1. Introduction
Define
as a class of analytic functions
h of the form
where
:
.
Let
, and
be the subclasses of
, which are composed of univalent functions, starlike functions and convex functions, respectively ([
1,
2]).
Let
denote the class of analytic functions
p with a positive real part on
of the following form:
The function is called the Carathéodory function.
Suppose that the functions
F and
G are analytic in
. The function
F is said to be subordinate to the function
G if there exists a function
satisfying
and
, such that
. Note that
. In particular, if
G is univalent in
, the following conclusion follows (see [
1]):
In 1994, Ma and Minda [
3] introduced the classes
and
of starlike functions and convex functions by using the subordination. The function
if and only if
and the function
if and only if
, where
and
.
Let
and
. The classes
and
, which are the classes of Janowski starlike and convex functions, respectively (refer to [
4]).
and
are known for the classes of starlike and convex function, respectively.
In 1959, Sakaguchi [
5] introduced the class
of starlike functions with respect to symmetric points. The function
if and only if
In 1987, El Ashwah and Thomas [
6] introduced the classes
and
of starlike functions with respect to conjugate points and symmetric conjugate points as follows:
Similarly to the previous section, the classes and can be further generalized to the classes and .
The function belongs to if and only if holds true and belongs to if and only if holds true, where and .
If the function meets the following criteria: , then h is said to be in the class of the reciprocal starlike functions of order , which is represented by .
In contrast to the classical starlike function class
of order
, the reciprocal starlike function class of order
maps the unit disk to a starlike region within a disk with
as the center and
as the radius ([
7]). In particular, the disk is large when
. Therefore, the study of the class of reciprocal starlike functions has aroused the research interest of most scholars [
8,
9,
10,
11,
12,
13,
14,
15]. In 2012, Sun et al. [
8] extended the reciprocal starlike function to the class of meromorphic univalent function.
For the analytic functions
and
, let
be a class of harmonic mappings, which has the following form (see [
16,
17]):
where
Specifically, h is referred to as the analytical part, and g is known as the co-analytic part of f.
It is known that the function
is locally univalent and sense-preserving in
if and only if
(see [
18]).
Based on these results, it is possible to obtain the geometric properties of the co-analytic part by means of the analytic part of the harmonic function.
In the past few years, different subclasses of have been studied by several authors as follows.
In 2007, Klimek and Michalski [
19] investigated the subclass
with
.
In 2014, Hotta and Michalski [
20] investigated the subclass
with
.
In 2015, Zhu and Huang [
21] investigated the subclasses of
with
and
.
Combined with the above studies, by using the subordination relationship, this paper further constructs the reciprocal structure harmonic function class with symmetric conjugate points as follows.
Definition 1. Let be in the class and have the form (3) and . We define the class as that of univalent harmonic reciprocal starlike functions with a symmetric conjugate point, the function if and only if , that is, In addition, let define the class of harmonic univalent reciprocal convex functions with a symmetric conjugate point. The function if and only if , that is, In this paper, we will discuss the harmonic Bloch constant and the norm of the pre-Schwarzian derivative for the classes.
For
, the harmonic Bloch constant of
f is
where
is the hyperbolic distance between
z and
w, and
. If
, then
f is called the Bloch harmonic function. By (6), Colonna [
22] proved that
Recently, many authors have studied the Bloch constant of harmonic functions (see [
23,
24]).
Let
f be the analytic and locally univalent function in
, and the pre-Schwarzian derivative of
f is
and the norm of
is defined as
Unlike the case of analytic functions, the pre-Schwarzian derivative of harmonic functions allows a variety of different definitions (see [
25,
26,
27]).
In [
27], Chuaqui–Duren–Osgood gives the following definition of the pre-Schwarzian derivative the harmonic function
:
where
. In fact, it is easy to see that the above definition is consistent with the classical pre-Schwarzian derivative of an analytic function.
In 2022, Xiong et al. [
24] rewrite the pre-Schwarzian derivative as follows:
and the norm of the pre-Schwarzian derivative of the harmonic function
f can be defined in terms of (9).
In this paper, we will give an inequality of f belonging to the class with respect to its pre-Schwarzian derivative. In particular, the bounds of the norm of the pre-Schwarzian derivative of f in the class is also determined.
2. Preliminary Preparation
To obtain our results, we need the following Lemmas.
According to the subordination relationship, we obtain the distortion theorem of the classes and .
Lemma 1. Let and .
(1) If , thenand (2) If , thenandwhere Proof. (i) For
, let
After a simple calculation, we can obtain
Substituting
, we obtain
Letting
and
, we obtain
It is easy to find that
is decreasing with respect to
. Therefore,
that is,
Integrating the two sides of the inequality for
t above from 0 to 1, we obtain
and
By combining the inequalities (21)–(23), we can obtain (11) of Lemma 1.
On the other hand, for
, we can obtain
From (11) and (24), we can obtain (12) of Lemma 1.
(ii) If
, then
. According to the results in (11), we can easily obtain (14), that is,
Integrating the two sides of the inequality from 0 to r, we can obtain (13). Therefore, we complete the proof of Lemma 1. □
Lemma 2. If , then .
Lemma 3. If , then .
Lemma 4. Let and .
(i) If , then (ii) If , thenwhere and are given by (15),(16),(17) and (18), respectively. Proof. (i) Suppose that
; then, we obtain
According to Lemma 1 and Lemma 2, we have
Inequality (25) can be obtained by combining (27) and (28).
(ii) Suppose that
; then, we obtain
According to Lemma 1 and Lemma 3, we have
By (29) and (30), we can obtain
By integrating the two sides of inequality (31) about r, we can obtain (26) after a simple calculation. □
Lemma 5 ([
28])
. (Avkhadiev-Wirths) Suppose that and , where w is the Mobius self-mapping of andthen the following conclusion can be drawn:(i) and .
(ii) .
(iii) .
3. Main Results
First, we will find the Bloch constants for the class .
Theorem 1. Let and . If the function , then the Bloch constant of f is bounded, andwhere and are, respectively, the only two roots in interval of the following equations:and Proof. Suppose that
, then the analytic part
. According to Lemma 4 and Lemma 5, we have
To obtain the bounds of
in (32), we define the following functions:
and
A simple calculation shows that the derivatives of the functions
and
are
and
respectively, where
and
From (33),
is a continuous function of
r in the interval
satisfying
and
where
Now, we consider the monotonicity of the function
. Since
Due to the condition
, we have
, that is,
In summary, it can be seen that is always true, that is, is a monotonically decreasing function with respect to r. By the zero point theorem, there exists a unique such that , known by the properties of the function, is the maximum point of the function .
Similarly to the previous proof,
is a continuous function of
r in the interval
. According to (34), the following conclusions can be drawn:
and
If , then is always true, that is, the function is a monotonically decreasing function with respect to r. By the zero point theorem, there exists a unique such that , known by the properties of the function, then is the maximum point of the function . □
In particular, let in Theorem 1, we can obtain the following result.
Corollary 1. Let . If , then the Bloch constant of f is bounded, andwhere is the only root of the equationin the interval . In particular, let in Theorem 1, we can obtain the following result.
Corollary 2. Let and . If , then the Bloch constant of f is bounded, andwhere is the only root of equationin the interval . Next, we will find the Bloch constants for the class .
Theorem 2. Let and . If , then the Bloch constant of f is bounded, andwhere and are the only roots of equationsandin the interval , respectively. Proof. Suppose that
, then the analytic part
. According to Lemma 4 and Lemma 5, we have
To obtain the bounds of
in the above inequality, we define the following functions:
and
After a simple calculation, the derivatives of the functions
and
are, respectively,
and
where
and
By (35),
in
is a continuous function with respect to
r satisfying
Next, we consider the monotonicity of the function
.
According to the condition
, it is obvious that
. So we can obtain
If we take
as a function of
and write it as
, then
Since
, we obtain
, which gives us
. So, we obtain
Similarly to the above estimate, we can obtain , , , . By the monotonicity of and the zero point theorem, there exists , which satisfies the following conclusion.
When , is true, .
When , is true, .
The results obtained from the above analysis are as follows.
By condition , formula is always true, that is, the function is monotonically decreasing with respect to r.
Similarly to the proof of Theorem 1, from the zero point theorem, there exists a unique such that , and according to the properties of the function, then is the maximum point of the function .
As in the previous similar proof,
in
is a continuous function about
r. By (36), we obtain
and
Since , we find that is always true, that is, the function is monotonically decreasing with respect to r. By the zero point theorem, there exists a unique such that , according to the properties of the function, then is the maximum point of the function . □
In Theorem 2, let and , respectively, and the following corollaries can be obtained:
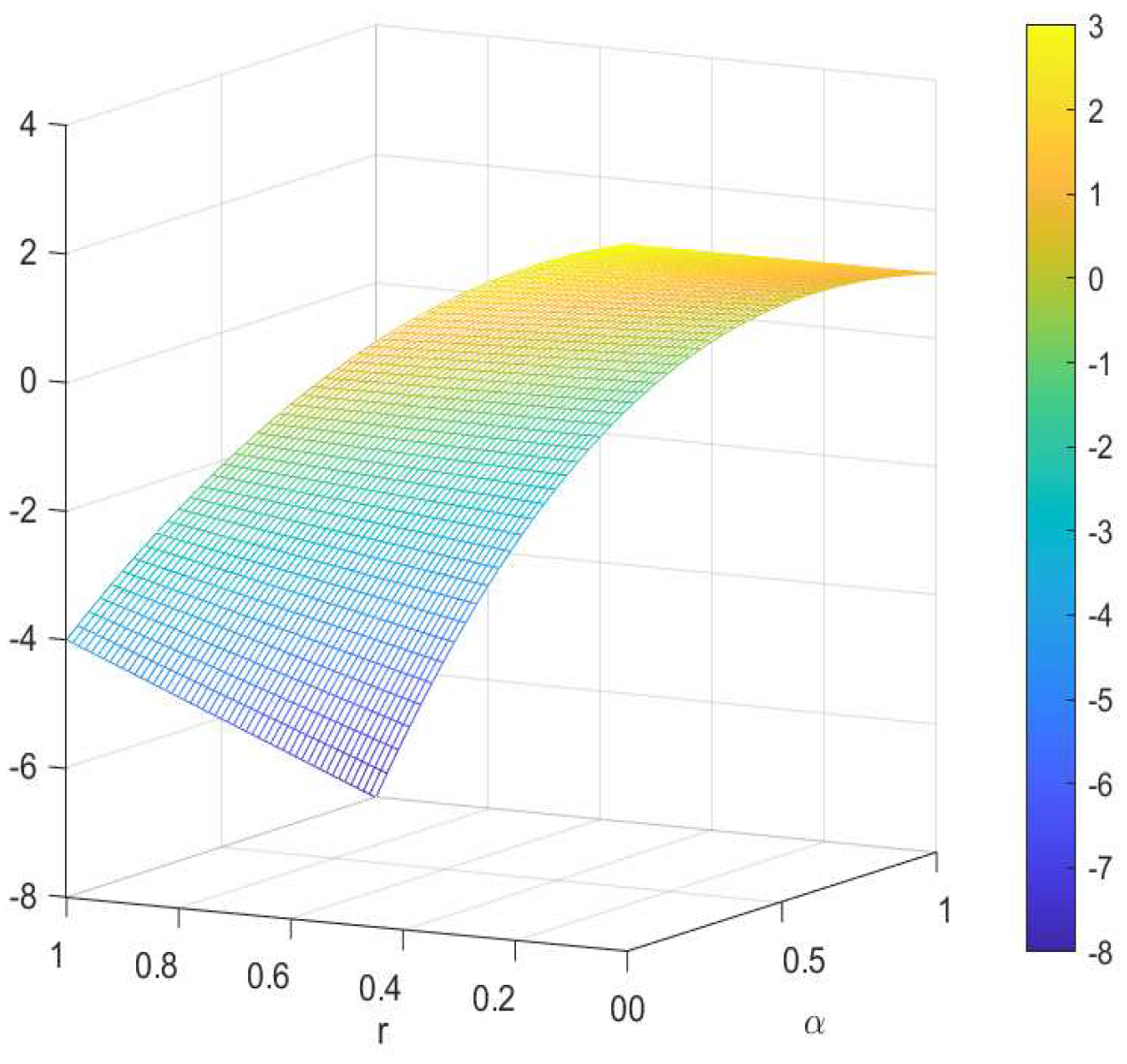
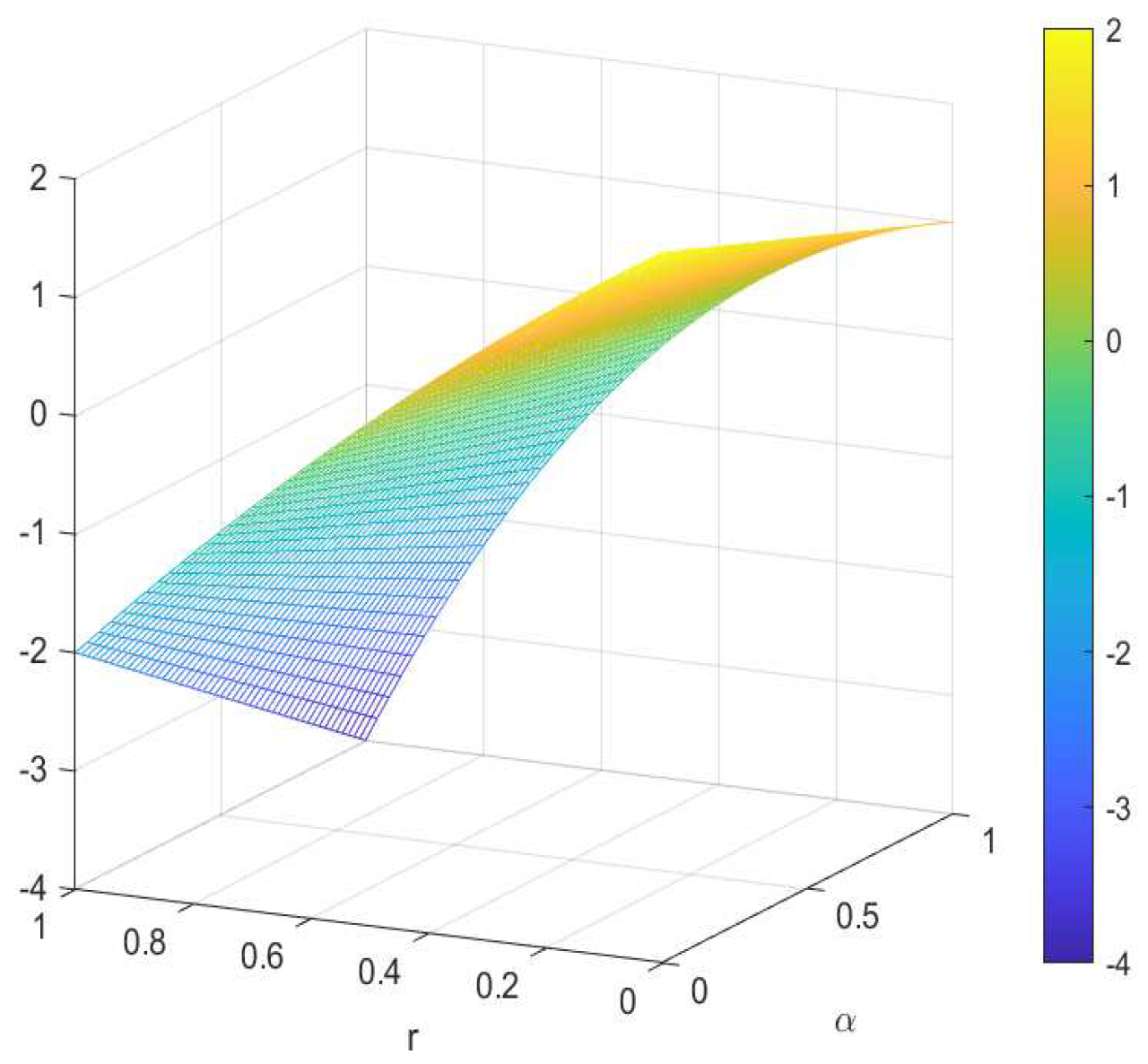
Corollary 3. Let and . If the function , then the Bloch constant of f is bounded andwhere is the only root of equationin the interval , and the image of functionis shown in Figure 1. In the figure, the function is represented by the three-dimensional coordinate system plus color; the axis represents the variable α; the axis represents the variable r; the axis and color represents the function . Corollary 4. Let and . If the function , then the Bloch constant of f is bounded andwhere is the only root of the equationin the interval , and the image of functionis shown in Figure 2. In the figure, the function is represented by the three-dimensional coordinate system plus color; the axis represents the variable α; the axis represents the variable r; the axis and color represents the function . Next, we obtain the norm of the pre-Schwarzian derivative for the classes .
Theorem 3. Let and . If , then the norm of the pre-Schwarzian derivative of f is bounded andwhere is the only root of the equationin the interval . In particular, let . The norm of the pre-Schwarzian derivative of f is bounded andwhere is the only root of the equation Proof. Suppose that
, then
. Applying Lemma 4, we have
We can obtain from Lemma 5 and the inequality (39) that
and
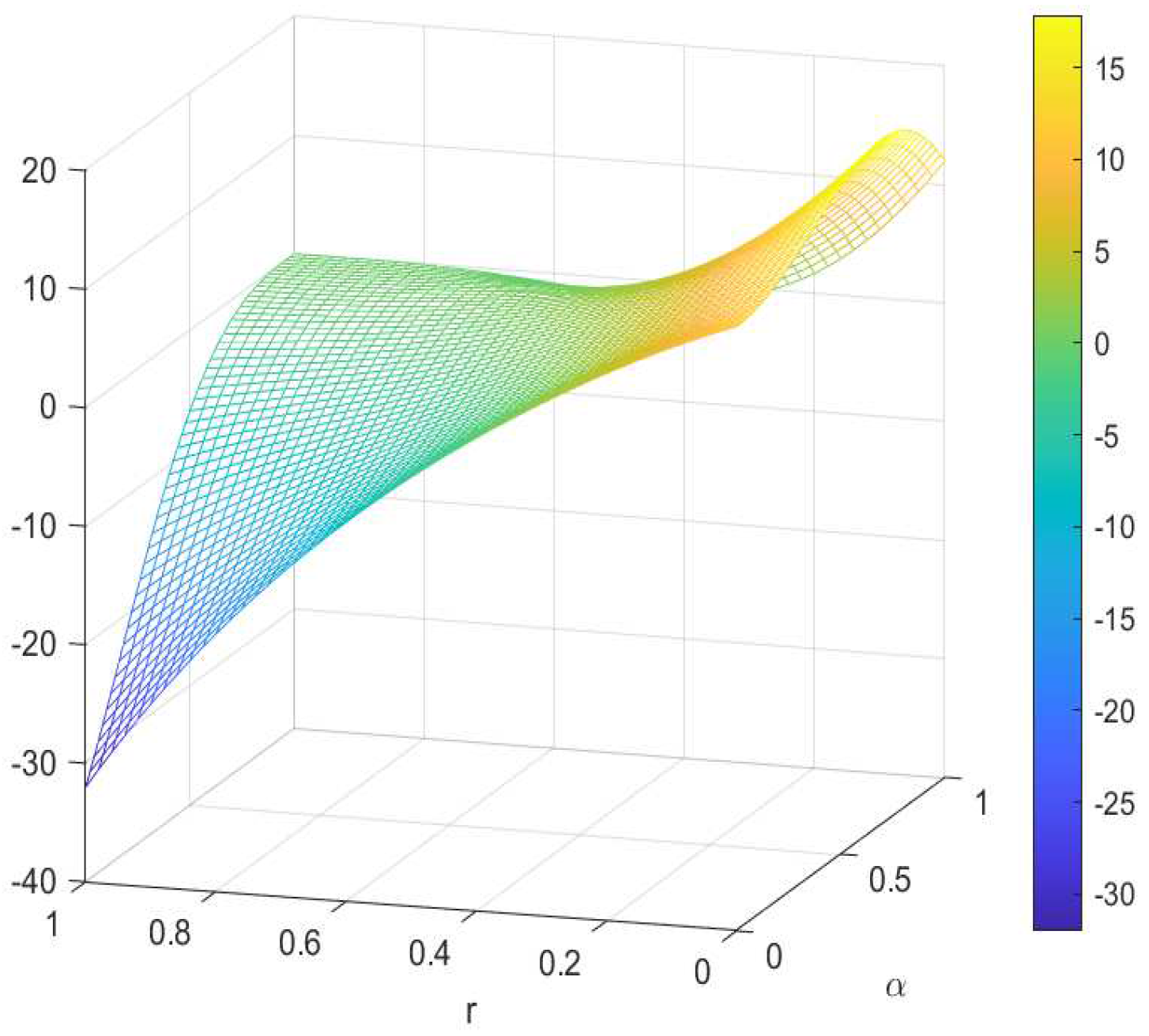
It can be seen from (41) that
is true if and only if
is true, where
The image of
is shown
Figure 3 because
is continuous in the interval
and satisfies the condition
Therefore, there is at least a root , such that .
In particular, let
. From (40), we have
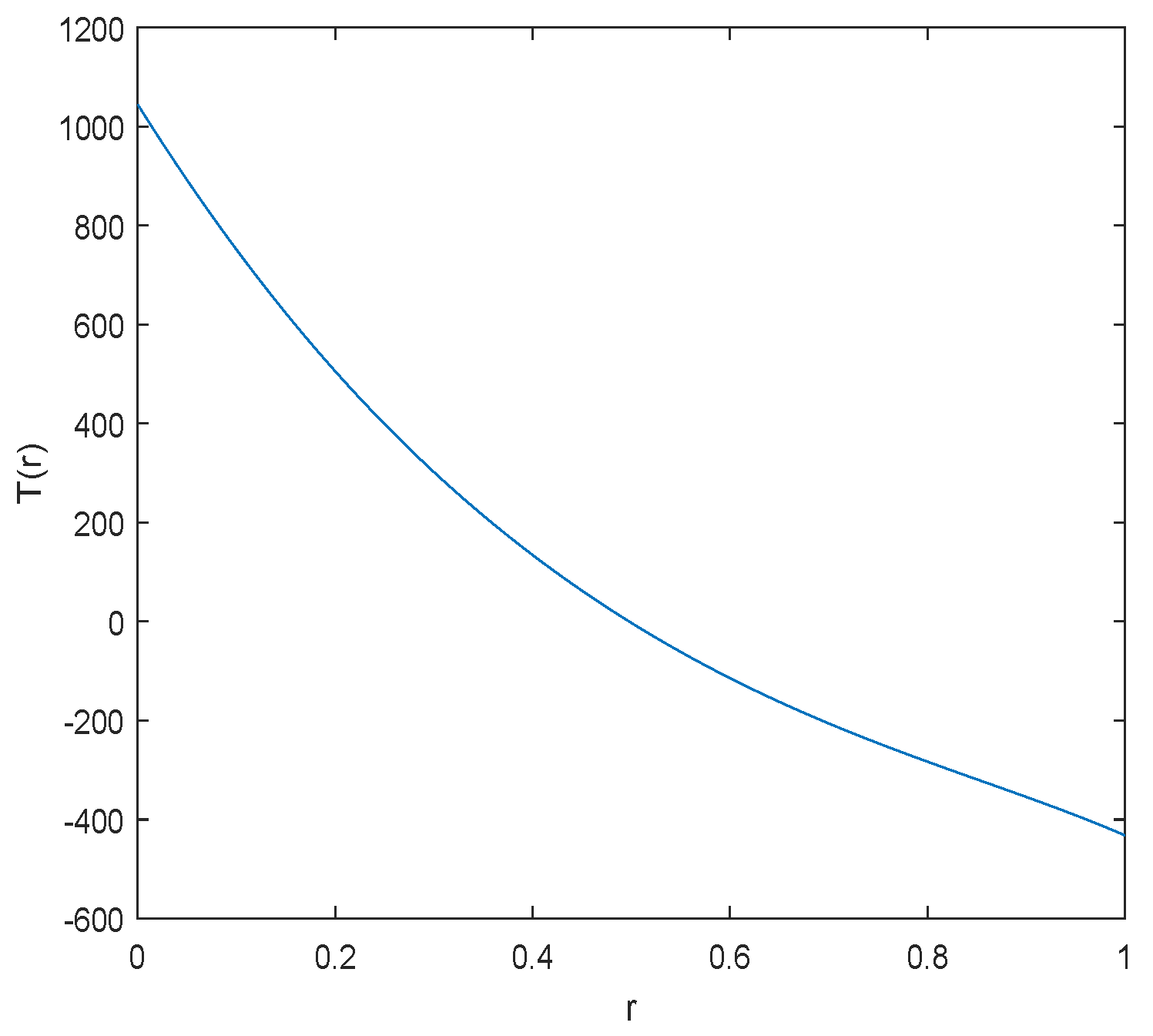
It can be seen from (43) that
is true if and only if
is true, where
The image of
is shown
Figure 4 because
is continuous in the interval
and satisfies the condition
As a result, there is only one , which makes . According to the geometric properties of the function , takes the maximum value at . □


{kind=link}
{kind=link}
{kind=link}
{kind=link}



