

Research on Mathematical Modeling of Critical Impact Force and Rollover Velocity of Coach Tripped Rollover Based on Numerical Analysis Method

Abstract
1. Introduction
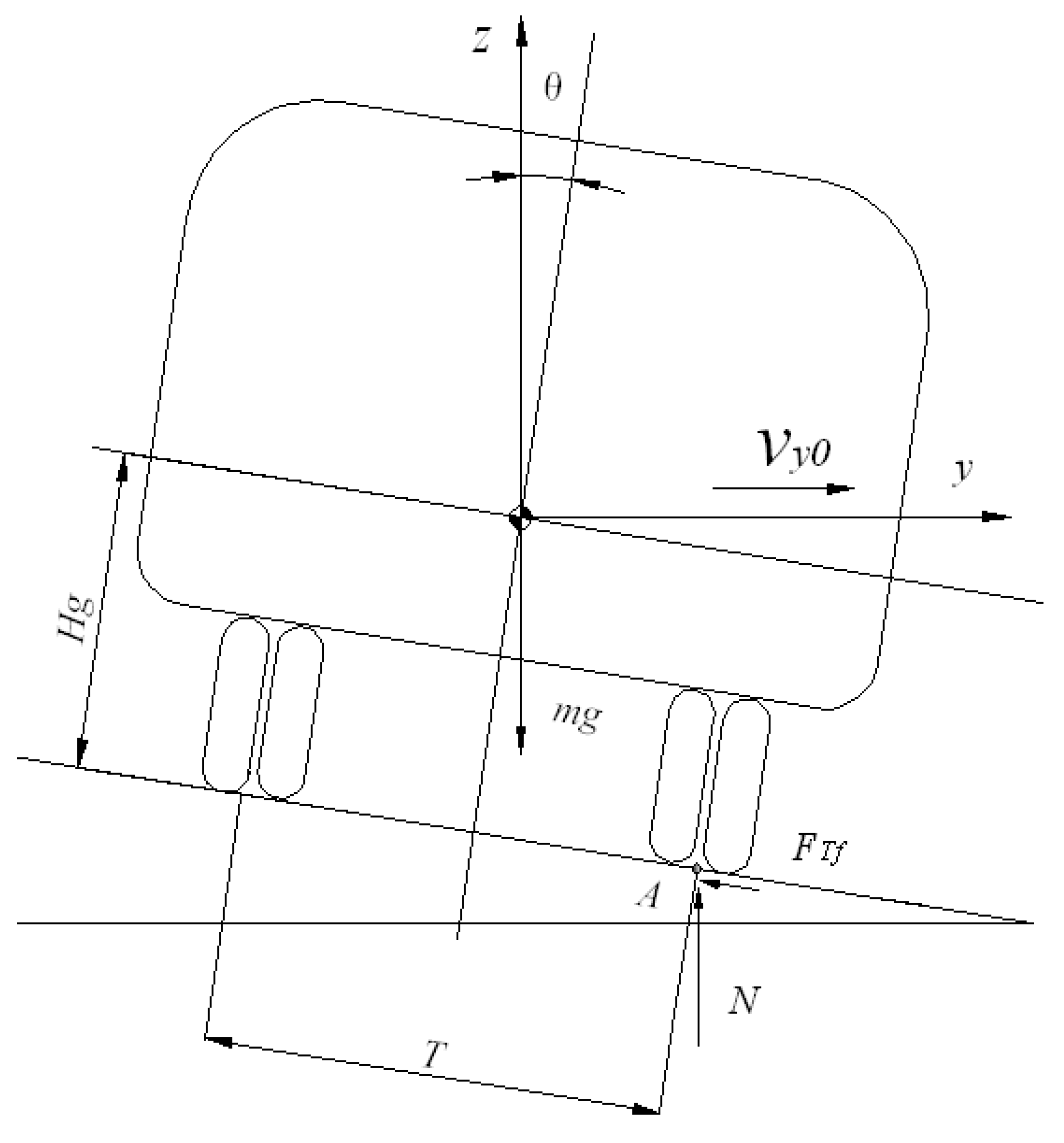
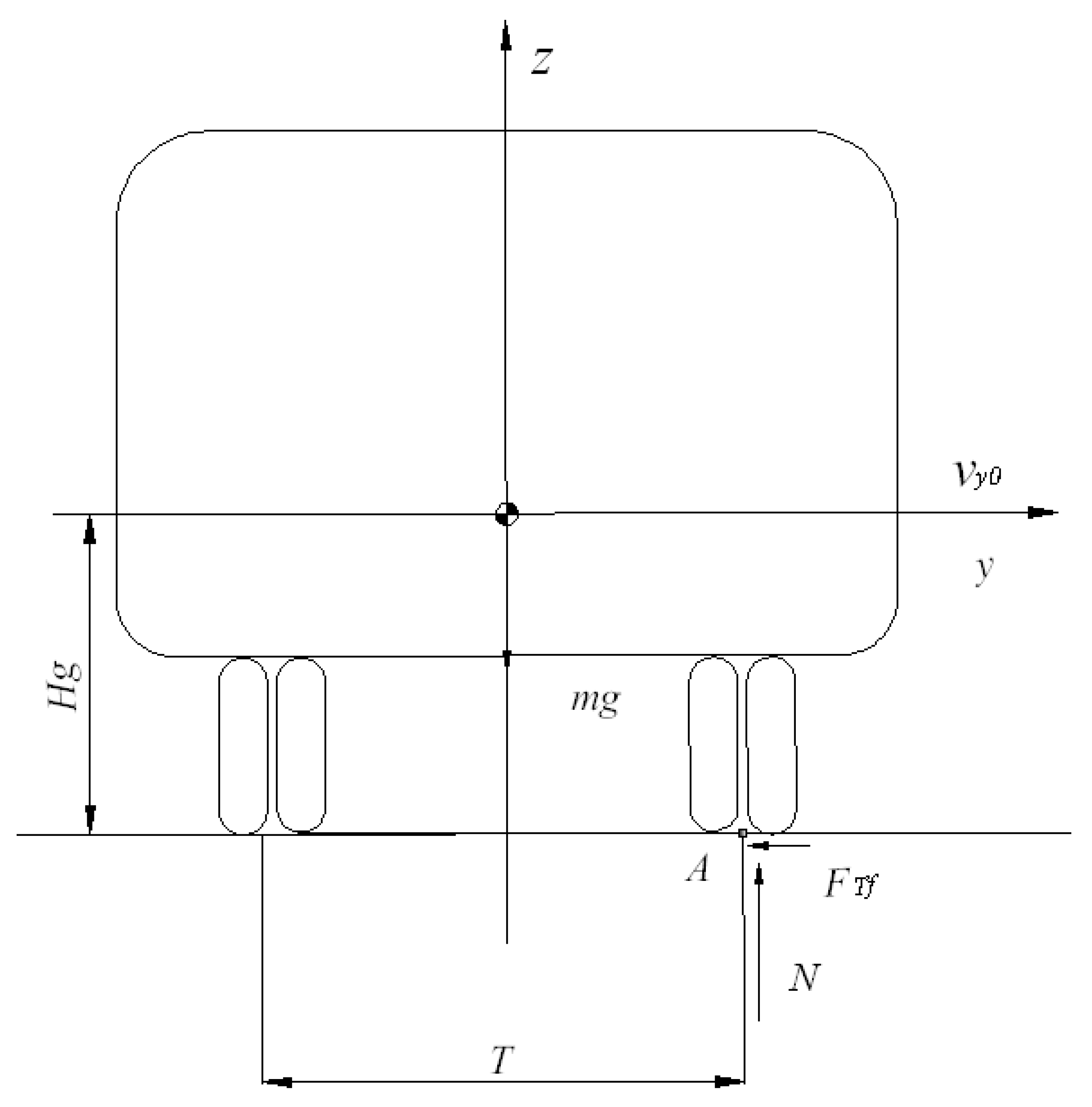
2. Mathematical Modeling of the Critical Rollover Impact Force
- (1)
- The vehicle as a whole is regarded as a rigid body;
- (2)
- The center of mass of the vehicle is in the vertical plane of the center of the axle;
- (3)
- The vertical reaction point on the inner and outer wheels is at the midpoint of the vertical twin tires;
- (4)
- The differences in the parameters of each axis are ignored.
2.1. Mathematical Modeling of Critical Rollover Impact Force between a Vehicle and a Road Obstacle
- (1)
- Relationship between the impact force and collision duration under different values of Vy0.
- (2)
- Relationship between the impact force and collision duration under different Hg (Vy0 = 15 km/h).
- (1)
- When the collision duration is short ( < 0.01 s), the critical rollover impact force is very large and FTf rapidly increases to its maximum value;
- (2)
- The vehicle rollover is not only related to the impact force but also to the duration of the collision effect; even if the impact force is relatively small, if the collision effect lasts long enough, a second collision may occur or cause rollover;
- (3)
- Theoretically, as long as the impact force–action time relationship is above the curve, it can lead to rollover.
2.2. Mathematical Modeling of Critical Rollover Impact force of Two Vehicles
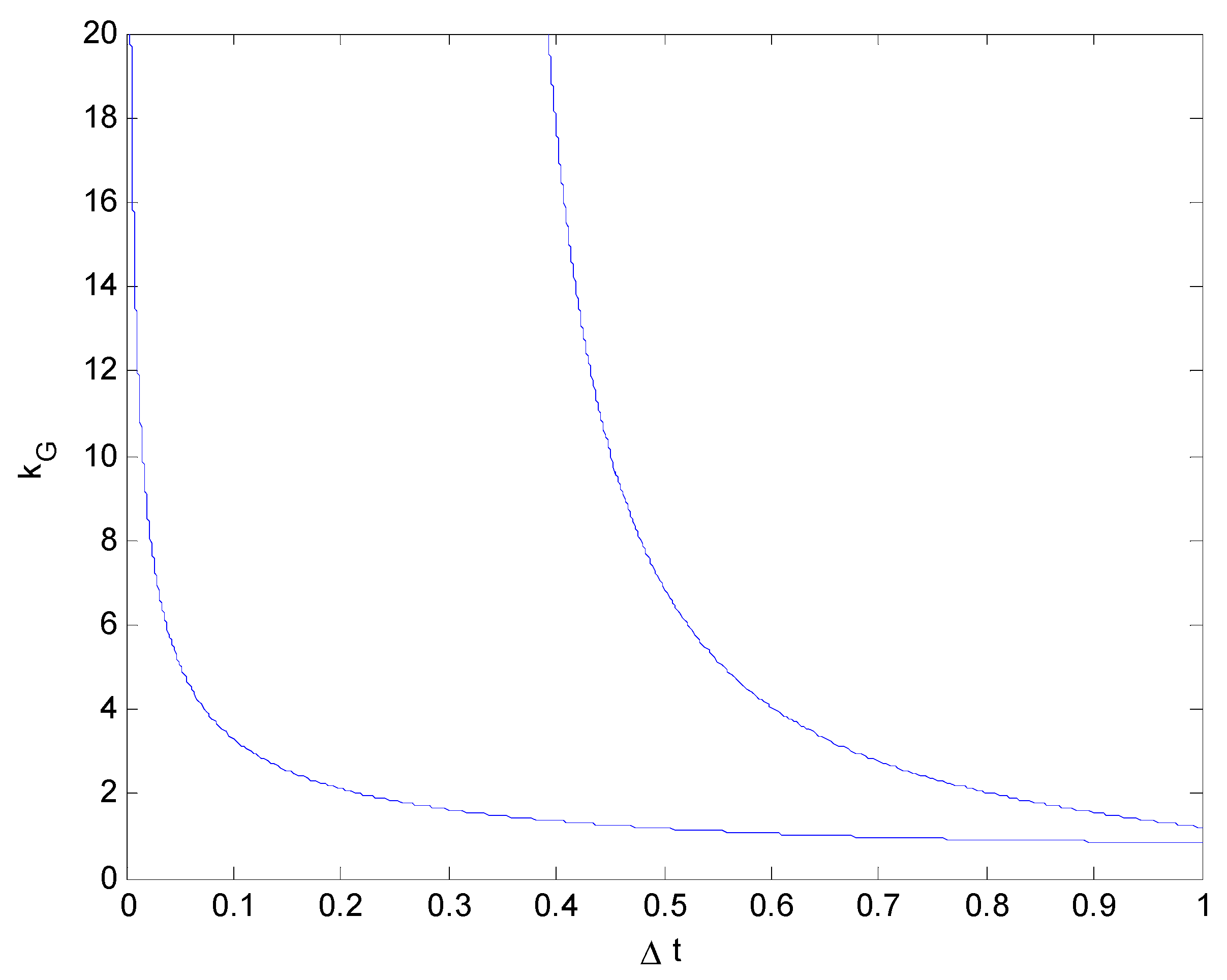
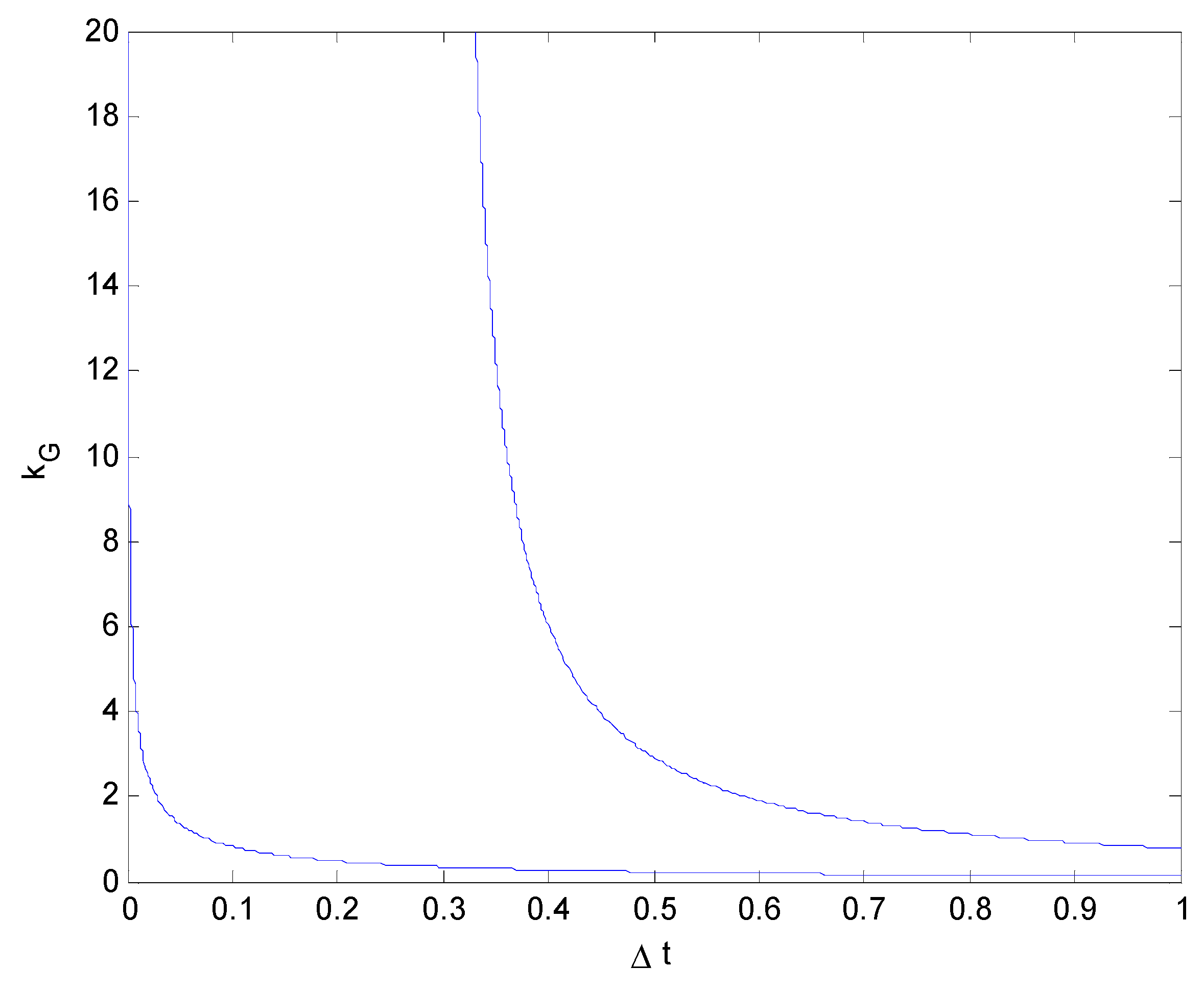
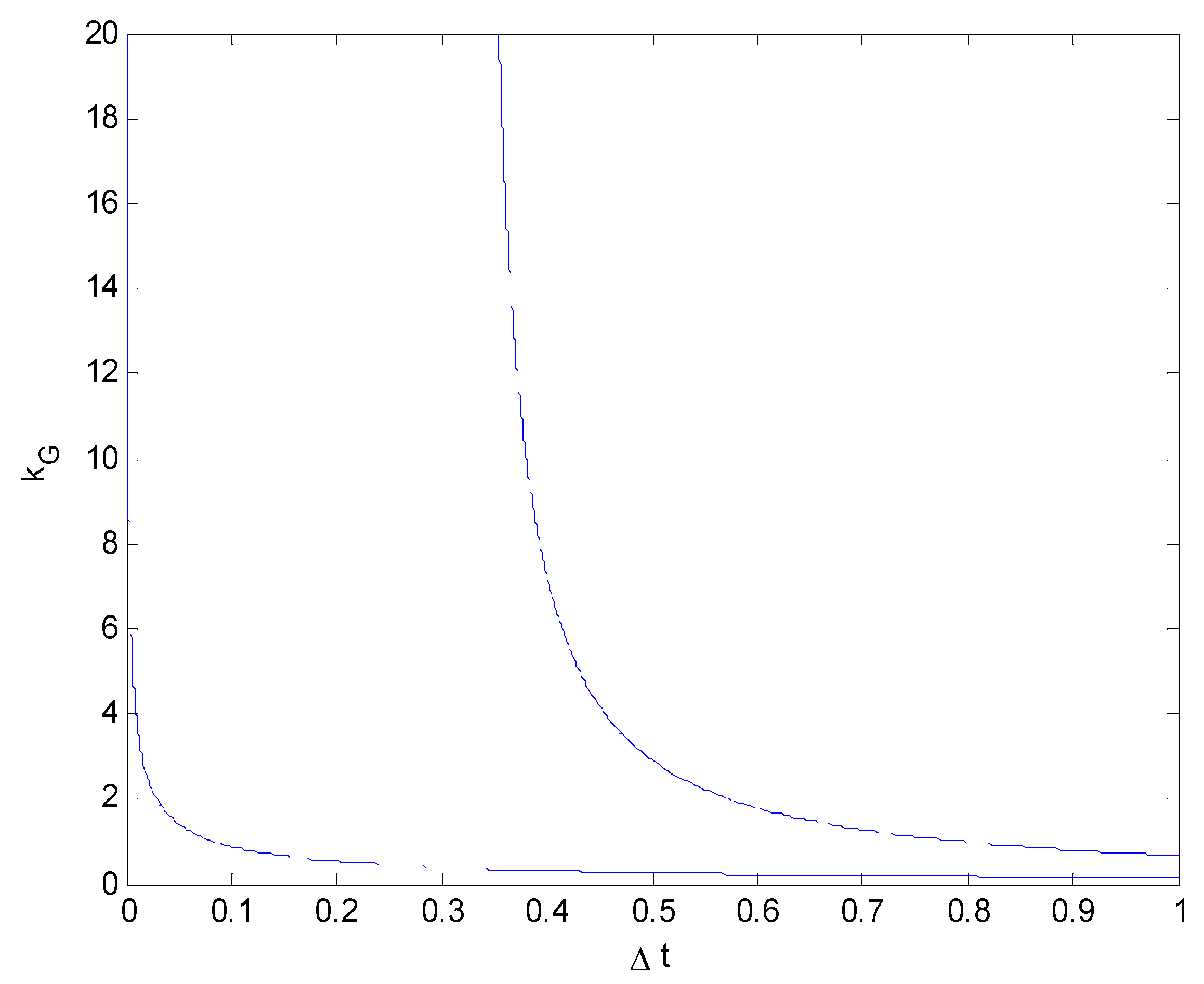
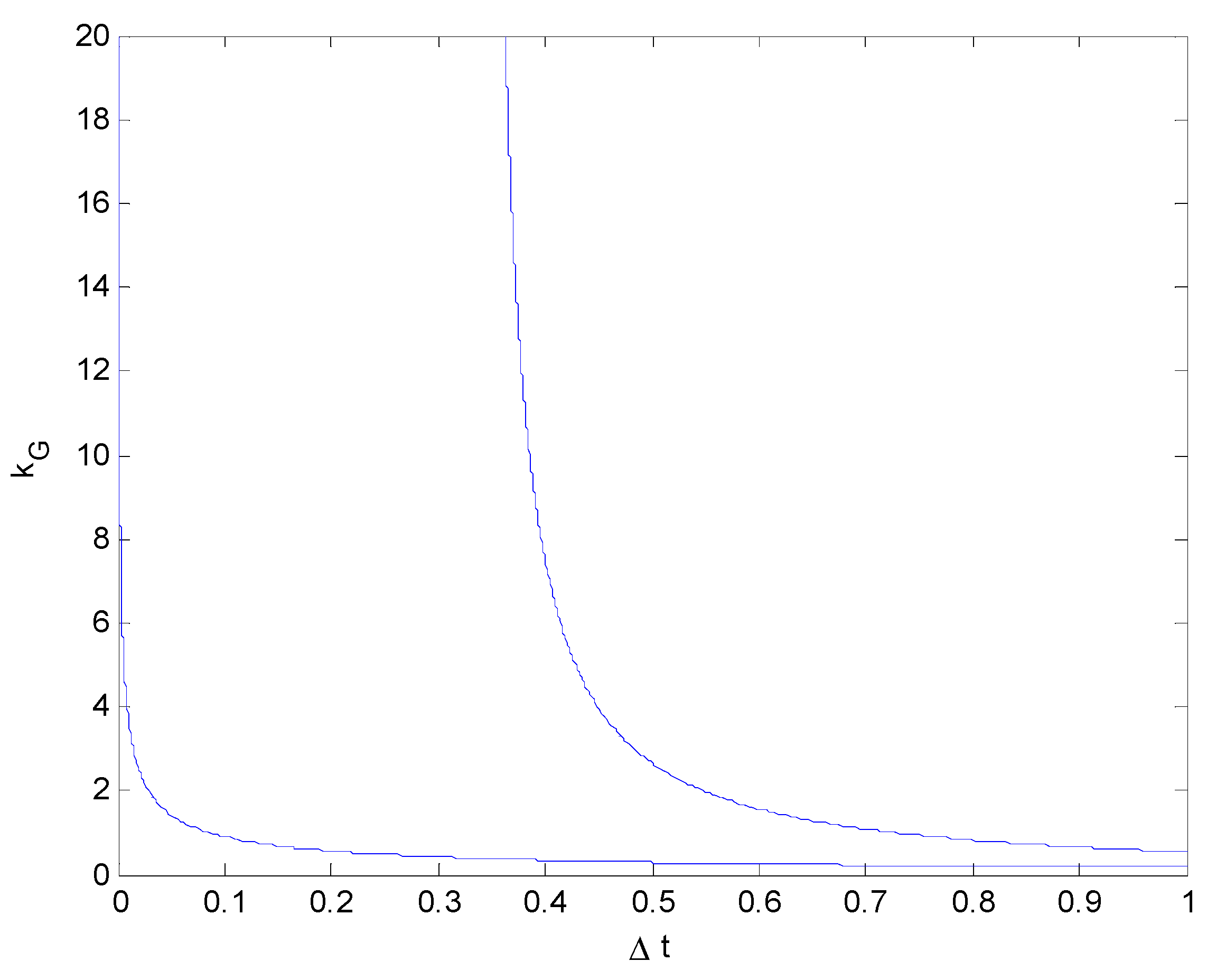
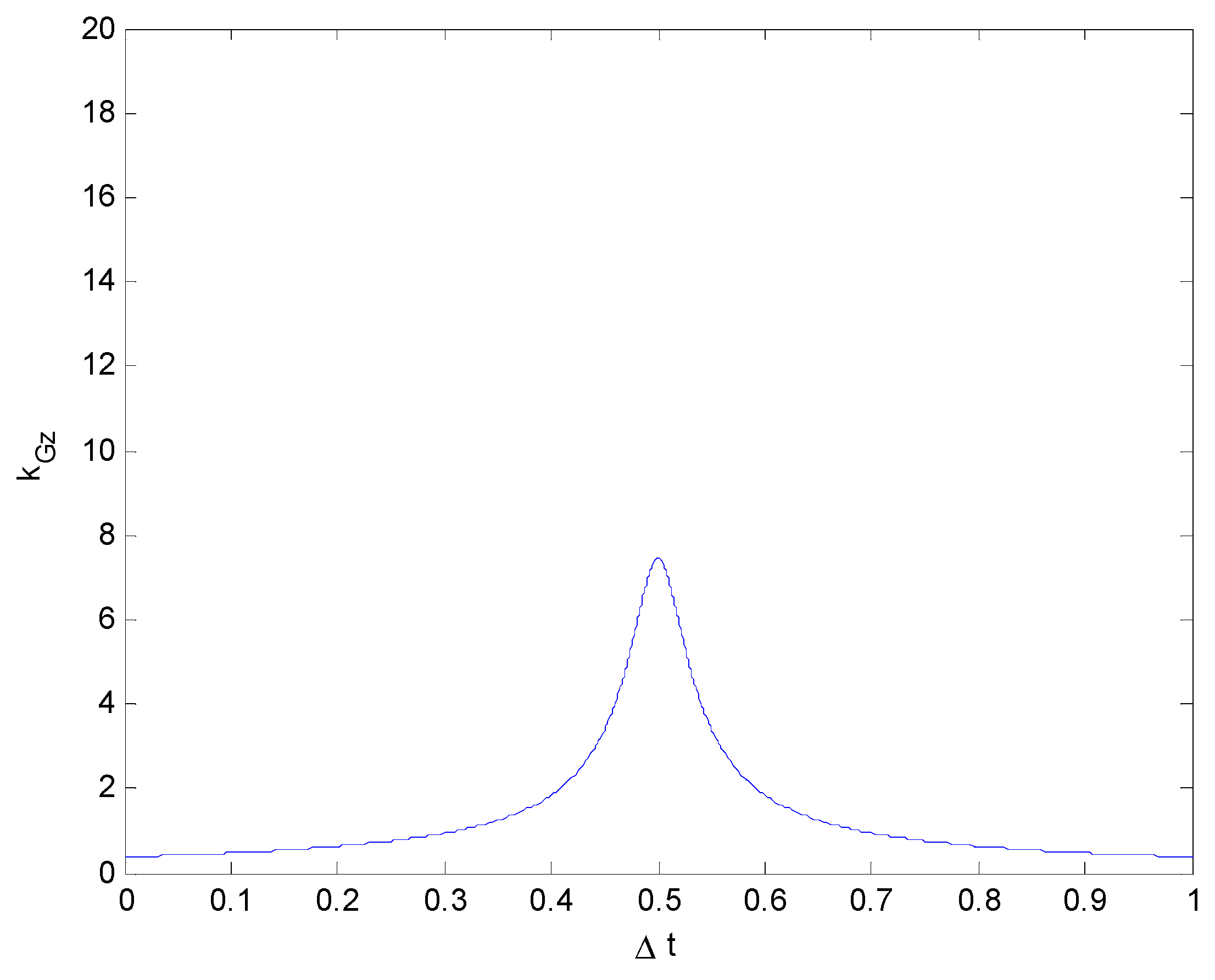
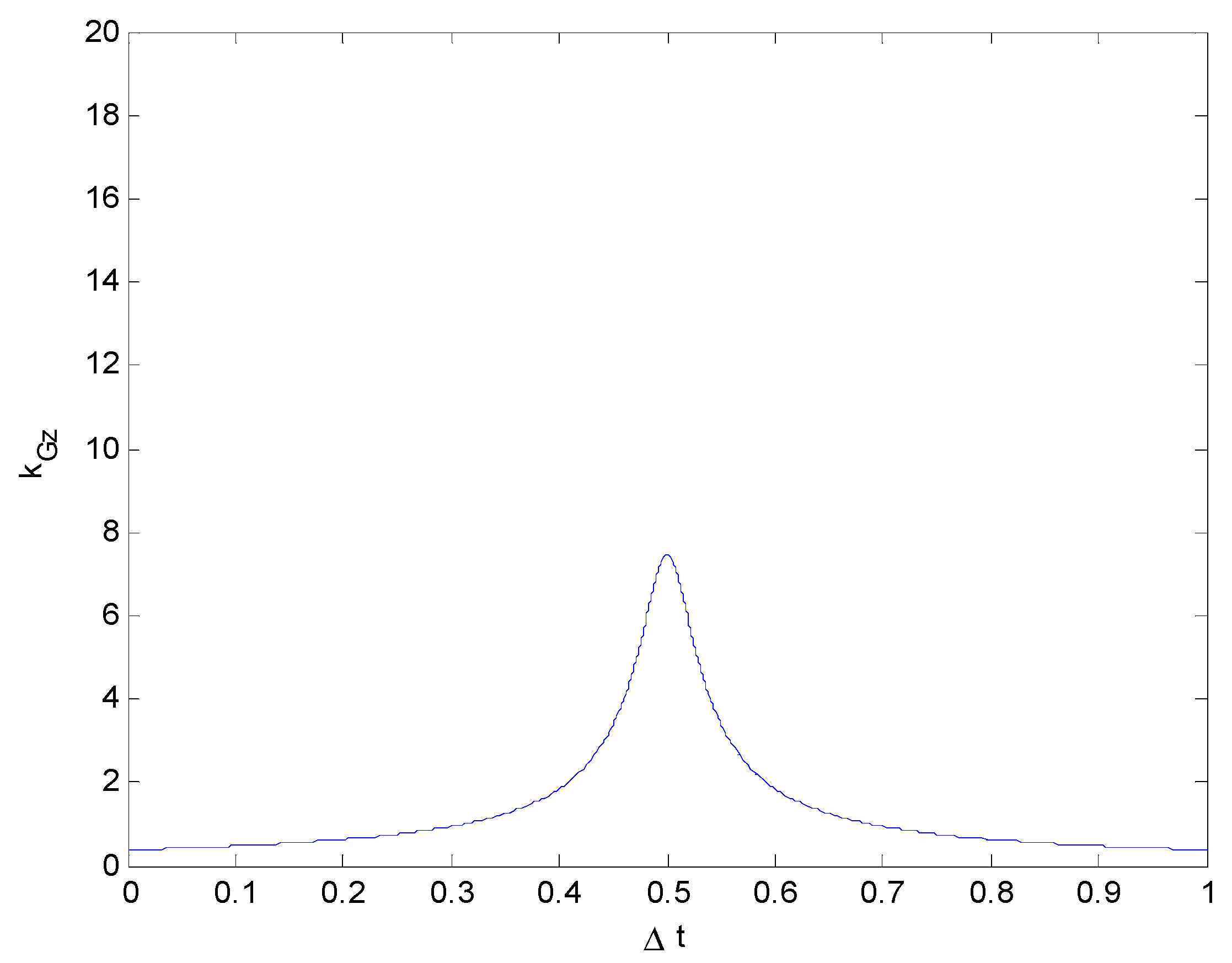
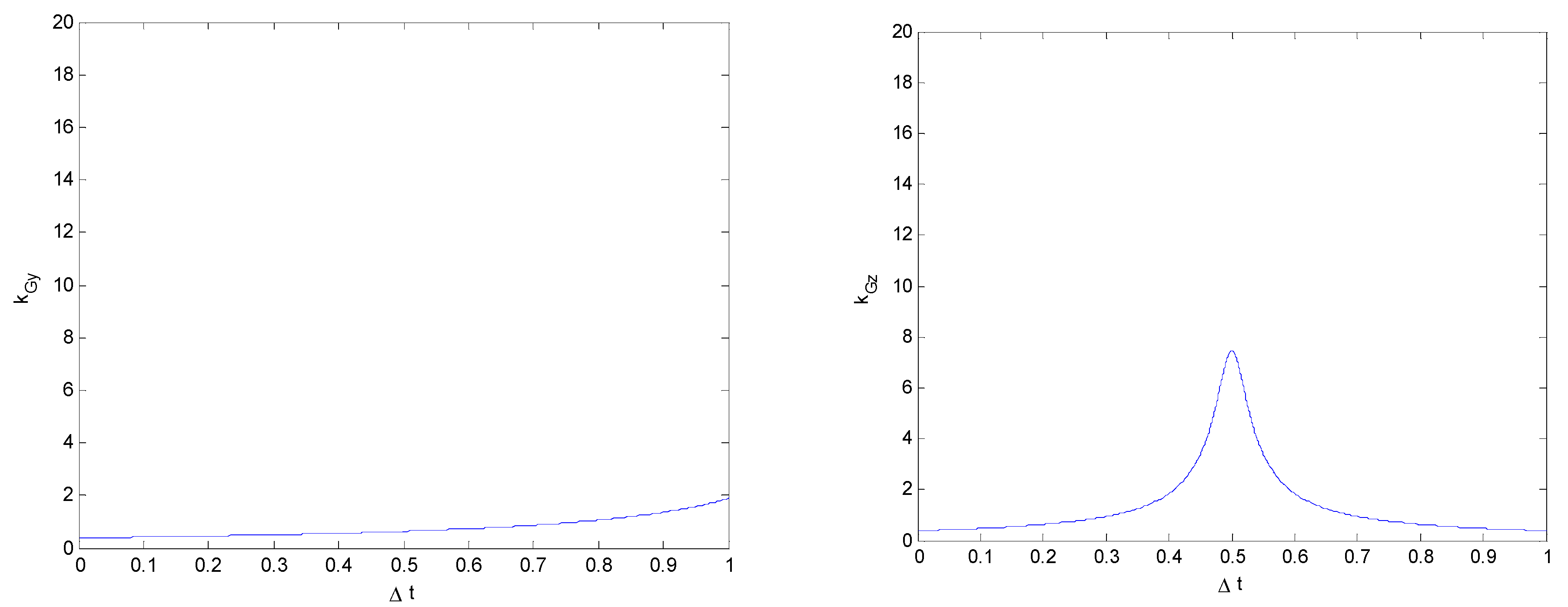
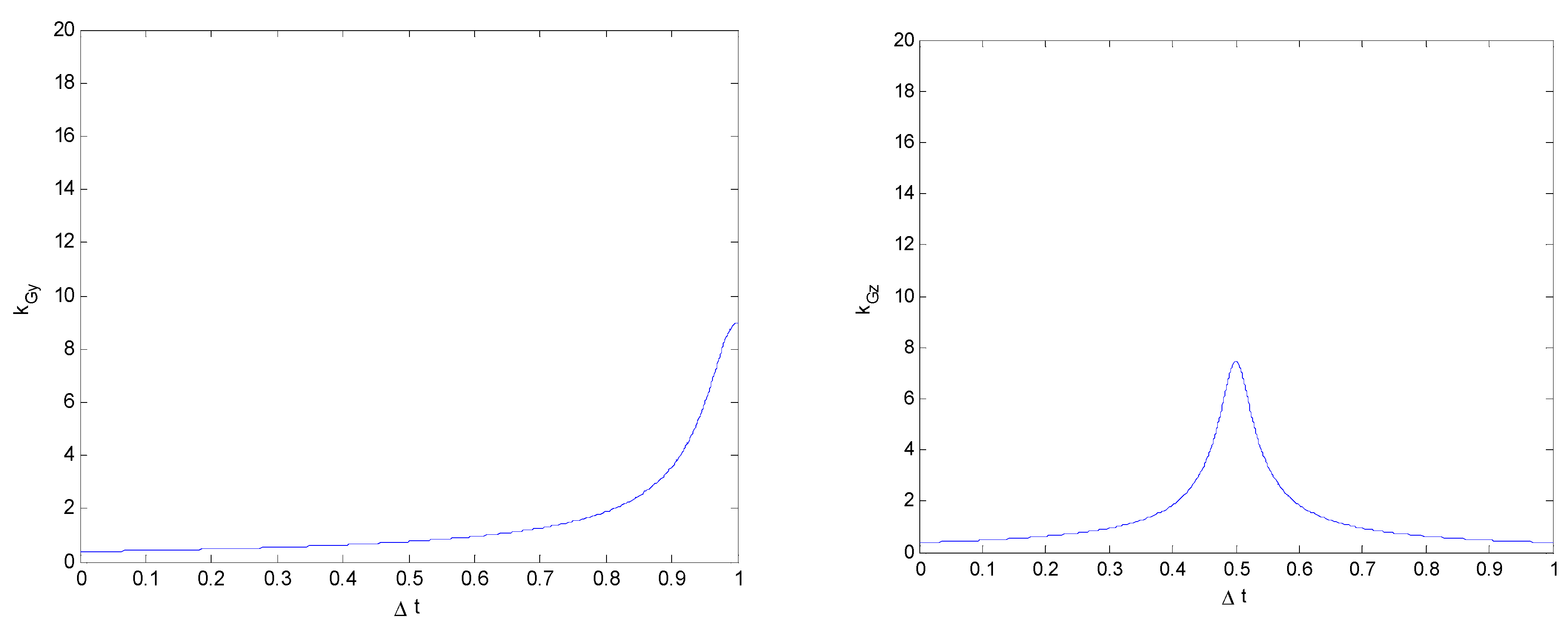
- (1)
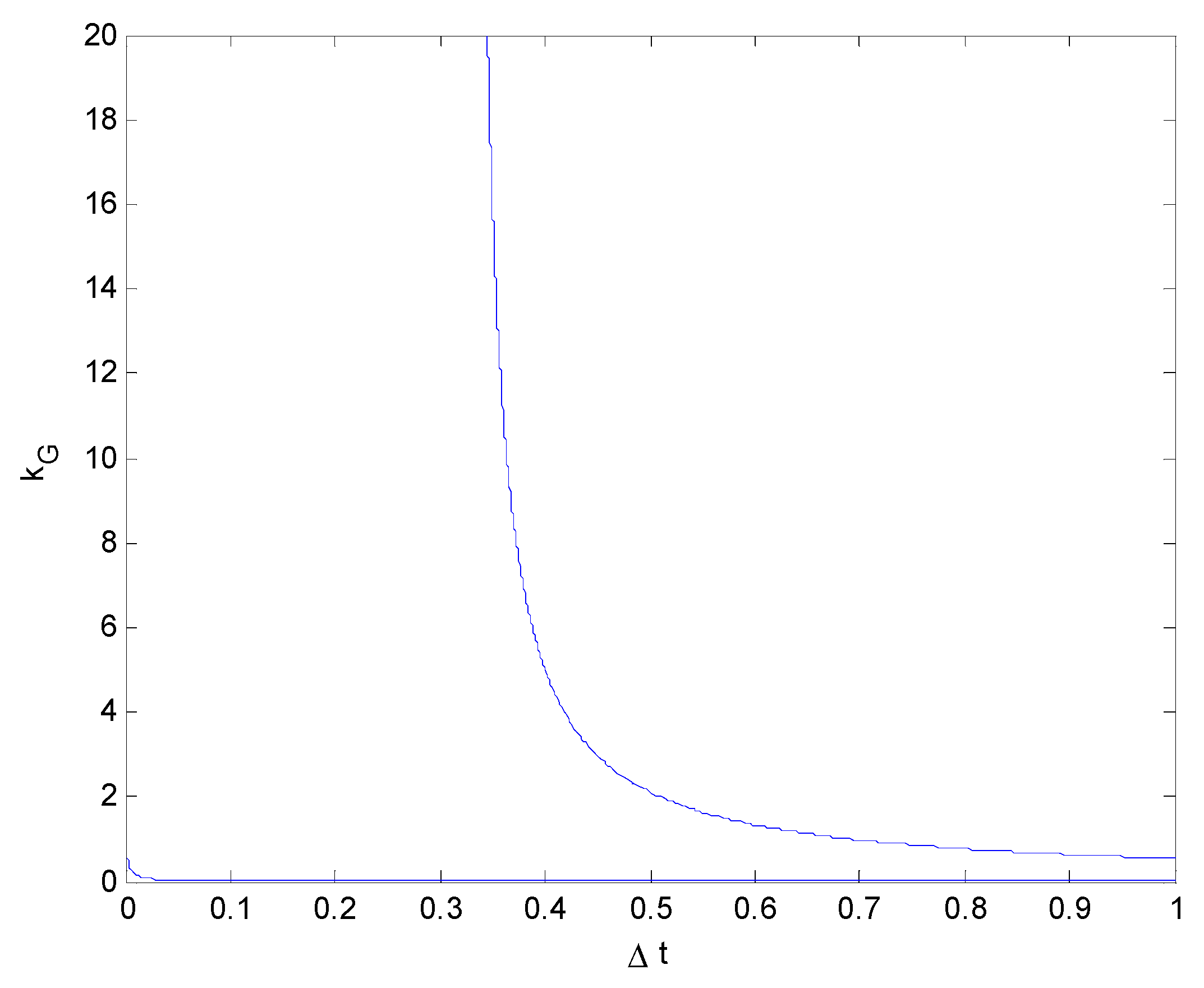
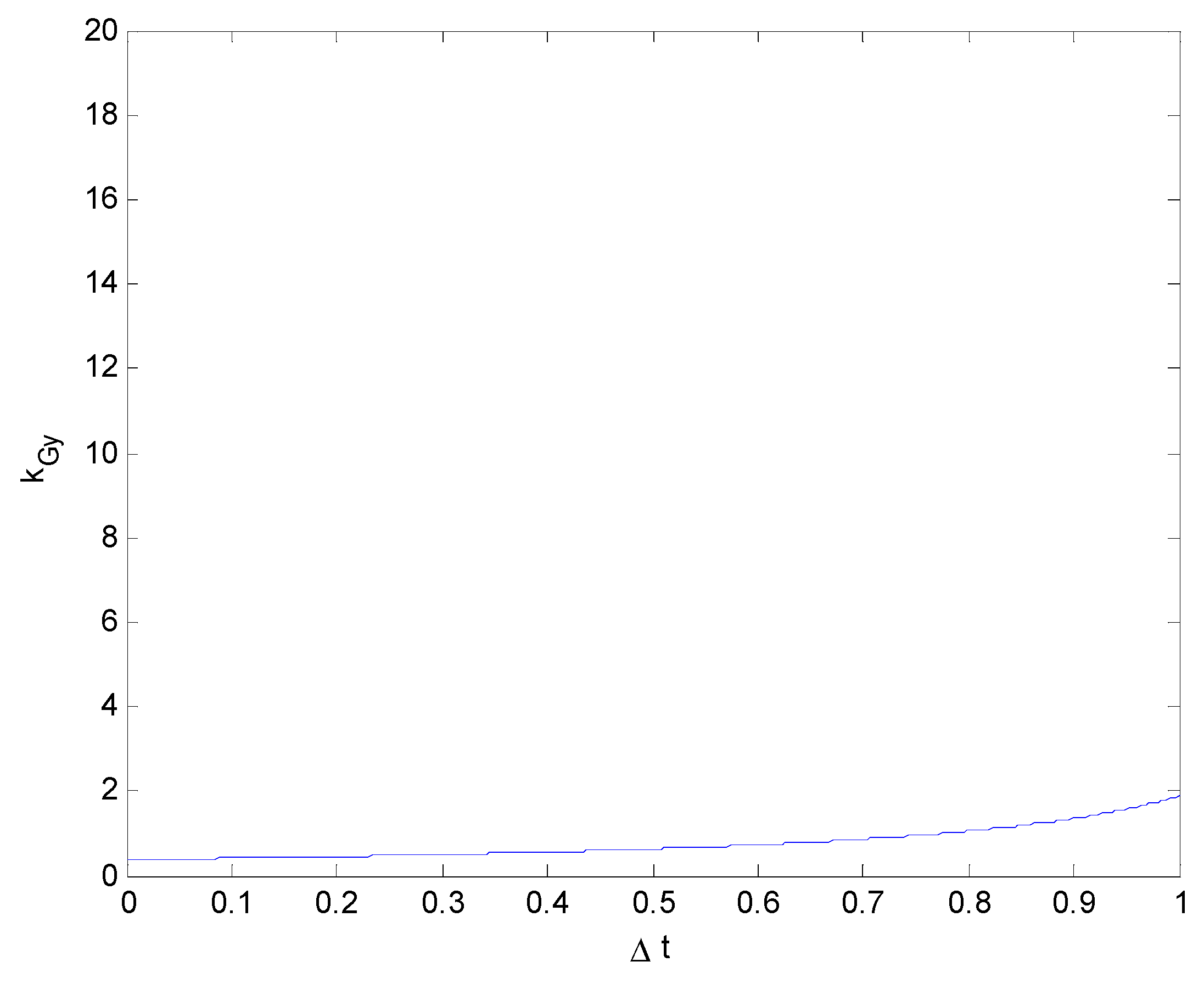
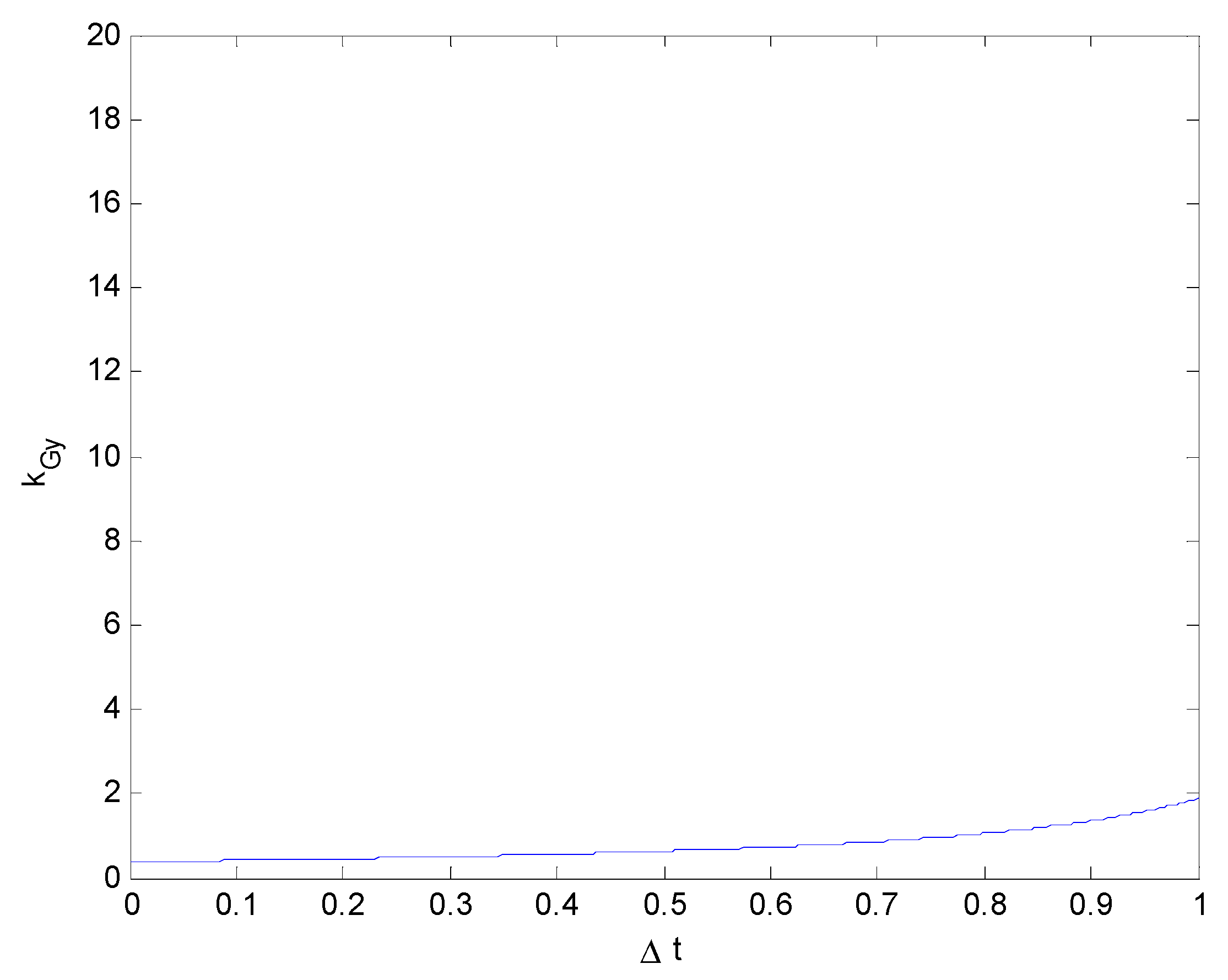
- The relationship between kGz (kGy = 0) and the collision duration Δt.
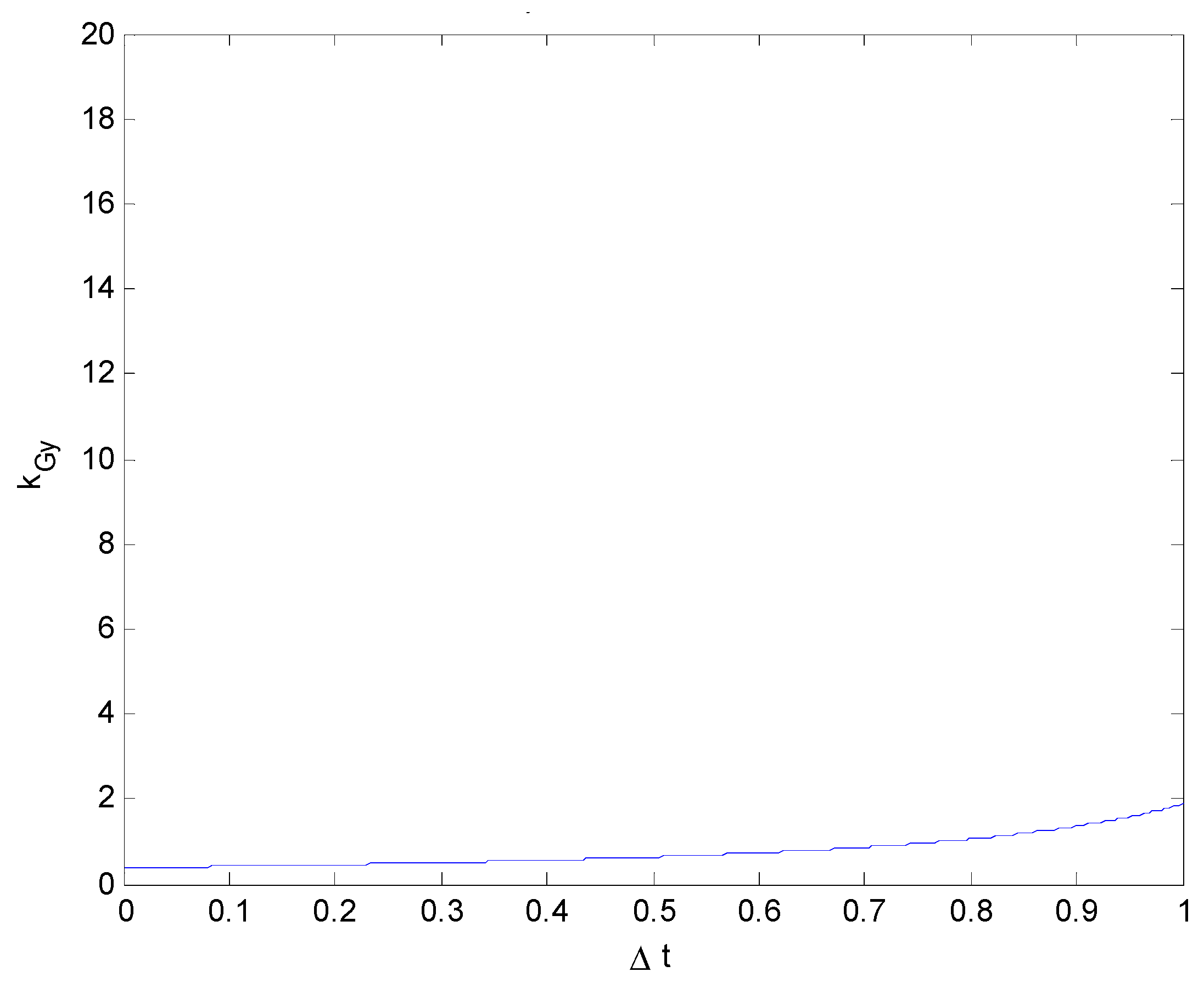
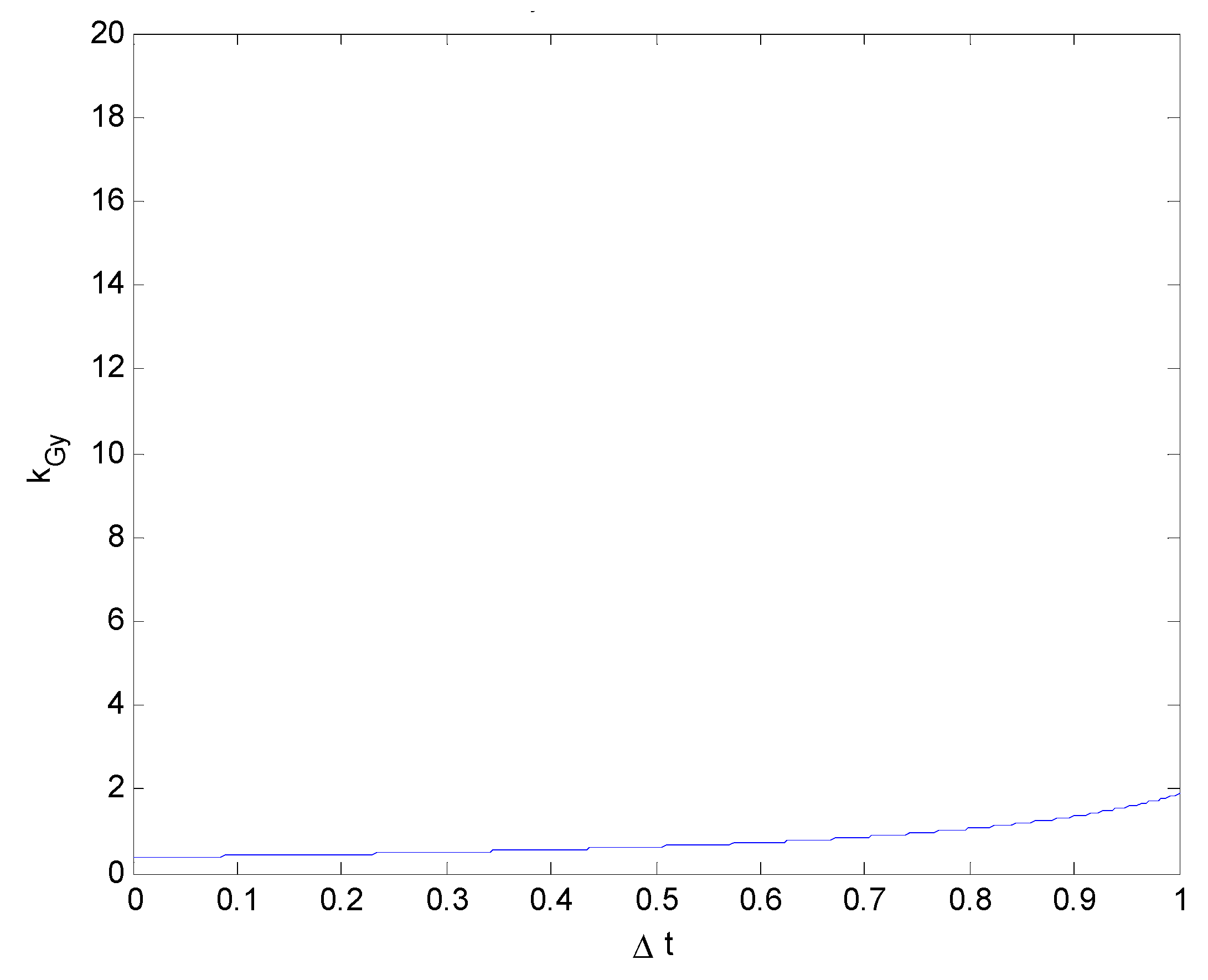
- (2)
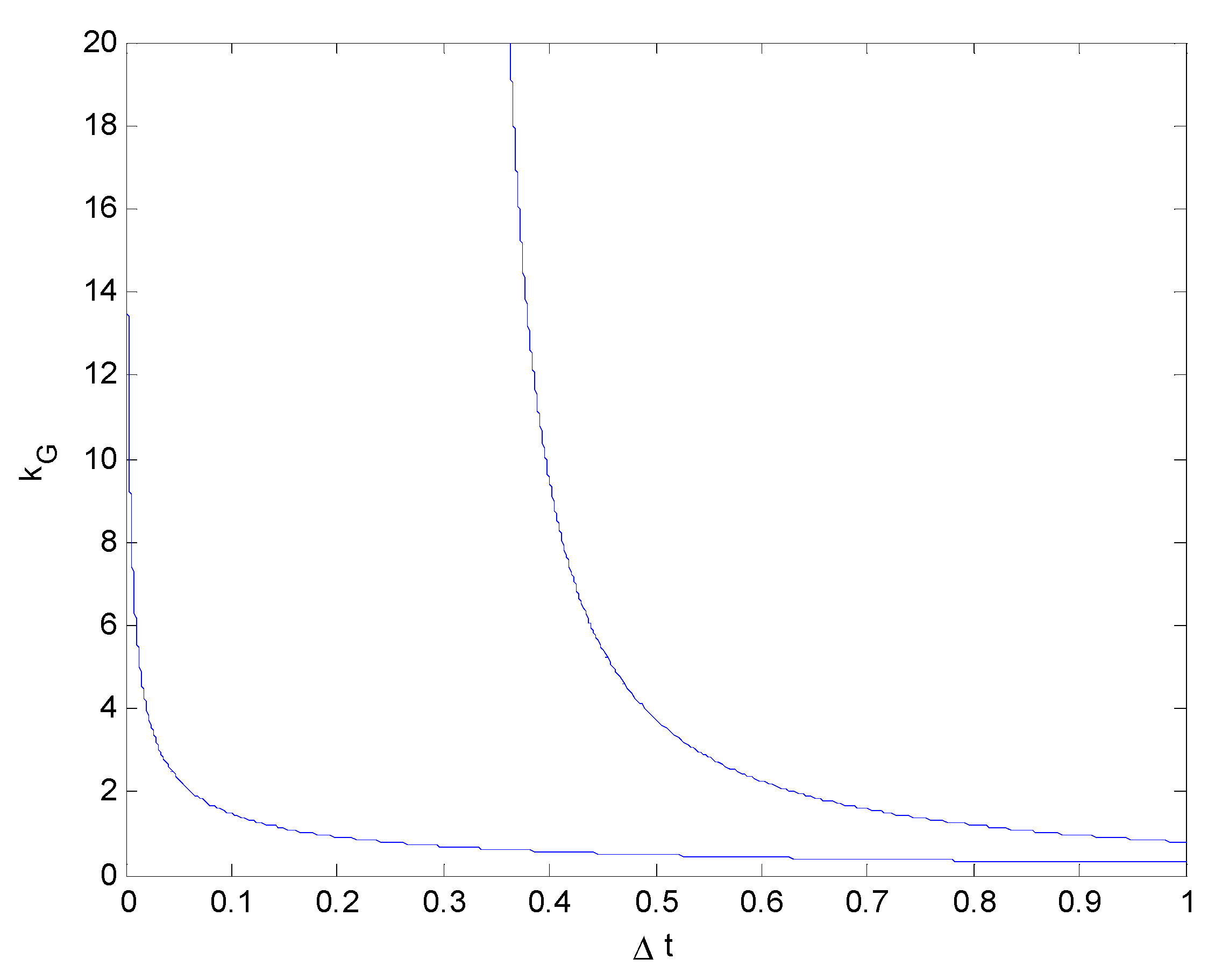
- The relationship between kGy (kGz = 0) and the collision duration Δt.
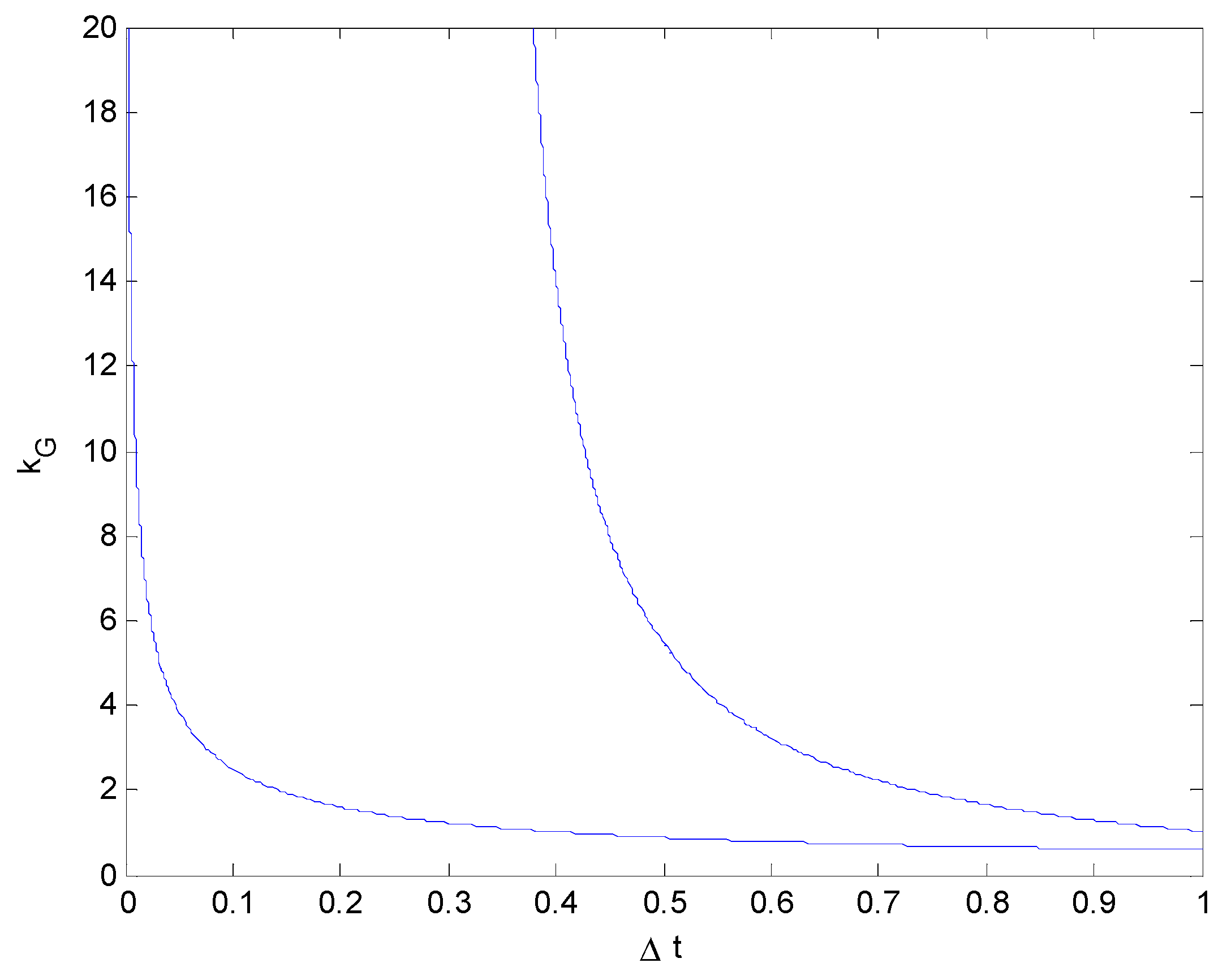
- (3)
- The relationships between KGy and KGz and the collision duration Δt under different Hp (vy0 = 15).
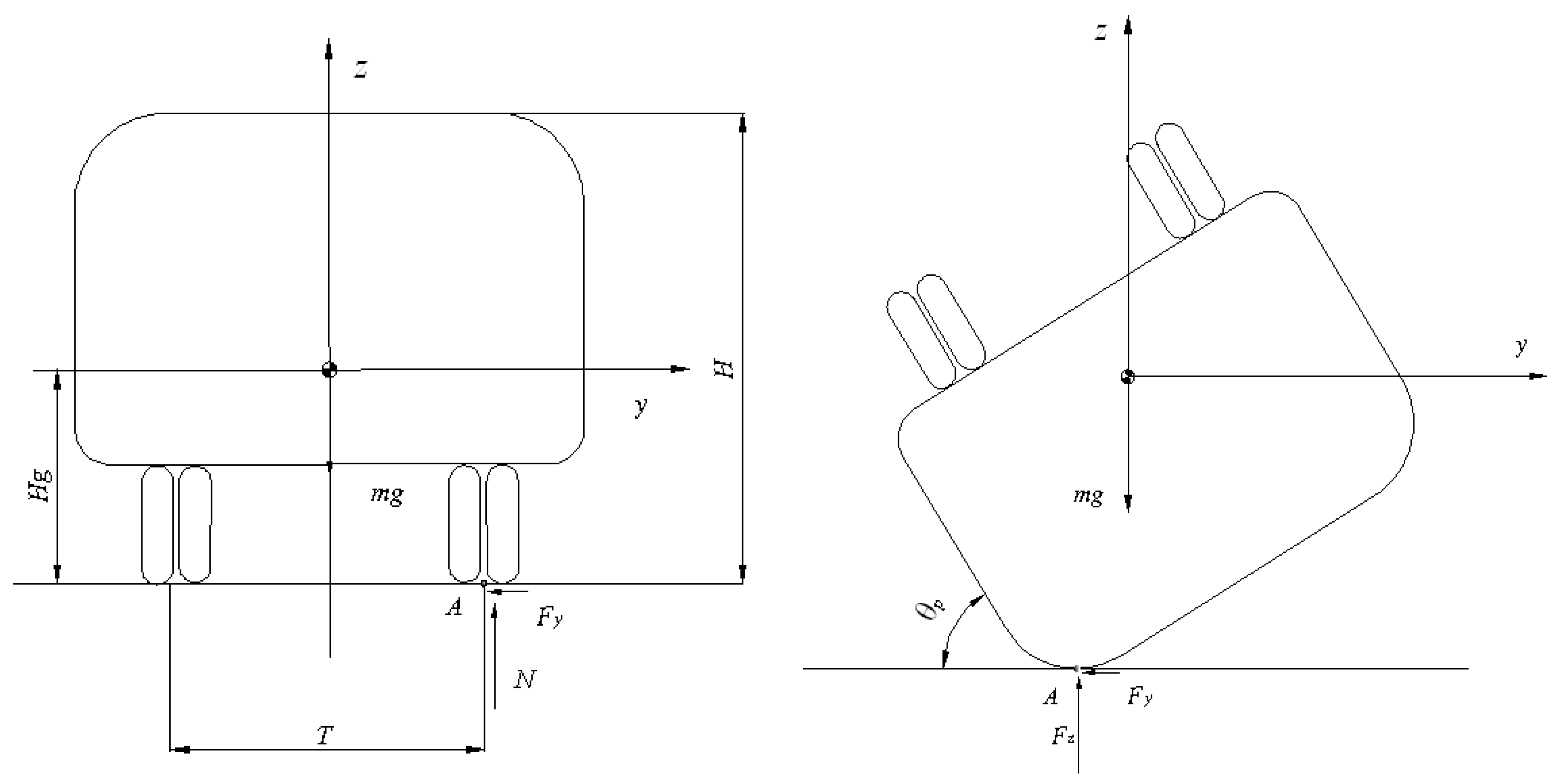
3. Mathematical Modeling of the Critical Rollover Velocity
3.1. Mathematical Modeling of Critical Rollover Speed of a 90° Rollover
3.2. Mathematical Modeling of Critical Rollover Speed of a 180° Rollover
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gong, X.L.; Fang, J.; Tan, X.P.; Liao, A.M.; Xiao, C.H. Current situation analysis of road traffic accidents in 31 provinces and cities in China and trend prediction of halving SDGs casualties. Chin. J. Dis. Control 2020, 24, 4–8+36. [Google Scholar]
- Grzebieta, R.H.; Mcintosh, A.S.; Bambach, M. How stronger roofs prevent diving injuries rollover crashes. In Proceedings of the International Crashworthiness Conference, Washington, DC, USA, 22–24 September 2010. [Google Scholar]
- Frimberger, M.; Wolf, F.; Scholpp, G.; Schmidt, J. Influences of parameters at vehicle rollover. In Proceedings of the International Body Engineering Conference & Exposition, Detroit, MI, USA, 3–5 October 2000. [Google Scholar] [CrossRef]
- Strashny, A. An Analysis of Motor Vehicle Rollover Crashes and Injury Outcomes. Ejection. 2007. Available online: https://trid.trb.org/view/809180 (accessed on 1 March 2024).
- Bedewi, P.; Godrick, D.; Digges, K.; Bahouth, G. An in vesti-gation of occupant injury in rollover: Nasscds analysis of injury severity and source by rollover attributes. In Proceedings of the 18th International Technical Conference On The Enhanced Safety Of Vehicles, Nagoya, Japan, 19–22 May 2003; National Highway Traffic Safety Administration: Washington, DC, USA, 2003. [Google Scholar]
- China Automotive Technology Research Center. Research on Vehicle Rollover Safety Test Method; China Automotive Technology Research Center: Tianjin, China, 2016. [Google Scholar]
- Traffic Administration of the Ministry of Public Security. Annual Report on Road Traffic Accidents; Traffic Administration of the Ministry of Public Security: Beijing, China, 2014.
- Chen, T.; Cai, Y.F.; Chen, L.; Xu, X.; Sun, X.Q. Trajectory tracking control of steer-by-wire autonomous ground vehicle considering the complete failure of vehicle steering motor. Simul. Model. Pract. Theory 2021, 109, 1–15. [Google Scholar] [CrossRef]
- Yu, W.; Gao, W.; Feng, Y. Anti-rollover control of differential Brake Bus based on Fuzzy Control. Automot. Pract. Technol. 2021, 46, 30–34. [Google Scholar]
- Phanomchoeng, G.; Rajamani, R. New rollover index for detection of tripped and un-tripped rollovers. In Proceedings of the Decision & Control & European Control Conference, Orlando, FL, USA, 12–15 December 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Zhu, J.; Li, Y.B. Research on Vehicle Rollover and Roll Accident Modeling. Automot. Eng. 2006, 28, 254–258. [Google Scholar]
- Xu, Z.M.; Yu, H.X.; Wu, X.L.; Zhang, Z.F. Analysis of Rollover Indicators and Rollover risk Factors of Vehicles. J. Chongqing Univ. 2013, 36, 25–31. [Google Scholar] [CrossRef]
- He, H.; Sun, T.; Wang, Y.S. Research on Rollover warning Algorithm for Heavy Vehicles. Comput. Eng. Appl. 2013, 49, 256–261. [Google Scholar]
- Hac, A.; Brown, T.; Martens, J. Detection of Vehicle Rollover. In Proceedings of the SAE 2004 World Congress & Exhibition, Detroit, MI, USA, 8–11 March 2004. [Google Scholar]
- Hac, A. Rollover stability index including effects of suspension design. In SAE Technical Paper Series; 2002-01-0965; SAE International: Warrendale, PA, USA, 2002; pp. 1403–1413. [Google Scholar]
- Solmaz, S.; Akar, M.; Shorten, R. Adaptive Rollover Prevention for Automotive Vehicles with Differential Braking. Int. Fed. Autom. Control 2008, 41, 4695–4700. [Google Scholar] [CrossRef]
- Yao, J.L.; Wang, M.; Li, Z.H.; Ren, B.; Sun, N. Vehicle active roll control based on active suspension Research. J. Mech. Strength. 2018, 40, 534–539. [Google Scholar]
- Imine, H.; Fridman, L.M.; Madani, T. Steering control for rollover avoidance of heavy vehicles. IEEE Trans. Veh. Tech. 2012, 61, 3499–3509. [Google Scholar] [CrossRef]
- Zong, C.F.; Zhu, T.J.; Zheng, H.Y.; Tian, C.W. Semi-truck train with quadratic optimal control. Research on Active Roll Control Algorithm. China Mech. Eng. 2008, 19, 872–877. [Google Scholar]
- Chen, S.; Xia, C.G.; Pan, D.Y. The utility model relates to a novel switching type active lateral stabilizer bar device control research. Automot. Technol. 2018, 9, 56–62. [Google Scholar]
- Chen, Z.M.; Cheng, C.; Chen, B.; Fu, J.H. Torque Optimal Distribution Control for 4WID electric vehicles Strategy Research. Mach. Des. Manuf. 2020, 12, 50–54. [Google Scholar]
- Olmeda, E.; Carrillo Li, E.R.; Rodríguez Hernández, J.; Díaz, V. Lateral Dynamic Simulation of a Bus under Variable Conditions of Camber and Curvature Radius. Mathematics 2022, 10, 3081. [Google Scholar] [CrossRef]
- Morales, G.C.; Alexandrov, V.V.; Arias, J.E.M.G. Dynamic model of a mobile robot with two active wheels and the desing an optimal control for stabilization. In Proceedings of the 2012 9th Electronics Robotics and Automotive Mechanic Conference, Cuernavaca, Mexico, 19–23 November 2012; pp. 219–224. [Google Scholar]
- Zheng, B.G.; Huang, Y.B.; Qiu, C.Y. LQR+PID control and implementation of two-wheeled self-balancing robot. Appl. Mech. Mater. 2014, 590, 399–406. [Google Scholar] [CrossRef]
- Blana, D.; Kirsch, R.F.; Chadwick, E.K. Combined feedforward and feedback control of a redundant nonlinear dynamic musculoskeletal system. Med. Biol. Eng. Comput. 2009, 47, 533–542. [Google Scholar] [CrossRef] [PubMed]
- Shi, H.W.; Shi, S.B.; Li, L. Mathematics modeling of automobile suspension system based on seven degree-of-freedom. Tract. Farm. Transp. 2009, 36, 26–27. [Google Scholar]
- Jeong, D.; Ko, G.; Choi, S.B. Estimation of sideslip angle and cornering stiffness of an articulated vehicle using a constrainedlateral dynamics model. Mechatronics 2022, 85, 102810. [Google Scholar] [CrossRef]
- Gauchia, A.; Olmeda, E.; Aparicio, F.; Díaz, V. Bus mathematical model of acceleration threshold limit estimation in lateral rollover test. Veh. Syst. Dyn. 2011, 49, 1695–1707. [Google Scholar] [CrossRef]
- Niculescu-Faida, O.-C.; Niculescu-Faida, A. Vehicle dynamics modeling during moving along a curved path. Mathematical model usage on studying the robust stability. UPB Sci. Bull. 2008, 4, 49–60. [Google Scholar]
- Seyedi, M.; Jung, S.; Wekezer, J. A comprehensive assessment of bus rollover crashes: Integration of multibody dynamic andfinite element simulation methods. Int. J. Crashworthiness 2020, 27, 273–288. [Google Scholar] [CrossRef]
- Gauchia, A.; Díaz, V.; Boada, M.J.L.; Olatunbosun, O.A.; Boada, B.L. Bus Structure Behaviour under Driving Manoeuvring and Evaluation of the Effect of an Active Roll System. Int. J. Veh. Struct. Syst. 2010, 2, 14–19. [Google Scholar] [CrossRef]
- Zhu, T.J.; Ma, W.; Wang, Z.F.; Yin, X.X. Research on Rollover Warning of Heavy Vehicle Based on AdaBoost Algorithm. J. Chongqing Jiaotong Univ. (Nat. Sci. Ed.) 2021, 40, 25–33. [Google Scholar]
- Shi, Q.J.; Li, J. Anti-rollover Control of Bus Based on Nonlinear Disturbance Estimation. Automot. Eng. 2020, 42, 1224–1231, 1239. [Google Scholar]
- Xia, G.; Li, J.C.; Tang, X.W.; Zhang, Y.; Chen, W.W. Research on Anti-rollover Model Predictive Control of Balanced Heavy Truck. China Mech. Eng. 2021, 32, 987–996. [Google Scholar]
- Xia, G.; Li, J.C.; Tang, X.W.; Zhao, L.; Sun, B. Study on Anti-Rollover of the Counterbalance Forklift Based on Extension Hierarchical Control. Int. J. Automot. Technol. 2021, 22, 643–656. [Google Scholar] [CrossRef]
- Zhang, Y.; Xia, G.; Tang, X.W.; Wang, S.J.; Sun, B.Q. Research on Extended Hierarchical Anti-rollover Control of Balanced Heavy Duty Forklift [J/OL]. China Mech. Eng. 2021, 32, 2705–2715. [Google Scholar]
- Pan, G.Y.; Ding, C.; Wang, W.Q.; Li, A. Application of Extended Zero Moment Point in Vehicle Pitch Control Evaluation and Active Control. J. Jiangsu Univ. (Nat. Sci. Ed.) 2021, 42, 85–91. [Google Scholar]
- Jin, L.Q.; Shi, G.N.; Kong, D.J.; Yu, Y.J. Vehicle Rollover Warning Based on Zero Moment Point Index and Rollover Time Algorithm. Automot. Eng. 2017, 39, 281–287+316. [Google Scholar]
- Jin, L.Q.; Shi, G.N.; Yu, Y.J.; Wang, B.W. Anti-rollover Control of Commercial Vehicle Based on Zero Moment Point Position and Fuzzy Control. Automot. Eng. 2017, 39, 1062–1067. [Google Scholar]
- Huang, K.; Pan, Y.; Zhao, P. Modeling and Experimental Analysis of Vehicle Active Anti-rollover System. China Mech. Eng. 2017, 28, 2701–2706+2731. [Google Scholar]
- Bingül, Ö.; Yildiz, A. Fuzzy logic and proportional integral derivative based multi-objective optimization of active suspension system of a 4 × 4 in-wheel motor driven electrical vehicle. J. Vib. Control 2023, 29, 1366–1386. [Google Scholar] [CrossRef]
- Cooperrider, N.K.; Thomas, T.M.; Hammoud, S.A. Testing and Analysis of Vehicle Rollover Behavior; SAE900366; SAE International: Warrendale, PA, USA, 1990. [Google Scholar]
- Lund, Y.I.; Bernard, J.E. Analysis of Simple Rollover Metrics; SAE 950306; SAE International: Warrendale, PA, USA, 1995. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m/kg | WT/m | Hg/m | Ixx/kg·m2 | g/m·s−2 |
|---|---|---|---|---|
| 10,138 | 1.9951 | 1.083 | 11,529 | 9.787 |
| Speed Type | CSV1 (km/h) | CSV2 (km/h) | V2 (km/h) |
|---|---|---|---|
| Calculated value | 70.0311 | 73.8491 | 100.368 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Wang, Z.; Chen, S. Research on Mathematical Modeling of Critical Impact Force and Rollover Velocity of Coach Tripped Rollover Based on Numerical Analysis Method. Symmetry 2024, 16, 543. https://doi.org/10.3390/sym16050543
Wu X, Wang Z, Chen S. Research on Mathematical Modeling of Critical Impact Force and Rollover Velocity of Coach Tripped Rollover Based on Numerical Analysis Method. Symmetry. 2024; 16(5):543. https://doi.org/10.3390/sym16050543
Chicago/Turabian StyleWu, Xinye, Zhiwei Wang, and Shenghui Chen. 2024. "Research on Mathematical Modeling of Critical Impact Force and Rollover Velocity of Coach Tripped Rollover Based on Numerical Analysis Method" Symmetry 16, no. 5: 543. https://doi.org/10.3390/sym16050543
APA StyleWu, X., Wang, Z., & Chen, S. (2024). Research on Mathematical Modeling of Critical Impact Force and Rollover Velocity of Coach Tripped Rollover Based on Numerical Analysis Method. Symmetry, 16(5), 543. https://doi.org/10.3390/sym16050543