1. Introduction
One common technique for designing curves and surfaces is the subdivision scheme. They give an exact and effective way to describe curves and surfaces that are smooth and nice as the limit of a sequence of consecutive refinements. It is an algorithmic technique through which, after successive iterations, a smooth curve or surface is obtained as the data is applied to a dense union of points. Subdivision schemes can be categorized into two types: symmetric and nonsymmetric schemes. The rules used in symmetric schemes are both shift and flip invariant. Symmetric schemes are frequently used in the literature as a standard technique for smoothing out coarse polygons or shapes. Their magnificence lies in their exquisite mathematical formulation and simple implementation.
Dyn et al. [
1] proposed refinement rules by evaluating cubic polynomials based on local cubic interpolation. Ko et al. [
2] proposed a more efficient ternary approximating 4-point subdivision scheme deduced from interpolating the cubic polynomial. In addition, they generalized ternary
-point subdivision schemes. Hussain et al. [
3] established a generalised family of 5-point schemes with different arity and shape determining parameter. Rehan and Siddiqi [
4] presented a class of ternary subdivision schemes having a complexity of 3 that generate
curves. They also suggested that the limiting curves of
can be generated from a 4-point approximating ternary subdivision scheme. The approximating subdivision schemes having arbitrary complexity with a single parameter were presented by Mustafa et al. [
5] and [
6]. They showed that their schemes are better in contrast with the various existing subdivision schemes. Dual de Rham-type subdivision schemes were developed by Conti and Romani [
7]. These are smoother, with a modest increase in the support width. Zhang et al. [
8] presented Hermite subdivision schemes of any arity. They estimated their smoothness as well. Wang and Ma [
9] presented an extended, tuned subdivision strategy for quadrilateral meshes.
Nawaz et al. [
10] discussed various properties of a 7-point approximating quaternary subdivision scheme. Zouaoui et al. [
11] examined the design and analysis of certain novel
n-point families for ternary subdivision schemes. Iqbal et al. [
12] discussed the influence of a geometric characteristic on curve sketching using the tension parameter. Amat et al. [
13] suggested that the 4-point ternary non-linear non-interpolatory subdivision scheme may eliminate the Gibbs phenomenon. Later, Zhou et al. [
14] developed a sufficient condition to test the hypothesis that p-ary subdivision schemes exhibit the Gibbs phenomenon in the limit function at the discontinuous point. Yan et al. [
15] assembled a collection of surface and curve subdivision schemes.
Artifacts are caused by differences between mathematical modeling and the practical imaging process. All users should be aware of their existence and be prepared to deal with them in the event they occur. This phenomenon [
16] can disrupt the diagnostic process for CBCT data sets. Digital artifacts are irregularities that digital signal processing introduces into digital signals. Artifacts are inaccurate representations of tissue structures created in EEG, ultrasound, X-ray, CT scan, and magnetic resonance imaging in medical imaging (MRI). The shadow effect [
17] may result in measurement noise or artifact in the raw data because of the way the laser scanner is made. The PPG signal from pulse oximeters frequently becomes saturated and clipped due to artifacts [
18]. Cone-beam computed tomography (CBCT) scans suffer from poor picture quality due to artifacts, which may make it more difficult to diagnose certain illnesses [
19]. As a result, determining the size of the artifact is required.
In CAGD, modifying the shape of curves and surfaces by choosing a suitable value for shape parameters is an extremely popular topic for discussion. To increase the flexibility of the curve, it is extremely necessary to adjust the shape parameter’s value. We can adjust the shape of the curve for practical applications more conveniently by assigning different values to a parameter. The prior research utilizing shape parameters to deal with the curve shape design problem was proposed by Barsky [
20]. Costantini [
21] studied how to build variable-degree polynomials, which have the same structure and features as cubics but have more flexibility over their shape. Farouki et al. [
22] investigated the preservation property of PH splines. The parametric curve maintains the form of planar data by modifying tension parameters. An addition of cubic uniform B-spline curves with most characteristics identical to the corresponding cubic uniform B-spline curves without parameters was proposed by Xu and Wang [
23]. Han and Yang [
24] depicted a piecewise curve with locally modifiable shape parameters. Cao and Wang [
25] presented a correlation between the B-spline basis functions and the uniform B-spline basis functions having a parameter. As an extension of the characteristics of shape-preserving function curves, ref. [
26] redefined parametric curves and investigated the impact of polynomial functions on flying trajectories.
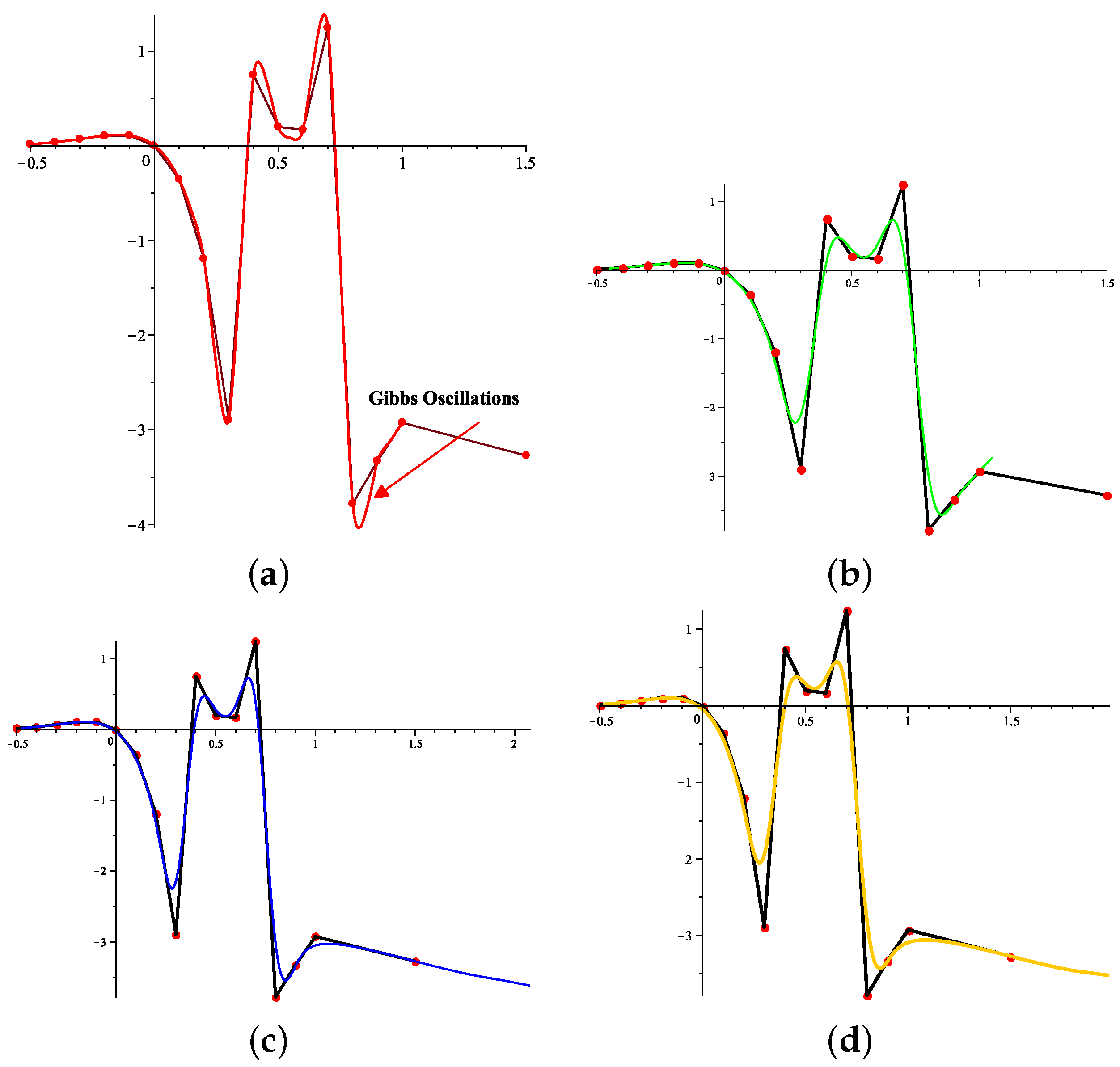
Linear symmetric subdivision schemes can produce Gibbs oscillations [
14] when the initial data is derived from discontinuous functions. Additionally, these schemes may generate unwanted artifacts in the geometric shapes, which do not exist in the original polygon or sketch but appear in the limit curve produced by the schemes. To address these issues, one solution is to use non-linear symmetric schemes, but this approach increases the computational complexity of the method. To address this challenge, we propose an alternative approach that involves modifying the linear symmetric schemes by introducing shape parameters into the linear rules. By choosing the values of these parameters, we can overcome these issues while still using linear symmetric schemes. Our approach provides a balance between reducing artifacts and maintaining computational efficiency.
This work belongs to the field of computational geometry and finds applications in the graphical modelling of curves and surfaces. Additionally, it contributes to the development of shape-preserving models used in engineering and industry. It also offers applications in digital signal processing.
This paper is arranged as follows: Basic definitions and essential prerequisite formulas are provided in
Section 2.
Section 3,
Section 4 and
Section 5 develop a general parametric family of
n-ary linear symmetric subdivision schemes by combining B-spline and Lagrange’s basis functions. Some properties of the members of proposed classes are discussed in
Section 6. In
Section 7, some features of the piecewise polynomial curve are discussed. In
Section 8, some applications, examples, and comparisons with existing schemes are discussed to show the efficiency of the proposed schemes. The conclusion is given in
Section 9.
2. Preliminaries and Notations
We review some fundamentally relevant definitions and known concepts about subdivision schemes in this section because they form the foundation of the rest of this paper.
If
=
and
=
are two
k-th and
-th level polygons, followed by the
n-ary linear symmetric subdivision scheme, which generates
from
presented by [
27] is:
where
n indicates the arity of the subdivision scheme and the sequence
of a finite number of coefficients determines the mask of the subdivision scheme. The subdivision scheme (
1) satisfies the following necessary condition
For the mask
, the z-transform is given below to examine the subdivision scheme’s features.
Equation (
2) is usually known as the Laurent polynomial or symbol of the scheme.
A B-spline curve [
28] is defined as a linear combination of control points
and B-spline blending function
.
where
, are control points. The B-spline blending functions are defined recursively for
as
and for
, we can write the blending functions as
where
k is the curve’s order and
is the non-decreasing sequence of uniform knots.
The Lagrange polynomials
for Lagrange basis
corresponding to the nodes
is defined by
When
, an even-degree polynomial is obtained, and when
, an odd-degree polynomial is obtained. From the derivation of the polynomial interpolation property, the mask can be obtained. The initial data
,
, is interpolated by a polynomial, and then at
, for
and
, the data is evaluated. Since up to a fixed degree the space of polynomials are shift invariant and the scheme is stationary and uniform, we only deal with the case for both
k and
(for details, see [
1]).
3. Construction of Binary Odd-Point Symmetric Scheme
This section is devoted to deriving a general formula for obtaining the class of 3-point binary approximating stationary subdivision schemes having a parameter. At the
-th level, we consider subdivision schemes that generate the refined data
for any
.
where
is a finite set and weights
, for
,
, and
. If all sets
have the same cardinality
r then the subdivision scheme is known as the
r-point scheme.
For a 3-point scheme with
, weights
=
and
=
, the new data values
and
are the linear combination of data values
Here we see that the weights
=
and
=
, are both shift and flip invariant, so the scheme is called symmetric. Alternatively, the rules
and
are both shift and flip invariant, so the scheme is symmetric. Here we find the condition for choosing a suitable weight such that the 3-point subdivision scheme generates a
limit function. Because the weights in the rules are independent of the subdivision level
k, we use
. Let us consider a piecewise quadratic B-spline that can be represented as
where,
,
are the basis functions. The basis functions of a quadratic B-spline at the uniform knots
are
Replacing
with
, we can write (
6) in matrix notation as
where
We can write the Lagrange basis function of a quadratic polynomial in matrix notation at the node points
and sample the data
at
.
where
We get the displacement vector
by taking the difference between (
8) and (
7).
Now to obtain the newly inserted vertices, the following equation is established:
This implies
The above polynomial can be expressed as
where
Now evaluate the polynomial (
10) at
,
and
to obtain the points at
-th subdivision level of 3-point binary scheme.
It is also presented in Algorithm 1.
| Algorithm 1: The subdivision levels of the 3-point binary subdivision scheme with shape parameter |
← ← : : : for ℏ∈ do for ∈ do ← ← end for for do for ∈ do ← ← end for end for for ∈ do ← end for end for
|
Similarly, we can obtain a 5-point binary symmetric subdivision scheme by considering the quartic Lagrange and B-spline polynomials.
In this paper, the order of the continuity of the schemes are computed by using the Algorithm 1 of [
29]. The effect of the parameter
on the order of continuity of the scheme (
11) is shown in
Table 1.
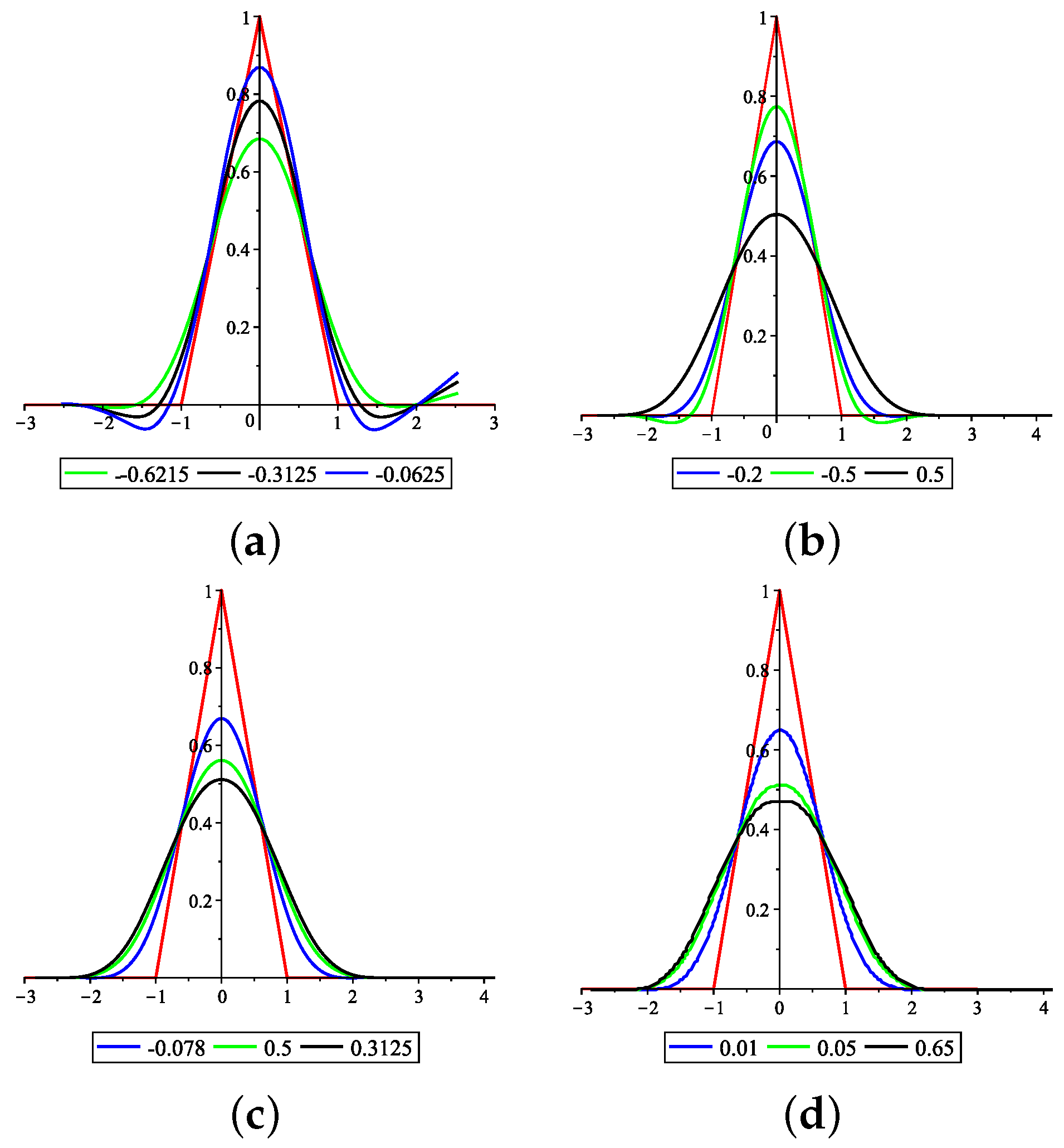
Remark 1. Considering the value of , from continuity interval, the proposed scheme (11) is converted to a -continuous 3-point B-spline scheme and for , we get uniform B-spline of degree 4. 8. Comparison and Application
To demonstrate the performance of our proposed schemes, we present some examples and comparisons of our proposed schemes with existing schemes in this section.
Table 1 shows the continuity of the proposed 3-point binary scheme (
11). In
Table 2 and
Table 3, we summarize the order of continuity of the proposed 4-point and 6-point
n-ary approximating schemes respectively. In
Table 7,
Table 8,
Table 9 and
Table 10, we present the comparison of the 3-point binary (
11), 4-point binary (
18), 4-point ternary (
19) and 4-point quaternary (
20) proposed schemes with the existing schemes. It has been shown that many existing schemes in the literature are particular cases of our proposed schemes. The polynomial interpolation property is illustrated in Example 1.
Figure 5, illustrates the interpolation property generated by the 4-point (
18), (
19) and (
20) subdivision schemes after four subdivision levels. The proposed schemes preserve the initial shapes of the control polygons. A comparison of Gibbs phenomena is graphically illustrated in Example 2 and
Figure 6.
Tensor product subdivision schemes are powerful tools for generating smooth surfaces. One of the key advantages of tensor product subdivision schemes is their ability to generate regular surfaces. These surfaces are useful in a wide range of applications, including computer-aided geometric design and animation. The 4-point tensor product quaternary scheme is a specific type of tensor product subdivision scheme. The
Figure 7 and
Figure 8 show regular surfaces generated by the 4-point tensor product quaternary scheme using different parametric values. From these figures, we conclude that the proposed schemes can generate regular surfaces from their initial control structures.
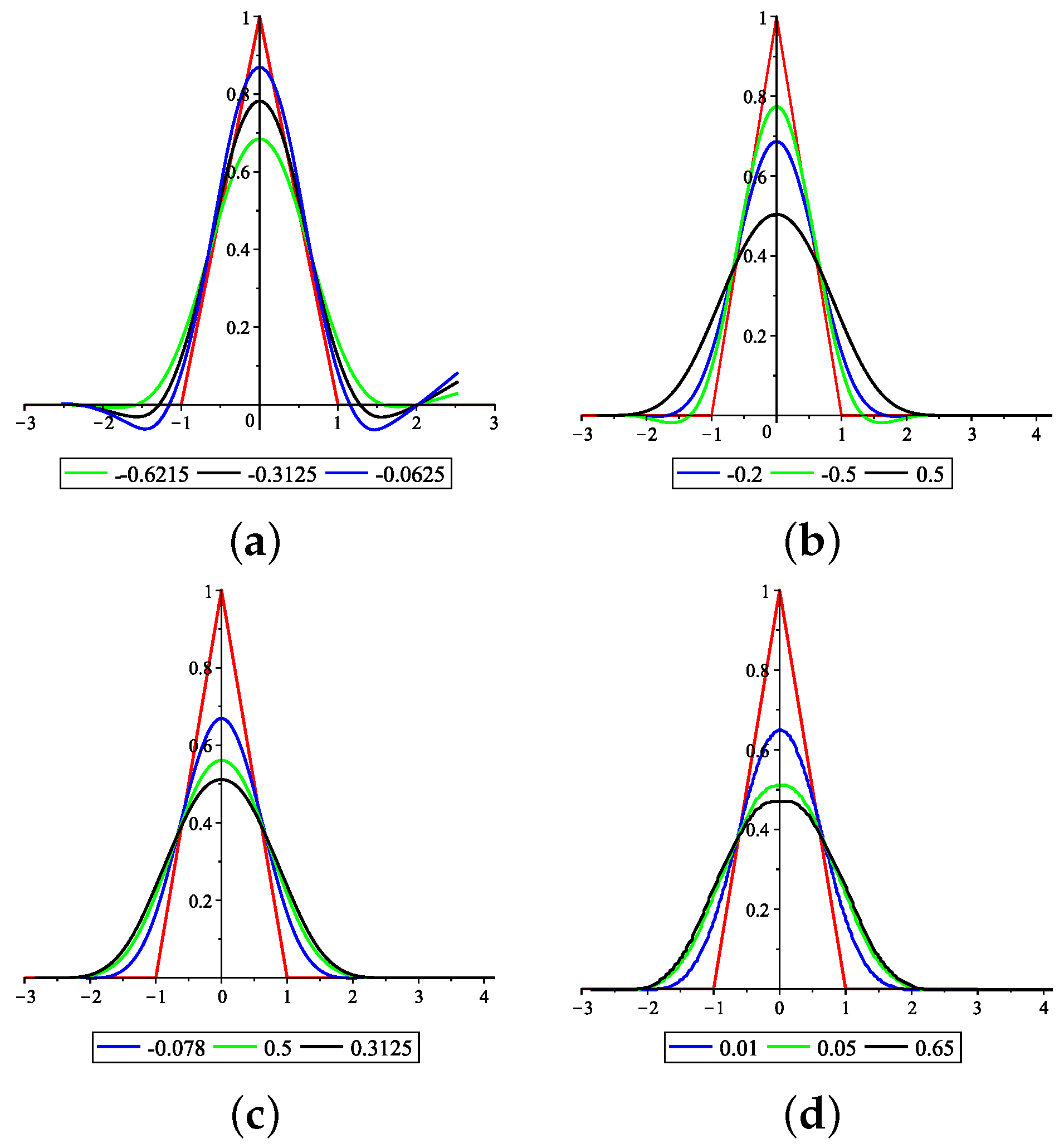
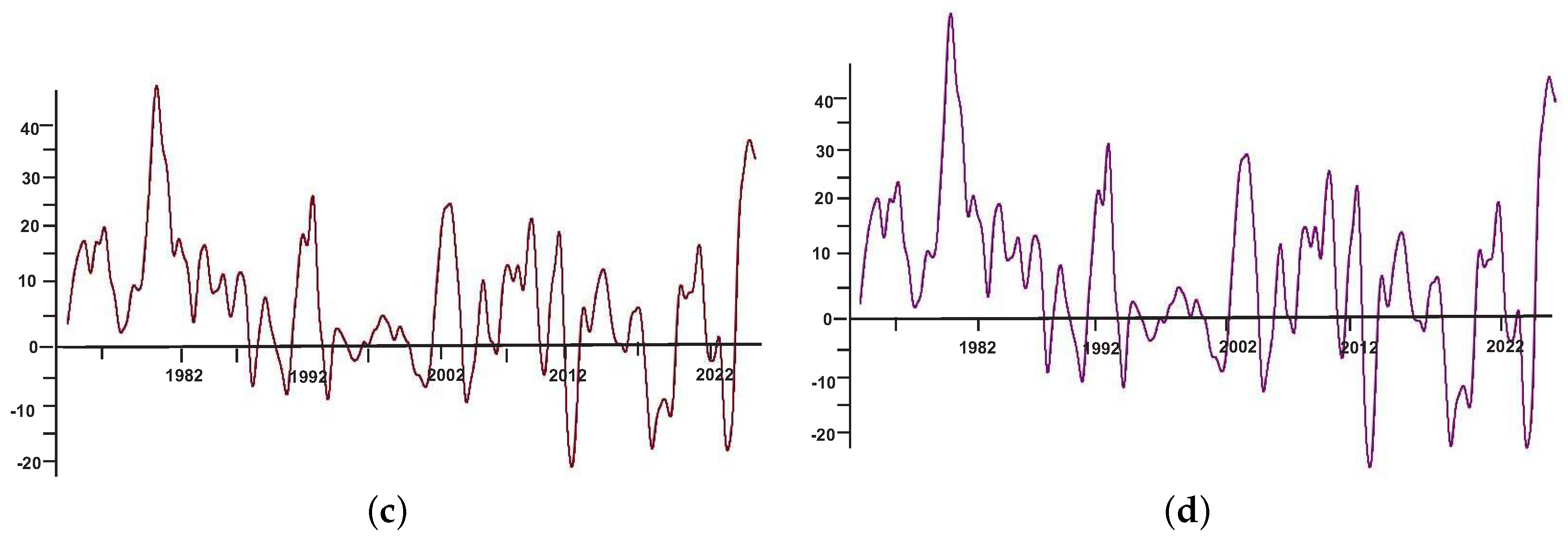
Example 1. We use real data from the Australian Bureau of Statistics (www.abs.gov.au) (CPI) data set for our numerical experiment. Yearly and quarterly fluctuations in the price of automotive fuel from the years 1973 to 2022 are displayed against annual movement in the graph. Example 2. In this numerical experiment, we perform a comparison between our proposed subdivision scheme and the existing linear subdivision scheme [1] by taking the following discontinuous function.The original function is plotted in a solid black line. Red circles show the initial control points. Here we see that the Gibbs effects and unwanted high oscillations due to the presence of a jump discontinuity are reduced with our proposed subdivision scheme. Example 3. In this numerical experiment, we present some geometric shapes generated by some members of the family of schemes. Here RL stands for refinement/subdivision level.

 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}