
A Non-Convex Fractional-Order Differential Equation for Medical Image Restoration

Abstract
1. Introduction
2. Model Review and Related Algorithm
2.1. Multiplicative Denoising Model
2.1.1. The RLO Model
2.1.2. The AA Model
2.1.3. The SO Model
2.1.4. The I-Divergence Model
2.2. The Weberized Denoising Model
2.2.1. The Weberized ROF Denoising Model
2.2.2. The Weberized AA Denoising Model
2.2.3. Weberized I-Divergence Denoising Model
2.3. ADMM Introduction
- the objective function: .
- the restrictive condition: .
3. Modeling and Analysis
3.1. The Proposed Model
3.2. Theoretical Analyses
3.2.1. Existence
3.2.2. Uniqueness
4. Numerical Methods
4.1. The Gradient Descent Method
| Algorithm 1: Partial Differential Equation Methods (PDE) |
|
4.2. The ADMM Algorithm
- Solve
- Solve
| Algorithm 2: FWADMM (Fractional-order Weber I-div model) |
|
5. Numerical Results
5.1. Model Evaluation Metrics
- 1.
- Mean-Square Error (MSE)
- 2.
- Signal-to-Noise Ratio (SNR)
- 3.
- Structural Similarity (SSIM)
- 4.
- Peak Signal-to-Noise Ratio (PSNR)
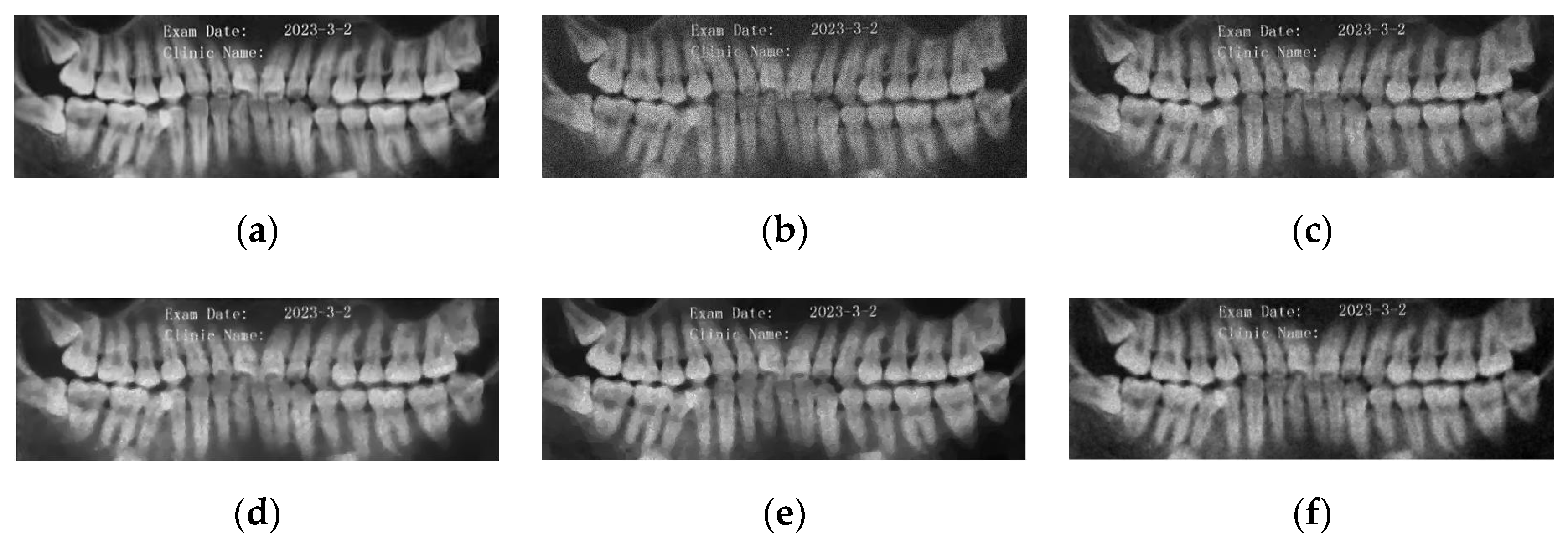
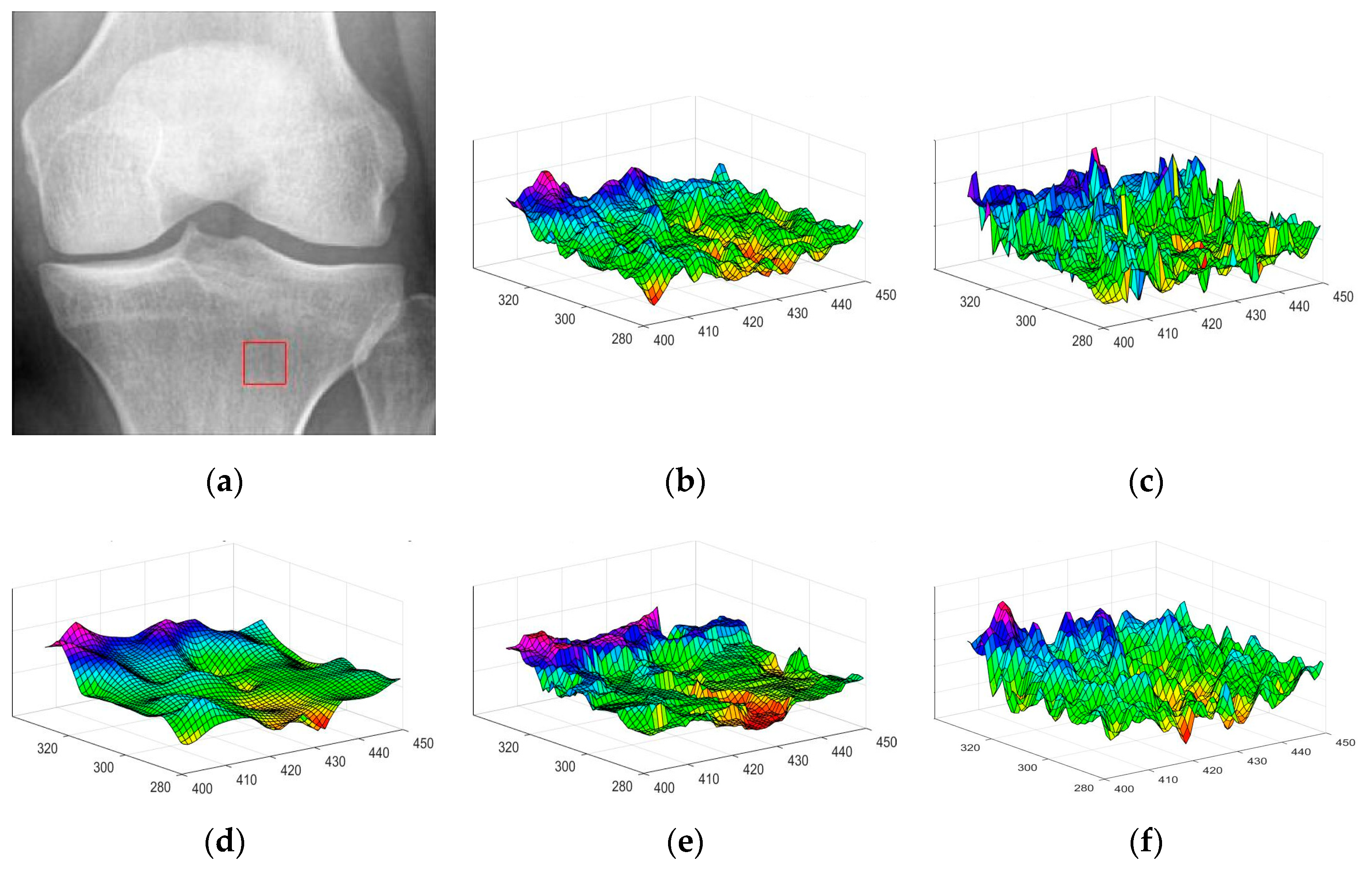
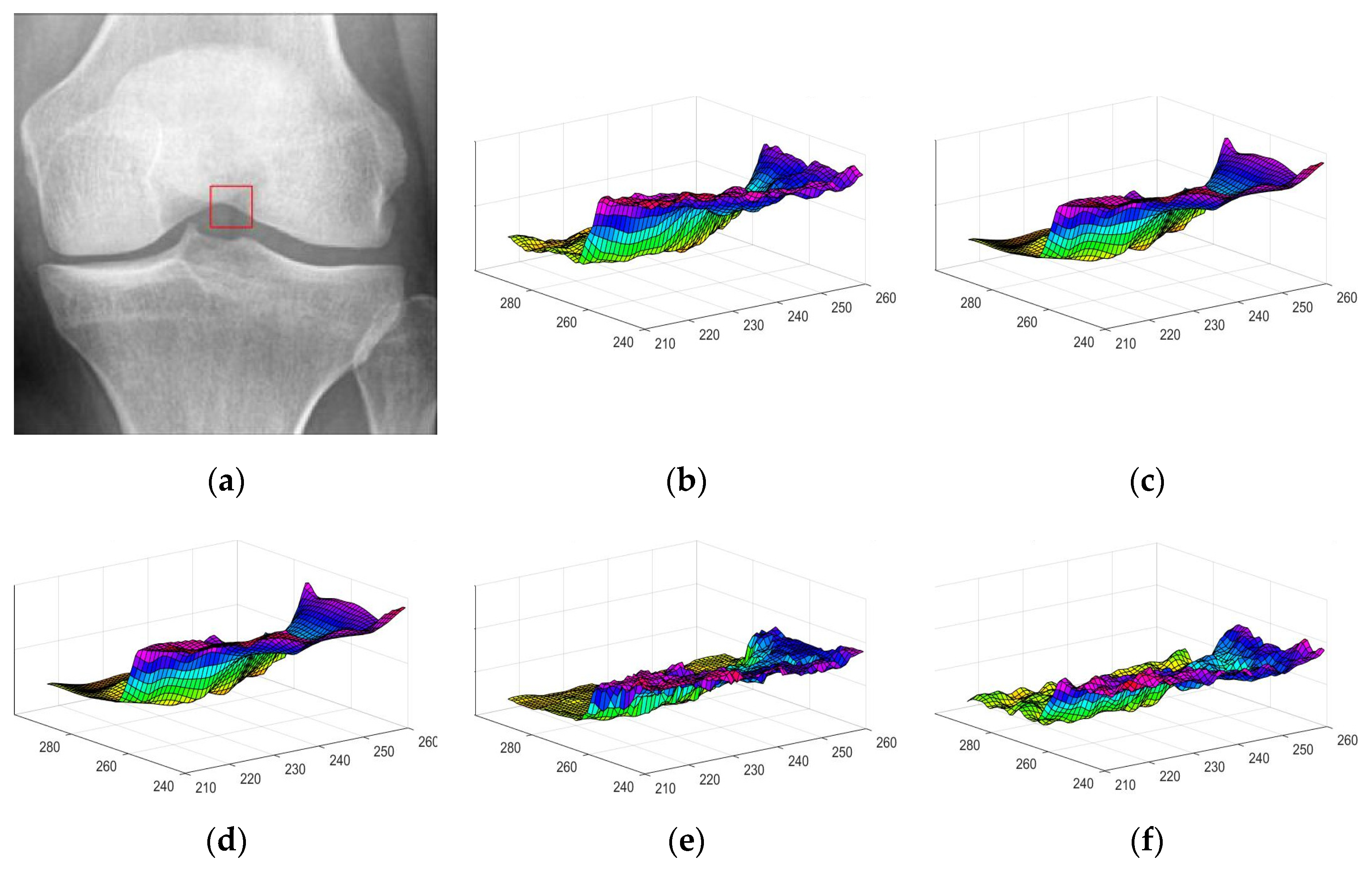
5.2. Numerical Simulations on Medical Images
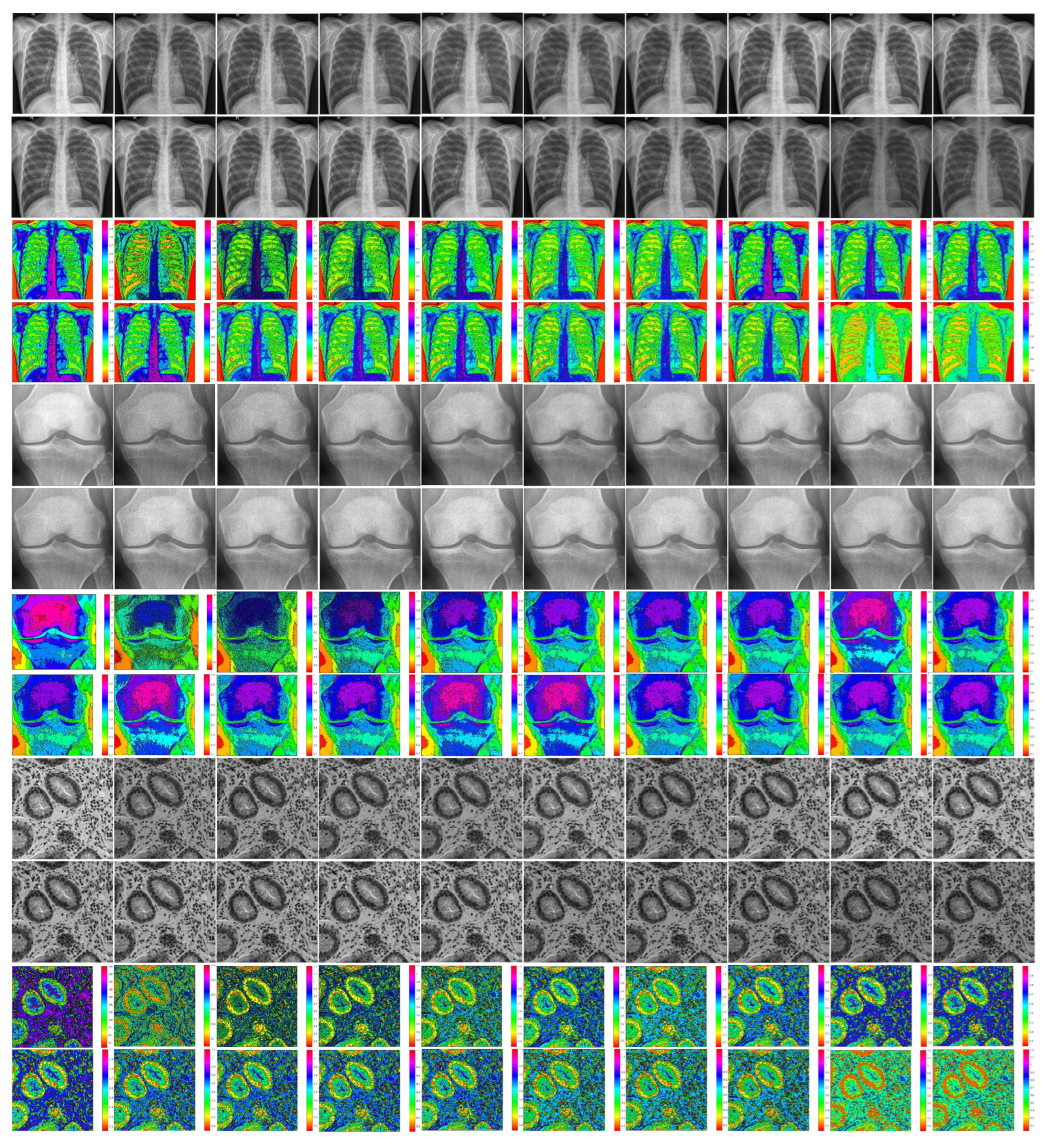
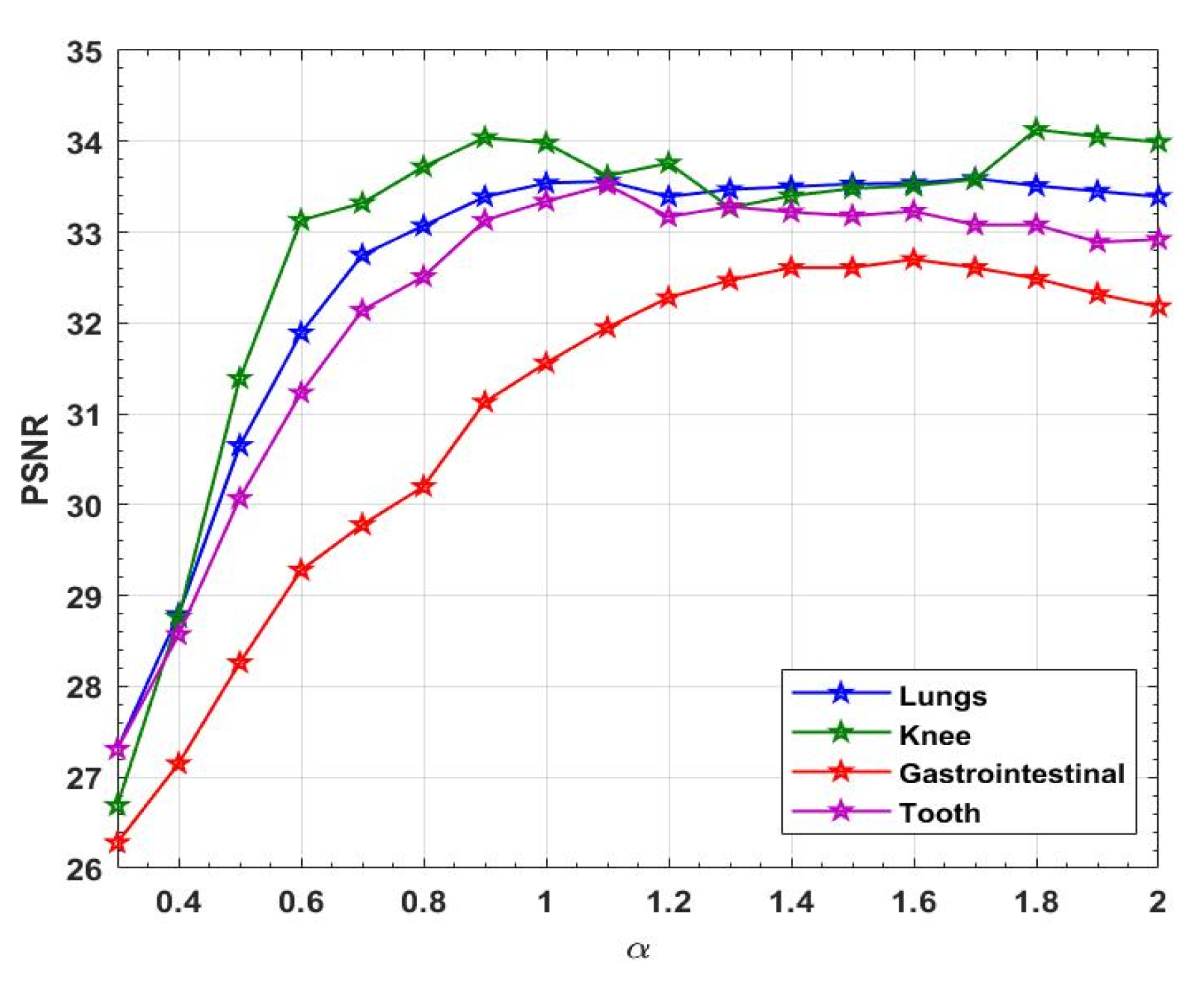
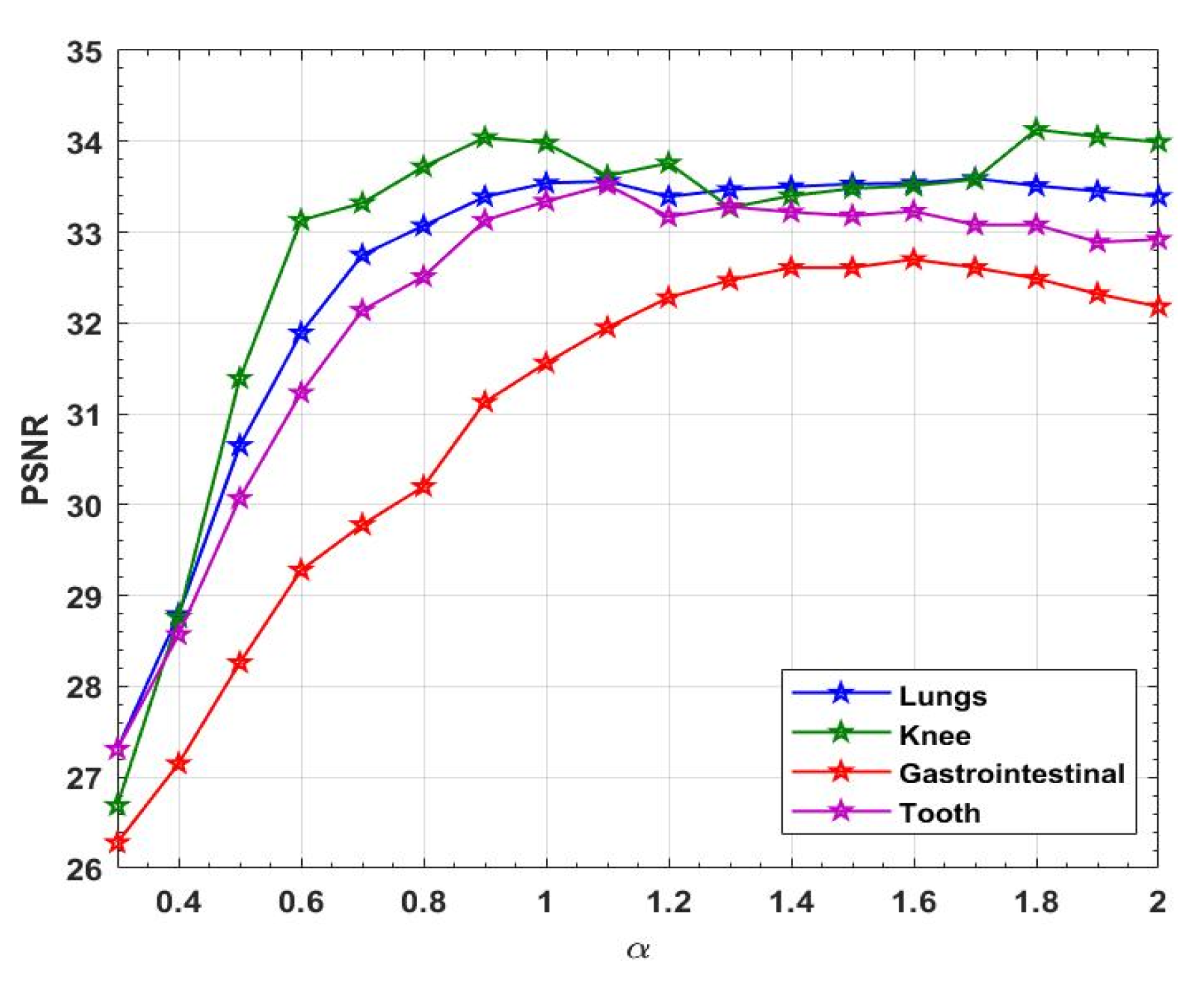
5.2.1. Experiments with Fractional Order and Regularization Parameter
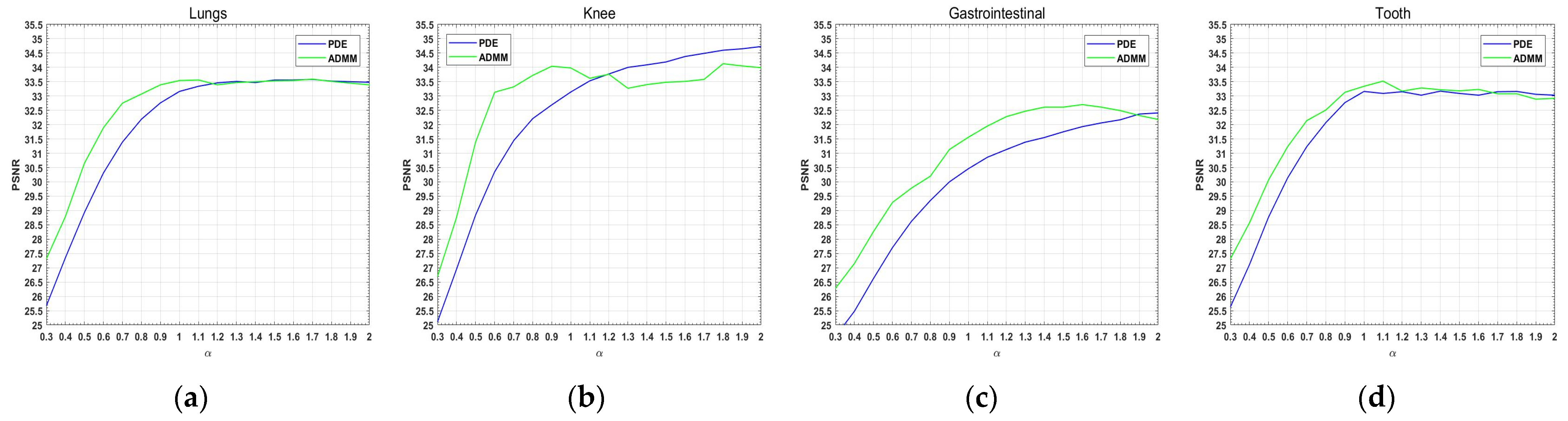
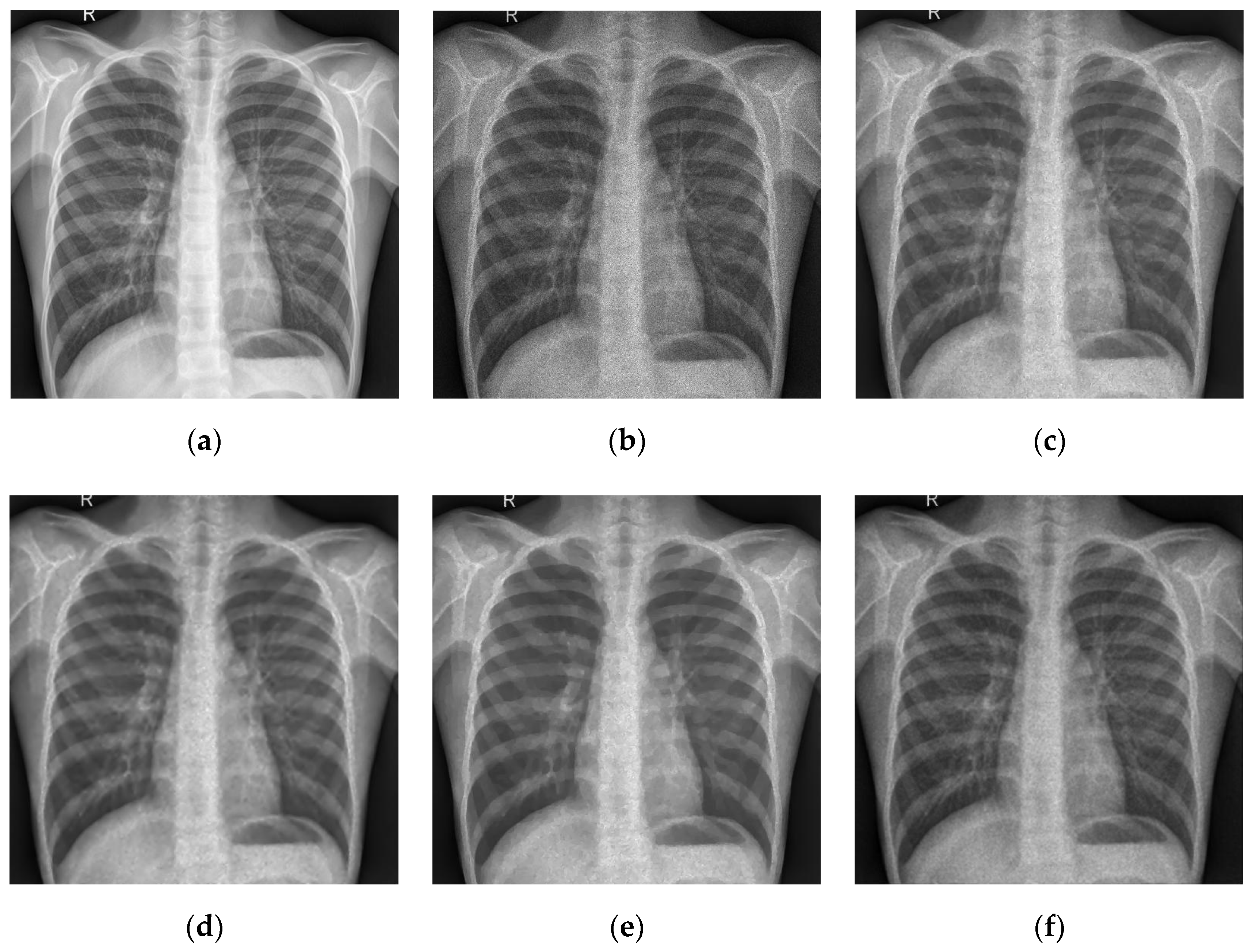
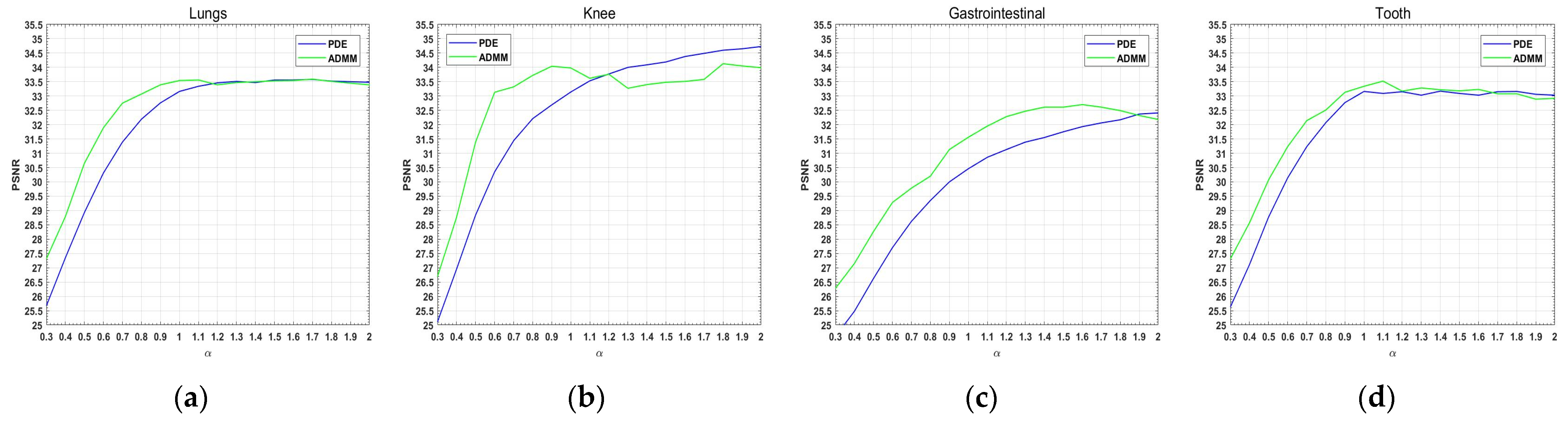
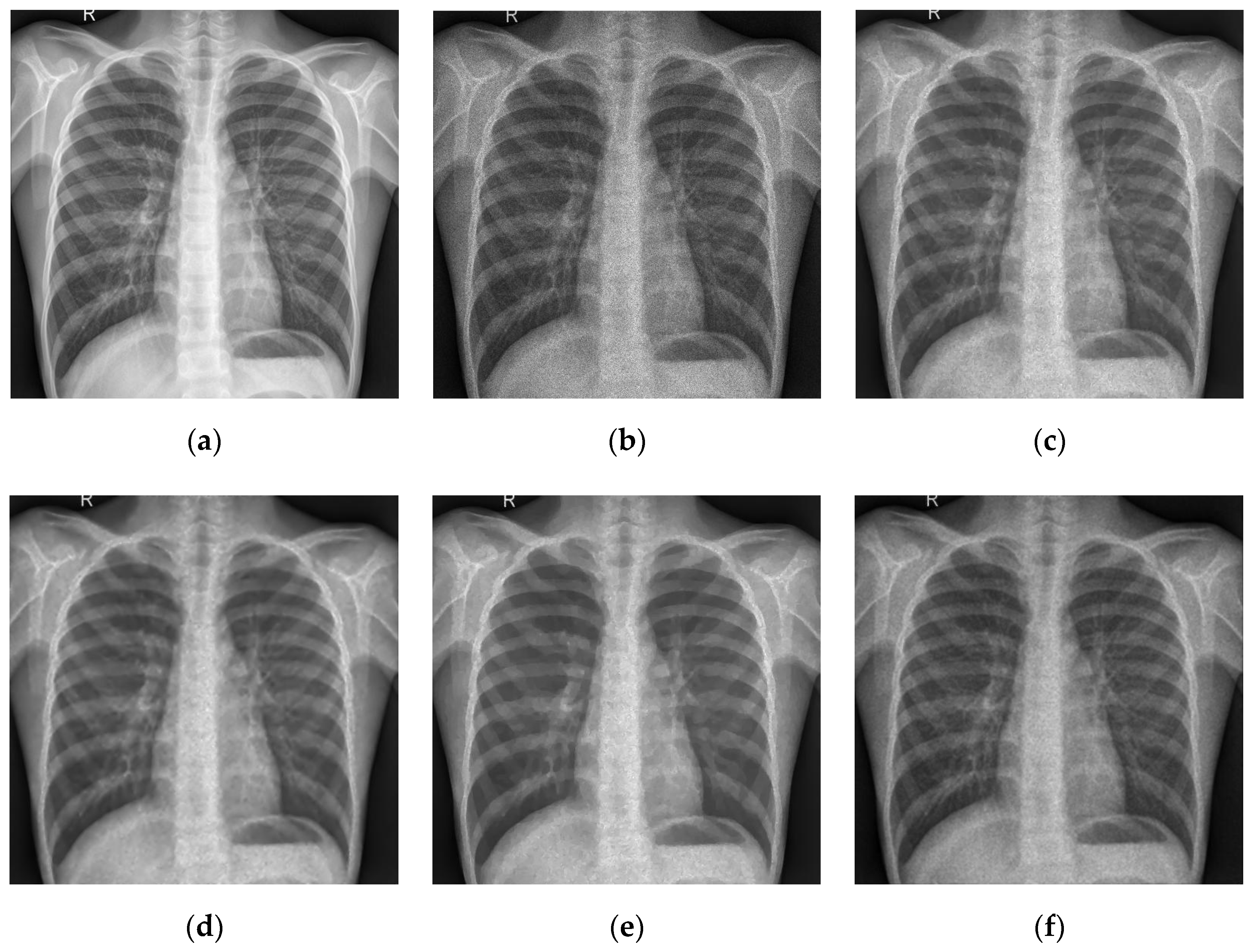
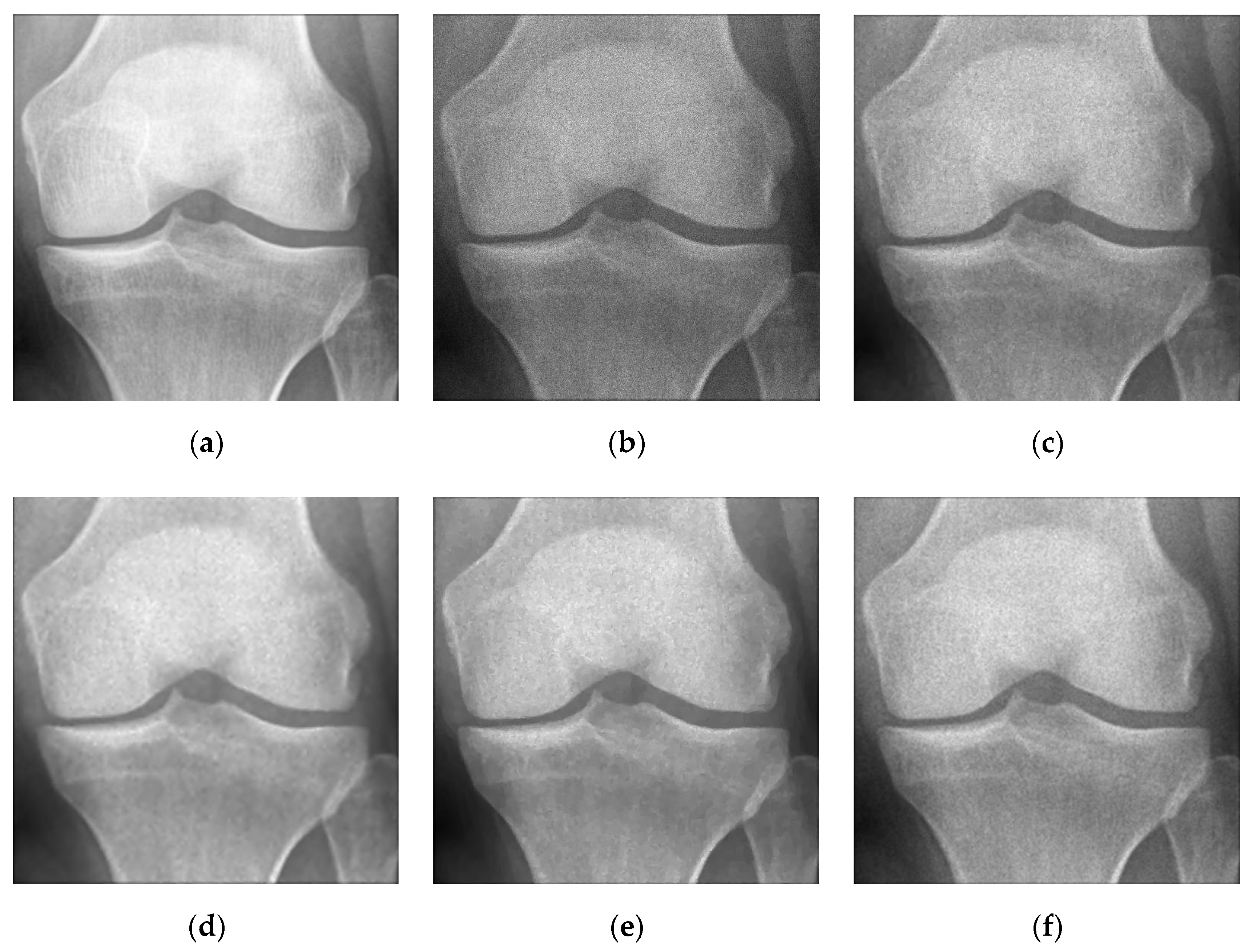
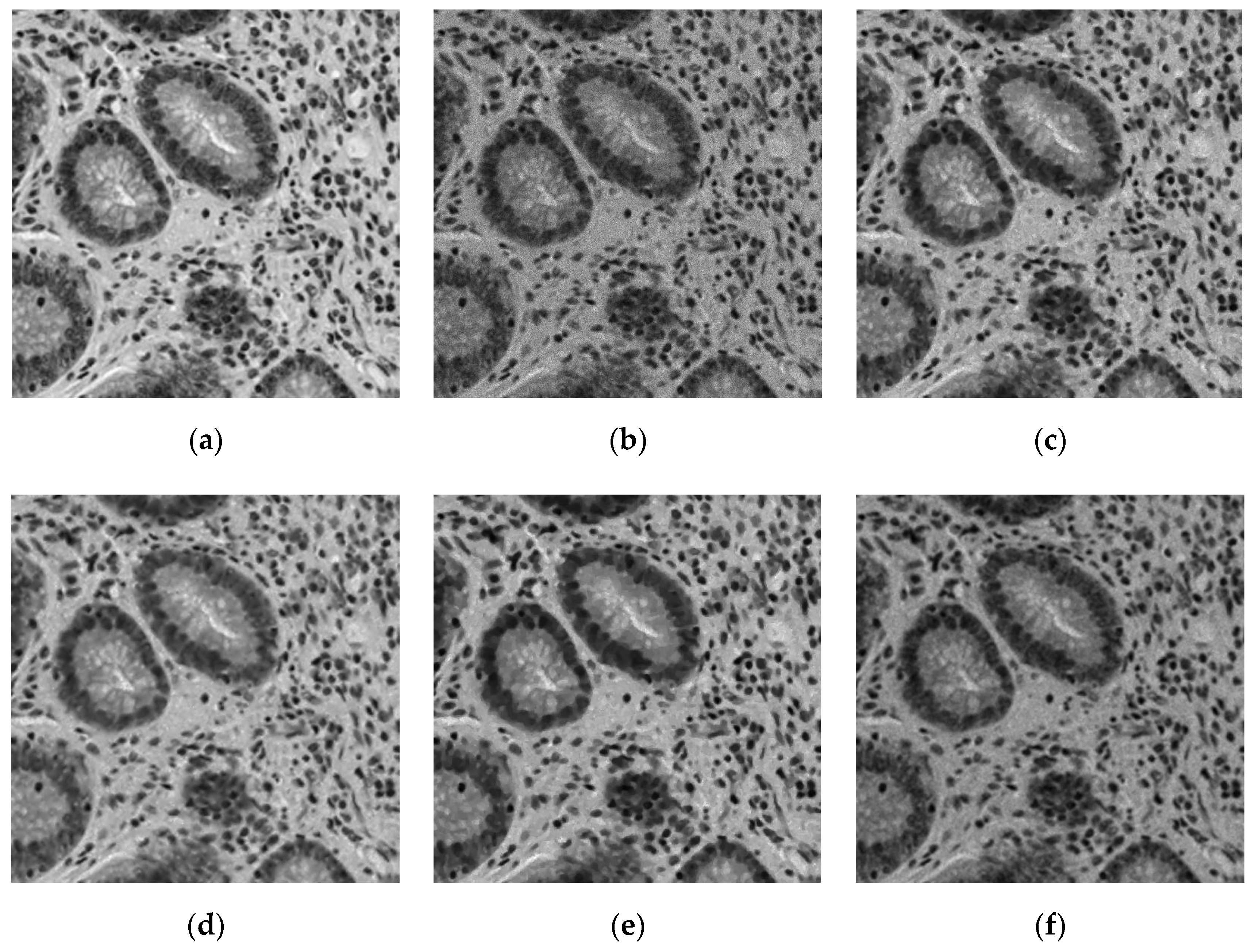
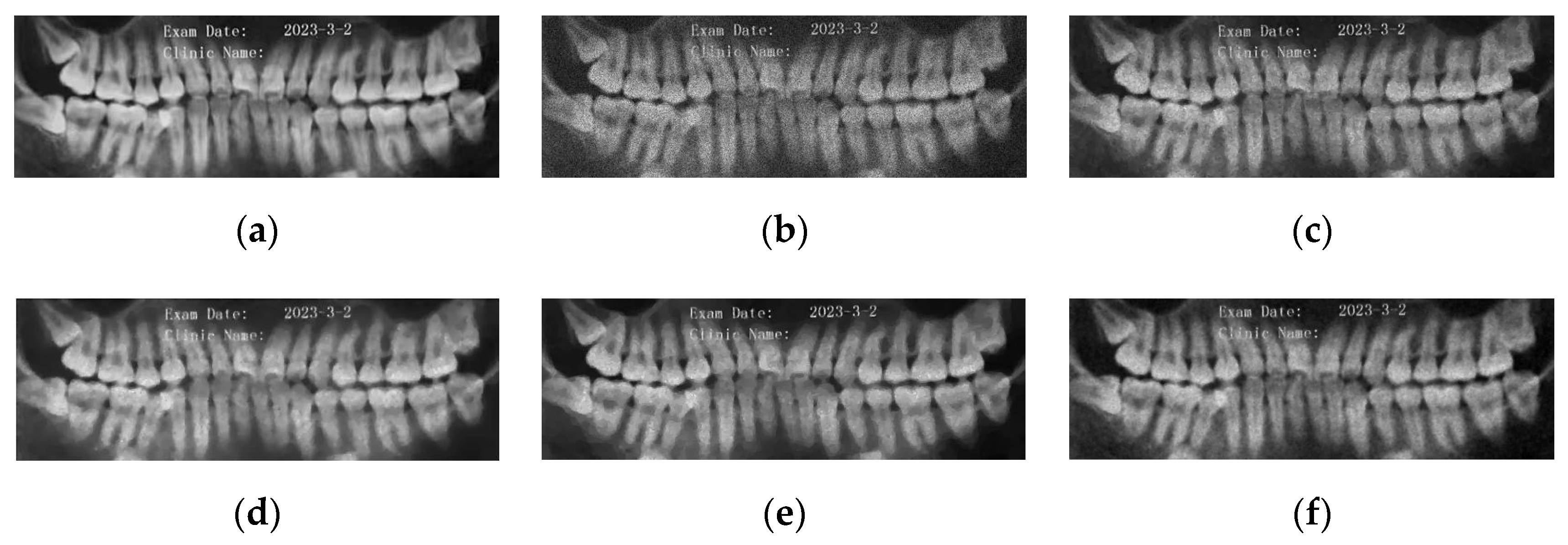
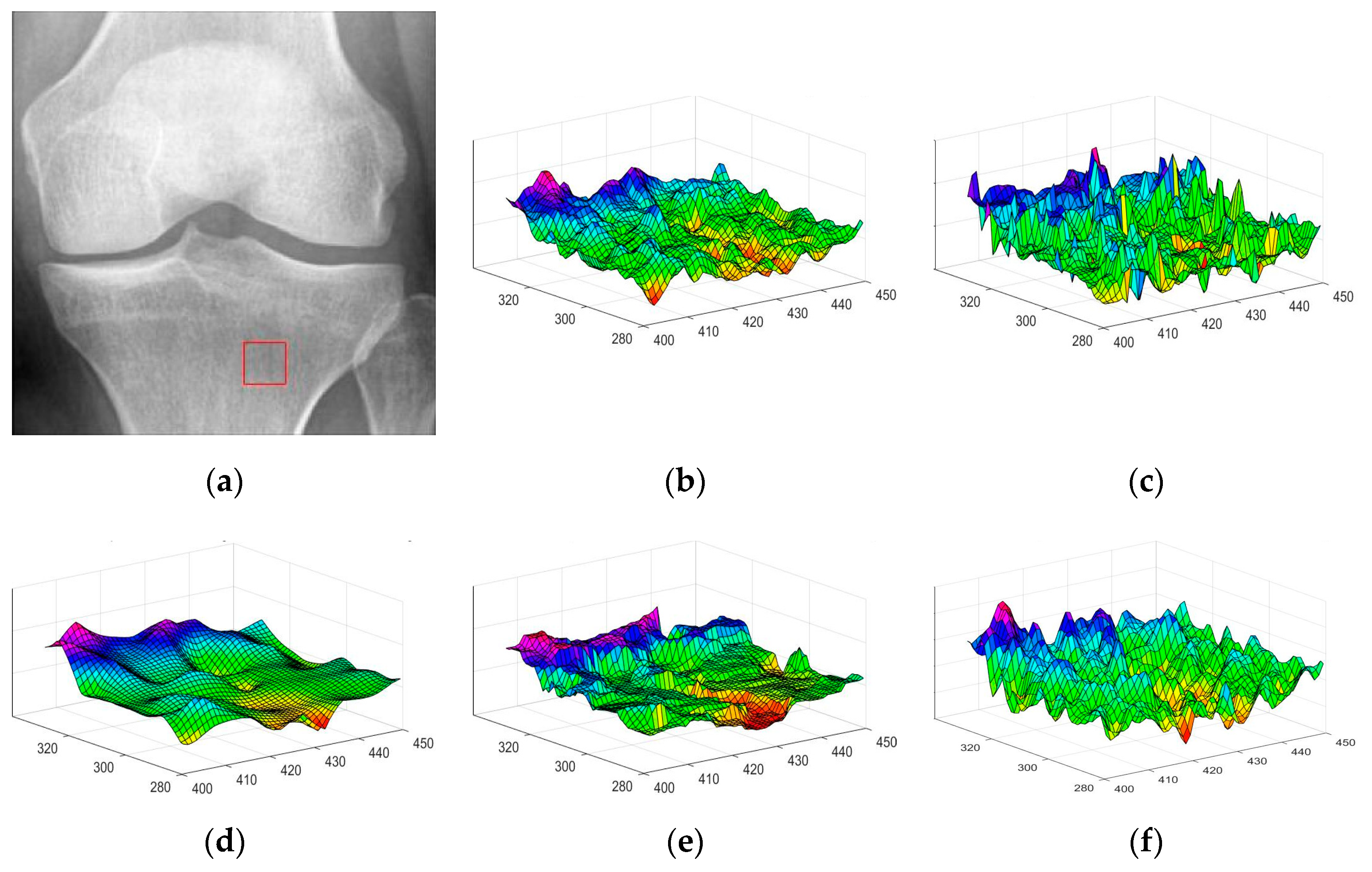
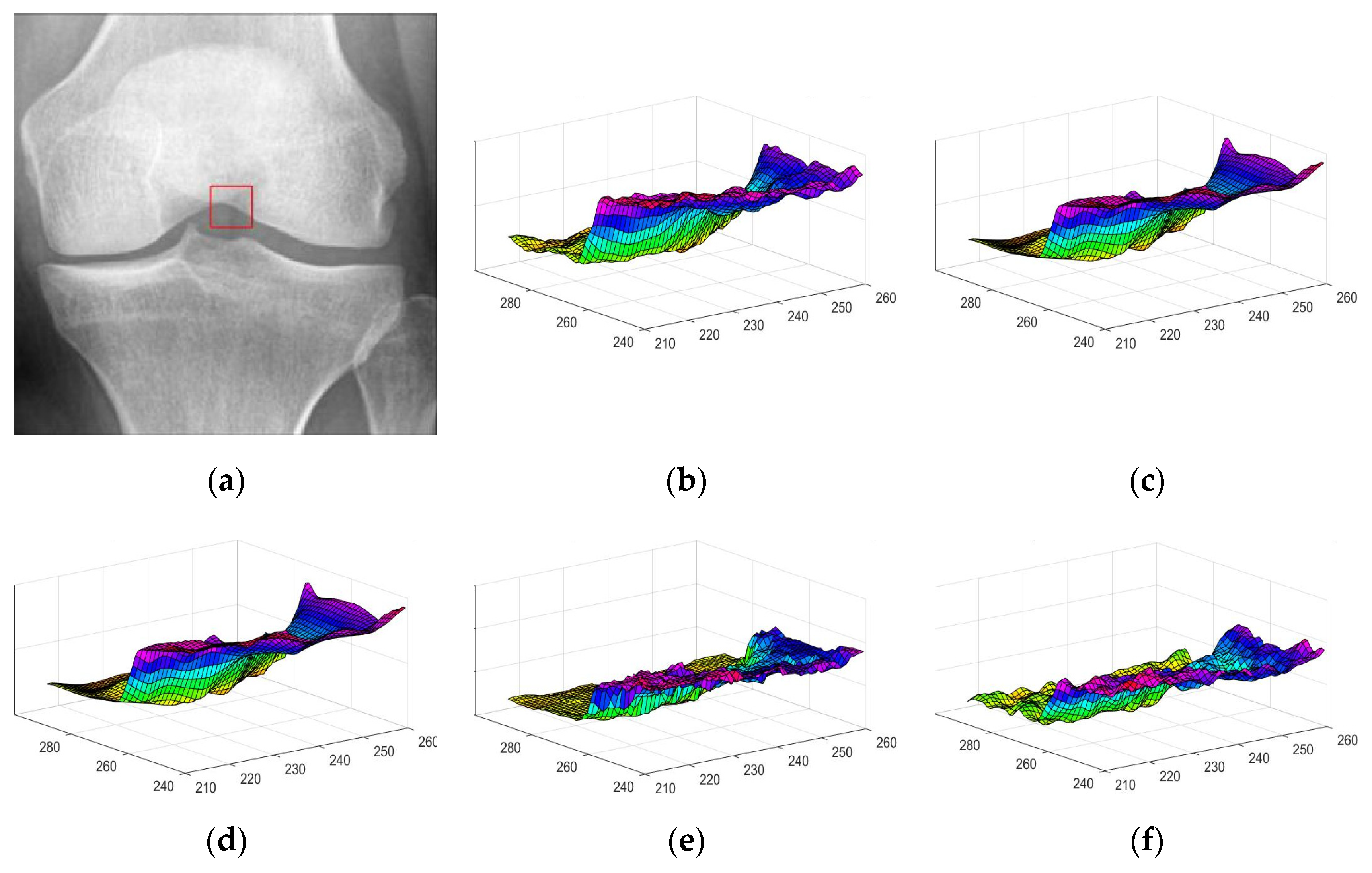
5.2.2. Different Methods
- Partial Differential Equation Method
- ADMM Method
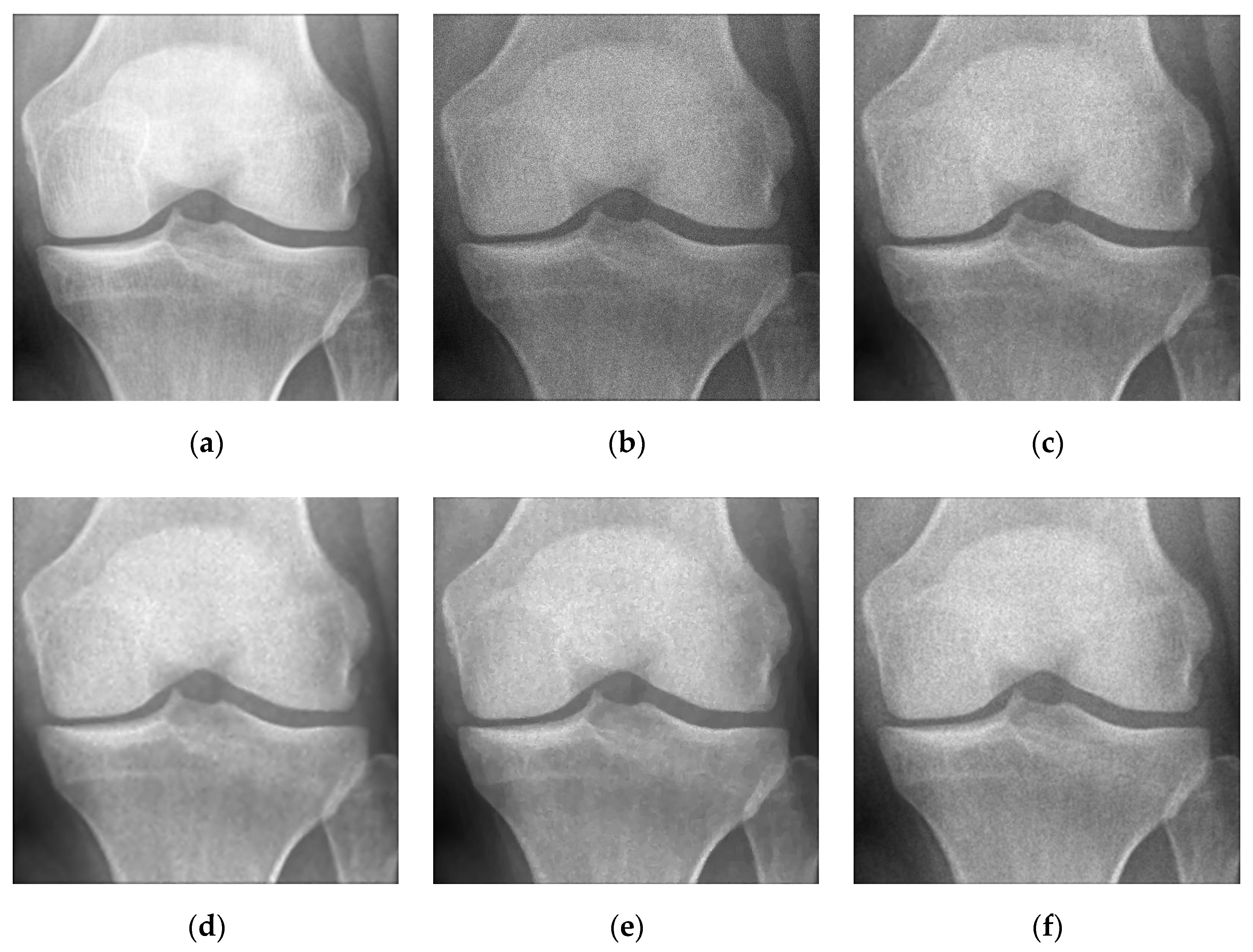
5.2.3. Comparison with Other Variational Models
5.3. Numerical Simulations on Natural Image
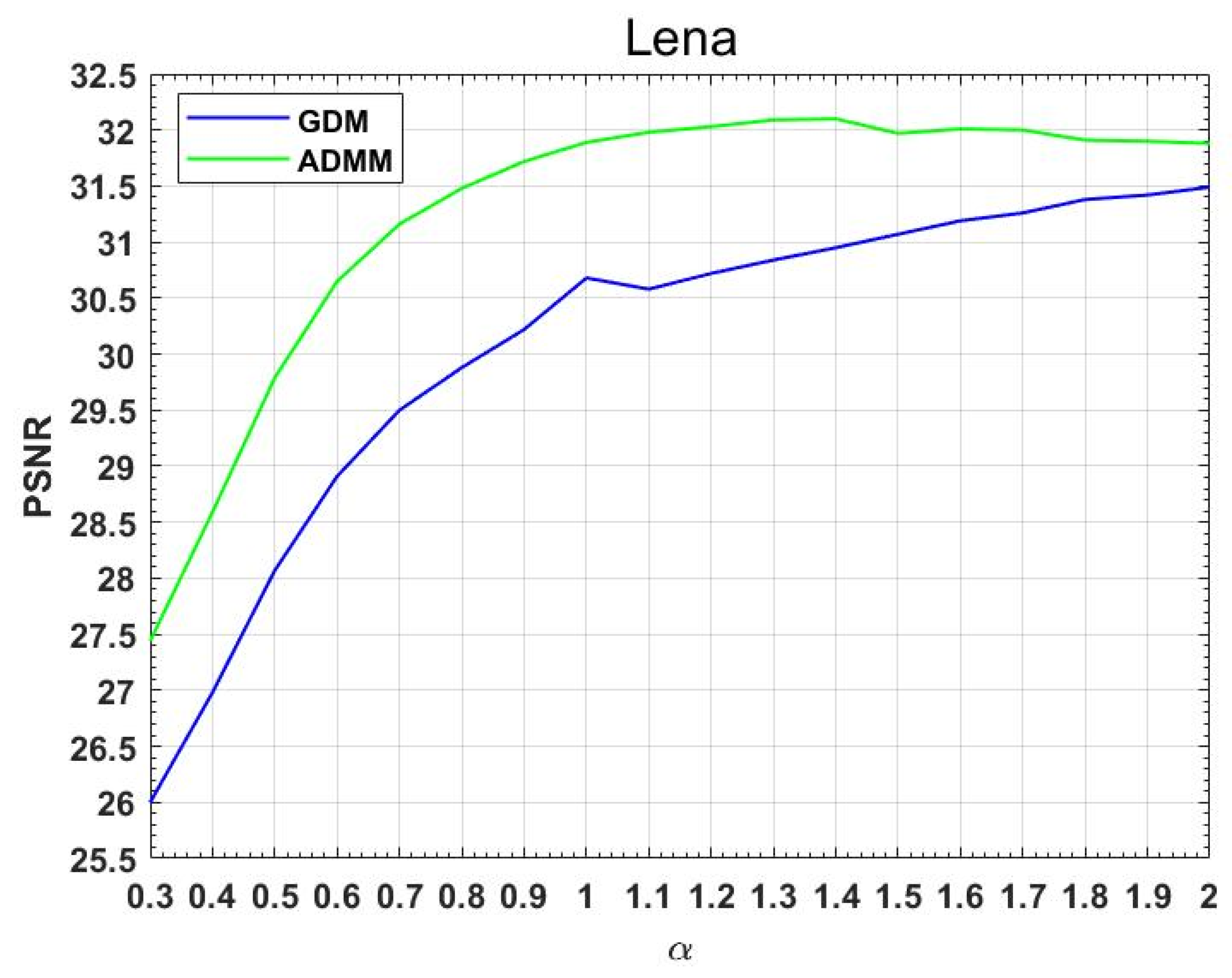
5.3.1. Different Methods
5.3.2. Comparison with Other Variational Models
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rudin, L.; Lions, P.L.; Osher, S. Multiplicative Denoising and Deblurring: Theory and Algorithms. In Geometric Level Set Methods in Imaging, Vision, and Graphics; Springer: New York, NY, USA, 2003; pp. 103–119. [Google Scholar]
- Liu, G.; Huang, T.Z.; Liu, J. High-order TVL1-based images restoration and spatially adapted regularization parameter selection. Comput. Math. Appl. 2014, 67, 2015–2026. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Figueiredo, M.A.T. Multiplicative Noise Removal Using Variable Splitting and Constrained Optimization. IEEE Trans. Image Process. 2009, 19, 1720–1730. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Figueiredo, M.A.T. Total variation restoration of speckled images using a split-bregman algorithm. In Proceedings of the 2009 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–10 November 2009; pp. 3717–3720. [Google Scholar]
- Teuber, T.; Lang, A. Nonlocal Filters for Removing Multiplicative Noise. In Proceedings of the Scale Space and Variational Methods in Computer Vision, Ein-Gedi, Israel, 29 May–2 June 2011. [Google Scholar]
- Shama, M.G. Multiplicative noise removal using complementary total generalized variation and nonlocal low rank regularization. Optik 2023, 291, 171374. [Google Scholar] [CrossRef]
- Lee, J.-S. Digital image enhancement and noise filtering by use of local statistics. IEEE Trans. Pattern Anal. Mach. Intell. 1980, 2, 165–168. [Google Scholar] [CrossRef]
- Achim, A.; Bezerianos, A.; Tsakalides, P. Novel Bayesian multiscale method for speckle removal in medical ultrasound images. IEEE Trans. Med. Imaging 2001, 20, 772–783. [Google Scholar] [CrossRef] [PubMed]
- Bai, J.; Feng, X.-C. Fractional-Order Anisotropic Diffusion for Image Denoising. IEEE Trans. Image Process. 2007, 16, 2492–2502. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Wei, Z. A class of fractional-order multi-scale variational models and alternating projection algorithm for image denoising. Appl. Math. Model. 2011, 35, 2516–2528. [Google Scholar]
- Chen, D.; Sun, S.; Zhang, C.; Chen, Y.; Xue, D. Fractional-order TV-l2 model for image denoising. Cent. Eur. J. Phys. 2013, 11, 1414–1422. [Google Scholar] [CrossRef]
- Tian, D.; Xue, D.; Wang, D. A fractional-order adaptive regularization primal-dual algorithm for image denoising. Inf. Sci. 2015, 296, 147–159. [Google Scholar] [CrossRef]
- Dong, F.; Chen, Y. A fractional-order derivative based variational framework for image denoising. Inverse Probl. Imaging 2016, 10, 27–50. [Google Scholar] [CrossRef]
- Li, X.; Meng, X.; Xiong, B. A fractional variational image denoising model with two-component regularization terms. Appl. Math. Comput. 2022, 427, 12178–12192. [Google Scholar] [CrossRef]
- Li, C.; He, C. Fractional-order diffusion coupled with integer-order diffusion for multiplicative noise removal. Comput. Math. Appl. 2023, 136, 34–43. [Google Scholar] [CrossRef]
- Lian, W.; Liu, X. Non-convex fractional-order TV model for impulse noise removal. J. Comput. Appl. Math. 2022, 417, 114615. [Google Scholar] [CrossRef]
- Weber, E.H. De Pulsu, Resorptione, Audita et Tactu, Annotationes Anatomicae et Physiologicae; Koehler: Leipzig, Germany, 1834. [Google Scholar]
- Shen, J. On the foundations of vision modeling: I. Weber’s Law Weberized TV Restor. Phys. D Nonlinear Phenom. 2003, 175, 241–251. [Google Scholar] [CrossRef]
- Xiao, L.; Huang, L.L.; Wei, Z.H. A weberized total variation regularization-based image multiplicative noise removal algorithm. EURASIP J. Adv. Signal Process. 2010, 2010, 490384. [Google Scholar] [CrossRef]
- Yu, X.; Zhao, D. A Weberized Total Variance Regularization-based Image Multiplicative Noise Model. Image Anal. Stereol. 2023, 42, 65–76. [Google Scholar] [CrossRef]
- Aubert, G.; Aujol, J.-F. A Variational Approach to Removing Multiplicative Noise. SIAM J. Appl. Math. 2008, 68, 925–946. Available online: https://www.jstor.org/stable/40233789 (accessed on 11 May 2023). [CrossRef]
- Shi, J.; Osher, S. A nonlinear inverse scale space method for a convex multiplicative noise model. SIAM J. Imaging Sci. 2008, 1, 294–321. [Google Scholar] [CrossRef]
- Steifdl, G.; Teuber, T. Removing Multiplicative Noise by Douglas-Rachford Splitting Methods. J. Math. Imaging Vis. 2010, 36, 168–184. [Google Scholar] [CrossRef]
- Powell, M.J.D. A Method for Nonlinear Constraints in Minimization Problems; Academic Press: New York, NY, USA, 1969. [Google Scholar]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Now 2011, 3, 1–22. [Google Scholar] [CrossRef]
- Cai, J.-F.; Osher, S.; Shen, Z. Split Bregman Methods and Frame Based Image Restoration. Multiscale Model. Simul. 2009, 8, 337–369. [Google Scholar] [CrossRef]
- Chan, S.H.; Wang, X.; Elgendy, O.A. Plug-and-Play ADMM for Image Restoration: Fixed-Point Convergence and Applications. IEEE Trans. Comput. Imaging 2016, 3, 84–98. [Google Scholar] [CrossRef]
- Shapiro, J.M. Embedded image coding using zerotrees of wavelet coefficients. IEEE Trans. Signal Process. 1993, 41, 3445–3462. [Google Scholar] [CrossRef]
- Giusti, E. Minimal Surfaces and Functions of Bounded Variation; Springer Science and Business Media LLC: Dordrecht, The Netherlands, 1984. [Google Scholar]
- Aubert, G.; Kornprobst, P. Mathematical Problems in Image Processing: Partial Difierential Equations and the Calculus of Variations; Springer: Berlin/Heidelberg, Germany, 2006; p. 147. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | Lungs | Knee | Gastrointestinal | Tooth | ||||
|---|---|---|---|---|---|---|---|---|
| Fractional Orders | PDE | ADMM | PDE | ADMM | PDE | ADMM | PDE | ADMM |
| 0.3 | 25.67 | 27.31 | 25.10 | 26.69 | 24.60 | 26.28 | 25.63 | 27.31 |
| 0.4 | 27.35 | 28.79 | 26.94 | 28.76 | 25.48 | 27.15 | 27.11 | 28.57 |
| 0.5 | 28.93 | 30.65 | 28.83 | 31.39 | 26.62 | 28.26 | 28.77 | 30.07 |
| 0.6 | 30.31 | 31.89 | 30.34 | 33.13 | 27.70 | 29.28 | 30.14 | 31.23 |
| 0.7 | 31.39 | 32.75 | 31.43 | 33.32 | 28.62 | 29.78 | 31.23 | 32.14 |
| 0.8 | 32.19 | 33.07 | 32.20 | 33.72 | 29.35 | 30.20 | 32.07 | 32.51 |
| 0.9 | 32.76 | 33.39 | 32.68 | 34.04 | 30.00 | 31.13 | 32.77 | 33.13 |
| 1.0 | 33.16 | 33.54 | 33.13 | 33.98 | 30.46 | 31.56 | 33.16 | 33.34 |
| 1.1 | 33.34 | 33.56 | 33.52 | 33.62 | 30.86 | 31.95 | 33.09 | 33.52 |
| 1.2 | 33.46 | 33.39 | 33.76 | 33.76 | 31.13 | 32.28 | 33.15 | 33.17 |
| 1.3 | 33.51 | 33.47 | 33.99 | 33.27 | 31.39 | 32.47 | 33.03 | 33.28 |
| 1.4 | 33.47 | 33.50 | 34.08 | 33.40 | 31.55 | 32.61 | 33.17 | 33.22 |
| 1.5 | 33.56 | 33.53 | 34.18 | 33.48 | 31.75 | 32.61 | 33.09 | 33.18 |
| 1.6 | 33.56 | 33.54 | 34.37 | 33.51 | 31.93 | 32.70 | 33.03 | 33.23 |
| 1.7 | 33.58 | 33.59 | 34.48 | 33.58 | 32.06 | 32.61 | 33.15 | 33.08 |
| 1.8 | 33.52 | 33.51 | 34.59 | 34.13 | 32.17 | 32.49 | 33.16 | 33.08 |
| 1.9 | 33.50 | 33.45 | 34.64 | 34.05 | 32.37 | 32.32 | 33.06 | 32.89 |
| 2.0 | 33.48 | 33.39 | 34.72 | 33.99 | 32.41 | 32.18 | 33.03 | 32.92 |
| σ = 0.1 | ||||||||
| I-div | FI-div | WI-div | FWI-div | |||||
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| Lungs | 31.50 | 0.7876 | 33.98 | 0.8675 | 33.25 | 0.8437 | 33.59 | 0.8538 |
| Knee | 31.52 | 0.7319 | 36.04 | 0.9180 | 34.73 | 0.8589 | 34.73 | 0.8591 |
| Gastrointestinal | 29.92 | 0.8454 | 32.70 | 0.9163 | 30.72 | 0.8732 | 32.70 | 0.9165 |
| Tooth | 31.70 | 0.8384 | 33.38 | 0.8858 | 33.07 | 0.8979 | 33.52 | 0.8958 |
| σ = 0.2 | ||||||||
| I-div | FI-div | WI-div | FWI-div | |||||
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| Lungs | 23.31 | 0.4726 | 27.95 | 0.6953 | 25.57 | 0.5936 | 25.77 | 0.5978 |
| Knee | 22.60 | 0.3184 | 27.78 | 0.6246 | 25.01 | 0.4608 | 25.28 | 0.4694 |
| Gastrointestinal | 22.38 | 0.5700 | 26.82 | 0.7658 | 24.33 | 0.6573 | 24.98 | 0.6944 |
| Tooth | 23.62 | 0.4842 | 27.05 | 0.6992 | 26.10 | 0.6541 | 25.56 | 0.5784 |
| PDE | ADMM | |
|---|---|---|
| PSNR | PSNR | |
| 0.3 | 26.00 | 27.44 |
| 0.4 | 26.98 | 28.59 |
| 0.5 | 28.07 | 29.79 |
| 0.6 | 28.91 | 30.65 |
| 0.7 | 29.50 | 31.16 |
| 0.8 | 29.88 | 31.48 |
| 0.9 | 30.22 | 31.72 |
| 1.0 | 30.68 | 31.89 |
| 1.1 | 30.58 | 31.98 |
| 1.2 | 30.72 | 32.03 |
| 1.3 | 30.84 | 32.09 |
| 1.4 | 30.5 | 32.10 |
| 1.5 | 31.07 | 31.97 |
| 1.6 | 31.19 | 32.01 |
| 1.7 | 31.26 | 32.00 |
| 1.8 | 31.38 | 31.91 |
| 1.9 | 31.42 | 31.90 |
| 2.0 | 31.49 | 31.88 |
| σ = 0.1 | ||||||||
| I-div | FI-div | WI-div | FWI-div | |||||
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| Lena | 32.38 | 0.8541 | 32.44 | 0.8547 | 32.21 | 0.8536 | 32.10 | 0.8259 |
| σ = 0.2 | ||||||||
| I-div | FI-div | WI-div | FWI-div | |||||
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| Lena | 26.72 | 0.6329 | 28.12 | 0.7047 | 26.56 | 0.6344 | 28.59 | 0.7067 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Zhao, D. A Non-Convex Fractional-Order Differential Equation for Medical Image Restoration. Symmetry 2024, 16, 258. https://doi.org/10.3390/sym16030258
Li C, Zhao D. A Non-Convex Fractional-Order Differential Equation for Medical Image Restoration. Symmetry. 2024; 16(3):258. https://doi.org/10.3390/sym16030258
Chicago/Turabian StyleLi, Chenwei, and Donghong Zhao. 2024. "A Non-Convex Fractional-Order Differential Equation for Medical Image Restoration" Symmetry 16, no. 3: 258. https://doi.org/10.3390/sym16030258
APA StyleLi, C., & Zhao, D. (2024). A Non-Convex Fractional-Order Differential Equation for Medical Image Restoration. Symmetry, 16(3), 258. https://doi.org/10.3390/sym16030258