


Comparison of Selected Numerical Methods for Solving Integro-Differential Equations with the Cauchy Kernel



Abstract
1. Introduction
2. Proposed Solution Methods
2.1. Method Using Taylor Series
2.2. Approach with Metaheuristic Optimization Algorithms
3. Metaheuristic Algorithms for Optimization Problems
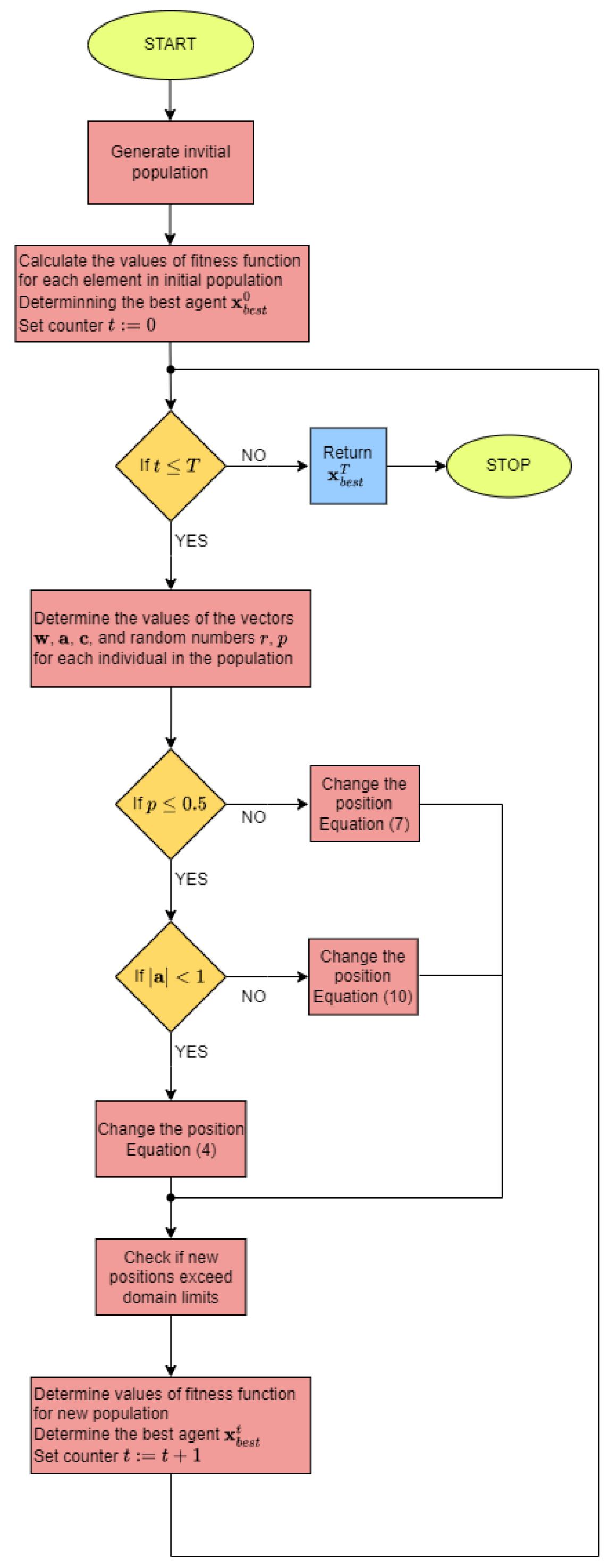
3.1. Whale Optimization Algorithm
- In each of iteration (t is number of iteration), the best individual in the population is determined. This individual’s position is closest to the prey, and other individuals move towards it according to the following formulaswhere are vectors of random coefficients, is an individual in population t, and is a scaled vector of distance between an individual and the best individual in the population. The operation ∗ means multiplying vectors element by element. Vectors , are calculated in following waywhere is a vector of random numbers in the range , and is a vector of numbers decreasing from iteration to iteration from 2 to 0. The values of the vector in a fixed iteration t are assumed to be , where T is the maximum number of iterations. Decreasing the parameter in each iteration simulates the process of narrowing the space to search for a victim. This technique is called shrinking encircling mechanism.
- The next important stage is the mechanism of spiral-shaped movement of whales. Mathematically, we describe this process with the following formulawhere is the distance vector between the current individual and the best individual in the population, b is a constant (parameter of the algorithm), and r is a random number in the range .
- Whales move using both a shrinking encircling mechanism and a spiral-shaped movement. In the algorithm, this behavior is simulated by the formulaIn the above formula , therefore, there is a chance of making each move. It is possible to control behavior of the algorithm by the level of probability p. Standard approach assumes a level of .
- During the exploration phase, whales behave similarly to in Equation (4), with the difference that for the vector , we assume , which simulates the exploration phase and the whales move along with a random individual in the population, not the best individual. This stage of the algorithm is described mathematically by the formulaswhere denotes the position of a random whale in the population t.
- The vector , whose values change from iteration to iteration in the range from 2 to 0, is responsible for the transition from the exploration phase to the exploitation phase. For values of the vector in the range , there is an exploration phase, while for the range , there is an exploitation phase.
| Algorithm 1: Pseudocode of WOA |
 |
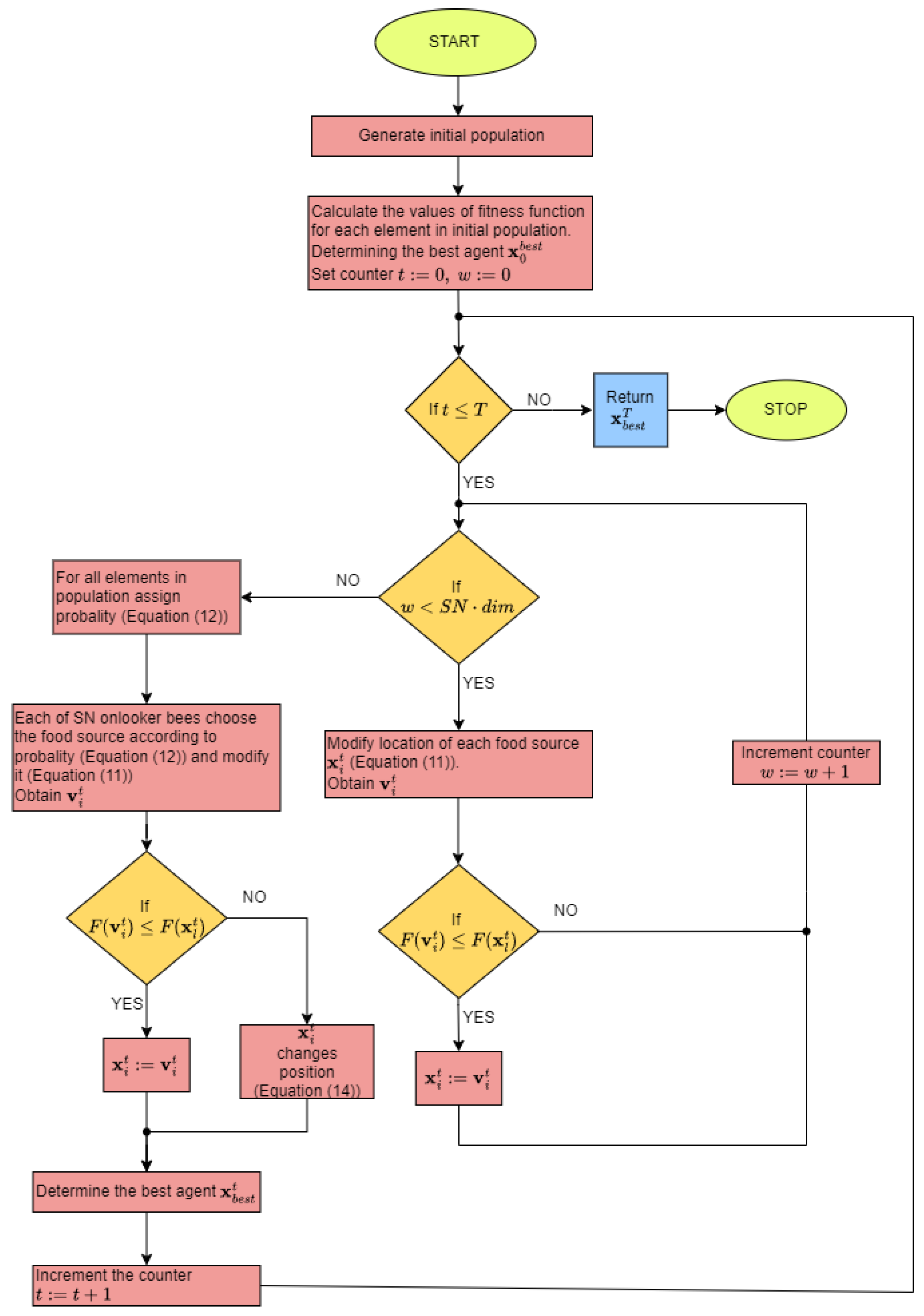
3.2. Artificial Bee Colony
- working bees—these are bees whose job is to look for a food source. Important information for these bees consists of the following: the distance between the hive and the food source, the direction the bee should follow to reach the food source and the amount of nectar in the source.
- bees unclassified—these are bees that search for new food sources. We can divide them into two groups: scouts and onlookers. Scouts, after leaving a food source, look for another one in randomly way, while viewers look for visited sources based on the information provided.
- abandons the source, becomes an onlooker and watches the bees conveying information,
- transmits information through dance and recruits other bees,
- continues to explore on its own, without hiring other bees.
- the locations of food sources correspond to potential solutions of the optimized problem.
- the quantity of nectar in the source corresponds to the quality of the solution.
- the number of working bees is equal to the number of onlookers, which is denoted by SN.
- Food sources are modified according to the formulawhere is the random index, is a vector of randomly generated numbers in the range , the operation ∗ means multiplying the vector “element by element”, denotes i-th solution from the population in the t-th iteration and denotes i-th the modified solution from the population in the t-th iteration.Compare positions with . If . The position of in the population t is then replaced by . Otherwise, the position remains in the population.
- Each item in population is assigned a probability according to the formulawhere
- Each onlooker bee selects one source according to the probability and starts searching near it according to the Formula (11). Then the bee compares two locations—the new and previous one.
- If, after performing the previous step of the algorithm, any of the food sources have not changed their position, then they are omitted and replaced with a new random sourcewhere is a vector of random numbers in the range , and , are vectors of constraints, respectively lower and upper limits of the search space domain.
| Algorithm 2: Pseudocode of ABC |
 |
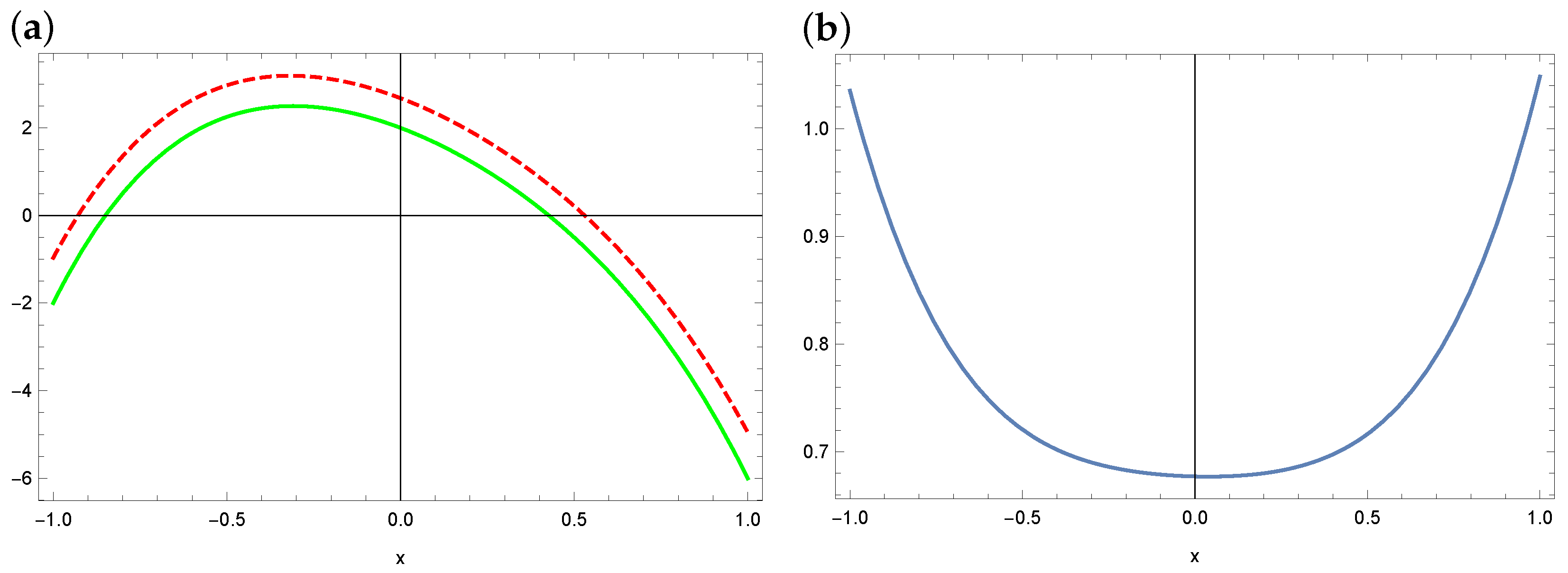
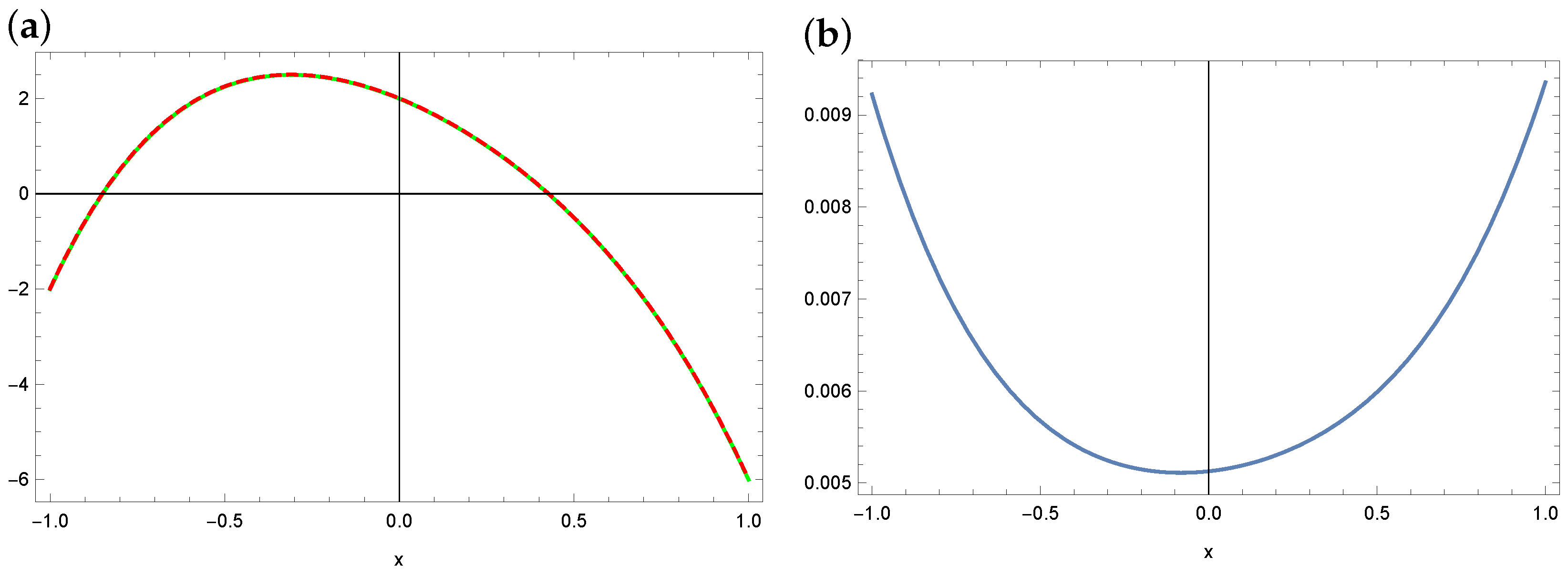
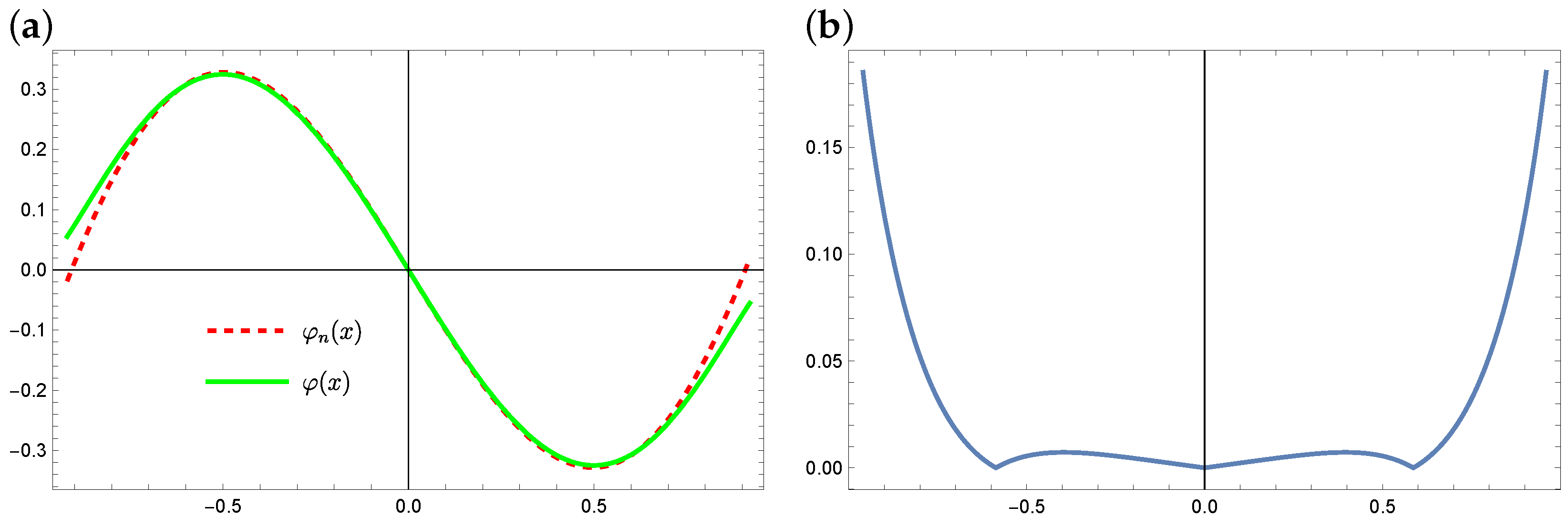
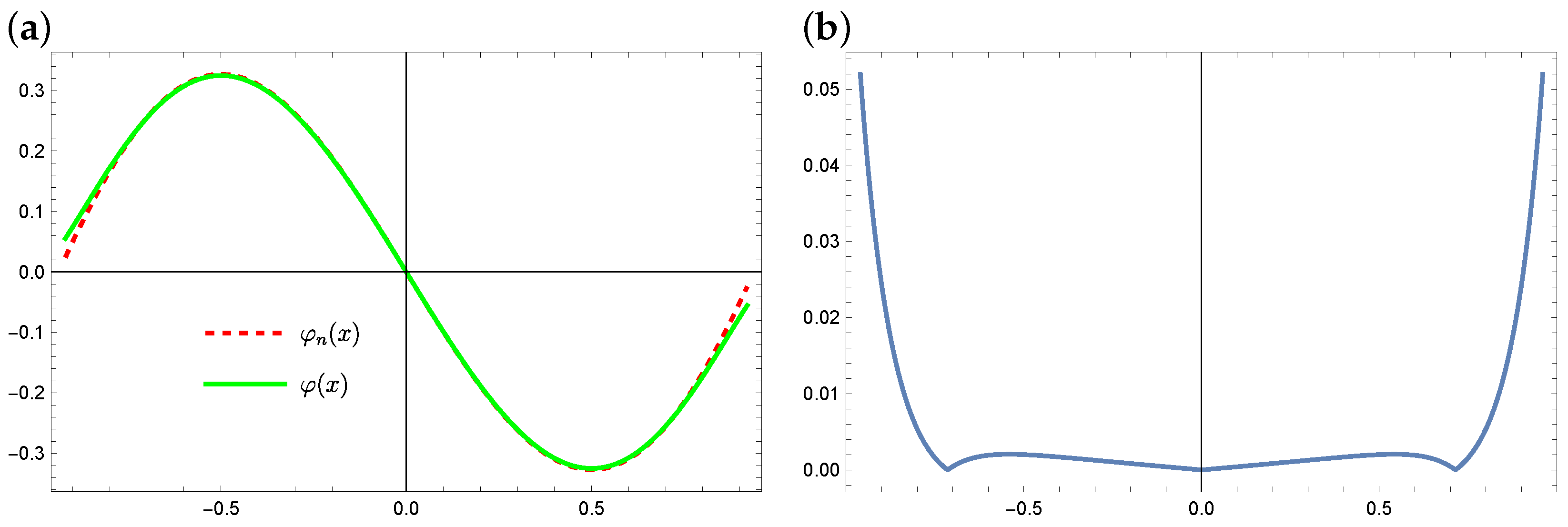
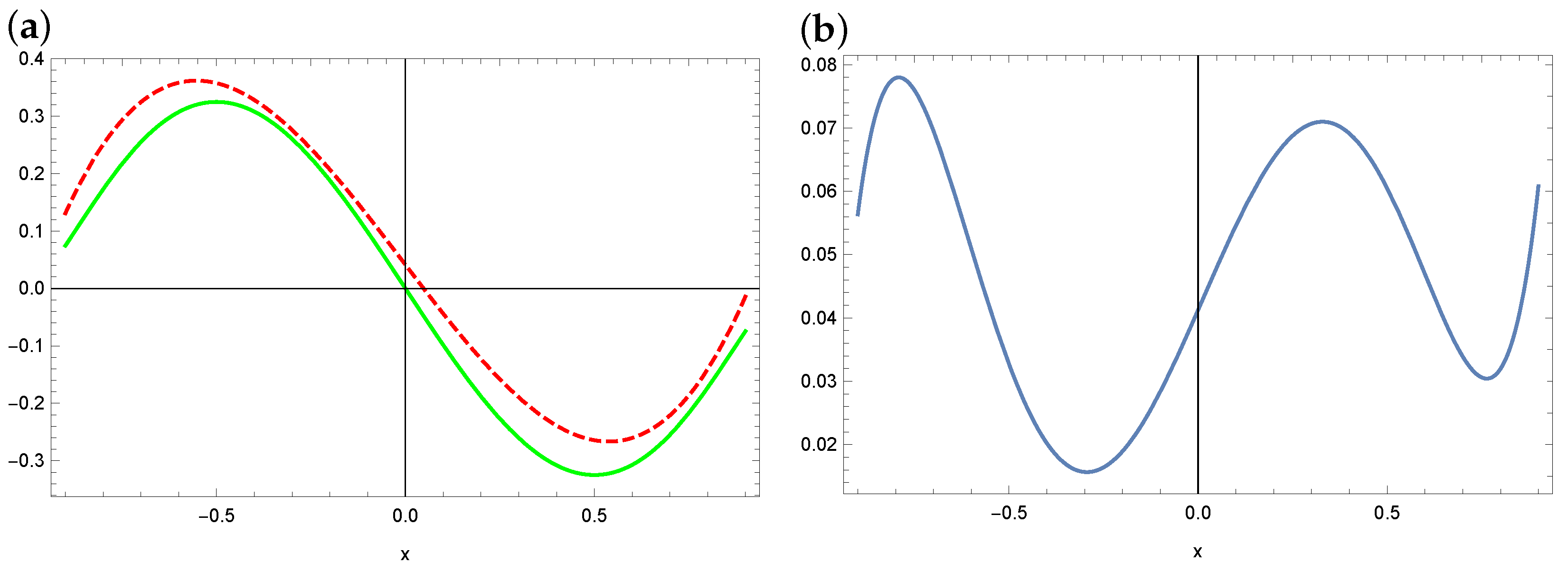
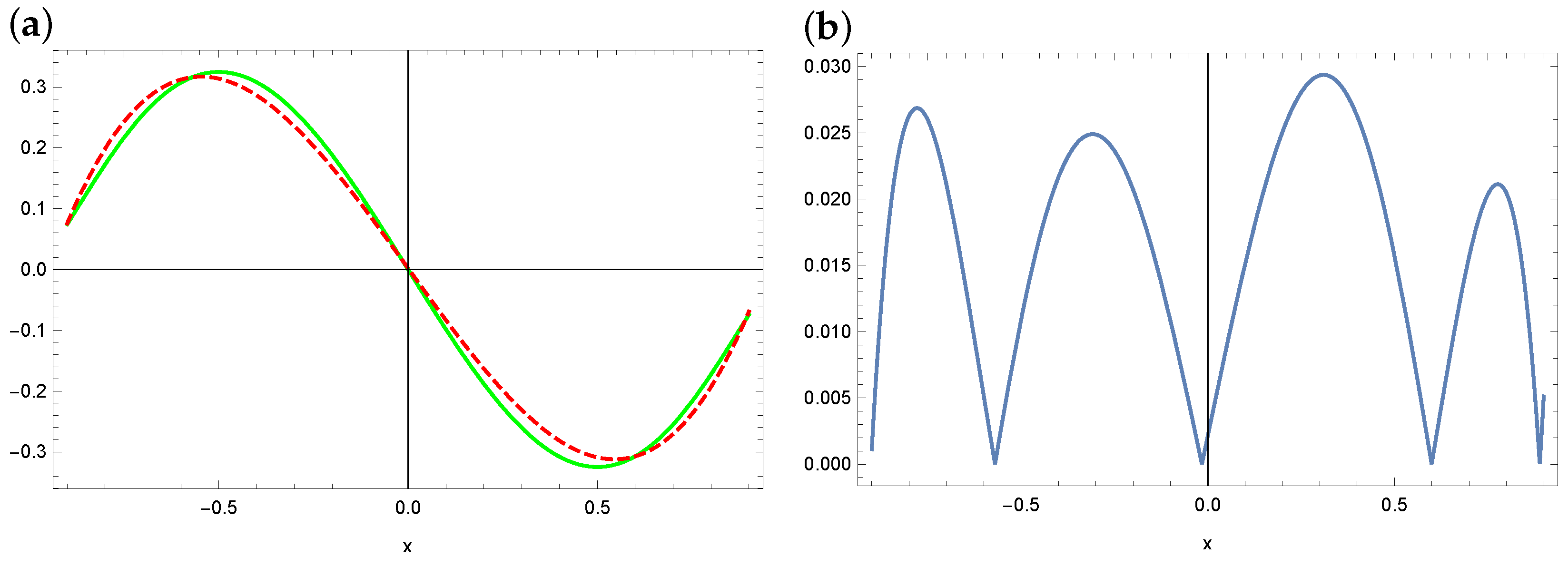
4. Numerical Examples
4.1. Example 1
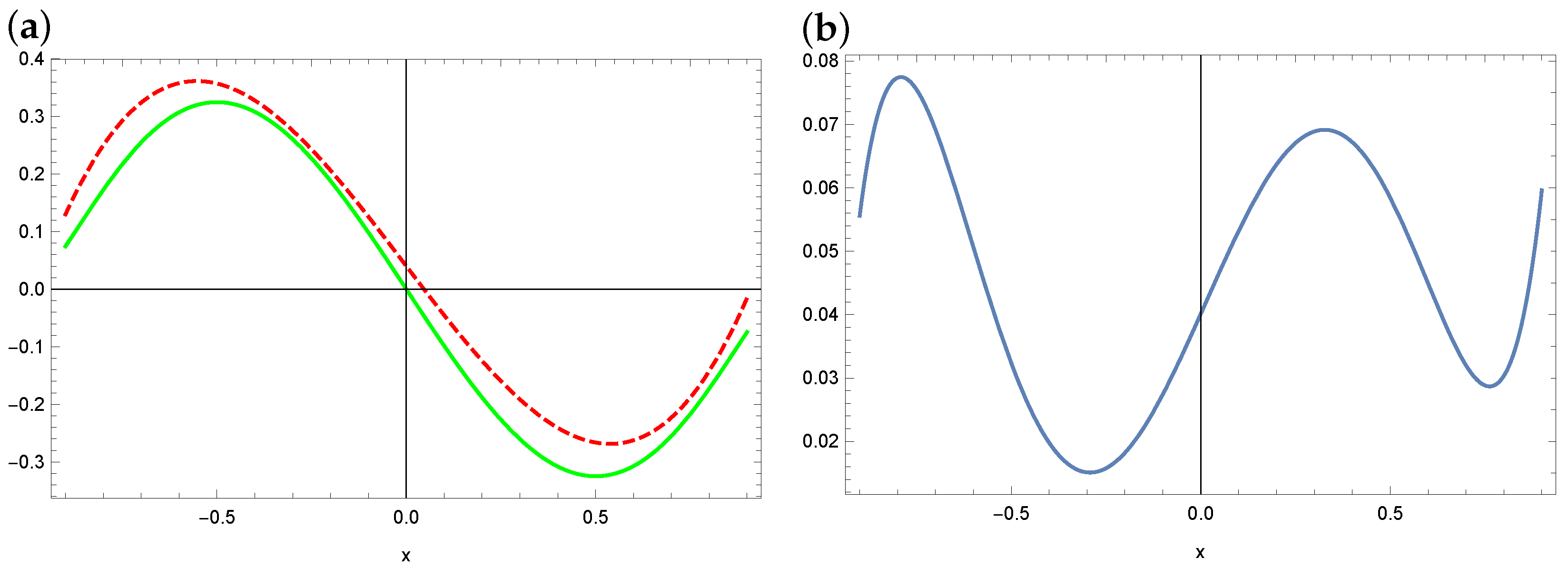
4.2. Example 2
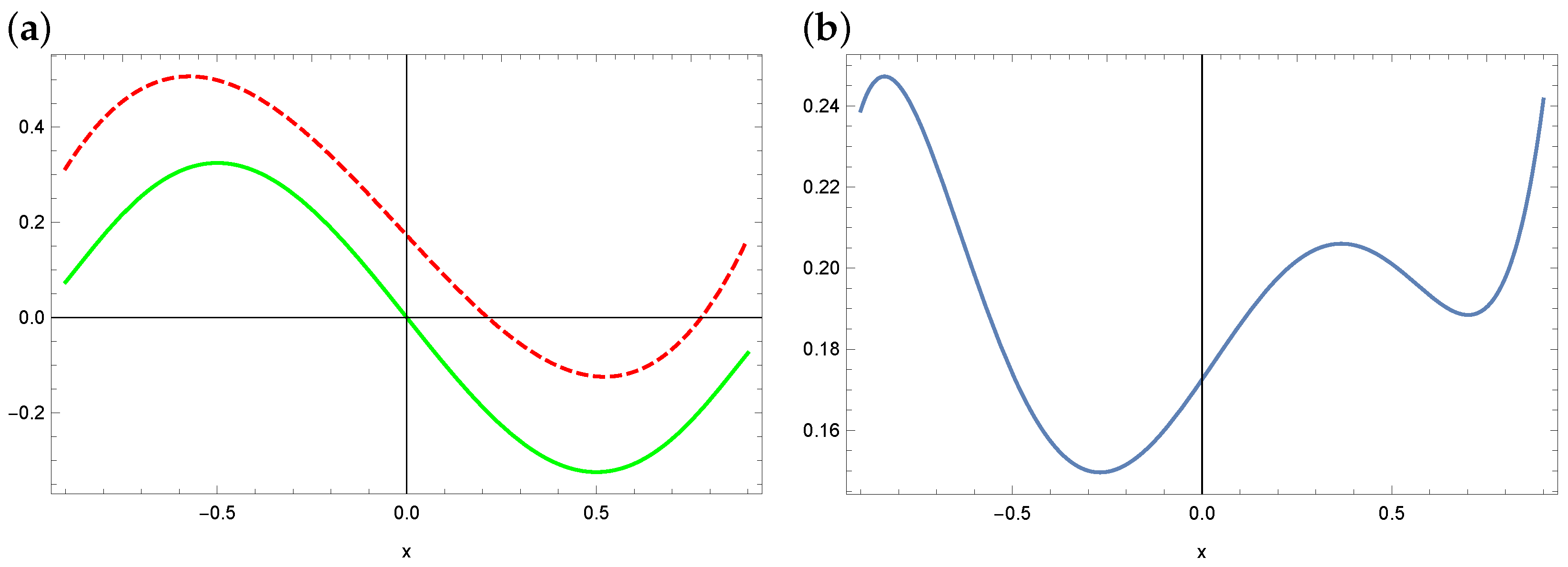
4.3. Example 3
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alexandrov, V.M.; Kovalenko, E.V. Problems with Mixed Boundary Conditions in Continuum Mechanics; Science: Moscow, Russia, 1986. [Google Scholar]
- Frankel, J. A Galerkin solution to a regularized Cauchy singular integro-differential equation. Q. Appl. Math. 1995, 53, 245–258. [Google Scholar] [CrossRef]
- Hori, M.; Nasser, N. Asymptotic solution of a class of strongly singular integral equations. SIAM J. Appl. Math. 1990, 50, 716–725. [Google Scholar] [CrossRef]
- Koya, A.C.; Erdogan, F. On the solution of integral equations with strongly singular kernels. Q. Appl. Math. 1987, 45, 105–122. [Google Scholar] [CrossRef]
- Jäntschi, L. Modelling of acids and bases revisited. Stud. UBB Chem. 2022, 67, 73–92. [Google Scholar] [CrossRef]
- Hochstadt, H. Integral Equations; Wiley Interscience: New York, NY, USA, 1973. [Google Scholar]
- Muskelishvili, N.I. Singular Integral Equations; Noordhoff: Groningen, The Netherlands, 1953. [Google Scholar]
- Tricomi, F.G. Integral Equations; Dover: New York, NY, USA, 1985. [Google Scholar]
- Atkinson, K.E. A Survey of Numerical Methods for the Solution of Fredholm Integral Equations of the Second Kind. J. Integral Equ. Appl. 1992, 4, 15–46. [Google Scholar] [CrossRef]
- Badr, A.A. Integro-differential equation with Cauchy kernel. J. Comput. Appl. Math. 2001, 134, 191–199. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Mandal, B.N. Numerical solution of a singular integro-differential equation. Appl. Math. Comput. 2008, 195, 346–350. [Google Scholar] [CrossRef]
- Delves, L.M.; Mohamed, J.L. Computational Methods for Integral Equations; Cambridge University Press: London, UK, 2008. [Google Scholar] [CrossRef]
- Linz, P. Analytical and Numerical Methods for Volterra Equations; SIAM: Philadelphia, PA, USA, 1987. [Google Scholar]
- Maleknejad, K.; Arzhang, A. Numerical solution of the Fredholm singular integro-differential equation with Cauchy kernel by using Taylor-series expansion and Galerkin method. Appl. Math. Comput. 2006, 182, 888–897. [Google Scholar] [CrossRef]
- Mennouni, A. A projection method for solving Cauchy singular integro-differential equations. Appl. Math. Lett. 2012, 25, 986–989. [Google Scholar] [CrossRef]
- Tunç, O.; Tunç, C.; Yao, J.-C.; Wen, C.-F. New Fundamental Results on the Continuous and Discrete Integro-Differential Equations. Mathematics 2022, 10, 1377. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O.; Yao, J.-C. On the Enhanced New Qualitative Results of Nonlinear Integro-Differential Equations. Symmetry 2023, 15, 109. [Google Scholar] [CrossRef]
- Pavlycheva, N.; Niyazgulyyewa, A.; Sachabutdinow, A.; Anfinogentow, V.; Morozow, O.; Agliullin, T.; Valeev, B. Hi-Accuracy Method for Spectrum Shift Determination. Fibers 2023, 11, 60. [Google Scholar] [CrossRef]
- Kukushkin, M.V. Cauchy Problem for an Abstract Evolution Equation of Fractional Order. Fractal Fract. 2023, 7, 111. [Google Scholar] [CrossRef]
- Chen, L.; Li, J.; Li, Y.; Zhao, Q. Even-Order Taylor Approximation-Based Feature Refinement and Dynamic Aggregation Model for Video Object Detection. Electronics 2023, 12, 4305. [Google Scholar] [CrossRef]
- Qiao, J.; Yang, S.; Zhao, J.; Li, H.; Fan, Y. A Quantitative Study on the Impact of China’s Dual Credit Policy on the Development of New Energy Industry Based on Taylor Expansion Description and Cross-Entropy Theory. World Electr. Veh. J. 2023, 14, 295. [Google Scholar] [CrossRef]
- La, V.N.T.; Minh, D.D.L. Bayesian Regression Quantifies Uncertainty of Binding Parameters from Isothermal Titration Calorimetry More Accurately Than Error Propagation. Int. J. Mol. Sci. 2023, 24, 15074. [Google Scholar] [CrossRef] [PubMed]
- Bayram, H.; Vijaya, K.; Murugusundaramoorthy, G.; Yalçın, S. Bi-Univalent Functions Based on Binomial Series-Type Convolution Operator Related with Telephone Numbers. Axioms 2023, 12, 951. [Google Scholar] [CrossRef]
- Haupin, R.J.; Hou, G.J.-W. A Unit-Load Approach for Reliability-Based Design Optimization of Linear Structures under Random Loads and Boundary Conditions. Designs 2023, 7, 96. [Google Scholar] [CrossRef]
- Liu, Y.; Duan, C.; Liu, L.; Cao, L. Discrete-Time Incremental Backstepping Control with Extended Kalman Filter for UAVs. Electronics 2023, 12, 3079. [Google Scholar] [CrossRef]
- Zhang, J.; Xiao, G.; Deng, G.; Zhang, Y.; Zhou, J. The Quadratic Constitutive Model Based on Partial Derivative and Taylor Series of Ti6242s Alloy and Predictability Analysis. Materials 2023, 16, 2928. [Google Scholar] [CrossRef]
- Brociek, R.; Chmielowska, A.; Słota, D. Comparison of the probabilistic ant colony optimization algorithm and some iteration method in application for solving the inverse problem on model with the caputo type fractional derivative. Entropy 2020, 22, 555. [Google Scholar] [CrossRef]
- Dai, Y.; Yu, J.; Zhang, C.; Zhan, B.; Zheng, X. A novel whale optimization algorithm of path planning strategy for mobile robots. Appl. Intell. 2023, 53, 10843–10857. [Google Scholar] [CrossRef]
- Rana, N.; Latiff, M.S.A.; Abdulhamid, S.M.; Chiroma, H. Whale optimization algorithm: A systematic review of contemporary applications, modifications and developments. Neural Comput. Appl. 2020, 32, 16245–16277. [Google Scholar] [CrossRef]
- Brociek, R.; Pleszczyński, M.; Zielonka, A.; Wajda, A.; Coco, S.; Lo Sciuto, G.; Napoli, C. Application of heuristic algorithms in the tomography problem for pre-mining anomaly detection in coal seams. Sensors 2022, 22, 7297. [Google Scholar] [CrossRef]
- Rahnema, N.; Gharehchopogh, F.S. An improved artificial bee colony algorithm based on whale optimization algorithm for data clustering. Multimed. Tools Appl. 2020, 79, 32169–32194. [Google Scholar] [CrossRef]
- Kaya, E. A New Neural Network Training Algorithm Based on Artificial Bee Colony Algorithm for Nonlinear System Identification. Mathematics 2022, 10, 3487. [Google Scholar] [CrossRef]
- Brociek, R.; Słota, D. Application of real ant colony optimization algorithm to solve space fractional heat conduction inverse problem. Commun. Comput. Inf. Sci. 2016, 639, 369–379. [Google Scholar] [CrossRef]
- Bacanin, N.; Stoean, C.; Zivkovic, M.; Jovanovic, D.; Antonijevic, M.; Mladenovic, D. Multi-Swarm Algorithm for Extreme Learning Machine Optimization. Sensors 2022, 22, 4204. [Google Scholar] [CrossRef]
- Jin, H.; Jiang, C.; Lv, S. A Hybrid Whale Optimization Algorithm for Quality of Service-Aware Manufacturing Cloud Service Composition. Symmetry 2024, 16, 46. [Google Scholar] [CrossRef]
- Tian, Y.; Yue, X.; Zhu, J. Coarse–Fine Registration of Point Cloud Based on New Improved Whale Optimization Algorithm and Iterative Closest Point Algorithm. Symmetry 2023, 15, 2128. [Google Scholar] [CrossRef]
- Li, M.; Xiong, H.; Lei, D. An Artificial Bee Colony with Adaptive Competition for the Unrelated Parallel Machine Scheduling Problem with Additional Resources and Maintenance. Symmetry 2022, 14, 1380. [Google Scholar] [CrossRef]
- Kaya, E.; Baştemur Kaya, C. A Novel Neural Network Training Algorithm for the Identification of Nonlinear Static Systems: Artificial Bee Colony Algorithm Based on Effective Scout Bee Stage. Symmetry 2021, 13, 419. [Google Scholar] [CrossRef]
- Mandal, B.N.; Bera, G.H. Approximate solution of a class of singular integral equations of second kind. J. Comput. Appl. Math. 2007, 206, 189–195. [Google Scholar] [CrossRef][Green Version]
- Akay, B.; Karaboga, D. A survey on the applications of artificial bee colony in signal, image, and video processing. Signal Image Video Process. 2015, 9, 967–990. [Google Scholar] [CrossRef]
- Pham, Q.; Mirjalili, S.; Kumar, N.; Alazab, M.; Hwang, W. Whale Optimization Algorithm with Applications to Resource Allocation in Wireless Networks. IEEE Trans. Veh. Technol. 2020, 69, 4285–4297. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Sun, G.; Shang, Y.; Zhang, R. An Efficient and Robust Improved Whale Optimization Algorithm for Large Scale Global Optimization Problems. Electronics 2022, 11, 1475. [Google Scholar] [CrossRef]
- Du, H.; Liu, P.; Cui, Q.; Ma, X.; Wang, H. PID Controller Parameter Optimized by Reformative Artificial Bee Colony Algorithm. J. Math. 2022, 2022, 3826702. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WOA | ||||||
| ABC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brociek, R.; Pleszczyński, M. Comparison of Selected Numerical Methods for Solving Integro-Differential Equations with the Cauchy Kernel. Symmetry 2024, 16, 233. https://doi.org/10.3390/sym16020233
Brociek R, Pleszczyński M. Comparison of Selected Numerical Methods for Solving Integro-Differential Equations with the Cauchy Kernel. Symmetry. 2024; 16(2):233. https://doi.org/10.3390/sym16020233
Chicago/Turabian StyleBrociek, Rafał, and Mariusz Pleszczyński. 2024. "Comparison of Selected Numerical Methods for Solving Integro-Differential Equations with the Cauchy Kernel" Symmetry 16, no. 2: 233. https://doi.org/10.3390/sym16020233
APA StyleBrociek, R., & Pleszczyński, M. (2024). Comparison of Selected Numerical Methods for Solving Integro-Differential Equations with the Cauchy Kernel. Symmetry, 16(2), 233. https://doi.org/10.3390/sym16020233