1. Introduction
The goal of this work was to solve the energy eigenvalue equation in single-particle quantum mechanics (often called the time-independent Schrödinger equation). This is usually formulated in position space, where, for example, in one dimension, the momentum operator is represented by
, and the time-independent Schrödinger equation becomes the second-order linear differential equation
for the energy eigenvalue
E and the energy eigenstate, which is represented as a wavefunction
. Here,
is the potential that the particle moves in and
M is the particle’s mass. This equation was introduced by Schrödinger in 1926 [
1].
Fourteen years later, Schrödinger developed another approach to solve for energy eigenvalues and eigenstates [
2]. It uses a representation-independent methodology that factorizes the Hamiltonian in the form
Here,
and
are operators that satisfy the canonical commutation relation
,
and
are raising and lowering operators (also called ladder operators), and the factorization method determines the ground-state energy
E without explicitly determining the ground-state wavefunction. Instead, it simply postulates the existence of a state that is annihilated by
via the subsidiary condition
, and then, because the Hamiltonian is written as a positive semidefinite operator plus a constant, the energy of this state is given by
E. The lowering operator is written as
with
W being the superpotential. Often, there are multiple choices for the superpotential that provide a factorization—one must choose the superpotential that satisfies some additional conditions that guarantee the ground-state wavefunction will be normalizable in order to have a valid solution. For example, in a one-dimensional problem, we need
to be positive for
and negative for
, and to be finite for all
x (there can be additional conditions). When the superpotential satisfies these conditions, it is a supersymmetric superpotential. To find the higher energy eigenstates, one forms the factorization chain, which involves defining new auxiliary Hamiltonians, factorizing them, and constructing the higher-energy eigenstates by applying the appropriate ladder operators to each auxiliary Hamiltonian ground state. It would take us too far afield to describe the further details of that construction here, but this context provides the jumping off point for our work.
The name superpotential comes from a revival of the factorization method by Witten [
3] in the 1980s, which led to the field of supersymmetric quantum mechanics. Supersymmetric quantum mechanics works with a single factorization, which is subsequently used to construct two partner potentials that are related to each other as two adjacent links in a factorization chain. The system of two Hamiltonians can be formulated into an additional two-by-two matrix structure that represents bosonic and fermionic sectors. Broken supersymmetry can be examined within this context as well. We will not discuss supersymmetric quantum mechanics further here, but we do note two books that provide further context for the method [
4,
5]. The problem of determining exactly solvable potentials within supersymmetric quantum mechanics has been studied widely. We mention in particular work led by Lévai, which is closely related in its approach to the work we present here [
6,
7,
8]. While that work is focused on finding and clarifying different classes of exactly solvable potentials, our work here is focused on describing a different methodology for determining energy eigenstates.
Determining the initial factorization for the ground state typically requires the solution of a nonlinear Ricatti equation. Conversely, the ground-state wavefunction can always be employed to construct a factorization if it is known. We simply choose the superpotential to satisfy
, where the prime indicates a derivative with respect to the argument of the function; then, the Schrödinger equation is equivalent to the Ricatti equation for the superpotential:
In analytically solvable problems (so-called shape-invariant potentials), one can directly determine the superpotential without requiring an explicit solution of the Ricatti equation or knowing the ground-state wavefunction (an example is the well-known abstract operator method applied to the simple harmonic oscillator). Such cases are exceptions, not the general rule. Once one formulates the Ricatti equation, it can also be solved directly without
a priori knowledge of the ground-state wavefunction to factorize the Hamiltonian.
The single-shot method for bound states is half-way between the Schrödinger equation and the factorization method. It works by finding a single factorization in a general form and then determines all of the allowed energies that yield normalizable solutions. This methodology has already been employed to find continuum eigenstates of exactly solvable problems [
9]. The bound-state problems bring in a number of additional subtleties due to the quantization of the energy eigenvalues.
In this work, we develop the single-shot factorization method for bound states. We apply it to solve for all exactly solvable energy eigenvalue problems that can be solved with wavefunctions that include a confluent hypergeometric function multiplied by simple functions (powers, exponentials, Gaussians, etc.). This is the same problem that Natanzon solved [
10], where he described all potentials that have confluent hypergeometric functions as part of their wavefunctions. Our approach is markedly different from Natanzon’s though, and we show in detail how the two methods interrelate.
2. Formalism of Single-Shot Factorization
In our general description, we examine problems in one-, two-, and three-dimensions. Rather than using
for our general variable, we use
. It can represent the one-dimensional
x, the two-dimensional radial coordinate
, or the three-dimensional radial coordinate
. The effective Hamiltonian of a system with a non-relativistic particle of mass
M moving in an effective potential
then becomes
where
represents the aforementioned radial coordinate operator and
is the “radial” potential that is derived using separation of variables. We use a subscript
q on the momentum operator because in two or three dimensions, it will be the corresponding radial momentum operator.
We want to factorize the Hamiltonian in the form
where
is the energy of the system and
, which is the lowering operator, is given by
in terms of
, which is the superpotential, and
k, which is a wavenumber that makes the superpotential and its argument dimensionless. We slightly changed the form of the superpotential here by introducing some constants that make the remainder of the analysis clearer. We hope this causes no confusion to the reader.
By using the subsidiary condition
we can express the superpotential in terms of a function
:
The derivatives can be thought of formally as being computed by taking the functions as functions of a real variable
q, performing the standard derivative, and then substituting
into the final functional form of the derivative. In 1D, we have
as the wavefunction. But in 2D,
is
times the radial wavefunction, and in 3D,
is
r times the radial wavefunction. These results are critical in determining the wavefunction itself in higher dimensions—they arise because of the form of the radial momentum operators in higher dimensions. Letting
, we can rewrite the superpotential as
Since we are looking for potentials that can be solved in terms of the confluent hypergeometric functions, we consider the following ansatz:
where
is a solution to the confluent hypergeometric equation that is well-behaved near
,
and
are functions of
, and
a and
b are parameters, all of which are set during the solution of the problem. When we talk about solutions of a differential equation, we replace the operator by a real variable, as we described above. The functions
f and
are chosen to be real valued, as are the coefficients
a and
b. Note that there are always two linearly independent solutions to the confluent hypergeometric function. In most cases, these can be represented in terms of the functions
and
, but in special cases, the two linearly independent equations are more complicated (see Ref. [
11] for more details). Typically, the second solution
U is not physically admissible due to its behavior near
. Because of this, we only consider the confluent hypergeometric function
in this work. For a more general treatment of this problem and additional details of the following calculations, we refer to previous work on the continuum solutions [
9]. Natanzon [
10,
12] solved the problem of what potentials can be solved with this ansatz using a different methodology. We compare our approach with his later in the paper.
Substituting Equation (
11) into Equation (
10) yields
where we put a hat onto
when we do not explicitly indicate its operator-valued arguments. Note that derivatives with respect to the operators should be thought of in a formal way, as we described above. From equations
,
,
, and
in the
Digital Library of Mathematical Functions (DLMF) [
13], we find that
Let
We use this and Equation (
13) to rewrite the superpotential as
By construction,
g is a real-valued function, as is the derivative of
. For real parameters
a and
b and real-valued
, one finds that the ratio of hypergeometric functions is also real valued (when thought of as a function of a real variable), which is a requirement in the factorization method for Hamiltonians that have no linear terms in momentum. Hence, we obtain the raising and lowering operators corresponding to our ansatz via
and
Calculating
then gives the following:
where the extra derivatives arise from the commutators of momentum operators with the functions of position operators. Finding a factorization for the given Hamiltonian requires
must be independent of
E in order to have a valid set of solutions to the energy eigenvalue problem. This is a critical requirement, as we can solve the converse problem—start from this ansatz for the wavefunction (or ladder operator) and determine all possible potentials that can be solved with this ansatz (this is, in essence, Natanzon’s problem). The requirement that the potential is independent of
E is a stringent requirement in finding such solutions. Another way of stating this is that the only
E dependence on the left-hand side of the equation can be a linear dependence on
E—otherwise, the potential will change with each energy eigenvalue, and this is not a problem we are interested in exploring.
Since
a and
b oftentimes do depend on energy, the simplest way to avoid the energy dependence of the potential is to set the coefficient in front of
to zero. It remains to be seen whether this step is absolutely necessary to produce solutions, and we discuss this issue in more detail later. Indeed, Natanzon essentially assumed this must be true in his classification scheme. It is not clear whether weakening this requirement could still yield solutions, but we will not consider the weakened requirement any further here. Enforcing the requirement, then, implies we have to enforce the condition
Rearranging, we find that
which we substitute into Equation (
19) to obtain
The standard way to solve this problem is then to fix the effective potential and determine
,
,
a, and
b to produce the wavefunctions and energies of the system. The function
is then found from Equations (
14) and (
21) as
Solving for
gives
The final wavefunction (in operator form) then becomes
To express this as a traditional wavefunction, we simply substitute
and multiply by the appropriate power of
q for 2D and 3D cases to obtain the corresponding radial wavefunctions. Another requirement we must now introduce is that bound-state wavefunctions are normalizable. Let us look at the limiting behavior of
at extreme values. When
a is not a non-positive integer (
), we have that
If the range of
contains
, the ansatz will not yield a normalizable wavefunction because it will behave like
in that limit, which diverges. This requires us to set
a to be a non-positive integer (
), where we have
for
, 1, 2, ⋯, which typically leads to a normalizable solution that decays as
. Finally, we obtain the solution for a given effective potential by determining a
that satisfies Equation (
22), and then we determine the
a and
b values that lead to normalizable wavefunctions.
This approach to the problem assumes that the other linearly independent solution does not produce any new solutions to the problem. This is well-known for all analytically solvable potentials and a detailed analysis allowing for the other linearly independent solution always shows that it does not produce any new solutions [
11]. Therefore, we do not perform this analysis here.
Note that we can work with Equation (
19) in another way. We can find normalizable wavefunctions and substitute their results into Equation (
19) to find solvable effective potentials (and energy eigenvalues). This requires the potentials to also be bounded from below for all
q in the domain of the problem at hand. We use this alternative approach when comparing our work to that of Natanzon.
4. Relationship to Natanzon’s Work
Natanzon determined the most general class of potentials that can be solved by both hypergeometric and confluent hypergeometric functions [
10,
12,
14]. While he analyzed the problem thoroughly, he was not able to express the potentials in a closed form for the generic case. This remains true today—many of the potentials can only be determined numerically.
Natanzon’s strategy was to transform the appropriate hypergeometric or confluent hypergeometric differential equation into the Schrödinger equation and read off the allowed potentials. This is a very different strategy from the one we chose, where we used an ansatz to factorize the Schrödinger equation that incorporated confluent hypergeometric functions. Clearly, these two approaches should yield the same final results for the confluent hypergeometric cases, but the relationship between the two is not so simple at first glance. We concretely show the relationship here, sticking with the operator form of the derivation so that the final results of the Natanzon method and the single-shot factorization method can be directly compared.
We start from the confluent hypergeometric function and ask when it can be transformed into the Schrödinger equation via a specific change in variables. The confluent hypergeometric function differential equation is given by
We first transform the second-order differential equation into the canonical form consisting of only a second derivative term and a constant term. To remove the first-order derivative, we make the transformation
which results in the differential equation
with
which is known as the Bose invariant. Now, we want to transform the differential equation to a differential equation in terms of
, which is a variable that determines
, just as we had before with the factorization method. The differential equation is transformed into
We remove the term linear in the derivative with respect to
using a similar transformation to find
with
The notation
is the so-called Schwarz derivative, which is given by
Now, to transform the confluent hypergeometric function into the Schrödinger equation, we must have
The Bose invariant can be rewritten as
Substituting this into equation Equation (
124) gives us
This is identical to the final Equation (
22), which we arrived at after calculating
. By approaching the problem using a wavefunction that contains a confluent hypergeometric function, our method implicitly arrives at this constraint, while Natanzon’s method arrives at the same condition by explicitly showing the relationship between the confluent hypergeometric and Schrödinger equations. Note that Natanzon actually started his work from a scaled confluent hypergeometric equation, which is required to solve for the general case. It turns out that we can obtain this more general result by scaling
, which we do to obtain
Note that we must have
because the wavefunction behaves like
as
.
Natanzon’s method does not yield a term that depends on the confluent hypergeometric function, as we found in Equation (
19), because the coordinate transformation does not depend on energy. This provides further justification for setting that term to zero in our formulation, but does not exclude the possibility that one can solve these problems with that term, at least not yet. The reason why Natanzon’s approach does not have this term is that he excluded it earlier in his derivation in order to have a potential that is independent of
E.
Although we use different approaches, we end up with the the same result (after our rescaling). One can then proceed by plugging a potential into the RHS of Equation (
127) and following the method outlined in the previous section, or one can solve for all possible energies and potentials in a parametric form, as Natanzon does. We give an outline on how to achieve this parametric form and discuss the criteria for finding potentials that admit bound states. Of course, this approach works for both techniques since the starting equation is the same.
At this stage, we work with parametric functions, and it is more convenient to work with real-valued functions, thus we drop the hats from the remainder of the article.
In order to find a parametric form for the desired potentials, and under the assumption that
and
have no dependence on
E, we require that the energy
E arise in the following way. We express the coefficients in the square brackets on the first line of Equation (
127) in terms of numbers independent of
E plus a term proportional to the energy. Therefore, we take
where we introduce a dimensionless
; we also introduce a dimensionless potential
. Then, we find that Equation (
127) has the
term given by
which requires the first two factors on the RHS to multiply to 1, or
We have a choice for the sign, which is up to us. We pick the positive sign. Using this relation allows us to re-express Equation (
126) as
after some significant algebra to compute all of the higher order derivatives and using the constraint to simplify the final results. Now, we choose the limit of the potential to be zero as
, which requires
. We also see that in the limit as
, the limit of the potential is
. Hence, in general, the potential has asymmetric limits as
.
The constraint in Equation (
132) further implies that
The variable
q is required to be real. One way to guarantee this is to require
in the domain
; one can see that
as
if
and
as
if
. The positivity requirement leads to the constraints that
Enforcing this, we can now solve Equation (
134) using 2.261, 2.266, and 2.267 of [
15]. In the case where
and
, we find
with
. One can show that the arguments of the logarithms are always positive on the domain when we enforce the constraints on the coefficients. Here
is an arbitrary integration constant since the origin of the position coordinate can lie anywhere. When
, we have
Now, by choosing values for the five parameters and inverting the function , it is possible to obtain potentials that can be solved using the confluent hypergeometric function by computing the potential and energy, as well as verify that the potential satisfies the required conditions and the energy is larger than the minimum value of the potential.
Notice that is not easily invertible unless all but one of , , and are equal to zero. In these three cases, the resulting potentials are the three potentials solved earlier. However, if more than one of the three , , and are non-zero, then contains inverse trigonometric functions along with the square root of a polynomial. This combination has no known analytical inverse. We work with the system as a parametric set of equations when we do the numerics to avoid needing to perform any numerical inversions.
The allowed energies can be found by requiring
a in Equation (
126) to be a non-positive integer in order for the resulting wavefunctions to be normalizable. This leads to the general result (when
) that
which is real and positive because we must have
and
, and
because the asymptotic behavior near
requires
, and the energy satisfies the equation
with
. This result agrees with Natanzon’s. Given values for the five parameters, it is possible to determine whether the corresponding potential has bound states by solving Equation (
140) for real roots that are less than the minimum of 0 and
. There is only one negative energy root for each
n value.
Natanzon carefully analyzed these equations and concluded the following results. If , the parameter space can be split into three regimes:
If
and
, then Equation (
140) does not permit any bound states because there can be no solutions for
because the RHS is always less than zero;
If , there will be an infinite number of bound states that converge to zero because the RHS is dominated by the first term and it is unbounded as ;
If and , the potential may have bound states if .
If
, we must have
, and then
,
, and
Once again, there should be only one negative energy root for each value of
n. In this case, we can split the parameter space into two regimes:
If , there will be an infinite number of bound states;
If , the potential may have a finite number of bound states.
Note how the criteria given by Natanzon are necessary but not sufficient. There are two parameter regimes in which there may be bound states, but we do not have sufficient information to determine this analytically. One must instead explore these cases numerically, as we do in the next section. We also want to emphasize that because Natanzon’s final equation is identical to our requirement, this approach also identifies all potentials that can be solved by single-shot factorization.
5. Numerical Examples of Natanzon Potentials
As we described above, most of the potentials that can be exactly solved by confluent hypergeometric functions cannot be found analytically. They tend to have similar shapes to each other, approaching a constant value to the left and to the right (not always an equal constant). To have potentials with bound states, we must ensure the potentials have minima. While it is known that if the potential has the same limit to the left and the right and it always lies below that limiting value, it must always have at least one bound state; when the limits are different, or the potential does not always lie below the limit, less is known about whether there is at least one bound state.
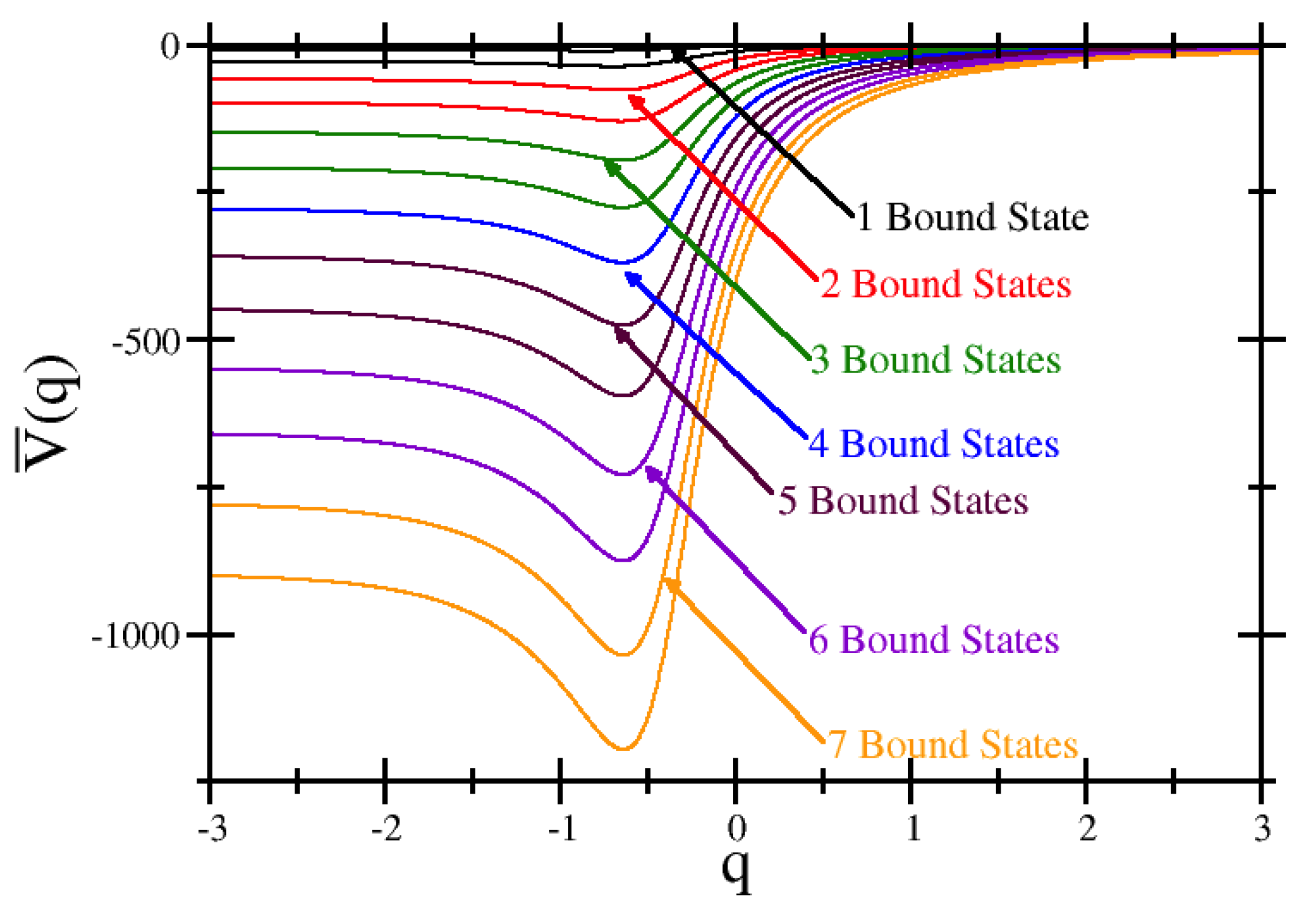
For our numerical examples, we chose cases where the left limit varied, while the right limit was always at 0. To achieve this, we took
,
,
,
,
, and
. This was the case that had at least one bound state. This was because the negative value for
requires
in order for the far right square root in Equation (
140) to be a real number. In this regime, the first term on the right-hand side was small and negative, while the second term was large and positive. The maximal
n value we could have if we neglected the small negative terms was then
for these sets of parameters. One can see we had one bound state for
less than about
(the correct value is
), two bound states when
was less than about
, three when
was less than about
, and so on.
The strategy to compute the results numerically is then straightforward. We set
on a grid. In order to obtain large negative values of
q, we needed pick a small step size near
because
q goes to
only logarithmically in
;
q and
are related approximately linearly when
. Then, with this set of
values, we next compute the parametric equations
from Equation (
136) and
from Equation (
133). Then, we plot
by simply using the corresponding results for
q and
V. The potentials for these parameters are plotted in
Figure 1 (The data for the figure is provided in
Supplementary Materials). They all have clear wells where we have bound states. As we decrease
, the well becomes deeper, which allows for more bound states. The approximate transition points are reported in the caption of
Figure 2. The potential becomes more asymmetric as well. As the depth becomes deeper, we anticipate that there would be more bound states, but in all cases, we expect just a finite number of them. As shown in
Figure 2, the energy of each bound state decreases approximately linearly with
. New bound states enter with energies near the left asymptotic limit and then move downward. In addition, the higher-energy bound states have a smaller spacing than the lower-energy ones. This behavior is similar to the behavior seen in the bound states of the Morse potential. We verify the results for the energy eigenstates via an independent “shooting method” code to find the ground states with specific energy eigenvalues. We find that the shooting method (performed on a finite, rather than infinite, domain) produces an energy that agrees to four or more decimal points, confirming all of the numerics.
6. Conclusions
In this work, we describe a different approach to solving the energy eigenvalue problem, which we call single-shot factorization. By introducing an ansatz for the superpotential that is a logarithmic derivative of confluent hypergeometric functions, plus some additional simple functions, we are able to find analytical solutions by inputting an analytically solvable potential and determining the energies and wavefunctions by enforcing appropriate boundary conditions and normalization conditions. The approach can also be used in the converse way by inputting a normalizable eigenfunction and using the factorization to determine the potential. This converse problem is equivalent to Natanzon’s method, but our approach provides a different perspective to this problem, especially with regard to its relationship with supersymmetric quantum mechanics.
In supersymmetric quantum mechanics, or more generally in the conventional factorization method, one forms a factorization chain and a sequence of auxiliary Hamiltonians to solve the problem. In each case, the factorization is performed with a superpotential that is a logarithmic derivative of a ground-state wavefunction, which has no nodes. Instead, in the single-shot factorization approach, there is no factorization chain, no auxiliary Hamiltonians, and each factorization has a superpotential that is singular at the nodes of the wavefunction. This provides another perspective of the energy eigenvalue problem that is different from the Schrödinger equation approach and the conventional factorization method.
In the process of our solution, we found it expedient to require the constraint in Equation (
20) to ensure that the potential was independent of the quantization energy. This constraint naturally arose in Natanzon’s work when converting hypergeometric differential equations to the Schrödinger equation. If there happens to be some special form of
such that
is not dependent on
a and
b, there might be additional solutions to be uncovered that go beyond what Natanzon discovered. Most likely, any new solution would need to be on a finite and not infinite domain, as it might be easier to enforce the constraint of the potential not depending on the energy for that case.
This work focused exclusively on confluent hypergeometric function representations for the eigenfunctions. It should be possible to extend this work using hypergeometric functions and even Heun functions. Some work in this direction has already been completed from the perspective of supersymmetric quantum mechanics [
16]. This indicates that the single-shot factorization method we use here should be able to be extended in these directions. We leave this question for future work.



{kind=link}
{kind=link}

