

Periodic Solution Problems for a Class of Hebbian-Type Networks with Time-Varying Delays

{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- There is not much research on the periodic solution research of system (3), and this study expands its research scope.
- (2)
- On the basis of fully considering the variable delays and coefficients, this article constructs a new function, which can conveniently obtain the stability of system (3).
- (H1) In system (3), for , are —periodic continuous functions.
- (H2) There is constant such that
- (H3) There is constant such that
2. Preliminaries
- (1)
- (2)
- (3)
- .
3. Existence of Periodic Solution
4. Globally Exponential Stability
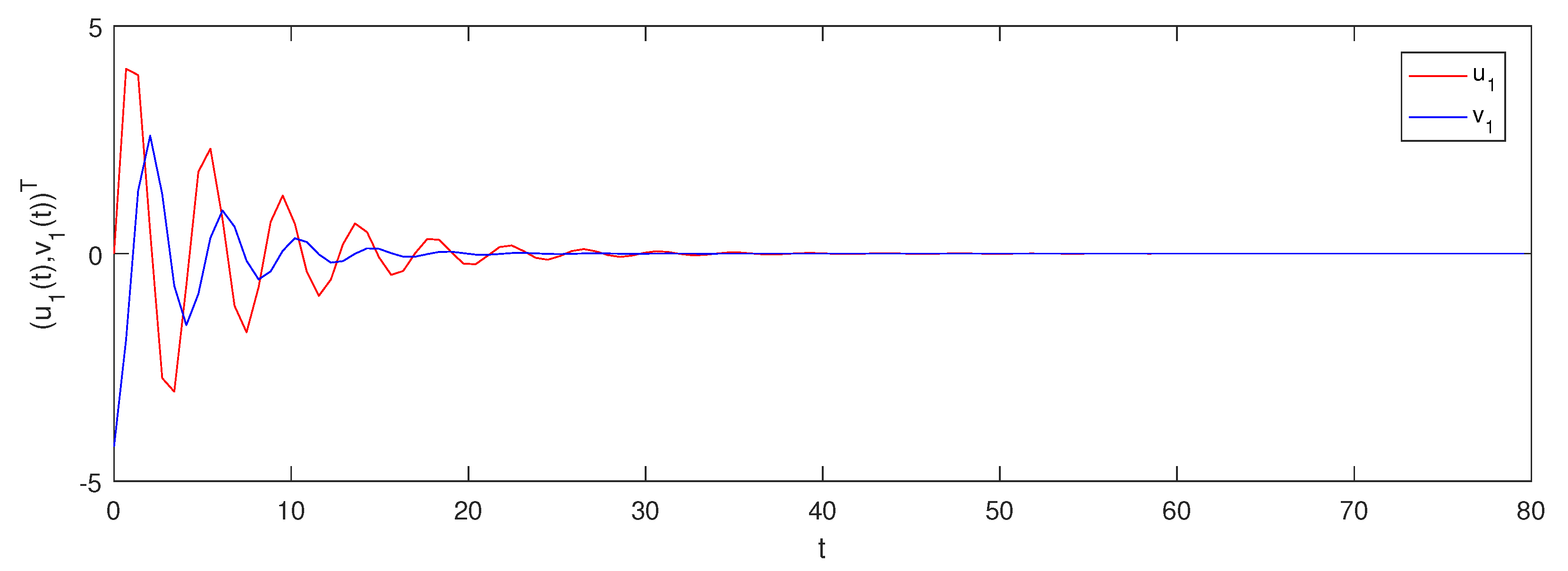
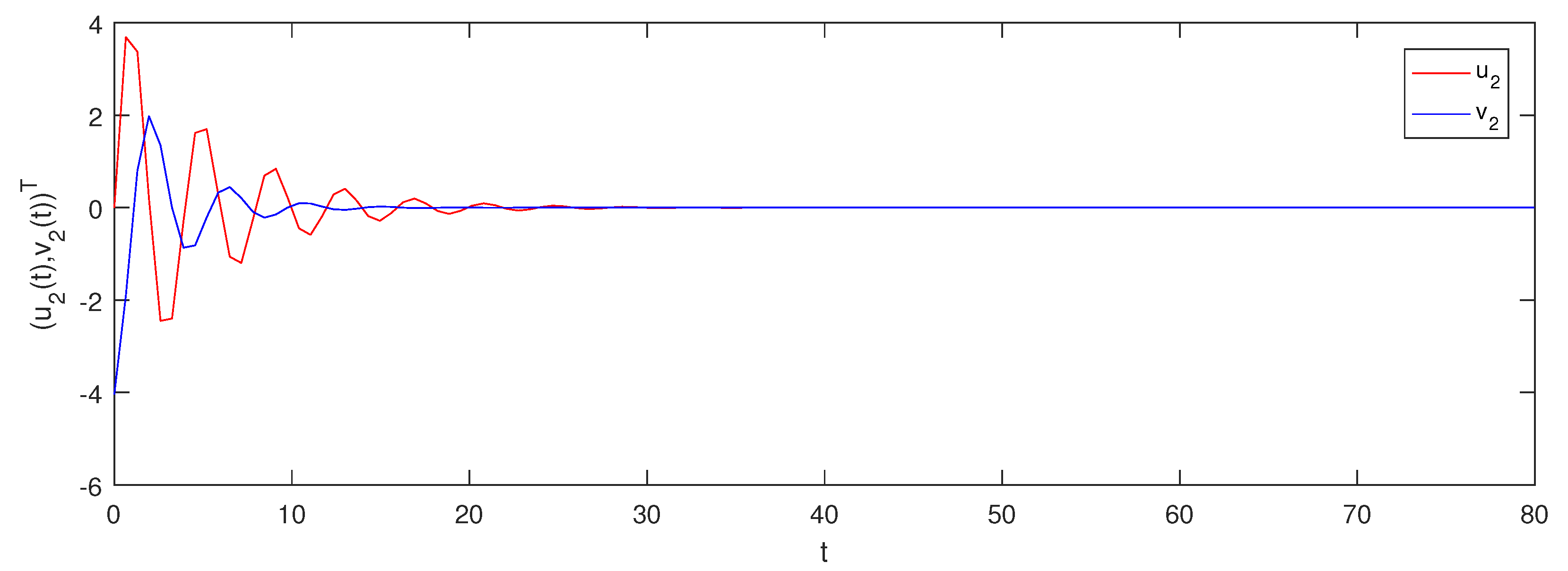
5. Example
6. Conclusions and Discussions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gopalsamy, K. Learning dynamics in second order networks. Nonlinear Anal. Real World Appl. 2007, 8, 688–698. [Google Scholar] [CrossRef]
- Amari, S. Competitive and cooperative aspects in dynamics of neural excitation and self-organization. In Competition and Cooperation in Neural Nets; Lecture Notes in Biomathematics; Springer: Berlin/Heidelberg, Germany, 1982. [Google Scholar]
- Amari, S. Mathematical theory of neural learning. New Gener. Comput. 1991, 8, 281–294. [Google Scholar] [CrossRef]
- Gonzalez, M.; Basin, M.; Vargas, E. Discrete-time high-order neural network identifier trained with high-order sliding mode observer and unscented Kalman filter. Neurocomputing 2021, 424, 172–178. [Google Scholar] [CrossRef]
- Huang, C.; Cao, J. Bifurcations due to different delays of high-order fractional neural networks. Int. J. Biomath. 2022, 15, 2150075. [Google Scholar] [CrossRef]
- Liu, D.; Liu, Z.; Zhang, Y.; Chen, C. Neural network-based smooth fixed-time cooperative control of high-Order multi-agent systems with time-varying failures. J. Frankl. Inst. 2022, 359, 152–177. [Google Scholar] [CrossRef]
- Huang, Z.; Raffoul, Y.; Cheng, C. Scale-limited activating sets and multiperiodicity for threshold-linear networks on time scales. IEEE Trans. Cybern. 2014, 44, 488–499. [Google Scholar] [CrossRef] [PubMed]
- Cao, J.; Liang, J.; Lam, J. Exponential stability of high order bidirectional associative memory neural networks with time delays. Physica D 2004, 199, 425–436. [Google Scholar] [CrossRef]
- Kosmatopoulos, E.; Polycarpou, M.; Christodoulou, M.; Ioannou, P. High order neural network structures for identification of dynamical systems. IEEE Trans. Neural Netw. 1995, 6, 422–431. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Liu, X. An LMI approach to stability analysis of stochastic high-order Markovian jumping neural networks with mixed time delays. Nonlinear Anal. Hybrid Syst. 2008, 2, 110–120. [Google Scholar] [CrossRef]
- Xing, J.; Peng, C.; Cao, Z. Event-triggered adaptive fuzzy tracking control for high-order stochastic nonlinear systems. J. Frankl. Inst. 2022, 359, 6893–6914. [Google Scholar] [CrossRef]
- Wu, W.; Yang, L.; Ren, Y. Periodic solutions for stochastic Cohen—CGrossberg neural networks with time-varying delays. Int. J. Nonlinear Sci. Numer. Simul. 2021, 22, 13–21. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, K. Existence and global exponential stability of a periodic solution to interval general bidirectional associative memory (BAM) neural networks with multiple delays on time scales. Neural Netw. 2011, 24, 427–439. [Google Scholar] [CrossRef] [PubMed]
- Luo, D.; Jiang, Q.; Wang, Q. Anti-periodic solutions on Clifford-valued high-order Hopfield neural networks with multi-proportional delays. Neurocomputing 2022, 472, 1–11. [Google Scholar] [CrossRef]
- Li, Y.; Xiang, J. Existence and global exponential stability of almost periodic solution for quaternion-valued high-order Hopfield neural networks with delays via a direct method. Math. Methods Appl. Sci. 2020, 43, 6165–6180. [Google Scholar] [CrossRef]
- Guo, X.; Huang, C.; Cao, J. Nonnegative periodicity on high-order proportional delayed cellular neural networks involving D operator. AIMS Math. 2021, 6, 2228–2243. [Google Scholar] [CrossRef]
- Cao, Q.; Guo, X. Anti-periodic dynamics on high-order inertial Hopfield neural networks involving time-varying delays. AIMS Math. 2020, 5, 5402–5421. [Google Scholar] [CrossRef]
- Gao, J.; Dai, L. Anti-periodic synchronization of quaternion-valued high-order Hopfield neural networks with delays. AIMS Math. 2022, 7, 14051–14075. [Google Scholar] [CrossRef]
- Huang, C.; Liu, B.; Qian, C.; Cao, J. Stability on positive pseudo almost periodic solutions of HPDCNNs incorporating D operator. Math. Comput. Simul. 2021, 190, 1150–1163. [Google Scholar] [CrossRef]
- Duan, L.; Huang, L.; Guo, Z.; Fang, X. Periodic attractor for reaction—Cdiffusion high-order hopfield neural networks with time-varying delays. Comput. Math. Appl. 2017, 73, 233–245. [Google Scholar] [CrossRef]
- Gaines, R.; Mawhin, J. Coincidence Degree and Nonlinear Differential Equations; Springer: Berlin/Heidelberg, Germany, 1977. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, M.; Yin, H.; Du, B. Periodic Solution Problems for a Class of Hebbian-Type Networks with Time-Varying Delays. Symmetry 2023, 15, 1985. https://doi.org/10.3390/sym15111985
Xu M, Yin H, Du B. Periodic Solution Problems for a Class of Hebbian-Type Networks with Time-Varying Delays. Symmetry. 2023; 15(11):1985. https://doi.org/10.3390/sym15111985
Chicago/Turabian StyleXu, Mei, Honghui Yin, and Bo Du. 2023. "Periodic Solution Problems for a Class of Hebbian-Type Networks with Time-Varying Delays" Symmetry 15, no. 11: 1985. https://doi.org/10.3390/sym15111985
APA StyleXu, M., Yin, H., & Du, B. (2023). Periodic Solution Problems for a Class of Hebbian-Type Networks with Time-Varying Delays. Symmetry, 15(11), 1985. https://doi.org/10.3390/sym15111985