
Distributed Optimal Placement Generators in a Medium Voltage Redial Feeder



Abstract
:1. Introduction
2. Related Work
2.1. Optimisation Techniques
2.1.1. Linear Programming
2.1.2. Nonlinear Programming
2.1.3. Genetic Programming
2.1.4. Dynamic Programming
- A small number of variables.
- The function must be continuous and differentiable.
- Optimum points or values must lie at the boundary.
2.1.5. Integer Programming
2.1.6. Genetic Programming
2.1.7. Particle Swarm Optimisation
2.1.8. Ant Colony Optimisation
2.1.9. Simulated Annealing Algorithm
2.2. Application of Optimisation Techniques to Distributed Generation
2.2.1. Optimal Voltage Regulation
2.2.2. Multiple DGs Placement in a Distribution Network
2.2.3. Mixed-Integer Programming and Genetic Hybrid Algorithm
- Voltage and power flow constraints;
- Cost constraints.
2.2.4. Multiple DG Placement in Primary Distribution Networks for Loss Reduction
2.2.5. Impact of Distributed Generators on Power System Networks
Protection
- Fault Level—Distributed generators cause the fault levels to increase on the networks that are closest to their point of connection [49].
- Reverse Power Flow—The traditional power system was designed to transfer power from generation to load; the introduction of distributed generators to a traditional power system changes the configuration of the network since the power can now flow in either direction. The current protection systems in use are not designed to handle bidirectional power flow and they therefore may fail during reverse power flow [34,49].
- Islanding—When a network where a distributed generator is connected is switched off, the generator may continue to supply the network closest to it; this is called islanding. The existing networks are not designed to operate in islanding due to the unplanned hazards associated with it [49]. According to the South African Grid Code [50], an electricity distributor may decide on whether or not to implement islanding.
Stability
Power Quality
3. Research Methodology
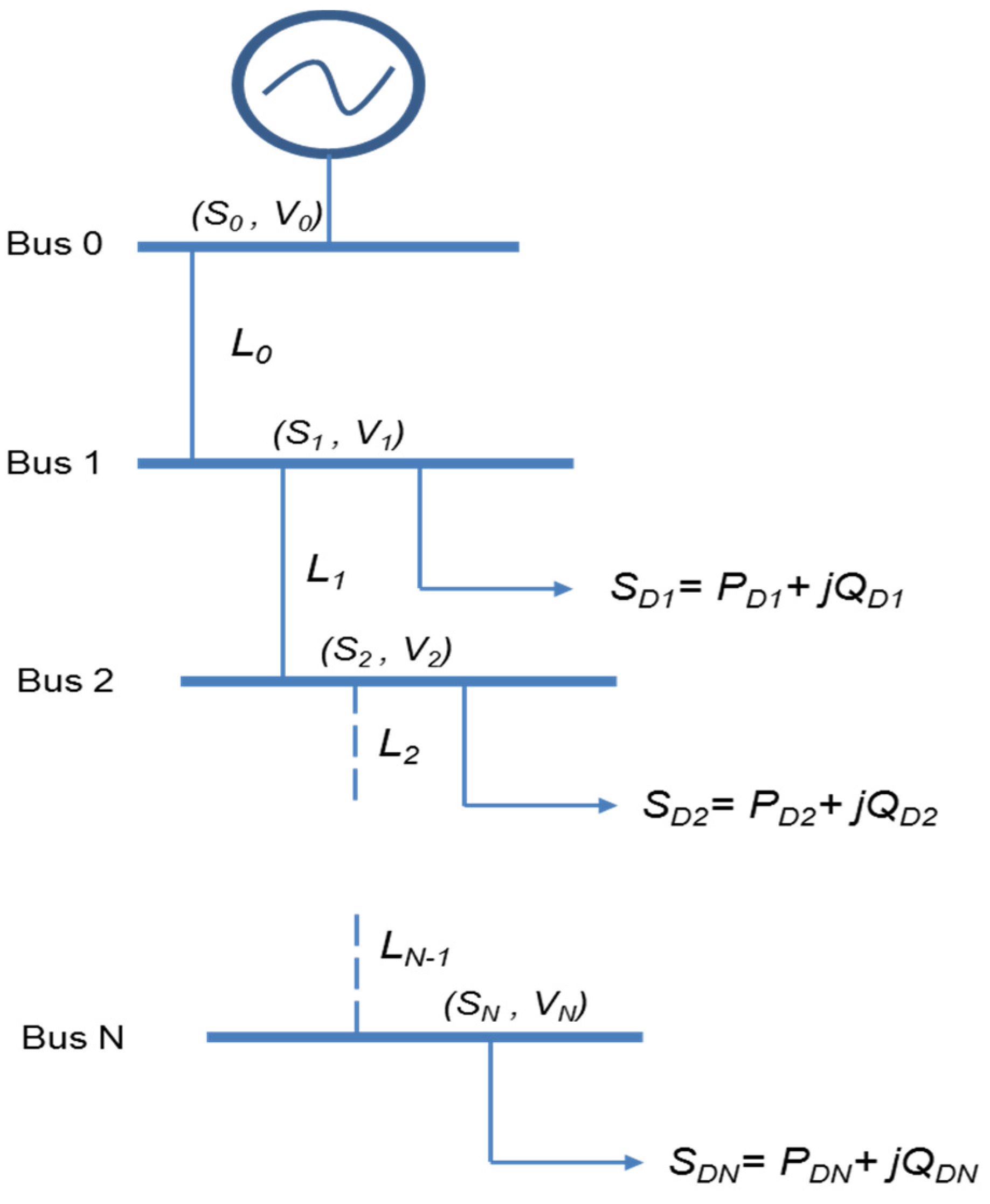
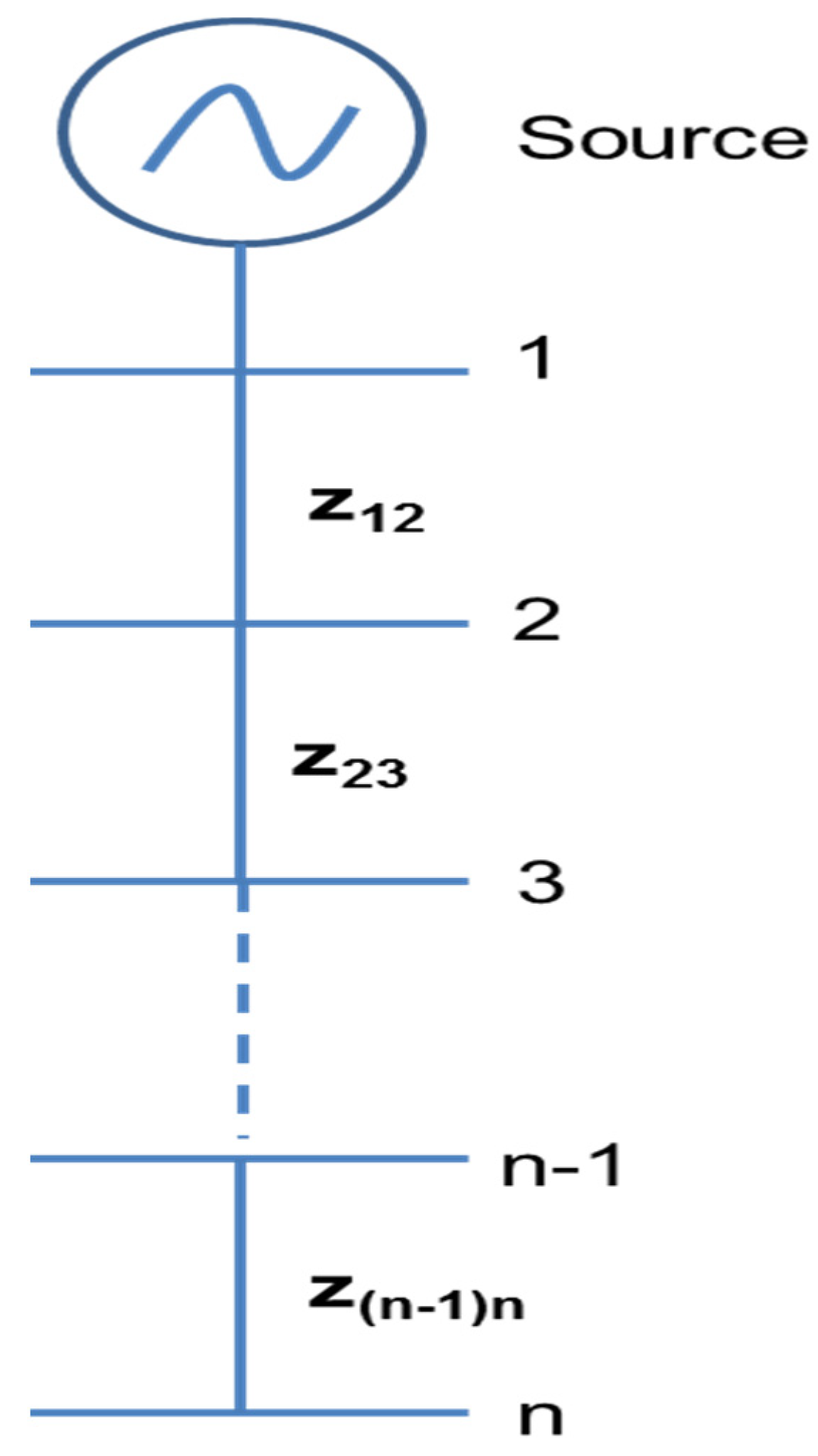
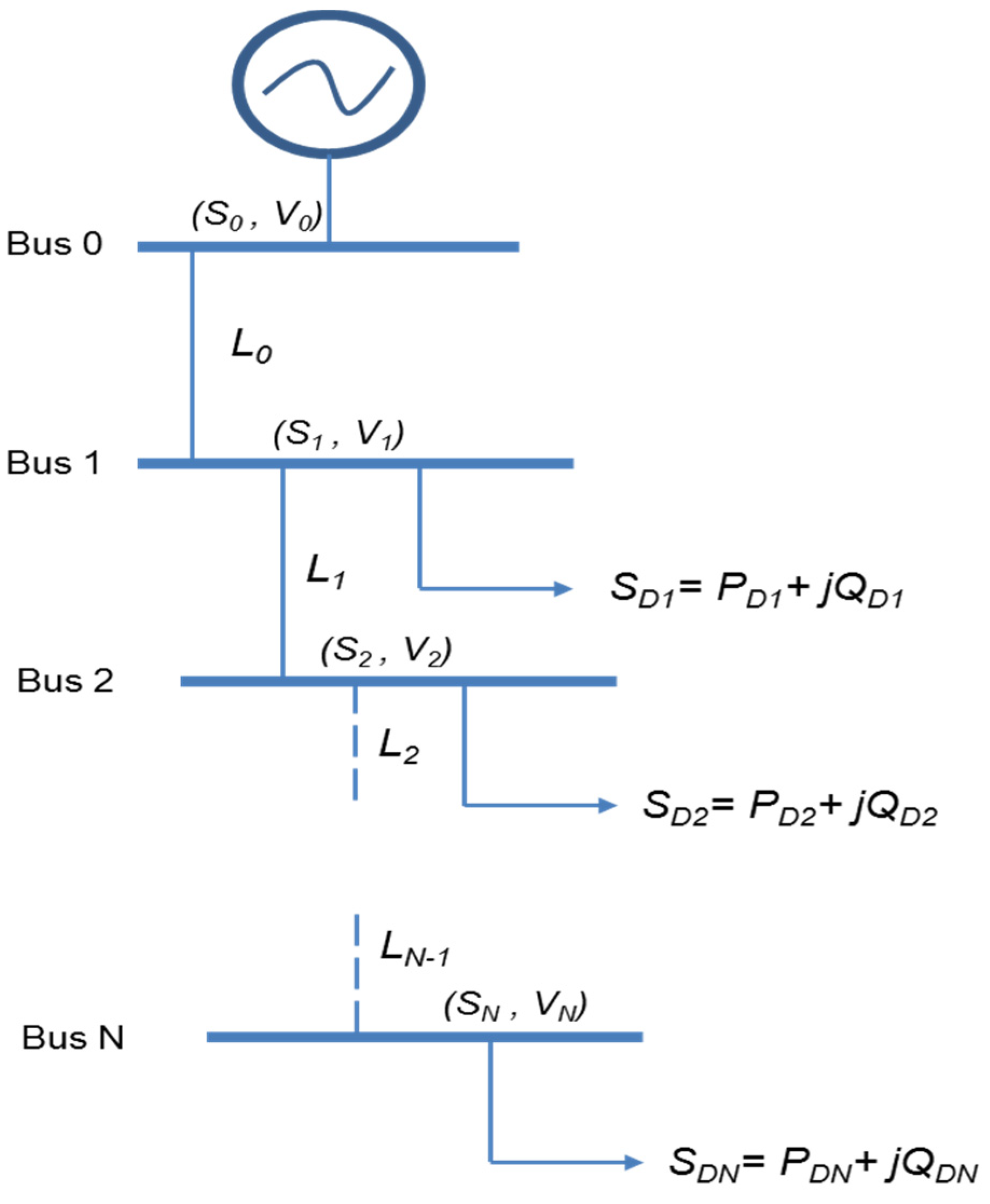
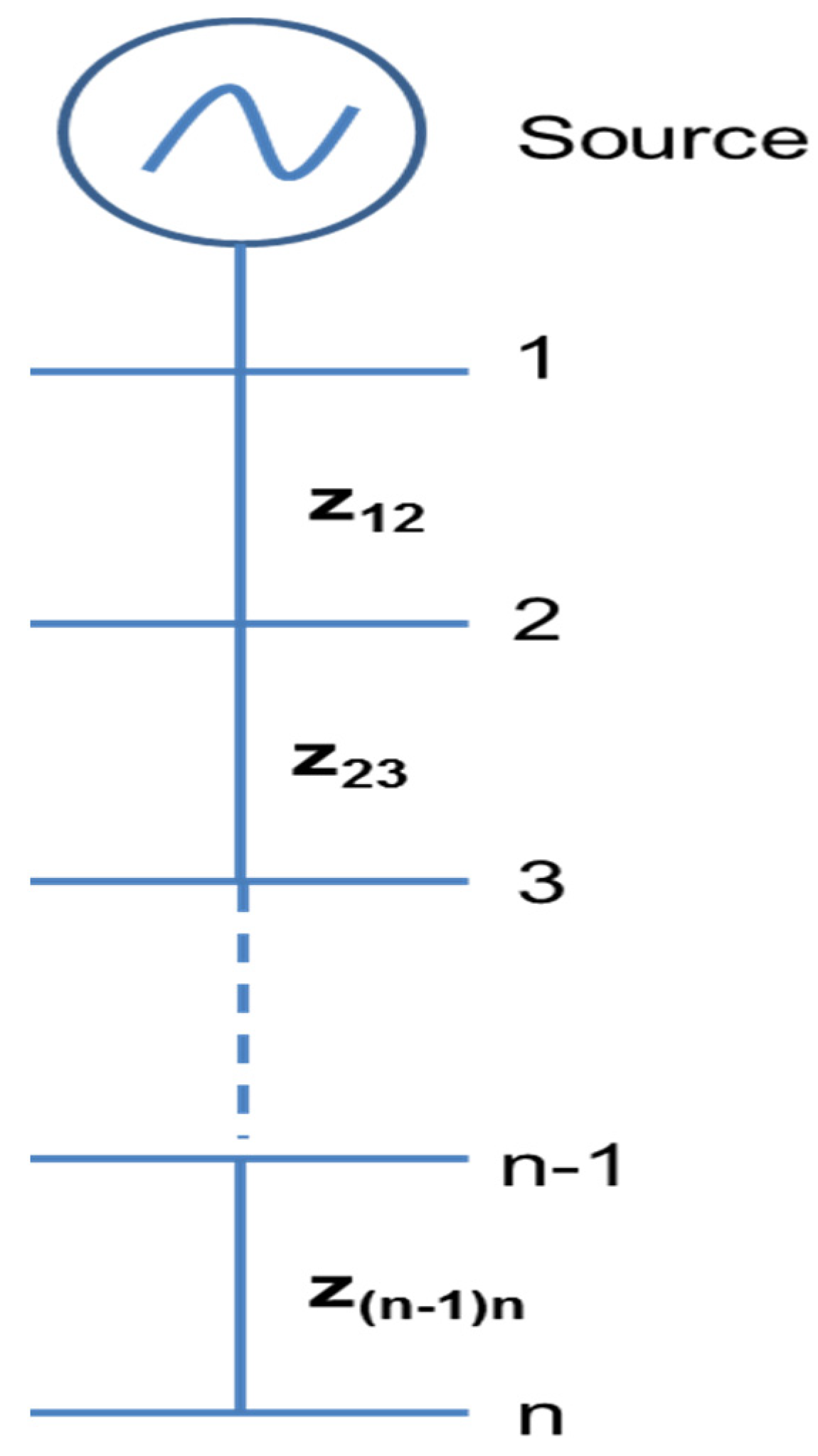
3.1. Analysis of a Distribution Radial Feeder
3.2. The Objective Function and Simulated Annealing Algorithm Applied to a Distribution Feeders
- The objective function: The main objective of optimally placing a distributed generator (DG) on a medium voltage (MV) radial feeder is to ensure that the active and reactive losses are as minimal as possible. In simple terms, the total losses on a radial MV distribution feeder must be minimised when the DG is connected at an optimal position. The minimum and maximum voltages at each bus must not be violated. The thermal ratings of the lines must also not be exceeded. The two conditions mentioned above can be written as follows:
- 2.
- Defining the simulated annealing algorithm:
- -
- Let f indicates the feeder losses.
- -
- Choose a value of the starting temperature T, number of predetermined values n = N−1 (N = number of buses, n = number of bus, excluding the slack bus) and C, which is the temperature scaling factor.
- -
- Obtain the base losses f (X0) using the Newton–Raphson method.
- -
- Set p = 1 and i = 1.
- -
- Randomly choose the bus X1 to connect to the DG too. Compute f (X1) and
- -
- ∆f = f (X1) − f (X0).
- -
- If ∆f ≤ 0, then accept bus X1 as the next design point (bus), else if ∆f > 0, then accept X1 as the next design point with a probability of e−Δf/kT = e−Δf/T, since k = 1 for simplicity reasons, else X1 is rejected. Note the voltage and thermal constraints should not be violated.
- -
- Set i = i + 1 and repeat steps 4 and 5 above. If i ≥ n, then set p = p + 1, scale the temperature by C and then start in step 3.
3.3. The Case Study
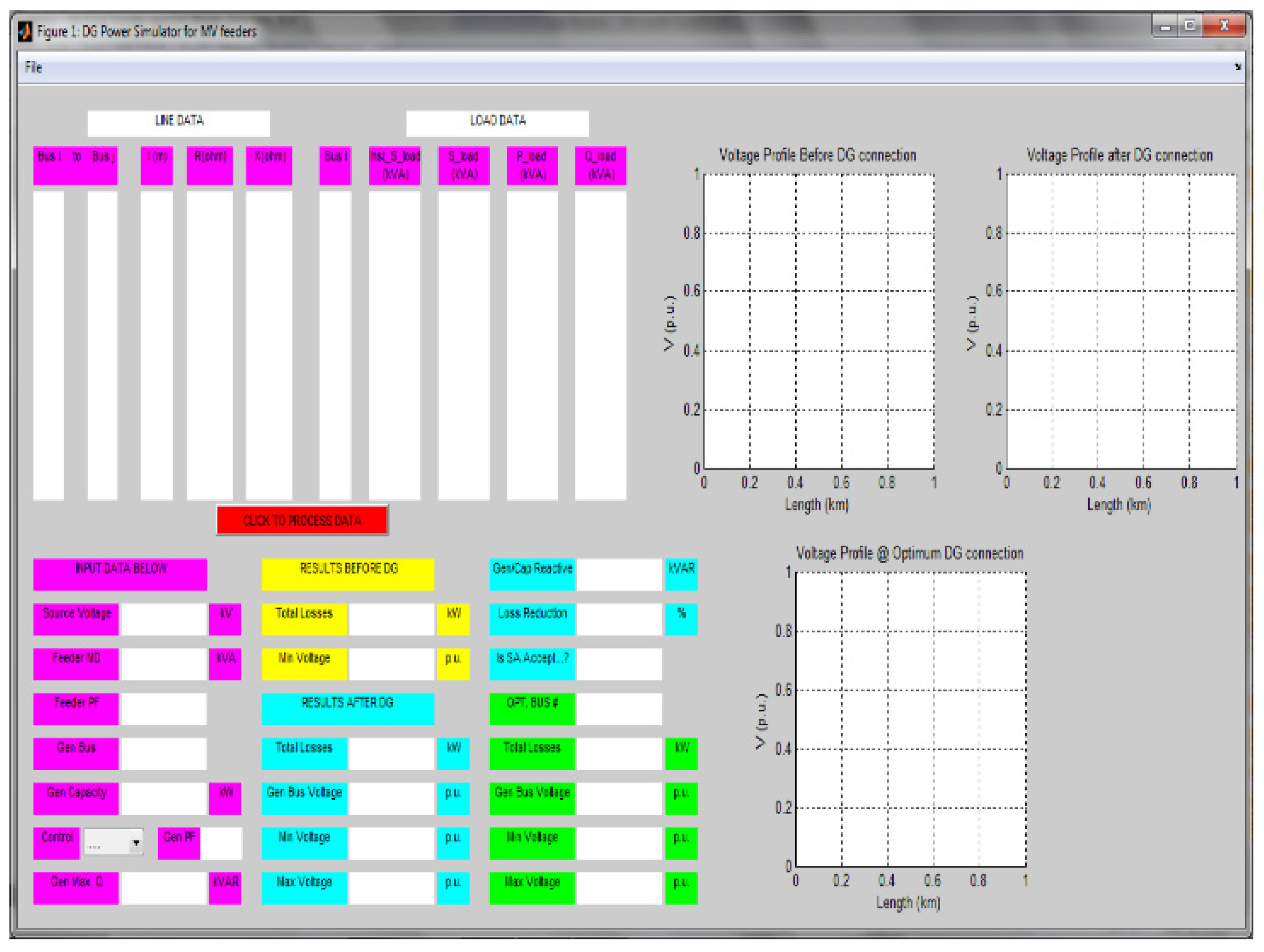
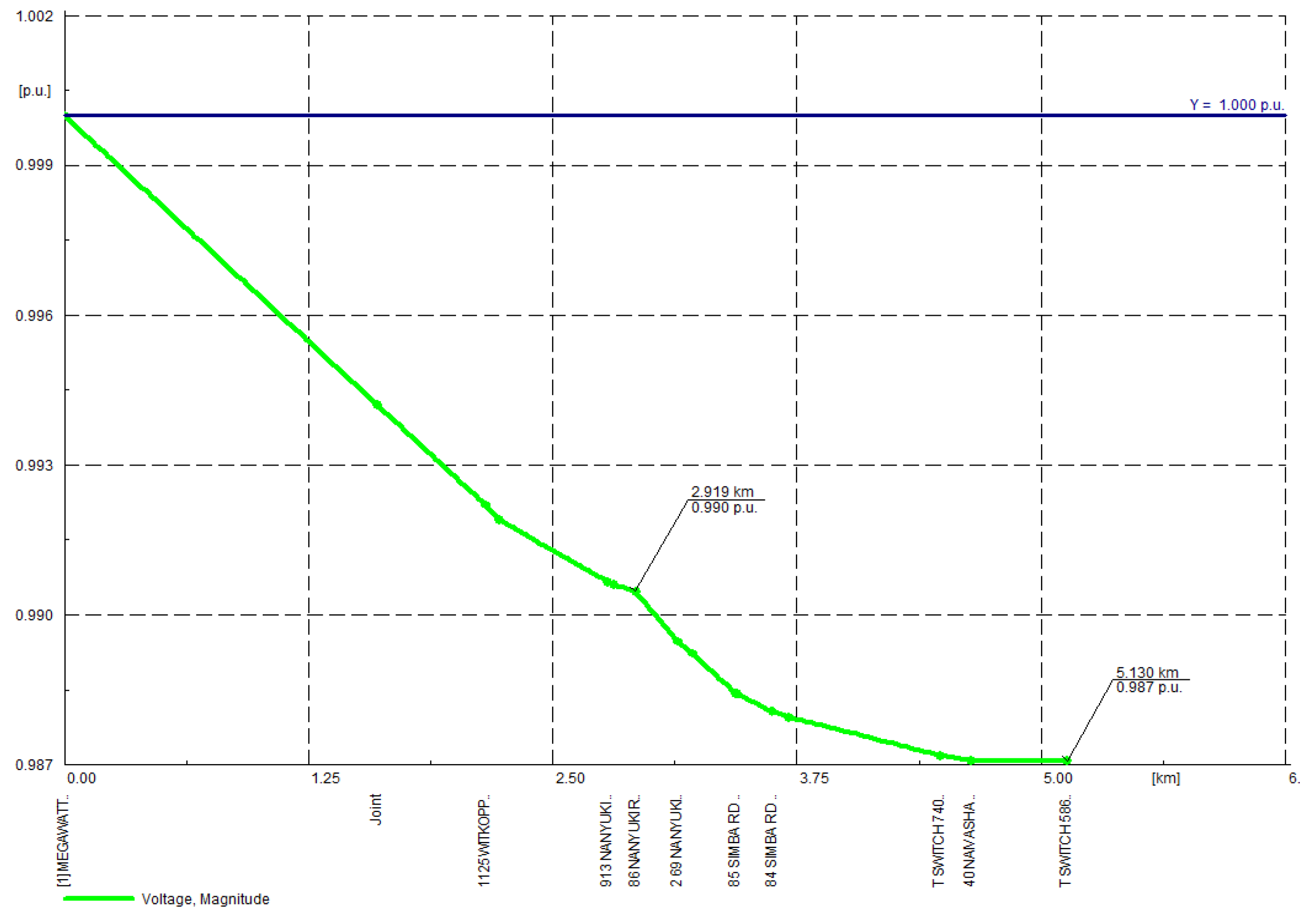
4. Experimental Results
5. Discussion of Results
6. Remarks and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Manzamo-Agugliaro, F.; Alcayde, A.; Montoya, F.G. Scientific production of renewable energies worldwide: An overview. Renew. Sustain. Energy Rev. 2013, 18, 134–143. [Google Scholar] [CrossRef]
- Fossil Fuel. Available online: http://www.sciencedaily.com/articles/f/fossil_fuel.htm (accessed on 20 April 2022).
- Fossil Fuel. Available online: http://en.wikipedia.org/wiki/Fossil_fuel (accessed on 20 April 2022).
- Impact of Fossil Fuel. Available online: http://geoscience.wisc.edu/~chuck/Geo106/lect24.html (accessed on 20 April 2022).
- Pazheri, F.R.; Al-Arainy, A.A.; Othman, M.F.; Malik, N.H. Global renewable electricity potential. In Proceedings of the GCC Conference and Exhibition (GCC), Doha, Qatar, 17–20 November 2013; pp. 59–63. [Google Scholar]
- Williams, A. Role of fossil fuels in electricity generation and their environmental impact. IEE Proc. A Sci. Meas. Technol. 1993, 140, 8–12. [Google Scholar] [CrossRef]
- Turner, W.; Western, J. Nuclear energy’s role in a more sustainable future. In Proceedings of the Opportunities and Advances in International Electric Power Generation, International Conference, Orlando, FL, USA, 18–20 March 1996; Volume 1, pp. 81–86. [Google Scholar]
- Rashad, S.M. Nuclear Power and the Environment Prospects and Challenges. In Proceedings of the Radio Science Conference, Proceedings of the Twenty Third National, Menouf, Egypt, 14–16 March 2006; pp. 1–32. [Google Scholar]
- Available online: http://www.empr.gov.bc.ca/EAED/AEPB/Documents/CleanEnergyJune.pdf (accessed on 20 April 2022).
- Mohibullah, M.; Radzi, A.M.; Hakim, M.I.A. Basic design aspects of micro hydro power plant and its potential development in Malaysia. In Proceedings of the Power and Energy Conference Proceedings, Kuala Lumpur, Malaysia, 29–30 November 2004; pp. 220–223. [Google Scholar]
- Sriram, N.; Shahidehpour, M. Renewable biomass energy. In Proceedings of the Power Engineering Society General Meeting, San Francisco, CA, USA, 12–16 June 2005; Volume 1, pp. 612–617. [Google Scholar]
- Kellas, A. Biomass and electrical energy. In Proceedings of the 7th Mediterranean Conference and Exhibition on Power Generation, Transmission, Distribution and Energy Conversion, Ayia Napa, Cyprus, 7–10 November 2010; pp. 1–7. [Google Scholar]
- Biomess Energy. Available online: http://www.northblythproject.co.uk/biomass-energy/ (accessed on 25 March 2022).
- Renewable Energy. Available online: http://www.window.state.tx.us/specialrpt/energy/renewable/ (accessed on 25 March 2022).
- Solar Systems. Available online: www.kids.esdb.bg/solar.html (accessed on 24 April 2022).
- Solar Power Systems. Available online: http://en.wikipedia.org/wiki/Concentrated_solar_power (accessed on 30 March 2022).
- Freris, L.; Infield, D. Renewable Energy in Power Systems; John Wiley and Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- PowerFactory Training Notes. Introduction to Renewable Energy Generation; DigSilent Buyisa: Centurion, South Africa, 2019. [Google Scholar]
- Available online: http://www.irena.org (accessed on 30 March 2022).
- Siraj, K.; Siraj, H.; Nasir, M. Modeling and control of a doubly fed induction generator for grid integrated wind turbine. In Proceedings of the 2022 16th International Power Electronics and Motion Control Conference and Exposition (PEMC), Antalya, Turkey, 21–24 September 2014; pp. 901–906. [Google Scholar]
- Available online: http://en.wikipedia.org/wiki/Photovoltaic_power_station (accessed on 3 April 2022).
- Available online: www.eskom.co.za (accessed on 30 March 2022).
- Sharma, V.V.; Chawla, H. Integrated renewable systems. In Proceedings of the Power, Control and Embedded Systems (ICPCES), 2nd International Conference, Allahabad, India, 17–19 December 2012; pp. 1–6. [Google Scholar]
- Wind Turbine Foundations. Available online: http://wind-turbine.tripod.com (accessed on 15 March 2022).
- Energy Systems. Available online: http://www.esru.strath.ac.uk (accessed on 20 March 2022).
- Matlab. Available online: www.mathworks.com (accessed on 25 March 2022).
- Department of Mineral Resources and Energy. Available online: www.energy.gov.za (accessed on 15 March 2022).
- South African Weather Services. Available online: www.weathersa.co.za (accessed on 15 March 2022).
- Renewable Energy World. Available online: http://www.renewableenergyworld.com (accessed on 27 April 2022).
- Global Warming 101. Available online: www.nrdc.org/globalwarming/ (accessed on 27 January 2022).
- Radioactive Waster. Available online: http://en.wikipedia.org/wiki/Radioactive_waste (accessed on 15 March 2022).
- Hydropower Industry. Available online: http://www.internationalrivers.org/environmental-impacts-of-dams (accessed on 17 March 2022).
- Available online: http://www.oregon.gov/ODOT/HWY/OIPP/docs/ (accessed on 17 March 2022).
- Khani, D.; Yazdankhah, A.S.; Kojabadi, H.M. Impacts of distributed generations on power system transient and voltage stability. Int. J. Electr. Power Energy Syst. 2012, 43, 488–500. [Google Scholar] [CrossRef]
- Rao, S.S. Engineering Optimization: Theory and Practice, 4th ed.; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Walsh, G.R. Methods of Optimization, 1st ed.; John Wiley and Sons: Hoboken, NJ, USA, 1975. [Google Scholar]
- Nemhauser, G.L.; Rinnooy, K.A.H.G.; Todd, M.J. Optimization, Handbooks in Operations Research and Management Science; Elsevier Science: North-Holland, The Netherlands, 1989; Volume 1. [Google Scholar]
- Raghavjee, R.; Pillay, N. A Comparison of Genetic Algorithms and Genetic Programming in Solving the School Timetabling Problem. In Proceedings of the Fourth World Congress on Nature and Biologically Inspired Computing (NaBIC), Mexico City, Mexico, 5–9 November 2012; pp. 98–103. [Google Scholar]
- Sickel, K.; Hornegger, J. Genetic Programming for Expert Systems. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Filho, J.L.R.; Treleaven, P.C.; Alippi, C. Genetic-algorithm programming environments. Computer 1994, 27, 28–43. [Google Scholar] [CrossRef]
- del Valle, Y.; Venayagamoorthy, G.K.; Mohagheghi, S.; Hernandez, J.C.; Harley, R.G. Particle Swarm Optimization: Basic Concepts, Variants and Applications in Power Systems. IEEE Trans. Evol. Comput. 2008, 12, 171–195. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Alkandari, A.M.; Soliman, S.A.; Mantwy, A.H. Simulated annealing optimization algorithm for electric power systems quality analysis: Harmonics and voltage flickers. In Proceedings of the 2008 12th International Middle East Power System Conference—MEPCON, Aswan, Egypt, 12–15 March 2008; pp. 287–293. [Google Scholar]
- Li, Y.; Czarkowski, D.; de Leon, F. Optimal Distributed Voltage Regulation for Secondary Networks with DGs. IEEE Trans. Smart Grid 2012, 3, 959–967. [Google Scholar]
- Lee, S.H.; Park, J. Optimal Placement and Sizing of Multiple DGs in a Practical Distribution System by Considering Power Loss. IEEE Trans. Ind. Appl. 2013, 49, 2262–2270. [Google Scholar] [CrossRef]
- Foster, J.; Berry, A.M.; Boland, N.; Waterer, H. Comparison of Mixed-Integer Programming and Genetic Algorithm Methods for Distributed Generation Planning. IEEE Trans. Power Syst. 2022, 29, 833–843. [Google Scholar] [CrossRef]
- Duong, Q.H.; Mithulananthan, N. Multiple Distributed Generator Placement in Primary Distribution Networks for Loss Reduction. IEEE Trans. Ind. Electron. 2013, 60, 1700–1708. [Google Scholar]
- Kashem, M.A.; Ganapathy, V.; Jasmon, G.B.; Buhari, M.I. A novel method for loss minimization in distribution networks. In Proceedings of the International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, London, UK, 4–7 April 2000; pp. 251–256. [Google Scholar]
- George, S.P.; Ashok, S.; Bandyopadhyay, M.N. Impact of distributed generation on protective relays. In Proceedings of the 2013 International Conference on Renewable Energy and Sustainable Energy (ICRESE), Coimbatore, India, 5–6 December 2013; pp. 157–161. [Google Scholar]
- National Energy Regulator of South Africa. Grid Connection Code for Renewable Power Plants (RPPs) Connected to the Electricity Transmission System (TS) or Distribution System (DS) in South Africa; National Energy Regulator of South Africa: Pretoria, South Africa, 2022.
- Azmy, A.M.; Erlich, I. Impact of distributed generation on the stability of electrical power system. In Proceedings of the IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 12–16 June 2005; Volume 2, pp. 1056–1063. [Google Scholar]
- Slootweg, J.G.; Kling, W.L. Impacts of distributed generation on power system transient stability. In Proceedings of the Power Engineering Society Summer Meeting, Chicago, IL, USA, 21–25 July 2002; Volume 2, pp. 862–867. [Google Scholar]
- Camilo, L.; Cebrian, J.C.; Kagan, N.; Matsuo, N.M. Impact of distributed generation units on the sensitivity of customers to voltage sags. In Proceedings of the 8th International Conference and Exhibition on Electricity Distribution (CIRED 2005), Turin, Italy, 6–9 June 2005; pp. 1–4. [Google Scholar]
- Caples, D.; Boljevic, S.; Conlon, M.F. Impact of distributed generation on voltage profile in 38kV distribution system. In Proceedings of the 2011 8th International Conference on the European Energy Market (EEM), Zagreb, Croatia, 25–27 May 2011; pp. 532–536. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus i | Bus j | Conductor Type | R1 (ogm/lm) | X1 (ohm/km) | Length (km) | R1 (ohm) | X1 (ohm) |
|---|---|---|---|---|---|---|---|
| 1 | 2 | 0.06100 | 0.20800 | 2.15548 | 0.13148 | 0.44834 | |
| 2 | 3 | 0.10100 | 0.20000 | 0.06938 | 0.00701 | 0.01378 | |
| 3 | 4 | 0.10100 | 0.20000 | 0.55570 | 0.05613 | 0.11114 | |
| 4 | 5 | 0.10100 | 0.20000 | 0.02936 | 0.00297 | 0.00587 | |
| 5 | 6 | 0.06100 | 0.20800 | 0.11460 | 0.00699 | 0.02384 | |
| 6 | 7 | 1.16400 | 0.22000 | 0.21340 | 0.03500 | 0.04695 | |
| 7 | 8 | 0.10100 | 0.20000 | 0.07913 | 0.00800 | 0.01583 | |
| 8 | 9 | 0.16400 | 0.22000 | 0.22030 | 0.03613 | 0.04847 | |
| 9 | 10 | 0.10100 | 0.20000 | 0.18400 | 0.01858 | 0.03680 | |
| 10 | 11 | 0.10100 | 0.20000 | 0.08539 | 0.00862 | 0.01708 | |
| 11 | 12 | 0.10100 | 0.20000 | 0.77576 | 0.07835 | 0.155151 | |
| 12 | 13 | 0.10100 | 0.20000 | 0.15578 | 0.01573 | 0.031156 | |
| 13 | 14 | 0.10100 | 0.20000 | 0.49124 | 0.04962 | 0.098248 |
| Bus No | SL (kVA) | pf | PL (kW) | QL (kvar) | PL (p.u.) | QL (p.u.) |
|---|---|---|---|---|---|---|
| 1 | 0 | 0.94 | 0 | 0 | 0 | 0 |
| 2 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 3 | 1518.3 | 0.94 | 1427.20 | 518.01 | 0.22 | 0.08 |
| 4 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 5 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 6 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 7 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 8 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 9 | 506.1 | 0.94 | 475.73 | 172.67 | 0.07 | 0.03 |
| 10 | 445.8 | 0.94 | 419.05 | 152.10 | 0.06 | 0.02 |
| 11 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 12 | 253 | 0.94 | 237.82 | 86.32 | 0.04 | 0.01 |
| 13 | 506.1 | 0.94 | 475.73 | 172.67 | 0.07 | 0.03 |
| 14 | 0 | 0.94 | 0 | 0 | 0 | 0 |
| Bus for DG Connection | DG Control Function | Description of Feeder Results | Simulation Results with Matlab Tool | Simulation Results with DigSilent Power Factory | % Error |
|---|---|---|---|---|---|
| Not applicable (Before DG connection) | Not applicable | Losses (kW) | 38.21 | 38.57 | 0.93 |
| Minimum Voltage (p.u.) | 0.98158 | 0.98172 | 0.01 | ||
| Bus 6 | Power Factor Control | Losses (kW) | 18.32 | 18.68 | 1.93 |
| Generator Bus Voltage (p.u.) | 0.99051 | 0.99047 | 0.00 | ||
| Minimum Voltage (p.u.) | 0.98707 | 0.98708 | 0.00 | ||
| Loss Reduction (%) | 52.05 | 51.57 | 0.93 | ||
| Constant Voltage Control | Losses (kW) | 17.25 | 17.74 | 2.76 | |
| Generator Bus Voltage (p.u.) | 0.99250 | 0.99236 | 0.01 | ||
| Minimum Voltage (p.u.) | 0.98908 | 0.98897 | 0.01 | ||
| Loss Reduction (%) | 54.85 | 54.01 | 1.55 | ||
| Constant Voltage Control with reactive power compensation | Losses (kW) | 18.06 | 18.9 | 4.44 | |
| Generator Bus Voltage (p.u.) | 1.00000 | 1.00000 | 0.00 | ||
| Minimum Voltage (p.u.) | 0.99660 | 0.99658 | 0.00 | ||
| Reactive compensation (kVar) | 1500 | 1600 | 6.25 | ||
| Difference in Q-compensations (kVar) | 100 | ||||
| Loss Reduction (%) | 52.73 | 51.00 | 3.29 | ||
| Bus 14 (End of feeder) | Power Factor Control | Losses (kW) | 16.24 | 16.66 | 2.52 |
| Generator Bus Voltage (p.u.) | 0.99226 | 0.99207 | 0.02 | ||
| Minimum Voltage (p.u.) | 0.98996 | 0.98965 | 0.03 | ||
| Loss Reduction (%) | 57.50 | 56.81 | 1.20 | ||
| Constant Voltage Control | Losses (kW) | 15.78 | 16.29 | 3.13 | |
| Generator Bus Voltage (p.u.) | 0.99572 | 0.99546 | 0.03 | ||
| Minimum Voltage (p.u.) | 0.99231 | 0.99212 | 0.02 | ||
| Loss Reduction (%) | 58.70 | 57.77 | 1.60 | ||
| Constant Voltage Control with reactive power compensation | Losses (kW) | 16.88 | 17.58 | 3.98 | |
| Generator Bus Voltage (p.u.) | 1.00000 | 1.00000 | 0.00 | ||
| Minimum Voltage (p.u.) | 0.99493 | 0.99490 | 0.00 | ||
| Reactive compensation (kVar) | 494 | 600 | 17.67 | ||
| Difference in Q-compensations (kVar) | 106 | ||||
| Loss Reduction (%) | 55.82 | 54.42 | 2.51 | ||
| Bus 11 (Optimal Bus) | Power Factor Control | Losses (kW) | 14.94 | 15.35 | 2.67 |
| Generator Bus Voltage (p.u.) | 0.99009 | 0.99004 | 0.01 | ||
| Minimum Voltage (p.u.) | 0.98919 | 0.98888 | 0.03 | ||
| Loss Reduction (%) | 60.90 | 60.20 | 1.15 | ||
| Constant Voltage Control | Losses (kW) | 13.94 | 14.49 | 3.80 | |
| Generator Bus Voltage (p.u.) | 0.99263 | 0.99243 | 0.02 | ||
| Minimum Voltage (p.u.) | 0.99173 | 0.99156 | 0.02 | ||
| Loss Reduction (%) | 63.52 | 62.43 | 1.71 | ||
| Constant Voltage Control with reactive power compensation | Losses (kW) | 15.69 | 16.59 | 5.42 | |
| Generator Bus Voltage (p.u.) | 1.00000 | 1.00000 | 0.00 | ||
| Minimum Voltage (p.u.) | 0.99789 | 0.99788 | 0.00 | ||
| Reactive compensation (kVar) | 1159 | 1200 | 3.42 | ||
| Difference in Q-compensations (kVar) | 41 | ||||
| Loss Reduction (%) | 58.94 | 56.99 | 3.31 | ||
| Bus for DG Connection | DG Control Scheme | Description of Result | Simulation Results with Matlab Tool @ MD = 5 MVA | Simulation Results with Matlab Tool @ MD = 3 MVA |
|---|---|---|---|---|
| Not applicable Before DG connection) | Not applicable | Losses (kW) | 38.21 | 13.81 |
| Minimum Voltage (p.u.) | 0.98158 | 0.98898 | ||
| Bus 6 | Power Factor Control | Losses (kW) | 18.32 | 3.72 |
| Generator Bus Voltage (p.u.) | 0.99051 | 0.99641 | ||
| Minimum Voltage (p.u.) | 0.98707 | 0.99435 | ||
| Loss Reduction (%) | 52.05 | 73.06 | ||
| Optimal Bus Number | 11 | 10 | ||
| Bus 6 | Constant Voltage Control | Losses (kW) | 17.25 | 3.5 |
| Generator Bus Voltage (p.u.) | 0.9925 | 0.99839 | ||
| Minimum Voltage (p.u.) | 0.98908 | 0.99633 | ||
| Loss Reduction (%) | 54.85 | 74.66 | ||
| Optimal Bus Number | 11 | 9 | ||
| Bus 6 | Constant Voltage Control with reactive power compensation | Losses (kW) | 18.06 | 3.72 |
| Generator Bus Voltage (p.u.) | 1 | 1 | ||
| Minimum Voltage (p.u.) | 0.99660 | 0.99795 | ||
| Loss Reduction (%) | 52.73 | 95.02 | ||
| Optimal Bus Number | 11 | 10 | ||
| ReactivePower Compensation | 1500 | 324 | ||
| Bus 10 (Optimal Bus when using PF Control) | Power Factor Control | Losses (kW) | 2.58 | |
| Generator Bus Voltage (p.u.) | 0.99685 | |||
| Minimum Voltage (p.u.) | 0.99624 | |||
| Loss Reduction (%) | 81.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lekhuleni, T.; Twala, B. Distributed Optimal Placement Generators in a Medium Voltage Redial Feeder. Symmetry 2022, 14, 1729. https://doi.org/10.3390/sym14081729
Lekhuleni T, Twala B. Distributed Optimal Placement Generators in a Medium Voltage Redial Feeder. Symmetry. 2022; 14(8):1729. https://doi.org/10.3390/sym14081729
Chicago/Turabian StyleLekhuleni, Teddy, and Bhekisipho Twala. 2022. "Distributed Optimal Placement Generators in a Medium Voltage Redial Feeder" Symmetry 14, no. 8: 1729. https://doi.org/10.3390/sym14081729
APA StyleLekhuleni, T., & Twala, B. (2022). Distributed Optimal Placement Generators in a Medium Voltage Redial Feeder. Symmetry, 14(8), 1729. https://doi.org/10.3390/sym14081729