Abstract
Human society always wants a safe environment from pollution and infectious diseases, such as COVID-19, etc. To control COVID-19, we have started the big effort for the discovery of a vaccination of COVID-19. Several biological problems have the aspects of symmetry, and this theory has many applications in explaining the dynamics of biological models. In this research article, we developed the stochastic COVID-19 mathematical model, along with the inclusion of a vaccination term, and studied the dynamics of the disease through the theory of symmetric dynamics and ergodic stationary distribution. The basic reproduction number is evaluated using the equilibrium points of the proposed model. For well-posedness, we also test the given problem for the existence and uniqueness of a non-negative solution. The necessary conditions for eradicating the disease are also analyzed along with the stationary distribution of the proposed model. For the verification of the obtained result, simulations of the model are performed.
1. Introduction
For the control and extinction of COVID-19, several effective measurements have been taken from many researchers and policymakers of each country of the globe. Many of them are very economical and have produced a disturbance in the routine activities of social media and psychological effects. Controlling of the said disease viruses for all people showing signs of infection or not is the significant and key work of the higher-ups and managerial staff. Still now in the process of developing safety against COVID-19, the most important tool is vaccination [1,2]. This infection may spread through human-to-human contact in the society, like (MERS-CoV), which is transmitted from civet cats into the human environment. Various efforts have been made against it, which can be studied in [3,4].
The mathematical formulation may well present the dynamical behavior of the infectious diseases of different epidemics. Therefore, different approaches of mathematical modeling for the biological dynamics have been used in the past history. Among them is deterministic mathematical modeling, which mostly discusses the idealistic situation of real-world problems. It depends on input and output data. The stochastic modeling is another approach which mostly describes the real situation. It presents both the randomness of various compositions with division and also the deterministic version. Because of the noise terms as an input source, the said division may have dynamics of uncertainty [5,6,7,8].
So, for vaccination, the conversion of real global problems into mathematical terms is a very significant tool for the analysis of epidemics. Epidemiological infections are transferred through mathematical formulation to various types of differential equations and systems of it. Policy makers and many other scholars also provide some ideas and parameters which can be used for reducing infections [9]. From the beginning of the twenty-first century, the conversion of real-world problems to mathematical terms made the information very easy and made the situation very simple regarding future predictions [10,11]. Mostly, the infections are written in mathematical formulation. Different mathematical formulation are applied to mostly infectious diseases. The techniques of mathematical modeling are divided into different mechanisms. Among them are the deterministic, stochastic and difference equations. The stochastic-type approach is much more realistic as compared to other mechanisms of mathematical formulations. Such a scheme type gives the result in the form of up and down for unknown quantities along with the distribution of an approximate solution [10,11,12,13]. For such dynamics, one can study different articles, such as that given in reference [14,15].
The stochastic analysis of real-world phenomena is very good, as it involves both the input and output of the data of that responsible for the transmission of the disease. Due to this, it answers all questions related to infectious disease modeling. It discusses how to construct a mathematical model for infectious disease. It also answers the question of how to formulate the intermediate frequently transmitted disease. The rate of disease and its suitable position in the model is also discussed by the stochastic approach. So for the need of these points, we formulate the COVID-19 problem by the mathematical term of stochastic approach. Changing the densities of different model quantities, we construct the model for the said infection with a long period of time investigation.
Several biological problems have the aspects of symmetry, and this theory has many applications in explaining the dynamics of biological models. The systematic theory of symmetry has several applications in the development and study of models of biological shapes and phenomena. In engineering and physics, symmetries are frequently accurate or nearly so, whereas in the biological sciences, perfect symmetry is uncommon. Because symmetries are only approximations in most biological systems, their application in models is an idealization. This type of idealization is beneficial because it simplifies the mathematical analysis and also because systems with approximated symmetries frequently reflect idealized symmetric models more precisely than ordinary asymmetric ones. The symmetrical methods are especially suited in biological environments where somewhat consistent patterns are found.
The analysis of symmetry features of ODEs and PDEs is a popular and well-established topic (see [16,17]) and provides a valuable tool for better comprehension of the solution’s qualitative behavior. In contrast, a similar theory of SDE symmetries was just recently constructed; the readers are suggested to see [18,19,20]. In this work, we studied a stochastic COVID-19 model by using a very general and elegant approach for solving a SDE via symmetries in a dynamical perspective. Unfortunately, the scale and complexity of many models in mathematical biology renders a brute force application of symmetry methods impractical. In other words, the analysis of SDEs using symmetry methods is non-standard in mathematical biology; thus, we will focus mainly on other available techniques for SDEs and will give less attention to the underlying symmetry methods.
The remaining part of this research paper is organized as follows: In Section 2, we develop the COVID-19 mathematical formulation with stochastic fluctuation in the rate of infection. In Section 3, we present the qualitative analysis of a non-negative solution for a long duration of time to the proposed stochastic model. We give some important conditions for the COVID-19 infection to vanish it from the society in Section 4. In Section 6, the condition for the stationary distribution existence is provided. The scheme of the analytical solution and their graphical representation are given in Section 7. For the interested reader, we conclude the article with some future remarks in Section 8.
2. Models Formulation
The virus of COVID-19 has a proper incubation period and will result in confinement in the beginning from the community and after the detection of disease. Healthy individuals will have an incubation duration before disease onset. We construct the COVID-19 model with five ordinary equations of derivative. The quantities of the model are composed of Susceptible , Immunize or Vaccinated , Asymptomatic or Exposed , Symptomatic or Infectious , hospitalized , and recover individuals , i.e., represents the whole density size, which is varying with time t. The finalized quantities epidemic model for the COVID-19 dynamical behavior with the vaccination effect is given as follows:
The used parameters in the proposed model are given in Table 1.

Table 1.
Description of the parameters.
The vaccination parameter is assumed to be effective in the analyzed article, i.e., it has no cure rate of the COVID-19 virus. By this, powerful immunized density is required when coming into contact with infectious people. It should be noted that shows a big effective vaccine, while represents a vaccine that has no immunity).
The spreading dynamical analysis of the aforesaid COVID-19 problem is fully investigated by the basic reproductive value, which is given as
Further, if , (DFE) is local asymptotic stable if , and it is global asymptotic stable in the same region. Next, if , then DFE is unstable. In such a situation, Equation (1) contains another equilibrium point called the endemic equilibrium (EE) which is local and global asymptotic stable if and not stable if .
It is noted that the uncertainty of the duration of incubation and the variation of detection along with population movements with stochastically given dynamics of the proposed system (1) incorporate random perturbation by transferring into a mathematical investigation. In this article, we take the random perturbation, which is directly related to the changing of Healthy , Immunized or Vaccinated , Asymptomatic or Exposed , Symptomatic or Infected , Hospitalized , and Recover under the effect of white noise as given in the stochastic model
here, are the parameters for the Brownian motions, and are the frequency intensity of the Gaussian white noise.
3. The Qualitative Analysis for the Positive Solution
In this section, we investigate the existence of a positive solution along with the uniqueness of the said solution of the proposed stochastic model (2).
Theorem 1.
We consider as a positive solution of the given stochastic epidemic model (2) is one on with initial approximations . Further, the root will always lie in having one probability, as mostly sure (a.s).
Proof.
As the initial conditions, are coefficients that are pre-defined and local Lipschitz. Therefore, we have unique root of the system over . For extra analysis of more time , we give the reference [21,22]. For computation, the globally nature of the root, we have to derive that almost surely. Let us have a large positive value , all of the initial conditions on the state variable defined in . Consider that for all positive integer , the time for vanishing is
In the whole article, the taking of is chosen. Here, is the void set. From the output of , we know that this increases as k goes to ∞. Set and , almost surely deriving . The verification about the is noted and so, will be in almost surely . So, this will be sufficient to derive that almost surely. This shows that in the given case, there are two positive constant , from and T:
So, let and
Next, we define a mapping as follows:
It is validated that the is a positive operator, and may be conformed from the statement . Consider that and are any arbitrary fixed values. Using for Equation (5) provides
The remaining proof is almost the same as that presented in Theorem 2.1 of [22]. Hence, we must omit it here, and this completes the proof of the theorem. □
4. Extinction
This section is for the exploration of the parameters’ values for the extinction of infection given in model (2). We derive the significant result of our article in the form of a lemma as follows.
Lemma 1.
For any given initial value the solution of system (2) has the following properties:
Furthermore, when holds, then
Proof.
The derivation of Lemma 1 is similar to [21], thus we skip it. □
Lemma 2
([11,12] (High number strong Law)). Consider that is a continuous function of the real output, having a non-global Martingale and finishing at , then
5. Extinction
Define the following threshold quantity:
Now, we construct a sufficient condition to ensure the extinction of COVID-19 in the stochastic formulation (2).
Theorem 2.
Let be a unique and positive solution of the stochastic Formulation (2) with a positive starting data . If the stochastic threshold is strictly less than one, then and classes will go extinct almost surely, i.e.,
Meanwhile,
Proof.
Firstly, we define the following combination linear of and :
where and . By using Itô’s formula to , we obtain
Then, we obtain that
Integrating from 0 to t and then dividing by t on both sides leads to
where and are two local continuous martingales. Then based on the strong law of large numbers, it implies that and . Provided that , taking the superior limit of both sides leads to
Due to the positivity of the solution, we obtain
Now, we will conclude the result presented in (12). From the first equation of the perturbed model (2), we obtain
Under the hypothesis , we have
In the same way, we obtain from the second equation of (2) that
The derivation of the resulting Theorem 2 is completed. □
6. The Stationary Distribution of the Disease
In this section, we assume that the stochastically considered system has no endemic equilibrium point. So, the investigation of stability cannot be used as a scheme for studying epidemic infection. One may say that either the root is a Lie group or not, and if it is, then it must be so with the help of the theory of stationary distribution as the key task, and we may search for the Lie group of the endemic.With this task, we give the following along with the citation of a well-known theorem from Hasminskii [23]. Let
Stationary Distribution
Let be defined on its domain and obey the Markov procedure (homogeneity of time) in with different dynamics as follows:
The defuse matrix is
Lemma 3
for all
([11,12]). Technique has one distribution for its stationary condition if their lie group, the input data, has bounds with continuous boundary. closure have the following properties:
- 1.
- In both sides, open input U and in its neighbor, the smallest eigenvalue of A(t) has bounds that are separate.
- 2.
- If the average time τ (at which a curve starts from x going to the set U) is of finiteness, and for every compact subset . Next, if is an integrating function having measurement π, then
Define a parameter
Theorem 3.
The root of system (2) is ergodic and has one distribution for its stationary point whenever .
Proof.
For the validation of Equation (2) of Lemma (3), we take a positive -operator
where and are the positive constants to be calculated later in the rest of the sections. Using the Itô’s result and the take problem (2), we obtain
So, we have
This implies that
Let
Namely,
Consequently,
In addition, we obtain
here, the fixed will be computed later on. It very difficult to show that
here . Further for the new steps we show that has one and at least one value
Partial order differentiation of with respect to t is as follows
It is very easy to obtain that has a one point of stagnation
Next, the hessian matrix of at is
Definitely, the matrix of the Hessian is definitely positive. Hence, must have a small value . By Equation (23) and by the assumption of the continuity of , we write that has one and at least one constant point in .
Next, we give the formula for a non-negative operator as under
By the application of formula to the said problem, we obtain
leading to the assertion as follows:
where
Next we formulate
where for are minimum constant values to be computed later on. For simplification, we can write in the domain as follows:
Going ahead, we have to derive on , which is similar to how it is shown on the above-cited eight areas.
Case 1. If , then by Equation (27), we obtain
Setting gives for every
Case 2. If , then from Equation (27), we can get
We choose maximally high and maximally low , so we can obtain for any
Case 3. If , then from Equation (27), we obtain
Selecting small thus, we have for every
Case 4. from Equation (27), we obtain
Select small to obtain for each
Case 5. If from Equation (27), we obtain
We choose small , so we can obtain for any
Case 6. If from Equation (27), we obtain
We can choose sufficiently small , so we can obtain for any
Case 7. If from Equation (27), we obtain
By considering the smallest value of , we can obtain for any
Case 8. If from Equation (27), we obtain
Let us select the smallest value of so that we can obtain for any
Case 9. If from Equation (27), we obtain
If , then we can find for each
Case 10. If from Equation (27), we obtain
If , then we can find for each
Case 11. If from Equation (27), we obtain
If , then we can find for each
Case 12. If from Equation (27), we obtain
For the smallest value of , we can obtain for any
So, we reach the concluding remarks that here is a fixed :
Therefore,
Assume that , and is that time at which a path starting from x reaches set D,
By taking the integral of inequality (28) from zero to , considering the expected result, and by application of Dynkin’s expression, we obtain
As , so
for the proof of (3), we obtain . Alternatively, we can say that the model (2) is continuous. So, we write that as and , then one has almost surely. □
By Fatou’s Lemma,
Thus, where K is a compact subset of . It is proved in a direct way by the result (ii) of Lemma 3.
Furthermore, the matrix of diffusion model (2) is as follows:
7. Numerical Simulations
For the validation of our obtained scheme, we establish the graphical representation using the approximate scheme to the model (2). The graphical representation depends on the qualitative analysis of the discussion, and the numerics of the used parameters are epidemiologically justifiable. Further, for the use of a stochastic approach of the RK method of the 4th order, the discretization of model (2) is
is normal distribution satisfying the division of and the difference . Take as the white noise intensities.
For the well dynamics, the stability of the stochastically described model, and optimal controlling, we must point out the parameters values for the numerical simulations of (2).
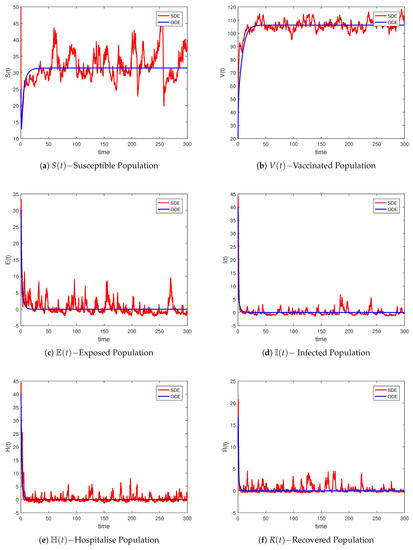
Now here, we give the discussion of the graphical representation and epidemiological feasibility of the proposed problem (2). For this, we use the numerical parameters values of Table 2 (). The initial values for all the agents are also written Table 2 (). Using Theorem 2 gives the conditions for vanishing the epidemic. Few of the achievements are obtained from the analysis of stability in the stochastically investigated model. Theorem 2 is satisfied if the reproduction value is . This shows that the epidemic vanishing probability will be one in the stochastic model. Similarly, if , the idealistic problem (2) will be asymptotic and globally stable. For both curves, they converge to the free critical value. This is given in Figure 1, which implies that COVID-19 infection will die out of society, given some important conditions.The simulations of all the agents are provided in Figure 1a–e.
Table 2.
Parameter values used in the simulation of model (2).
Next, we provide the digital findings for the stationary points of distributions. In Lemma 3, an ergodic condition is used to prove that the system is more realistic in the stochastic approach and has one stationary distribution. The stochastically given problem (2) is proposed for the parameter values given in Table 2 and evaluated as , so using Theorem 3, which is fulfilled, because of small intensities of white noises, the infection reflection will lie. We observe in Figure 2 that the infected system (2) will lie or remain in the mean, which may validate the output of Theorem 3 which implies that the system (2) lies on ergodic stationary distributions. The Susceptible, Vaccinated, Expose, Infected, and Recovered individual stationary distribution numerical simulations can be clearly seen in Figure 2a–f, respectively. Theorem 3 implies that model (2) must be ergodic stationary distributions. Figure 3 confirms this.
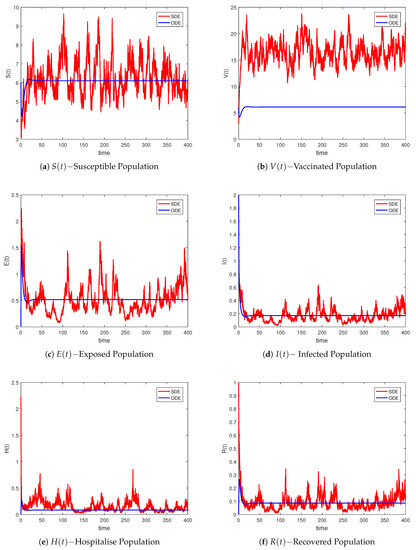
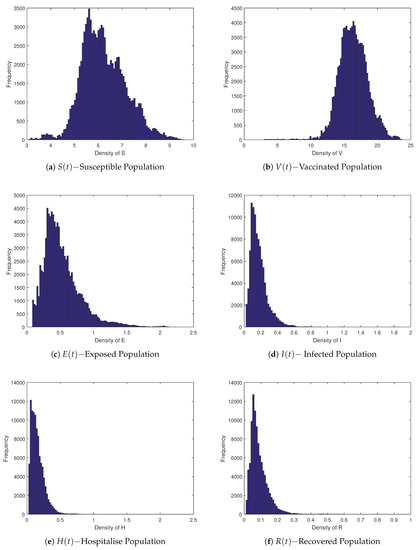
Figure 3.
Ergodic stationary distribution of model (2).
8. Conclusions
In this article, we discussed the asymptotic dynamics of a stochastic COVID-19 epidemic model with a general incident rate and the effect of vaccination. Firstly, we analyzed the considered model for the unique globally non-negative root along with an initial approximation. The stability of the solution of the given model was also computed by the help of the Lyapunov operator. For eliminating the infection from society, we derived the reproduction value . The Lyapunov function method proved that an ergodic stationary division for the non-negative root of the given system exists and is unique, which shows that for , the disease may lie in the community. Few of the numerical simulations have been performed by the approach for the validation of the obtained results. We also will study in our future research work the effect of Levy noises on the dynamics of a more complex population system.
Author Contributions
Conceptualization, H.B. and Z.S.; Formal analysis, H.B. and W.L.; Funding acquisition, Z.S.; Investigation, H.B.; Methodology, H.B. and W.L.; Software, H.B.; Validation, H.B.; Writ draft, H.B. and W.L.; Writ editing, Z.S. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the National Natural Science Foundation of China under Grant 11801249; the Nature Science Foundation of Shandong Province China under Grant ZR2020MF040, and in part by the Open Project of Liaocheng University under Grant 319312101-01.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China under Grant 11801249; the Nature Science Foundation of Shandong Province China under Grant ZR2020MF040, and in part by the Open Project of Liaocheng University under Grant 319312101-01.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Huang, C.; Wang, Y.; Li, X.; Ren, L.; Zhao, J.; Hu, Y.; Zhang, L. Clinical features of patients infected with 2019 novel coronavirus in Wuhan, China. Lancet 2020, 395, 497–506. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Jiao, J.; Zhang, Q.; Zhang, Y.; Ren, X. Stationary Distribution and Extinction in a Stochastic SIQR Epidemic Model Incorporating Media Coverage and Markovian Switching. Symmetry 2021, 13, 1122. [Google Scholar] [CrossRef]
- Atangana, A. Modelling the spread of COVID-19 with new fractal-fractional operators: Can the lockdown save mankind before vaccination? Chaos Solitons Fractals 2020, 136, 109860. [Google Scholar] [CrossRef] [PubMed]
- Tul, A.Q.; Anjum, N.; Zeb, A.; Djilali, S.; Khan, Z.A. On the analysis of Caputo fractional order dynamics of Middle East Lungs Coronavirus (MERS-CoV) model. Alex. Eng. J. 2022, 61, 5123–5131. [Google Scholar]
- Ali, I.; Khan, S.U. Threshold of Stochastic SIRS Epidemic Model from Infectious to Susceptible Class with Saturated Incidence Rate Using Spectral Method. Symmetry 2022, 14, 1838. [Google Scholar] [CrossRef]
- Anwarud, D.; Li, Y.; Shah, M.A. The complex dynamics of hepatitis B infected individuals with optimal control. J. Syst. Sci. Complex. 2021, 34, 1301–1323. [Google Scholar]
- Allen, L.J.S. An introduction to stochastic epidemic models. In Mathematical Epidemiology; Springer: Berlin/Heidelberg, Germany, 2008; pp. 81–130. [Google Scholar]
- Lei, Q.; Yang, Z. Dynamical behaviours of a stochastic SIRI epidemic model. Appl. Anal. 2016, 96, 1–13. [Google Scholar]
- Özdemir, N.; Agrawal, O.P.; Karadeniz, D.; İskender, B.B. Fractional optimal control problem of an axis-symmetric diffusion-wave propagation. Phys. Scr. 2009, T136, 014024. [Google Scholar] [CrossRef]
- Din, A.; Yassine, S. Long-term bifurcation and stochastic optimal control of a triple-delayed Ebola illness model with vaccination and quarantine strategies. Fractal Fract. 2022, 6, 578. [Google Scholar] [CrossRef]
- Khan, A.; Yassine, S. Stochastic modeling of the Monkeypox 2022 epidemic with cross-infection hypothesis in a highly disturbed environment. Math. Biosci. Eng. 2022, 19, 13560–13581. [Google Scholar] [CrossRef] [PubMed]
- Din, A.; Li, Y.; Tahir, K.; Gul, Z. Mathematical analysis of spread and control of the novel corona virus (COVID-19) in China. Chaos Solitons Fractals 2020, 141, 110286. [Google Scholar] [CrossRef] [PubMed]
- Din, A.; Li, Y.; Abdullahi, Y. Delayed hepatitis B epidemic model with stochastic analysis. Chaos Solitons Fractals 2021, 146, 110839. [Google Scholar] [CrossRef]
- Yassine, S.; Khan, A.; Din, A.; Kiouach, D.; Rajasekar, S.P. Determining the global threshold of an epidemic model with general interference function and high-order perturbation. AIMS Math. 2022, 7, 19865–19890. [Google Scholar]
- Alzahrani, E.O.; Khan, M.A. Modeling the dynamics of Hepatitis E with optimal control. Chaos Solitons Fractals 2018, 116, 287–301. [Google Scholar] [CrossRef]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Olver, P.J. Equivalence, Invariants, and Symmetry; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Zhang, T.; Ding, T.; Gao, N.; Song, Y. Dynamical behavior of a stochastic SIRC model for influenza A. Symmetry 2020, 12, 745. [Google Scholar] [CrossRef]
- Gaeta, G.; Rodriguez-Quintero, N. Lie-point symmetries and stochastic differential equations. J. Phys. A Math. Gen. 1999, 32, 8485–8505. [Google Scholar] [CrossRef]
- Gaeta, G. Lie-point symmetries and stochastic differential equations: II. J. Phys. A Math. Gen. 2000, 33, 4883–4902. [Google Scholar] [CrossRef]
- Zhang, X.-B.; Wang, X.-D.; Huo, H. Extinction and stationary distribution of a stochastic SIRS epidemic model with standard incidence rate and partial immunity. Phys. Stat. Mech. Appl. 2019, 531, 121548. [Google Scholar] [CrossRef]
- Din, A.; Saida, A.; Amina, A. A stochastically perturbed co-infection epidemic model for COVID-19 and hepatitis B virus. Nonlinear Dyn. 2022, 28, 1–25. [Google Scholar] [CrossRef] [PubMed]
- Khasminskii, R. Stochastic Stability of Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 66. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).