
Complete Synchronization and Partial Anti-Synchronization of Complex Lü Chaotic Systems by the UDE-Based Control Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (a)
- Firstly, the dynamic gain feedback control method and linear feedback control method are presented to solve the synchronization and partial anti-synchronization problems of the nominal chaotic system, respectively;
- (b)
- Secondly, the controller of the nominal system is combined with the UDE controller to deal with the synchronization and partial anti-synchronization problems of a given chaotic system with both uncertainty and disturbance;
- (c)
- Finally, take the example of the complex Lü system and the numerical simulation verifies the effectiveness and feasibility of the proposed control method.
2. Preliminary Knowledge
2.1. Control Method of the Nominal System
2.2. UDE-Based Control Method
3. Problem Formation
4. Main Results and Discussion
4.1. Dynamic Gain Feedback Control for Synchronization
4.2. UDE-Based Dynamic Gain Feedback Control Method for Synchronization
4.3. Partial Anti-Synchronization of the Nominal System
4.4. UDE-Based Linear-like Feedback Control Method for Partial Anti-Synchronization
5. Numerical Simulations
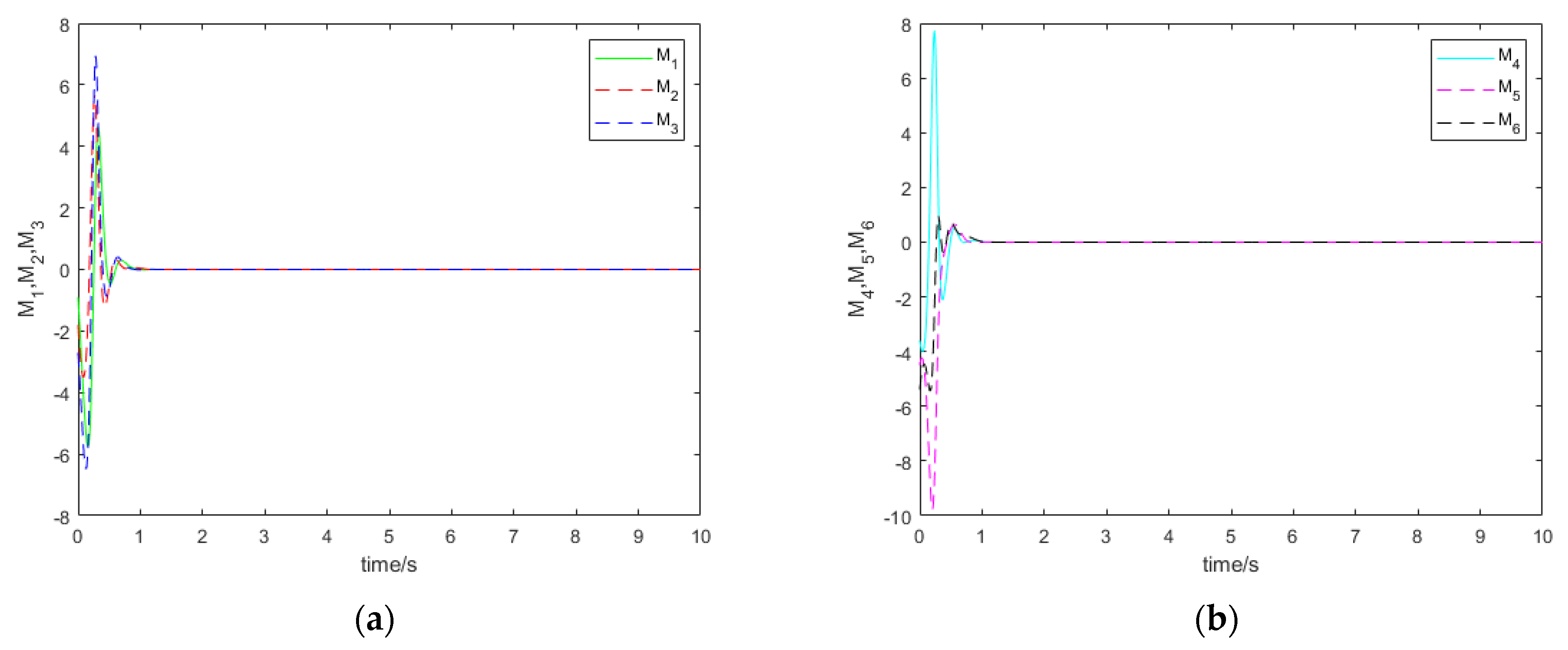
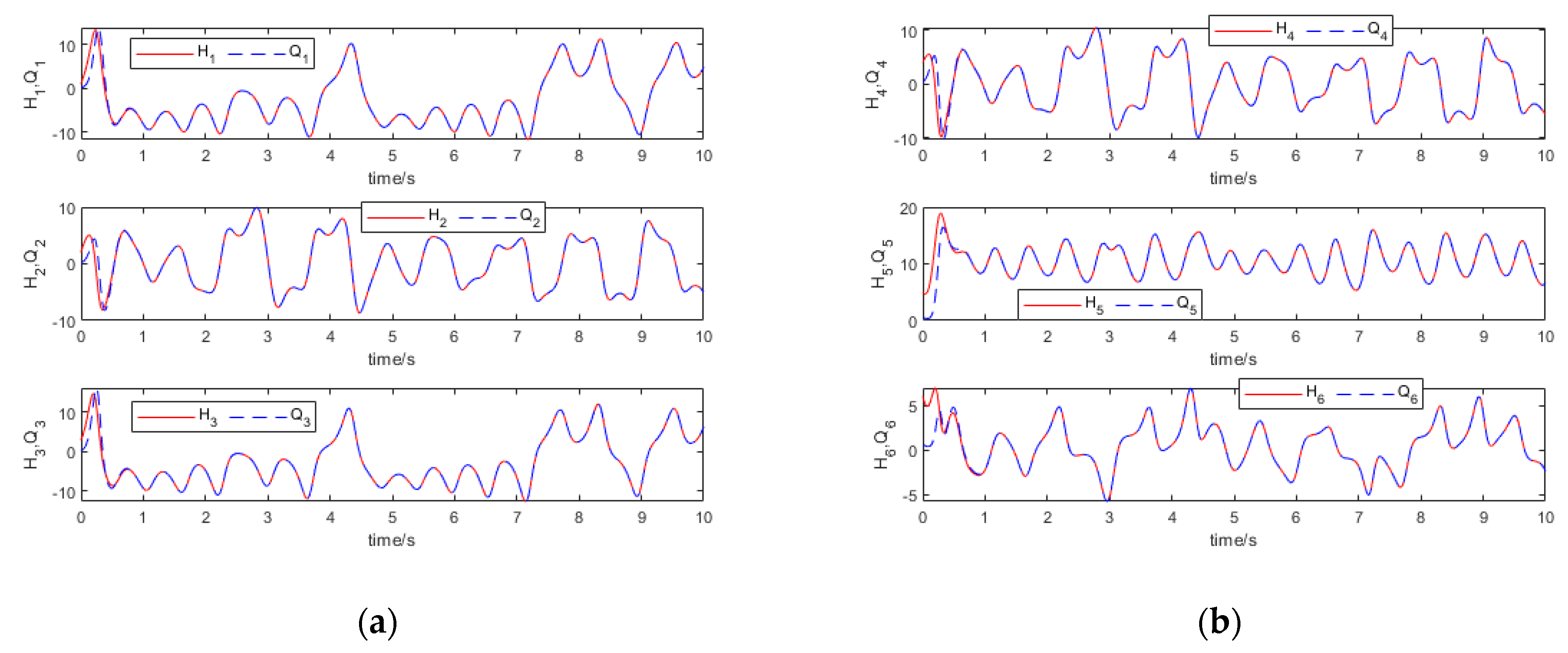
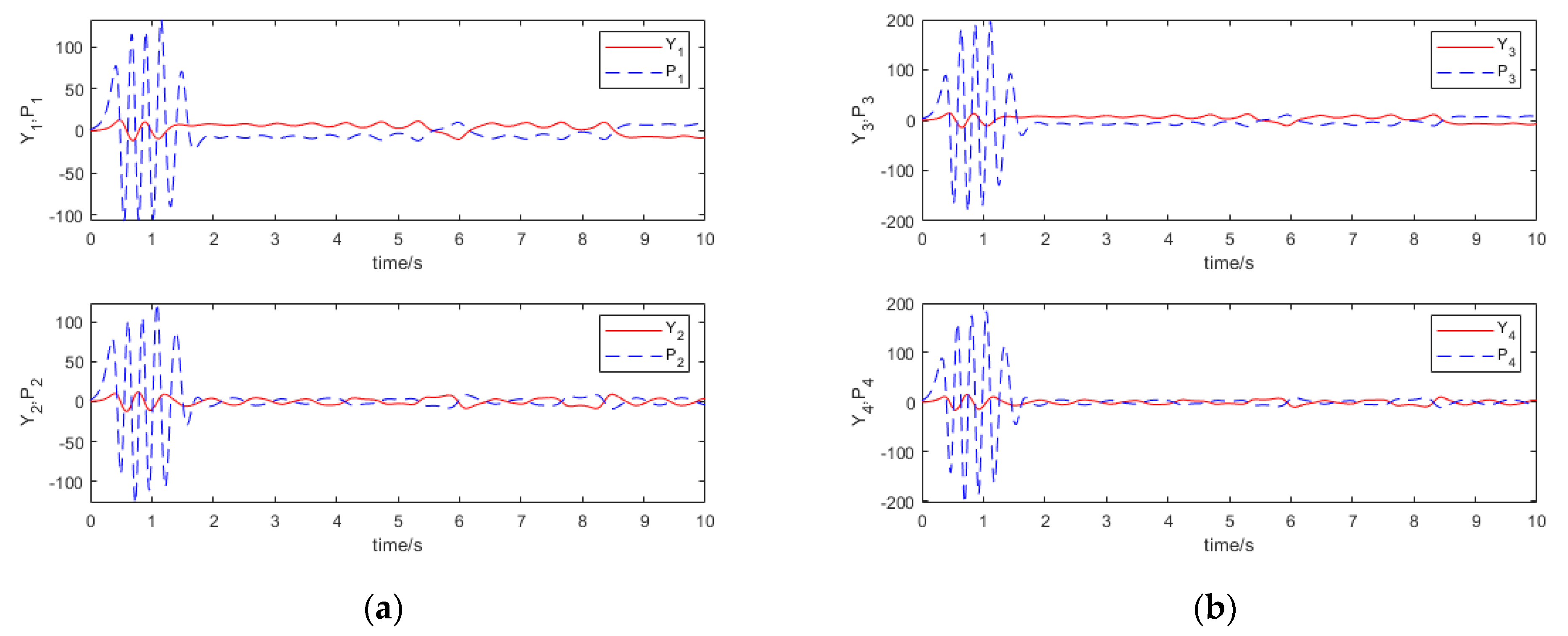
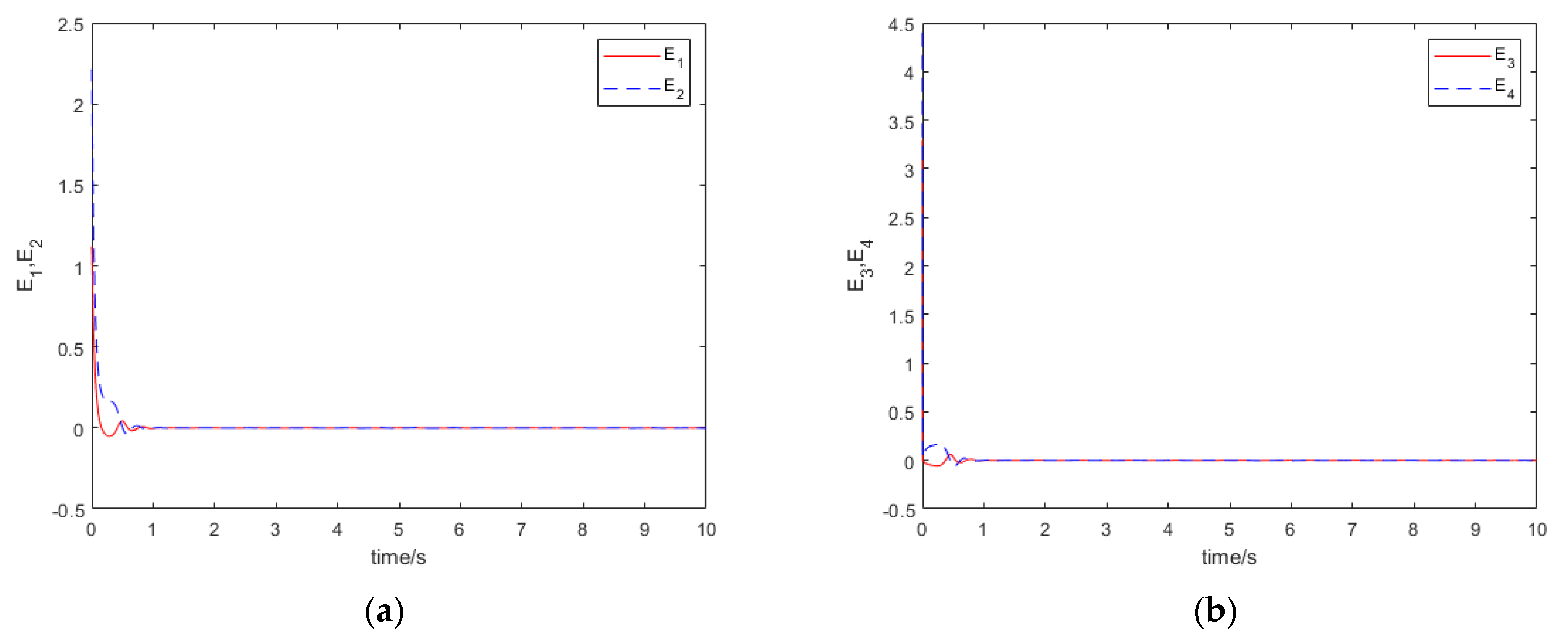
5.1. Synchronous Numerical Simulation of the Complex Lü System
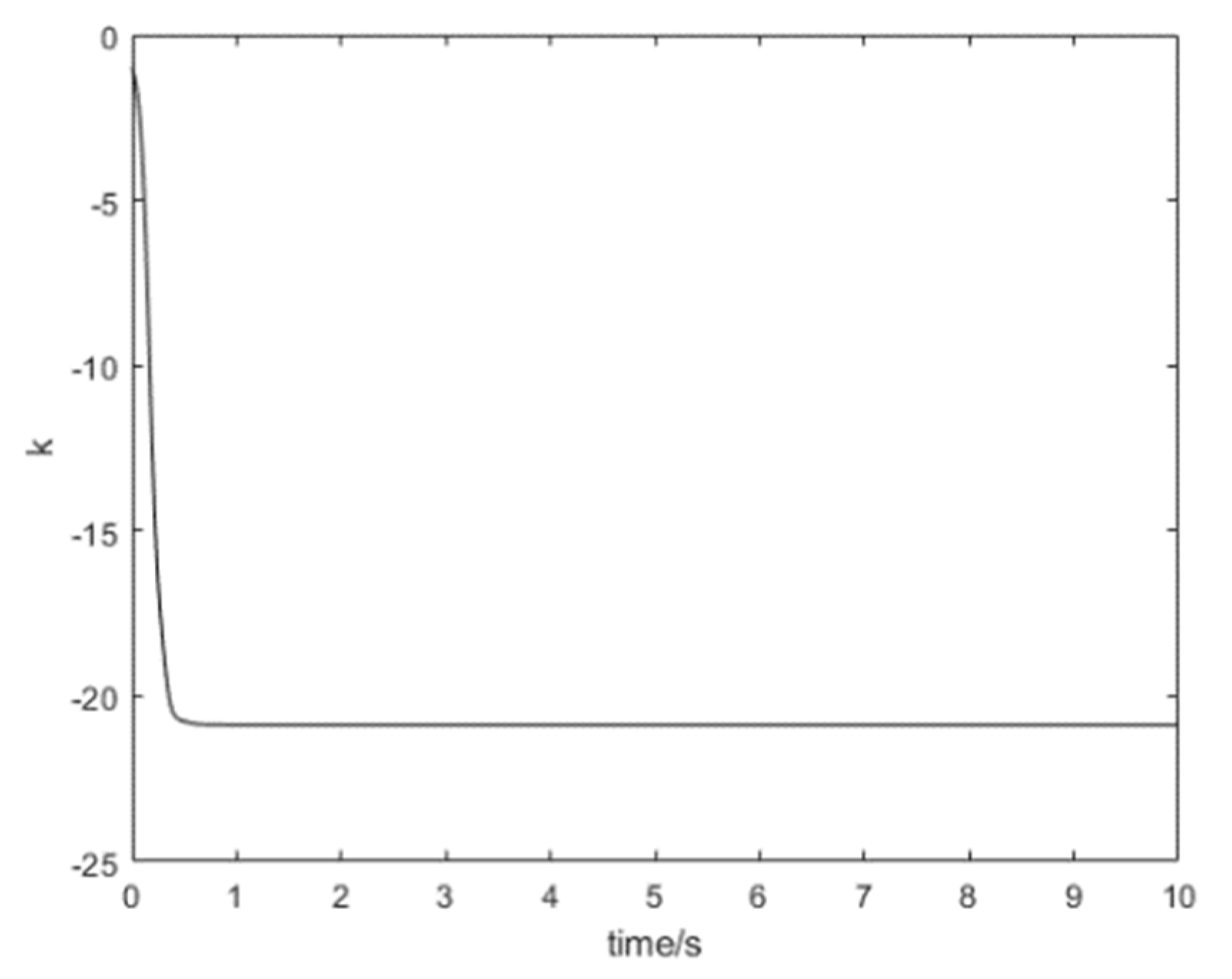
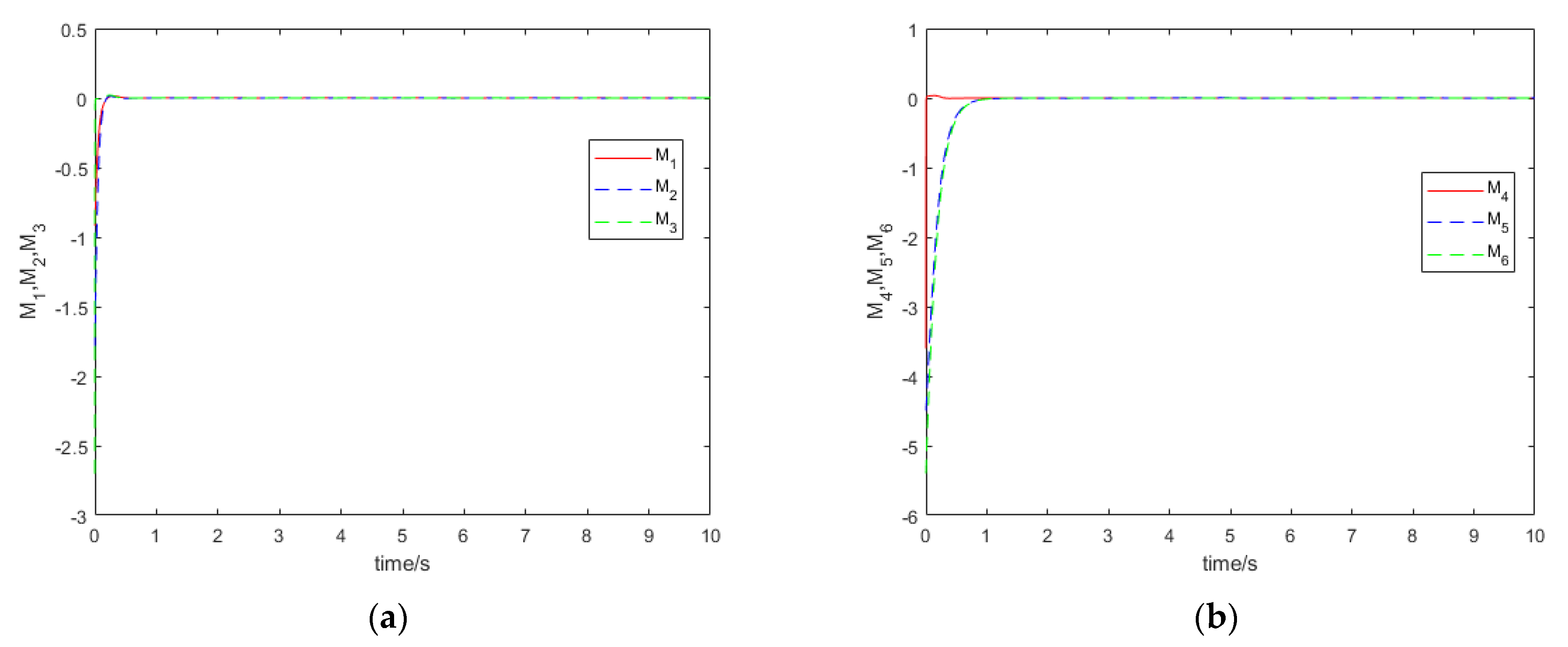
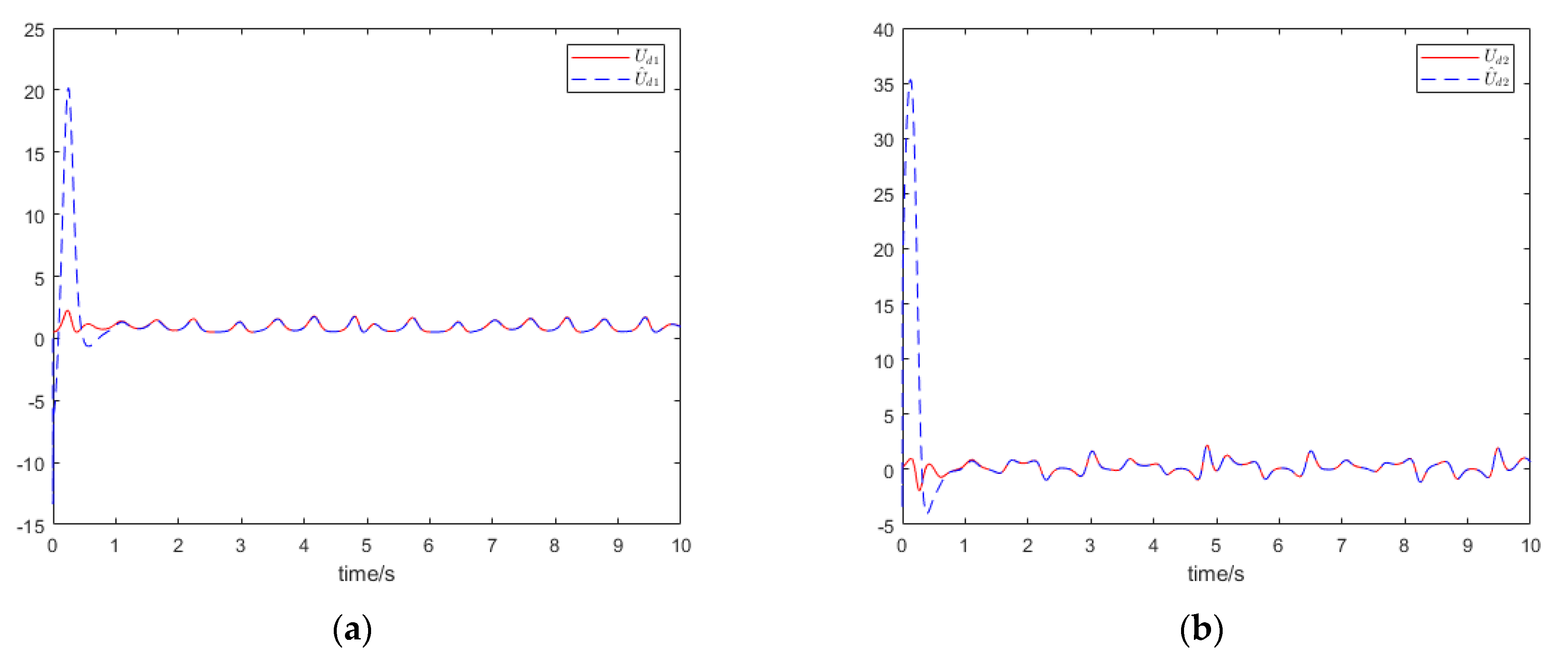
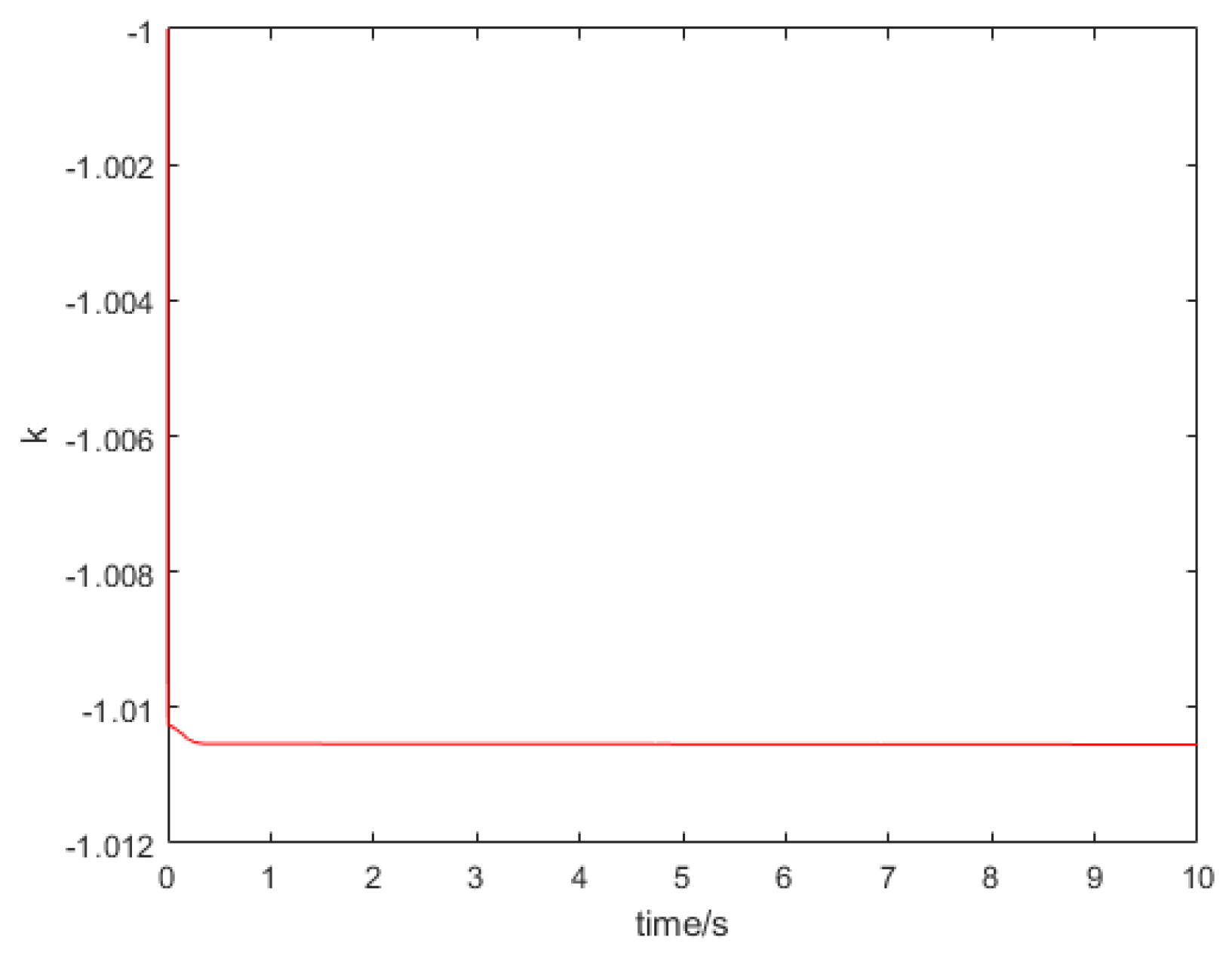
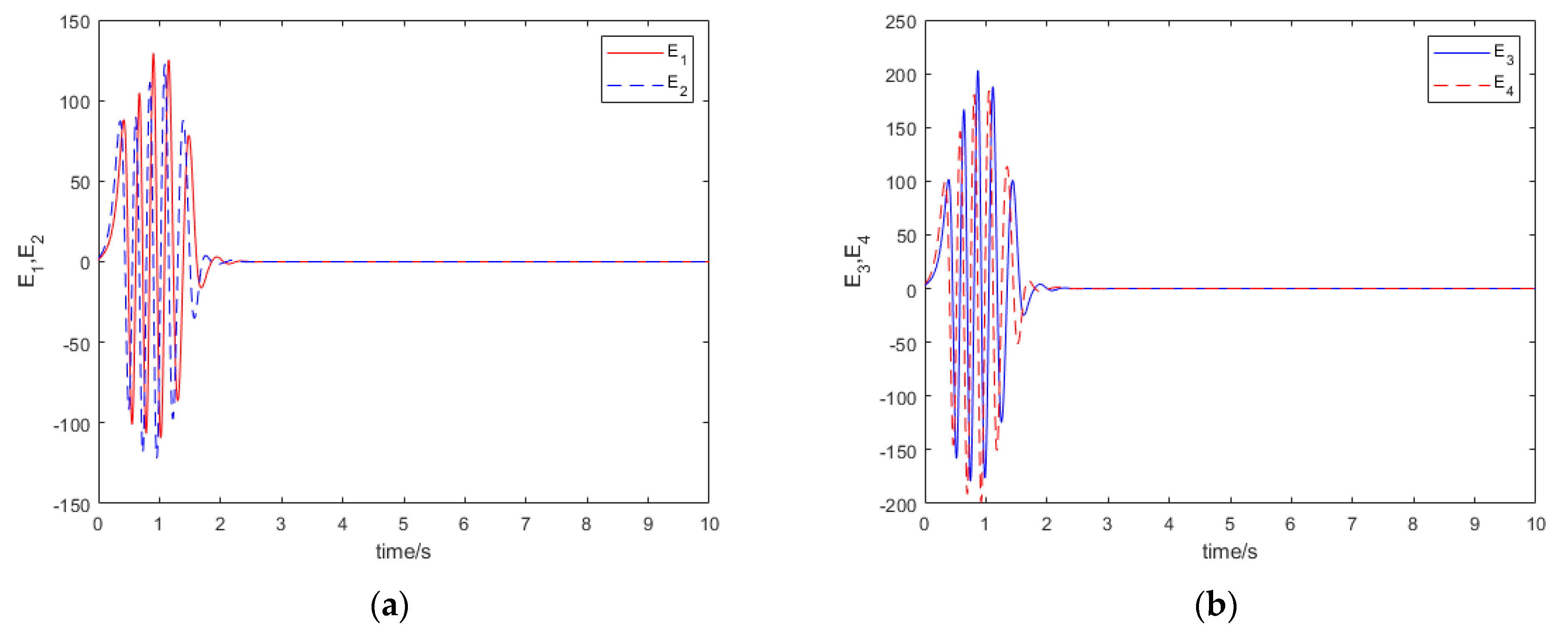
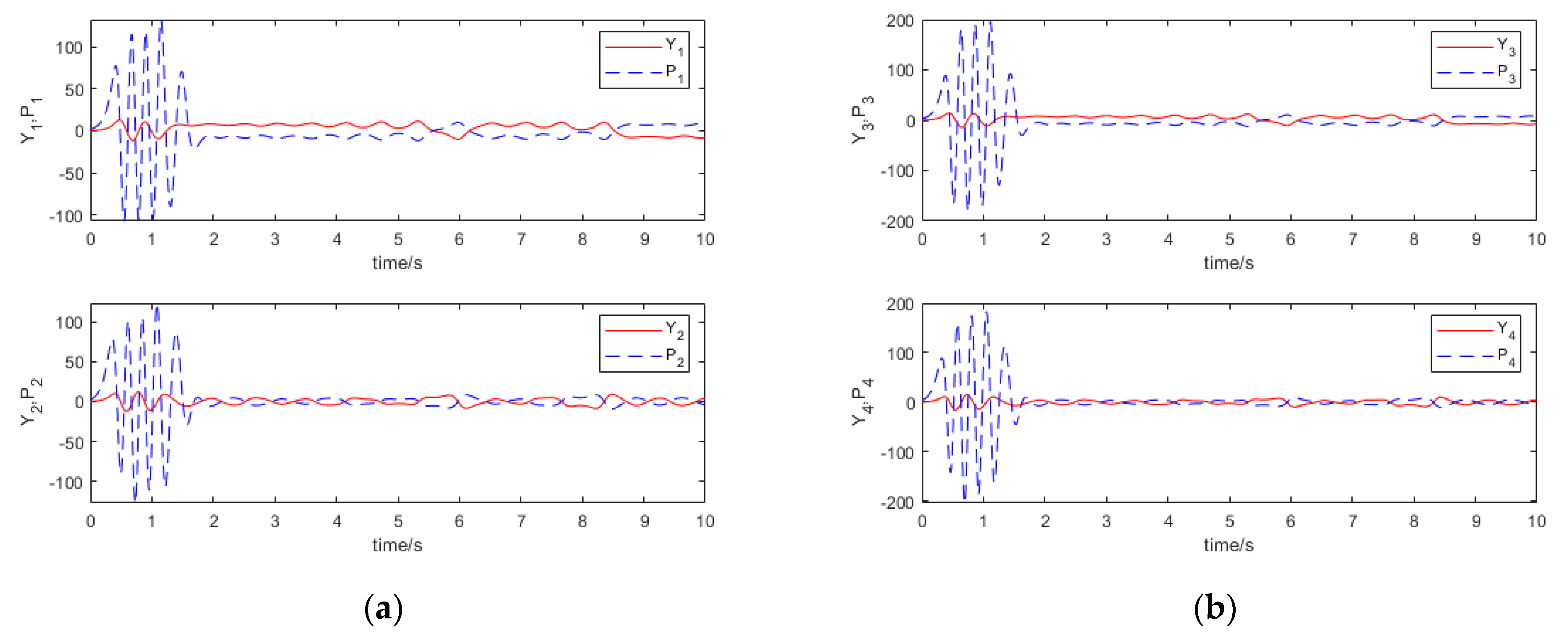
5.2. A UDE-Based Dynamic Feedback Control Synchronous Numerical Simulation
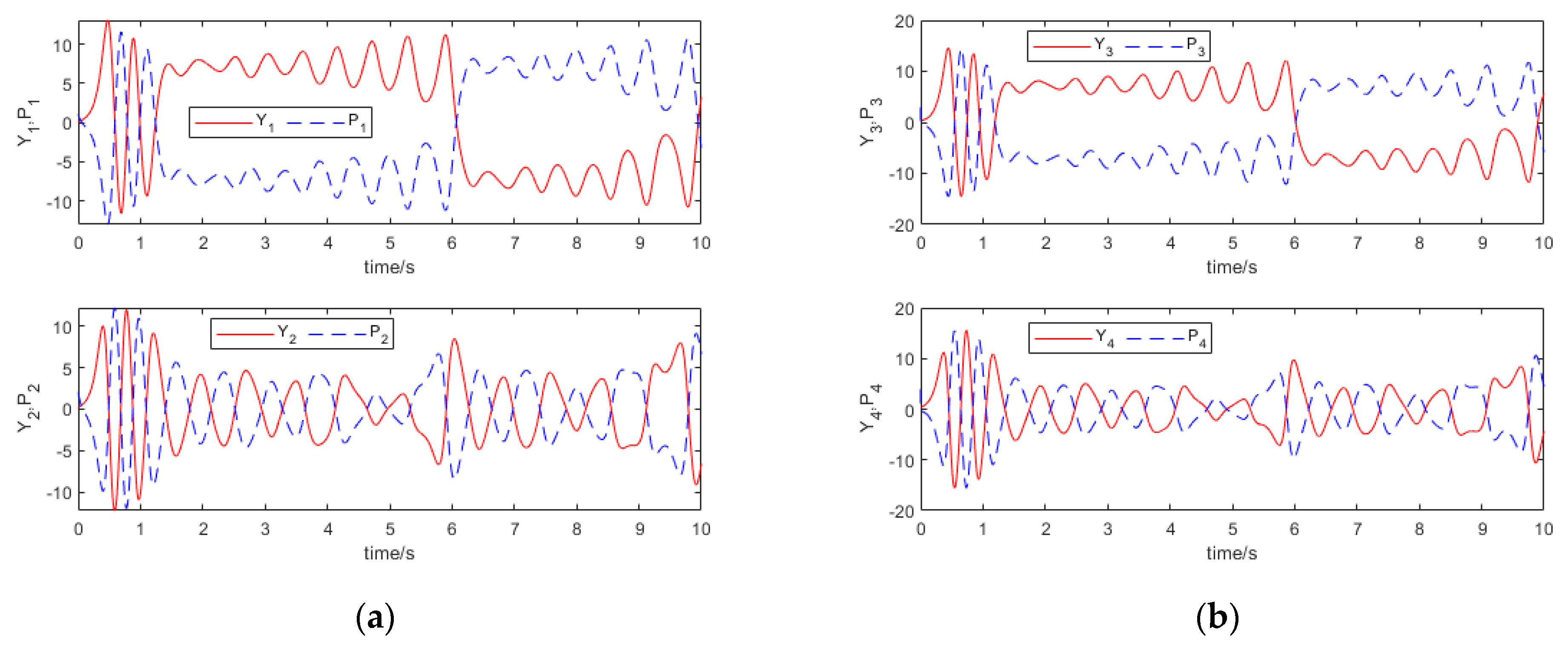
5.3. An Anti-Synchronous Numerical Simulation of the Nominal System
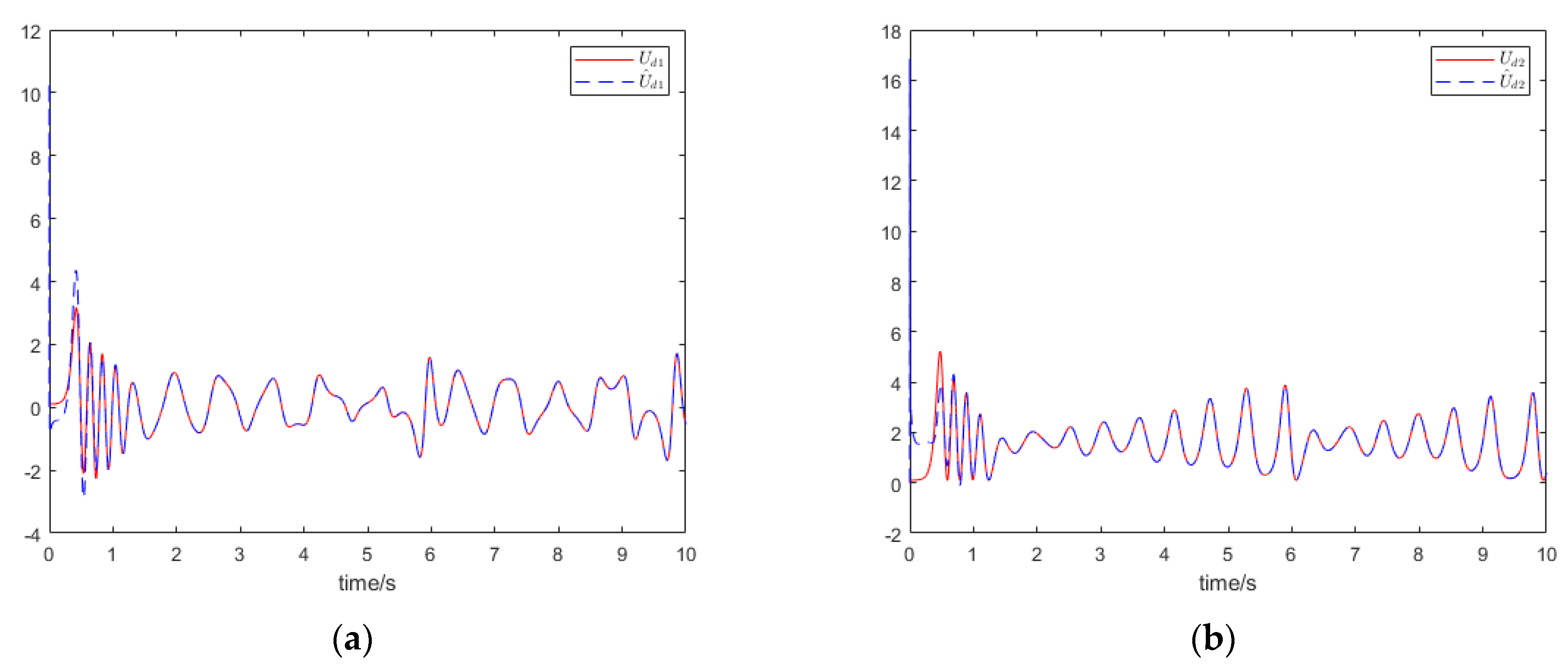
5.4. UDE-Based Linear-like Feedback Control Anti-Synchronous Numerical Simulation
5.5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef] [PubMed]
- Deepika, D.; Sandeep, K.; Shiv, N. Uncertainty and disturbance estimator based robust synchronization for a class of uncertain fractional chaotic system via fractional order sliding mode control. Chaos Solitons Fractals 2018, 115, 196–203. [Google Scholar] [CrossRef]
- Wang, Z. Anti-synchronization In Two Non-identical Hyperchaotic Systems With Known Or Unknown Parameters. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 2366–2372. [Google Scholar] [CrossRef]
- Chen, X.R.; Xiao, L.; Kingni, S.T.; Moroz, I.; Wei, Z.C.; Jahanshahi, H. Coexisting attractors, chaos control and synchronization in a self-exciting homopolar dynamo system. Int. J. Intell. Comput. Cybern. 2020, 13, 167–179. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Akbari, M.E. A chattering-free robust adaptive sliding mode controller for synchronization of two different chaotic systems with unknown uncertainties and external disturbances. Appl. Math. Comput. 2012, 218, 5757–5768. [Google Scholar] [CrossRef]
- Yi, X.F.; Guo, R.W.; Qi, Y. Stabilization of Chaotic Systems With Both Uncertainty and Disturbance by the UDE-Based Control Method. IEEE Access 2020, 8, 62471–62477. [Google Scholar] [CrossRef]
- Wang, Z.X.; Yu, X.T.; Wang, G.J. Anti-synchronization of the Hyperchaotic Systems with Uncertainty and Disturbance Using the UDE-Based Control Method. Math. Probl. Eng. 2020, 2020, 1–6. [Google Scholar]
- Wang, Y.S.; Li, B.; Lu, G.Y. Synchronization and Anti-synchronization for a 4-dimensional Hyperchaotic System. J. Vib. Test. Syst. Dyn. 2020, 4, 325–336. [Google Scholar] [CrossRef]
- Zhang, Q.; Lue, R.; Chen, R. Coexistence of anti-phase and complete synchronization in the generalized lorenz system. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3067–3072. [Google Scholar] [CrossRef]
- Agrawal, S.K.; Das, S. A modified adaptive control method for synchronization of some fractional chaotic systems with unknown parameters. Nonlinear Dyn. 2013, 73, 907–919. [Google Scholar] [CrossRef]
- Wang, Z.L.; Shi, X.R. Coexistence of anti-synchronization and complete synchronization of delay hyperchaotic L\"{u} systems via partial variables. J. Vib. Control. 2013, 19, 2199–2210. [Google Scholar] [CrossRef]
- Mezatio, B.A.; Motchongom, M.T.; Tekam, B.R.W.; Kengne, R.; Tchitnga, R.; Fomethe, A. A novel memristive 6D hyperchaotic autonomous system with hidden extreme multistability. Chaos Solitons Fractals 2019, 120, 100–115. [Google Scholar] [CrossRef]
- Reza, F.M.; Hadi, D.; Dumitru, B. A note on stability of sliding mode dynamics in suppression of fractional-order chaotic systems. Comput. Math. Appl. 2013, 66, 832–837. [Google Scholar]
- Guo, R.W. Projective synchronization of a class of chaotic systems by dynamic feedback control method. Nonlinear Dyn. 2017, 90, 53–64. [Google Scholar] [CrossRef]
- Zhang, C.; Deng, F.; Zhang, W.; Hou, T.; Yang, Z. Anti-Synchronization and Synchronization of Coupled Chaotic System With Ring Connection and Stochastic Perturbations. IEEE Access 2019, 7, 76902–76909. [Google Scholar] [CrossRef]
- Ren, B.B.; Zhong, Q.C.; Chen, J.H. Robust Control for a Class of Non-affine Nonlinear Systems Based on the Uncertainty and Disturbance Estimator. IEEE Trans. Ind. Electron. 2015, 62, 5881–5888. [Google Scholar] [CrossRef]
- Jia, H.; Chen, S.H.; Chen, L. Adaptive control for anti-synchronization of Chua’s chaotic system. Phys. Lett. A 2005, 339, 455–460. [Google Scholar]
- Karimov, A.; Tutueva, A.; Karimov, T.; Druzhina, O.; Butusov, D. Adaptive Generalized Synchronization between Circuit and Computer Implementations of the Rssler System. Appl. Sci. 2020, 11, 81. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Y.; Li, G.; Xiang, W.; Xu, G. Adaptive Fuzzy Synchronization of Fractional-Order Chaotic (Hyperchaotic) Systems with Input Saturation and Unknown Parameters. Complexity 2017, 2017, 6853826. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.P.; Li, W.L. Anti-Synchronization of Chaotic System by Sliding Mode Control and Observer. Key Eng. Mater. 2010, 439–440, 1247–1252. [Google Scholar]
- Peng, R.L.; Jiang, C.; Guo, R. Partial Anti-Synchronization of the Fractional-Order Chaotic Systems through Dynamic Feedback Control. Mathematics 2021, 9, 718. [Google Scholar] [CrossRef]
- Ma, J.; Li, F.; Huang, L.; Jin, W.Y. Complete synchronization, phase synchronization and parameters estimation in a realistic chaotic system. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 3770–3785. [Google Scholar] [CrossRef]
- Pan, L.; Zhou, W.; Fang, J.; Li, D. Synchronization and anti-synchronization of new uncertain fractional-order modified unified chaotic systems via novel active pinning control. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3754–3762. [Google Scholar] [CrossRef]
- Lu, J.G.; Chen, G.R. A note on the fractional-order Chen system. Chaos Solitions Fractals 2006, 27, 685–688. [Google Scholar] [CrossRef]
- Dadras, S.; Momeni, H.R. Fractional order dynamic output feedback sliding mode control design for robust stabilization of uncertain fractional-order nonlinear systems. Asian J. Control 2013, 16, 489–497. [Google Scholar] [CrossRef]
- Asheghan, M.M.; Beheshti, M.T.H.; Tavazoei, M.S. Robust synchronization of perturbed Chen’s fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1044–1051. [Google Scholar] [CrossRef]
- Xu, J.; Ji, Y.; Cui, B.T. Synchronization and anti-synchronization of time-delay chaotic system and its application to secure communication. J. Comput. Appl. 2010, 30, 2413–2416. [Google Scholar] [CrossRef]
- Shammakh, W.; Mahmoud, E.E.; Kashkari, B.S. Complex modified projective phase synchronization of nonlinear chaotic frameworks with complex variables. Alex. Eng. J. 2020, 59, 1265–1273. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.X.; Sha, W.; Yu, J. Dynamic analysis of a fractional-order Lorenz chaotic system. Nonlinear Dyn. 2009, 42, 1181–1189. [Google Scholar] [CrossRef]
- Zang, W.S.; Zhang, Q.; Su, J.P.; Feng, L. Robust Nonlinear Control Scheme for Electro-Hydraulic Force Tracking Control with Time-Varying Output Constraint. Symmetry 2021, 13, 2074. [Google Scholar] [CrossRef]
- Aly, A.A. Control of a symmetric chaotic supply chain system using a new fixed-time super-twisting sliding mode technique subject to control input limitations. Symmetry 2021, 13, 1257. [Google Scholar]
- Rajchakit, G.; Sriraman, R.; Kaewmesri, P.; Chanthorn, P.; Lim, C.P.; Samidurai, R. An Extended Analysis on Robust Dissipativity of Uncertain Stochastic Generalized Neural Networks with Markovian Jumping Parameters. Symmetry 2020, 12, 1035. [Google Scholar]
- Chen, H.; He, S.; Pano Azucena, A.D.; Yousefpour, A.; Jahanshahi, H.; López, M.A.; Alcaraz, R. A Multistable Chaotic Jerk System with Coexisting and Hidden Attractors: Dynamical and Complexity Analysis, FPGA-Based Realization, and Chaos Stabilization Using a Robust Controller. Symmetry 2020, 12, 569. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Song, C.; Yan, A.; Wang, G. Complete Synchronization and Partial Anti-Synchronization of Complex Lü Chaotic Systems by the UDE-Based Control Method. Symmetry 2022, 14, 517. https://doi.org/10.3390/sym14030517
Wang Z, Song C, Yan A, Wang G. Complete Synchronization and Partial Anti-Synchronization of Complex Lü Chaotic Systems by the UDE-Based Control Method. Symmetry. 2022; 14(3):517. https://doi.org/10.3390/sym14030517
Chicago/Turabian StyleWang, Zuoxun, Cong Song, An Yan, and Guijuan Wang. 2022. "Complete Synchronization and Partial Anti-Synchronization of Complex Lü Chaotic Systems by the UDE-Based Control Method" Symmetry 14, no. 3: 517. https://doi.org/10.3390/sym14030517
APA StyleWang, Z., Song, C., Yan, A., & Wang, G. (2022). Complete Synchronization and Partial Anti-Synchronization of Complex Lü Chaotic Systems by the UDE-Based Control Method. Symmetry, 14(3), 517. https://doi.org/10.3390/sym14030517