
Phase Portraits and Abundant Soliton Solutions of a Hirota Equation with Higher-Order Dispersion

 , , and
, , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Generalized Exponential Differential Rational Function Method
- [Step 1.] Given a nonlinear partial differential equation (NLPDE) for , we assume it to be in the form
3. The Generalized Bernoulli Sub-ODE Method
- [Step 2.] Assume that Equation (3) has a solution of formwhere are unknown coefficients. The balancing rule gives the value of M. Here, satisfies the following equation:
- [Step 4.] We can build wave solutions of the NLPDE by utilizing the solutions of Equation (7) and the values of constants acquired in Step 3.
4. Application
4.1. Applying GERFM
- [Case 1:] For and , it gives
4.2. Applying GBSOM
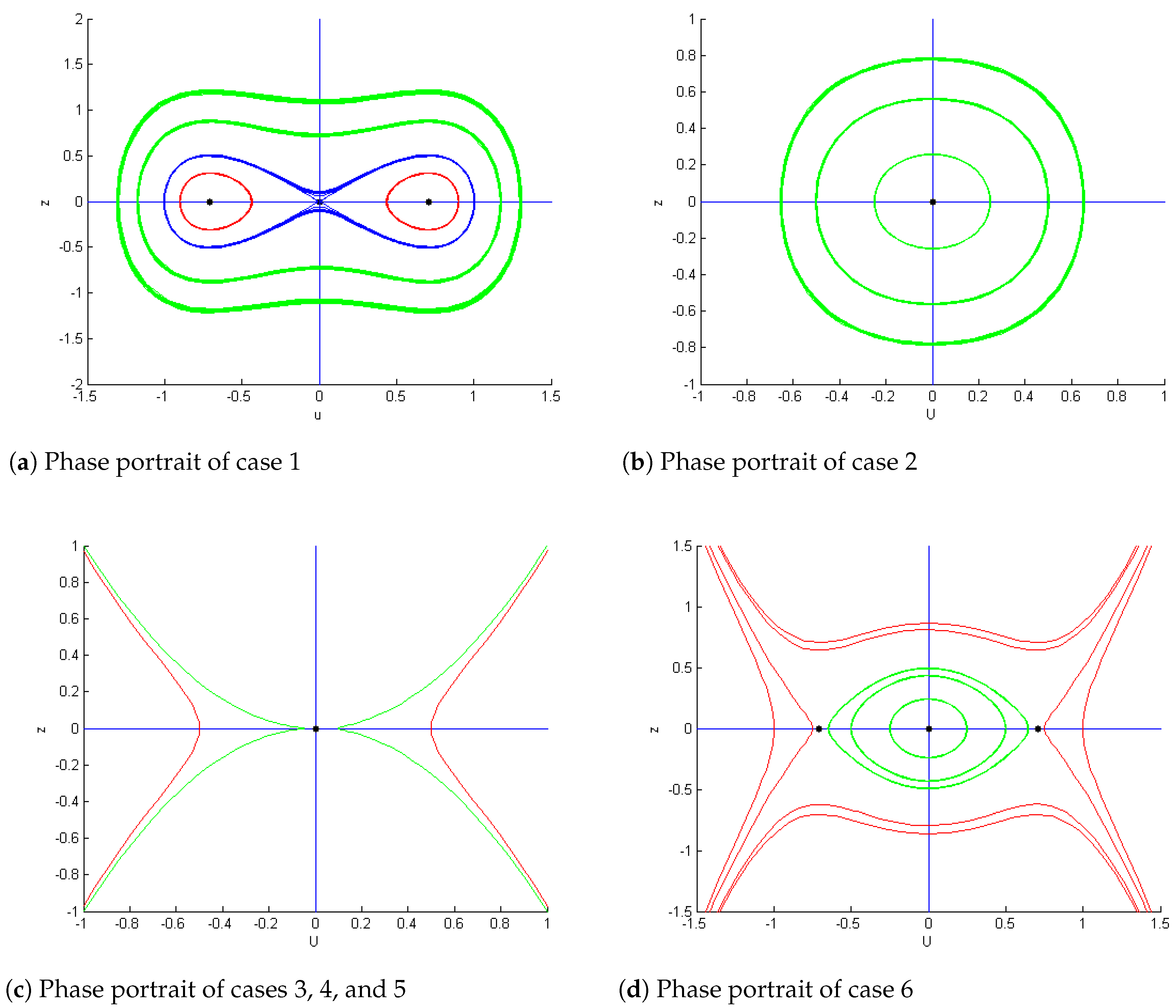
5. Bifurcation Behaviors and Phase Portrait
5.1. Planer Dynamical System
5.2. Equilibrium Points
- Case I:
- Case II:
- Case III:
- Case IV:
- Case V:
- Case VI:
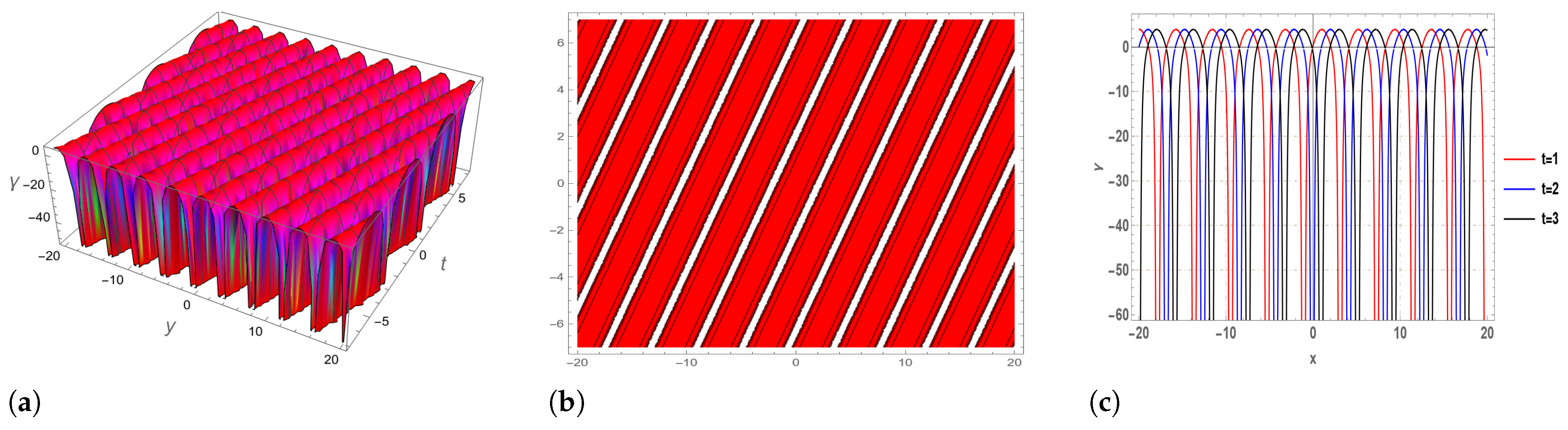
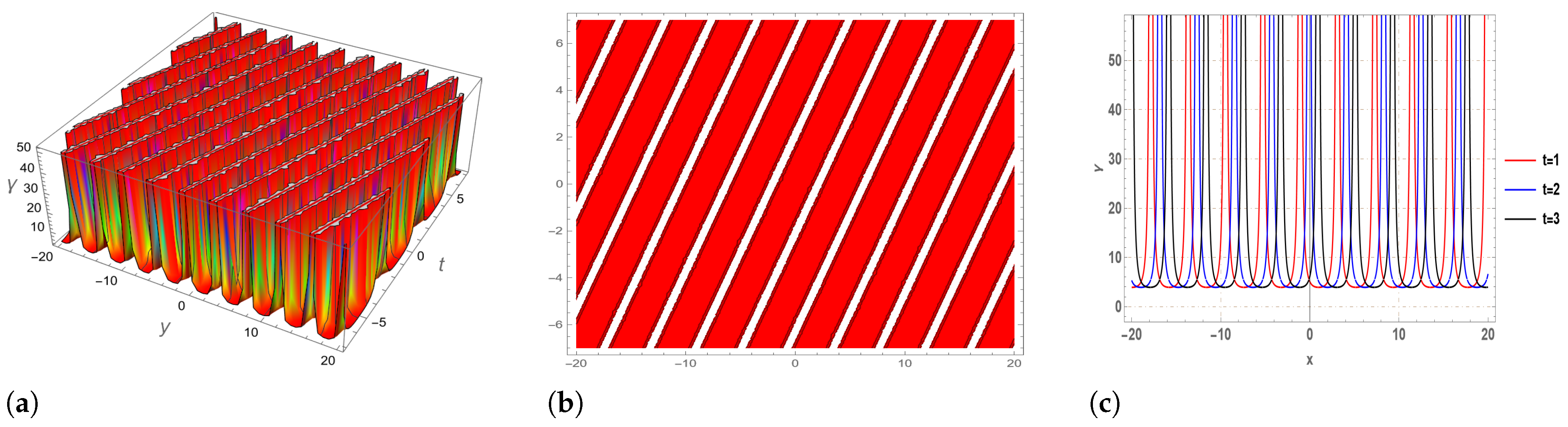
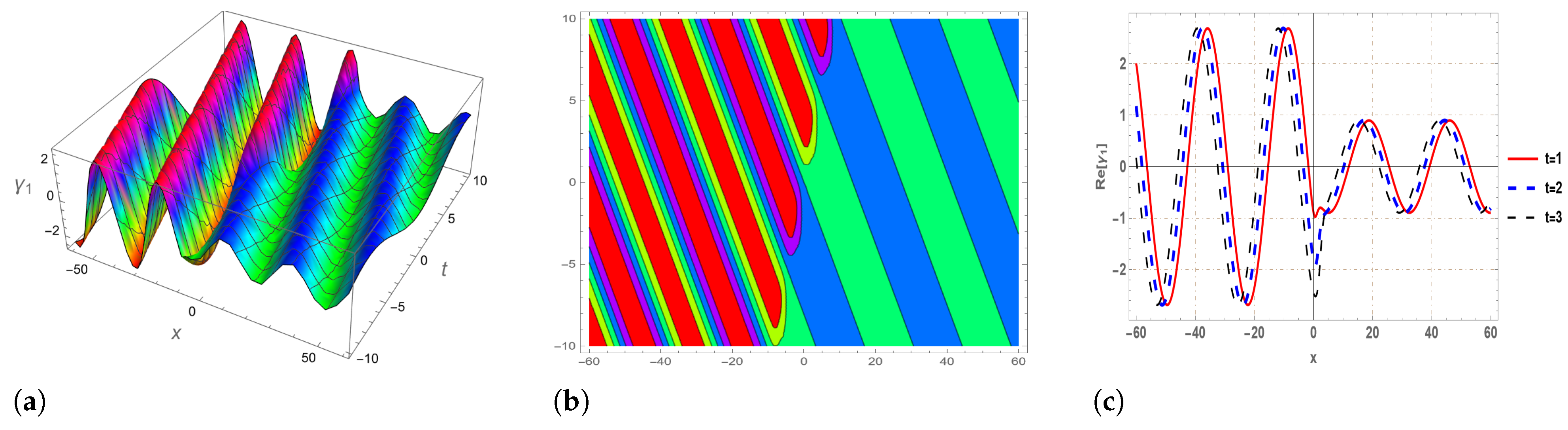
6. Graphical Representation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mollenauer, L.F.; Gordon, J.P. Solitons in Optical Fibers: Fundamentals and Applications; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Kumar, S.; Ma, W.X.; Dhiman, S.K.; Chauhan, A. Lie group analysis with the optimal system, generalized invariant solutions, and an enormous variety of different wave profiles for the higher-dimensional modified dispersive water wave system of equations. Eur. Phys. J. Plus 2023, 138, 434. [Google Scholar] [CrossRef]
- Butt, A.R.; Raza, N.; Inc, M.; Alqahtani, R.T. Complexitons, Bilinear forms and Bilinear Bäcklund transformation of a (2 + 1)-dimensional Boiti–Leon–Manna–Pempinelli model describing incompressible fluid. Chaos Solitons Fractals 2023, 168, 113201. [Google Scholar] [CrossRef]
- Hong, B. Assorted exact explicit solutions for the generalized Atangana’s fractional BBM–Burgers equation with the dissipative term. Front. Phys. 2022, 10, 1071200. [Google Scholar] [CrossRef]
- Arnous, A.H.; Seadawy, A.R.; Alqahtani, R.T.; Biswas, A. Optical solitons with complex Ginzburg–Landau equation by modified simple equation method. Optik 2017, 144, 475–480. [Google Scholar] [CrossRef]
- Jawad, A.J.; Petković, M.D.; Biswas, A. Modified simple equation method for nonlinear evolution equations. Appl. Math. Comput. 2010, 217, 869–877. [Google Scholar]
- Kuo, R.J.; Setiawan, M.R.; Nguyen, T.P. Sequential clustering and classification using deep learning technique and multi-objective sine-cosine algorithm. Comput. Ind. Eng. 2022, 173, 108695. [Google Scholar] [CrossRef]
- Albalawi, W.; Raza, N.; Arshed, S.; Farman, M.; Nisar, K.S.; Abdel-Aty, A.H. Chaotic behavior and construction of a variety of wave structures related to a new form of generalized q-Deformed sinh-Gordon model using couple of integration norms. AIMS Math. 2024, 9, 9536–9555. [Google Scholar] [CrossRef]
- Sulaiman, T.A.; Yusuf, A.; Atangana, A. New lump, lump-kink, breather waves and other interaction solutions to the (3+ 1)-dimensional soliton equation. Commun. Theor. Phys. 2020, 72, 085004. [Google Scholar] [CrossRef]
- Yusuf, A.; Sulaiman, T.A.; Inc, M.; Bayram, M. Breather wave, lump-periodic solutions and some other interaction phenomena to the Caudrey–Dodd–Gibbon equation. Eur. Phys. J. Plus 2020, 135, 1–8. [Google Scholar] [CrossRef]
- Murad, M.A.; Iqbal, M.; Arnous, A.H.; Biswas, A.; Yildirim, Y.; Alshomrani, A.S. Optical dromions with fractional temporal evolution by enhanced modified tanh expansion approach. J. Opt. 2024, 1–10. [Google Scholar] [CrossRef]
- Sivasundaram, S.; Kumar, A.; Singh, R.K. On the complex properties to the first equation of the KadomtsevPetviashvili hierarchy. Int. J. Math. Comput. Eng. 2024, 2, 71–84. [Google Scholar] [CrossRef]
- Raza, N.; Jhangeer, A.; Arshad, S.; Butt, A.R.; Chu, Y. Dynamical analysis and phase portraits of two-mode waves in different media. Chaos 2020, 19, 103650. [Google Scholar] [CrossRef]
- Saha, A. Bifurcation, periodic and chaotic motions of the modified equal width-Burgers (MEW-Burgers) equation with external periodic perturbation. Nonlinear Dyn. 2017, 87, 2193–2201. [Google Scholar] [CrossRef]
- Elmandouha, A.A.; Ibrahim, A.G. Bifurcation and travelling wave solutions for a (2+1)-dimensional KdV equation. J. King Saud Univ.-Sci. 2020, 14, 139–147. [Google Scholar] [CrossRef]
- Salam, M.A.; Mondal, M.; Ali, M.S.; Dey, P. The analysis of exact solitons solutions in monomode optical fibers to the generalized nonlinear Schrödinger system by the compatible techniques. Int. J. Math. Comput. Eng. 2023, 1, 149–170. [Google Scholar]
- Hirota, R. Exact envelope-soliton solutions of a nonlinear wave equation. J. Math. Phys. 1973, 14, 805–809. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Bulut, H.; Sulaiman, T.A.; Baskonus, H.M.; Akturk, T. On the bright and singular optical solitons to the (2+1)- dimensional NLS and the Hirota models. Opt. Quant. Electron. 2018, 50, 134. [Google Scholar] [CrossRef]
- Eslami, M.; Mirzazadeh, M.A.; Neirameh, A. New exact wave solutions for Hirota model. Pramana-J. Phys. 2015, 84, 3–8. [Google Scholar] [CrossRef]
- Shu, J.J. Exact n-envelope-soliton solutions of the Hirota model. Opt. Appl. 2003, 33, 539–546. [Google Scholar]
- Li, L.; Wu, Z.; Wang, L.; He, J. High-order rogue waves for the Hirota equation. Ann. Phys. 2013, 334, 198–211. [Google Scholar] [CrossRef]
- Wang, P.; Tian, B.; Liu, W.J.; Li, M.; Sun, K. Soliton solutions for a generalized inhomogeneous variable-coefficient Hirota model with symbolic computation. Stud. Appl. Math. 2010, 125, 213–222. [Google Scholar]
- Demontisa, F.; Ortenzib, G.; van der Mee, C. Exact solutions of the Hirota model and vortex filaments motion. Phys. D 2015, 313, 61–80. [Google Scholar] [CrossRef]
- Dhiman, S.K.; Kumar, S. Analyzing specific waves and various dynamics of multi-peakons in (3 + 1)-dimensional p-type equation using a newly created methodology. Nonlinear Dyn. 2024, 112, 10277–10290. [Google Scholar] [CrossRef]
- Yang, X.F.; Deng, Z.C.; Wei, Y. A Riccati-Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Differ. Equ. 2015, 117. [Google Scholar] [CrossRef]
- Salam, M.A.; Mondal, M.; Ali, M.S.; Dey, P. Traveling Wave Solutions of Regularized Long-Wave Equation. J. Comput. Math. Sci. 2015, 6, 171–178. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, F.; Raza, N.; Chahlaoui, Y.; Butt, A.R.; Baskonus, H.M. Phase Portraits and Abundant Soliton Solutions of a Hirota Equation with Higher-Order Dispersion. Symmetry 2024, 16, 1554. https://doi.org/10.3390/sym16111554
Wu F, Raza N, Chahlaoui Y, Butt AR, Baskonus HM. Phase Portraits and Abundant Soliton Solutions of a Hirota Equation with Higher-Order Dispersion. Symmetry. 2024; 16(11):1554. https://doi.org/10.3390/sym16111554
Chicago/Turabian StyleWu, Fengxia, Nauman Raza, Younes Chahlaoui, Asma Rashid Butt, and Haci Mehmet Baskonus. 2024. "Phase Portraits and Abundant Soliton Solutions of a Hirota Equation with Higher-Order Dispersion" Symmetry 16, no. 11: 1554. https://doi.org/10.3390/sym16111554
APA StyleWu, F., Raza, N., Chahlaoui, Y., Butt, A. R., & Baskonus, H. M. (2024). Phase Portraits and Abundant Soliton Solutions of a Hirota Equation with Higher-Order Dispersion. Symmetry, 16(11), 1554. https://doi.org/10.3390/sym16111554