis
4.5. Statistical Experiments
4.6. Practical Engineering Problems of Mathematical Modeling
4.6.1. Example 1: Tension Spring Design Problem

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DTSA | TSA | DBO | HHO | GWO | SO | WFO | GOA | |
|---|---|---|---|---|---|---|---|---|
| Best | 0.013 | 0.013 | 0.013 | 0.014 | 0.013 | 0.013 | 0.018 | 0.013 |
| Mean | 0.013 | 0.013 | 0.013 | 0.015 | 0.013 | 0.013 | 0.036 | 0.014 |
| Std | 0.000 | 0.000 | 0.000 | 0.001 | 0.000 | 0.000 | 0.026 | 0.001 |
| Worst | 0.000 | 0.013 | 0.013 | 0.016 | 0.013 | 0.013 | 0.054 | 0.015 |
| 0.053 | 0.053 | 0.050 | 0.060 | 0.050 | 0.050 | 0.068 | 0.058 | |
| 0.389 | 0.381 | 0.317 | 0.597 | 0.319 | 0.317 | 0.872 | 0.521 | |
| 9.602 | 10.015 | 14.028 | 4.426 | 13.918 | 14.028 | 2.439 | 5.648 |
4.6.2. Example 2: Three-Bar Truss Design Problem
| DTSA | TSA | DBO | HHO | GWO | SO | WFO | GOA | |
|---|---|---|---|---|---|---|---|---|
| Best | 263.8958 | 2.64 × | 263.8963 | 263.9051 | 263.8982 | 263.8959 | 265.4799 | 263.9054 |
| Mean | 263.8958 | 263.8958 | 263.8968 | 264.0205 | 263.9012 | 263.8969 | 265.5999 | 263.975 |
| Std | 2.81 × | 3.91 × | 7.95 × | 0.163226 | 4.28 × | 0.001494 | 0.169762 | 0.098407 |
| Worst | 2.64 × | 263.8959 | 263.8974 | 264.1359 | 263.9043 | 263.898 | 265.4799 | 264.0446 |
| 0.7886 | 0.7887 | 0.7879 | 0.7851 | 0.7895 | 0.7885 | 0.822665 | 0.785091 | |
| 0.4082 | 0.4081 | 0.4104 | 0.4182 | 0.4059 | 0.4087 | 0.3279 | 0.4184 |
4.6.3. Example 3: Welded Beam Design Problem
| DTSA | TSA | DBO | HHO | GWO | SO | WFO | GOA | |
|---|---|---|---|---|---|---|---|---|
| Best | 1.6927 | 1.6927 | 1.6927 | 1.7399 | 1.6954 | 1.6928 | 1.9850 | 2.3256 |
| Mean | 1.6927 | 1.6927 | 1.6927 | 1.7838 | 1.6957 | 1.6940 | 2.0007 | 2.6348 |
| Std | 0 | 1.03 × | 5.55 × | 0.0620 | 0.0004 | 0.001 | 0.02226 | 0.4372 |
| Worst | 1.6927 | 1.6927 | 1.6927 | 1.8276 | 1.6960 | 1.6951 | 2.0164 | 2.9439 |
| 0.2057 | 0.2057 | 0.2057 | 0.1877 | 0.2055 | 0.2057 | 0.24336 | 0.278417 | |
| 3.2349 | 3.2349 | 3.2349 | 3.5996 | 3.2416 | 3.2346 | 2.8060 | 3.1226 | |
| 9.0366 | 9.0366 | 9.0366 | 9.2250 | 9.0506 | 9.0372 | 8.5761 | 6.7455 | |
| 0.2057 | 0.2057 | 0.2057 | 0.2048 | 0.2056 | 0.2057 | 0.2597 | 0.3704 |
4.6.4. Example 4: Cantilever Beam Design Problem
| DTSA | TSA | DBO | HHO | GWO | SO | WFO | GOA | |
|---|---|---|---|---|---|---|---|---|
| Best | 1.3399 | 1.3399 | 1.3399 | 1.3437 | 1.3400 | 1.3400 | 2.6214 | 1.3737 |
| Mean | 1.3399 | 1.3399 | 1.3399 | 1.3440 | 1.3400 | 1.3400 | 2.6740 | 1.4063 |
| Std | 2.08 × | 7.40 × | 6.63 × | 0.0004 | 5.03 × | 2.11 × | 0.0743 | 0.0462 |
| Worst | 1.3399 | 1.3399 | 1.3399 | 1.3443 | 1.3401 | 1.3400 | 2.7266 | 1.4390 |
| 6.0161 | 6.0192 | 6.0354 | 5.8279 | 6.0266 | 5.9732 | 4.9741 | 5.9102 | |
| 5.3094 | 5.3085 | 5.3191 | 5.2299 | 5.2760 | 5.3042 | 16.3215 | 6.0045 | |
| 4.4947 | 4.4934 | 4.4922 | 4.8202 | 4.4834 | 4.5395 | 7.1959 | 3.9133 | |
| 3.5007 | 3.4994 | 3.4801 | 3.4528 | 3.5322 | 3.5006 | 10.6454 | 4.1481 | |
| 2.1525 | 2.1529 | 2.1471 | 2.2033 | 2.1565 | 2.1575 | 2.8738 | 2.0382 |
4.6.5. Example 5: Step-Cone Pulley Problem
| DTSA | TSA | DBO | HHO | GWO | SO | WFO | GOA | |
|---|---|---|---|---|---|---|---|---|
| Best | 1.67 × | 2.84 × | 1.67 × | 4.60 × | 4.31 × | 1.67 × | 6.77 × | 4.86 × |
| Mean | 1.67 × | 2.49 × | 1.75 × | 2.17 × | 8.53 × | 1.44 × | 1.03 × | 3.01 × |
| Std | 1.17 × | 3.51 × | 1.08 × | 3.07 × | 5.97 × | 2.03 × | 5.00 × | 4.25 × |
| Worst | 1.68 × | 4.97 × | 1.83 × | 4.34 × | 1.28 × | 2.87 × | 1.38 × | 6.01 × |
| 3.98 × | 3.91 × | 4.00 × | 3.97 × | 3.95 × | 3.89 × | 5.82 × | 3.89 × | |
| 5.47 × | 5.38 × | 5.50 × | 5.46 × | 5.44 × | 5.35 × | 5.98 × | 5.35 × | |
| 7.29 × | 7.17 × | 7.33 × | 7.28 × | 7.26 × | 7.14 × | 7.78 × | 7.14 × | |
| 8.75 × | 8.59 × | 8.79 × | 8.73 × | 8.70 × | 8.56 × | 8.23 × | 8.55 × | |
| 8.69 × | 8.92 × | 8.65 × | 8.73 × | 8.95 × | 8.99 × | 8.81 × | 8.92 × |
5. Conclusions and Future Work
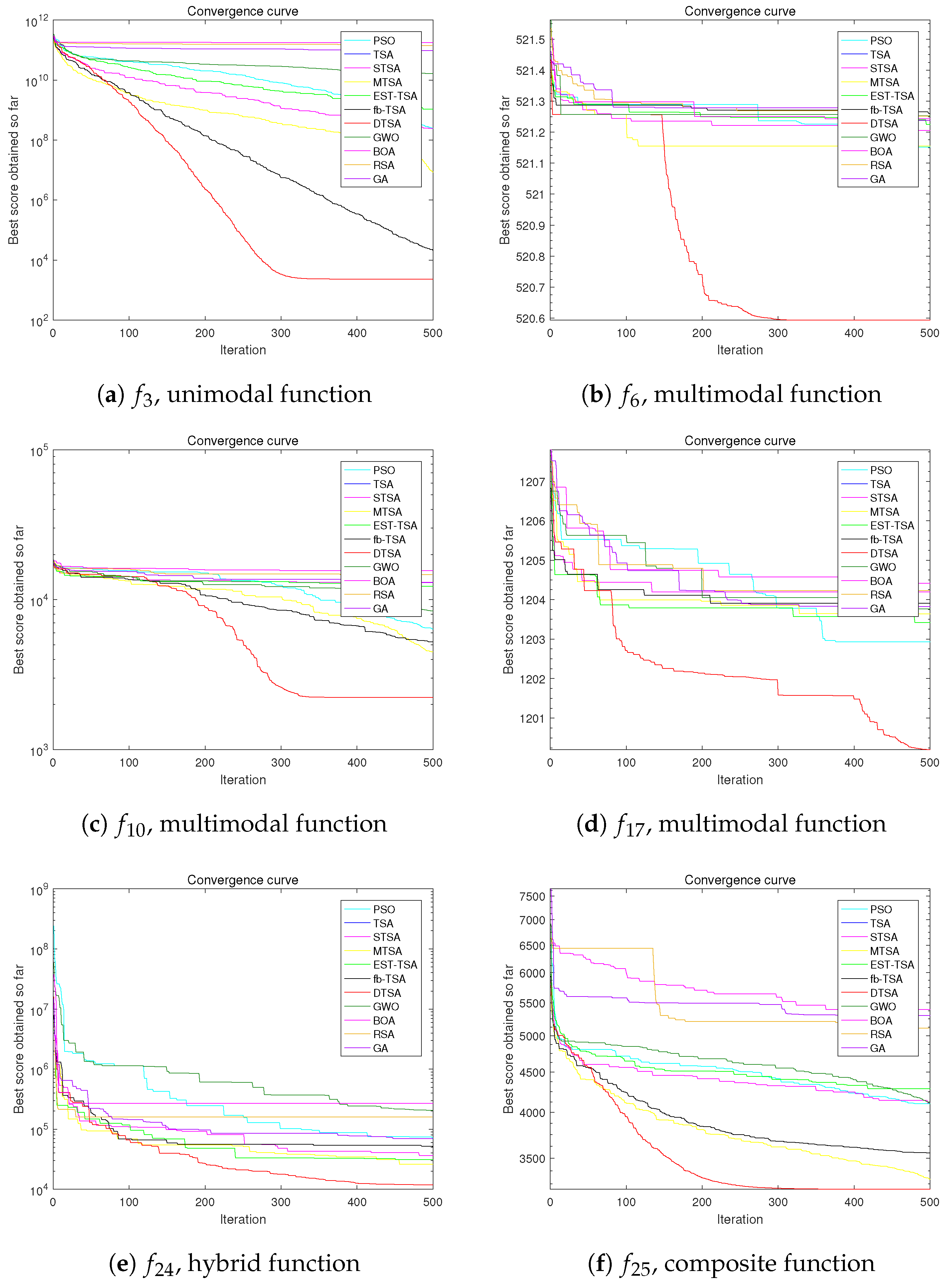
- Performance enhancement: DTSA was tested against various benchmarks and recent TSA variants such as STSA, EST-TSA, fb-TSA, and MTSA, along with established algorithms like GA, PSO, GWO, BA, and RSA. It consistently outperformed these algorithms across multiple dimensions (30D, 50D, 100D) and on different types of functions (unimodal, multimodal, composite), as shown in the IEEE CEC 2014 benchmark tests.
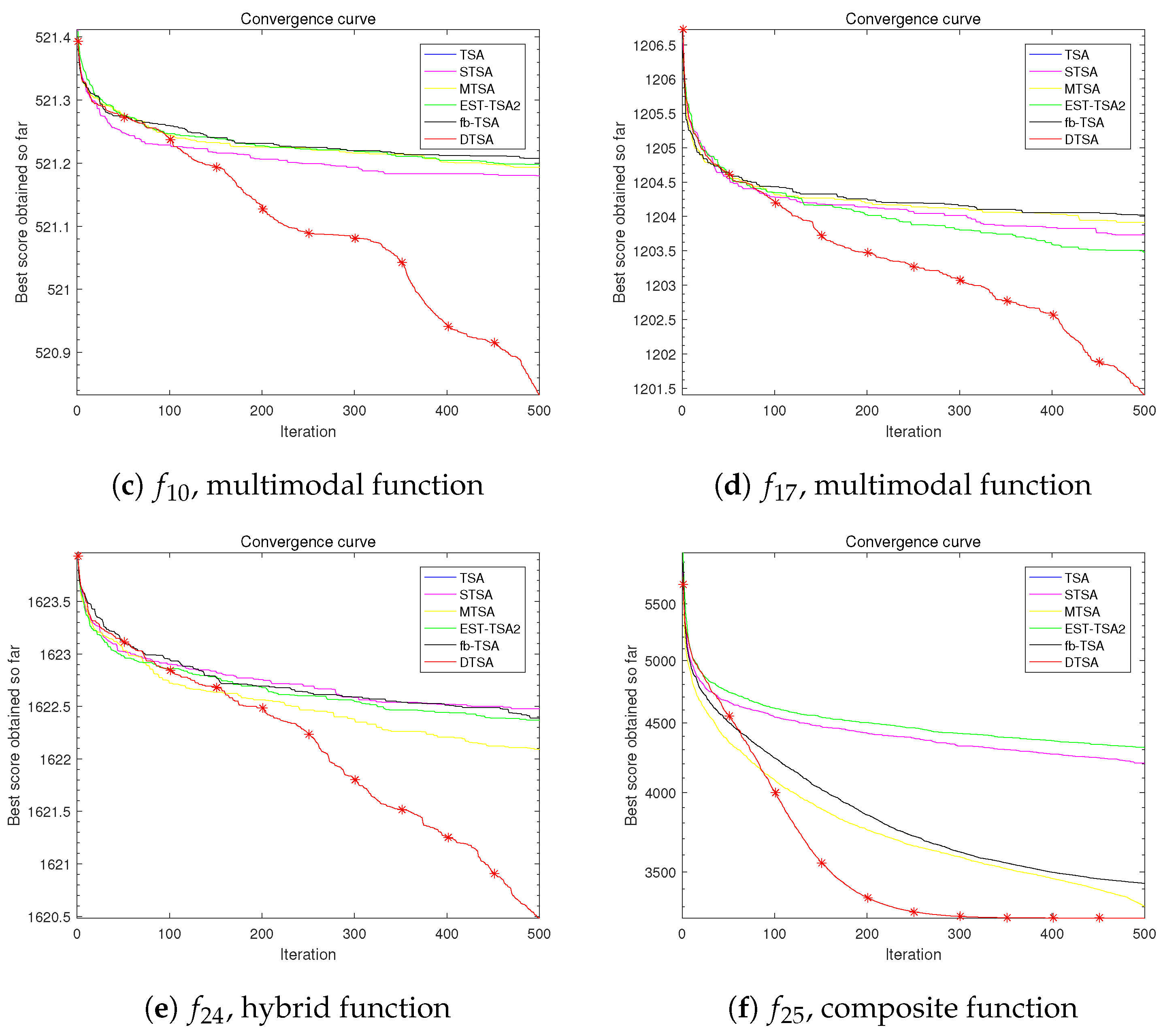
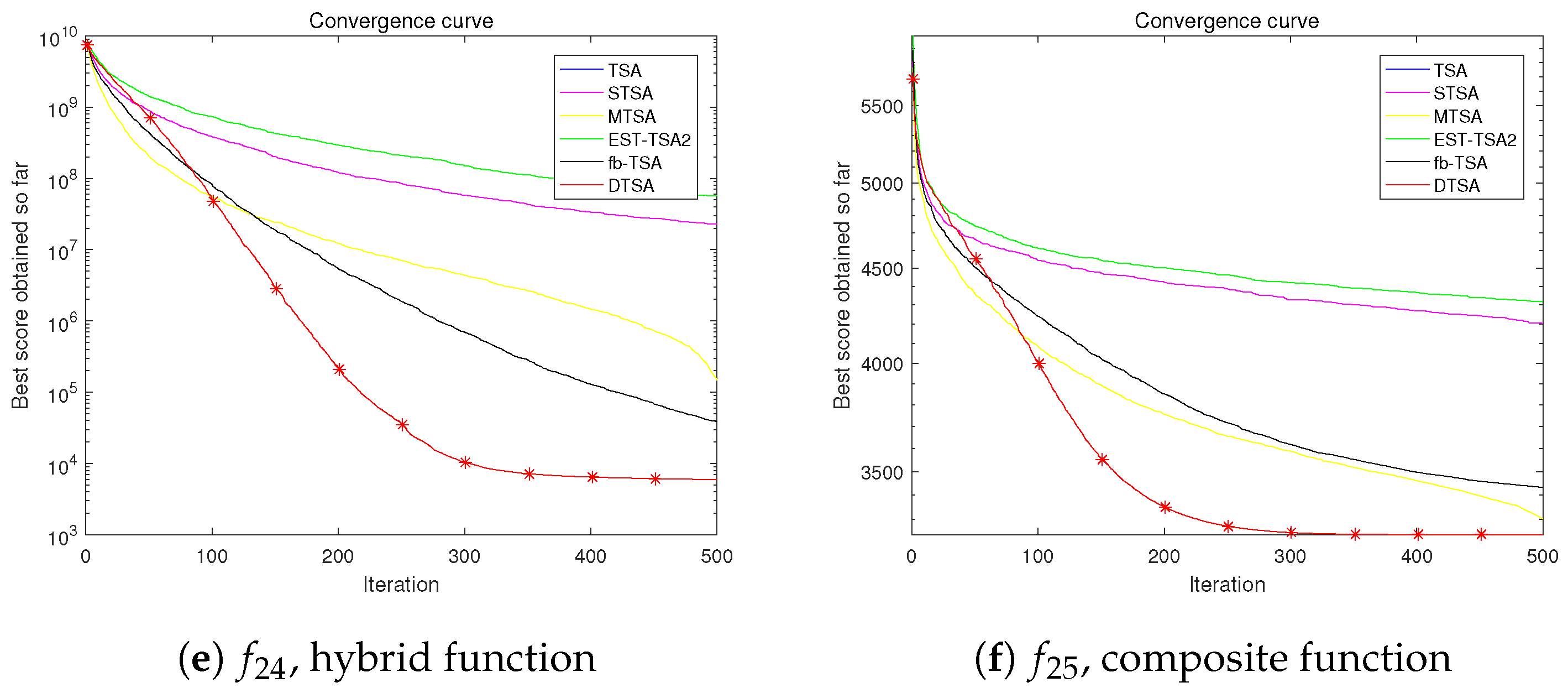
- Convergence and robustness: The convergence curves depicted in figures like Figure 17 illustrate DTSA’s faster convergence rate and stability even in higher dimensional spaces and for complex functions such as hybrid and composite ones. This indicates that DTSA effectively balances exploration and exploitation, leading to quicker and more accurate solutions.
- Statistical measures: Across experiments, DTSA’s performance was quantified using measures like best, mean, std (standard deviation), worst, and X (optimal solution configuration). These metrics provided a comprehensive view of its effectiveness, showing consistent superiority in finding optimal or near-optimal solutions with reduced variability.
- Engineering applications: When applied to real-world engineering problems like tension spring design, three-bar truss design, and others, DTSA achieved optimal values, as documented in Table 11, Table 12, Table 13, Table 14 and Table 15, indicating its practical utility and robustness in solving constrained optimization tasks.
6. Research Constraints and Considerations
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Homaifar, A.; Qi, C.X.; Lai, S.H. Constrained optimization via genetic algorithms. Simulation 1994, 62, 242–253. [Google Scholar] [CrossRef]
- Deb, K. An efficient constraint handling method for genetic algorithms. Comput. Methods Appl. Mech. Eng. 2000, 186, 311–338. [Google Scholar] [CrossRef]
- Liao, T.W. Two hybrid differential evolution algorithms for engineering design optimization. Appl. Soft Comput. 2010, 10, 1188–1199. [Google Scholar] [CrossRef]
- Yildiz, K.; Lesieutre, G.A. Sizing and prestress optimization of Class-2 tensegrity structures for space boom applications. Eng. Comput. 2022, 38, 1451–1464. [Google Scholar] [CrossRef]
- Osaba, E.; Villar-Rodriguez, E.; Del Ser, J.; Nebro, A.J.; Molina, D.; Latorre, A.; Suganthan, P.N.; Coello, C.A.C.; Herrera, L.E.F. A Tutorial On the design, experimentation and application of metaheuristic algorithms to real-World optimization problems. Swarm Evol. Comput. 2021, 64, 100888. [Google Scholar] [CrossRef]
- Tang, J.; Liu, G.; Pan, Q. A review on representative swarm intelligence algorithms for solving optimization problems: Applications and trends. IEEE/CAA J. Autom. Sin. 2021, 8, 1627–1643. [Google Scholar] [CrossRef]
- Tian, Y.; Si, L.; Zhang, X.; Cheng, R.; He, C.; Tan, K.C.; Jin, Y. Evolutionary large-scale multi-objective optimization: A survey. ACM Comput. Surv. (CSUR) 2021, 54, 1–34. [Google Scholar] [CrossRef]
- Lodi, A.; Martello, S.; Vigo, D. Heuristic and metaheuristic approaches for a class of two-dimensional bin packing problems. INFORMS J. Comput. 1999, 11, 345–357. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Hussain, K.; Mohd Salleh, M.N.; Cheng, S.; Shi, Y. Metaheuristic research: A comprehensive survey. Artif. Intell. Rev. 2019, 52, 2191–2233. [Google Scholar] [CrossRef]
- Gharehchopogh, F.S. Quantum-inspired metaheuristic algorithms: Comprehensive survey and classification. Artif. Intell. Rev. 2023, 56, 5479–5543. [Google Scholar] [CrossRef]
- Braik, M.; Sheta, A.; Al-Hiary, H. A novel meta-heuristic search algorithm for solving optimization problems: Capuchin search algorithm. Neural Comput. Appl. 2021, 33, 2515–2547. [Google Scholar] [CrossRef]
- Jiang, J.; Wu, J.; Luo, J.; Yang, X.; Huang, Z. MOBCA: Multi-Objective Besiege and Conquer Algorithm. Biomimetics 2024, 9, 316. [Google Scholar] [CrossRef] [PubMed]
- Parejo, J.A.; Ruiz-Cortés, A.; Lozano, S.; Fernandez, P. Metaheuristic optimization frameworks: A survey and benchmarking. Soft Comput. 2012, 16, 527–561. [Google Scholar] [CrossRef]
- Abualigah, L. Group search optimizer: A nature-inspired meta-heuristic optimization algorithm with its results, variants, and applications. Neural Comput. Appl. 2021, 33, 2949–2972. [Google Scholar] [CrossRef]
- Bai, J.; Jia, L.; Peng, Z. A new insight on augmented Lagrangian method with applications in machine learning. J. Sci. Comput. 2024, 99, 53. [Google Scholar] [CrossRef]
- Lin, Y.; Bian, Z.; Liu, X. Developing a dynamic neighborhood structure for an adaptive hybrid simulated annealing–tabu search algorithm to solve the symmetrical traveling salesman problem. Appl. Soft Comput. 2016, 49, 937–952. [Google Scholar] [CrossRef]
- Xue, X.; Chen, J. Using compact evolutionary tabu search algorithm for matching sensor ontologies. Swarm Evol. Comput. 2019, 48, 25–30. [Google Scholar] [CrossRef]
- Li, J.; Pardalos, P.M.; Sun, H.; Pei, J.; Zhang, Y. Iterated local search embedded adaptive neighborhood selection approach for the multi-depot vehicle routing problem with simultaneous deliveries and pickups. Expert Syst. Appl. 2015, 42, 3551–3561. [Google Scholar] [CrossRef]
- Derbel, H.; Jarboui, B.; Hanafi, S.; Chabchoub, H. Genetic algorithm with iterated local search for solving a location-routing problem. Expert Syst. Appl. 2012, 39, 2865–2871. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Robinson, B.A.; Hyman, J.M. Self-adaptive multimethod search for global optimization in real-parameter spaces. IEEE Trans. Evol. Comput. 2008, 13, 243–259. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.; Song, Y.; Zhao, H. Differential evolution algorithm with wavelet basis function and optimal mutation strategy for complex optimization problem. Appl. Soft Comput. 2021, 100, 106724. [Google Scholar] [CrossRef]
- Das, S.; Abraham, A.; Chakraborty, U.K.; Konar, A. Differential evolution using a neighborhood-based mutation operator. IEEE Trans. Evol. Comput. 2009, 13, 526–553. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Ji, G. A comprehensive survey on particle swarm optimization algorithm and its applications. Math. Probl. Eng. 2015, 2015, 931256. [Google Scholar] [CrossRef]
- Kıran, M.S.; Fındık, O. A directed artificial bee colony algorithm. Appl. Soft Comput. 2015, 26, 454–462. [Google Scholar] [CrossRef]
- Xue, Y.; Jiang, J.; Zhao, B.; Ma, T. A self-adaptive artificial bee colony algorithm based on global best for global optimization. Soft Comput. 2018, 22, 2935–2952. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Bolaji, A.L.; Al-Betar, M.A.; Awadallah, M.A.; Khader, A.T.; Abualigah, L.M. A comprehensive review: Krill Herd algorithm (KH) and its applications. Appl. Soft Comput. 2016, 49, 437–446. [Google Scholar] [CrossRef]
- Rashedi, E.; Rashedi, E.; Nezamabadi-Pour, H. A comprehensive survey on gravitational search algorithm. Swarm Evol. Comput. 2018, 41, 141–158. [Google Scholar] [CrossRef]
- Taradeh, M.; Mafarja, M.; Heidari, A.A.; Faris, H.; Aljarah, I.; Mirjalili, S.; Fujita, H. An evolutionary gravitational search-based feature selection. Inf. Sci. 2019, 497, 219–239. [Google Scholar] [CrossRef]
- MiarNaeimi, F.; Azizyan, G.; Rashki, M. Horse herd optimization algorithm: A nature-inspired algorithm for high-dimensional optimization problems. Knowl.-Based Syst. 2021, 213, 106711. [Google Scholar] [CrossRef]
- Kiran, M.S. TSA: Tree-seed algorithm for continuous optimization. Expert Syst. Appl. 2015, 42, 6686–6698. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; Hasanien, H.M. Tree-seed algorithm for solving optimal power flow problem in large-scale power systems incorporating validations and comparisons. Appl. Soft Comput. 2018, 64, 307–316. [Google Scholar] [CrossRef]
- Jiang, J.; Yang, X.; Li, M.; Chen, T. ATSA: An Adaptive Tree Seed Algorithm based on double-layer framework with tree migration and seed intelligent generation. Knowl.-Based Syst. 2023, 279, 110940. [Google Scholar] [CrossRef]
- Jiang, J.; Wu, J.; Meng, X.; Qian, L.; Luo, J.; Li, K. Katsa: Knn Ameliorated Tree-Seed Algorithm for Complex Optimization Problems. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4636664 (accessed on 1 June 2024).
- Jiang, J.; Meng, X.; Qian, L.; Wang, H. Enhance tree-seed algorithm using hierarchy mechanism for constrained optimization problems. Expert Syst. Appl. 2022, 209, 118311. [Google Scholar] [CrossRef]
- Beşkirli, M. Solving continuous optimization problems using the tree seed algorithm developed with the roulette wheel strategy. Expert Syst. Appl. 2021, 170, 114579. [Google Scholar] [CrossRef]
- Beşkirli, A.; Özdemir, D.; Temurtaş, H. A comparison of modified tree–seed algorithm for high-dimensional numerical functions. Neural Comput. Appl. 2020, 32, 6877–6911. [Google Scholar] [CrossRef]
- Caponetto, R.; Fortuna, L.; Fazzino, S.; Xibilia, M.G. Chaotic sequences to improve the performance of evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 289–304. [Google Scholar] [CrossRef]
- Jiang, J.; Xu, M.; Meng, X.; Li, K. STSA: A sine Tree-Seed Algorithm for complex continuous optimization problems. Phys. A Stat. Mech. Appl. 2020, 537, 122802. [Google Scholar] [CrossRef]
- Bajer, D.; Martinović, G.; Brest, J. A population initialization method for evolutionary algorithms based on clustering and Cauchy deviates. Expert Syst. Appl. 2016, 60, 294–310. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, L.; Qian, L.; Cheng, B.; Hou, W.; Zhuang, Y. Sine-SSA-BP ship trajectory prediction based on chaotic mapping improved sparrow search algorithm. Sensors 2023, 23, 704. [Google Scholar] [CrossRef] [PubMed]
- Beşkirli, M.; Kiran, M.S. Optimization of Butterworth and Bessel Filter Parameters with Improved Tree-Seed Algorithm. Biomimetics 2023, 8, 540. [Google Scholar] [CrossRef]
- Jiang, J.; Liu, Y.; Zhao, Z. TriTSA: Triple Tree-Seed Algorithm for dimensional continuous optimization and constrained engineering problems. Eng. Appl. Artif. Intell. 2021, 104, 104303. [Google Scholar] [CrossRef]
- Jiang, J.; Han, R.; Meng, X.; Li, K. TSASC: Tree–seed algorithm with sine–cosine enhancement for continuous optimization problems. Soft Comput. 2020, 24, 18627–18646. [Google Scholar] [CrossRef]
- Linden, A. ITSA: Stata Module to Perform Interrupted Time Series Analysis for Single and Multiple Groups. 2021. Available online: https://ideas.repec.org/c/boc/bocode/s457793.html (accessed on 1 June 2024).
- Jiang, J.; Jiang, S.; Meng, X.; Qiu, C. EST-TSA: An effective search tendency based to tree seed algorithm. Phys. A Stat. Mech. Appl. 2019, 534, 122323. [Google Scholar] [CrossRef]
- Jiang, J.; Meng, X.; Chen, Y.; Qiu, C.; Liu, Y.; Li, K. Enhancing tree-seed algorithm via feed-back mechanism for optimizing continuous problems. Appl. Soft Comput. 2020, 92, 106314. [Google Scholar] [CrossRef]
- Chen, X.; Przystupa, K.; Ye, Z.; Chen, F.; Wang, C.; Liu, J.; Gao, R.; Wei, M.; Kochan, O. Forecasting short-term electric load using extreme learning machine with improved tree seed algorithm based on Levy flight. Eksploat. I Niezawodn. 2022, 24, 153–162. [Google Scholar] [CrossRef]
- Babalik, A.; Cinar, A.C.; Kiran, M.S. A modification of tree-seed algorithm using Deb’s rules for constrained optimization. Appl. Soft Comput. 2018, 63, 289–305. [Google Scholar] [CrossRef]
- Kanna, S.R.; Sivakumar, K.; Lingaraj, N. Development of deer hunting linked earthworm optimization algorithm for solving large scale traveling salesman problem. Knowl.-Based Syst. 2021, 227, 107199. [Google Scholar] [CrossRef]
- Jiang, J.; Meng, X.; Liu, Y.; Wang, H. An enhanced TSA-MLP model for identifying credit default problems. SAGE Open 2022, 12, 21582440221094586. [Google Scholar] [CrossRef]
- Aslan, M.F.; Sabanci, K.; Ropelewska, E. A new approach to COVID-19 detection: An ANN proposal optimized through tree-seed algorithm. Symmetry 2022, 14, 1310. [Google Scholar] [CrossRef]
- Luo, X.; Chen, J.; Yuan, Y.; Wang, Z. Pseudo Gradient-Adjusted Particle Swarm Optimization for Accurate Adaptive Latent Factor Analysis. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2213–2226. [Google Scholar] [CrossRef]
- Ahmad, A.; Yadav, A.K.; Singh, A.; Singh, D.K.; Ağbulut, Ü. A hybrid RSM-GA-PSO approach on optimization of process intensification of linseed biodiesel synthesis using an ultrasonic reactor: Enhancing biodiesel properties and engine characteristics with ternary fuel blends. Energy 2024, 288, 129077. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Zamani, H.; Varzaneh, Z.A.; Sadiq, A.S.; Mirjalili, S. A Systematic Review of Applying Grey Wolf Optimizer, its Variants, and its Developments in Different Internet of Things Applications. Internet Things 2024, 26, 101135. [Google Scholar] [CrossRef]
- Yılmaz, S.; Küçüksille, E.U. A new modification approach on bat algorithm for solving optimization problems. Appl. Soft Comput. 2015, 28, 259–275. [Google Scholar] [CrossRef]
- Ekinci, S.; Izci, D.; Abu Zitar, R.; Alsoud, A.R.; Abualigah, L. Development of Lévy flight-based reptile search algorithm with local search ability for power systems engineering design problems. Neural Comput. Appl. 2022, 34, 20263–20283. [Google Scholar] [CrossRef]
- Ajani, O.S.; Kumar, A.; Mallipeddi, R. Covariance matrix adaptation evolution strategy based on correlated evolution paths with application to reinforcement learning. Expert Syst. Appl. 2024, 246, 123289. [Google Scholar] [CrossRef]
- Kocak, O.; Erkan, U.; Toktas, A.; Gao, S. PSO-based image encryption scheme using modular integrated logistic exponential map. Expert Syst. Appl. 2024, 237, 121452. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, J.S.; Zhu, J.H.; Zhang, X.Y.; Xing, Y.X.; Zhang, Y.H. MORSA: Multi-objective reptile search algorithm based on elite non-dominated sorting and grid indexing mechanism for wind farm layout optimization problem. Energy 2024, 293, 130771. [Google Scholar] [CrossRef]
- He, K.; Zhang, Y.; Wang, Y.K.; Zhou, R.H.; Zhang, H.Z. EABOA: Enhanced adaptive butterfly optimization algorithm for numerical optimization and engineering design problems. Alex. Eng. J. 2024, 87, 543–573. [Google Scholar] [CrossRef]
- Doğan, B.; Ölmez, T. A new metaheuristic for numerical function optimization: Vortex Search algorithm. Inf. Sci. 2015, 293, 125–145. [Google Scholar] [CrossRef]
- Askarzadeh, A. A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, Y.; Liu, J. Dimension by dimension dynamic sine cosine algorithm for global optimization problems. Appl. Soft Comput. 2021, 98, 106933. [Google Scholar] [CrossRef]
- Russo, I.L.; Bernardino, H.S.; Barbosa, H.J. Knowledge discovery in multiobjective optimization problems in engineering via Genetic Programming. Expert Syst. Appl. 2018, 99, 93–102. [Google Scholar] [CrossRef]
- Baghmisheh, M.V.; Peimani, M.; Sadeghi, M.H.; Ettefagh, M.M.; Tabrizi, A.F. A hybrid particle swarm–Nelder–Mead optimization method for crack detection in cantilever beams. Appl. Soft Comput. 2012, 12, 2217–2226. [Google Scholar] [CrossRef]
- Gupta, S.; Abderazek, H.; Yıldız, B.S.; Yildiz, A.R.; Mirjalili, S.; Sait, S.M. Comparison of metaheuristic optimization algorithms for solving constrained mechanical design optimization problems. Expert Syst. Appl. 2021, 183, 115351. [Google Scholar] [CrossRef]














| Algorithm | Parameter | Value |
|---|---|---|
| DTSA | ST | 0.1 |
| EST-TSA | ST | 0.1 |
| fb-TSA | ST | 0.1 |
| TSA | ST | 0.1 |
| STSA | ST | 0.1 |
| MTSA | ST | 0.1 |
| GWO | a | Linearly decreased from 2 to 0 |
| GA | Type Selection Crossover Mutation | Real coded Roulette wheel |
| BOA | p | 0.8 |
| RSA | Evolutionary Sense Sensitive parameter controlling the exploration accuracy Sensitive parameter controlling the exploitation accuracy | 0.05 0.1 |
| HHO | Range from [−1,1] 1.5 | |
| GOA | p Power exponent Sensory modality | Linearly decreased from 2 to 0 0.1 0.01 |
| DBO | Producers | 0.2 |
| WFO | Probability of laminar flow Probability of spiral flow in turbulent flow | 0.3 0.7 |
| SO | Threshold Threshold2 | 0.25 0.6 0.5 0.05 2 |
| Function Name | Function Details |
|---|---|
| High Conditioned Elliptic Function | |
| Bent Cigar Function | |
| Discus Function | |
| Rosenbrock’s Function | |
| Ackley’s Function | |
| Weierstrass Function | |
| Griewank’s Function | |
| Rastrigin’s Function | |
| Modified Schwefel’s Function | ; |
| Katsuura Function | |
| HappyCat Function | |
| HGBat Function | |
| Expanded Griewank’s plus Rosenbrock’s Function | |
| Expanded Scaffer’s F6 Function | ; |
| A. Unimodal Functions | |
| Rotated High Conditioned Elliptic Function | |
| Rotated Bent Cigar Function | |
| Rotated Discus Function | |
| B. Multimodal Functions | |
| Shifted and Rotated Rosenbrock’s Function | |
| Shifted and Rotated Ackley’s Function | |
| Shifted and Rotated Weierstrass Function | |
| Shifted and Rotated Griewank’s Function | |
| Shifted Rastrigin’s Function | |
| Shifted and Rotated Rastrigin’s Function | |
| Shifted Schwefel’s Function | |
| Shifted and Rotated Schwefel’s Function | |
| Shifted and Rotated Katsuura Function | |
| Shifted and Rotated HappyCat Function | |
| Shifted and Rotated HGBat Function | |
| Shifted and Rotated Expanded Griewank’s plus Rosenbrock’s Function | |
| Shifted and Rotated Expanded Scaffer’s F6 Function | |
| C. Hybrid Functions | |
| p = [0.3,0.3,0.4] | |
| p = [0.3,0.3,0.4] | |
| p = [0.2,0.2,0.3,0.3] | |
| p = [0.2,0.2,0.3,0.3] | |
| p = [0.1,0.2,0.2,0.2,0.3] | |
| p = [0.1,0.2,0.2,0.2,0.3] | |
| D. Composition Functions | |
| = [10,20,30,40,50] | |
| = [20,20,20] | |
| = [10,30,50] | |
| = [10,10,10,10,10] | |
| = [10,10,10,20,20] | |
| = [10,20,30,40,50] | |
| = [10,30,50] | |
| = [10,30,50] |
| Function | DTSA | EST-TSA | MTSA | STSA | TSA | fb-TSA |
|---|---|---|---|---|---|---|
| F1 | 1.8534 × | 6.6216 × | 5.6627 × | 5.2357 × | 1.0857 × | 9.2412 × |
| F2 | 5.3718 × | 9.5866 × | 1.9370 × | 2.8175 × | 3.1216 × | 2.9438 × |
| F3 | 5.3235 × | 3.3472 × | 3.6163 × | 1.0183 × | 3.9619 × | 1.9082 × |
| F4 | 4.4918 × | 6.2177 × | 4.8830 × | 2.8145 × | 6.9366 × | 4.4972 × |
| F5 | 5.2003 × | 5.2101 × | 5.2098 × | 5.2096 × | 5.2102 × | 5.2100 × |
| F6 | 6.0130 × | 6.2733 × | 6.0111 × | 6.3899 × | 6.2873 × | 6.0093 × |
| F7 | 7.0000 × | 7.0051 × | 7.0031 × | 9.5051 × | 7.0427 × | 7.0001 × |
| F8 | 8.2189 × | 9.9125 × | 8.2342 × | 1.0774 × | 9.8800 × | 8.2388 × |
| F9 | 9.2388 × | 1.1516 × | 1.0439 × | 1.2170 × | 1.1215 × | 9.7803 × |
| F10 | 1.3552 × | 5.5110 × | 1.7501 × | 7.6039 × | 6.7713 × | 2.7224 × |
| F11 | 3.6458 × | 7.5516 × | 8.0938 × | 8.4115 × | 8.3971 × | 6.5521 × |
| F12 | 1.2028 × | 1.2023 × | 1.2025 × | 1.2030 × | 1.2029 × | 1.2033 × |
| F13 | 1.3003 × | 1.3005 × | 1.3004 × | 1.3043 × | 1.3006 × | 1.3005 × |
| F14 | 1.4003 × | 1.4003 × | 1.4003 × | 1.4800 × | 1.4004 × | 1.4003 × |
| F15 | 1.5034 × | 1.5219 × | 1.5172 × | 1.7233 × | 1.5277 × | 1.5139 × |
| F16 | 1.6102 × | 1.6128 × | 1.6122 × | 1.6133 × | 1.6128 × | 1.6122 × |
| F17 | 2.3889 × | 1.3751 × | 5.7574 × | 1.8705 × | 1.8190 × | 4.2697 × |
| F18 | 1.8997 × | 2.1487 × | 4.5423 × | 1.2407 × | 2.1233 × | 1.9254 × |
| F19 | 1.9035 × | 1.9081 × | 1.9355 × | 2.0009 × | 1.9127 × | 1.9073 × |
| F20 | 4.6994 × | 2.2861 × | 7.6132 × | 4.6643 × | 1.7044 × | 1.2748 × |
| F21 | 1.2688 × | 4.7358 × | 1.5364 × | 3.0916 × | 4.3843 × | 2.0241 × |
| F22 | 2.4970 × | 2.7481 × | 2.3768 × | 3.2253 × | 2.7129 × | 2.4806 × |
| F23 | 2.6152 × | 2.6155 × | 2.6152 × | 2.7273 × | 2.6191 × | 2.6152 × |
| F24 | 2.6244 × | 2.6000 × | 2.6252 × | 2.6007 × | 2.6543 × | 2.6132 × |
| F25 | 2.7085 × | 2.7000 × | 2.7066 × | 2.7518 × | 2.7238 × | 2.7089 × |
| F26 | 2.7003 × | 2.7527 × | 2.7004 × | 2.7040 × | 2.7007 × | 2.7004 × |
| F27 | 3.0204 × | 3.3265 × | 3.1028 × | 3.9204 × | 3.2294 × | 3.0030 × |
| F28 | 3.6667 × | 4.0400 × | 3.6696 × | 5.5382 × | 4.0981 × | 3.7407 × |
| F29 | 3.9272 × | 7.2542 × | 4.0237 × | 2.4545 × | 1.7331 × | 4.0245 × |
| F30 | 4.5599 × | 2.3030 × | 4.9883 × | 4.8079 × | 2.1804 × | 4.7449 × |
| Rank first | 23 | 3 | 1 | 0 | 0 | 3 |
| Function | DTSA | EST-TSA | MTSA | STSA | TSA | fb-TSA |
|---|---|---|---|---|---|---|
| F1 | 3.9446 × | 3.9755 × | 1.4848 × | 2.3766 × | 4.3731 × | 1.8934 × |
| F2 | 4.0065 × | 9.7082 × | 7.8296 × | 1.1836 × | 8.9880 × | 4.8431 × |
| F3 | 7.4047 × | 1.1842 × | 6.6952 × | 2.7862 × | 1.1875 × | 9.0153 × |
| F4 | 5.2444 × | 1.4599 × | 5.2644 × | 3.4377 × | 1.9098 × | 5.2544 × |
| F5 | 5.2024 × | 5.2117 × | 5.2121 × | 5.2118 × | 5.2121 × | 5.2121 × |
| F6 | 6.0826 × | 6.5543 × | 6.1059 × | 6.7526 × | 6.5902 × | 6.2356 × |
| F7 | 7.0000 × | 7.0925 × | 7.0108 × | 1.8056 × | 7.8536 × | 7.0015 × |
| F8 | 8.5124 × | 1.2534 × | 8.9569 × | 1.4234 × | 1.2436 × | 8.8733 × |
| F9 | 9.5224 × | 1.3821 × | 1.0803 × | 1.6733 × | 1.3558 × | 1.0980 × |
| F10 | 3.2518 × | 1.1643 × | 3.9794 × | 1.4554 × | 1.2651 × | 4.9779 × |
| F11 | 5.6490 × | 1.3677 × | 1.4605 × | 1.5495 × | 1.4906 × | 1.3739 × |
| F12 | 1.2034 × | 1.2036 × | 1.2041 × | 1.2039 × | 1.2042 × | 1.2043 × |
| F13 | 1.3004 × | 1.3008 × | 1.3006 × | 1.3071 × | 1.3012 × | 1.3006 × |
| F14 | 1.4004 × | 1.4005 × | 1.4004 × | 1.7103 × | 1.4265 × | 1.4004 × |
| F15 | 1.5083 × | 5.0779 × | 1.5372 × | 6.6525 × | 4.9848 × | 1.5313 × |
| F16 | 1.6183 × | 1.6226 × | 1.6224 × | 1.6230 × | 1.6228 × | 1.6224 × |
| F17 | 1.0135 × | 1.3693 × | 1.0388 × | 1.5580 × | 2.0814 × | 1.0716 × |
| F18 | 2.1716 × | 3.6138 × | 3.1925 × | 2.5696 × | 1.0451 × | 2.5001 × |
| F19 | 1.9680 × | 1.9831 × | 1.9324 × | 2.3253 × | 1.9917 × | 1.9371 × |
| F20 | 6.8302 × | 4.2957 × | 1.5457 × | 2.7659 × | 4.8036 × | 3.7643 × |
| F21 | 4.4947 × | 8.5454 × | 2.2217 × | 4.0869 × | 7.2602 × | 1.0551 × |
| F22 | 3.1275 × | 3.6816 × | 3.6274 × | 5.2984 × | 3.9806 × | 3.7124 × |
| F23 | 2.6440 × | 2.5795 × | 2.6441 × | 3.4661 × | 2.6688 × | 2.6440 × |
| F24 | 2.6736 × | 2.6000 × | 2.6628 × | 2.8856 × | 2.7318 × | 2.6711 × |
| F25 | 2.7209 × | 2.7000 × | 2.7168 × | 2.9058 × | 2.7741 × | 2.7325 × |
| F26 | 2.7505 × | 2.8000 × | 2.7507 × | 2.7070 × | 2.7017 × | 2.8030 × |
| F27 | 3.1411 × | 4.2662 × | 3.3051 × | 4.8809 × | 4.4235 × | 3.5434 × |
| F28 | 4.2500 × | 6.3406 × | 4.1564 × | 8.8173 × | 6.0780 × | 4.8144 × |
| F29 | 4.3020 × | 1.4916 × | 7.1278 × | 2.3249 × | 7.0369 × | 4.3833 × |
| 30 | 1.6597 × | 1.4608 × | 1.9499 × | 3.2828 × | 2.6339 × | 2.0468 × |
| Rank first | 24 | 3 | 2 | 0 | 1 | 1 |
| Function | DTSA | EST-TSA | MTSA | STSA | TSA | fb-TSA |
|---|---|---|---|---|---|---|
| F1 | 5.7243 × | 1.4918 × | 1.2921 × | 1.1868 × | 3.1047 × | 2.2997 × |
| F2 | 7.6447 × | 6.2758 × | 2.6417 × | 4.6906 × | 8.1438 × | 1.9459 × |
| F3 | 2.8429 × | 3.0542 × | 2.1455 × | 7.8482 × | 3.4631 × | 3.0294 × |
| F4 | 7.7869 × | 1.0509 × | 8.7401 × | 1.5260 × | 1.3924 × | 1.0689 × |
| F5 | 5.2115 × | 5.2137 × | 5.2138 × | 5.2134 × | 5.2138 × | 5.2137 × |
| F6 | 6.4302 × | 7.3663 × | 6.6467 × | 7.6389 × | 7.4510 × | 6.7667 × |
| F7 | 7.0018 × | 1.2792 × | 7.0693 × | 5.0465 × | 1.5563 × | 7.1093 × |
| F8 | 9.7213 × | 1.9392 × | 1.1618 × | 2.6293 × | 1.9059 × | 1.1462 × |
| F9 | 1.0736 × | 2.1834 × | 1.7852 × | 2.9956 × | 2.0958 × | 1.5184 × |
| F10 | 7.0297 × | 2.9105 × | 1.8204 × | 3.2641 × | 3.0755 × | 1.4705 × |
| F11 | 1.4719 × | 3.0524 × | 3.1888 × | 3.2506 × | 3.2241 × | 3.1913 × |
| F12 | 1.2024 × | 1.2043 × | 1.2045 × | 1.2045 × | 1.2049 × | 1.2046 × |
| F13 | 1.3007 × | 1.3040 × | 1.3008 × | 1.3120 × | 1.3049 × | 1.3009 × |
| F14 | 1.4004 × | 1.5730 × | 1.4007 × | 2.7335 × | 1.6373 × | 1.4004 × |
| F15 | 1.5510 × | 4.8840 × | 1.6074 × | 2.1651 × | 1.2171 × | 2.0121 × |
| F16 | 1.6448 × | 1.6470 × | 1.6467 × | 1.6477 × | 1.6470 × | 1.6470 × |
| F17 | 3.6189 × | 1.6916 × | 1.6867 × | 1.1497 × | 2.7832 × | 3.9192 × |
| F18 | 2.3118 × | 4.0168 × | 5.9916 × | 2.5461 × | 2.0551 × | 3.0225 × |
| F19 | 2.0177 × | 2.2319 × | 2.0154 × | 5.9575 × | 2.3520 × | 2.0079 × |
| F20 | 3.5926 × | 2.5544 × | 8.3978 × | 3.2150 × | 3.0385 × | 2.0031 × |
| F21 | 2.6598 × | 6.2281 × | 7.2953 × | 4.8294 × | 1.0373 × | 7.2459 × |
| F22 | 4.0180 × | 6.9075 × | 5.2165 × | 9.8067 × | 6.7491 × | 6.9634 × |
| F23 | 2.6485 × | 2.5000 × | 2.6555 × | 5.9704 × | 2.9402 × | 2.6556 × |
| F24 | 2.7984 × | 2.6000 × | 2.7736 × | 3.9225 × | 3.0772 × | 2.8196 × |
| F25 | 2.7765 × | 2.7000 × | 2.7716 × | 3.8529 × | 3.0918 × | 2.7956 × |
| F26 | 2.8014 × | 2.8000 × | 2.8031 × | 2.7185 × | 3.0466 × | 2.8094 × |
| F27 | 3.9995 × | 6.3806 × | 4.5261 × | 7.4034 × | 6.5736 × | 5.0424 × |
| F28 | 6.3978 × | 2.2158 × | 7.0157 × | 2.2799 × | 1.9432 × | 1.2124 × |
| F29 | 6.7693 × | 4.9012 × | 1.2955 × | 1.5016 × | 1.6496 × | 1.8635 × |
| F30 | 3.7315 × | 3.2730 × | 1.5121 × | 6.5268 × | 7.2847 × | 1.1320 × |
| Rank first | 25 | 3 | 0 | 1 | 0 | 1 |
| Function | DTSA | TSA | STSA | MTSA | EST-TSA | fb-TSA | PSO | GWO | BOA | RSA | GA |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Unimodal functions | 1.65 × 10+6 | 9.39 × | 5.92 × | 5.92 × | 1.04 × | 8.07 × | 3.84 × | 1.32 × | 1.64 × | 1.05 × | 6.05 × |
| 5.80 × | 3.93 × | 2.63 × | 2.24 × | 3.10 × | 5.59 × | 4.42 × | 5.36 × | 7.75 × | 7.18 × | 3.62 × | |
| 4.48 × | 3.74 × | 8.66 × | 4.01 × | 3.94 × | 1.19 × | 3.29 × | 5.64 × | 7.61 × | 7.95 × | 7.14 × | |
| Simple multimodal functions | 5.00 × | 5.53 × | 2.89 × | 5.01 × | 5.91 × | 4.96 × | 6.44 × | 8.03 × | 1.64 × | 8.78 × | 5.48 × |
| 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | |
| 6.02 × | 6.23 × | 6.39 × | 6.03 × | 6.26 × | 6.03 × | 6.18 × | 6.19 × | 6.38 × | 6.40 × | 6.37 × | |
| 7.00 × | 7.00 × | 9.50 × | 7.00 × | 7.00 × | 7.00 × | 7.01 × | 7.54 × | 1.47 × | 1.30 × | 1.07 × | |
| 8.23 × | 9.68 × | 1.08 × | 8.31 × | 9.91 × | 8.37 × | 8.57 × | 9.10 × | 1.12 × | 1.16 × | 1.05 × | |
| 9.32 × | 1.11 × | 1.20 × | 9.75 × | 1.14 × | 9.77 × | 1.03 × | 1.04 × | 1.25 × | 1.24 × | 1.17 × | |
| 1.60 × | 6.28 × | 7.74 × | 1.96 × | 6.02 × | 2.20 × | 3.01 × | 4.51 × | 8.58 × | 7.92 × | 7.17 × | |
| 3.79 × | 8.18 × | 8.45 × | 7.49 × | 7.53 × | 7.80 × | 7.30 × | 5.81 × | 8.98 × | 8.81 × | 7.99 × | |
| 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | |
| 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.31 × | 1.31 × | 1.31 × | |
| 1.40 × | 1.40 × | 1.48 × | 1.40 × | 1.40 × | 1.40 × | 1.40 × | 1.42 × | 1.71 × | 1.57 × | 1.55 × | |
| 1.50 × | 1.52 × | 1.37 × | 1.52 × | 1.52 × | 1.51 × | 1.52 × | 2.36 × | 3.98 × | 2.0 × | 1.71 × | |
| 1.61 × | 1.61 × | 1.61 × | 1.61 × | 1.61 × | 1.61 × | 1.61 × | 1.61 × | 1.61 × | 1.61 × | 1.61 × | |
| Hybrid functions | 3.83 × 10+5 | 2.32 × | 1.50 × | 5.30 × | 2.04 × | 5.78 × | 2.60 × | 5.95 × | 1.91 × | 1.08 × | 3.38 × |
| 2.62 × | 2.32 × | 1.19 × | 2.81 × | 2.21 × | 2.22 × | 7.05 × | 1.97 × | 6.28 × | 4.51 × | 7.71 × | |
| 1.90 × | 1.91 × | 2.00 × | 1.91 × | 1.91 × | 1.91 × | 1.92 × | 1.94 × | 2.44 × | 2.25 × | 2.17 × | |
| 7.62 × | 1.62 × | 5.49 × | 7.66 × | 2.21 × | 1.44 × | 3.39 × | 5.10 × | 3.70 × | 1.60 × | 6.39 × | |
| 1.37 × 10+5 | 4.03 × | 3.14 × | 1.53 × | 4.84 × | 1.52 × | 4.80 × | 2.05 × | 5.24 × | 4.28 × | 7.92 × | |
| 2.41 × | 2.69 × | 3.24 × | 2.37 × | 2.68 × | 2.42 × | 2.60 × | 2.76 × | 3.48 × | 2.06 × | 3.53 × | |
| 2.62 × | 2.62 × | 2.72 × | 2.62 × | 2.60 × | 2.62 × | 2.62 × | 2.65 × | 2.50 × | 2.50 × | 2.79 × | |
| Composition functions | 2.63 × | 2.63 × | 2.60 × | 2.62 × | 2.60 × | 2.63 × | 2.64 × | 2.60 × | 2.60 × | 2.60 × | 2.62 × |
| 2.71 × | 2.72 × | 2.75 × | 2.71 × | 2.70 × | 2.71 × | 2.71 × | 2.70 × | 2.70 × | 2.70 × | 2.71 × | |
| 2.70 × | 2.70 × | 2.70 × | 2.71 × | 2.77 × | 2.70 × | 2.74 × | 2.72 × | 2.77 × | 2.80 × | 2.72 × | |
| 3.04 × | 3.22 × | 3.72 × | 3.06 × | 3.30 × | 3.06 × | 3.40 × | 3.55 × | 3.56 × | 4.20 × | 3.74 × | |
| 3.71 × | 4.04 × | 5.29 × | 3.67 × | 4.09 × | 3.71 × | 4.65 × | 3.35 × | 5.84 × | 5.73 × | 8.72 × | |
| 3.97 × | 4.06 × | 2.32 × | 3.97 × | 4.84 × | 3.94 × | 4.42 × | 3.11 × | 9.16 × | 1.63 × | 2.98 × | |
| 4.51 × | 1.27 × | 4.00 × | 4.99 × | 1.84 × | 5.07 × | 1.99 × | 3.56 × | 3.51 × | 2.49 × | 1.37 × | |
| Ranking first | 20 | 0 | 0 | 1 | 1 | 2 | 0 | 3 | 2 | 1 | 0 |
| Function | DTSA | TSA | STSA | MTSA | EST-TSA | fb-TSA | PSO | GWO | BOA | RSA | GA |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Unimodal functions | 3.06 × 10+6 | 3.56× | 2.35× | 8.95× | 2.99× | 4.43× | 9.03× | 4.72× | 5.45× | 2.93× | 2.43× |
| 2.34 × | 2.45 × | 1.15 × | 8.51 × | 1.07 × | 2.10 × | 2.44 × | 1.66 × | 1.79 × | 1.40 × | 9.68 × | |
| 1.36 × 10+4 | 1.19 × | 2.98 × | 7.72 × | 1.10 × | 1.33 × | 1.45 × | 1.66 × | 1.99 × | 1.48 × | 1.43 × | |
| Simple multimodal functions | 5.15 × | 8.83 × | 2.84 × | 5.40 × | 1.26 × | 5.36 × | 7.50 × | 2.91 × | 5.13 × | 2.51 × | 2.33 × |
| 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | |
| 6.07 × | 6.54 × | 6.74 × | 6.08 × | 6.54 × | 6.16 × | 6.42 × | 6.39 × | 6.68 × | 6.75 × | 6.68 × | |
| 7.00 × | 7.02 × | 1.81 × | 7.01 × | 7.12 × | 7.00 × | 7.04 × | 9.23 × | 2.30 × | 1.90 × | 1.64 × | |
| 8.50 × | 1.21 × | 1.44 × | 8.83 × | 1.23 × | 8.98 × | 9.26 × | 1.05 × | 1.43 × | 1.48 × | 1.28 × | |
| 9.74 × | 1.37 × | 1.65 × | 1.09 × | 1.40 × | 1.15 × | 1.16 × | 1.21 × | 1.60 × | 1.61 × | 1.56 × | |
| 2.24 × | 1.30 × | 1.51 × | 4.48 × | 1.23 × | 5.23 × | 6.37 × | 8.41 × | 1.56 × | 1.47 × | 1.30 × | |
| 5.32 × | 1.45 × | 1.53 × | 1.45 × | 1.41 × | 1.48 × | 1.23 × | 8.52 × | 1.59 × | 1.53 × | 1.43 × | |
| 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | |
| 1.30 × | 1.30 × | 1.31 × | 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.31 × | 1.31 × | 1.31 × | |
| 1.40 × | 1.40 × | 1.70 × | 1.40 × | 1.40 × | 1.40 × | 1.40 × | 1.46 × | 1.81 × | 1.72 × | 1.63 × | |
| 1.51 × | 1.78 × | 3.09 × | 1.54 × | 3.46 × | 1.53 × | 1.57 × | 7.03 × | 5.77 × | 1.72 × | 5.12 × | |
| 1.62 × | 1.62 × | 1.62 × | 1.62 × | 1.62 × | 1.62 × | 1.62 × | 1.62 × | 1.62 × | 1.62 × | 1.62 × | |
| Hybrid functions | 5.27 × 10+5 | 1.56 × | 1.14 × | 2.27 × | 2.45 × | 1.76 × | 1.31 × | 1.85 × | 9.37 × | 3.85 × | 1.75 × |
| 2.29 × | 2.76 × | 2.35 × | 2.49 × | 3.00 × | 2.13 × | 2.30 × | 4.37 × | 2.46 × | 1.05 × | 5.29 × | |
| 1.93 × | 1.98 × | 2.34 × | 1.95 × | 1.99 × | 1.92 × | 1.97 × | 2.03 × | 6.52 × | 4.17 × | 2.70 × | |
| 1.18 × | 3.66 × | 4.29 × | 2.61 × | 3.11 × | 5.02 × | 7.18 × | 2.05 × | 2.71 × | 1.60 × | 6.96 × | |
| 1.20 × 10+6 | 6.05 × | 3.83 × | 1.51 × | 4.30 × | 5.56 × 10+5 | 8.61 × | 7.82 × | 1.07 × | 5.64 × | 1.90 × | |
| 2.82 × | 3.94 × | 5.23 × | 3.01 × | 3.92 × | 3.34 × | 3.95 × | 3.53 × | 6.75 × | 1.21 × | 7.32 × | |
| 2.64 × | 2.65 × | 3.38 × | 2.64 × | 2.58 × | 2.64 × | 2.66 × | 2.83 × | 2.50 × | 2.50 × | 2.89 × | |
| Composition functions | 2.67 × | 2.70 × | 2.91 × | 2.67 × | 2.60 × | 2.67 × | 2.70 × | 2.64 × | 2.60 × | 2.60 × | 2.66 × |
| 2.72 × | 2.78 × | 2.87 × | 2.71 × | 2.70 × | 2.72 × | 2.73 × | 2.71 × | 2.70 × | 2.70 × | 2.71 × | |
| 2.80 × | 2.77 × | 2.71 × | 2.80 × | 2.80 × | 2.75 × | 2.90 × | 2.86 × | 2.80 × | 2.80 × | 2.80 × | |
| 3.20 × | 4.11 × | 4.98 × | 3.29 × | 4.29 × | 3.56 × | 4.10 × | 4.11 × | 5.40 × | 5.11 × | 5.31 × | |
| 4.16 × | 5.70 × | 9.86 × | 4.24 × | 8.31 × | 4.33 × | 6.48 × | 3.51 × | 1.48 × | 1.20 × | 1.59 × | |
| 3.70 × | 8.68 × | 2.99 × | 6.75 × | 1.57 × | 5.16 × | 1.12 × | 3.12 × | 3.10 × | 3.10 × | 1.09 × | |
| 1.33 × | 1.40 × | 3.19 × | 1.84 × | 2.08 × | 1.68 × | 1.88 × | 4.41 × | 6.83 × | 2.20 × | 2.03 × | |
| Ranking first | 20 | 0 | 1 | 0 | 1 | 3 | 0 | 2 | 3 | 3 | 0 |
| Function | DTSA | TSA | STSA | MTSA | EST-TSA | fb-TSA | PSO | GWO | BOA | RSA | GA |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Unimodal functions | 5.87 × | 2.42 × | 1.17 × | 1.34 × | 1.55 × | 2.15 × | 5.60 × | 9.18 × | 1.08 × | 7.88 × | 3.90 × |
| 7.81 × 10+4 | 5.33 × | 4.67 × | 4.47 × | 6.23 × | 1.02 × | 1.09 × | 9.34 × | 3.12 × | 2.79 × | 2.16 × | |
| 2.63 × 10+4 | 3.46 × | 8.09 × | 2.14 × | 2.85 × | 3.23 × | 4.46 × | 3.42 × | 3.23 × | 3.08 × | 2.85 × | |
| Simple multimodal functions | 7.81 × | 9.36 × | 1.59 × | 9.20 × | 1.12 × | 1.05 × | 2.27 × | 1.11 × | 1.07 × | 8.06 × | 5.35 × |
| 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | 5.21 × | |
| 6.48 × | 7.42 × | 7.63 × | 6.59 × | 7.38 × | 6.83 × | 7.08 × | 7.08 × | 7.57 × | 7.58 × | 7.50 × | |
| 7.00 × | 1.17 × | 4.98 × | 7.06 × | 1.29 × | 7.11 × | 7.85 × | 1.65 × | 3.83 × | 3.47 × | 2.92 × | |
| 9.55 × | 1.89 × | 2.57 × | 1.17 × | 1.94 × | 1.19 × | 1.34 × | 1.58 × | 2.15 × | 2.27 × | 2.02 × | |
| 1.10 × | 2.11 × | 3.01 × | 1.79 × | 2.21 × | 1.52 × | 1.85 × | 1.70 × | 2.39 × | 2.38 × | 2.26 × | |
| 7.42 × | 2.99 × | 3.29 × | 1.71 × | 2.93 × | 1.90 × | 1.77 × | 2.01 × | 3.30 × | 3.07 × | 3.08 × | |
| 1.61 × 10+4 | 3.21 × | 3.28 × | 3.19 × | 2.94 × | 3.20 × | 3.12 × | 2.78 × | 3.26 × | 3.14 × | 3.05 × | |
| 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.20 × | 1.21 × | 1.20 × | |
| 1.30 × | 1.30 × | 1.31 × | 1.30 × | 1.30 × | 1.30 × | 1.30 × | 1.31 × | 1.31 × | 1.31 × | 1.31 × | |
| 1.40 × | 1.54 × | 2.63 × | 1.40 × | 1.58 × | 1.40 × | 1.43 × | 1.65 × | 2.34 × | 2.22 × | 2.05 × | |
| 1.55 × | 6.26 × | 2.15 × | 1.61 × | 4.66 × | 1.77 × | 1.62 × | 2.75 × | 3.05 × | 1.34 × | 4.49 × | |
| 1.65 × | 1.65 × | 1.65 × | 1.65 × | 1.65 × | 1.65 × | 1.65 × | 1.65 × | 1.65 × | 1.65 × | 1.65 × | |
| Hybrid functions | 5.02 × 10+6 | 2.22 × | 1.15 × | 1.18 × | 1.68 × | 2.55 × | 8.84 × | 1.07 × | 2.05 × | 1.27 × | 7.33 × |
| 2.45 × | 2.98 × | 2.16 × | 4.69 × | 5.14 × 10+4 | 2.99 × | 2.09 × | 2.35 × | 4.47 × | 3.22 × | 2.16 × | |
| 2.00 × | 2.15 × | 6.32 × | 2.01 × | 2.24 × | 2.03 × | 2.15 × | 2.57 × | 1.29 × | 8.82 × | 5.74 × | |
| 5.05 × 10+4 | 2.70 × | 4.24 × | 1.14 × | 2.35 × | 1.89 × | 2.96 × | 2.89 × | 1.40 × | 8.38 × | 4.30 × | |
| 3.33 × 10+6 | 8.85 × | 5.02 × | 6.83 × | 5.72 × | 9.40 × | 3.75 × | 4.44 × | 7.12 × | 3.97 × | 1.83 × | |
| 4.22 × | 7.12 × | 1.07 × | 6.66 × | 6.75 × | 6.68 × | 6.24 × | 5.96 × | 4.27 × | 1.45 × | 1.88 × | |
| 2.65 × | 2.77 × | 5.89 × | 2.66 × | 2.50 × | 2.66 × | 2.72 × | 3.12 × | 2.50 × | 2.50 × | 3.14 × | |
| Composition functions | 2.79 × | 3.00 × | 3.93 × | 2.78 × | 2.60 × | 2.82 × | 2.92 × | 2.60 × | 2.60 × | 2.60 × | 2.75 × |
| 2.78 × | 3.06 × | 3.85 × | 2.77 × | 2.70 × | 2.81 × | 2.86 × | 2.74 × | 2.70 × | 2.70 × | 2.73 × | |
| 2.80 × | 2.99 × | 2.72 × | 2.80 × | 2.80 × | 2.81 × | 2.85 × | 2.86 × | 2.80 × | 2.80 × | 2.80 × | |
| 4.02 × | 6.42 × | 7.46 × | 4.45 × | 6.45 × | 4.93 × | 5.79 × | 5.94 × | 7.99 × | 7.57 × | 8.41 × | |
| 6.49 × | 2.13 × | 2.30 × | 8.19 × | 2.18 × | 1.02 × | 1.43 × | 5.37 × | 3.00 × | 2.29 × | 3.56 × | |
| 5.73 × | 2.50 × | 1.43 × | 1.63 × | 4.53 × | 2.73 × | 4.56 × | 3.14 × | 3.10 × | 3.10 × | 2.13 × | |
| 5.56 × | 2.65 × | 5.64 × | 1.46 × | 4.23 × | 1.97 × | 8.55 × | 6.14 × | 3.36 × | 3.63 × | 1.28 × | |
| Ranking first | 23 | 0 | 1 | 0 | 2 | 0 | 0 | 2 | 3 | 4 | 0 |
| Algorithms | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| TSA | STSA | MTSA | EST-TSA | fb-TSA | PSO | GWO | BOA | RSA | GA | |
| D = 30 | 1.13 × | 3.18 × | 4.68 × | 1.60 × | 1.29 × | 1.73 × | 8.31 × | 1.24 × | 1.24 × | 3.52 × |
| TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | |
| D = 50 | 4.29 × | 3.18 × | 1.36 × | 4.45 × | 2.11 × | 1.73 × | 5.71 × | 5.31 × | 4.86 × | 6.34 × |
| TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | |
| D = 100 | 1.73 × | 2.88 × | 1.2 × | 2.60 × | 1.73 × | 1.73 × | 7.16 × | 6.32 × | 6.32 × | 6.34 × |
| TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | |
| Algorithms | ||||||||||
| D = 30 | 1.13 × | 3.18 × | 4.68 × | 1.60 × | 1.29 × | 1.73 × | 8.31 × | 1.24 × | 1.24 × | 3.52 × |
| TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | |
| D = 50 | 4.29 × | 3.18 × | 1.36 × | 4.45 × | 2.11 × | 1.73 × | 5.71 × | 5.31 × | 4.86 × | 6.34 × |
| TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | |
| D = 100 | 1.73 × | 2.88 × | 1.2 × | 2.60 × | 1.73 × | 1.73 × | 7.16 × | 6.32 × | 6.32 × | 6.34 × |
| TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | TRUE | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, J.; Huang, J.; Wu, J.; Luo, J.; Yang, X.; Li, W. DTSA: Dynamic Tree-Seed Algorithm with Velocity-Driven Seed Generation and Count-Based Adaptive Strategies. Symmetry 2024, 16, 795. https://doi.org/10.3390/sym16070795
Jiang J, Huang J, Wu J, Luo J, Yang X, Li W. DTSA: Dynamic Tree-Seed Algorithm with Velocity-Driven Seed Generation and Count-Based Adaptive Strategies. Symmetry. 2024; 16(7):795. https://doi.org/10.3390/sym16070795
Chicago/Turabian StyleJiang, Jianhua, Jiansheng Huang, Jiaqi Wu, Jinmeng Luo, Xi Yang, and Weihua Li. 2024. "DTSA: Dynamic Tree-Seed Algorithm with Velocity-Driven Seed Generation and Count-Based Adaptive Strategies" Symmetry 16, no. 7: 795. https://doi.org/10.3390/sym16070795
APA StyleJiang, J., Huang, J., Wu, J., Luo, J., Yang, X., & Li, W. (2024). DTSA: Dynamic Tree-Seed Algorithm with Velocity-Driven Seed Generation and Count-Based Adaptive Strategies. Symmetry, 16(7), 795. https://doi.org/10.3390/sym16070795