
Performance-Based Seismic Design of Hybrid Isolation Systems with Gap-Tunable BRBs for Bearing-Supported Bridges

Abstract
:1. Introduction
2. Models and Methods
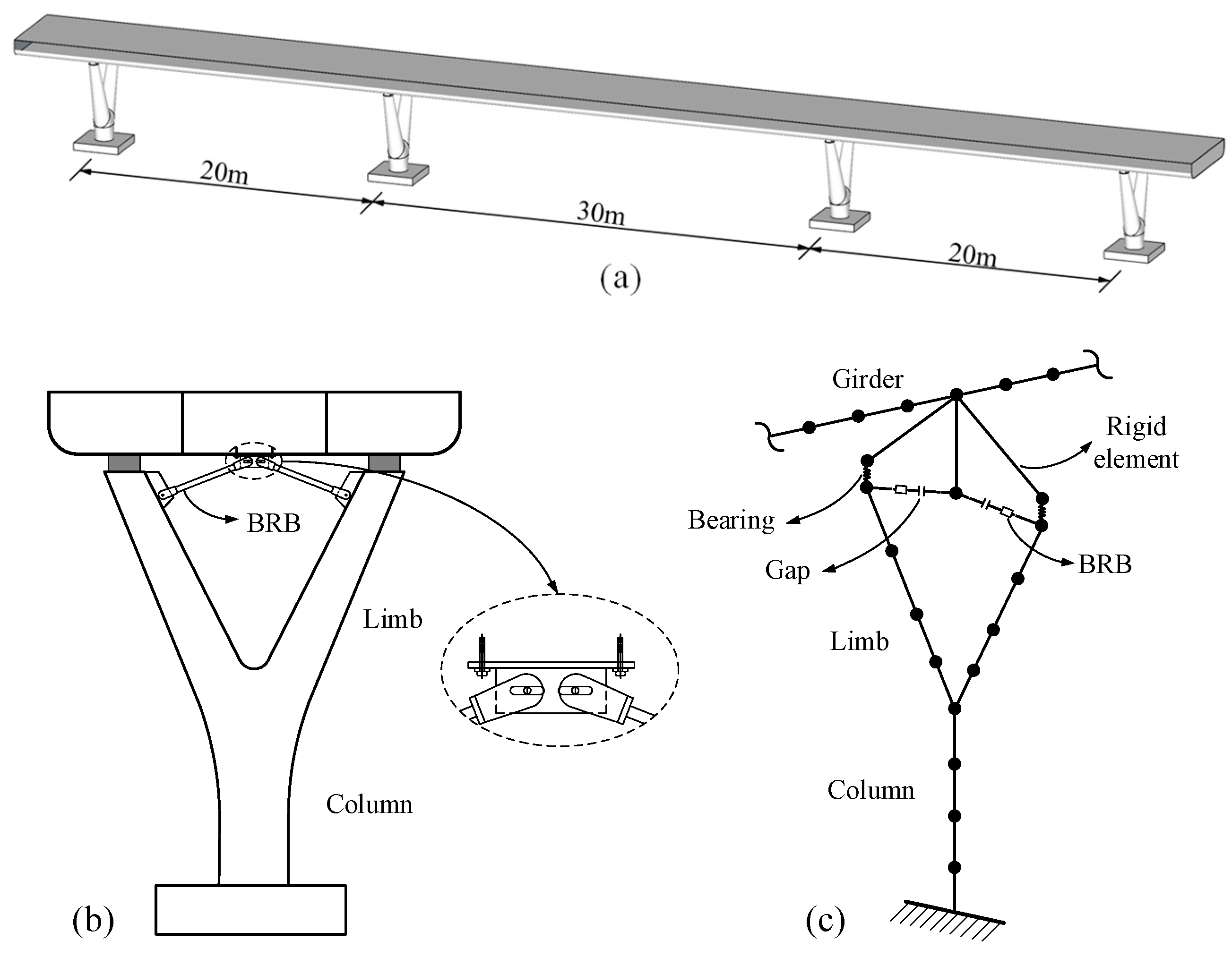
2.1. Prototype Bridge Modeling
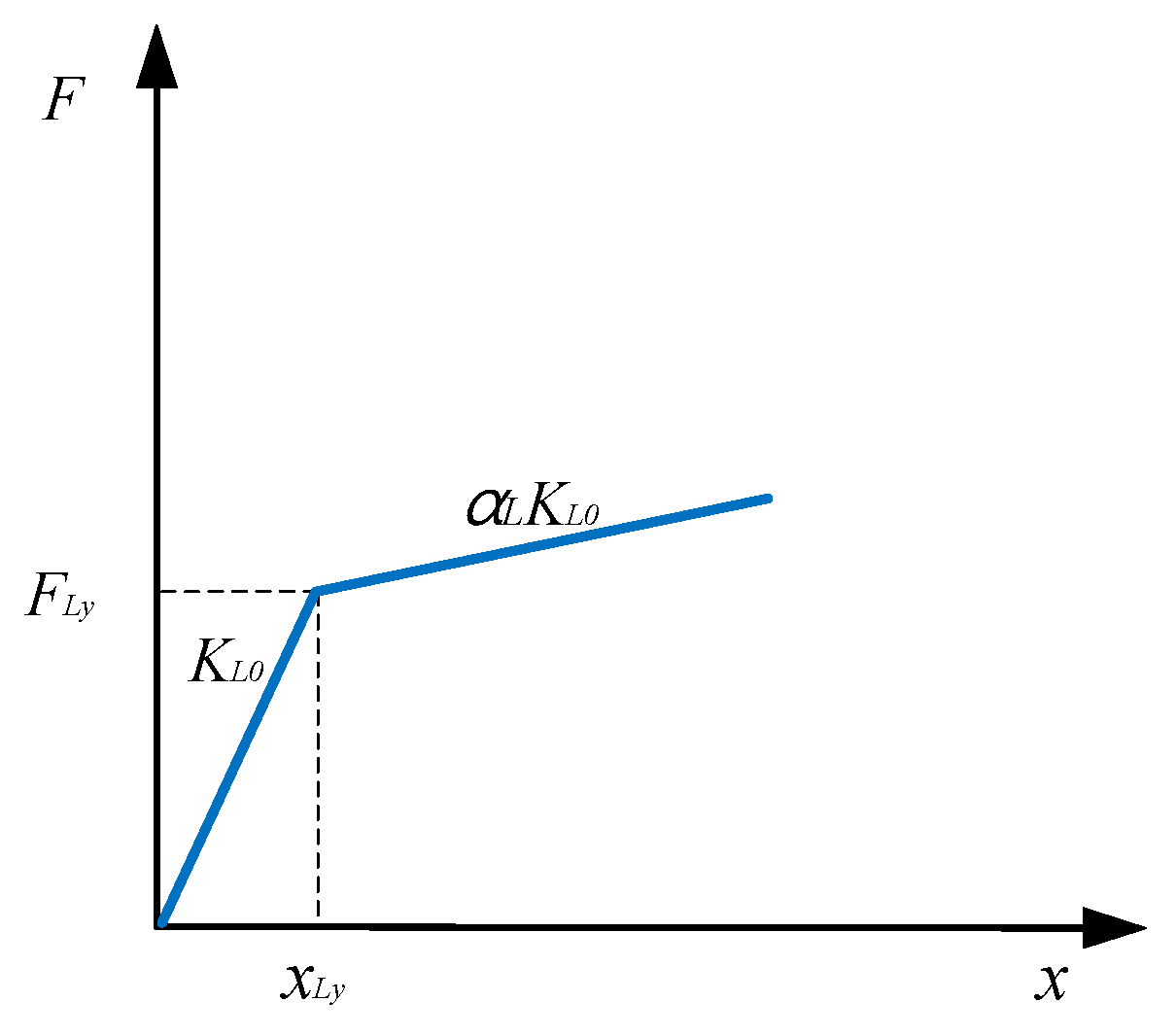
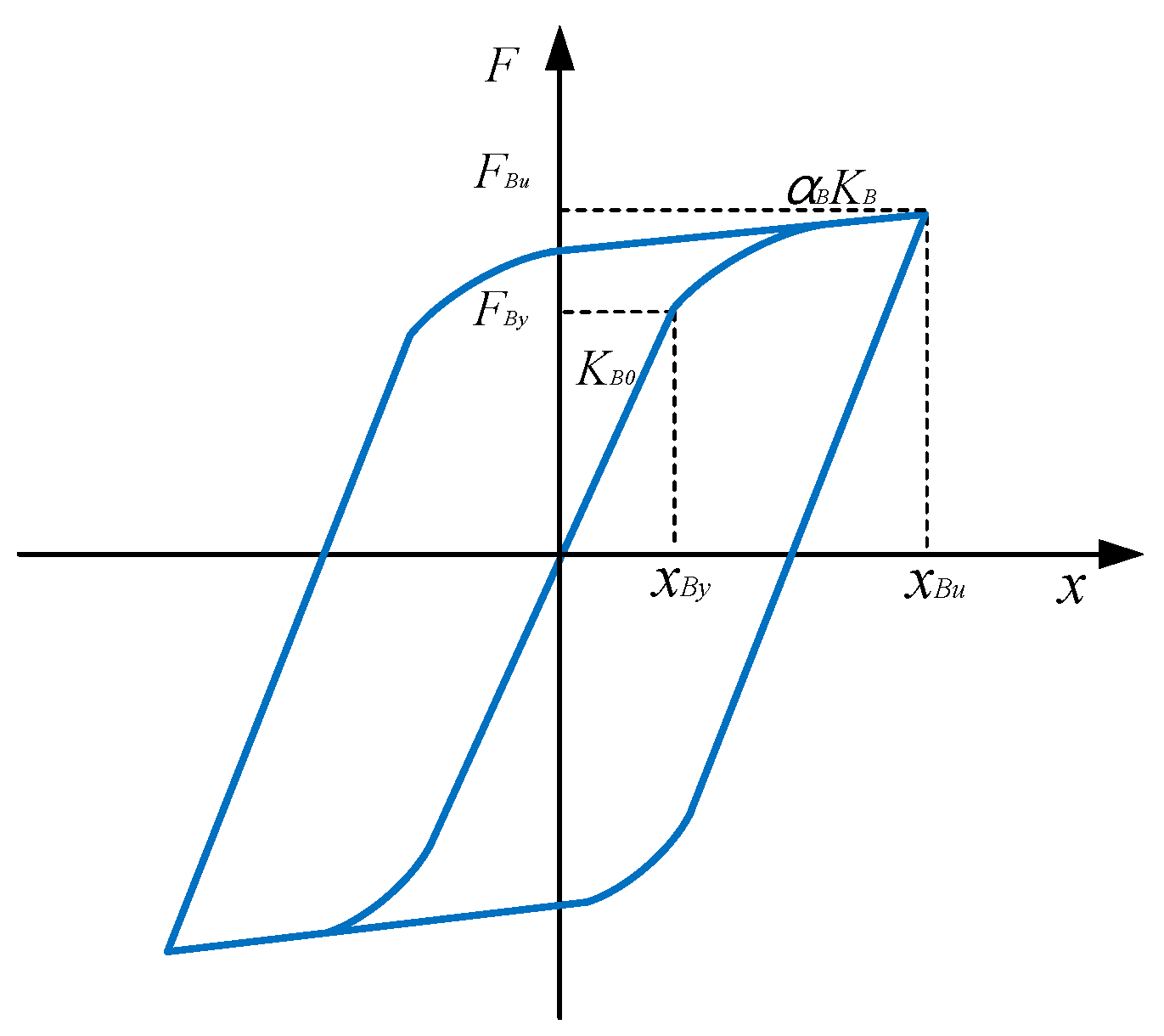
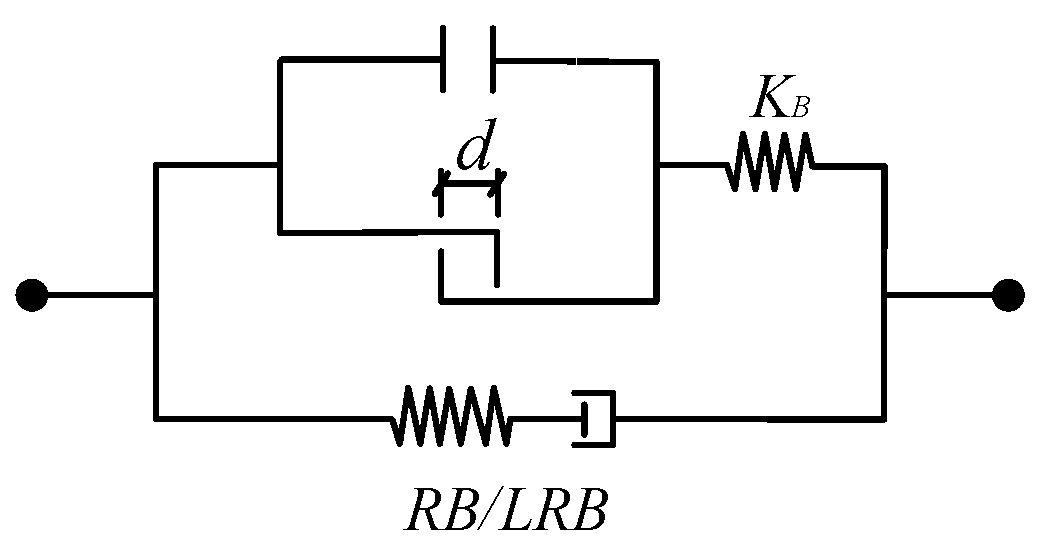
2.2. Modelling of Isolation Systems
2.3. Multi-Level Earthquakes and Performance Objectives
3. Results and Discussion
3.1. Preliminary Seismic Design for Bridges with Hybrid Isolation Systems
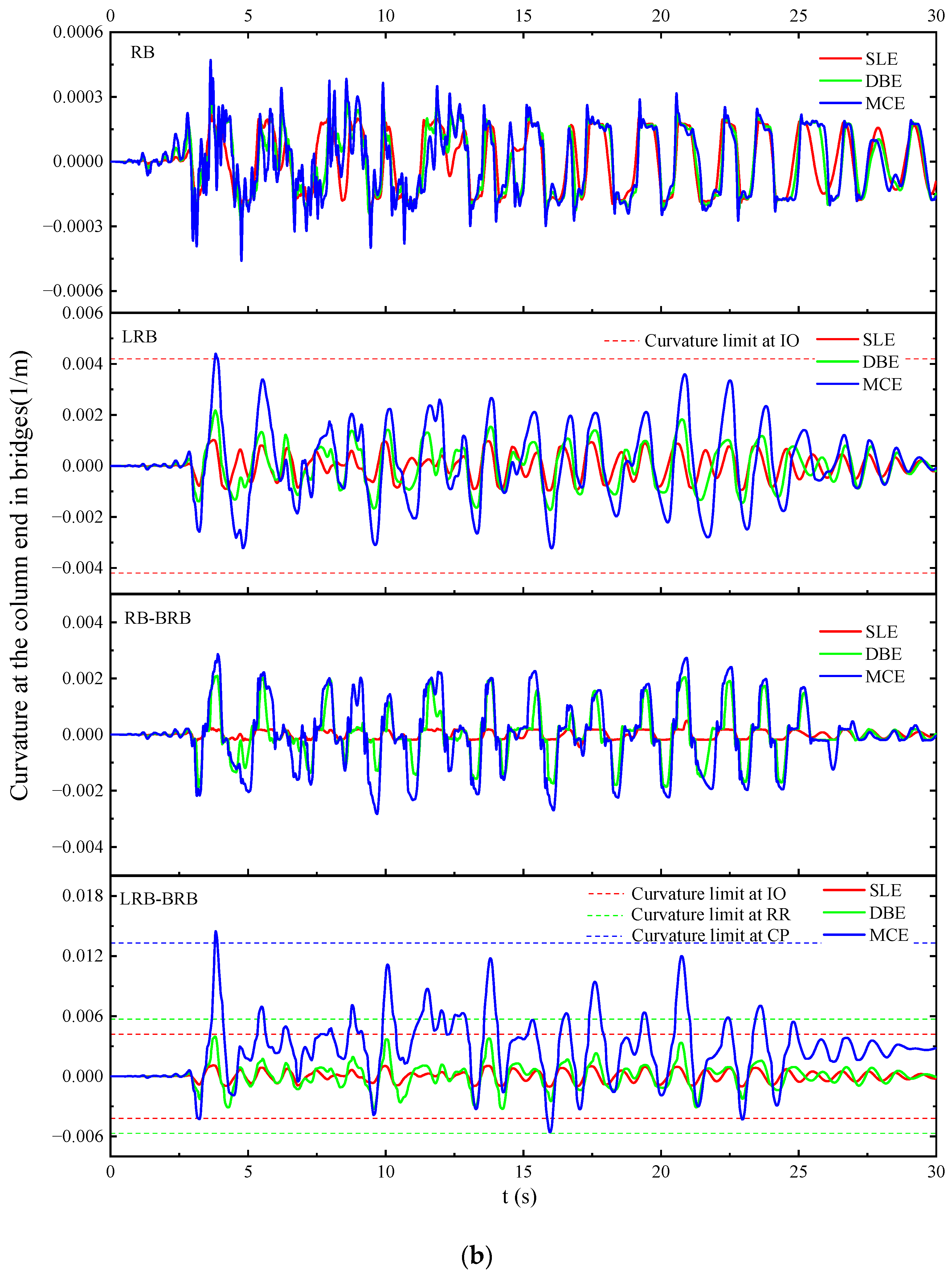
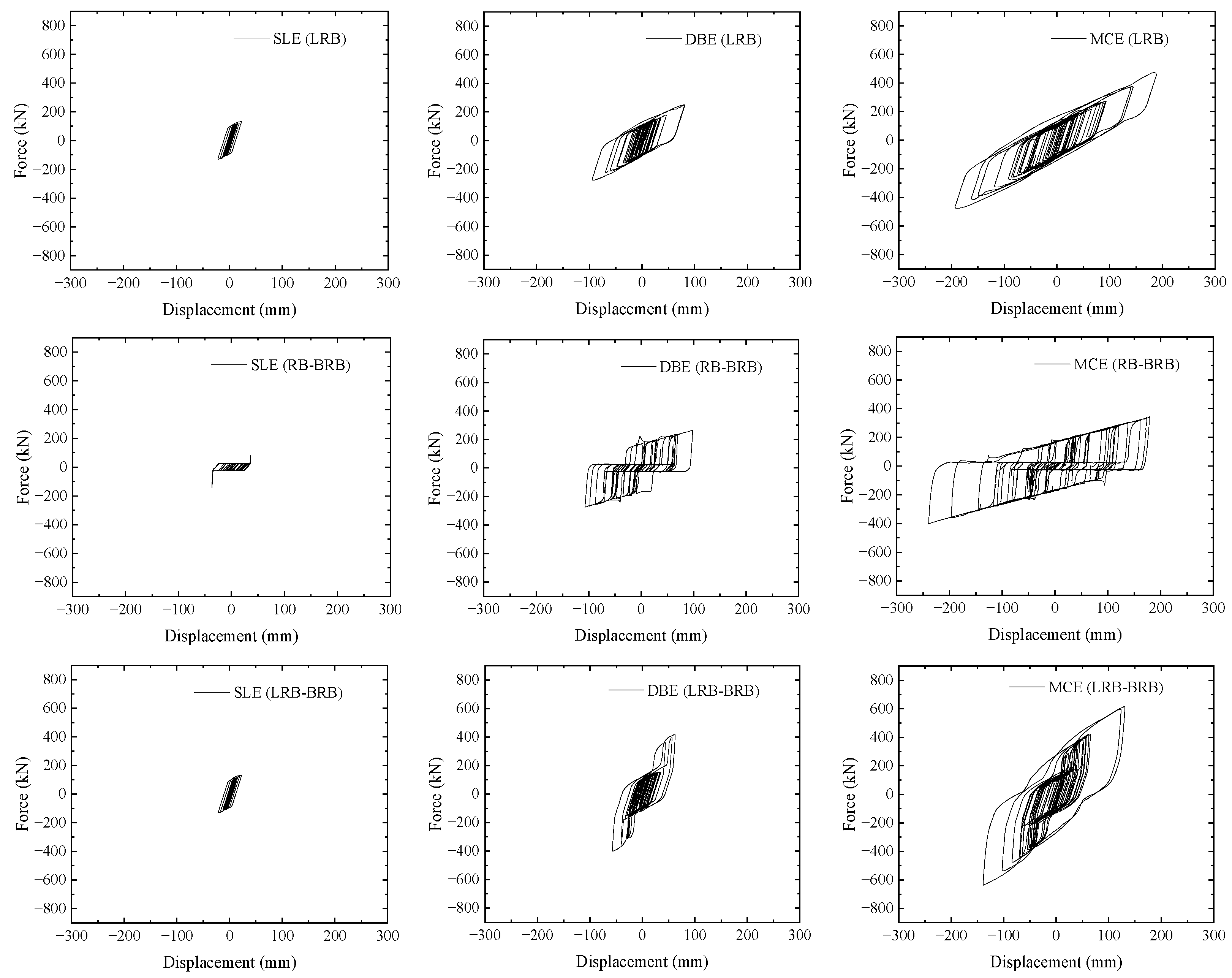
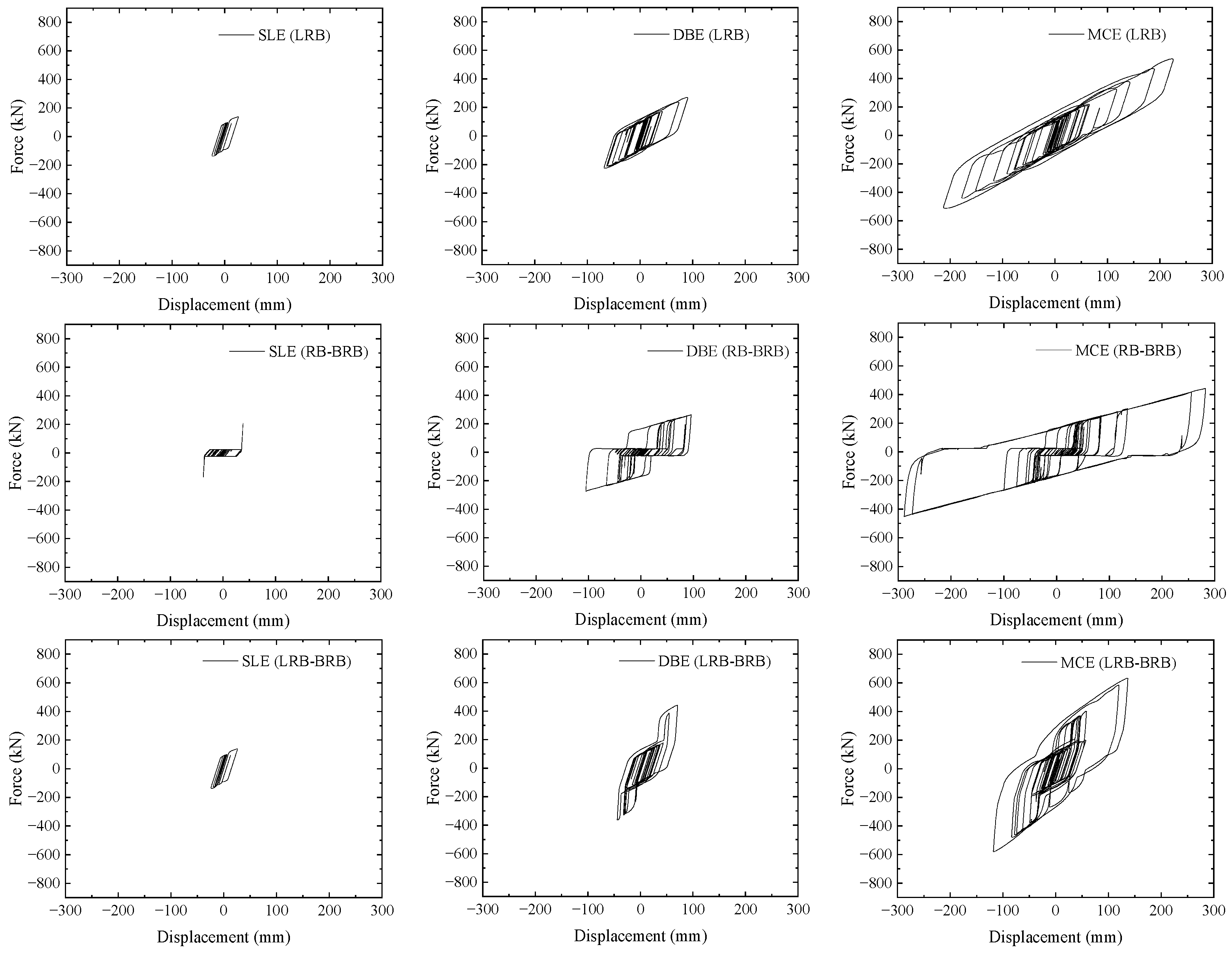
3.2. Seismic Analyses of the Isolated Bridges at Different Seismic Levels
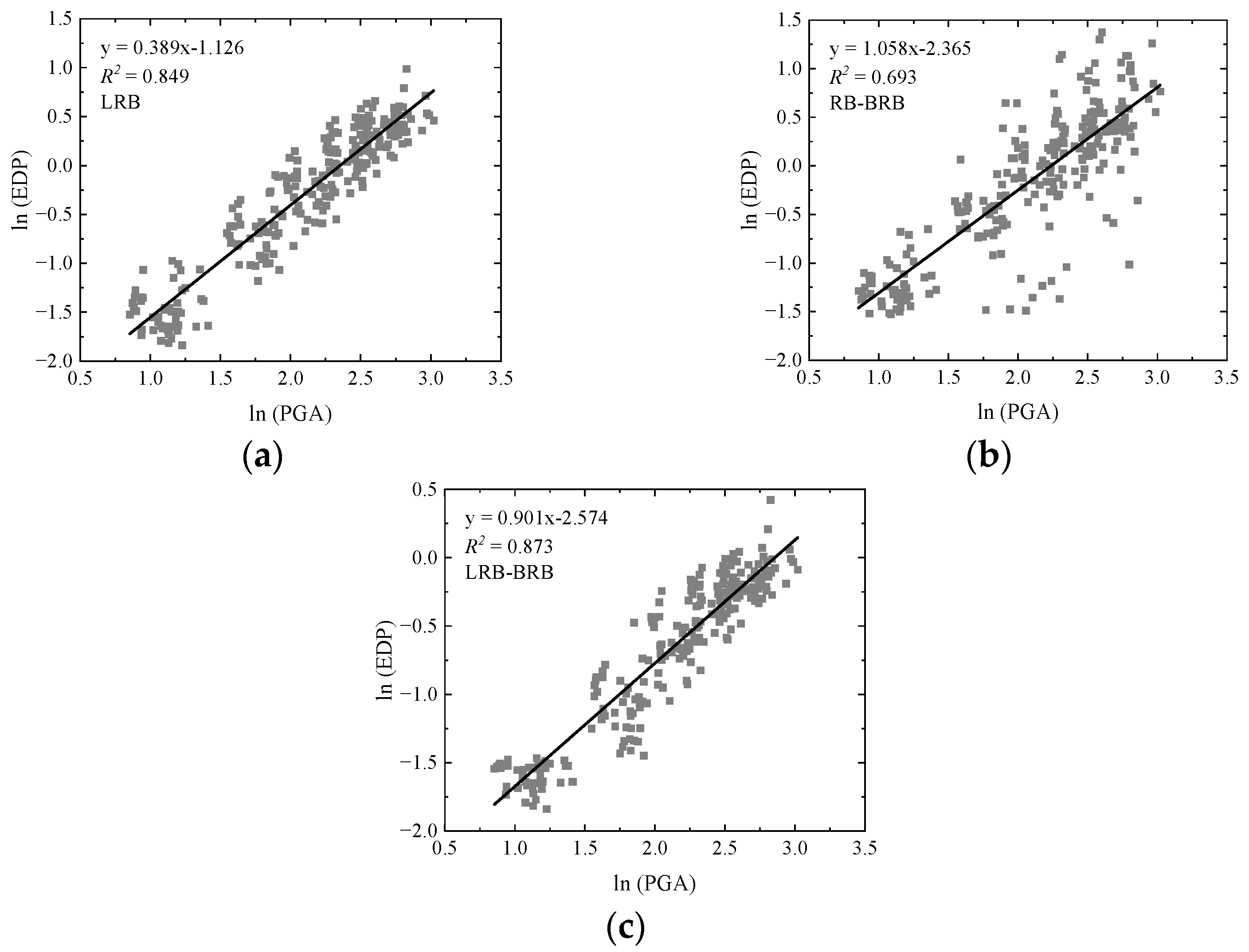
3.3. Optimal Seismic Design Based on the Fragility Analyses
4. Conclusions
- (1)
- A simplified energy-based seismic design of the bridge with the RB–BRB and LRB–BRB hybrid isolation systems was proposed based on the energy-conservation concept. This could provide a rational preliminary design for bearing-supported bridges with hybrid isolation systems to meet the energy demands at different seismic intensities.
- (2)
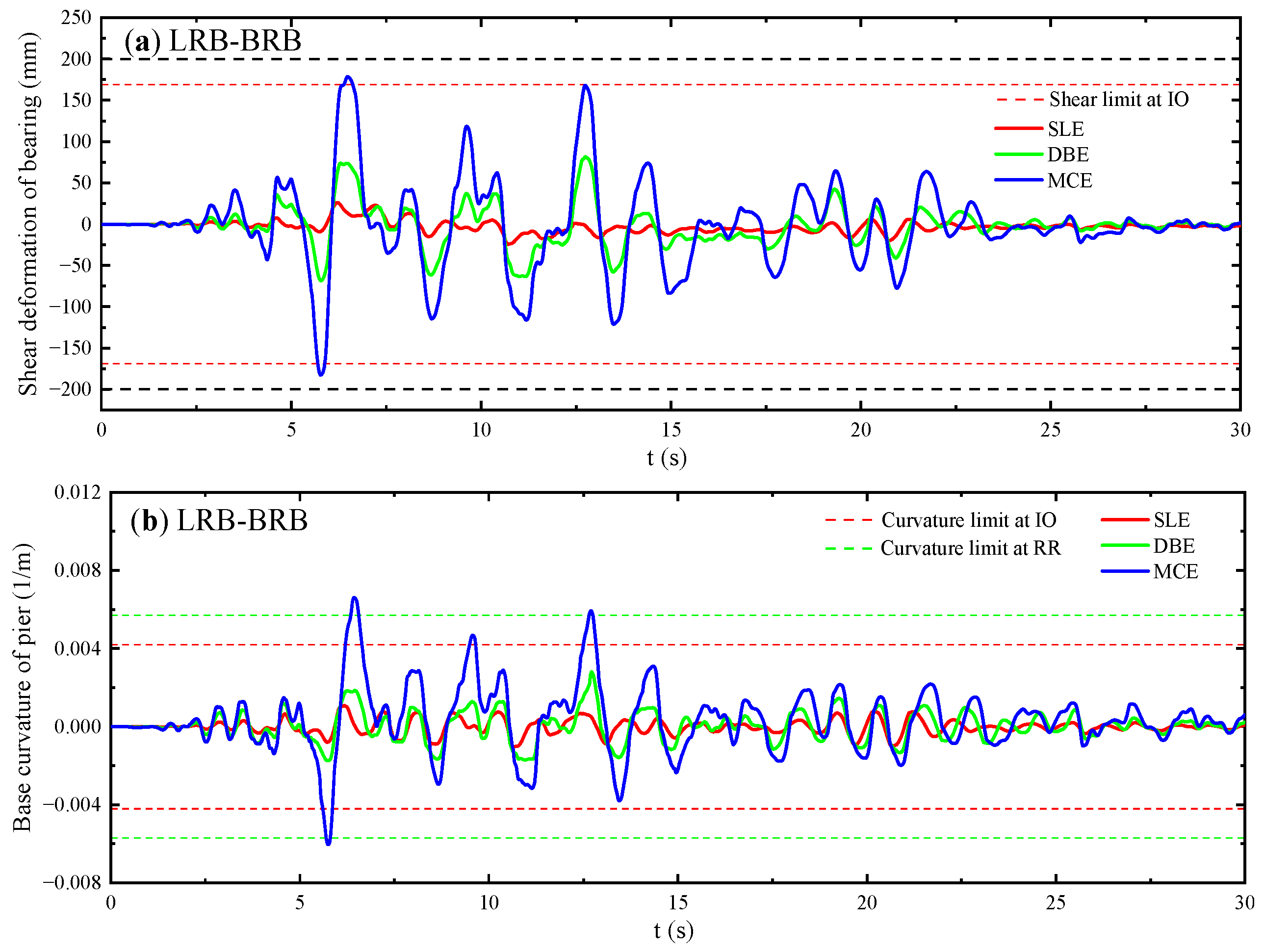
- The energy-based preliminary design may not achieve all the target performances under the practical ground motions that are spectrally matched to the code-specified seismic levels. However, the hybrid RB–BRB and LRB–BRB isolation systems show a two-phase energy dissipation behavior.
- (3)
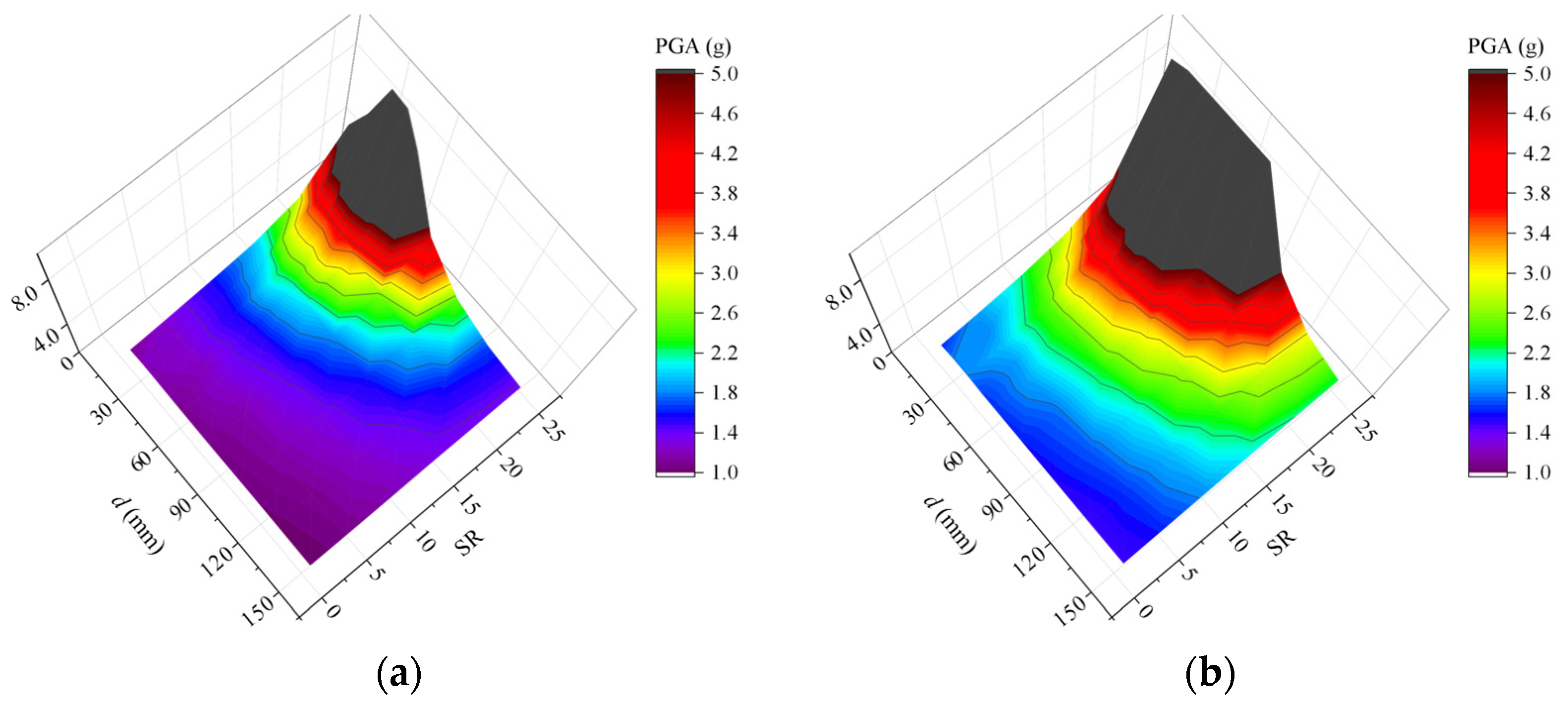
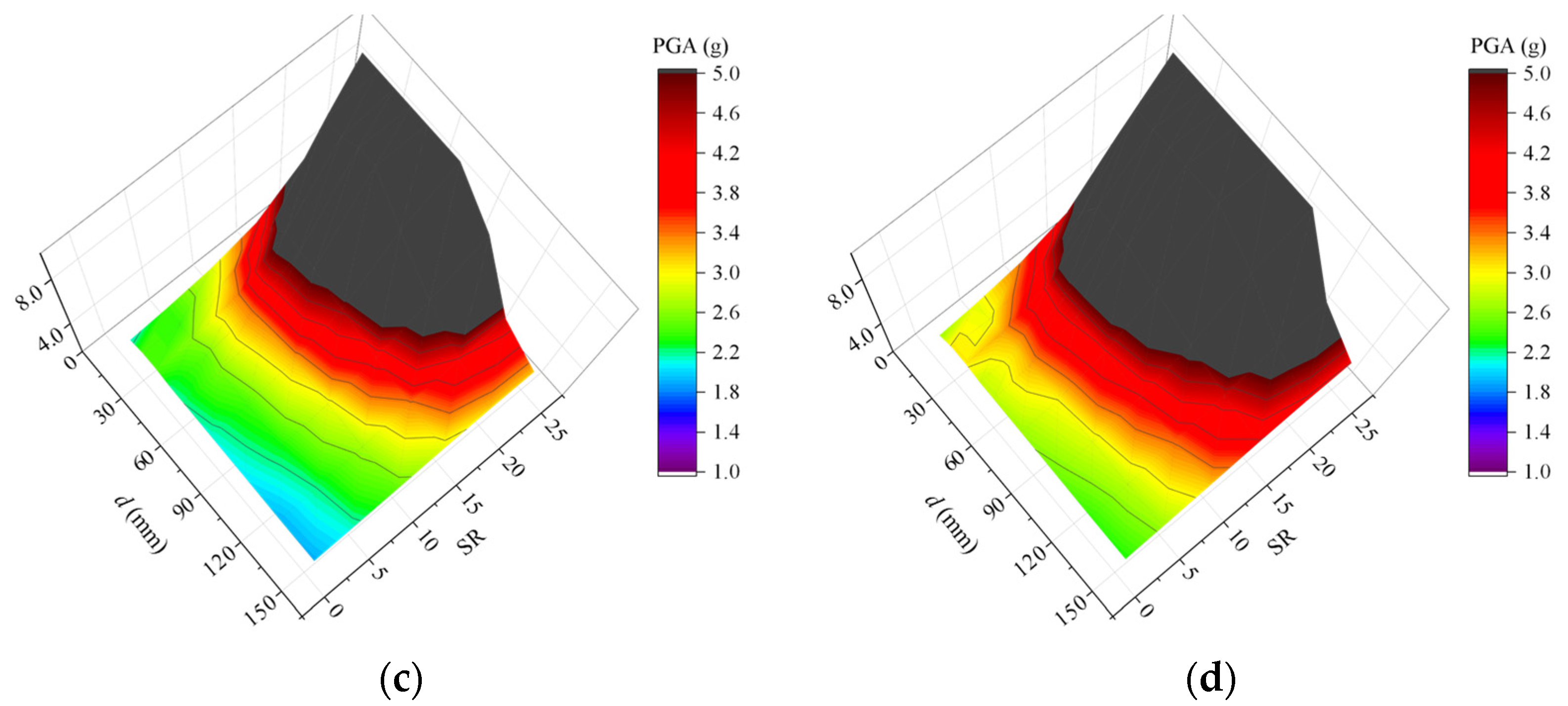
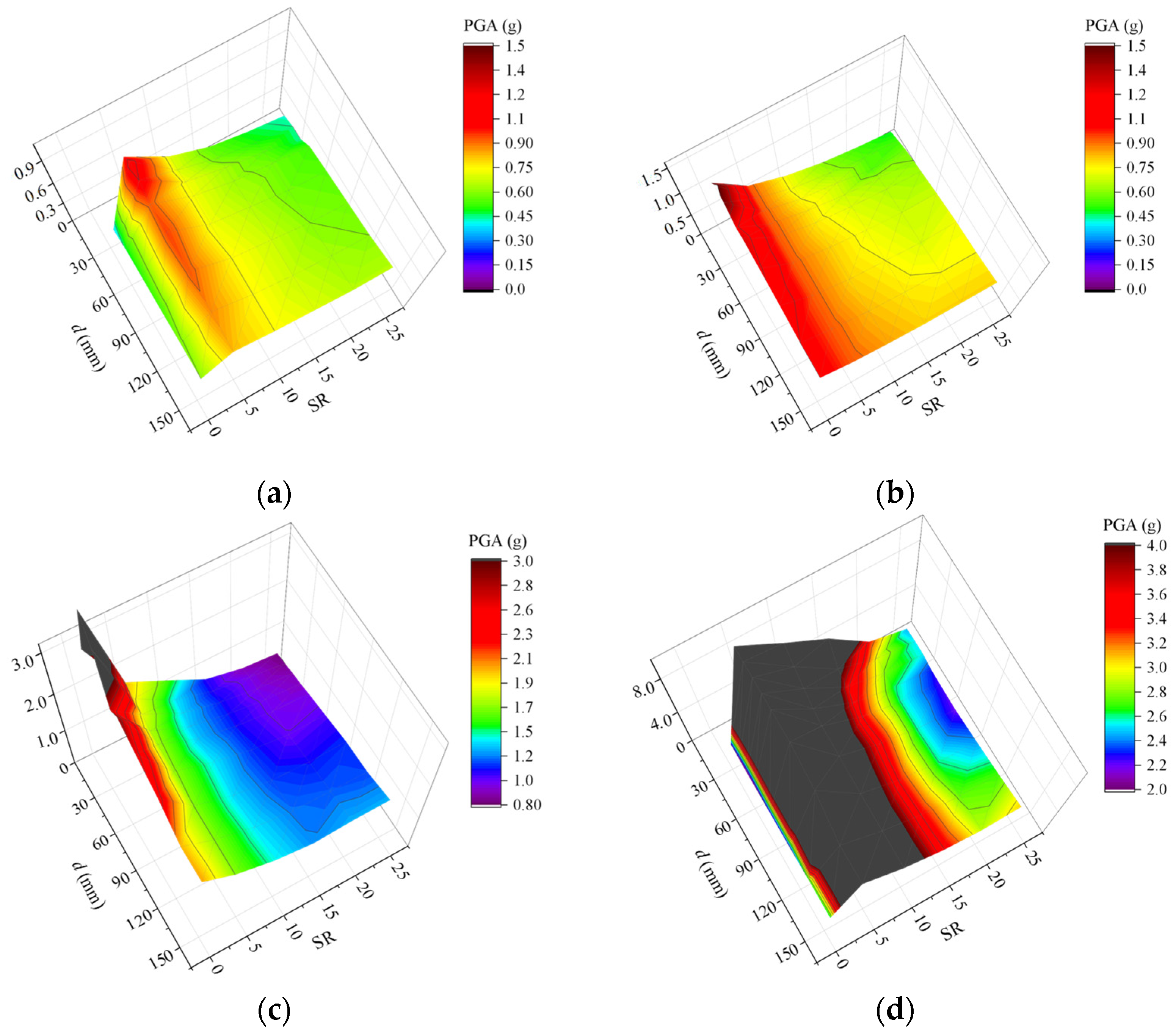
- The fragility curves for the bearing shear strain and base curvature ductility show different dependencies on the SR and d at different damage states. The seismic performance of the bridge system can be adjusted by considering the fragilities of the bearing and pier simultaneously, which is dependent on the stiffness ratio (SR) of the BRB to the pier and the gap spacing (d).
- (4)
- Two crucial design parameters, SR and d, can be tuned to reduce the failure probability of a bearing-supported bridge. Based on the fragility analyses, a performance-based seismic design of a bridge with LRB–BRB can be optimized and validated to achieve better performance by tuning the SR and d.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hashimoto, S.; Fujino, Y.; Abe, M. Damage analysis of Hanshin expressway viaducts during 1995 Kobe earthquake. II: Damage mode of single reinforced concrete piers. J. Bridge Eng. 2005, 10, 54–60. [Google Scholar] [CrossRef]
- Han, Q.; Du, X.; Liu, J.; Li, Z.; Li, L.; Zhao, J. Seismic damage of highway bridges during the 2008 Wenchuan earthquake. Earthq. Eng. Eng. Vib. 2009, 8, 263–273. [Google Scholar] [CrossRef]
- Schanack, F.; Valdebenito, G.; Alvial, J. Seismic damage to bridges during the 27 February 2010 magnitude 8.8 Chile earthquake. Earthq. Spectra 2012, 28, 301–315. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Sun, X. Base-isolated FCC building: Impact response in Northridge earthquake. J. Struct. Eng.-ASCE 2001, 127, 1063–1075. [Google Scholar] [CrossRef] [Green Version]
- Filipov, E.T.; Fahnestock, L.A.; Steelman, J.S.; Hajjar, J.F.; LaFave, J.M. Evaluation of quasi-isolated seismic bridge behavior using nonlinear bearing models. Eng. Struct. 2013, 49, 168–181. [Google Scholar] [CrossRef]
- Zheng, W.; Wang, H.; Li, J.; Shen, H. Parametric study of superelastic-sliding LRB system for seismic response control of continuous bridges. J. Bridge Eng. 2020, 25, 04020062. [Google Scholar] [CrossRef]
- Shi, Q.X.; Wang, F.; Wang, P.; Chen, K. Experimental and numerical study of the seismic performance of an all-steel assembled Q195 low-yield buckling-restrained brace. Eng. Struct. 2018, 176, 481–499. [Google Scholar] [CrossRef]
- Kim, D.H.; Ju, Y.K.; Kim, M.H.; Kim, S.D. Wind-induced vibration control of tall buildings using hybrid buckling-restrained braces. Struct. Des. Tall Spec. Build. 2014, 23, 549–562. [Google Scholar] [CrossRef]
- Li, C.; Liu, Y.; Li, H.N. Fragility assessment and optimum design of a steel–concrete frame structure with hybrid energy-dissipated devices under multi-hazards of earthquake and wind. Eng. Struct. 2021, 245, 112878. [Google Scholar] [CrossRef]
- Marshall, J.D.; Charney, F.A. Seismic response of steel frame structures with hybrid passive control systems. Earthq. Eng. Struct. Dyn. 2012, 41, 715–733. [Google Scholar] [CrossRef]
- Dong, H.; Du, X.; Han, Q.; Hao, H.; Bi, K.; Wang, X. Performance of an innovative self-centering buckling restrained brace for mitigating seismic responses of bridge structures with double-column piers. Eng. Struct. 2017, 148, 47–62. [Google Scholar] [CrossRef]
- Chen, R.; Qiu, C.; Hao, D. Seismic response analysis of multi-story steel frames using BRB and SCB hybrid bracing system. Appl. Sci. 2019, 10, 284. [Google Scholar] [CrossRef] [Green Version]
- Priestley, M.J.N.; Calvi, G.M.; Kowalsky, M.J. Direct displacement-based seismic design of structures. J. Earthq. Eng. 2005, 9, 257–278. [Google Scholar]
- Xiang, N.; Alam, M.S. Displacement-based seismic design of bridge bents retrofitted with various bracing devices and their seismic fragility assessment under near-fault and far-field ground motions. Soil. Dyn. Earthq. Eng. 2019, 119, 75–90. [Google Scholar] [CrossRef]
- Calvi, G.M.; Kingsley, G.R. Displacement-based seismic design of multi-degree-of-freedom bridge structures. Earthq. Eng. Struct. Dyn. 1995, 24, 1247–1266. [Google Scholar] [CrossRef]
- Yang, T.Y.; Tung, D.P.; Li, Y. Equivalent energy design procedure for earthquake resilient fused structures. Earthq. Spectra 2018, 34, 795–815. [Google Scholar] [CrossRef]
- Sadeghi, M.A.; Yang, T.Y.; Bagatini-Cachuço, F.; Pan, S. Seismic design and performance evaluation of controlled rocking dual-fused bridge system. Eng. Struct. 2020, 212, 110467. [Google Scholar] [CrossRef]
- Guo, W.; Du, Q.; Huang, Z.; Gou, H.; Xie, X.; Li, Y. An improved equivalent energy-based design procedure for seismic isolation system of simply supported bridge in China’s high-speed railway. Soil Dyn. Earthq. Eng. 2020, 134, 106161. [Google Scholar] [CrossRef]
- Takewaki, I.; Yoshitomi, S.; Uetani, K.; Tsuji, M. Non-monotonic optimal damper placement via steepest direction search. Earthq. Eng. Struct. Dyn. 1999, 28, 655–670. [Google Scholar] [CrossRef]
- Ozbulut, O.E.; Roschke, P.N.; Lin, P.Y.; Loh, C.H. GA-based optimum design of a shape memory alloy device for seismic response mitigation. Smart Mater. Struct. 2010, 19, 065004. [Google Scholar] [CrossRef]
- Pang, Y.; Sun, Y.; Zhong, J. Resilience-based performance and design of SMA/sliding bearing isolation system for highway bridges. Bull. Earthq. Eng. 2021, 19, 6187–6211. [Google Scholar] [CrossRef]
- Zhang, J.; Huo, Y. Evaluating effectiveness and optimum design of isolation devices for highway bridges using the fragility function method. Eng. Struct. 2009, 31, 1648–1660. [Google Scholar] [CrossRef]
- Montazeri, M.; Amiri, G.G.; Namiranian, P. Seismic fragility and cost-benefit analysis of a conventional bridge with retrofit implements. Soil Dyn. Earthq. Eng. 2021, 141, 106456. [Google Scholar] [CrossRef]
- McKenna, F.; Scott, M.H.; Fenves, G.L. Nonlinear finite-element analysis software architecture using object composition. J. Comput. Civ. Eng. 2010, 24, 95–107. [Google Scholar] [CrossRef]
- Filippou, F.C.; Popov, E.P.; Bertero, V.V. Effects of Bond Deterioration on Hysteretic Behavior of Reinforced Concrete Joints; Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 1983. [Google Scholar]
- Scott, B.D.; Park, R.; Priestley, M.J.N. Stress-strain behavior of concrete confined by overlapping hoops at low and high strain rates. J. Proc. 1982, 79, 13–27. [Google Scholar]
- Susantha, K.A.S.; Ge, H.; Usami, T. Uniaxial stress–strain relationship of concrete confined by various shaped steel tubes. Eng. Struct. 2001, 23, 1331–1347. [Google Scholar] [CrossRef]
- CCCC Highway Consultants Co., Ltd. Series of Elastomeric Pad Bearings for Highway Bridges (JTJ 663-2006); People’s Communications Publishing: Beijing, China, 2007. [Google Scholar]
- Liu, Q.; Zhu, S.; Yu, W.; Wu, X.; Song, F.; Ren, X. Ground motion frequency insensitivity of bearing-supported pedestrian bridge with viscous dampers. KSCE J. Civ. Eng. 2021, 25, 2662–2673. [Google Scholar] [CrossRef]
- Anand, V.; Kumar, S.R.S. Seismic soil-structure interaction: A state-of-the-art review. Structures 2018, 16, 317–326. [Google Scholar] [CrossRef]
- Mylonakis, G.; Gazetas, G. Seismic soil-structure interaction: Beneficial or detrimental? J. Earthq. Eng. 2000, 4, 377–401. [Google Scholar] [CrossRef]
- Badry, P.; Satyam, N. Seismic soil structure interaction analysis for asymmetrical buildings supported on piled raft for the 2015 Nepal earthquake. J. Asian Earth Sci. 2017, 133, 102–113. [Google Scholar] [CrossRef]
- FEMA. Quantification of Building Seismic Performance Factors, in FEMA P695; Applied Technology Council Federal Emergency Management Agency: Washington, DC, USA, 2009. [Google Scholar]
- PEER. Pacific Earthquake Engineering Research Center-Strong Ground Motion Database; University of California, Berkeley: Berkeley, CA, USA, 2017. [Google Scholar]
- Al, A.L.; Abrahamson, N. An improved method for nonstationary spectral matching. Earthq. Spectra 2010, 26, 601–617. [Google Scholar]
- Yang, Y.; Lu, H.; Tan, X.; Chai, H.K.; Wang, R.; Zhang, Y. Fundamental mode shape estimation and element stiffness evaluation of girder bridges by using passing tractor-trailers. Mech. Syst. Signal. Proc. 2022, 169, 108746. [Google Scholar] [CrossRef]
- Ministry of Housing and Urban-Rural Development of the People’s Republic of China. Code for Seismic Design of Highways and Bridges (JTG/T2231-2020); China Architecture & Building Press: Beijing, China, 2010. [Google Scholar]
- Chadwell, C.B.; Imbsen, R.A. XTRACT: A Tool for Axial Force—Ultimate Curvature Interactions. In Structures 2004: Building on the Past, Securing the Future; American Society of Civil Engineers: Reston, VA, USA, 2004. [Google Scholar]
- Shome, N.; Cornell, C.A.; Bazzurro, P.; Carballo, J.E. Earthquakes, records, and nonlinear responses. Earthq. Spectra 1998, 14, 469–500. [Google Scholar] [CrossRef]
- Nielson, B.G. Analytical Fragility Curves for Highway Bridges in Moderate Seismic Zones; Georgia Institute of Technology: Atlanta, GA, USA, 2005. [Google Scholar]
- Cornell, C.A.; Jalayer, F.; Hamburger, R.O.; Foutch, D.A. Probabilistic basis for 2000 SAC federal emergency management agency steel moment frame guidelines. J. Struct. Eng. 2002, 128, 526–533. [Google Scholar] [CrossRef] [Green Version]
- Department of Homeland Security Federal Emergency Management Agency. Multi-Hazard Loss Estimation Methodology: Earthquake Model; in HAZUS-MH MR5; Federal Emergency Management Agency: Washington, DC, USA, 2011. [Google Scholar]
- Yang, Y.; Ling, Y.; Tan, X.; Wang, S.; Wang, R. Damage identification of frame structure based on approximate Metropolis–Hastings algorithm and probability density evolution method. Int. J. Struct. Stab. Dyn. 2022, 22, 2240014. [Google Scholar] [CrossRef]
- Nielson, B.G.; DesRoches, R. Seismic fragility methodology for highway bridges using a component level approach. Earthq. Eng. Struct. Dyn. 2007, 36, 823–839. [Google Scholar] [CrossRef]
- Padgett, J.E.; Nielson, B.G.; DesRoches, R. Selection of optimal intensity measures in probabilistic seismic demand models of highway bridge portfolios. Earthq. Eng. Struct. Dyn. 2008, 37, 711–725. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Isolation System | RB | LRB | BRB | Gap | ||
|---|---|---|---|---|---|---|
| Shear Stiffness (kN/m) | Shear Stiffness (kN/m) | Post-Yielding Stiffness (kN/m) | Yielding Strength (kN/m) | Steel Core Area (mm2) | d (mm) | |
| RB | 2185 | |||||
| LRB | 6200 | 1000 | ||||
| RB–BRB | 2185 | 185 | 500 | 35 | ||
| LRB–BRB | 6200 | 1000 | 185 | 500 | 35 | |
| No. | Earthquake | Year | Station | Magnitude | Vs_30 (m/s) | PGA (g) | PGV (cm/s) |
|---|---|---|---|---|---|---|---|
| FF1 | Northridge | 1994 | Beverly Hills | 6.69 | 355.81 | 0.42 | 63 |
| FF2 | Northridge | 1994 | Canyon Country | 6.69 | 325.6 | 0.41 | 45 |
| FF3 | Imperial Valley | 1979 | El Centro Array #11 | 6.53 | 196.25 | 0.36 | 42 |
| FF4 | Kocaeli, Turkey | 1999 | Duzce | 7.5 | 276 | 0.31 | 59 |
| FF5 | Landers | 1992 | Yermo Fire Station | 7.3 | 354 | 0.24 | 52 |
| FF6 | Chi-Chi, Taiwan | 1999 | CHY101 | 7.6 | 259 | 0.35 | 115 |
| FF7 | Friuli, Italy | 1976 | Tolmezzo | 6.5 | 425 | 0.35 | 31 |
| No. | Earthquake | Year | Station | Magnitude | Vs_30 (m/s) | PGA (g) | PGV (cm/s) |
|---|---|---|---|---|---|---|---|
| NF1 | Imperial Valley-06 | 1979 | Chihuahua | 6.53 | 242.05 | 0.28 | 30.5 |
| NF2 | Loma Prieta | 1989 | BRAN | 6.93 | 476.54 | 0.64 | 55.9 |
| NF3 | Cape Mendocino | 1992 | Cape Mendocino | 7.0 | 514 | 1.43 | 119.5 |
| NF4 | Northridge-01 | 1994 | LA-Sepulveda VA | 6.7 | 380 | 0.73 | 70.1 |
| NF5 | Kocaeli, Turkey | 1999 | Yarimca | 7.5 | 297 | 0.31 | 73 |
| NF6 | Chi-Chi, Taiwan | 1999 | TCU084 | 7.6 | 553 | 1.16 | 115.1 |
| NF7 | Denali, Alaska | 2002 | TAPS Pump Sta. #10 | 7.9 | 553 | 0.33 | 126.4 |
| No. | Earthquake | Year | Station | Magnitude | Vs_30 (m/s) | PGA (g) | PGV (cm/s) |
|---|---|---|---|---|---|---|---|
| PNF1 | Irpinia, Italy-01 | 1980 | Sturno | 6.9 | 382 | 0.31 | 45.5 |
| PNF2 | Erzican, Turkey | 1992 | Erzincan | 6.69 | 352.05 | 0.49 | 95.5 |
| PNF3 | Landers | 1992 | Lucerne | 7.3 | 685 | 0.79 | 140.3 |
| PNF4 | Northridge-01 | 1994 | Rinaldi Receiving Sta | 6.7 | 282 | 0.87 | 167.3 |
| PNF5 | Northridge-01 | 1994 | Sylmar-Olive View | 6.7 | 441 | 0.73 | 122.8 |
| PNF6 | Kocaeli, Turkey | 1999 | Izmit | 7.5 | 811 | 0.22 | 29.8 |
| PNF7 | Duzce, Turkey | 1999 | Duzce | 7.1 | 276 | 0.52 | 79.3 |
| Isolation System | T1 (s) | T2 (s) | T3 (s) |
|---|---|---|---|
| RB | 1.2602 | 1.1879 | 0.9304 |
| LRB | 0.9771 | 0.8624 | 0.7146 |
| RB–BRB | 1.2603 | 1.1887 | 0.9304 |
| LRB–BRB | 0.9770 | 0.8612 | 0.7146 |
| Earthquake Intensity | Performance Objective | Bearing Shear Strain | Base Curvature Ductility |
|---|---|---|---|
| SLE | IO | γ < 100% | µ < 1.000 (φ0 < φy) |
| DBE | RR | γ < 150% | µ < 1.357 (φ0 < φe) |
| MCE | CP | γ < 200% | µ < 3.167 (φ0 < φm) |
| Steel Tubes | Fy (kN) | E0 (Pa) | b | R0 | R1 | R2 |
|---|---|---|---|---|---|---|
| Limb & column | 3.55 × 105 | 2.06 × 1011 | 0.01 | 18 | 0.925 | 0.15 |
| Bridge Component | fc′ (Pa) | fcc′ (Pa) | εcc | αfcc′ (Pa) | εcu | ft (Pa) | Ets (Pa) | λ |
|---|---|---|---|---|---|---|---|---|
| Limb | 2.34 × 107 | 4.20 × 107 | 0.0100 | 8.40 × 106 | 0.025 | 4.20 × 106 | 1.17 × 1010 | 0.1 |
| Column | 2.34 × 107 | 3.82 × 107 | 0.0083 | 7.64 × 106 | 0.025 | 3.82 × 106 | 1.17 × 1010 | 0.1 |
| Bridge Component | Damage Index | Slight | Moderate | Extensive | Complete | ||||
|---|---|---|---|---|---|---|---|---|---|
| Sc | βc | Sc | βc | Sc | βc | Sc | βc | ||
| Bearing | Shear strain | 100% | 0.25 | 150% | 0.25 | 200% | 0.47 | 250% | 0.47 |
| Pier | Base curvature ductility | 1.000 | 0.13 | 1.357 | 0.27 | 3.167 | 0.32 | 14.024 | 0.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Guo, Z.; Zhu, S.; Wang, C.; Ren, X.; Wu, X. Performance-Based Seismic Design of Hybrid Isolation Systems with Gap-Tunable BRBs for Bearing-Supported Bridges. Symmetry 2022, 14, 1373. https://doi.org/10.3390/sym14071373
Liu Q, Guo Z, Zhu S, Wang C, Ren X, Wu X. Performance-Based Seismic Design of Hybrid Isolation Systems with Gap-Tunable BRBs for Bearing-Supported Bridges. Symmetry. 2022; 14(7):1373. https://doi.org/10.3390/sym14071373
Chicago/Turabian StyleLiu, Qunfeng, Zhaoyang Guo, Shimin Zhu, Chang Wang, Xiang Ren, and Xing Wu. 2022. "Performance-Based Seismic Design of Hybrid Isolation Systems with Gap-Tunable BRBs for Bearing-Supported Bridges" Symmetry 14, no. 7: 1373. https://doi.org/10.3390/sym14071373
APA StyleLiu, Q., Guo, Z., Zhu, S., Wang, C., Ren, X., & Wu, X. (2022). Performance-Based Seismic Design of Hybrid Isolation Systems with Gap-Tunable BRBs for Bearing-Supported Bridges. Symmetry, 14(7), 1373. https://doi.org/10.3390/sym14071373