1. Introduction
Nowadays, object detection and tracking has not only grabbed the interest of many because of its recent breakthrough research and wide range of applications but also its equal significance in academia and real-time applications [
1], including monitoring security, transportation surveillance, autonomous driving, and robotic vision. Various sensing modalities such as computer vision (CV) radar and Light Detection and Ranging (LIDAR) are available for object tracking and detection. Unlike tracking a single specific object, multiple-object tracking (MOT) can be very complex [
2]. In addition to the problems in tracking single objects, MOT in a single category should make new tracked objects utilizing identification outcomes, terminate objects whenever they go out of the field of camera view, or recognize lost objects when they appear again [
3]. On top of that, pose changes; the problems of occlusion and background clutter are more complicated than those in tracking single objects. To manage such difficulties, certain DL-related techniques were devised. For instance, it is possible to replace traditional features with features derived from deep neural networks for associating detection outcomes, though the features were learned from tasks of recognition or classification [
4]. In addition, it has been proven that the performance becomes enhanced if the attributes of MOT, such as temporal order or spatial attention maps, are explored. As well, certain end-to-end DL structures were devised for feature extraction not merely for appearance descriptors but for motion data. Although DL techniques are potentially applicable to MOT issues [
5], there is much room to enhance the tracking efficiency using the power of DL because of its great achievements in the domain of image recognition and classification [
6].
In DL, the problem of object detection refers to the task of labeling various objects in an image frame with their accurate classes and estimating the bounding box with a higher degree of probability. The learning accuracy in DL rests on previous experiences or the number of samples [
7]. Higher accuracy in the performance can be achieved with a greater number of samples. These days’ data are abundantly available, which makes DL the right choice. Unlike conventional (shallow) learning, thousands of images are needed by DL to gain optimal outcomes [
8]. The term “shallow” is contrary to “deep”. Hence, DL can be computationally intensive and problematic to engineers. It requires high-performing GPUs to offer fast motion and object detection [
9]. DL methods are availed in domain-specific and generic object tracking and detection. Deep CNN was employed as a backbone in the detection network for the extraction of crucial features from input images or video frames. Such attributes were utilized for classifying and localizing objects in similar frames [
10].
Wang et al. [
11] recommend a fast and robust camera–LiDAR fusion-based MOT technique that accomplishes better tradeoffs between speed and accuracy. Based on the features of LiDAR sensors and cameras, a deep association mechanism was devised and embedded in the presented MOT model. The proposed method realized MOT in a 2D domain if the object is distant and detected only by the camera, and the updating of 2D trajectory includes 3D data that can be attained if the object appeared in the LiDAR field of view to accomplish a smooth fusion of 2D and 3D trajectories. Wang et al. [
12] introduced an MOT technique based on GNN. The major concept is that GNN relationships between different size objects in spatial and temporal domains are crucial for learning discriminatory features for data association and detection.
The author in [
13] developed an object detection technique by revamping YOLOv3, and real-time MOT can be performed by using Deep SORT for tracking the target through these data association and movement representation models. It is a tracking-by-detection technique. Guo and Zhao [
14] proposed a new architecture for online 3D MOT to remove the impact of unknown biases and the inherent uncertainty in point clouds. A constant turn rate and velocity (CTRV) motion were used for estimating future motion states that can be smoothed using the cubature Kalman filter (CKF) model. An adaptive cubature Kalman filter (ACKF) is presented to update the tracked state powerfully and to remove the effect of unknown bias.
Rafique et al. [
15] developed a Maximum Entropy Scaled Super-Pixels (MEsSP) Segmentation technique that encapsulates super-pixel segmentation depending on Entropy Model and exploits local energy terms for labeling the pixel. After pre-processing and acquisition, the image is initially segmented using two various approaches: MEsSP and Fuzzy C-Means (FCM). Lastly, based on the categorized objects, a DBN allocates the related label to the scene, intersection over dice similarity coefficient, and union scores. Lusardi et al. [
16] developed a GNN-based architecture for MOT that integrates association and detection with the usage of novel re-detection features. The combination of multiple appearance features within the architecture is explored to improve tracking accuracy and obtain the best representation. Data augmentation with random noise and random erase are used for improving the robustness during tracking. Jiang et al. [
17] proposed the Residual Neural Network (RNN) for target tracking and achieved high accuracy when compared with Multi-Domain (MDnet) in three complex problems such as deforms or rotates, similar target interference, and complex scenes. Wang et al. [
18] proposed a solution for motion blur using the Motion Enhance Attention (MEA) module to detect far-away objects from the camera for target tracking using a Dual Correlation Attention (DCA) module, but the tracking performance is not better due to the above-combined module. CenterTrack [
19] calculates the object displacements with inputs to associate the objects. FairMOT [
20] finds each object in a particular detection dataset and find out to discriminate between those to learn tracking from stationary images. TraDes [
21] and GTR [
22] is a new method proposed to attempt multiple-object tracking. MOTR [
23] and QDTrack [
24] carried out the multi-object tracking with transformer and Quasi-Tense similarity learning, but both fall in classification errors such as large-scale datasets. Multi-object detection and tracking are categorized into neural networks, fuzzy logic, and meta-heuristic algorithms based on the approach in soft computing studies [
25]. To solve the optimization problems, meta-heuristic algorithms are proposed that seek to exit local optimal points. Recently, the exploit of meta-heuristic optimization algorithms has occupied many research studies to detect and track objects because of their facility to estimate the location of objects accurately [
25]. In contrast to the traditional optimization method [
26,
27,
28] that performs an iterative search using a set of elements in video frames, this approach carries the efficient evolutionary computing method into object tracking. The elements are updated using a fitness function and make some iterations in the object location.
In addition, an object tracker can be divided into three core works, namely feature representation, observation, and motion features [
29]. It generates the feature representation of the object, which is then used for comparison under the observation. Based on the association results, the motion feature makes a prediction of the object’s location. This, without uncertainty, can bring better tracking performance due to more effective searches in the search space.
Nonetheless, the need for improvements in other works of object tracking is mainly unseen in the literature. A possible solution to the weak feature problem is the adoption of deep learning-based feature representation, which could potentially improve the accuracy and robustness of the tracking.
This study develops a new reptile search optimization algorithm with deep learning-based multi-object detection and tracking (RSOADL–MODT) technique. The presented RSOADL–MODT model applies path augmented RetinaNet (PA–RetinaNet) based object detection module, which improves the feature extraction process. To improvise the network potentiality of the PA–RetinaNet method, the RSOA is utilized as a hyperparameter optimizer. Finally, the quasi-recurrent neural network (QRNN) classifier is exploited for classification procedures. A wide-ranging experimental validation process takes place on DanceTrack and MOT datasets for examining the effectual object detection outcomes of the RSOADL–MODT approach.
2. Materials and Methods
In this study, an automated MOT using the RSOADL–MODT technique has been developed for the recognition and tracking of the objects that exist with position estimation, tracking, and action recognition. It follows a series of processes, namely PA–RetinaNet-based object detection, RSOA-based hyperparameter tuning, QRNN object classification, and object tracking.
Figure 1 represents the workflow of the RSOADL–MODT approach.
2.1. Object Detection Using PA–RetinaNet
In this work, the presented RSOADL–MODT technique exploited the PA–RetinaNet-based object detection module. The PA–RetinaNet incorporates two parallel sub-networks, a backbone network, and a path augmentation model with certain tasks [
30]. The two sub-networks are used for bounding box regression and object classification. The backbone network adopts the Feature Pyramid Network (FPN), a new convolution network, to evaluate the feature maps of input images. A path augmentation model can be improved to make lower layer data easier for transmission correspondingly. The FPN can be adopted as a backbone network of PA–RetinaNet. FPN increases a typical convolution network with lateral and top-down pathway connections, which allows the effective creation of a multiscale, rich FPN from the single-resolution input images. Every level of the pyramid detects an object at various scales.
The proposal of the PA–RetinaNet detector improves and inherits the architecture of RetinaNet. With the addition of the bottom-up path makes the lowest layer data easier to transmit, reduces the data transmission path, and produces a good result. The lower-level feature map mostly perceives the local information, edge, and corner of an image and additional information, whereas the higher-level feature map reflects semantical data of the entire objects. A bottom-up path can be improved to make lower-layer data easier to transmit. Thus, the addition of a bottom-up path is essential to increase the reasonable classification ability of each feature and semantically propagate strong features in FPN.
Based on the description in FPN, layers of a similar network phase produce a feature map of similar spatial size, and every feature level corresponds to a single phase. ResNet as a fundamental framework and characterize feature level of the FPN as {}. The space size can be downsampled gradually to 1/4 of the prior layer size. {} is recently produced feature maps respective to {}. It should be noted that is . Now, ⊕ this signifies the lateral connections of the high-layer fine feature map and low-layer coarse feature map + , which produce a novel feature map + . First, every feature map can be down-sampled using × convolution layers with the stride of , providing a similar resolution as + and added to it through a lateral connection. Next, the combined feature map produces + via another convolution layers as input to the following two subnetworks. This is an iteration procedure until is produced. In these modules, channel feature map is used, and a ReLu operation can be implemented afterward in every convolution layer. The newest feature map, {}, is later pooled to attain the feature grid. The two subnets are the box regression subnet and the classification subnet.
The proposal of the box regression subnet can be the same as the classification subnet, but it dismisses in 4A linear output for every spatial position. The input feature mapping of channels can be attained from the presented layer in the classification subnet. First, the subnet uses four convolution layers. Every convolution layer contains filters, the ReLu activation, convolution layer with KA filters, and sigmoid activation output KA binary prediction for every spatial position. The classification subnet forecasts the probability that every K object class and anchor will exist at every spatial location, and if one exists, then the box regression subnet regresses the offset from every anchor box to the nearer ground-truth object.
2.2. RSOA-Based Hyperparameter Tuning
For enhancing the network potentiality of the PA–RetinaNet method, the RSOA is utilized as a hyperparameter optimizer. RSOA is a metaheuristic algorithm based on the natural hunting strategies of crocodiles [
31]. The functioning of RSOA is based on two stages: the encircling and the hunting phases. The RSOA switch between the hunting search and the encircling phases and the shift between dissimilar stages are implemented by splitting the number of iterations into four different parts. RSOA begins by stochastically producing a candidate solution based on the subsequent formula:
In Equation (1), initialization matrix, .P. signifies population size (rows of initialization matrix), randomly generated values, signifies dimensions (columns of initialization matrix) of the optimization problems, and and , represents the lower and upper bounds.
The encircling stage is an exploration of a higher-density area. During the encircling stage, belly and high walking are stimulated by the crocodile movement, which plays a crucial role. This movement does not assist in catching the prey however assists in discovering a search space.
From the expression,
denotes the optimum solution attained at
location,
characterizes a randomly generated value,
displays the existing iteration count, and the maximal amount of iterations is characterized by
T.
indicates the value of the hunting operator of
solution at
location. The value of
can be defined by Equation (4):
where
denotes the sensitivity parameter and describes the exploration results. Additional function termed
, whose objective is to decrease the search region, is evaluated by Equation (5):
where
denotes the randomly generated integer within
. Now,
signifies the overall quantity of solution candidates.
characterizes a random location for the
solution.
denotes a random (arbitrary) integer ranges amongst
,
signifies a value of smaller magnitude. Modification is made to incorporate RSOA into the framework of object tracking. Prior to the initiation of tracking, a representation of the target object is extracted using the feature representation from the first frame and is stored as a reference for comparison. Equations (1)–(5) represents a potential candidate for the tracking solution and are then initialized in a given search space.
ES
called Evolutionary Sense, is a probability-based ratio. The mathematical expression can be given by:
In Equation (6),
denotes a randomly generated value.
is evaluated by Equation (7):
where
denotes the sensitivity boundary that controls the exploration accuracy,
indicates the average location of the
solution and is evaluated by Equation (8):
The hunting stage, similar to the encircling stage, has two approaches, such as hunting cooperation and coordination. These two approaches are used for locally traversing the searching space and assisting in targeting the prey (search for an optimal solution). In addition, based on the iteration, the hunting stage can be divided into two parts. The hunting coordination approach can be performed for iteration ranges from
to
, whereas the hunting cooperation can be performed from
to
. A stochastic coefficient is used for traversing the local search space to produce optimum solutions. Equations (9) and (10) are utilized for the exploitation stage:
where
denotes the
location in the optimum solution obtained in the existing iteration. Similarly,
signifies the hunting operator that is evaluated using Equation (4).
Figure 2 depicts the flowchart of RSA. During the update process, a feature representation is extracted and compared to the object using an exact observation model called a fitness function in RSOA Equation (11).
The RSOA method has derived a fitness function from having enhanced outcomes. It has determined a positive value for signifying the better outcome of the candidate solutions. Here, the reduced classifier error rate is treated as the fitness function, as presented in Equation (11).
2.3. Classification Using QRNN Model
For object classification purposes, the QRNN model is used in this work (Algorithm 1). The classification problem is hard to extend to large-scale datasets. The QRNN is proposed to decrease the computation efforts of the recurrent step in LSTM [
32]. QRNN is a hybrid neural network of CNNs and LSTMs, which combines the benefits of both. In contrast with LSTM, QRNN is extremely parallelizable to CNN. Blue represents a parameterless function running parallel alongside the channel or feature dimension. Brown represents convolution or matrix multiplication. Contiguous blocks imply that computation is implemented simultaneously. The LSTM is decomposed into a blue element and brown linear blocks, whereas computation at every time step depends on the prior outcomes.
Every layer of QRNN integrates two seed components, such as pooling and convolution layers in CNN. Both layers permit fully parallel computation: the pooling layer supports parallelization across feature dimensions and mini-batch; the convolutional layer supports spatial dimensions (viz., sequence dimension) and parallelization across mini-batches.
The equation of the QRNN unit has been demonstrated below:
From the expression, where denotes the input series of -dimensional vectors, signifies the mask convolution and the timestep dimension, indicates the convolutional filter bank in , and represents the width of the filter. The first three expressions are the convolutional part of QRNN and generate -dimensional sequence , and . The symbol signifies component-wise multiplication. Especially, QRNN exploits a forget gate that is “dynamic average pooling”.
A single QRNN implements three multiply-vector operations, as indicated in Equation (2) that depend on the input series X without dependence on preceding outputs, such as
. With known input, this multiply-vector operation
is predefined in various timesteps. Consequently, weight matrices with an enormous quantity of memory no longer have to be loaded at every timestep. In the presented method, the cost of DRAM is decreased once the timestep needed to conduct grows as follows:
where
denotes the combined result matrix;
indicates the number of hidden layer neurons;
signifies the input sequence length.
becomes a tensor while considering minibatch
.
| Algorithm 1: QRNN Model |
Input: merged matrix initial hidden state , bias vector Output: hidden state tensor and output tensor Parameter settings: number of hidden layer neurons, mini batch, output sequence length for , , , do for do return and
|
3. Performance Validation
This paper presents the details of an experimental dataset and evaluation metrics. It demonstrates the effectiveness of the proposed method by comparing its performance to state-of-the-art methods on benchmark datasets. Next, an ablation study was conducted to investigate how our PA–Retinanet, reptile search optimization, and classification method were used to measure the performance of the approach.
DanceTrack [
33] and MOT17 [
34] datasets are used to evaluate the proposed method. DanceTrack [
33] is a large-scale dataset for multi-object tracking in complex scenes such as uniform appearance and diverse motion, and it has 40 videos for training, 25 videos for validation, and 35 videos for testing. MOT17 [
34] is a widely used dataset containing seven sequences for training and seven for testing, and it consists of crowded street scenes with linear object motion.
In order to evaluate the proposed method, the following tracking metrics are utilized. MOTA—The Multiple Object Tracking Accuracy (MOTA) [
35] metric computes tracking accuracy with detection accuracy. MOTA weighs detection performance more greatly than association performance. MOTA is computed using the FP (False Positive), FN (False Negative), ID switches (IDs), and Mostly Tracked (MT). IDF1—The Identification F1 Score (IDF1) [
36] matches ground truth and calculations on the trajectory level and computes a corresponding F1 score. IDF1 focuses on measuring association performance. HOTA Higher Order Tracking Accuracy (HOTA) [
37] aims to combine the evaluation of detection and association relatively.
Figure 3 shows the sample images.
Experiments are conducted on PyTorch with the runtime machine in eight NVIDIA 2080 Ti GPUs. It utilizes the variant of ResNet as the backbone network for fast convergence and object detection. The training model is trained with RSOA for the tuning of hyperparameters, and it boosts the accuracy. The initial learning rate is 0.0001 and produces the length of eight video clips and then trains with a batch size of eight videos on eight GPUs, ensuing in an effective batch size of 64.
In DanceTrack, 70 epochs on the training sets and the learning rate decreases by a factor of 10 at the 10th epoch. From the initial length of the video clip, it gradually increases the clips to 3, 4, and 5 at the 30th, 40th, and 50th epochs, respectively. The gradual increment of video clip length improves training efficiency and constancy. The training step takes about 8 h on two 2080 Ti GPUs.
In
Table 1 and
Figure 4, the overall tracking performance of the RSOADL–MODT method is examined in terms of evaluation metrics on the DanceTrack dataset. The results indicate that the RSOADL–MODT technique accomplishes improved performance under each iteration. It is noticed that the RSOADL–MODT technique gains an average MOTA of 87.67, MOTP of 0.325, IDF1 of 51.21%, Idsw of 4272, recall of 98.52, precision of 97.73, and MT of 537.
The TACY and VACY of the RSOADL–MODT approach on the DanceTrack dataset is defined in
Figure 5. The Figure implied that the RSOADL–MODT technique had improved performance with increased values of TACY. Visibly, the RSOADL–MODT method has reached maximal TACY outcomes.
The TLOS and VLOS of the RSOADL–MODT method on the DanceTrack dataset is defined in
Figure 6. The Figure inferred that the RSOADL–MODT method has better performance with minimal values of TLOS and VLOS. Particularly, the RSOADL–MODT approach has minimal VLOS outcomes.
A comparison study is made on the DanceTrack dataset in
Table 2 to highlight the enhanced performance of the RSOADL–MODT technique [
31].
Figure 7 shows the comparative assessment of the RSOADL–MODT technique in terms of MOTA, IDF1, recall, and precision. The results indicate that the RSOADL–MODT technique reaches improvised results. Based on the MOTA value RSOADL–MODT technique results in a higher MOTA of 87.67 while the CenterTrack [
19], FairMOT [
20], TraDes [
21], GTR [
22], and MOTR [
23] models attain decreased MOTA values.
In
Table 3 and
Figure 8, the overall tracking performance of the RSOADL–MODT method technique is examined in terms of MOTA, MOTP, IDF1, IDsw, and MT on the MOT17 dataset. The results indicate that the RSOADL–MODT technique accomplishes improved performance under each iteration. It is noticed that the RSOADL–MODT technique gains an average MOTA of 74.67, MOTP of 0.321, IDF1 of 72.31, Idsw of 4331, recall of 98.40, a precision of 97.63, and MT of 623.
The TACY and VACY of the RSOADL–MODT model on the MOT17 dataset can be defined in
Figure 9. The Figure implied that the RSOADL–MODT enrich methodology has displayed enhanced performance with maximal increased values of TACY and VACY, notably that the RSOADL–MODT technique has reached maximal TACY outcomes.
The TLOS and VLOS of the RSOADL–MODT algorithm on the MOT17 dataset can be defined in
Figure 10. The Figure inferred that the RSOADL–MODT technique had revealed better performance with the smallest values of TLOS and VLOS. Visibly, the RSOADL–MODT technique has reduced VLOS outcomes.
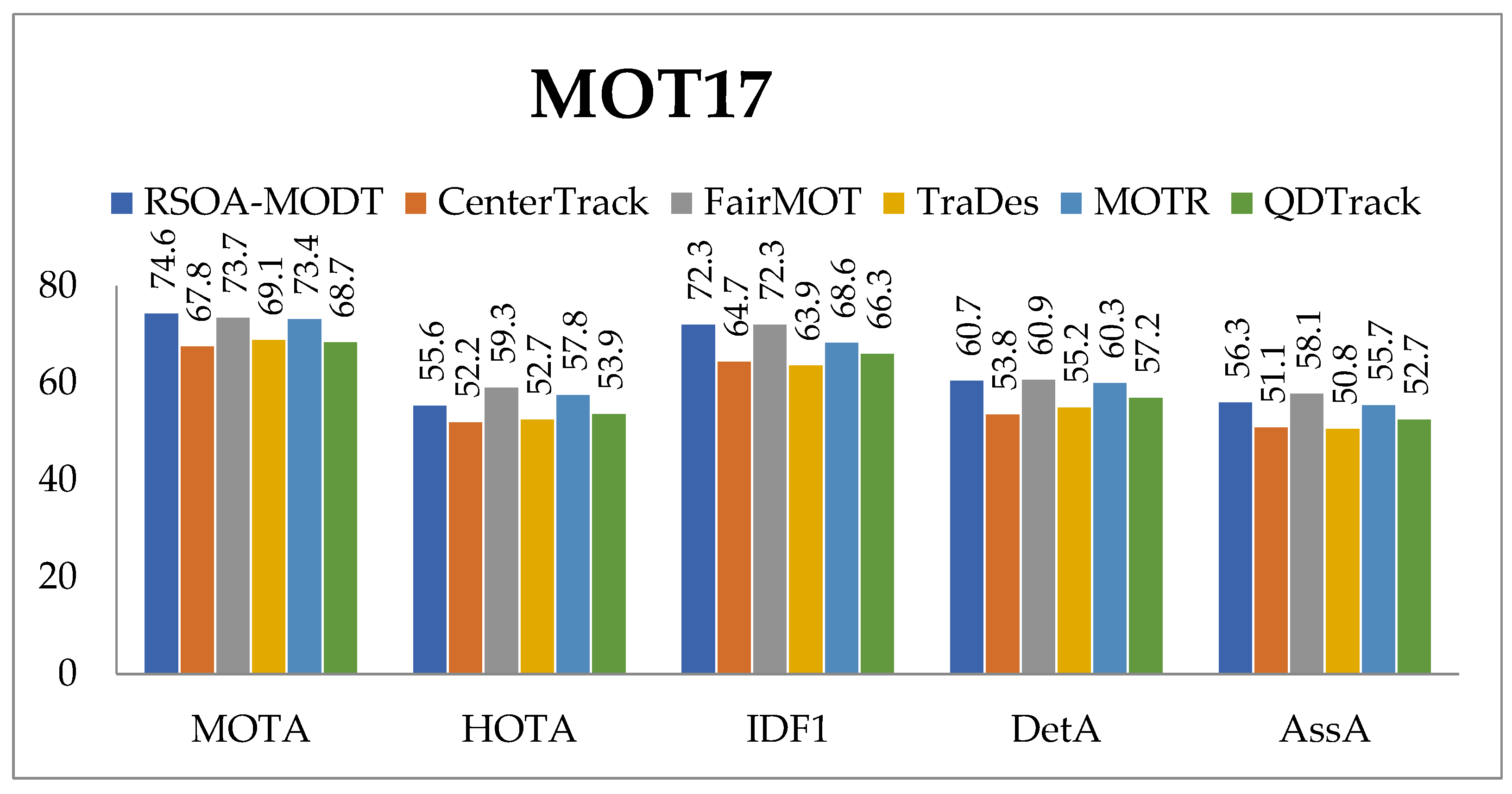
To point out the enhanced performance of the RSOADL–MODT method, a comparative analysis is made on the MOT17 dataset in
Table 4.
Figure 11 exhibits the comparative assessment of the RSOADL–MODT approach in terms of MOTA, IDF1, recall, and precision. The results indicate that the RSOADL–MODT technique reaches improvised results. Based on MOTA, the RSOADL–MODT algorithm result in a higher MOTA of 74.67, while the CenterTrack [
19], FairMOT [
20], TraDes [
21], GTR [
22], MOTR [
23] and QDTrack [
24] methods attain decreased MOTA values. In the meantime, based on IDF1, the RSOADL–MODT technique results in a higher IDF1 of 72.31 while the CenterTrack [
19], FairMOT [
20], TraDes [
21], GTR [
22], MOTR [
23] and QDTrack [
24] models attain decreased IDF1 values.
Ablation Study
To demonstrate the effectiveness of the proposed method, an ablation study on the validation of DanceTrack and MOT17 train sets by performing 3-fold cross-validation following [
38]. This study analyzes the main aspects of our method: (i) the advantages of using a PA–RetinaNet object detector and (ii) the hyper-parameter optimization method across different levels.
At the initial stage, the presented RSOADL–MODT technique applies path augmented RetinaNet (PA–RetinaNet) based object detection module, which improves the feature extraction process. For optimization and to improvise the network potentiality of the PA–RetinaNet method, the Reptile Search Optimization Algorithm (RSOA) is utilized as a hyperparameter optimizer. The optimization difficulty for object detection is greatly relieved. It combines the feature extractor with a PA–RetinaNet detector and reptile search optimization and observes that it achieves the best performance with 87.6 MOTA and 51.2 IDF1. MOTA and IDF1 were improved, and the IDs were significantly reduced. MOTA and IDF1 are calculated for overall evaluations. Nevertheless, this initiative approach can be used to progress MOTA and IDF1 further. YOLOx proposal does not perform well enough in small datasets such as MOT17 due to its data-hungry nature, and it works well in large datasets such as DanceTrack [
24]. When compared to the QDTrack, the proposed method gives a sufficient improvement in MOT17.
The results indicate that base object detectors with classification feature embeddings are adequate for multiple-object tracking with effective optimization. This method produces reasonable results and achieves the best overall scores with MOTA and IDF1. Additionally, an optimization algorithm with deep learning boosts the performance on all metrics while tuning hyperparameters and, finally, slight computation in the method. In addition, better computational outcomes have been obtained by metaheuristics with the precise optimization algorithm. When compared to the state-of-the-art methods given in
Table 4, the proposed method is slightly less computationally expensive.
The proposed method finds that if it concerns the above features with hyper-parameter tuning, the result on the DanceTrack dataset shows slight improvement, and long-time occlusion between the objects should be improved using meta-heuristic optimization algorithms in the future.
Table 4 reports a significant improvement of MOTA, IDF1, and HOTA over state-of-the-art techniques, and it shows that similar tracking performance can be achieved by using optimization when performing the tracking. Given the sole features of the datasets, these results highlight the versatility of the approach to utilize the right methods for different scenarios.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}