
Bi-Matrix Games with General Intuitionistic Fuzzy Payoffs and Application in Corporate Environmental Behavior



Abstract
:1. Introduction
- It is efficacious and suitable to employ cut sets for managing the intuitionistic fuzzy preference, since it can maintain as much information as impossible. Although the existing ranking methods [25,26,27,28,30,31] of IFNs considered the concept of cut sets, the intuitionistic fuzzy preferences are directly converted into real numbers for comparison, which greatly reduces the advantage of considering intuitionistic fuzzy information. Moreover, it does not show the change of the Nash equilibrium value with respect to the cut sets.
- These methods [25,26,27,28,29,30,31] directly converted the intuitionistic fuzzy quadratic programming model into a crisp quadratic programming model via using different sorting functions. Such conversion would easily give rise to serious distortion of original information and may result in ill-advised outcomes.
- The existing works [25,26,27,28,29,30,31] on bi-matrix games ignored the player’s acceptance degree of the possible violation of intuitionistic fuzzy constraints. Actually, a few intuitionistic fuzzy constraints may be violated, while the player can still allow such a violation with certain acceptance degrees. Consequently, it is rational and essential to consider players’ acceptance degrees when solving intuitionistic fuzzy quadratic programming.
- 1.
- This paper provides a new way to tackle GIF information, which can preserve the information better. The proposed method can provide more detailed information regarding the Nash equilibrium value and the Nash equilibrium strategy, including the tendency of upper and lower bounds of the interval-type values of the and -bi-matrix games and players’ Nash equilibrium strategies at different levels.
- 2.
- 3.
- Full consideration of a player’s acceptance degree of the possible violation of GIF constraints makes the outcomes of bi-matrix games more in line with the actual situation. By adjusting various acceptance degrees, players can acquire different Nash equilibrium strategies and Nash equilibrium values, which improves the flexibility of players’ strategy choices greatly.
- 4.
- The proposed method can be adopted to solve the bi-matrix game with the special forms of GIFNs (e.g., crisp numbers, intervals, TrFNs, and IFNs). It has a wider range of applications and can be applied to a variety of practical game problems.
2. Preliminaries
2.1. IFN and Cut Sets
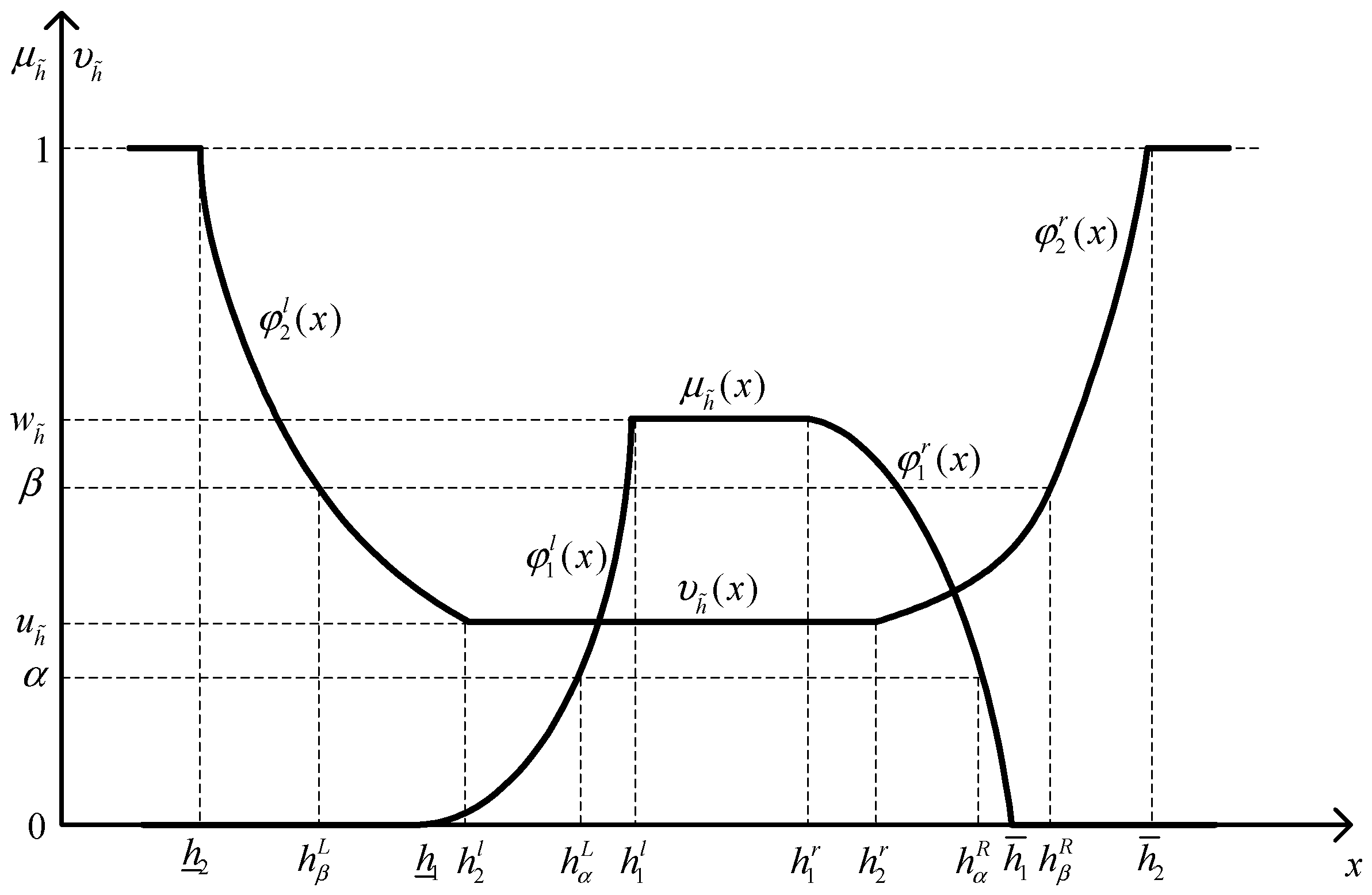
- There exist at least two real numberssuch thatand;
- is quasi concave and upper semi-continuous on;
- is quasi convex and lower semi-continuous on;
- The support setsandare bounded.
2.2. Order Relation for Intervals and Interval Objective Function
2.3. Classical Bi-Matrix Games
3. New General Intuitionistic Fuzzy Numbers (GIFNs) and Their Order Relation
3.1. A New GIFN
- 1.
- Addition:
- 2.
- Subtraction:
- 3.
- Multiplication:
- 4.
- Scalar multiplication:
3.2. Cut Sets of New GIFNs
3.3. Order Relation for New GIFNs
- iffand;
- iffand;
- iffand.
4. General Intuitionistic Fuzzy Bi-Matrix Games and Solution Method
4.1. General Intuitionistic Fuzzy Bi-Matrix Games (GIFBMG)
4.2. α-Bi-Matrix Games and β-Bi-Matrix Games of
4.3. A Novel Method to Solve GIFBMGs
5. Application of Strategy Choice in Corporate Environmental Behavior
5.1. Description of Strategy Choice Problem in Corporate Environmental Behavior
5.2. Results Obtained by the Proposed Method
- It can be found from Table 1 that the upper and lower bounds of the interval-type values of the and -bi-matrix games and players’ Nash equilibrium strategies can be obtained for different values of . It shows that the players can have more choices in the game process and make the decision-making process more flexible. The cut sets are used to handle the GIF preferences of players in the proposed method, which is an effective means for keeping as much information as possible.
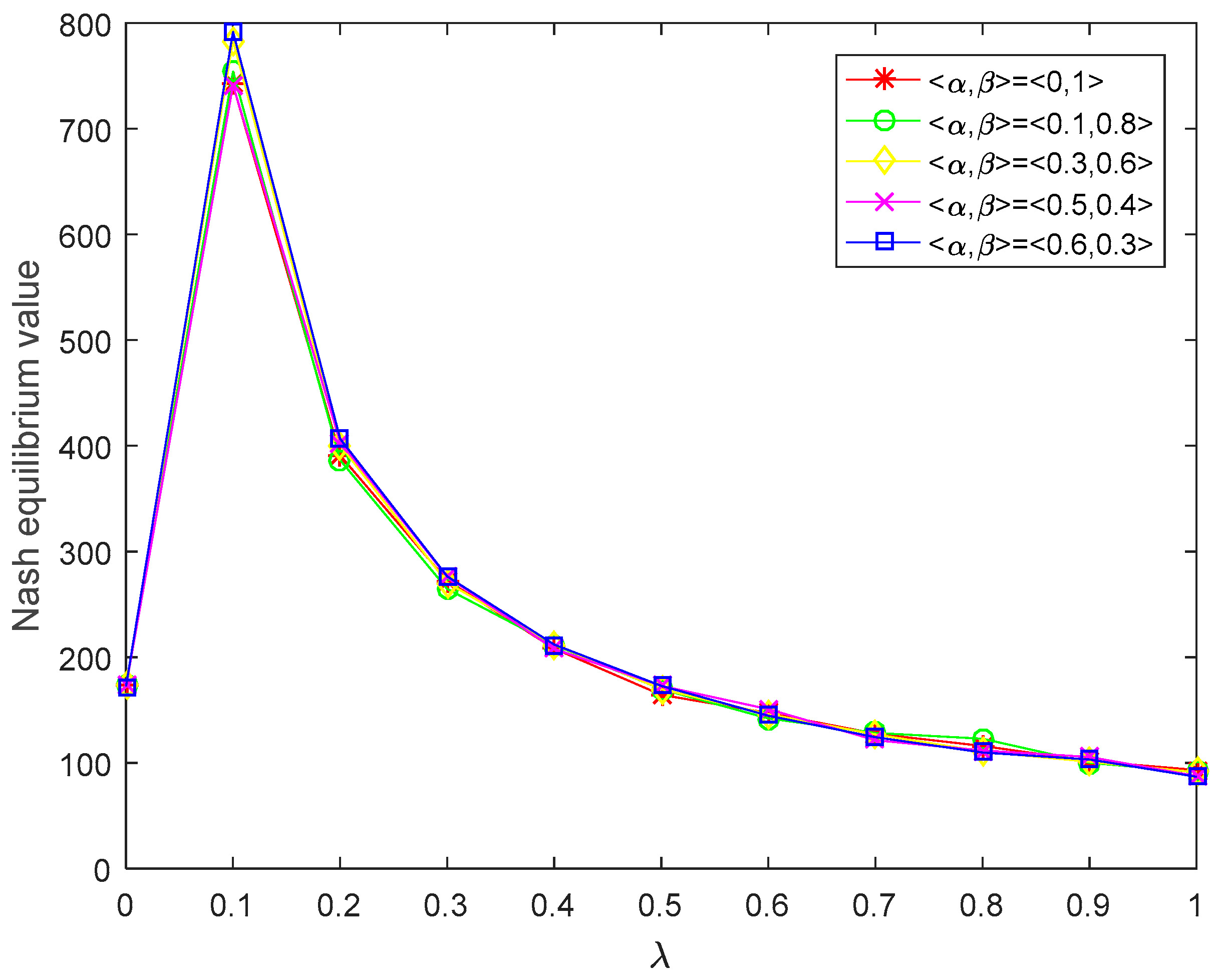
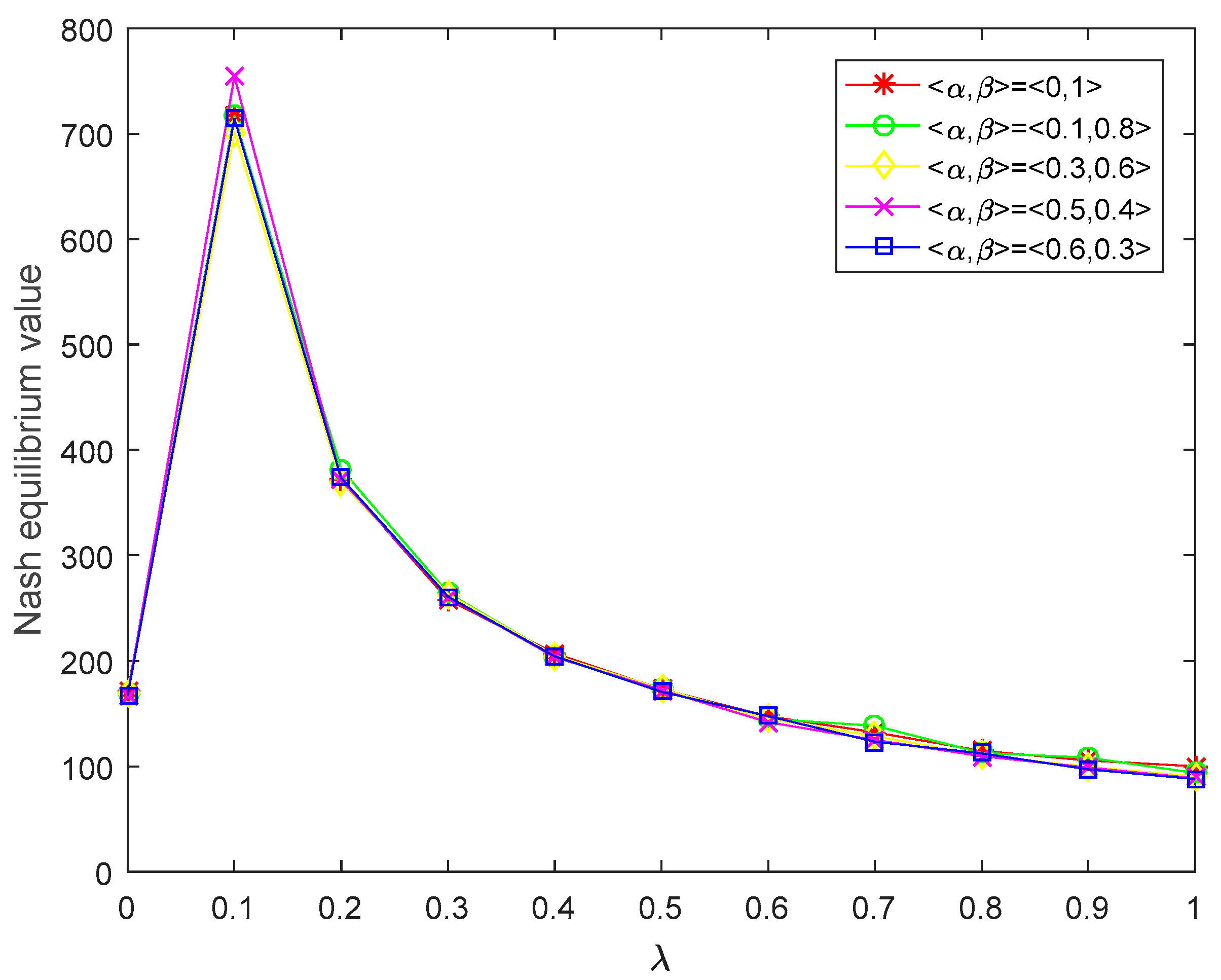
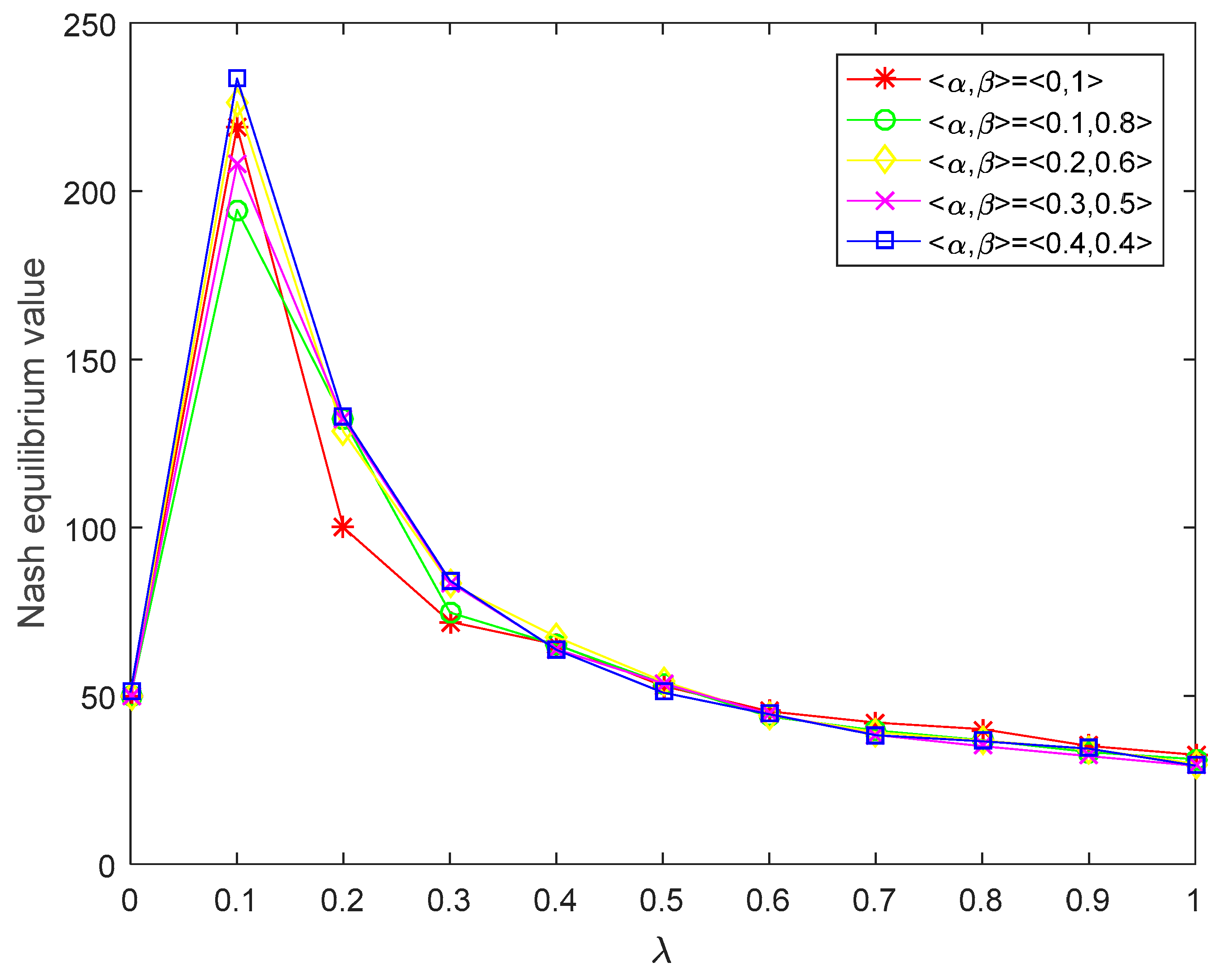
- Figure 2 and Figure 3 reveal that the Nash equilibrium values of players and increase with the increase in acceptance degree when , the Nash equilibrium values of players and decline with the increase in acceptance degree when . In the actual decision-making process, the more risk the player prefers, the higher the expected return. In other words, the players are willing to take greater risk in order to obtain higher benefits. Nevertheless, if players blindly pursue high risks too much, their returns will decline when a certain risk threshold is reached. It is easy to see from Figure 2 and Figure 3 that is the risk threshold. From the logical point of view, the results obtained in this paper are consistent with the reality and human intuition.
- Figure 2 and Figure 3 show that the Nash equilibrium values of players reach the maximum at the risk threshold (). When the risk tolerances of players are less than the risk threshold, the Nash equilibrium values of players are proportional to their own risk preference. When the risk tolerances of players are greater than the risk threshold, the Nash equilibrium values of players are inversely proportional to their own risk preference. If players blindly pursue high risks, their Nash equilibrium values will drop when a certain risk threshold is reached.
5.3. Comparative Analysis with Li and Yang’s Method
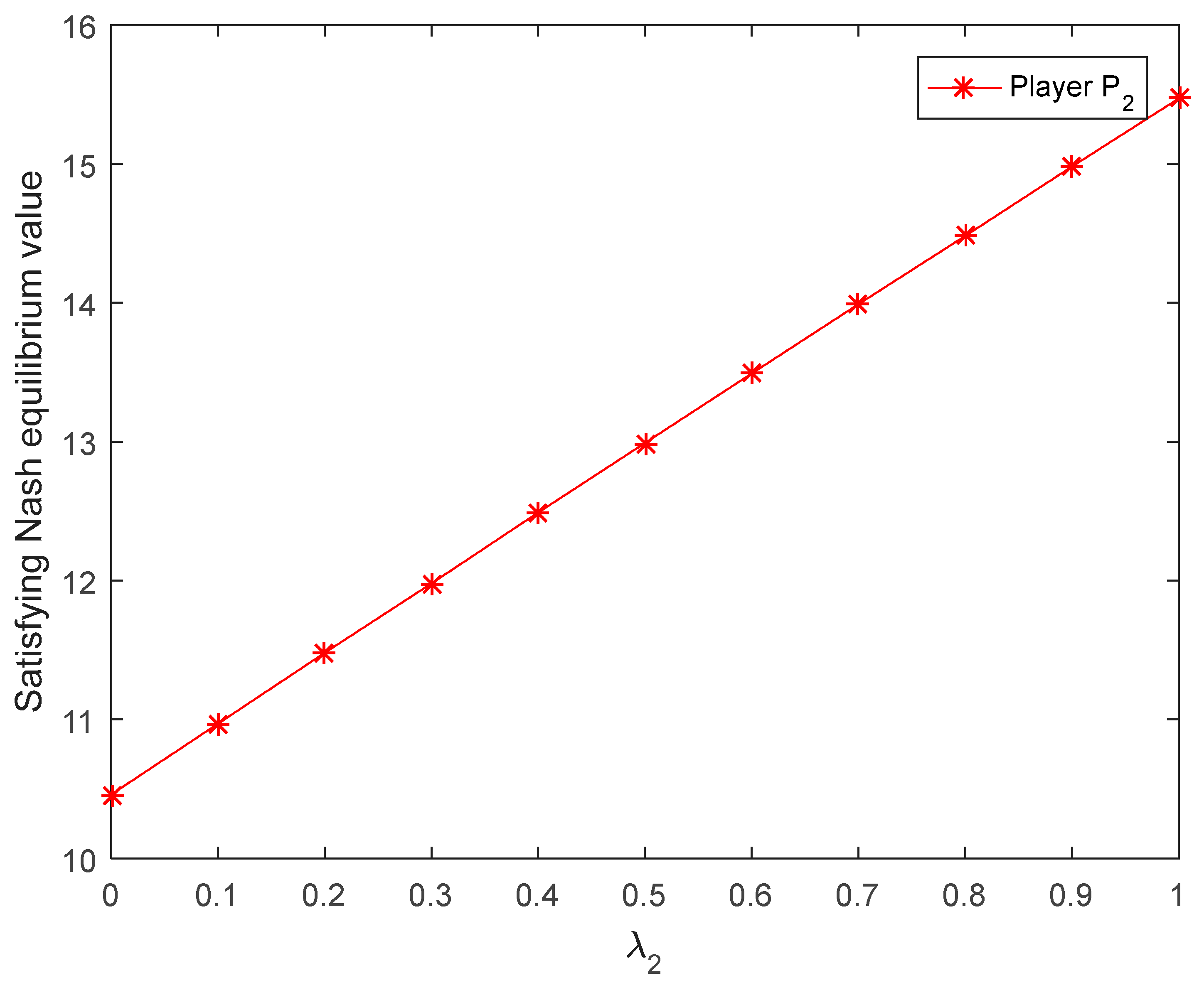
- In Li and Yang’s [27] method, the satisfying Nash equilibrium values of players are only affected by their own parameters and , and the strategy choice of a player is only affected by the other player’s parameters. However, in this paper, the Nash equilibrium values and corresponding Nash equilibrium strategies of players can be affected by the values of arbitrary and acceptance degree , which greatly strengthen the flexibility of the decision process.
- It can be seen from Figure 4 and Figure 5 that the satisfying Nash equilibrium values of players and increase with the increase in their own risk preferences. Figure 6 and Figure 7 show that the Nash equilibrium values of players increase with the increase in acceptance degree when , and they decrease with the increase in acceptance degree when . In the actual decision-making process, the more risk the player prefers, the higher the expected payoff. If players blindly pursue high risk too much, their payoffs will decline when a certain risk threshold is reached. It is easy to see from Figure 6 and Figure 7 that is the risk threshold. However, Figure 4 and Figure 5 do not reflect the risk threshold.
- Li and Yang [27] defuzzified the intuitionistic fuzzy preferences directly into real numbers through applying a difference-index based sorting method. Such transformation may bring about the loss of information and irrational outcomes. However, in the proposed method, the cut sets are used to handle the GIF preference, which is a valid and appropriate method for preserving as much information as possible.
5.4. Comparative Analysis with the Method of An et al.
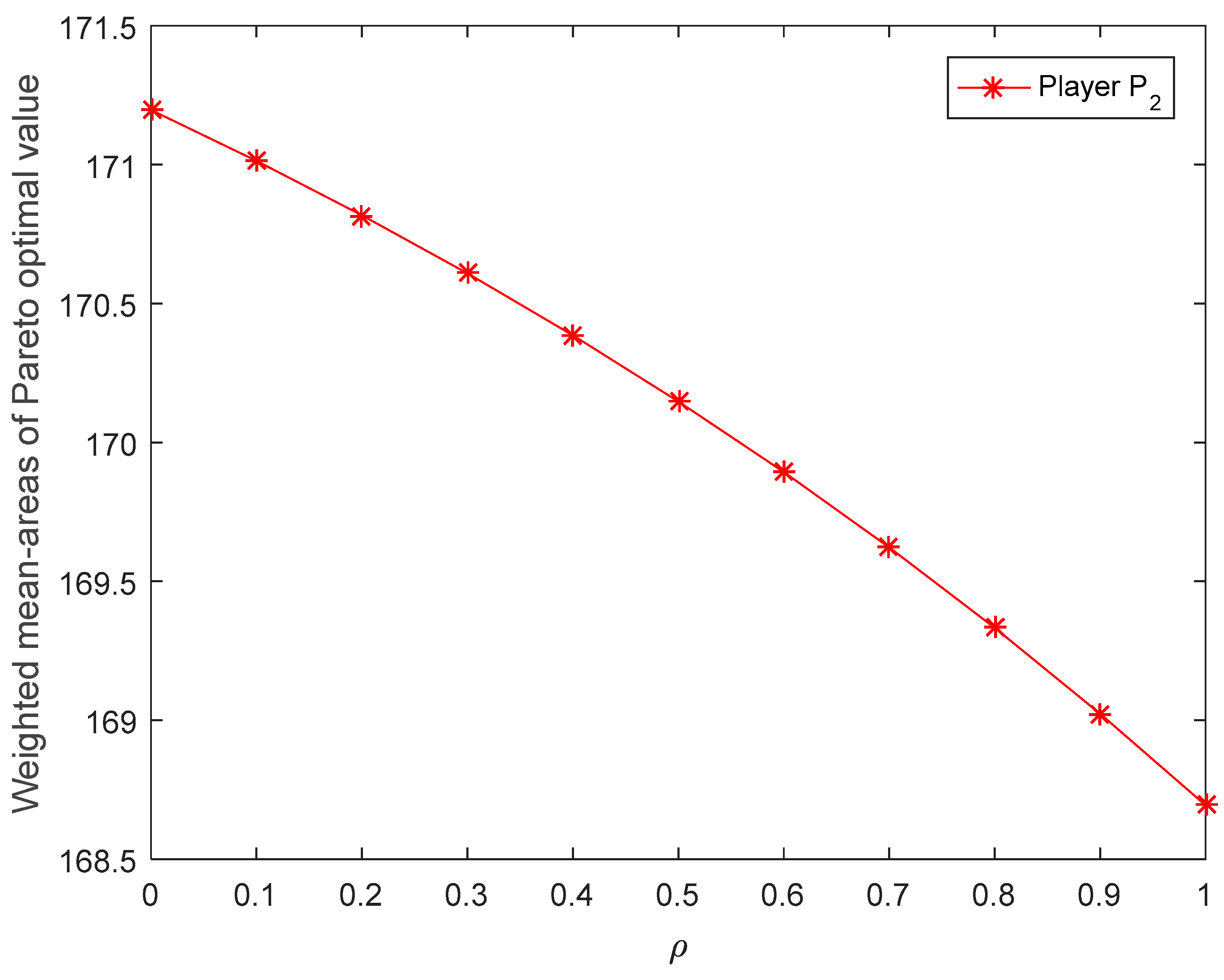
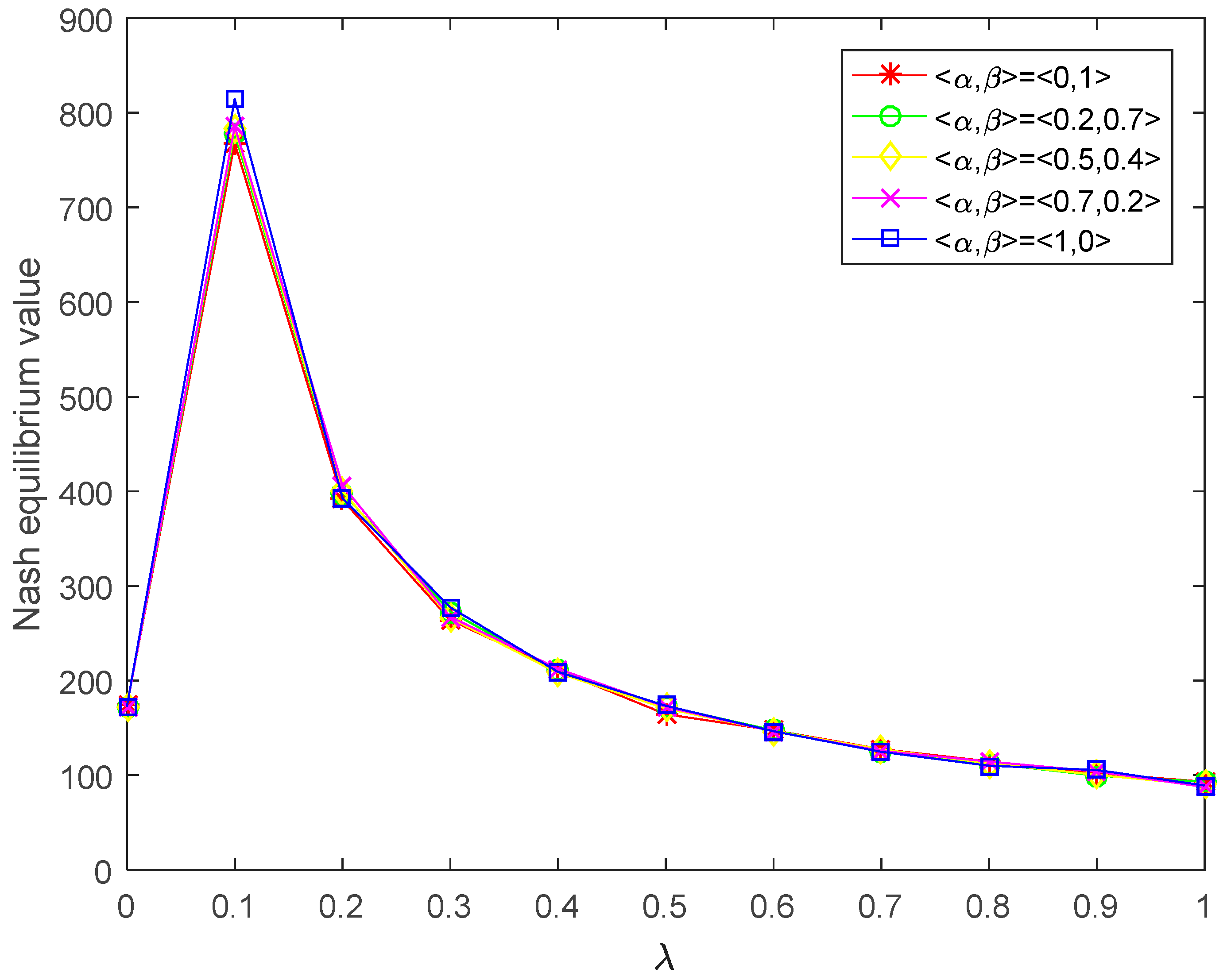
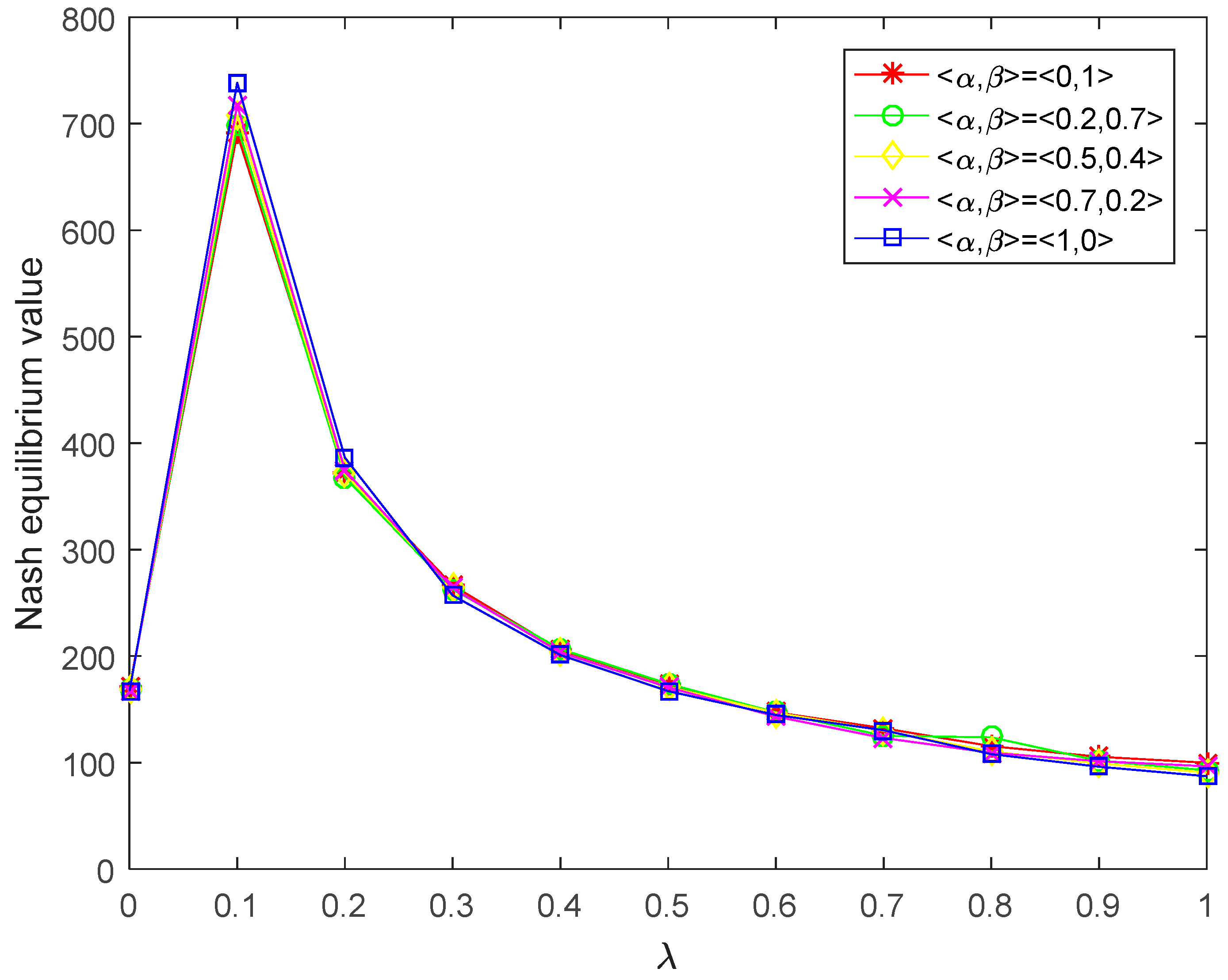
- It can be seen from Figure 8 and Figure 9 that the weighted mean areas Pareto optimal values of player increase with the increase in the parameter , and the weighted mean areas Pareto optimal values of player decrease with the increase in the parameter . In general, when players have the same risk preference, the trend of the players’ Nash equilibrium value with the change of risk preference should be the same. Figure 10 and Figure 11 demonstrate that the Nash equilibrium values of players and increase with the increase in acceptance degree when , and they decrease with the increase in acceptance degree when . In the actual decision-making process, the more risk the player prefers, the higher the expected payoff. If players blindly pursue high risk too much, their payoffs will decline when a certain risk threshold is reached. It is easy to see from Figure 10 and Figure 11 that is the risk threshold. However, the results obtained by the method of An et al. [31] not only do not reflect the risk threshold, but also, the weighted mean areas of Pareto optimal values of players have a completely opposite trend with the change of risk preference. Thus, from the intuitive and logical point of view, the results obtained by the proposed method are more in accordance with the real-life situation than [31].
- Intuitively, the decision results in Table 3 are richer than those in Table 2. Additionally, in Table 2, the probability of player (government) choosing a pure strategy (negative supervision) and the probability of player (corporation) choosing a pure strategy (maintain the status quo) do not change with different values of parameter , and the values of and are always equal to zero. However, the Nash equilibrium strategy obtained by the proposed method changes with the different acceptance degrees of players, and it is not always zero. By changing the values of and , different Nash equilibrium strategies and Nash equilibrium values can be obtained, which enables players to have richer choices and make the decision more flexible in the various actual situations. Therefore, the results obtained by the method proposed in this paper are more reasonable than those in [31].
- In the method of An et al. [31], the intuitionistic fuzzy preferences are directly defuzzified into real numbers by adopting a mean-area ranking method, which makes it easy to create the loss of information and bring about inadvisable outcomes. However, the proposed method of this paper employs the cut set of GIFNs to transform the GIF preference into an interval to address the bi-matrix game problem, which is an effective and suitable technique for holding GIF information longer.
6. Discussion
6.1. Advantages
- This paper provides a novel way to address GIF information that can retain as much information as possible during the game process. The proposed method can offer more detailed information regarding the Nash equilibrium value, including the tendency of a player’s Nash equilibrium value at different levels.
- During the processes of model conversion and solution, this paper not only skillfully combines interval order relation with interval goal program but also considers the player’s acceptance degree. These processes are rigorous, meaningful, and reasonable.
- Taking full account of the player’s acceptance degree of possible violations of GIF constraints significantly increases the flexibility of the game process and makes the results more realistic.
6.2. Disadvantages
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- He, Z.X.; Shen, W.X.; Li, Q.B.; Xu, S.C.; Zhao, B.; Long, R.Y.; Chen, H. Investigating external and internal pressures on corporate environmental behavior in papermaking enterprises of China. J. Clean. Prod. 2018, 172, 1193–1211. [Google Scholar]
- Jiménez-Parra, B.; Alonso-Martínez, D.; Godos-Díez, J.L. The influence of corporate social responsibility on air pollution: Analysis of environmental regulation and eco-innovation effects. Corp. Soc. Responsib. Environ. Manag. 2018, 25, 1363–1375. [Google Scholar]
- Xing, Y.; Qiu, D. Solving triangular intuitionistic fuzzy matrix game by applying the accuracy function method. Symmetry 2019, 11, 1258. [Google Scholar]
- Brikaa, M.G.; Zheng, Z.; Ammar, E.-S. Fuzzy multi-objective programming approach for constrained matrix games with payoffs of fuzzy rough numbers. Symmetry 2019, 11, 702. [Google Scholar]
- Xue, W.T.; Xu, Z.S.; Zeng, X.J. Solving matrix games based on ambika method with hesitant fuzzy information and its application in the counter-terrorism issue. Appl. Intell. 2021, 51, 1227–1243. [Google Scholar]
- Yang, J.; Xu, Z.S. Matrix game-based approach for MADM with probabilistic triangular intuitionistic hesitant fuzzy information and its application. Comput. Ind. Eng. 2022, 163, 107787. [Google Scholar]
- Zhang, W.; Xing, Y.; Qiu, D. Multi-objective fuzzy bi-matrix game model: A multicriteria non-linear programming approach. Symmetry 2017, 9, 159. [Google Scholar]
- An, J.J.; Li, D.F. A linear programming approach to solve constrained bi-matrix games with intuitionistic fuzzy payoffs. Int. J. Fuzzy Syst. 2019, 21, 908–915. [Google Scholar]
- Feng, Z.; Tan, C. Credibilistic bimatrix games with loss aversion and triangular fuzzy payoffs. Int. J. Fuzzy Syst. 2020, 22, 1635–1652. [Google Scholar]
- Gao, L. An algorithm for finding approximate Nash equilibria in bimatrix games. Soft Comput. 2021, 25, 1181–1191. [Google Scholar]
- Bhaumik, A.; Roy, S.K.; Li, D.F. (α,β,γ)-cut set based ranking approach to solving bi-matrix games in neutrosophic environment. Soft Comput. 2021, 25, 2729–2739. [Google Scholar]
- Mukhopadhyay, A.; Chakraborty, S. Replicator equations induced by microscopic processes in nonoverlapping population playing bimatrix games. Chaos 2021, 31, 023123. [Google Scholar] [PubMed]
- Zhang, L.; Reniers, G.; Qiu, X. Playing chemical plant protection game with distribution-free uncertainties. Reliab. Eng. Syst. Saf. 2019, 191, 105899. [Google Scholar]
- Fei, W.; Li, D.F. Bilinear programming approach to solve interval bimatrix games in tourism planning management. Int. J. Fuzzy Syst. 2016, 18, 504–510. [Google Scholar]
- Brikaa, M.G.; Ammar, E.S.; Zheng, Z. Solving bi-matrix games in tourism planning management under rough interval approach. Int. J. Math. Sci. Comput. 2019, 5, 44–62. [Google Scholar]
- Yang, J.; Xu, Z.S.; Dai, Y.W. Simple noncooperative games with intuitionistic fuzzy information and application in ecological management. Appl. Intell. 2021, 51, 6685–6697. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar]
- Maeda, T. Characterization of the equilibrium strategy of the bi-matrix game with fuzzy payoff. J. Math. Anal. Appl. 2000, 251, 885–896. [Google Scholar]
- Vijay, V.; Chandra, S.; Bector, C.R. Matrix games with fuzzy goals and fuzzy payoffs. Omega 2005, 33, 425–429. [Google Scholar] [CrossRef]
- Larbani, M. Solving bi-matrix games with fuzzy payoffs by introducing nature as a third player. Fuzzy Sets Syst. 2009, 160, 657–666. [Google Scholar]
- Atanassov, K.T. Intuitionistic fuzzy sets. Fuzzy Sets Syst. 1986, 20, 87–96. [Google Scholar]
- Nayak, P.K.; Pal, M. Intuitionistic fuzzy optimization technique for Nash equilibrium solution of multi-objective bi-matrix games. J. Uncertain Syst. 2011, 5, 271–285. [Google Scholar]
- Nan, J.X.; Li, D.F.; An, J.J. Solving bi-matrix games with intuitionistic fuzzy goals and intuitionistic fuzzy payoffs. J. Intell. Fuzzy Syst. 2017, 33, 3723–3732. [Google Scholar]
- Seikh, M.R.; Pal, M.; Nayak, P.K. Application of triangular intuitionistic fuzzy numbers in bi-matrix games. Int. J. Pure Appl. Math. 2012, 79, 235–247. [Google Scholar]
- Seikh, M.R.; Nayak, P.K.; Pal, M. Solving bi-matrix games with payoffs of triangular intuitionistic fuzzy numbers. Eur. J. Pure Appl. Math. 2015, 8, 153–171. [Google Scholar]
- Yang, J.; Li, D.F.; Lai, L.B. Parameterized bilinear programming methodology for solving triangular intuitionistic fuzzy number bimatrix games. J. Intell. Fuzzy Syst. 2016, 31, 115–125. [Google Scholar]
- Li, D.F.; Yang, J. A difference-index based ranking bilinear programming approach to solve bi-matrix games with payoffs of trapezoidal intuitionistic fuzzy number. J. Appl. Math. 2013, 2013, 697261. [Google Scholar]
- Verma, T.; Kumar, A.; Appadoo, S. Modified difference-index based ranking bilinear programming approach to solving bimatrix games with payoffs of trapezoidal intuitionistic fuzzy numbers. J. Intell. Fuzzy Syst. 2015, 29, 1607–1618. [Google Scholar]
- Khan, I.; Mehra, A. A novel equilibrium solution concept for intuitionistic fuzzy bi-matrix games considering proportion mix of possibility and necessity expectations. Granul. Comput. 2020, 5, 461–483. [Google Scholar]
- Yang, J.; Fei, W.; Li, D.F. Non-linear programming approach to solve bi-matrix games with payoffs represented by I-fuzzy numbers. Int. J. Fuzzy Syst. 2016, 18, 492–503. [Google Scholar]
- An, J.J.; Li, D.F.; Nan, J.X. A mean-area ranking based non-linear programming approach to solve intuitionistic fuzzy bi-matrix games. J. Intell. Fuzzy Syst. 2017, 33, 563–573. [Google Scholar]
- Abdul Ghaffar, A.R.; Hasan, M.G.; Ashraf, Z.; Khan, M.F. Fuzzy goal programming with an imprecise intuitionistic fuzzy preference relations. Symmetry 2020, 12, 1548. [Google Scholar]
- Roy, S.K.; Bhaumik, A. Intelligent water management: A triangular type-2 intuitionistic fuzzy matrix games approach. Water Resour. Manag. 2018, 32, 949–968. [Google Scholar]
- Bhaumik, A.; Roy, S.K.; Weber, G.W. Hesitant interval-valued intuitionistic fuzzy-linguistic term set approach in prisoners’ dilemma game theory using TOPSIS: A case study on human-trafficking. Cent. Eur. J. Oper. Res. 2020, 28, 797–816. [Google Scholar]
- Bhaumik, A.; Roy, S.K. Intuitionistic interval-valued hesitant fuzzy matrix games with a new aggregation operator for solving management problem. Granul. Comput. 2021, 6, 359–375. [Google Scholar]
- Yue, Q.; Yu, B.; Zhang, L.; Zhang, L.J.; Zhang, J. Two-sided matching for triangular intuitionistic fuzzy numbers in smart environmental protection. IEEE Access 2019, 7, 42426–42435. [Google Scholar]
- Yang, J.; Kilgour, D.M. Bi-fuzzy graph cooperative game model and application to profit allocation of ecological exploitation. Int. J. Fuzzy Syst. 2019, 21, 1858–1867. [Google Scholar]
- Liu, D.; Ji, X.; Tang, J.; Li, H. A fuzzy cooperative game theoretic approach for multinational water resource spatiotemporal allocation. Eur. J. Oper. Res. 2020, 282, 1025–1037. [Google Scholar]
- Nazari, S.; Ahmadi, A.; Kamrani Rad, S.; Ebrahimi, B. Application of non-cooperative dynamic game theory for groundwater conflict resolution. J. Environ. Manag. 2020, 270, 110889. [Google Scholar]
- Gu, C.; Wang, X.; Zhao, J.; Ding, R.; He, Q. Evolutionary game dynamics of Moran process with fuzzy payoffs and its application. Appl. Math. Comput. 2020, 378, 125227. [Google Scholar]
- Hu, C.Y.; Kearfott, R.B.; Korvin, A.D.; Kreinovich, V. Knowledge Processing with Interval and Soft Computing; Springer: London, UK, 2008; pp. 168–172. [Google Scholar]
- Ishibuchi, H.; Tanaka, H. Multiobjective programming in optimization of the interval objective function. Eur. J. Oper. Res. 1990, 48, 219–225. [Google Scholar]
- Nehi, H.M. A new ranking method for intuitionistic fuzzy numbers. Int. J. Fuzzy Syst. 2010, 12, 80–86. [Google Scholar]
- Atanassov, K.T. Intuitionistic Fuzzy Sets; Springer: Heidelberg, Germany, 1999. [Google Scholar]
- Li, D.F. A ratio ranking method of triangular intuitionistic fuzzy numbers and its application to MADM problems. Comput. Math. Appl. 2010, 60, 1557–1570. [Google Scholar]
- Inuiguchi, M.; Ramik, J. Possibilistic linear programming: A brief review of fuzzy mathematical programming and a comparison with stochastic programming in portfolio selection. Fuzzy Sets Syst. 2000, 111, 3–28. [Google Scholar]
- Owen, G. Game Theory, 2nd ed.; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Mangasarian, O.L.; Stone, H. Two-person nonzero-sum games and quadratic programming. J. Math. Anal. Appl. 1964, 9, 348–355. [Google Scholar]
- Li, D.F.; Liu, J.C. A parameterized non-linear programming approach to solve matrix games with payoffs of I-fuzzy numbers. IEEE Trans. Fuzzy Syst. 2015, 23, 885–896. [Google Scholar]
- Hajiagha, S.R.; Babalhavaeji, H.; Zavadskas, E.K.; Liao, H. An analysis of trapezoidal intuitionistic fuzzy preference relations based on (α,β)-cuts. Int. J. Fuzzy Syst. 2020, 22, 2735–2746. [Google Scholar]
- Nan, J.X.; Li, D.F.; Zhang, M.J. A lexicographic method for matrix games with payoffs of triangular intuitionistic fuzzy numbers. Int. J. Comput. Int. Syst. 2008, 3, 280–289. [Google Scholar]
- Li, D.F. An effective methodology for solving matrix games with fuzzy payoffs. IEEE Trans. Cybern. 2013, 43, 610–621. [Google Scholar]
- Peng, J.; Song, Y.; Tu, G.P.; Liu, Y.H. A study of the dual-target corporate environmental behavior (DTCEB) of heavily polluting enterprises under different environment regulations: Green innovation vs. pollutant emissions. J. Clean. Prod. 2021, 297, 126602. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| <0,1> | <0.1,0.8> | <0.3,0.6> | <0.5,0.4> | <0.6,0.3> | |
|---|---|---|---|---|---|
| [0, 347.5309] | [0, 346.8003] | [0, 346.2119] | [16.0880, 329.7892] | [0, 345.7154] | |
| [0, 328.9286] | [0, 339.497] | [0, 339.6408] | [0, 338.5919] | [0, 346.8725] | |
| [0, 328.9286] | [0, 339.497] | [0, 339.6408] | [16.0880, 329.7892] | [0, 345.7154] | |
| (0.6328, 0.1381, 0.2291) | (0.688, 0.0193, 0.2927) | (0.6707, 0.0101, 0.3192) | (0.6277, 0.0393, 0.333) | (0.5364, 0.1190, 0.3446) | |
| (0.815, 0.0603, 0.1247) | (0.7409, 0.1309, 0.1281) | (0.8034, 0, 0.1966) | (0.5475, 0.4525, 0) | (0.1853, 0.8147, 0) | |
| (0, 1, 0) | (0, 1, 0) | (0, 1, 0) | (0, 1, 0) | (0, 1, 0) | |
| (0, 0.6981, 0.3019) | (0, 1, 0) | (0, 0.9265, 0.0735) | (0, 1, 0) | (0.3004, 0.674, 0.0256) | |
| [16.2372, 330.1816] | [17.9850, 329.2688] | [17.4914, 328.883] | [0, 344.7673] | [0, 341.3333] | |
| [22.9759, 323.0472] | [17.5476, 331.3088] | [0, 348.7793] | [0, 345.0887] | [14.8145, 326.3595] | |
| [22.9759, 323.0472] | [17.5476, 329.2688] | [17.4914, 328.883] | [0, 344.7673] | [14.8145, 326.3595] | |
| (0.8642,0, 0.1358) | (0.9142, 0, 0.0858) | (0.9533, 0.0033, 0.0434) | (0.9802, 0, 0.0198) | (0.9922, 0, 0.0078) | |
| (1, 0, 0) | (0.8554, 0.0796, 0.0650) | (0.8562, 0.1438, 0) | (0.6509, 0, 0.3491) | (0.3148, 0, 0.6852) | |
| (0, 0, 1) | (0, 0, 1) | (0, 0, 1) | (0, 0, 1) | (0, 0, 1) | |
| (0.2143, 0.7857, 0) | (0, 0.0421, 0.9579) | (0, 0, 1) | (0.6091, 0.3777, 0.0132) | (1, 0, 0) |
| Player P1 | Player P2 | |||
|---|---|---|---|---|
| 0 | (0.2545, 0.7455, 0) | 172.5330 | (0.5541, 0, 0.4459) | 171.1970 |
| 0.1 | (0.2430, 0.7570, 0) | 172.5665 | (0.5542, 0, 0.4458) | 171.0135 |
| 0.2 | (0.2311, 0.7689, 0) | 172.6001 | (0.5544, 0, 0.4456) | 170.8176 |
| 0.3 | (0.2186, 0.7814, 0) | 172.6337 | (0.5545, 0, 0.4455) | 170.6085 |
| 0.4 | (0.2055, 0.7945, 0) | 172.6674 | (0.5547, 0, 0.4453) | 170.3854 |
| 0.5 | (0.1919, 0.8081, 0) | 172.7011 | (0.5548, 0, 0.4452) | 170.1473 |
| 0.6 | (0.1777, 0.8223, 0) | 172.7348 | (0.5550, 0, 0.4450) | 169.8933 |
| 0.7 | (0.1628, 0.8372, 0) | 172.7687 | (0.5551, 0, 0.4449) | 169.6221 |
| 0.8 | (0.1472, 0.8528, 0) | 172.8025 | (0.5553, 0, 0.4447) | 169.3326 |
| 0.9 | (0.1308, 0.8692, 0) | 172.8364 | (0.5554, 0, 0.4446) | 169.0235 |
| 1 | (0.1136, 0.8864, 0) | 172.8704 | (0.5556, 0, 0.4444) | 168.6932 |
| <0,1> | <0.2,0.7> | <0.5,0.4> | <0.7,0.2> | <1,0> | |
|---|---|---|---|---|---|
| [0, 347.5309] | [17.0311, 329.3182] | [0, 345.7688] | [0, 345.4317] | [0.333, 349.8362] | |
| [0, 328.9286] | [0, 328.9568] | [0, 341.2992] | [12.5664, 331.7811] | [0.3145, 346.2709] | |
| [0, 328.9286] | [17.0311, 328.9568] | [0, 341.2992] | [12.5664, 331.7811] | [0.333, 346.2709] | |
| (0.6328, 0.1381, 0.2291) | (0.6638, 0, 0.3362) | (0.5785, 0.104, 0.3175) | (0.5680, 0.0962, 0.3359) | (0.0004, 0.9993, 0.0003) | |
| (0.815, 0.0603, 0.1247) | (0.8762, 0, 0.1238) | (0.5536, 0.4464, 0) | (0.6633, 0.2166, 0.1200) | (0, 1, 0) | |
| (0, 1, 0) | (0, 0.9985, 0.0015) | (0, 1, 0) | (0, 1, 0) | (0.1405, 0.8595, 0) | |
| (0, 0.6981, 0.3019) | (0, 0.6788, 0.3212) | (0, 1, 0) | (0, 1, 0) | (0.4042, 0.5874, 0.0084) | |
| [16.2372, 330.1816] | [0, 345.1106] | [0, 342.3091] | [0, 341.4819] | [24.6158, 309.7413] | |
| [22.9759, 323.0472] | [25.8908, 322.2203] | [0, 345.3942] | [0, 347.6357] | [14.3733, 324.5638] | |
| [22.9759, 323.0472] | [25.8908, 322.2203] | [0, 342.3091] | [0, 341.4819] | [24.6158, 309.7413] | |
| (0.8642, 0, 0.1358) | (0.9229, 0, 0.0771) | (0.958, 0, 0.042) | (0.9764, 0, 0.0236) | (0.0011, 0.0003, 0.9986) | |
| (1, 0, 0) | (1, 0, 0) | (0.3945, 0.378, 0.2274) | (0.3621, 0.1666, 0.4713) | (0.2805, 0, 0.7195) | |
| (0, 0, 1) | (0.0013, 0.0046, 0.9941) | (0, 0, 1) | (0, 0, 1) | (0.9993, 0.0007, 0) | |
| (0.2143, 0.7857, 0) | (0.2086, 0.7914, 0) | (1, 0, 0) | (0.6091, 0.3777, 0.0132) | (1, 0, 0) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Tu, G. Bi-Matrix Games with General Intuitionistic Fuzzy Payoffs and Application in Corporate Environmental Behavior. Symmetry 2022, 14, 671. https://doi.org/10.3390/sym14040671
Li S, Tu G. Bi-Matrix Games with General Intuitionistic Fuzzy Payoffs and Application in Corporate Environmental Behavior. Symmetry. 2022; 14(4):671. https://doi.org/10.3390/sym14040671
Chicago/Turabian StyleLi, Shuying, and Guoping Tu. 2022. "Bi-Matrix Games with General Intuitionistic Fuzzy Payoffs and Application in Corporate Environmental Behavior" Symmetry 14, no. 4: 671. https://doi.org/10.3390/sym14040671
APA StyleLi, S., & Tu, G. (2022). Bi-Matrix Games with General Intuitionistic Fuzzy Payoffs and Application in Corporate Environmental Behavior. Symmetry, 14(4), 671. https://doi.org/10.3390/sym14040671