
Asymmetric Flow Phenomena Affecting the Characterization of the Control Plant of an Altitude Test Facility for Aircraft Engines


Abstract
:1. Introduction
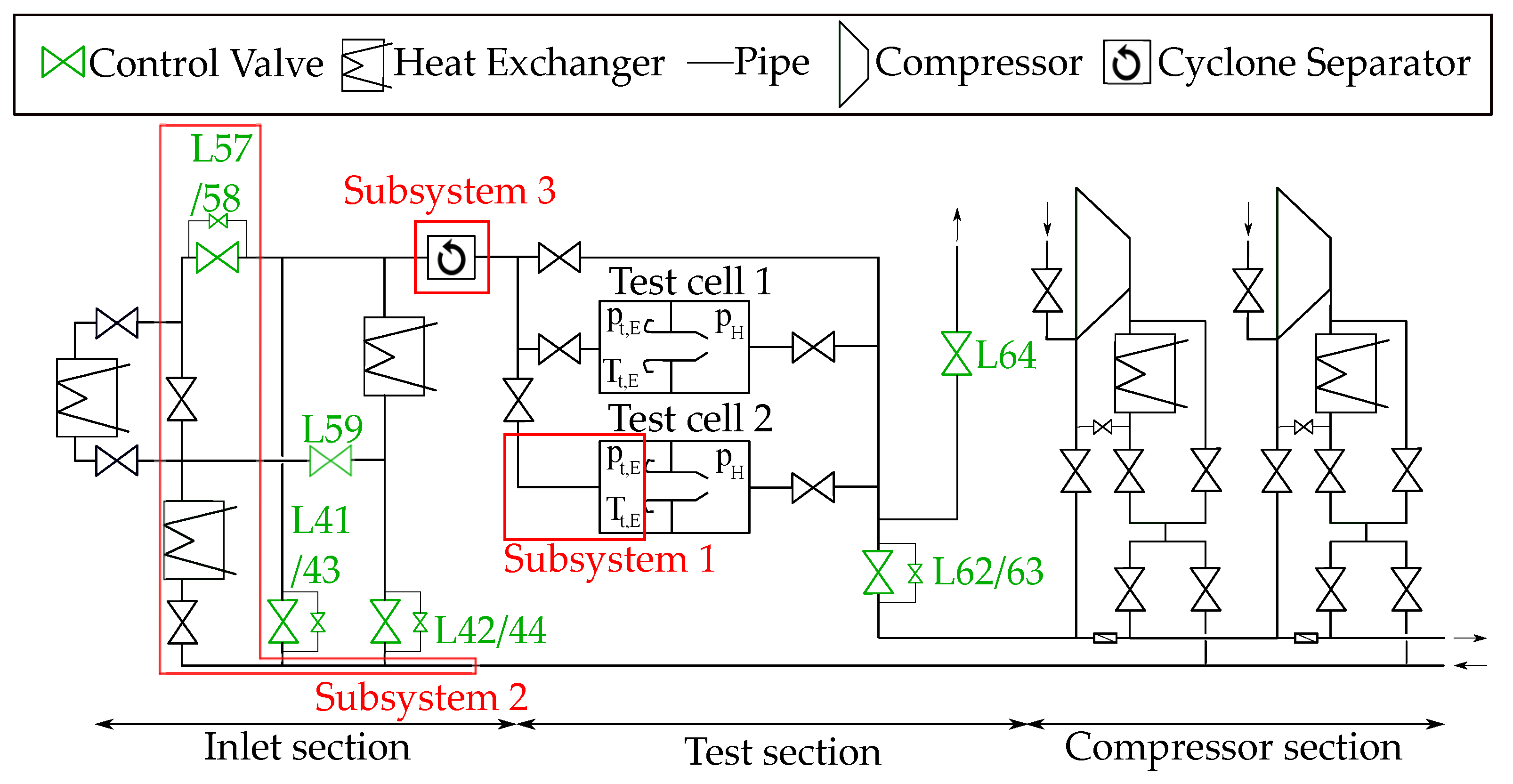
2. Physical Aspects and the Selection of Subsystems for the Stuttgart Altitude Test Facility
Subsystems
3. Evaluation of the Facility Response
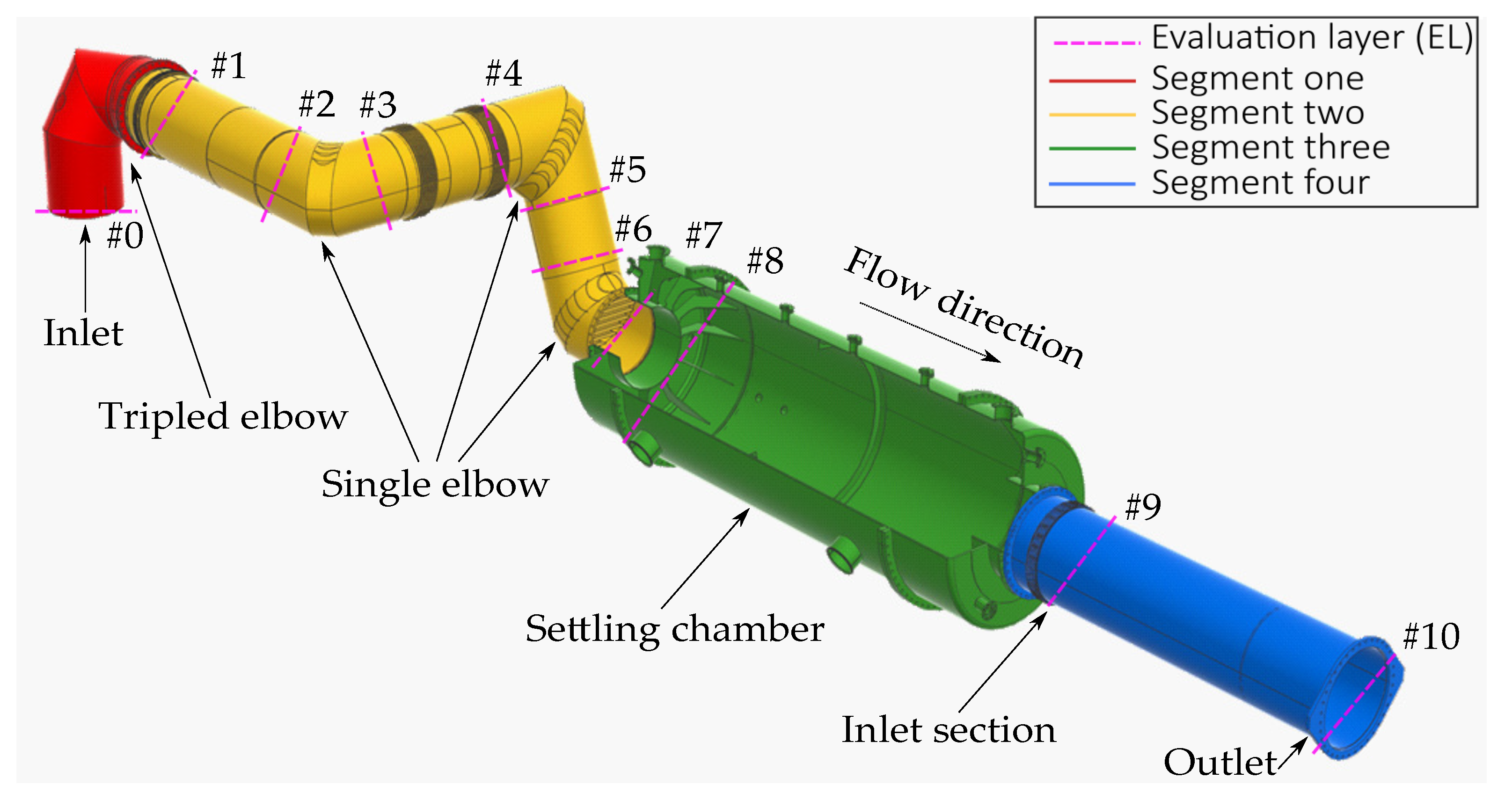
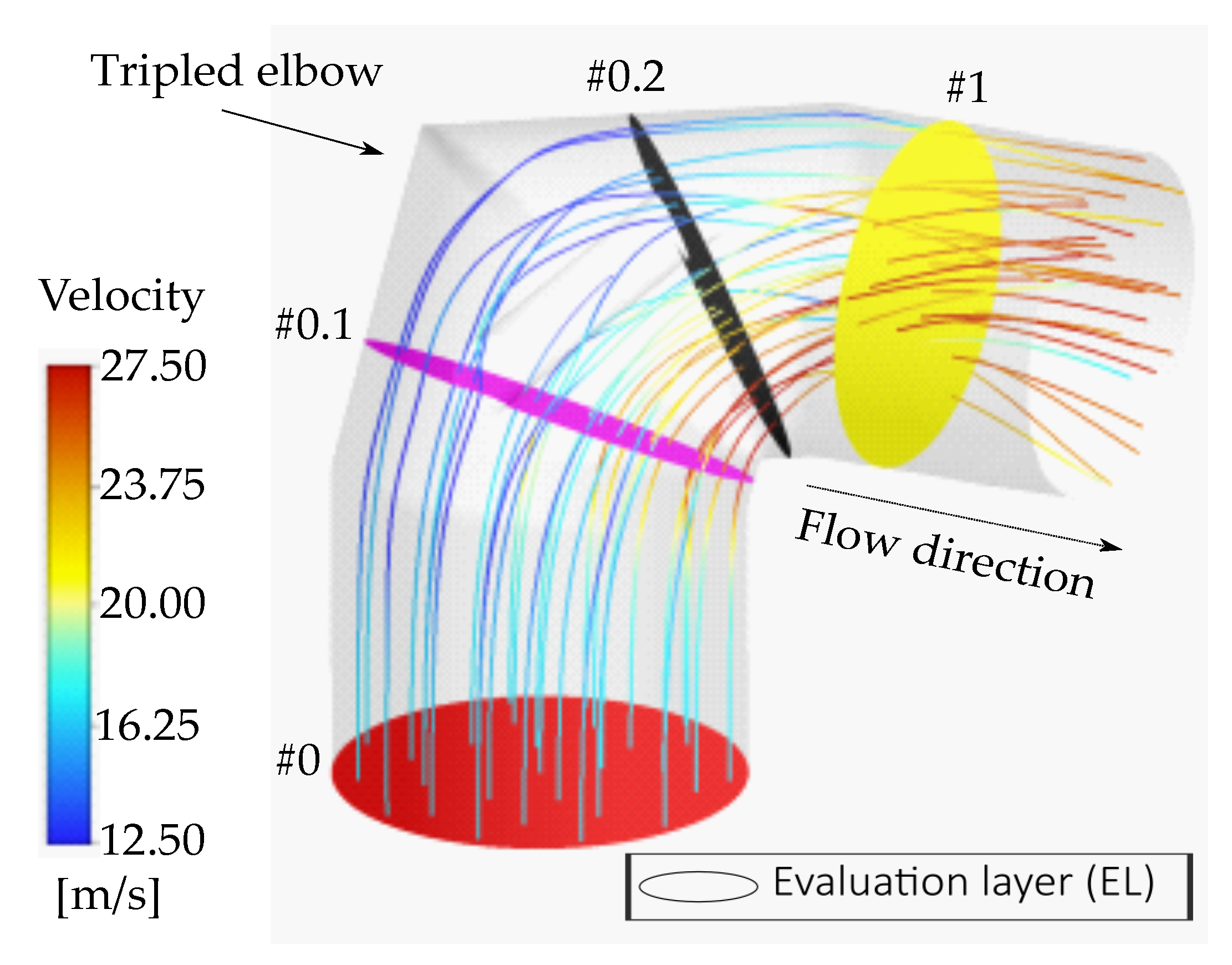
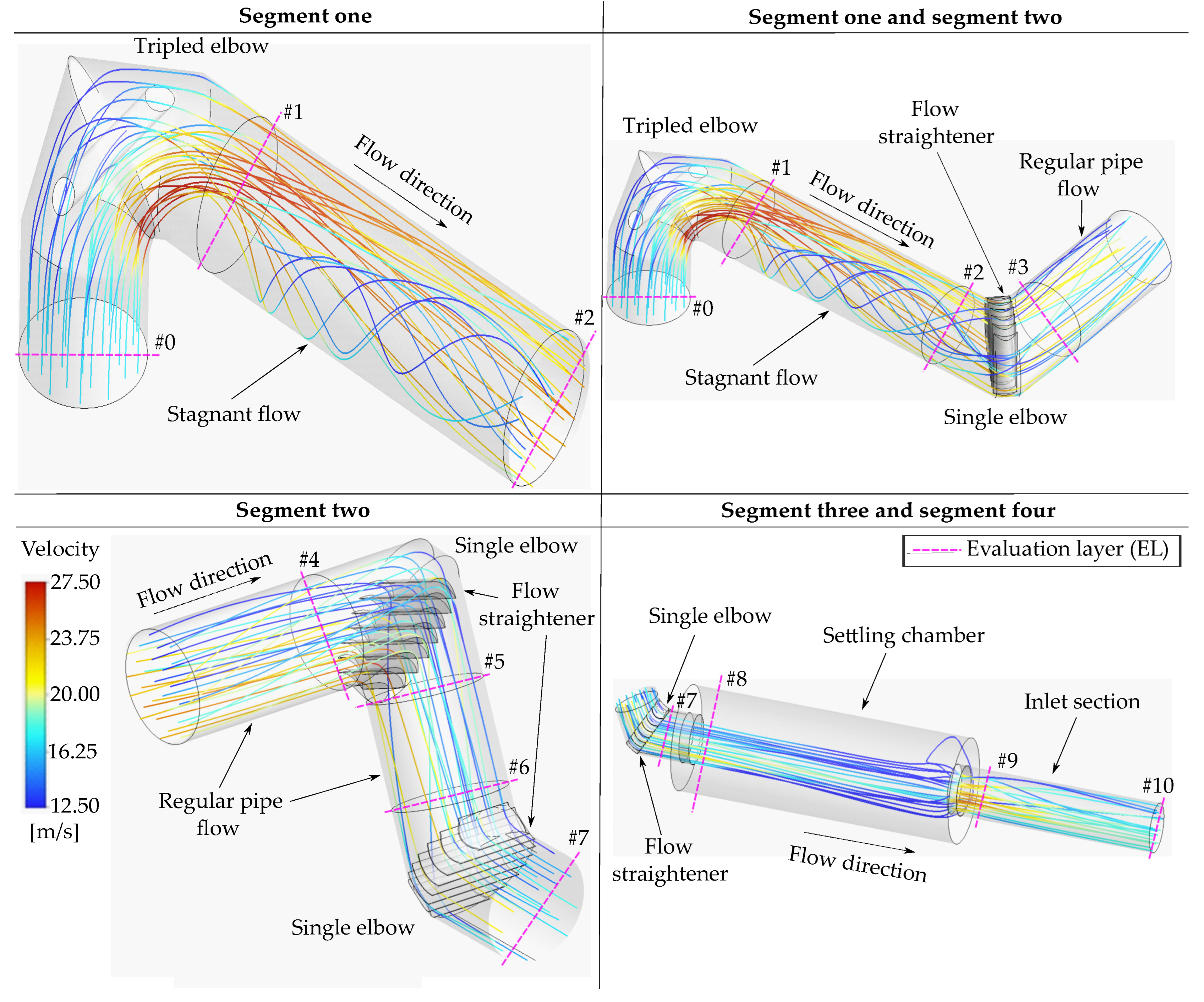
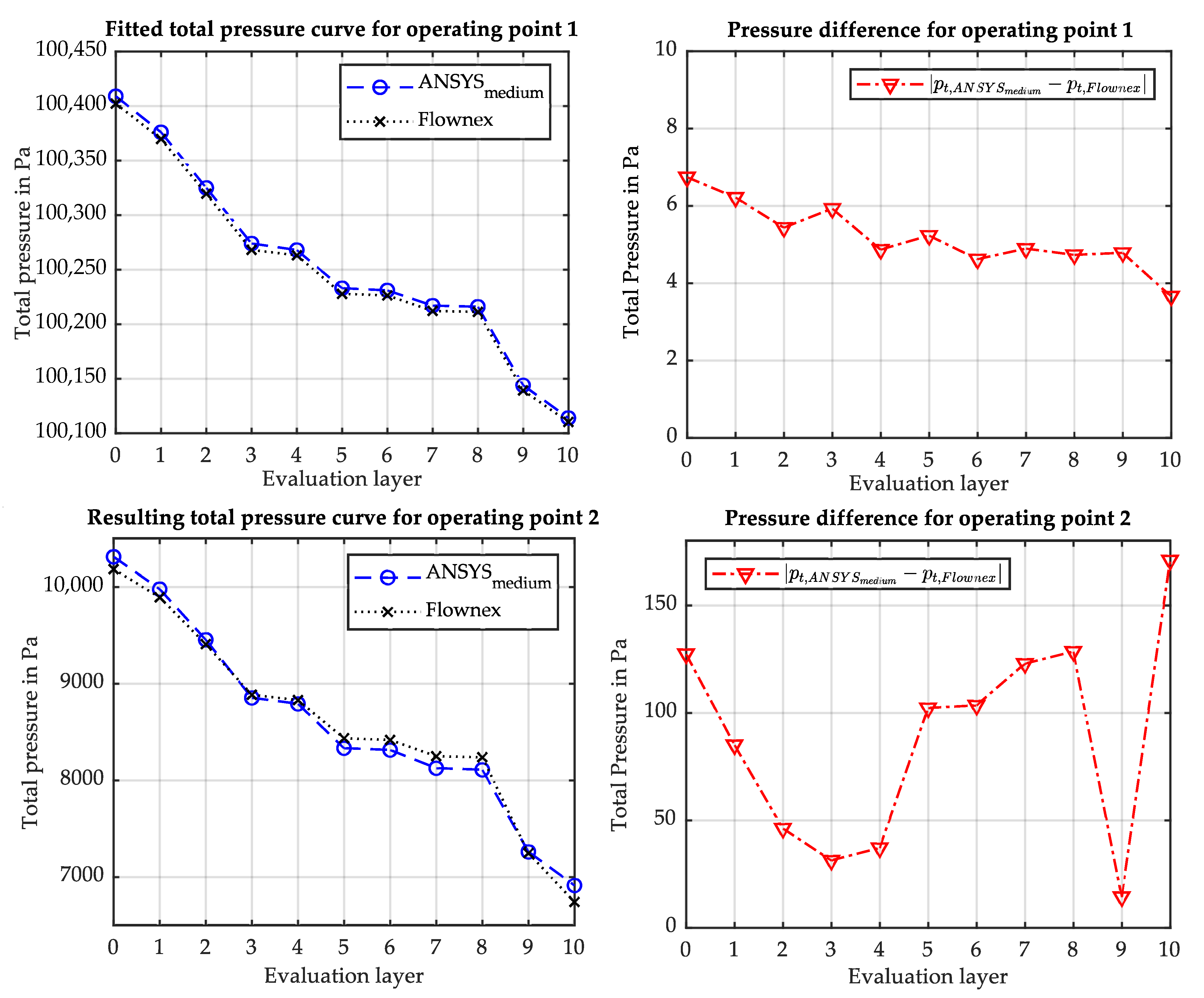
3.1. Subsystem 1—Asymmetric Pipe Flow and Resulting Pressure Losses
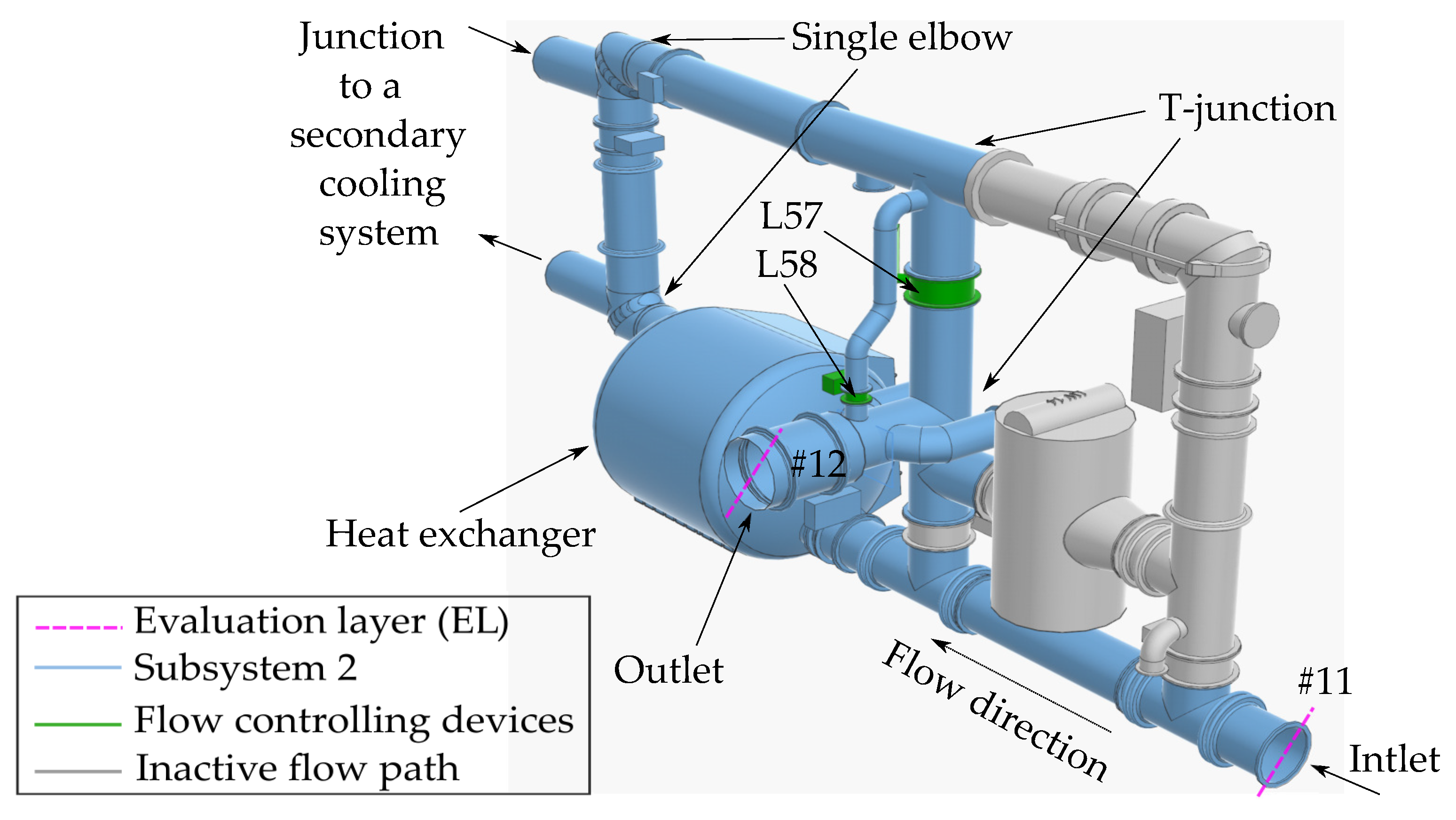
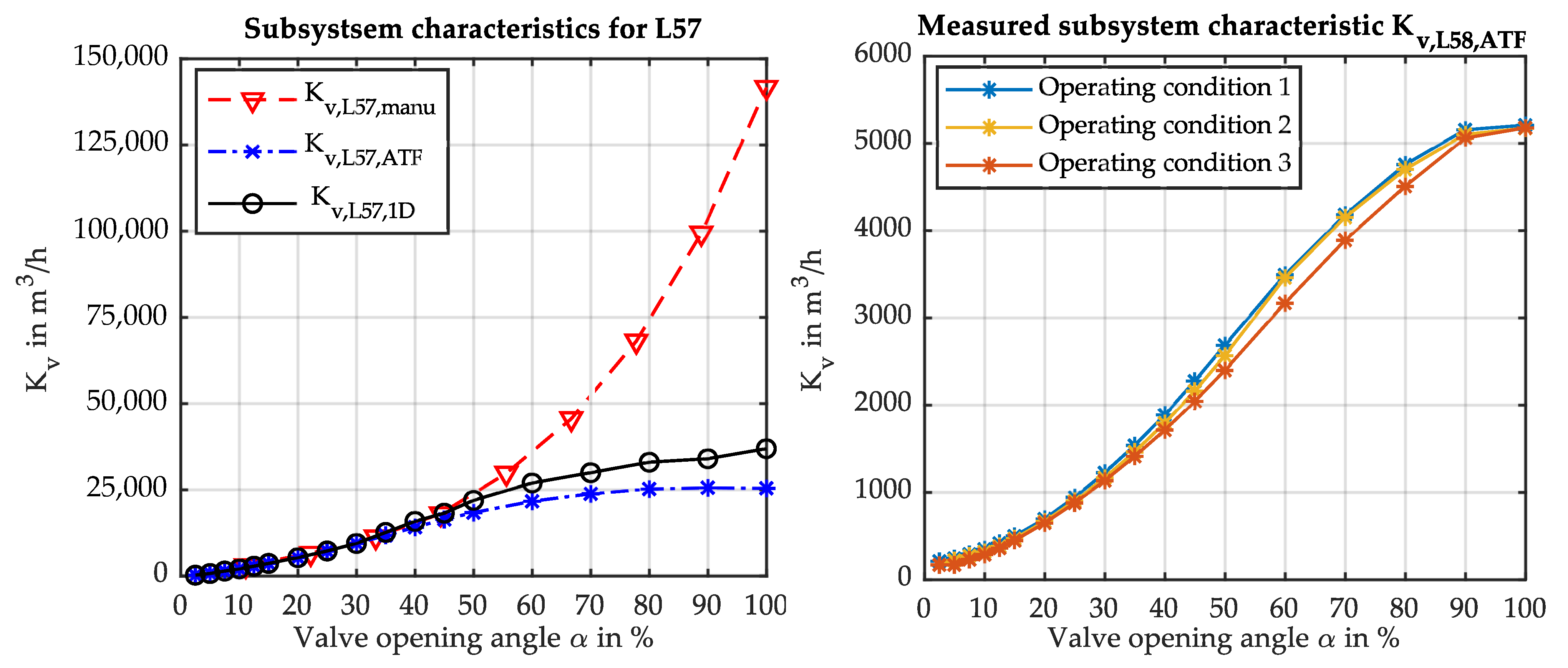
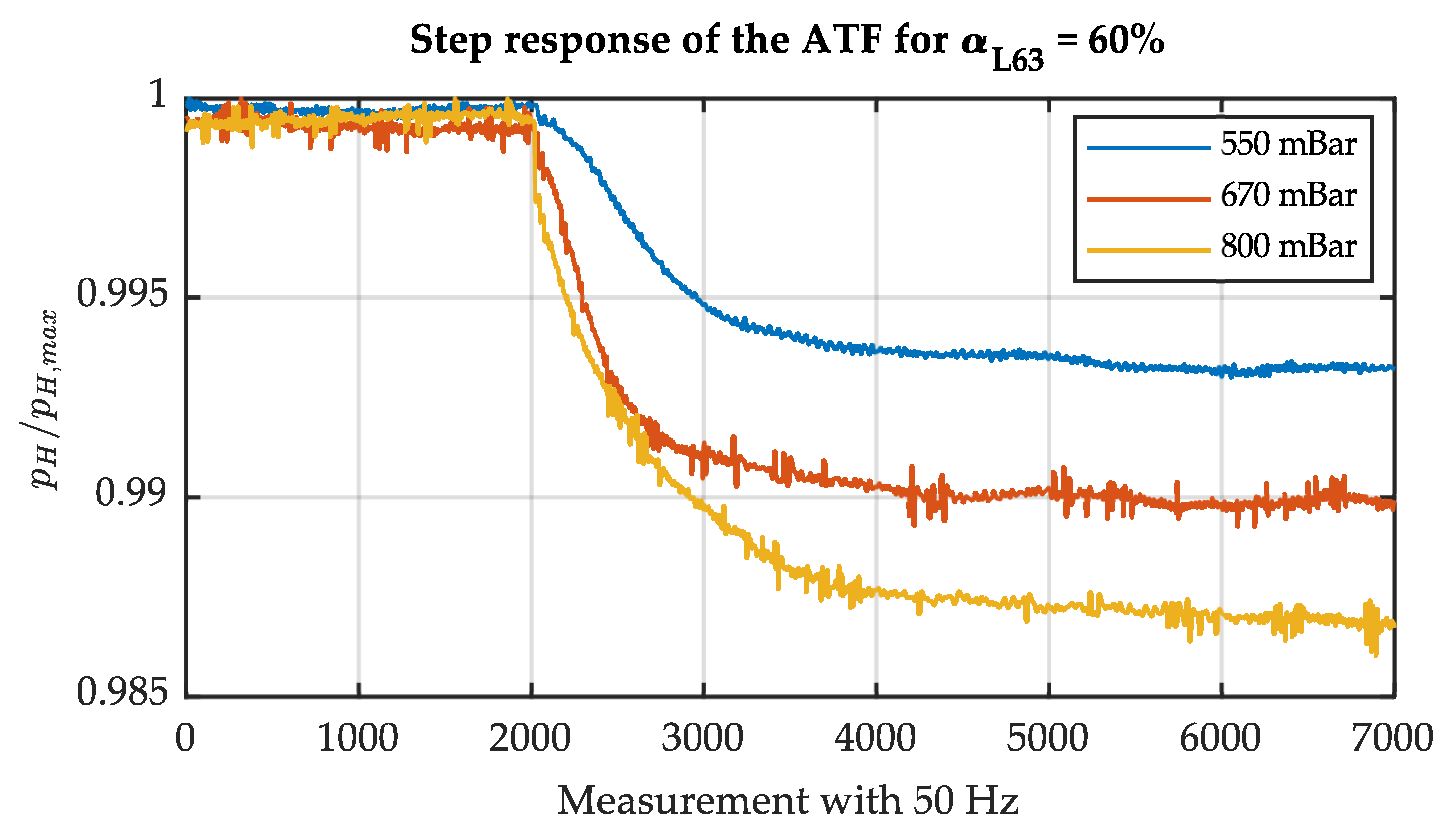
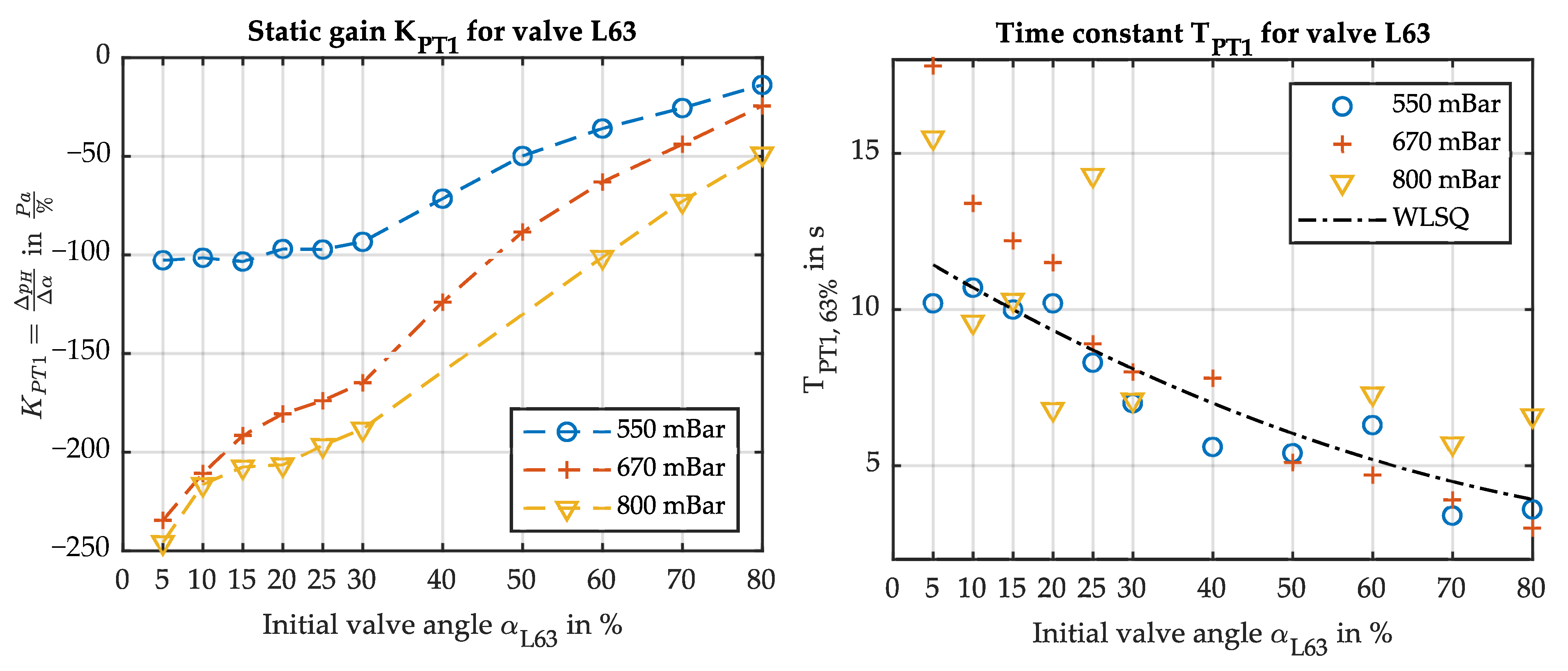
3.2. Subsystem 2—Impact of Asymmetric Flow Phenomena on Flow Control and Subsystem Characteristics
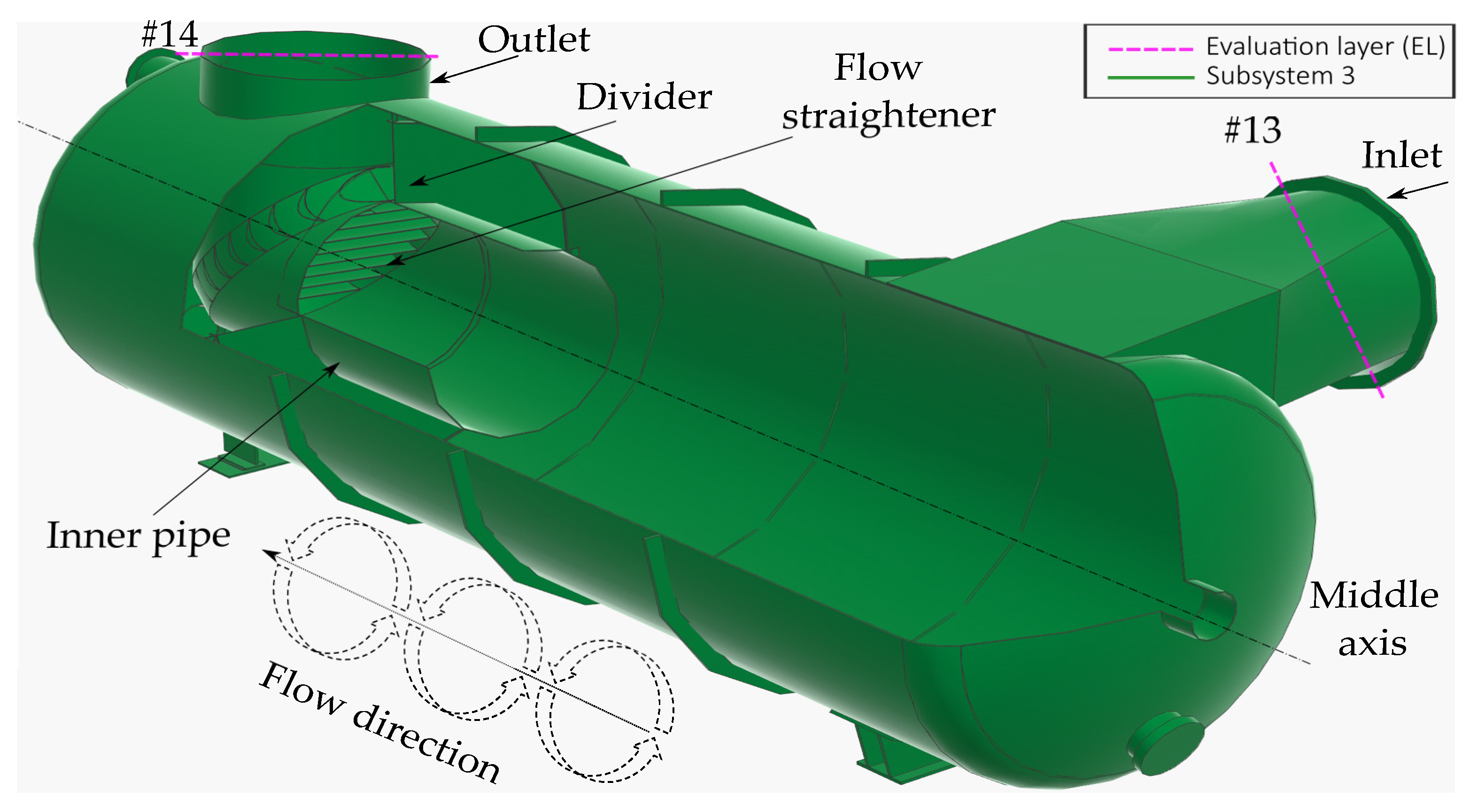
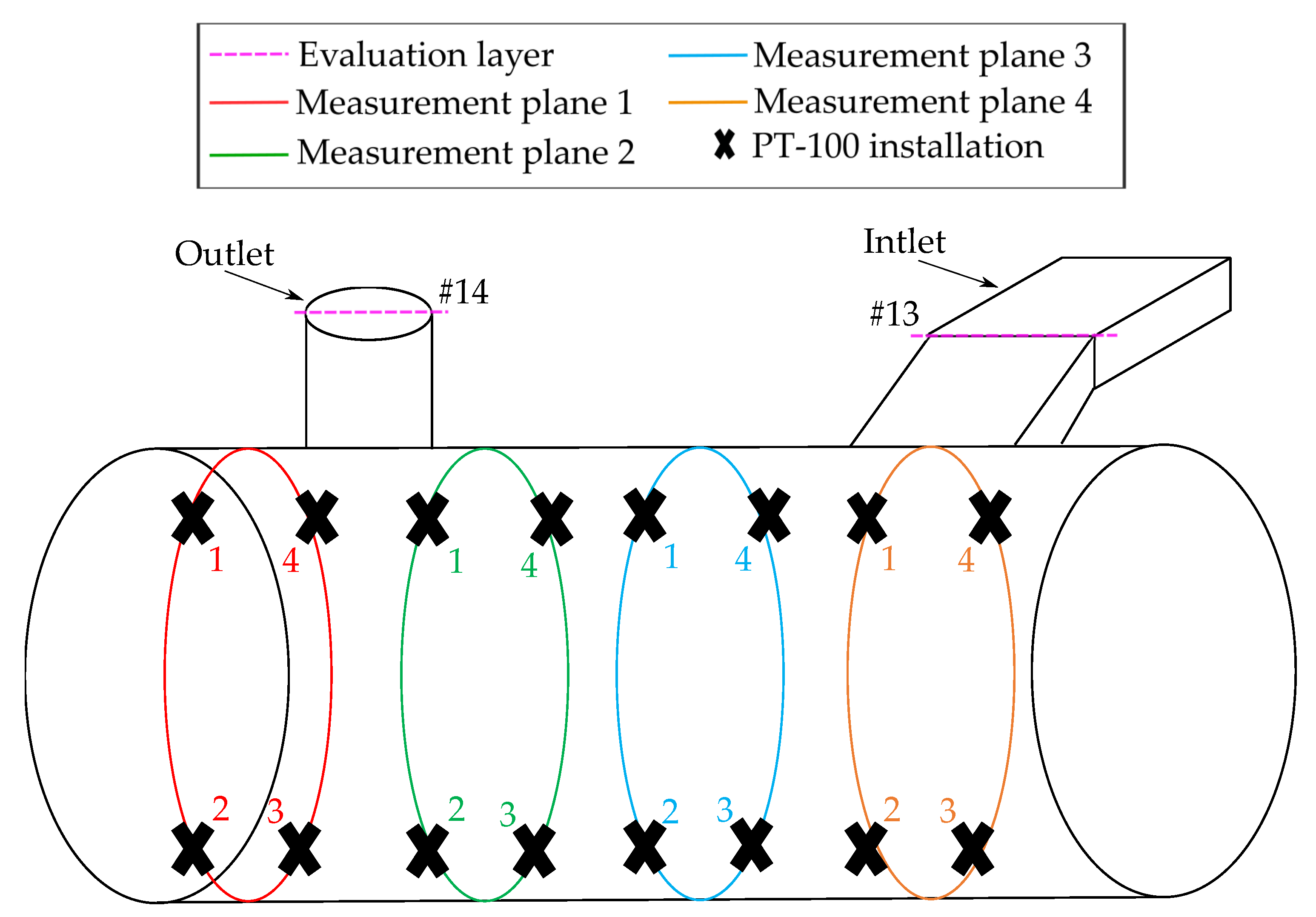
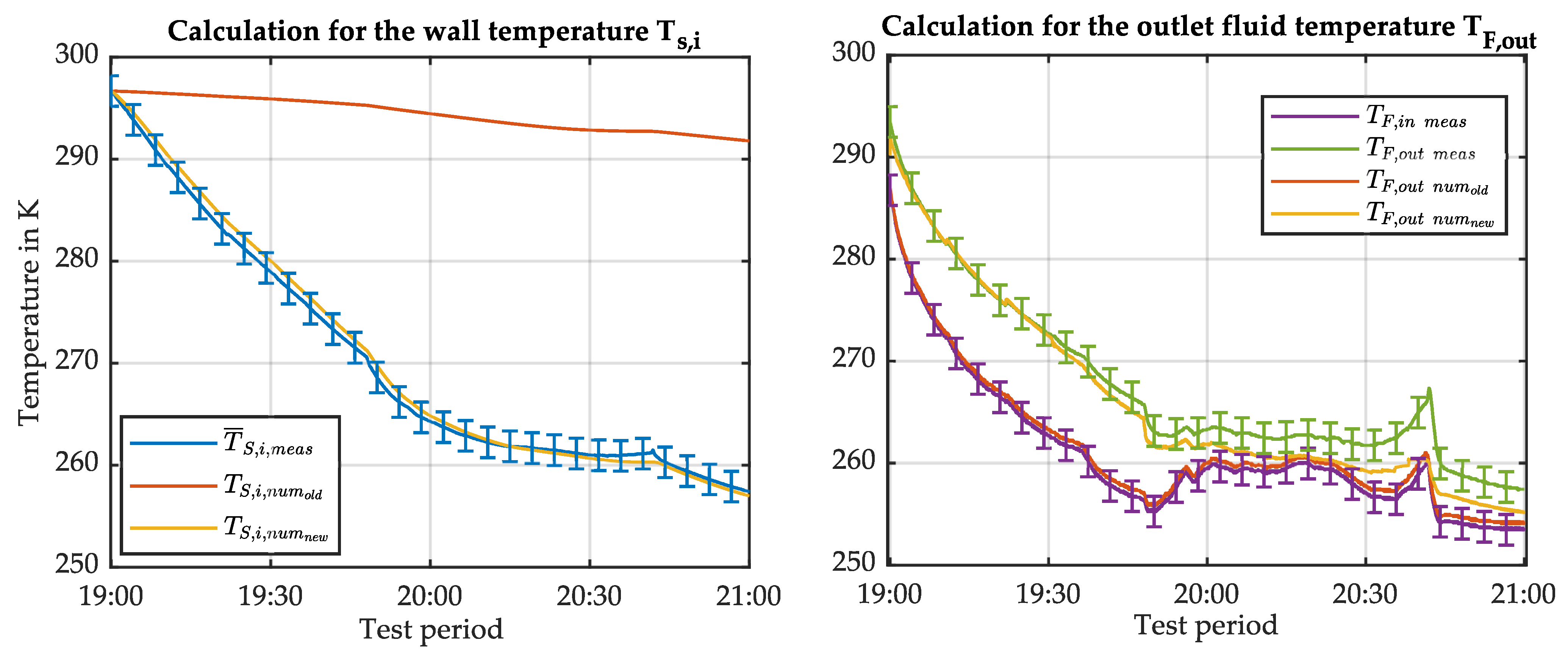
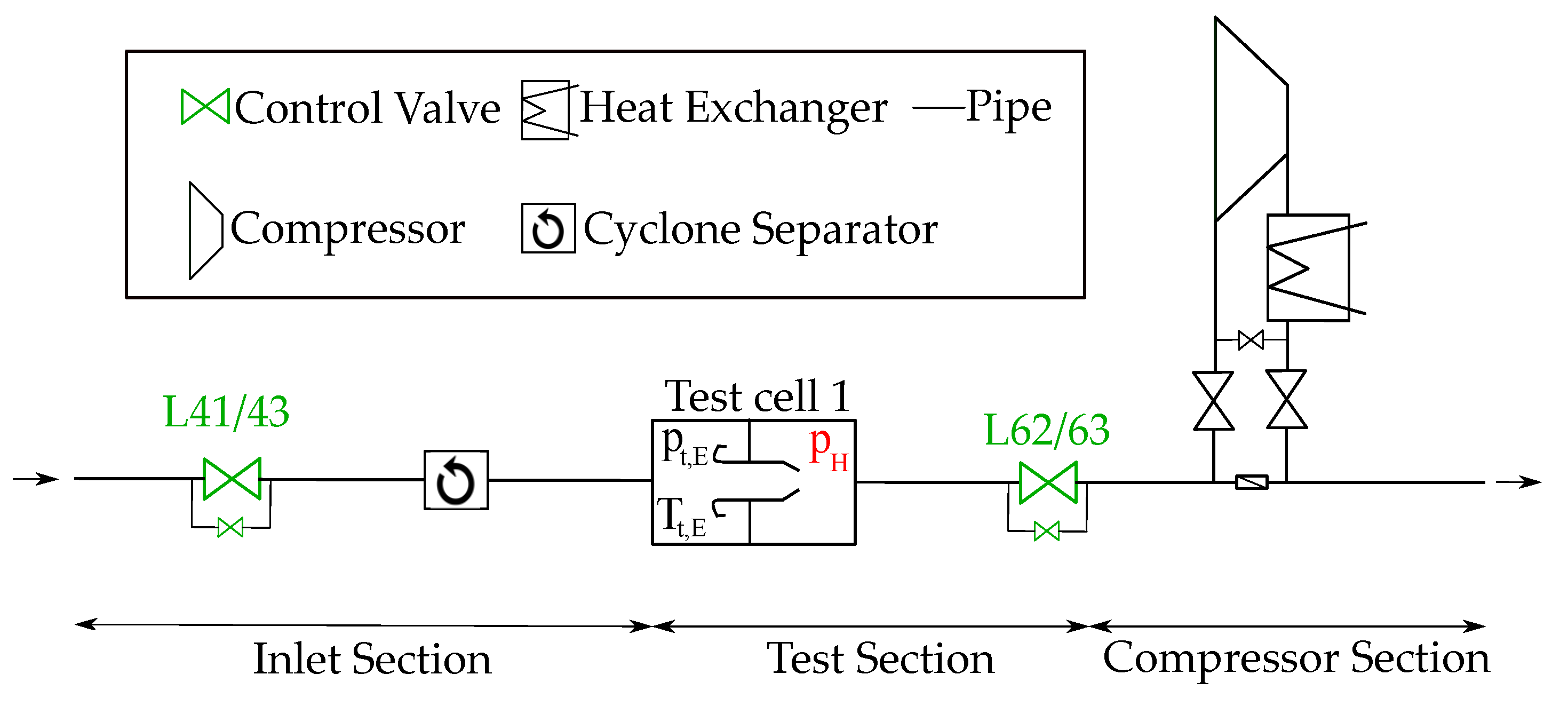
3.3. Subsystem 3—Cyclone Separator and Heat Transfer
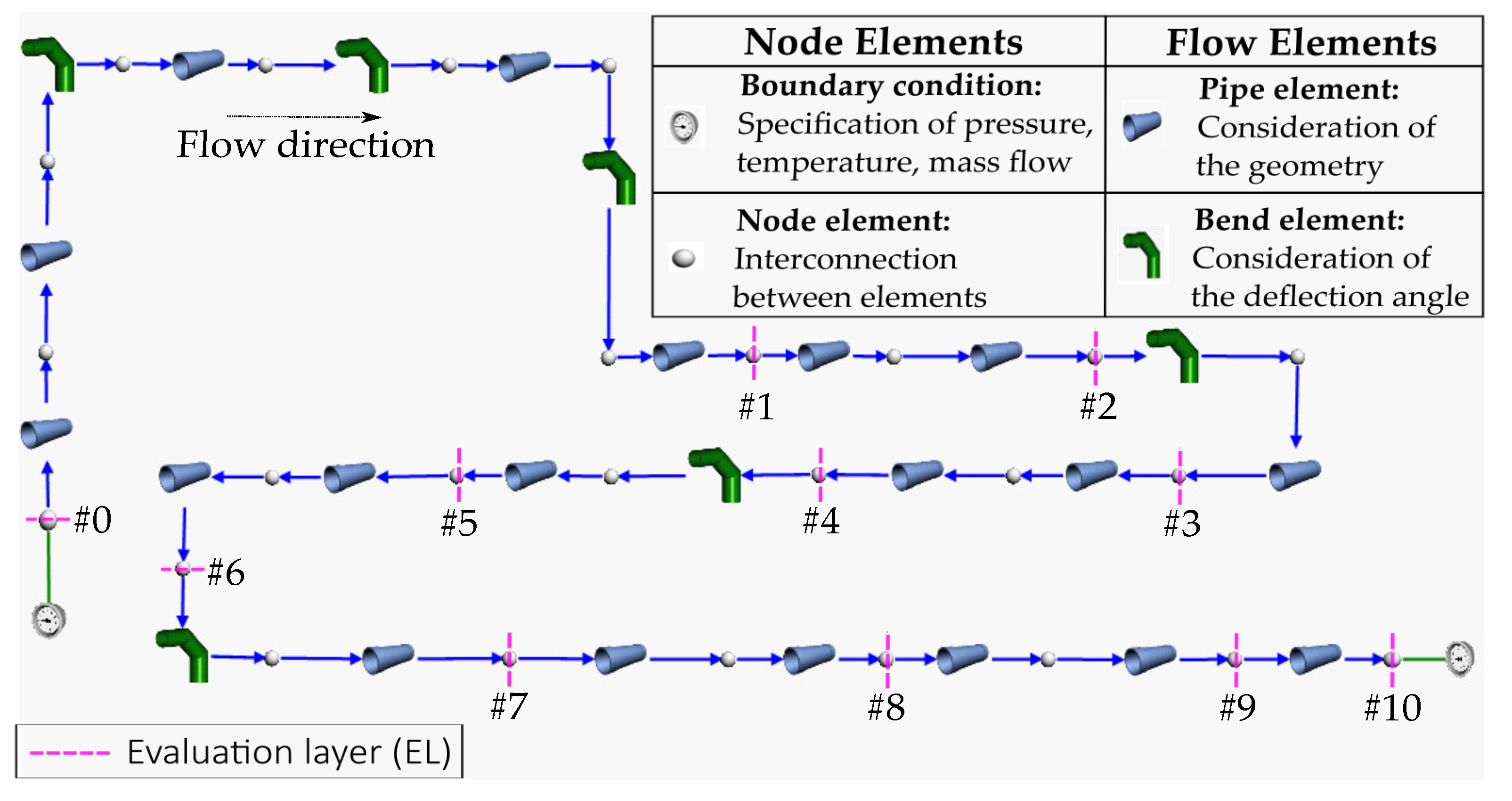
4. System Identification
5. Discussion
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature and Abbreviations
Nomenclature
| Valve opening angle (%) | |
| Heat transfer coefficient () | |
| Dynamic viscosity (Pa s) | |
| Thermal conductivity () | |
| Density () | |
| Heaviside-function (%) | |
| Thermal time constant (s) | |
| A | Wetted surface area (m) |
| c | Heat capacity () |
| C | Geometric constant (-) |
| D | Diameter (m) |
| h | Transfer function () |
| Subsystem volume flow coefficient () | |
| M | Molar mass () |
| m | Mass (kg) |
| Numerical constant ( | |
| Nusselt number (-) | |
| Mass flow () | |
| Prandtl number (-) | |
| p | Pressure (Pa) |
| Q | Volume flow () |
| Heat transfer () | |
| Specific gas constant () | |
| Reynolds number (-) | |
| t | Time (s) |
| T | Temperature (K) |
| Turbulence intensity (%) | |
| x | Pressure ratio (-) |
| Y | Numerical value (-) |
| Subscripts/Superscripts | |
| 0 | Ambient |
| Data from a 1D simulation | |
| a | Outer surface |
| Data measured at the ATF | |
| E | Test cell inlet |
| F | Fluid |
| H | Test cell outlet |
| i | Inner surface |
| Inlet | |
| Data from a manufacturer | |
| Measured data | |
| Numerical data | |
| Outlet | |
| s | Structure |
| t | Stagnation |
Abbreviations
| AEDC | Arnold Engineering Development Center |
| ATF | Altitude test facility |
| EASA | European Union Aviation Safety Agency |
| EL | Evaluation layer |
| FAA | Federal Aviation Administration |
| GCI | Grid convergence index |
| ILA | Institute of Aircraft Propulsion Systems |
| MDPI | Multidisciplinary Digital Publishing Institute |
| PID | Proportional–integral–derivative |
| RANS | Reynolds-averaged Navier–Stokes |
| SCADA | Supervisory control and data acquisition |
| TBCC | Turbine-based combined cycle |
| WLSQ | Weighted least square |
References
- EASA CS-E Certification Specification for Engines. Available online: https://www.easa.europa.eu/sites/default/files/dfu/agency-measures-docs-certification-specifications-CS-E-CS-E_Amendment-2.pdf (accessed on 31 August 2023).
- FAA AC 33-2C: General Type Certification Guidelines for Turbine Engines. Available online: https://www.faa.gov/documentLibrary/media/Advisory_Circular/AC_33-2C.pdf (accessed on 31 August 2023).
- Köcke, S. Simulation eines Höhenprüfstands zur Untersuchung der Verdichter-Pumpverhütungsregelung. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2010. [Google Scholar]
- Roberts, J.; Beyerly, W.; Mason, M.; Glazier, J.; Wiley, R. PW4084 Engine Testing in Altitude & Sea Level Test Facilities. SAE Trans. 1994, 103, 2116–2130. [Google Scholar]
- Adolf, M. More Energy Efficiency through Process Automation; ZVEI-Zentralverband Elektrotechnik und Elektronikindustrie eV: Frankfurt am Main, Germany, 2012; pp. 1–16. Available online: https://www.zvei.org/fileadmin/user_upload/Presse_und_Medien/Publikationen/2013/januar/More_energy_efficiency_through_process_automation/ZVEI_Energienutzung-englisch.pdf (accessed on 31 August 2023).
- Luppold, R.H.; Meisner, R.; Norton, J.M. Design and Evaluation of an Auto-Tuning Control System for an Altitude Test Facility. In Proceedings of the ASME 1999 International Gas Turbine and Aeroengine Congress and Exhibition, Manufacturing Materials and Metallurgy; Ceramics; Structures and Dynamics; Controls, Diagnostics and Instrumentation, Indianapolis, IN, USA, 7–10 June 1999; Volume 4. [Google Scholar] [CrossRef]
- Karpuk, S.; Elham, A. Comparative study of hydrogen and kerosene commercial aircraft with advanced airframe and propulsion technologies for more sustainable aviation. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2023, 237, 2074–2091. [Google Scholar] [CrossRef]
- Schiewe, C.; Neuburger, N.; Staudacher, S. How Future Propulsion Systems Influence Future Component Testing: Latest Results from Stuttgart Univerity’s Altitude Test Facility. In Proceedings of the Global Power and Propulsion Society Technical Conference, Zurich, Switzerland, 16–17 January 2019. [Google Scholar] [CrossRef]
- Richter, H. Advanced Control of Turbofan Engines; Springer Science + Business Media, LLC: New York, NY, USA, 2012; pp. 51–226. ISBN 978-1-4614-1170-3. [Google Scholar]
- Bierkamp, J.; Köcke, S.; Staudacher, S.; Fiola, R. Influence of ATF Dynamics and Controls on Jet Engine Performance. In Proceedings of the ASME Turbo Expo 2007: Power for Land, Sea, and Air. Volume 1: Turbo Expo 2007, Montreal, QC, Canada, 14–17 May 2007; pp. 105–113. [Google Scholar] [CrossRef]
- Schiewe, C.; Staudacher, S.; Elter, M. Automation of Stuttgart Universitys multi-functional Altitude Test Facility. In Proceedings of the 24th International Symposium on Air Breathing Engines (ISABE), Canberra, Australia, 22–27 September 2019; pp. 733–742. [Google Scholar]
- Lunze, J. Regelungstechnik 1, 12th ed.; Springer: Berlin, Germany, 2020; pp. 41–233. ISBN 978-3-662-60745-9. [Google Scholar]
- Montgomery, P.; Burdette, R.; Krupp, B. A real-time turbine engine facility model and simulation for test operations modernization and integration. In Proceedings of the ASME Turbo Expo 2000: Power for Land, Sea, and Air. Volume 1: Aircraft Engine; Marine; Turbomachinery; Microturbines and Small Turbomachinery, Munich, Germany, 8–11 May 2000. [Google Scholar] [CrossRef]
- Montgomery, P.; Burdette, R.; Wilhite, L.; Salita, S. Modernization of a Turbine Engine Test Facility Utilizing a Real-Time Facility Model and Simulation. In Proceedings of the ASME Turbo Expo 2001: Power for Land, Sea, and Air. Volume 1: Aircraft Engine; Marine; Turbomachinery; Microturbines and Small Turbomachinery, New Orleans, LA, USA, 4–7 June 2001. [Google Scholar] [CrossRef]
- Montgomery, P.; Burdette, R.; Klepper, J.; Milhoan, A. Evolution of a Turbine Engine Test Facility to Meet the Test Needs of Future Aircraft Systems. In Proceedings of the ASME Turbo Expo 2002: Power for Land, Sea, and Air. Volume 1: Turbo Expo 2002, Amsterdam, The Netherlands, 3–6 June 2002; pp. 119–128. [Google Scholar] [CrossRef]
- Davis, M.; Montgomery, P. A Flight Simulation Vision for Aeropropulsion Altitude Ground Test Facilities. J. Eng. Gas Turbines Power 2005, 127, 8–17. [Google Scholar] [CrossRef]
- Sheeley, J.; Sells, D.; Bates, R.; Bates, L. Experiences with Coupling Facility Control Systems with Control Volume Facility Models. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 5–8 January 2004; pp. 932–941. [Google Scholar] [CrossRef]
- Köcke, S.; Bierkamp, J.; Staudacher, S. Simulation des Gesamtsystems bestehend aus Höhenprüfstand und Triebwerk. In Proceedings of the Deutscher Luft- und Raumfahrtkongress, Braunschweig, Germany, 6–9 November 2009. [Google Scholar]
- Bolk, S.; Staudacher, S. Entwurf und Identifikation eines modularen Modells des Höhenprüfstandes der Universität Stuttgart. In Proceedings of the Deutscher Luft- und Raumfahrtkongress, Darmstadt, Germany, 23–25 September 2008. [Google Scholar]
- Bolk, S. Entwurf einer Mehrgrößenregelung zur Sollwertfolge am Höhenprüfstand der Universität Stuttgart. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2011. [Google Scholar]
- Boylston, B.; Milhoan, A. Upgrades to the Aerodynamic and Propulsion Test Unit Facility Control System and Simulator in Support of the Medium Scale Critical Components Direct Connect Test Program. In Proceedings of the 19th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar] [CrossRef]
- Weisser, M.; Bolk, S.; Staudacher, S. Hardware-In-The-Loop-Simulation of a Feedforward Multivariable Controller for the Altitude Test Facility at the University of Stuttgart. In Proceedings of the Deutscher Luft- und Raumfahrtkongress, Stuttgart, Germany, 10–12 September 2013. [Google Scholar]
- Borairi, M.; Van Every, D.H. Design and Commissioning of a Multivariable Control System for a Gas Turbine Engine Test Facility. In Proceedings of the 25th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, San Francisco, CA, USA, 5–8 June 2006. [Google Scholar] [CrossRef]
- Miao, K.; Wang, X.; Zhu, M.; Zhang, S.; Dan, Z.; Liu, J.; Yang, S.; Pei, X.; Wang, X.; Zhang, L. A Multi-Cavity Iterative Modeling Method for the Exhaust Systems of Altitude Ground Test Facilities. Symmetry 2022, 14, 1399. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Pei, X.; Zhu, M.; Zhang, L.; Yang, S.; Zhang, S. Generic Modeling Method of Quasi-One-Dimensional Flow for Aeropropulsion System Test Facility. Symmetry 2022, 14, 1161. [Google Scholar] [CrossRef]
- Pei, X.; Liu, J.; Wang, X.; Zhu, M.; Zhang, L.; Dan, Z. Quasi-One-Dimensional Flow Modeling for Flight Environment Simulation System of Altitude Ground Test Facilities. Processes 2022, 10, 377. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X. An Integral Type µ Synthesis Method for Temperature and Pressure Control of Flight Environment Simulation Volume. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition. Volume 6: Ceramics; Controls, Diagnostics and Instrumentation; Education; Manufacturing Materials and Metallurgy, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Yang, S.; Chen, H.; Miao, K.; Gu, N. Two Degree-of-Freedom µ Synthesis Control With Kalman Filter for Flight Environment Simulation Volume With Sensors Uncertainty. In Proceedings of the ASME Turbo Expo 2019: Turbomachinery Technical Conference and Exposition. Volume 6: Ceramics; Controls, Diagnostics, and Instrumentation; Education; Manufacturing Materials and Metallurgy, Phoenix, AZ, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Pei, X.; Zhang, S.; Dan, Z.; Gu, N.; Yang, S.; Miao, K.; Chen, Z.; Liu, J. Modified robust optimal adaptive control for flight environment simulation system with heat transfer uncertainty. Chin. J. Aeronaut. 2021, 34, 420–431. [Google Scholar] [CrossRef]
- Zhang, S.; Dan, Z.; Qian, Q.; Guo, Y.; Zhang, J. Nonlinear PID Pressure Control Based on Extremum Seeking. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 2351–2356. [Google Scholar] [CrossRef]
- Li, J.; Wang, H.; Lun, Y.; Qian, Q.; Wu, T. Air Exhaust Environment Simulation of Altitude Test Facility Control Based on Model-Assisted Active Disturbance Rejection Control. In Proceedings of the 2022 International Conference on Autonomous Unmanned Systems (ICAUS 2022), Xi’an, China, 23–25 September 2022; Springer: Singapore, 2023; pp. 1025–1034. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Dan, Z.; Zhang, S.; Pei, X. Two freedom linear parameter varying µ synthesis control for flight environment testbed. Chin. J. Aeronaut. 2019, 32, 1204–1214. [Google Scholar] [CrossRef]
- Schiewe, C. Automatisierte Betriebspunktoptimierung des Stuttgarter Höhenprüfstandes in Hinblick auf die Energieeffizienz. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2023. [Google Scholar]
- Flownex Homepage. Available online: https://flownex.com/ (accessed on 1 September 2023).
- Flownex Library Manual; Flownex Simulation Environment: Potchefstroom, South Africa, 2020; pp. 496–503.
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Roache, P.J. Perspective: A Method for Uniform Reporting of Grid Refinement Studies. J. Fluids Eng. 1994, 116, 405–413. [Google Scholar] [CrossRef]
- Sharify, E.M.; Saito, H.; Harasawa, H.; Takahashi, S.; Arai, N. Experimental and Numerical Study of Blockage Effects on Flow Characteristics around a Square-Section Cylinder. J. Jpn. Soc. Exp. Mech. 2013, 13, 7–12. [Google Scholar] [CrossRef]
- Lu, T.; Attinger, D.; Liu, S.M. Large-eddy simulations of velocity and temperature fluctuations in hot and cold fluids mixing in a tee junction with an upstream elbow main pipe. Nucl. Eng. Des. 2013, 263, 32–41. [Google Scholar] [CrossRef]
- Crawford, N.; Cunningham, G.; Spedding, P. Prediction of pressure drop for turbulent fluid flow in 90∘ bends. Proc. Inst. Mech. Eng. Part E: J. Process Mech. Eng. 2003, 217, 153–155. [Google Scholar] [CrossRef]
- Crawford, N. Pressure Losses at Bends and Junctions. Ph.D. Thesis, Faculty of Engineering, School of Mechanical and Manufacturing Engineering, Queen’s University, Belfast, UK, 2005. [Google Scholar]
- Crawford, N.; Spence, S.; Simpson, A.; Cunningham, G. A numerical investigation of the flow structures and losses for turbulent flow in 90∘ elbow bends. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2009, 223, 27–44. [Google Scholar] [CrossRef]
- Weigand, B. Analytische Lösungsmethoden für Wärme- und Stoffübertragungsprobleme; Manuscript for the Lecture; Institute of Aerospace Thermodynamics (ITLR), University of Stuttgart: Stuttgart, Germany, 2002. [Google Scholar]
- VDI-Gesellschaft Verfahrenstechnik und Chemieingenieurwesen Hrsg. VDI-Wärmeatlas, 11th ed.; Springer: Berlin, Germany, 2013; Chapters C, D and N3; ISBN 978-3-642-19980-6. [Google Scholar]
- Baehr, H.D.; Stephan, K. Wärme- und Stoffübertragung, 7th ed.; Springer: Berlin, Germany, 2010; pp. 299–471. ISBN 978-3-642-05500-3. [Google Scholar]
- Incropera, F.P.; DeWitt, D.P.; Bergmann, T.L.; Lavine, A.S. Fundamentals of Heat and Mass Transfer, 6th ed.; John Wiley & Sons: New York, NY, USA, 1996; pp. 347–531. ISBN 978-0471457282. [Google Scholar]
- Weisser, M. Grenzen des manuellen und geregelten Betriebs am Höhenprüfstand der Universität Stuttgart. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2015. [Google Scholar]
- Bernhard, F. Handbuch der Technischen Temperaturmessung, 2nd ed.; Springer: Berlin, Germany, 2014; ISBN 978-3-642-24505-3. [Google Scholar]
- Gaddis, E.S. Wärmeübertragung und Leistungsaufnahme in Rührkesseln; VDI-Wärmeatlas, 11th ed.; Springer: Berlin, Germany, 2013; pp. 1645–1653. ISBN 978-3-642-19980-6. [Google Scholar]
- Rugh, W.; Jeff, S. Research on gain scheduling. Automatica 2000, 36, 1401–1425. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering, 5th ed.; Prentice Hall: Hoboken, NJ, USA, 2010; ISBN 978-0-13-615673-4. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Point | Inlet Mass Flow | Turbulence Intensity | Area-Averaged Inlet Total Temperature | Area-Averaged Outlet Static Pressure |
|---|---|---|---|---|
| - | ||||
| 1 | 20 | 3% | 455 K | 1 bar |
| 2 | 15 | 3% | 620 K | 0.05 bar |
| Mass Flow | Thermal Time Constant |
|---|---|
| = 1829 s | |
| = 2787 s | |
| = 5763 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roth, C.; Hartmann, J.; Schiewe, C.; Staudacher, S. Asymmetric Flow Phenomena Affecting the Characterization of the Control Plant of an Altitude Test Facility for Aircraft Engines. Symmetry 2023, 15, 1918. https://doi.org/10.3390/sym15101918
Roth C, Hartmann J, Schiewe C, Staudacher S. Asymmetric Flow Phenomena Affecting the Characterization of the Control Plant of an Altitude Test Facility for Aircraft Engines. Symmetry. 2023; 15(10):1918. https://doi.org/10.3390/sym15101918
Chicago/Turabian StyleRoth, Christopher, Jan Hartmann, Constanze Schiewe, and Stephan Staudacher. 2023. "Asymmetric Flow Phenomena Affecting the Characterization of the Control Plant of an Altitude Test Facility for Aircraft Engines" Symmetry 15, no. 10: 1918. https://doi.org/10.3390/sym15101918
APA StyleRoth, C., Hartmann, J., Schiewe, C., & Staudacher, S. (2023). Asymmetric Flow Phenomena Affecting the Characterization of the Control Plant of an Altitude Test Facility for Aircraft Engines. Symmetry, 15(10), 1918. https://doi.org/10.3390/sym15101918