1. Introduction and Statement of the Main Results
The centers of the polynomial differential systems of the form
with
and
homogeneous polynomials of degree
n have been studied for
, and 5. Furthermore, for
, see refs. [
1,
2,
3,
4,
5,
6], for
, see refs. [
7,
8], for
, see ref. [
9], and for
, see ref. [
10]. While the centers of systems (
1) of degrees 2 and 3 have been completely classified, this is not the case for the centers of degrees 4 and 5. Moreover, for systems (
1) having a center of degrees 2 and 3, their phase portraits in the Poincaré disc have been classified in refs. [
5,
6] and in [
11], respectively.
In a similar way to the study completed for the centers of systems (
1), in this paper we classify the phase portraits in the Poincaré disc of the homogeneous Hamiltonian systems of degrees 1, 2, 3, 4, and 5, i.e., of the systems
where
is a homogeneous polyonomial of degree
n for
. We recall that the phase portraits of the quadratic Hamiltonian systems in the Poincaré disc were classified in [
12].
Roughly speaking, the Poincaré disc is the closed disc centered at the origin of coordinates of
of radius one. where the interior of this disc has been identified with
and its boundary, the circle
, with the infinity of
. Note that in the plane, we can go to infinity in as many directions as points have the circle
. Any polynomial differential system can be extended analytically to the Poincaré disc, and in this way we can study its dynamics in a neighborhood of infinity. For more details on the Poincaré disc, see Chapter 5 of [
13] or
Section 2.2.
In the following theorem, we provide the phase portraits in the Poincaré disc of all the homogeneous Hamiltonian differential systems of degree 1, 2, 3, 4 and 5.
Theorem 1. The phase portraits in the Poincaré disc of the homogeneous Hamiltonian systems with finitely many equilibria of degree n are given in Figure n, for .
We note that the phase portraits in the Poincaré disc of other classes of Hamiltonian systems have also been studied by other authors; see, for instance, refs. [
14,
15].
2. Preliminaries and Basic Results
In this section, we present some basic results and notations that are necessary for proving our results.
2.1. Poincaré Compactification
In this subsection, we recall notations and results that we shall use for studying the orbits near infinity of a planar polynomial differential system.
Let be a polynomial vector field of degree n, and we consider its analytic extension to .
For studying the extended vector field on the sphere we consider six local charts, namely , for , with the local diffeomorphisms and given by for and . We use the notation for the value of or for all k, thus means different things according with the local chart that we are considering.
In the local chart
the expression of the differential system associated to the vector field
is
While the expression of of the differential system associated with the vector field
in the local chart
is
Finally, the expression of the differential system associated to the vector field
in the local chart
is
The singular or equilibrium points on the circle of infinity of the Poincaré disc are called the infinite singular points. Of course, the singular points in the interior of the Poincaré disc are called the finite singular points.
We recall that for studying the singular points at infinity, we only need to study the infinite singular points in the chart
and the origin of the chart
; for more details, see Chapter 5 of ref. [
13].
2.2. Phase Portraits on the Poincaré disc
In this subsection, we are going to see how to characterize the phase portraits in the Poincaré disc of all the homogeneous Hamiltonian systems of degrees 1, 2, 3, 4, and 5.
The separatrix of are all the orbits of the circle at infinity, the singular or equilibrium points, the limit cycles, and the orbits that lie in the boundary of a hyperbolic sectors, i.e., the two separatrices of a hyperbolic sector.
Neumann in [
16] shows that the set of all separatrices
of the vector field
, is closed.
The canonical regions of are the open connected components of . The set formed by the union of plus one orbit chosen from each canonical region is called a separatrix configuration of . When there is an orientation preserving or reversing homeomorphism that maps the trajectories of into the trajectories of we say that the two separatrices configurations and are topologically equivalent.
The next result is mainly due to Markus [
17], Neumann [
16], and Peixoto [
18].
Theorem 2. The phase portraits in the Poincaré disc of two compactified polynomial differential systems and with finitely many separatrices are topologically equivalent if and only if their separatrix configurations and are topologically equivalent.
2.3. Homogeneous Polynomial Hamiltonian Systems
It is well known that the flow of the Hamiltonian systems in the plane preserves the area (see, for instance, ref. [
19]). Furthermore, it is known that the local phase portrait of any equilibrium point of an analytic planar differential system is either a focus, a center, or a finite union of hyperbolic, parabolic, and elliptic sectors (see, for instance, ref. [
13]). Therefore, any equilibrium point of a planar polynomial Hamiltonian system is either a center or a finite union of hyperbolic sectors.
In order to do the phase portrait in the Poincaré disc of a planar homogeneous polynomial Hamiltonian system, first we must determine the real linear factors of the Hamiltonian of the system. These linear factors provide invariant straight lines through the origin of coordinates; the endpoints of these straight lines are the infinite singular points of the homogeneous polynomial Hamiltonian systems. Moreover, these straight lines separate the Poincaré disc into sectors, with a vertex at the origin of coordinates, and in each one of these sectors we have a hyperbolic sector. If the homogeneous Hamiltonian has no real linear factors, then the origin of coordinates is a center.
3. Proof of Theorem 1 for
Without loss of generality, we assume that all the homogeneous Hamiltonian systems that we consider have their infinite singularities in the local chart ; if this is not the case, do a rotation.
We consider the linear homogeneous Hamiltonian system
where
a,
b,
c and
d are real parameters. This system has the Hamiltonian function
We know that the singular points at infinity for any polynomial differential system
Occur at the points
on the equator of the Poincaré sphere satisfying
, see Chapter 5 of [
13]. In particular for the homogeneous Hamiltonian system (
2) of degree 1 they occur at
Furthermore, to study the infinite equilibrium points of such a differential system, we have to compute the real linear factors of the homogeneous Hamiltonian polynomial , which has three different kinds of linear factors summarized in the following cases.
In the proof of Theorem 1 for all the degrees, we shall assume that the values , , , with , , and
This completes the proof of Theorem 1 for .
4. Proof of Theorem 1 for
In this section, we are interested in studying the quadratic homogeneous Hamiltonian systems with finitely many equilibria that can be written as
with
a,
b,
c and
d real parameters. Its corresponding Hamiltonian function is
The infinite singularities of this system are determined by the real linear factors of , which can have four different kinds of linear factors. Where we shall see that in the next cases I and II the system has a finitely many equilibria, while in the last cases III and IV it has infinitely many equilibria and we do not study them.
If
has three simple real linear factors
with
, so
. In this case system (
5) becomes
which has one finite singularity at the origin of coordinates. In the chart
system (
6) writes
This system has three hyperbolic nodes at
,
and
with alternative kind of stability because their corresponding eigenvalues are
and
,
and
, and
and
respectively. Then the phase portrait is given in
Figure 2a.
If
has one simple real linear factor
and two complex linear factors
, so
, and system (
5) becomes
which has one singular point at the origin of coordinates that we can determine its local phase portrait by determining the local phase portrait of the infinite singularities. In the chart
system (
7) written as
The only singularity of this system is
which is a node with eigenvalues
, and
. So its phase portrait is given in
Figure 2b.
If
has one double real linear factor
and one simple real linear factor
with
, then
, and system (
5) can be written as
In this case the system has infinitely many singularities on the straight line .
If
has one triple real linear factor
, so
. In this case system (
5) can be written as
As in the previous case this system has the straight line filled with equilibrium points, so we ignore it.
This completes the proof of Theorem 1 for .
Figure 2.
Symmetric phase portraits with respect to the origin of coordinates of the homogeneous Hamiltonian systems of degree 2.
Figure 2.
Symmetric phase portraits with respect to the origin of coordinates of the homogeneous Hamiltonian systems of degree 2.
5. Proof of Theorem 1 for
In this section we are interested in studying the cubic homogeneous Hamiltonian systems with finitely many equilibria given by
where
a,
b,
c,
d and
e are real parameters. Its corresponding Hamiltonian function is
The infinite singularities of this system are the real linear factors of , which can have nine different kinds of linear factors.
If
has four simple real linear factors
with
, so
. In this case system (
8) becomes
this system has one finite singularity at the origin of coordinates. In the chart
system (
9) written as
This system has four hyperbolic nodes
,
,
and
with eigenvalues
and
,
and
,
and
, and
and
, respectively, and these singularities have alternate kind of stability. The phase portrait is given of
Figure 3a.
If
has two simple real linear factors
with
and two complex linear factors
, so
, and system (
8) takes the form
This system has one finite singularity at the origin of coordinates. In the chart
system (
10) writes
It is easy to show that this system has two nodes with alternate kind of stability at
and
with eigenvalues
and
, and
and
, respectively. See its phase portrait in
Figure 3b.
If
has four complex linear factors
, so
In this case system (
8) becomes
This system has one finite singularity at the origin of coordinates. In the chart
system (
11) has no singularities. Thus the phase portrait is given in
Figure 3c.
If
has two double complex linear factors
, so
, and its corresponding Hamiltonian system also has the phase portrait given in
Figure 3c.
In the following cases V, VI, VII, VIII, and IX we will see that system (
8) has infinitely many singularities, which are not the subject of our work.
If has two double real linear factors , so the Hamiltonian has two straight lines and filled of singularities.
If has one double real linear factor and two simple linear factors , then the Hamiltonian system has the line filled of singularities.
If has one triple real linear factor and one simple real factor , then the Hamiltonian system has infinitely many singularities at
If has one real linear factor of multiplicity four , then the Hamiltonian system has the straight line filled up with singularities.
If has one double linear factor and two complex linear factors , then the Hamiltonian system has a straight line of singularities
This completes the proof of Theorem 1 for .
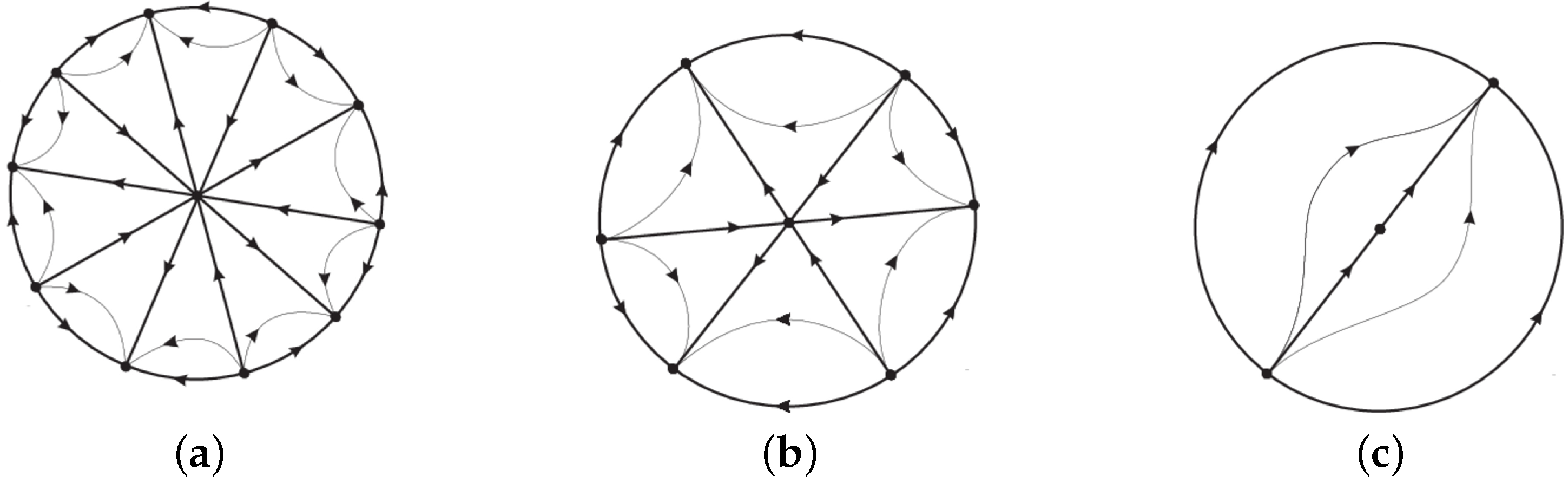
6. Proof of Theorem 1 for
In this section, we are interested in studying the quartic homogeneous Hamiltonian systems with finitely many equilibria given by
where
a,
b,
c,
d,
e and
f are real parameters. Its corresponding Hamiltonian function is
The infinite singularities of this system (
12) are determined by the real linear factors of
that can have twelve different kinds of linear factors. We shall see that only the three cases I, II, III, and IV of system (
12) have finitely many equilibria, and the remaining cases have infinitely many singular points.
If
has five simple real linear factors
, with
, so
, and system (
12) becomes
This system has one finite singularity at the origin of coordinates. In the chart
system (
13) writes
It is easy to check that this system has five hyperbolic nodes at
,
,
,
and
with alternative kind of stability. See its phase portrait in
Figure 4a.
If
has three simple linear factors
, with
and two complex linear factors
, so
System (
14) has one finite singularity at the origin of coordinates. In the chart
system (
14) written as
We can easily verify that this system has three hyperbolic nodes at
,
and
with alternative kind of stability. Consequently its phase portrait is given in
Figure 4b.
If
has one simple real linear factor
and four complex factors
, so
, and system (
12) becomes
This system has one finite singularity at the origin of coordinates. In the chart
system (
15) has one infinite hyperbolic node at
. So its phase portrait is given in
Figure 4c.
If
has one simple real linear factor
and double complex linear factors
, so
, and its corresponding Hamiltonian system also has the phase portrait given in
Figure 4c.
In the following cases of the Hamiltonian the corresponding Hamiltonian system has infinitely many singular points, and we do not consider them.
has one double real linear factor and three simple real linear factors.
has two double real linear factors and one simple real linear factor.
has one triple real linear factor and two simple real linear factors.
has one triple real linear factor and one double real linear factor.
has one real linear factor of multiplicity four and one simple real linear factor.
has one real linear factor of multiplicity five.
has one double real linear factor, one simple real linear factor and two complex linear factors.
has one triple real linear factor and two complex linear factors.
This completes the proof of Theorem 1 for .
7. Proof of Theorem 1 for
In this section, we are interested in studying the quintic homogeneous Hamiltonian systems with finitely many equilibria given by
where
a,
b,
c,
d,
e,
f and
g are real parameters. Its corresponding Hamiltonian function is
The infinite singularities of this system (
16) are determined by the real linear factors of
that can have sixteen different kinds of linear factors. Where we shall see that only the four cases I, II, III and IV system (
16) have finitely many equilibria, and the remaining cases have infinitely many singular points.
In summary Theorem 1 is proved for .
8. Conclusions
The main objective of our research revolves around the classification of the phase portraits of five categories of Homogeneous Hamiltonian differential systems of degrees 1, 2, 3, 4, and 5, characterized by a finite number of equilibria. The focus of our study is to present novel results specifically related to the homogeneous Hamiltonian polynomial differential systems with degrees 3, 4, and 5.
Author Contributions
Conceptualization, R.B. and J.L.; methodology, J.L.; software, R.B.; validation, R.B. and J.L.; formal analysis, R.B. and J.L.; investigation, R.B. and J.L.; writing—original draft, R.B. and J.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The datasets analyzed during the current study are available from the corresponding author on reasonable request.
Acknowledgments
The first author is supported by the Directorate-General for Scientific Research and Technological Development (DGRSDT), Algeria. The second author is partially supported by the Agencia Estatal de Investigación grant PID2019-104658GB-I00, the H2020 European Research Council grant MSCA-RISE-2017-777911, AGAUR (Generalitat de Catalunya) grant 2022-SGR 00113, and by the Acadèmia de Ciències i Arts de Barcelona.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bautin, N.N. On the number of limit cycles which appear with the variation of coefficients from an equilibrium position of focus or center type. Mat. Sbornik. 1952, 30, 181–196. [Google Scholar]
- Dulac, H. Détermination et integration d’une certaine classe d’équations différentielle ayant par point singulier un centre. Bull. Sci. Math. Sér. 1908, 32, 230–252. [Google Scholar]
- Kapteyn, W. On the midpoints of integral curves of differential equations of the first degree. Nederl. Akad. Wetensch. Verslag. Afd. Natuurk. Konikl. Nederland. 1911, 19, 1446–1457. [Google Scholar]
- Kapteyn, W. New investigations on the midpoints of integrals of differential equations of the first degree. Nederl. Akad. Wetensch. Versl. Afd. Natuurk. 1912, 20, 1354–1365. [Google Scholar]
- Schlomiuk, D. Algebraic particular integrals, integrability and the problem of the center. Trans. Am. Math. Soc. 1993, 338, 799–841. [Google Scholar] [CrossRef]
- Vulpe, N.I. Affine invariant conditions for the topological distinction of quadratic systems with a center. Differentsial’nye Uravneniya 1983, 19, 371–379. (In Russian) [Google Scholar]
- Malkin, K.E. Criteria for the center for a certain differential equation. Volz. Mat. Sb. Vyp. 1964, 2, 87–91. (In Russian) [Google Scholar]
- Vulpe, N.I.; Sibirskii, K.S. Centro–affine invariant conditions for the existence of a center of a differential system with cubic nonlinearities. Dokl. Akad. Nauk SSSR 1988, 301, 1297–1301. (In Russian) [Google Scholar]
- Chavarriga, J.; Giné, J. Integrability of a linear center perturbed by a fourth degree homogeneous polynomial. Publ. Mat. 1996, 40, 21–39. [Google Scholar] [CrossRef]
- Chavarriga, J.; Giné, J. Integrability of a linear center perturbed by a fifth degree homogeneous polynomial. Publ. Mat. 1997, 41, 335–356. [Google Scholar] [CrossRef]
- Buzzi, C.A.; Llibre, J.; Medrado, J.C. Phase Portraits of reversible linear differential systems with cubic homogeneous polynomial nonlinearities having a non-degenerate center at the origin. Qual. Theory Dyn. Syst. 2009, 7, 369–403. [Google Scholar] [CrossRef]
- Artés, J.C.; Llibre, J. Quadratic Hamiltonian vector fields. J. Differ. Eq. 1994, 107, 80–95. [Google Scholar] [CrossRef]
- Dumortier, F.; Llibre, J.; Artés, J.C. Qualitative Theory of Planar Differential Systems; Universitext; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Neishtadt, A.I.; Sheng, K. Bifurcations of phase portraits of pendulum with vibrating suspension point. Commun. Nonlinear Sci. Numer. Simul. 2017, 47, 71–80. [Google Scholar] [CrossRef]
- Tian, Y.; Zhao, Y. Global phase portraits and bifurcation diagrams for reversible equivariant Hamiltonian systems of linear plus quartic homogeneous polynomials. Discret. Contin. Dyn. Syst. Ser. B. 2021, 26, 2941–2956. [Google Scholar] [CrossRef]
- Neumann, L.D.A. Classification of continuous flows on 2–manifolds. Proc. Am. Math. Soc. 1975, 48, 73–81. [Google Scholar] [CrossRef]
- Markus, L. Structure of ordinary differential equations in the plane. Trans. Am. Math Soc. 1954, 76, 127–148. [Google Scholar] [CrossRef]
- Peixoto, L.M.M. Dynamical Systems. In Proceedings of the Symposium held at the University of Bahia, Salvador, Brazil, 26 July–14 August 1961; Academic Press: New York, NY, USA, 1973; pp. 389–420. [Google Scholar]
- Arnold, V.I. Mathematical Methods of Classical Mechanics; Springer: Berlin/Heidelberg, Germany, 1988. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




