
Interval Modeling for Gamma Process Degradation Model

Abstract
:1. Introduction
2. Interval Degradation Model
2.1. General Interval Degradation Model
2.2. Gamma Degradation Model
- with probability one;
- has independent increments; that is, and are independent, ;
- .
2.3. Random Effect Gamma Degradation Model Testing
2.4. Interval Gamma Degradation Model
3. Reliability of Interval Gamma Degradation Model
- The threshold value D is a fixed value . According to (6), the reliability of the Gamma-Random effect single point Gamma degradation model is
- When the threshold value D is a uniform distribution , the reliability of the Gamma-Uniform interval model is
- When the threshold value D is assumed to be a truncated normal distribution , the reliability of the Gamma-Normal interval model iswhere .
- When the threshold value D is a truncated exponential distribution , the reliability of the Gamma-Exponential interval model iswhere .
- When the threshold value D is a truncated Weibull distribution , the reliability of the Gamma-Weibull interval model iswhere .
- When the threshold value D is a truncated Gamma distribution , the reliability of the Gamma-Gamma interval model iswhere , is the CDF of .
- When the threshold value D is a fixed value , the reliability of the Uniform-Random effect single point Gamma degradation model iswhere is the CDF of .
- When the threshold value D is an uniform distribution , the reliability of the Uniform-Uniform interval model is
- When the threshold value D is a truncated normal distribution , the reliability of the Uniform-Normal interval model is
- When the threshold value D is a truncated exponential distribution , the reliability of the Uniform-Exponential interval model is
- When the threshold value D is a truncated Weibull distribution , the reliability of the Uniform-Weibull interval model is
- When the threshold value D is a truncated Gamma distribution , the reliability of the Uniform-Gamma interval model is
- When the threshold value D is a fixed value , the reliability of the Exponential-Random effect single point Gamma degradation model iswhere is CDF of F distribution with and 2 degrees of freedom.
- When threshold value D is an uniform distribution . The reliability of the Exponential-Uniform interval model is
- When the threshold value D is a truncated normal distribution , the reliability of the Exponential-Normal interval model is
- When the threshold value D is a truncated exponential distribution , the reliability of the Exponential-Exponential interval model is
- When the threshold value D is a truncated Weibull distribution , the reliability of the Exponential-Weibull interval model is
- When the threshold value D is a truncated Gamma distribution , the reliability of the Exponential-Gamma interval model is
- When the threshold value D is a fixed value , the reliability of the Weibull-Random effect single point Gamma degradation model iswhere is the CDF of .
- When the threshold value D is an uniform distribution , the reliability of the Weibull-Uniform interval model is
- When the threshold value D is a truncated normal distribution , the reliability of the Weibull-Normal interval model is
- When the threshold value D is a truncated exponential distribution , the reliability of the Weibull-Exponential interval model is
- When the threshold value D is a truncated Weibull distribution , the reliability of the Weibull-Weibull interval model is
- When threshold value D is a truncated Gamma distribution , the reliability of the Weibull-Gamma interval model is
- When the threshold value D is a fixed value , the reliability of the Normal-Random effect single point Gamma degradation model iswhere ,
- When the threshold value D is an uniform distribution , the reliability of the Normal-Uniform interval model is
- When the threshold value D is a truncated normal distribution , the reliability of the Normal-Normal interval model is
- When the threshold value D is a truncated exponential distribution , the reliability of the Normal-Exponential interval model is
- When the threshold value D is a truncated Weibull distribution , the reliability of the Normal-Weibull interval model is
- When the threshold value D is a truncated Gamma distribution , the reliability of the Normal-Gamma interval model is
4. Estimate Reliability for Interval Degradation Model
- Draw M random samples from density function .
- Draw N random samples from density function .
- For fixed t,
- Draw a random sample from density function , and obtain the degradation path .
- Draw a random sample from density function , and compute the lifetime .
- Repeat step 1 and 2 by N times, and obtain the lifetime .
- For fixed t, calculate the number of , and denote the result by , then the CDF of lifetime and reliability can be estimated by
5. Simulation Comparison Results
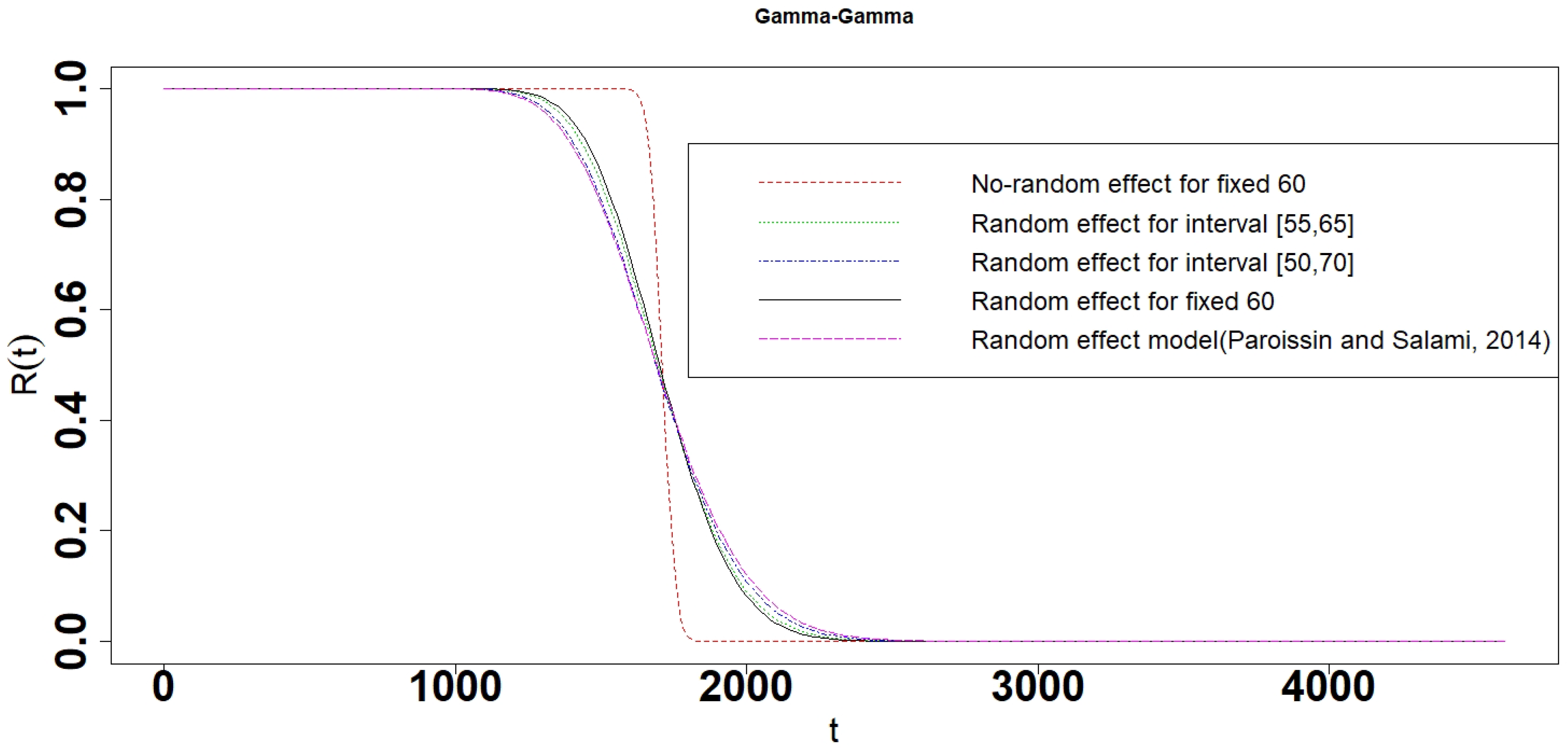
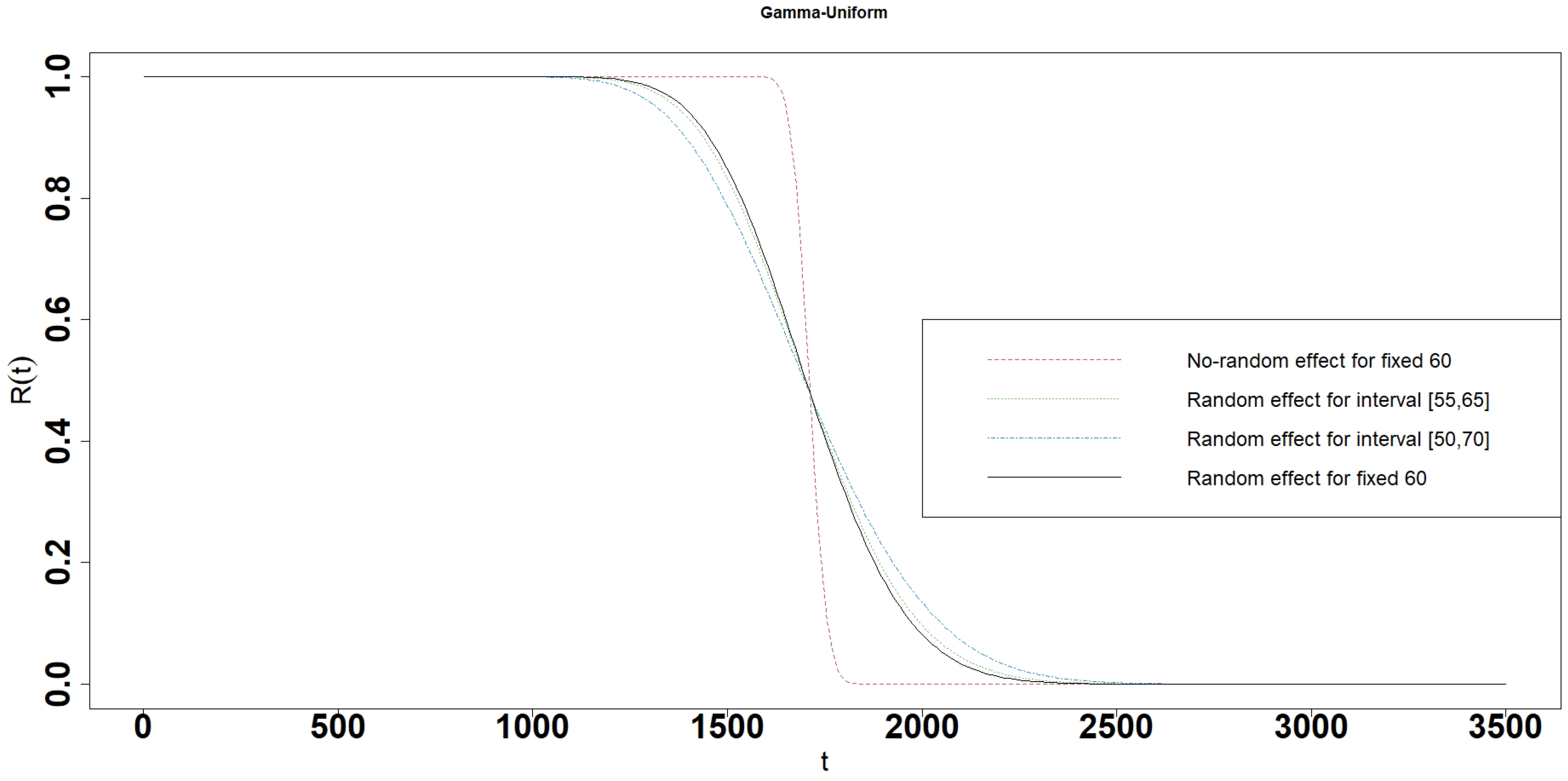
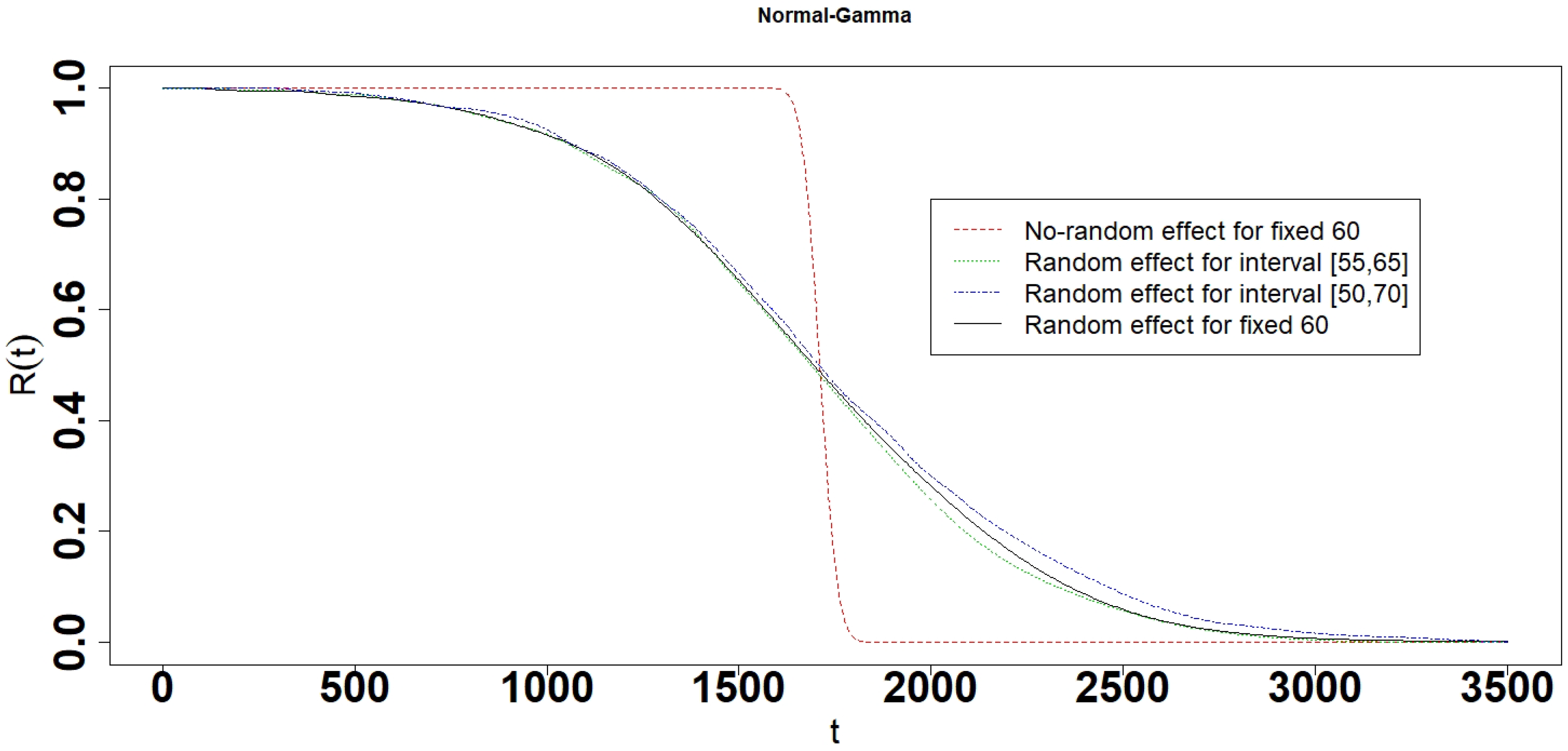
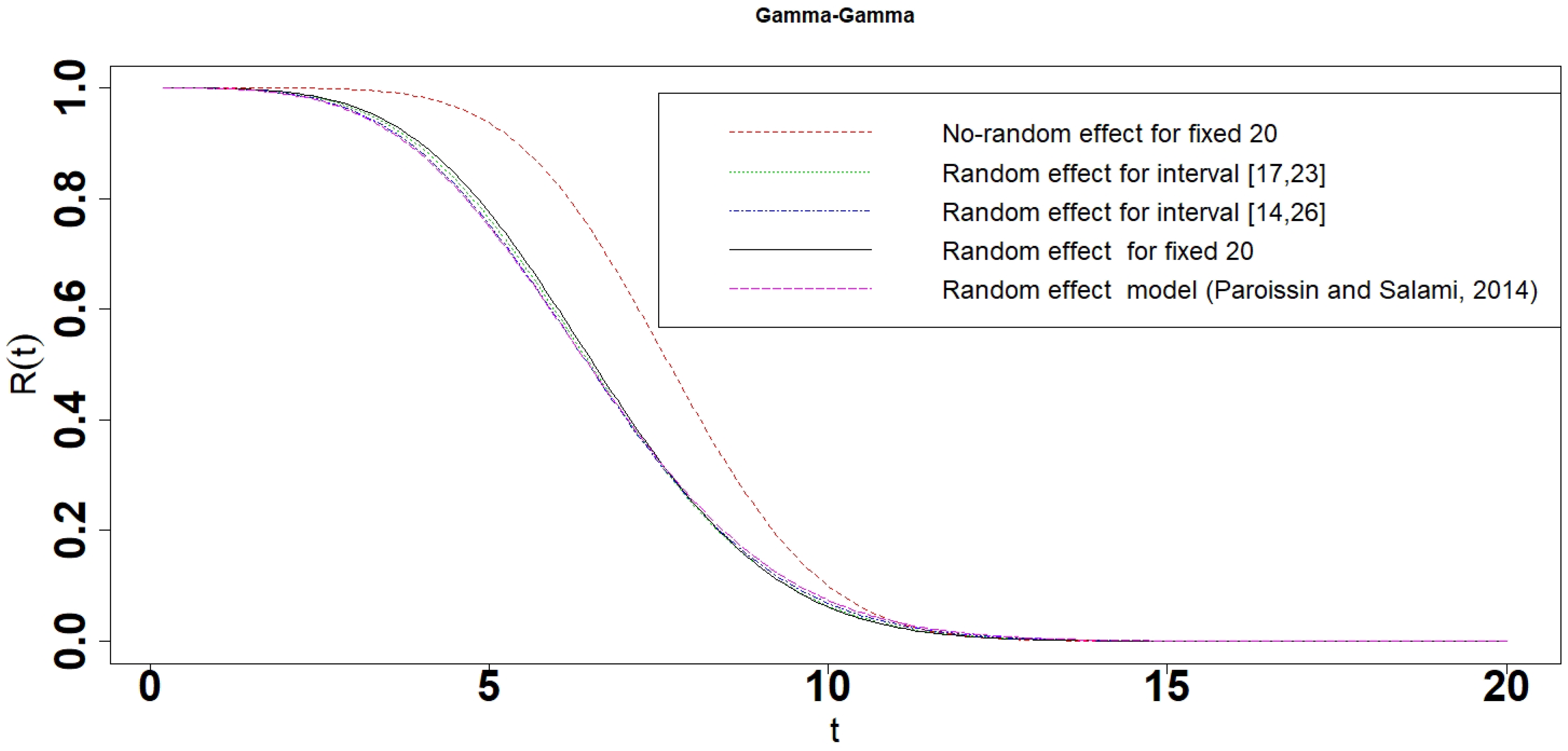
- The reliability, 10 percent lifetime, and 90 percent lifetime of the No-random effect model are significantly different from the random effect model and interval model. It suggests that the test of original data being random or non-random is critical before choosing the model to use.
- When the parameter follows exponential distribution, the reliabilities, 10 percent and 90 percent lifetime are almost the same in Random effect model and interval degradation models (Table 1 and Figure 12, Figure 13, Figure 14, Figure 15 and Figure 16). In other words, the Random effect single degradation model and Random effect interval degradation model are the same in such cases.
- The reliabilities, 10 percent and 90 percent lifetime of the random effect models except for the Exponential random effect model are a little different from the interval model. The differences of reliabilities, 10 percent and 90 percent lifetime between the random effect and interval models become larger, when the length of interval is increasing (Table 1 and Figure 3, Figure 4, Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11, Figure 12, Figure 13, Figure 14, Figure 15, Figure 16, Figure 17, Figure 18, Figure 19, Figure 20, Figure 21, Figure 22, Figure 23, Figure 24, Figure 25 and Figure 26).
- The mean lifetimes of the Normal random effect model, Normal-Y interval model, Gamma random effect model, Gamma-Y interval model, Uniform random effect model, and Uniform-Y interval model are almost the same as the No-random effect model. However, the mean lifetimes of the Exponential random effect model, Exponential-Y interval model, Weibull random effect model, and Weibull-Y interval model are quite different from the No-random effect model (Table 1). In other words, it needs to be more prudent to use the Exponential random effect model, Exponential-Y interval model, Weibull random effect model, and Weibull-Y interval model until having robust data to show that follows exponential distribution or Weibull distribution is compelling.
6. Real Data Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Ye, Z.S.; Xie, M. Stochastic modelling and analysis of degradation for highly reliable products. Appl. Stoch. Model. Bus. Ind. 2015, 31, 16–32. [Google Scholar] [CrossRef]
- Zhao, J.B.; Si, S.B.; Cai, Z.Q. A multi-objective reliability optimization for reconfigurable systems considering components degradation. Reliab. Eng. Syst. Saf. 2019, 183, 104–115. [Google Scholar] [CrossRef]
- Zhang, F.D.; Ng, H.K.T.; Shi, Y.M. Mis-specification analysis of Wiener degradation models by using f-divergence with outliers. Reliab. Eng. Syst. Saf. 2019, 195, 106751. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Si, X.S.; Hu, C.H.; Lei, Y. Degradation data analysis and remaining useful life estimation: A review on Wiener-process-based methods. Eur. J. Oper. Res. 2018, 271, 775–796. [Google Scholar] [CrossRef]
- Si, X.S.; Wang, W.B.; Hu, C.H.; Zhou, D.H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Peng, C.; Tseng, S. Mis-specification analysis of linear degradation models. IEEE Trans. Reliab. 2009, 58, 444–455. [Google Scholar] [CrossRef]
- Tang, S.J.; Guo, X.S.; Yu, C.Q.; Xue, H.J.; Zhou, Z.J. Accelerated degradation tests modeling based on the nonlinear Wiener process with random effects. Math. Probl. Eng. 2014, 2014, 560726. [Google Scholar] [CrossRef]
- Zhou, S.R.; Xu, A.C. Exponential Dispersion Process for Degradation Analysis. IEEE Trans. Reliab. 2019, 68, 398–409. [Google Scholar] [CrossRef]
- Ye, Z.S.; Chen, N. The inverse Gaussian process as a degradation model. Technometrics 2014, 56, 302–311. [Google Scholar] [CrossRef]
- Rodríguez-Picón, L.A.; Rodríguez-Picón, A.P.; Méndez-González, L.C.; Rodríguez-Borbón, M.I.; Alvarado-Iniesta, A. Degradation modeling based on gamma process models with random effects. Commun. Stat.-Simul. Comput. 2018, 47, 1796–1810. [Google Scholar] [CrossRef]
- Van Noortwijk, J.M. A survey of the application of gamma processes in maintenance. Reliab. Eng. Syst. Saf. 2009, 94, 2–21. [Google Scholar] [CrossRef]
- Ye, Z.S.; Chen, N.; Tsui, K.L. A Bayesian approach to condition monitoring with imperfect inspections. Qual. Reliab. Eng. Int. 2015, 31, 513–522. [Google Scholar] [CrossRef]
- Luo, C.L.; Shen, L.J.; Xu, A.C. Modelling and estimation of system reliability under dynamic operating environments and lifetime ordering constraints. Reliab. Eng. Syst. Saf. 2022, 218, 108136. [Google Scholar] [CrossRef]
- Xu, A.C.; Zhou, S.R.; Tang, Y.C. A unified model for system reliability evaluation under dynamic operating conditions. IEEE Trans. Reliab. 2021, 70, 65–72. [Google Scholar] [CrossRef]
- Singpurwalla, N.D. Survival in dynamic environments. Stat. Sci. 1995, 10, 86–103. [Google Scholar] [CrossRef]
- Lawless, J.; Crowder, M. Covariates and random effects in a gamma process model with application to degradation and failure. Lifetime Data Anal. 2004, 10, 213–227. [Google Scholar] [CrossRef] [PubMed]
- Park, C.; Padgett, W.J. Accelerated degradation models for failure based on geonmetric Brownian motion and gamma process. Lifetime Data Anal. 2005, 11, 511–527. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.B.; Carr, M.; Xu, W.J.; Kobbacy, K. A model for residual life prediction based on Brownian motion with an adaptive drift. Microelectron. Reliab. 2010, 51, 285–293. [Google Scholar] [CrossRef]
- Wei, M.H.; Chen, M.Y.; Zhou, D.H. Multi-sensor information based remaining useful life prediction with anticipated performance. IEEE Trans. Reliab. 2013, 62, 183–198. [Google Scholar] [CrossRef]
- Peng, W.; Coit, D.W. Reliability and degradation modeling with random or uncertain failure threshold. In Proceedings of the 2007 Annual Reliability and Maintainability Symposium, Orlando, FL, USA, 22–25 January 2007; pp. 392–397. [Google Scholar]
- Usynin, A.; Hines, J.W.; Urmanov, A. Uncertain failure thresholds in cumulative damage models. In Proceedings of the Reliability and Maintainability Symposium, Las Vegas, NV, USA, 28–31 January 2008; pp. 334–340. [Google Scholar]
- Huang, J.B.; Kong, D.J.; Cui, L.R. Bayesian reliability assessment and degradation modeling with calibrations and random failure threshold. J. Shanghai Jiaotong Univ. 2016, 21, 478–483. [Google Scholar] [CrossRef]
- Ma, Q.; An, Z.W.; Kou, H.X. degraded data modeling and an alysis method taking account of random failure threshold. J. Lanzhou Univ. Technol. 2017, 43, 40–46. [Google Scholar]
- Wang, Z.Z.; Chen, Y.X.; Cai, Z.Y.; Luo, C.K. Remaining useful lifetime prediction based on nonlinear degradation processes with random failure threshold. J. Natl. Univ. Def. Technol. 2020, 42, 177–185. [Google Scholar]
- Paroissin, C.; Salami, A. Failure time of non homogeneous gamma process. Commun. Stat.-Theory Methods 2014, 43, 3148–3161. [Google Scholar] [CrossRef]
- Kuitche, J.M. Statistical lifetime prediction for photovoltaic modules. In Proceedings of the Photovoltaic Module Reliability Workshop, Online, 18–19 February 2010. [Google Scholar]
- Guan, Q.; Tang, Y.C. Analysis and application of interval modeling for linear degradation path. Appl. Probab. Stat. 2018, 34, 427–440. [Google Scholar]
- Guan, Q.; Fu, Z.L. Analysis and application of exponential degradation paths with random failure thresholds. J. East China Norm. Univ. 2020, 1, 7–15. [Google Scholar]
- Chen, P.; Ye, Z.S. Estimation of field reliability based on aggregate lifetime data. Technometrics 2017, 59, 115–125. [Google Scholar] [CrossRef]
- Liu, W.D.; Wen, G.; Yan, W.A.; Luo, J.; Jiang, X.H. Field Lifetime Assessment of Photovoltaic Modules Based on Degradation Data-Driven and Nonlinear Gamma processes, Computer Integrated Manufacturing Systems. pp. 1–15. Available online: http://kns.cnki.net/kcms/detail/11.5946.TP.20200623.1542.040.html (accessed on 1 March 2022).
- Chen, P.; Ye, Z.S. Approximate statistical limits for a gamma distribution. J. Qual. Technol. 2017, 49, 64–77. [Google Scholar] [CrossRef]
- Jiang, L.; Feng, Q.; Coit, D.W. Modeling zoned shock effects on stochastic degradation in dependent failure processes. IIE Trans. 2015, 47, 460–470. [Google Scholar] [CrossRef]
- Fan, M.; Zeng, Z.; Zio, E. Modeling dependent competing failure processes with degradation-shock dependence. Reliab. Eng. Syst. Saf. 2017, 165, 422–430. [Google Scholar] [CrossRef]
- Fan, M.; Zeng, Z.; Zio, E.; Kang, R.; Chen, Y. A stochastic hybrid systems based framework for modeling dependent failure processes. PLoS ONE 2017, 12, e0172680. [Google Scholar] [CrossRef]
- Zaitseva, E.; Levashenko, V. Reliability analysis of multi-state system with application of multiple-valued logic. Int. J. Qual. Reliab. Manag. 2017, 34, 862–878. [Google Scholar] [CrossRef]
- Rauzy, A.; Yang, L. Finite Degradation Structures. FLAP 2019, 6, 1447–1474. [Google Scholar]
- Hu, J.; Chen, P. Predictive Maintenance of Systems Subject to Hard Failure Based on Proportional Hazards Model. Reliab. Eng. Syst. Saf. 2020, 196, 106707. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Mean Life Time | 10 Percent Life Time | 90 Percent Life Time |
|---|---|---|---|
| No random effect model | 1715 | 1662 | 1756 |
| Gamma random effect model | 1714 | 1452 | 1966 |
| Gamma-Uniform interval 55–60 | 1709 | 1428 | 1978 |
| Gamma-Uniform interval 50–70 | 1707 | 1381 | 2025 |
| Gamma-Normal interval 55–60 | 1716 | 1428 | 1990 |
| Gamma-Normal interval 50–70 | 1712 | 1381 | 2037 |
| Gamma-Exponential interval 55–60 | 1709 | 1428 | 1978 |
| Gamma-Exponential interval 50–70 | 1698 | 1381 | 2013 |
| Gamma-Weibull interval 55–60 | 1744 | 1452 | 2013 |
| Gamma-Weibull interval 50–70 | 1677 | 1358 | 2002 |
| Gamma-Gamma interval 55–60 | 1710 | 1428 | 1978 |
| Gamma-Gamma interval 50–70 | 1708 | 1405 | 2002 |
| Gamma-Gamma ([25]) | 1713 | 1393 | 2037 |
| Uniform random effect model | 1708 | 1288 | 2119 |
| Uniform-Uniform interval 55–60 | 1712 | 1288 | 2119 |
| Uniform-Uniform interval 50–70 | 1720 | 1276 | 2177 |
| Uniform-Normal interval 55–60 | 1710 | 1264 | 2130 |
| Uniform-Normal interval 50–70 | 1691 | 1241 | 2142 |
| Uniform-Exponential interval 55–60 | 1701 | 1264 | 2095 |
| Uniform-Exponential interval 50–70 | 1717 | 1253 | 2165 |
| Uniform-Weibull interval 55–60 | 1688 | 1264 | 2084 |
| Uniform-Weibull interval 50–70 | 1718 | 1276 | 2165 |
| Uniform-Gamma interval 55–60 | 1690 | 1264 | 2107 |
| Uniform-Gamma interval 50–70 | 1719 | 1253 | 2165 |
| Exponential random effect model | 1330 | 217 | 3643 |
| Exponential-Uniform interval 55–60 | 1329 | 217 | 3652 |
| Exponential-Uniform interval 50–70 | 1327 | 217 | 3679 |
| Exponential-Normal interval 55–60 | 1331 | 217 | 3661 |
| Exponential-Normal interval 50–70 | 1324 | 217 | 3652 |
| Exponential-Exponential interval 55–60 | 1327 | 217 | 3634 |
| Exponential-Exponential interval 50–70 | 1324 | 217 | 3652 |
| Exponential-Weibull interval 55–60 | 1326 | 217 | 3634 |
| Exponential-Weibull interval 50–70 | 1320 | 217 | 3625 |
| Exponential-Gamma interval 55–60 | 1328 | 217 | 3643 |
| Exponential-Gamma interval 50–70 | 1324 | 217 | 3634 |
| Weibull random effect model | 755 | 15 | 3752 |
| Weibull-Uniform interval 55–60 | 761 | 19 | 3950 |
| Weibull-Uniform interval 50–70 | 719 | 14 | 4500 |
| Weibull-Normal interval 55–60 | 781 | 10 | 4067 |
| Weibull-Normal interval 50–70 | 683 | 14 | 4500 |
| Weibull-Exponential interval 55–60 | 767 | 15 | 3865 |
| Weibull-Exponential interval 50–70 | 709 | 15 | 3689 |
| Weibull-Weibull interval 55–60 | 702 | 19 | 4500 |
| Weibull-Weibull interval 50–70 | 747 | 10 | 4351 |
| Weibull-Gamma interval 55–60 | 770 | 15 | 3968 |
| Weibull-Gamma interval 50–70 | 726 | 10 | 4247 |
| No random effect model | 1715 | 1662 | 1756 |
| Normal random effect model | 1691 | 898 | 2385 |
| Normal-Uniform interval 55–60 | 1703 | 1052 | 2343 |
| Normal-Uniform interval 50–70 | 1701 | 1024 | 2420 |
| Normal-Normal interval 55–60 | 1696 | 996 | 2357 |
| Normal-Normal interval 50–70 | 1675 | 982 | 2357 |
| Normal-Exponential interval 55–60 | 1702 | 968 | 2385 |
| Normal-Exponential interval 50–70 | 1679 | 996 | 2364 |
| Normal-Weibull interval 55–60 | 1665 | 982 | 2314 |
| Normal-Weibull interval 50–70 | 1666 | 982 | 2343 |
| Normal-Gamma interval 55–60 | 1687 | 1038 | 2314 |
| Normal-Gamma interval 50–70 | 1698 | 1017 | 2357 |
| Test Date | Time (Day) | Time (Year) | S70L45 | S72L46 | S73L47 | S71L48 |
|---|---|---|---|---|---|---|
| 9/24/1998 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3/23/1999 | 180 | 0.493 | 1.866 | 2.005 | 1.919 | 0.949 |
| 3/29/2000 | 552 | 1.512 | 1.433 | 1.693 | 1.868 | 0.358 |
| 3/30/2001 | 918 | 2.515 | 3.824 | 4.493 | 0.940 | 7.345 |
| 4/18/2002 | 1302 | 3.567 | 4.004 | 6.040 | 2.706 | 8.582 |
| 5/7/2003 | 1686 | 4.619 | 5.296 | 8.242 | 2.914 | 12.845 |
| 3/16/2004 | 2000 | 5.479 | 7.010 | 11.465 | 4.499 | 15.526 |
| 7/14/2005 | 2485 | 6.808 | 13.341 | 11.460 | 6.554 | 18.517 |
| 5/25/2006 | 2800 | 7.671 | 23.853 | 22.862 | 11.612 | 24.881 |
| 5/29/2007 | 3169 | 8.682 | 30.398 | 28.378 | 17.109 | 31.551 |
| Model | MLE of Parameters | p-Value |
|---|---|---|
| : No random effect | ||
| : Gamma random effect | 0.001 |
| Model | Mean Life | 10 Percent Life | 90 Percent Life |
|---|---|---|---|
| Time (Year) | Time (year) | Time (Year) | |
| No random effect nonlinear model ([30]) | 7.60 | * | * |
| No random effect linear model ([30]) | 6.80 | * | * |
| No random effect model | 7.71 | 5.38 | 9.96 |
| Gamma random effect model | 6.66 | 3.95 | 9.37 |
| Gamma-Uniform interval 17–23 | 6.67 | 3.89 | 9.43 |
| Gamma-Uniform interval 14–26 | 6.60 | 3.71 | 9.55 |
| Gamma-Normal interval 17–23 | 6.62 | 3.89 | 9.37 |
| Gamma-Normal interval 14–26 | 6.44 | 3.59 | 9.37 |
| Gamma-Exponential interval 17–23 | 6.56 | 3.83 | 9.31 |
| Gamma-Exponential interval 14–26 | 6.56 | 3.71 | 9.49 |
| Gamma-Weibull interval 17–23 | 6.75 | 3.95 | 9.55 |
| Gamma-Weibull interval 14–26 | 6.72 | 3.77 | 9.73 |
| Gamma-Gamma interval 17–23 | 6.63 | 3.89 | 9.37 |
| Gamma-Gamma interval 14–26 | 6.65 | 3.83 | 9.49 |
| Gamma-Gamma ([25]) | 6.63 | 3.83 | 9.54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Guan, Q.; Tang, Y.; Tzeng, Y. Interval Modeling for Gamma Process Degradation Model. Symmetry 2022, 14, 954. https://doi.org/10.3390/sym14050954
Liu G, Guan Q, Tang Y, Tzeng Y. Interval Modeling for Gamma Process Degradation Model. Symmetry. 2022; 14(5):954. https://doi.org/10.3390/sym14050954
Chicago/Turabian StyleLiu, Guihong, Qiang Guan, Yincai Tang, and Yunhuei Tzeng. 2022. "Interval Modeling for Gamma Process Degradation Model" Symmetry 14, no. 5: 954. https://doi.org/10.3390/sym14050954
APA StyleLiu, G., Guan, Q., Tang, Y., & Tzeng, Y. (2022). Interval Modeling for Gamma Process Degradation Model. Symmetry, 14(5), 954. https://doi.org/10.3390/sym14050954