
Magnetic Circuit Analysis of Halbach Array and Improvement of Permanent Magnetic Adsorption Device for Wall-Climbing Robot


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
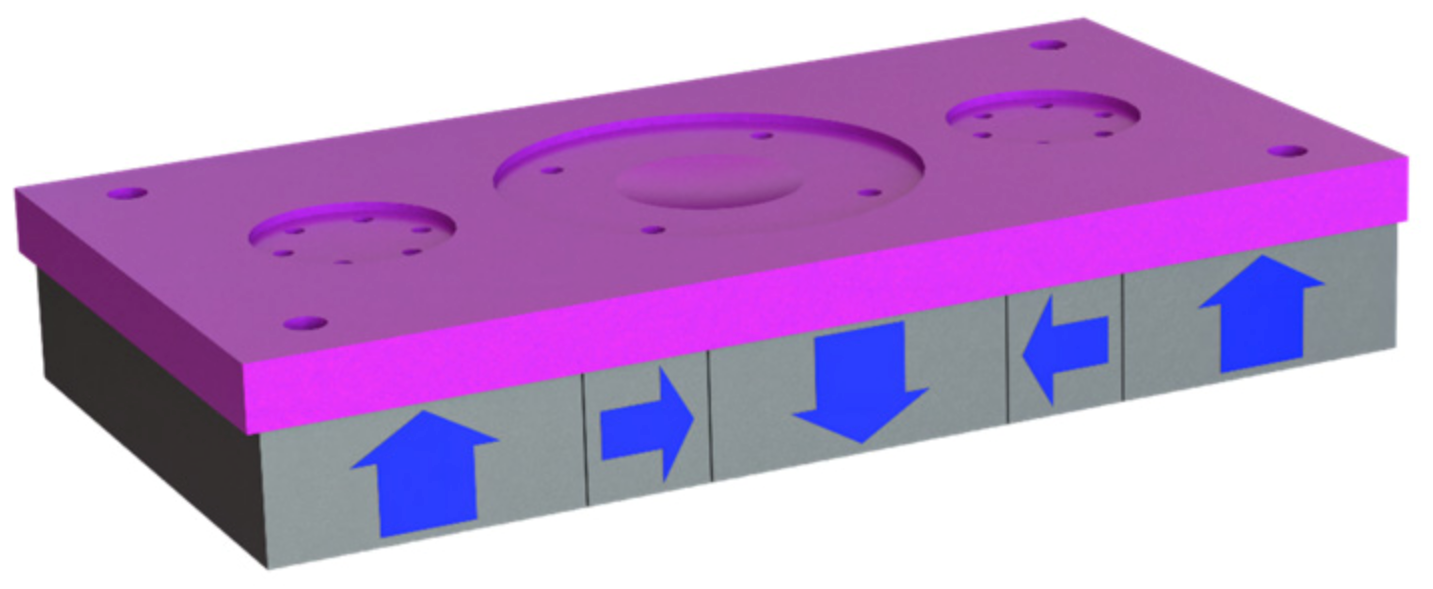
2. Theoretical Analysis of Halbach Array Magnetic Circuit
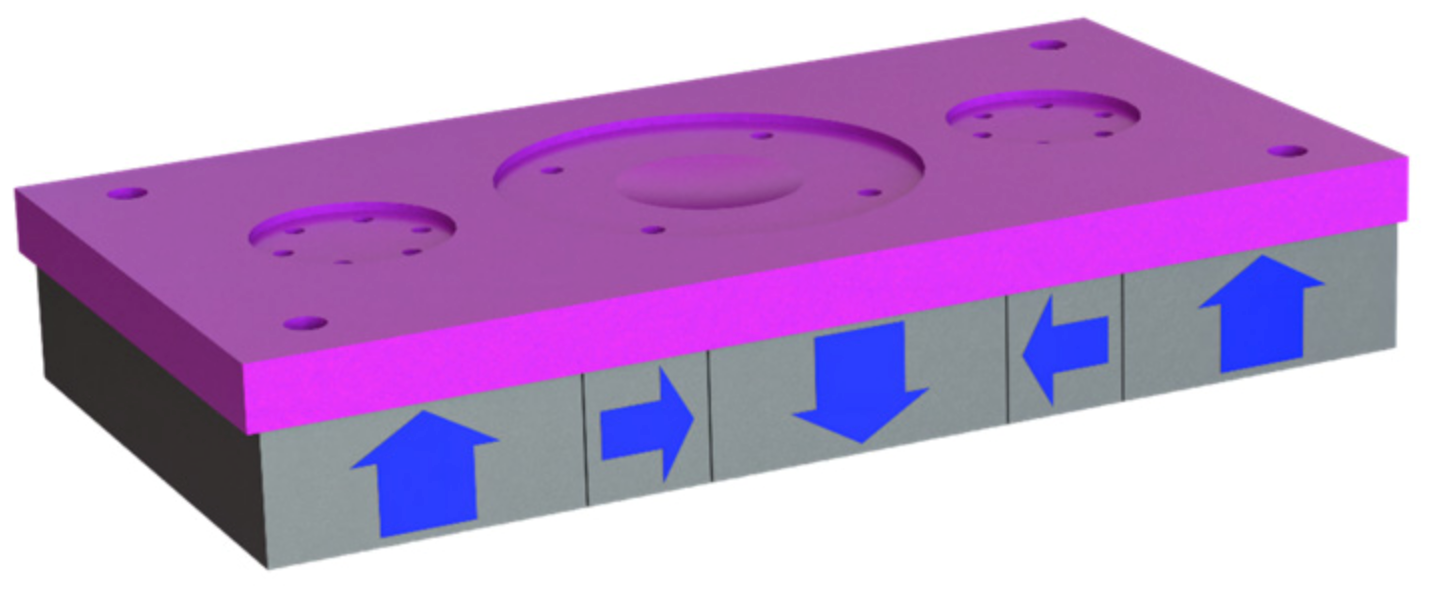
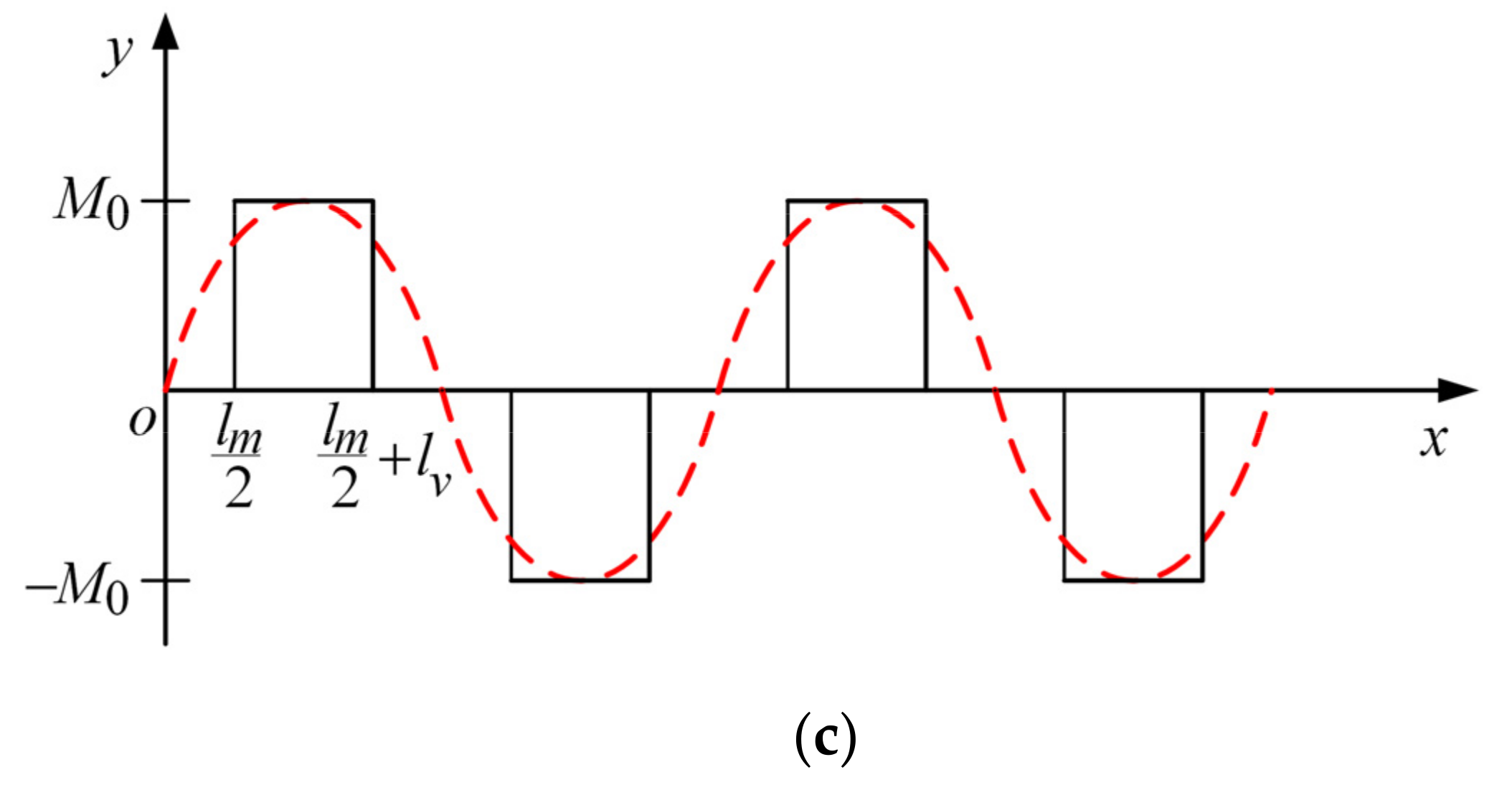
2.1. Establishment of the Mathematical Model of the Magnetic Circuit
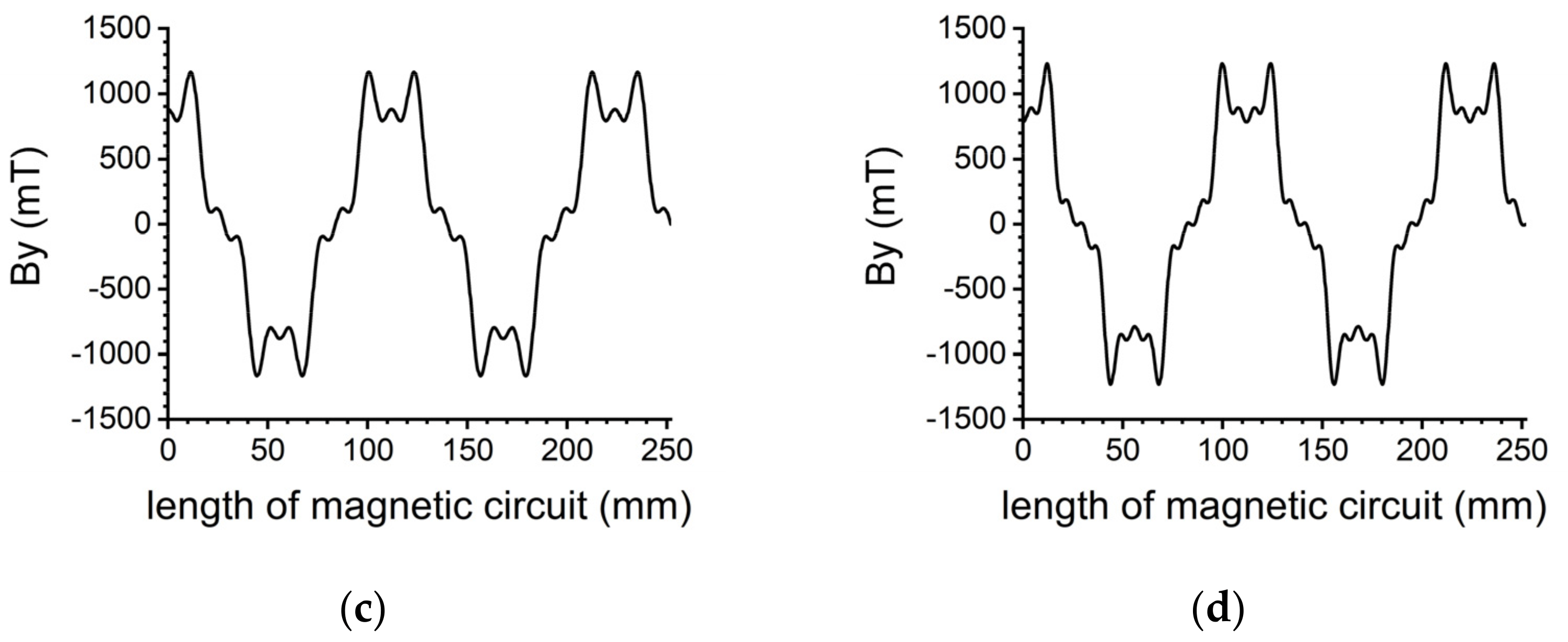
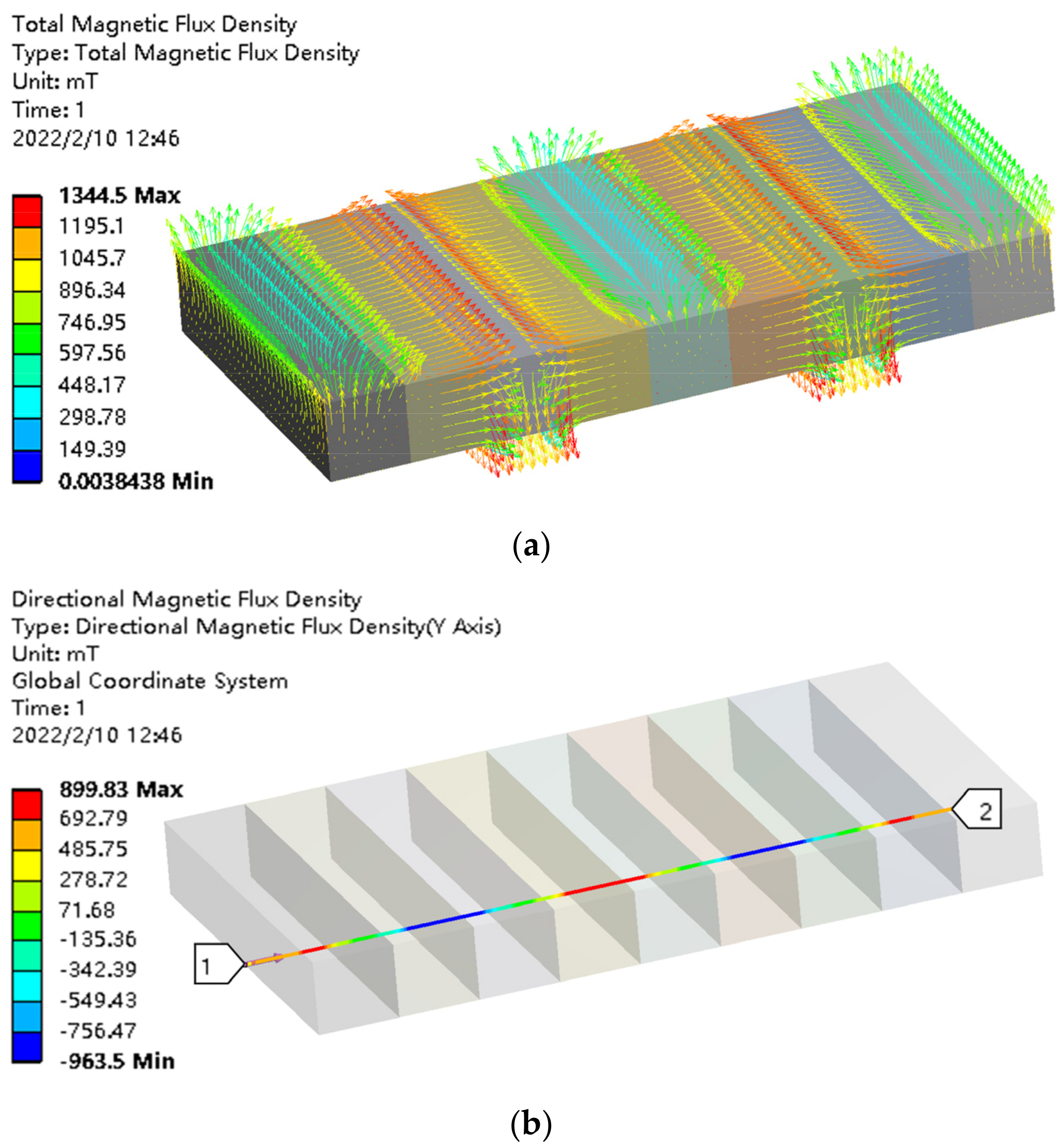
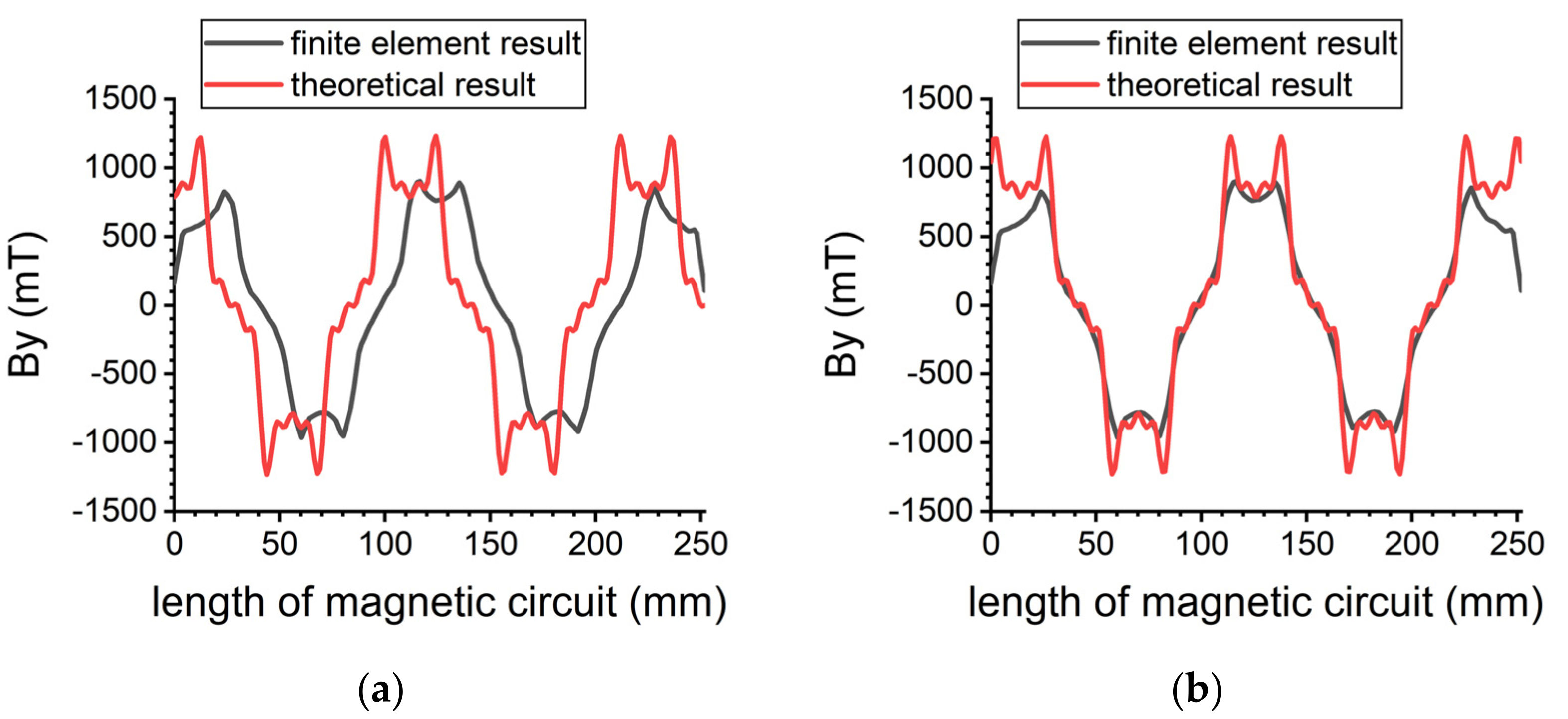
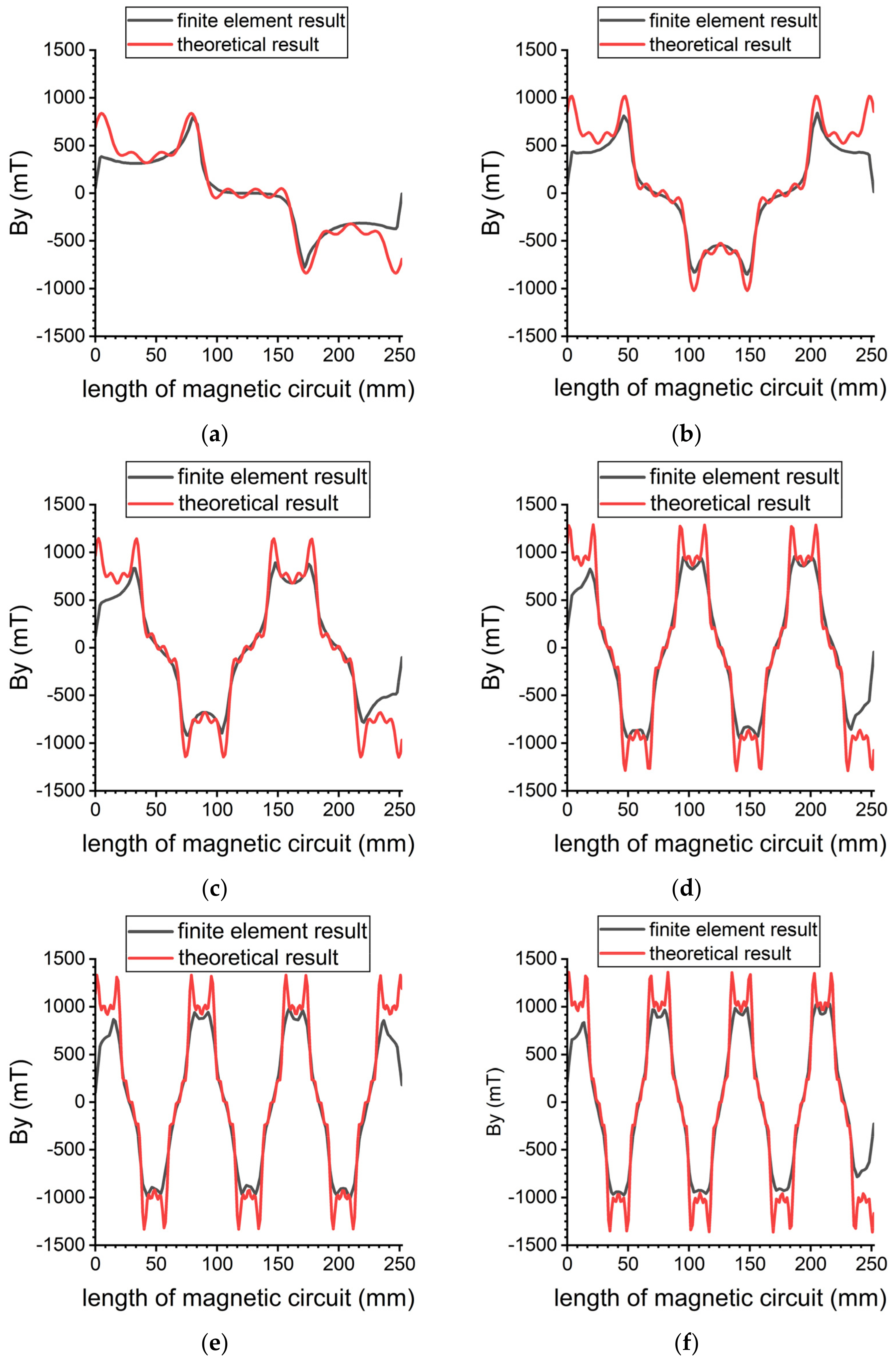
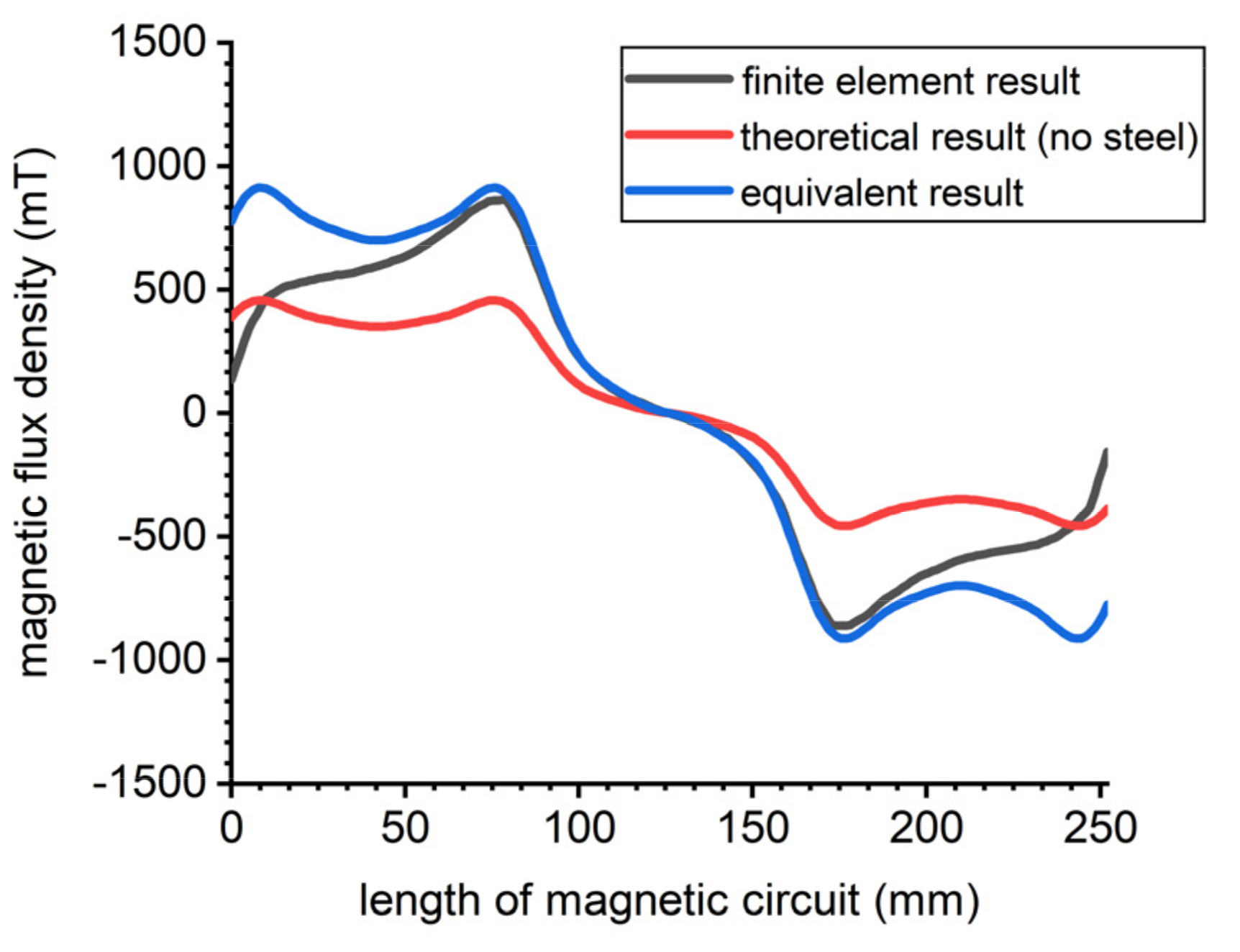
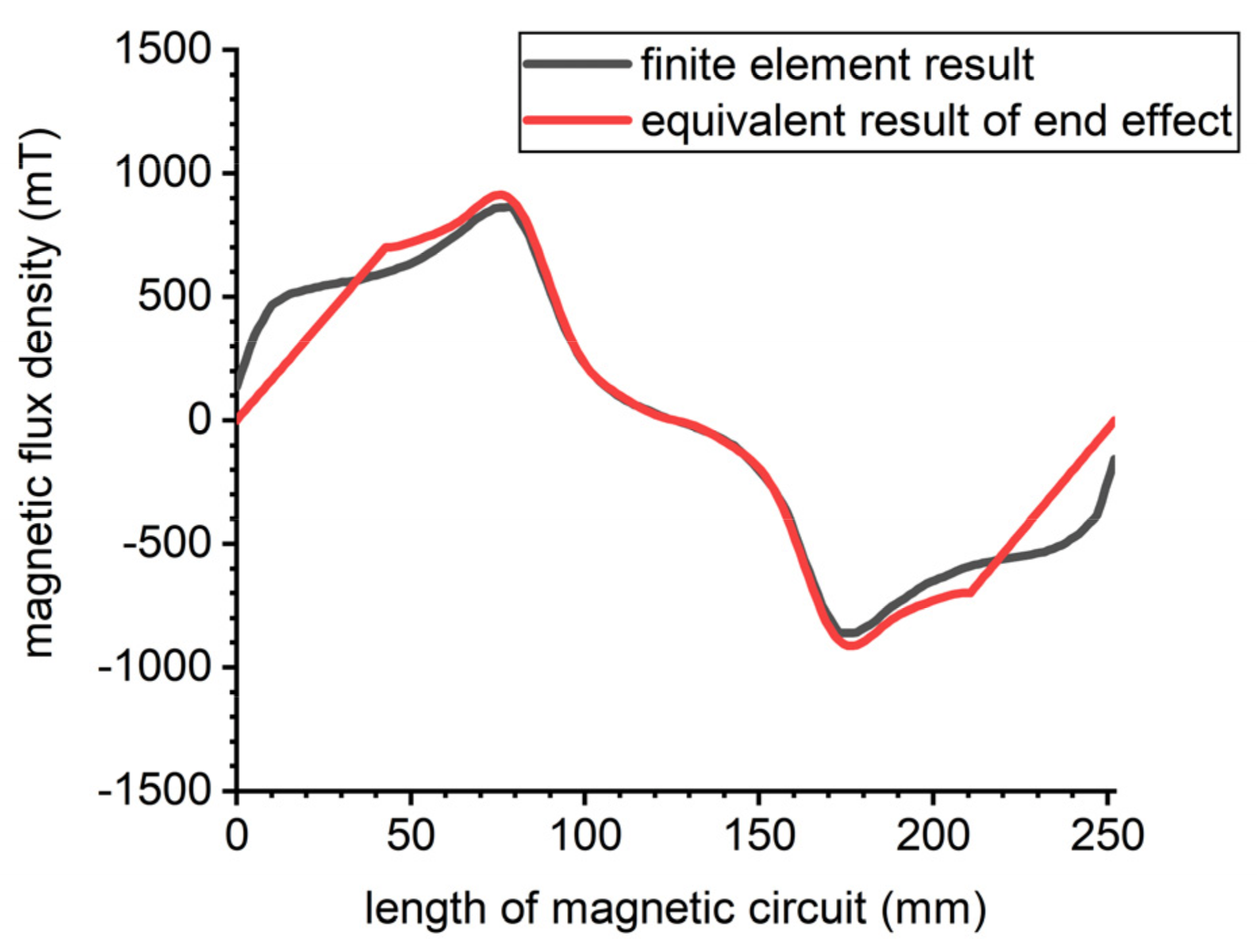
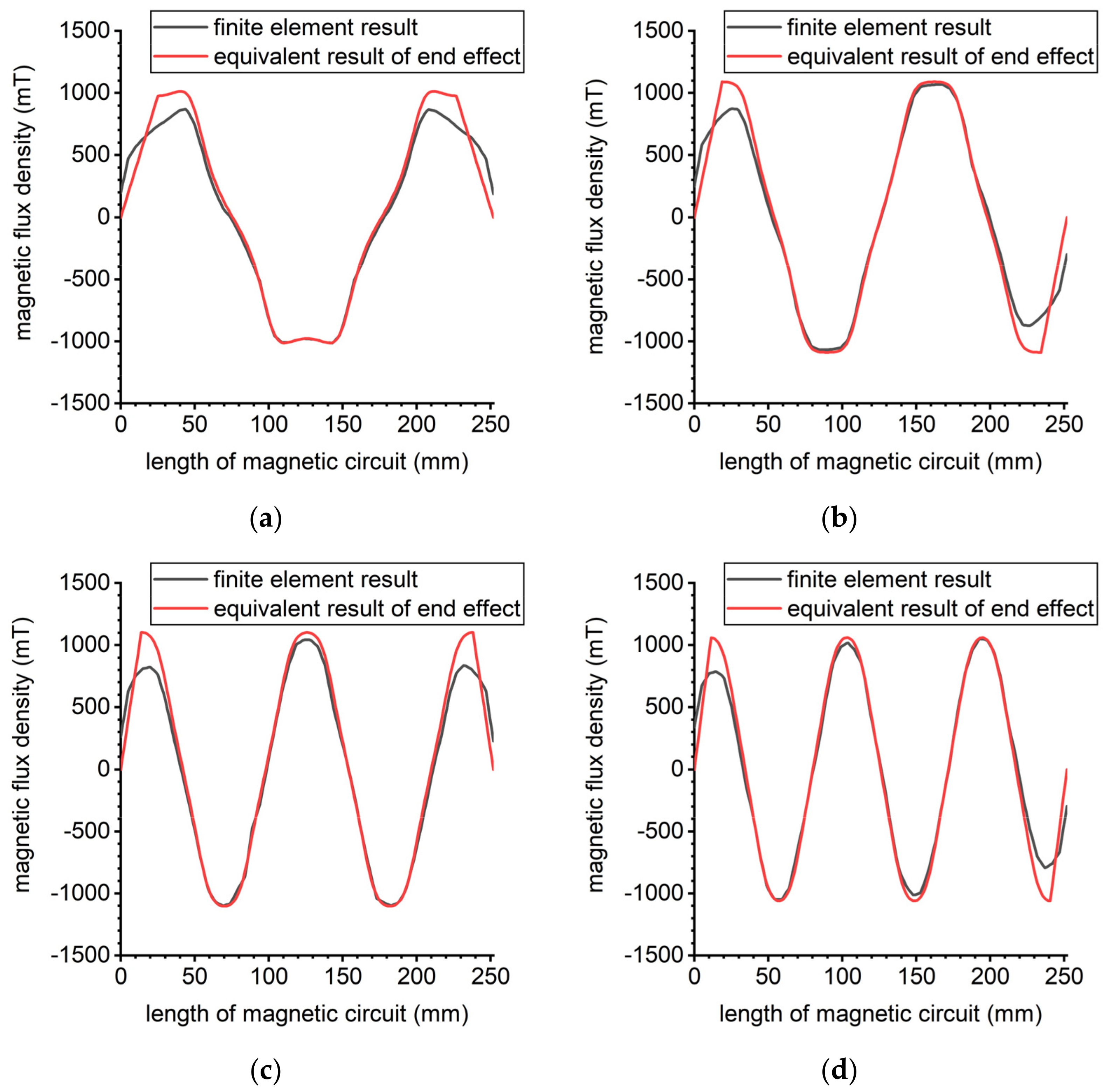
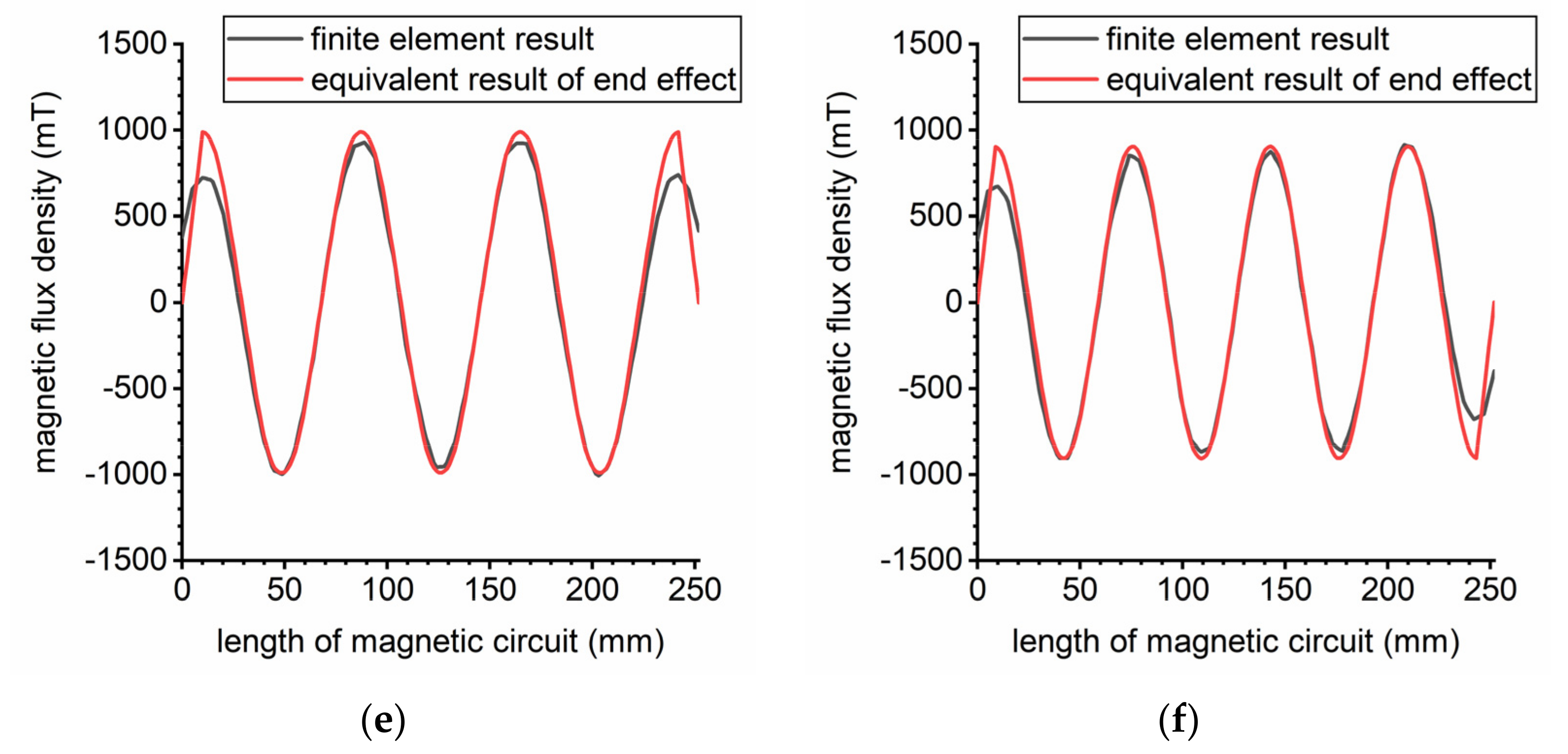
2.2. Calculation of Magnetic Flux Density
3. Magnetic Force Calculation of Adsorption Device
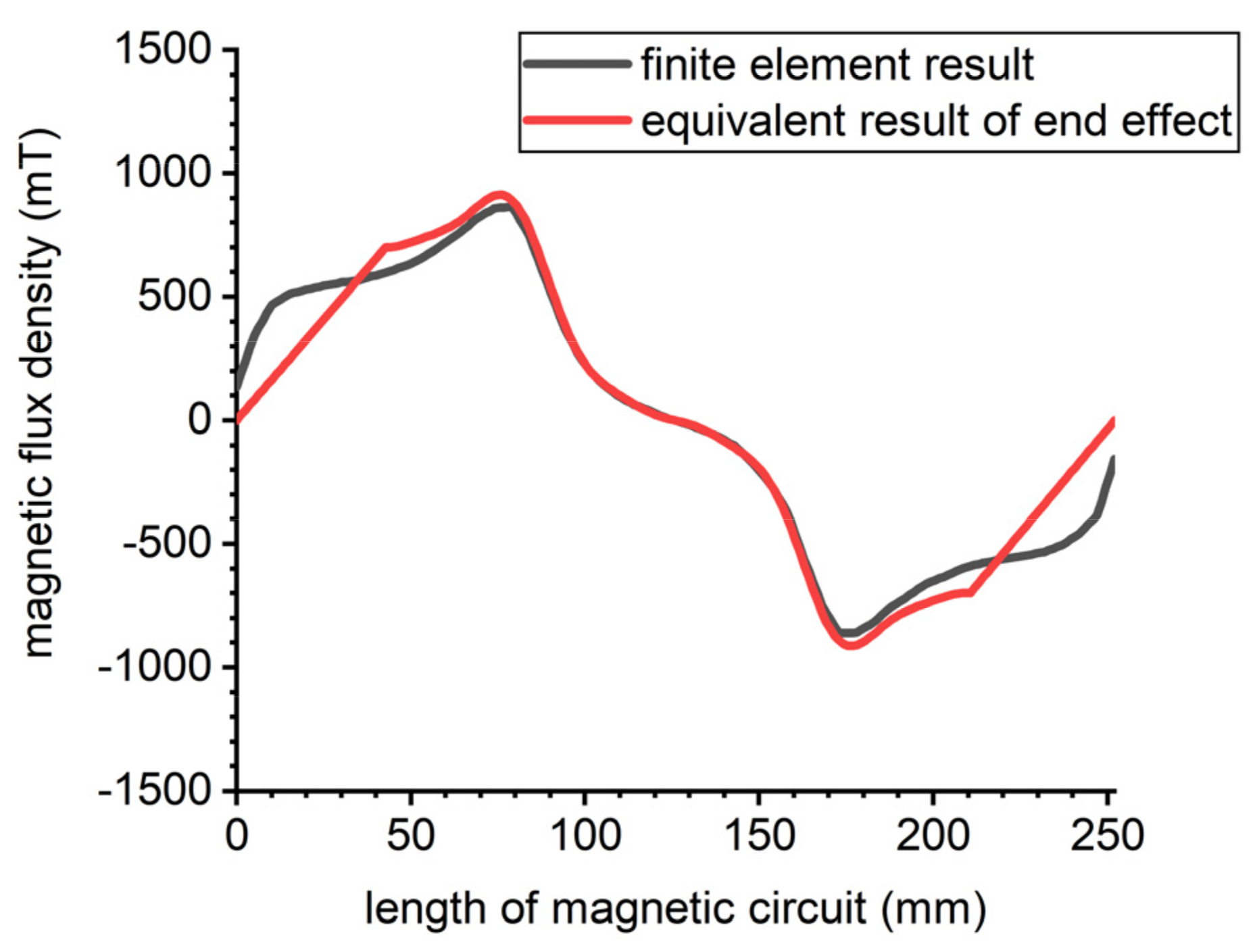
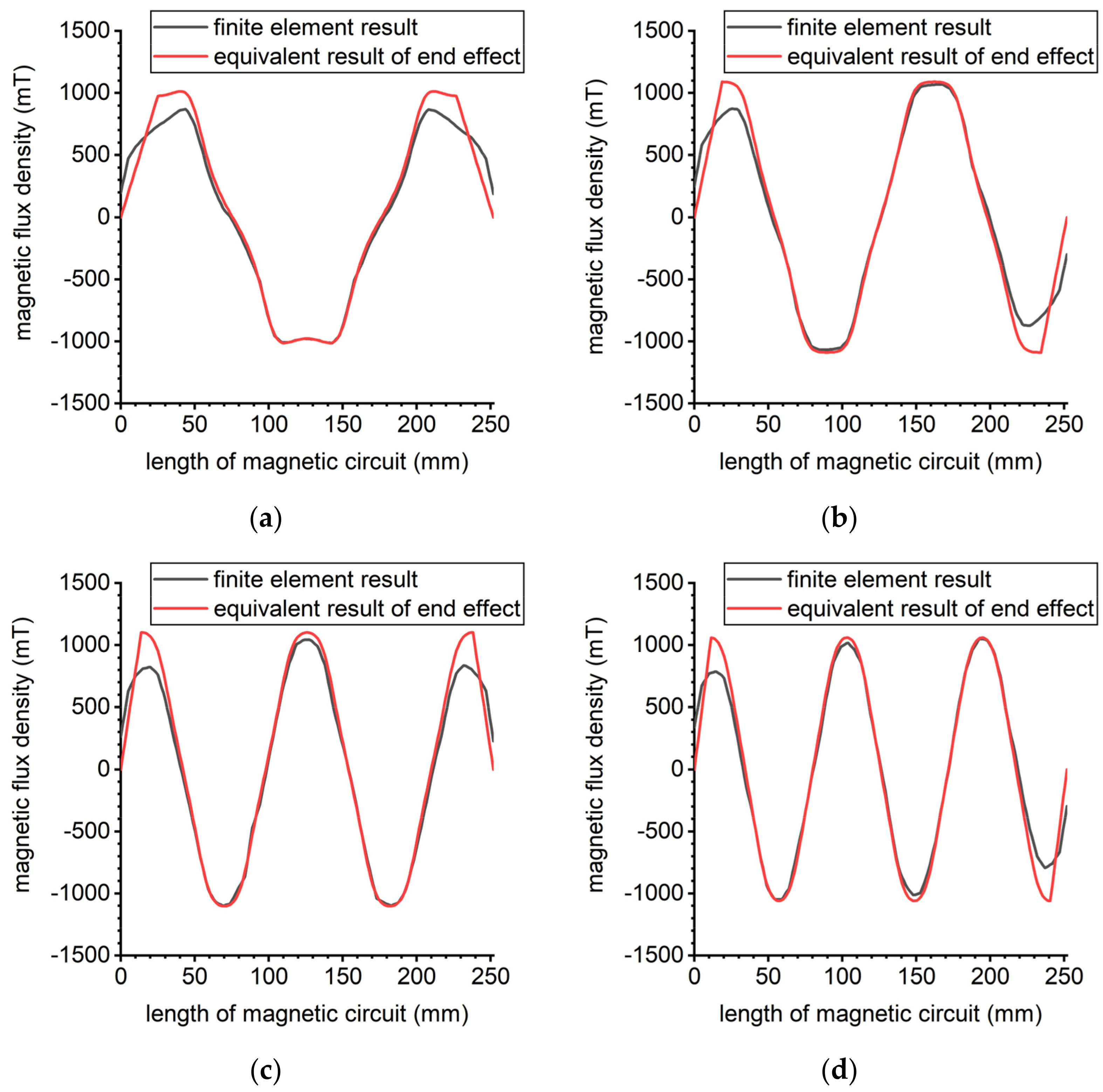
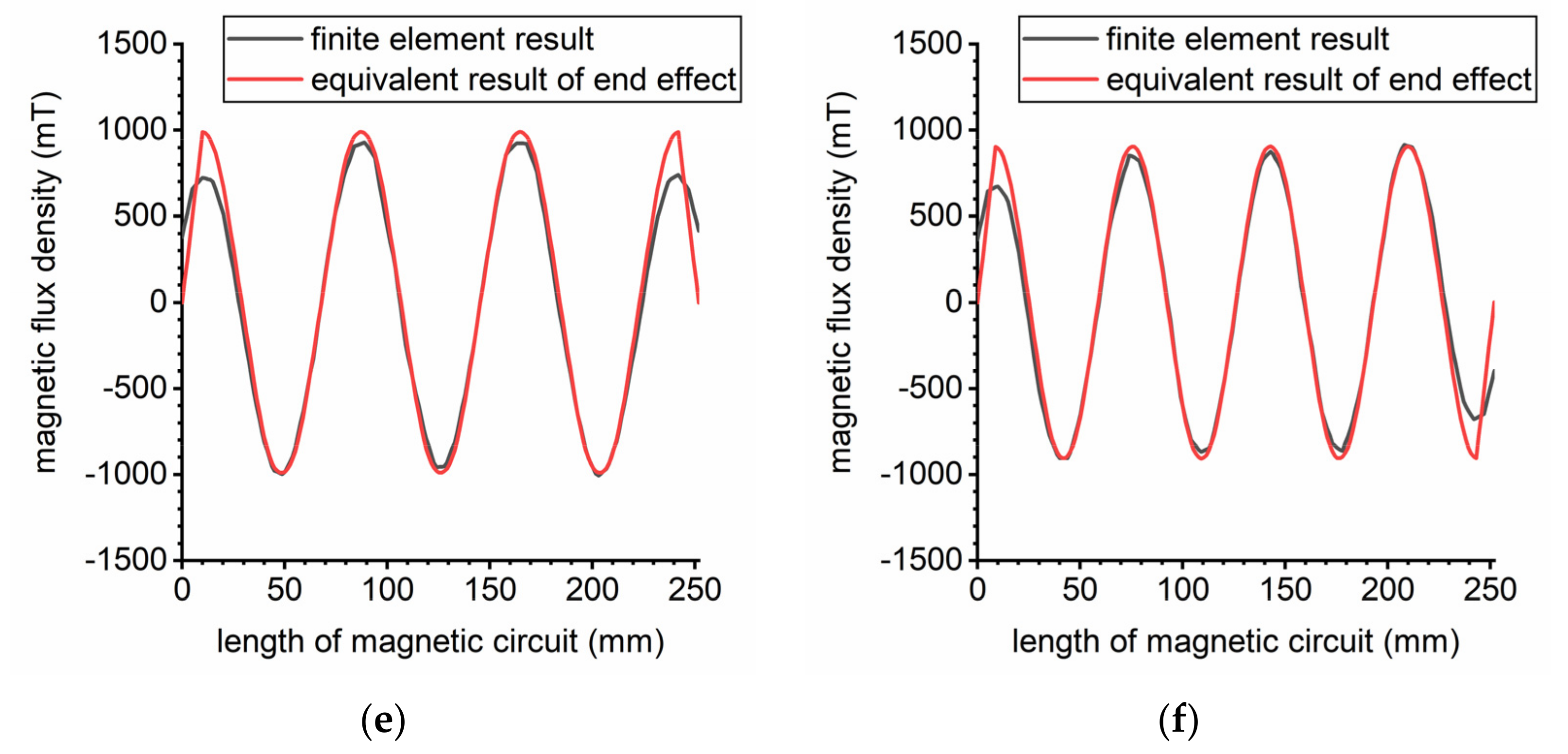
3.1. Equivalent Magnetic Flux Density
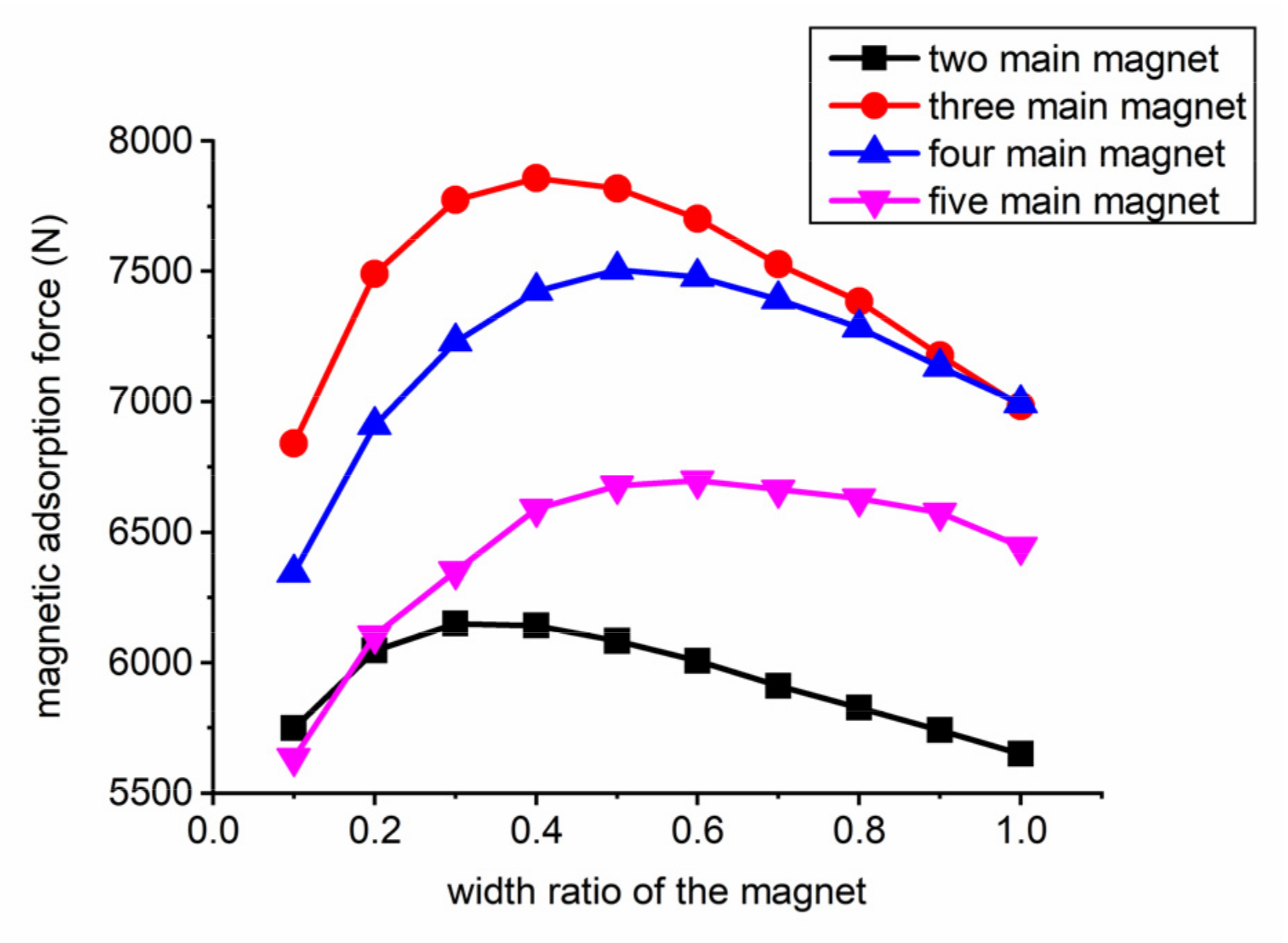
3.2. Calculation of Magnetic Adsorption Force
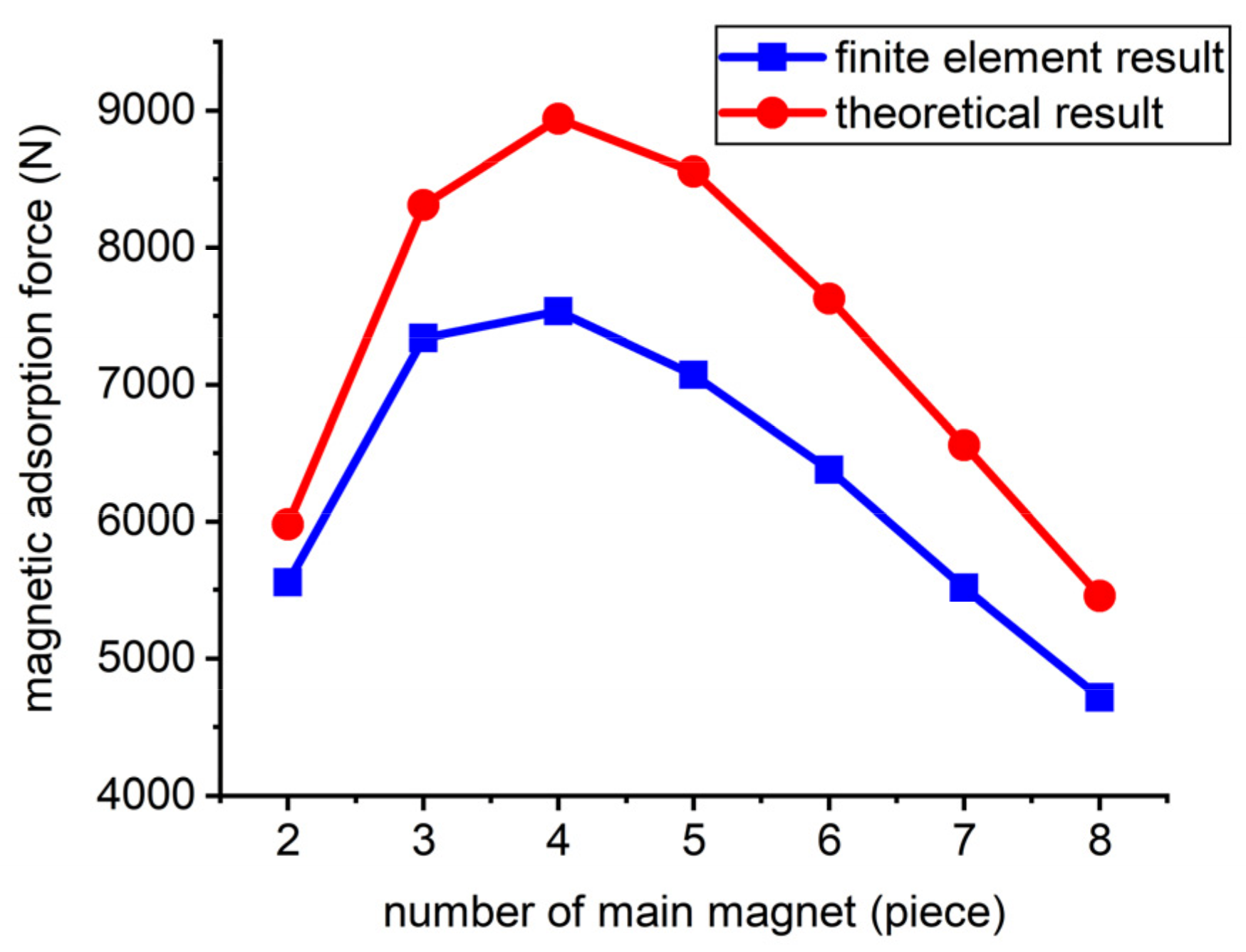
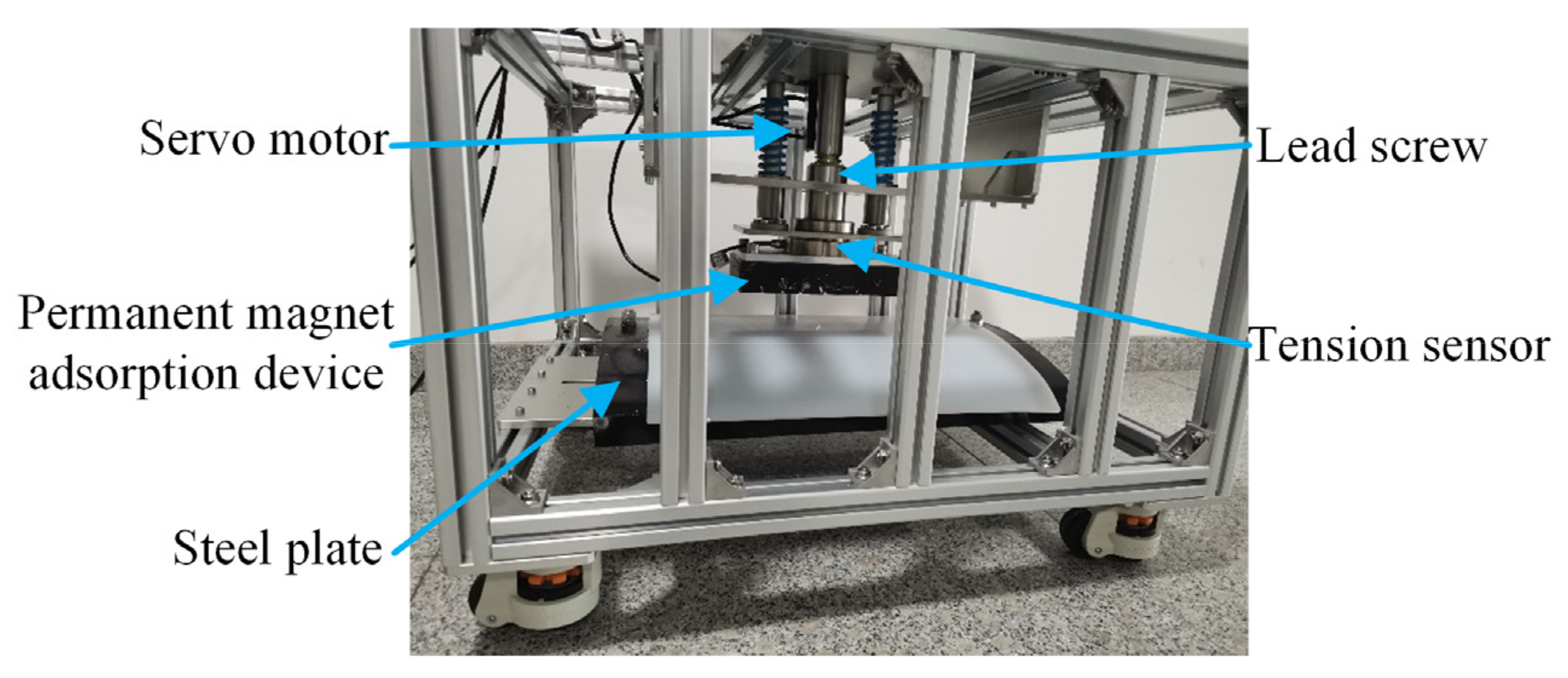
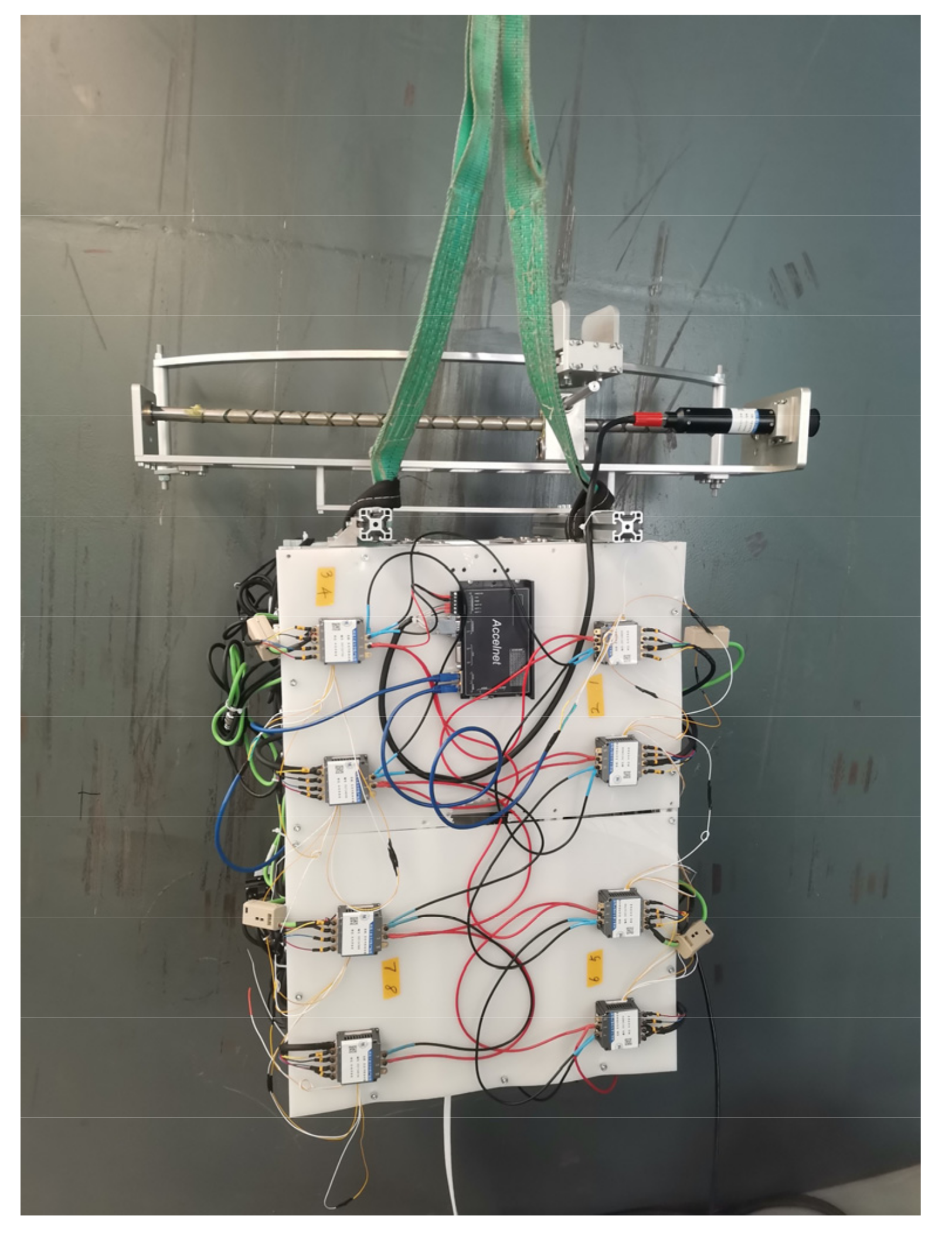
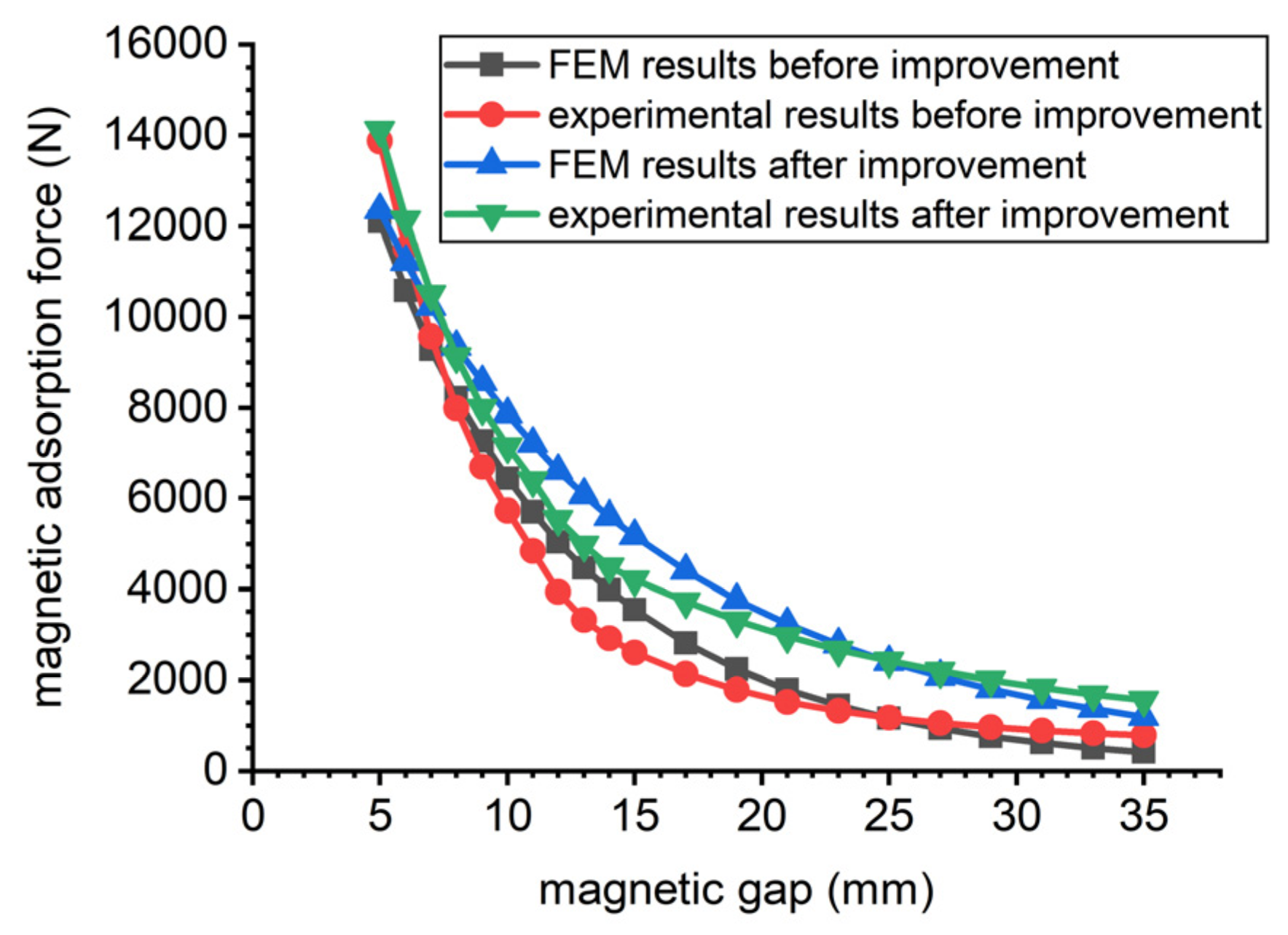
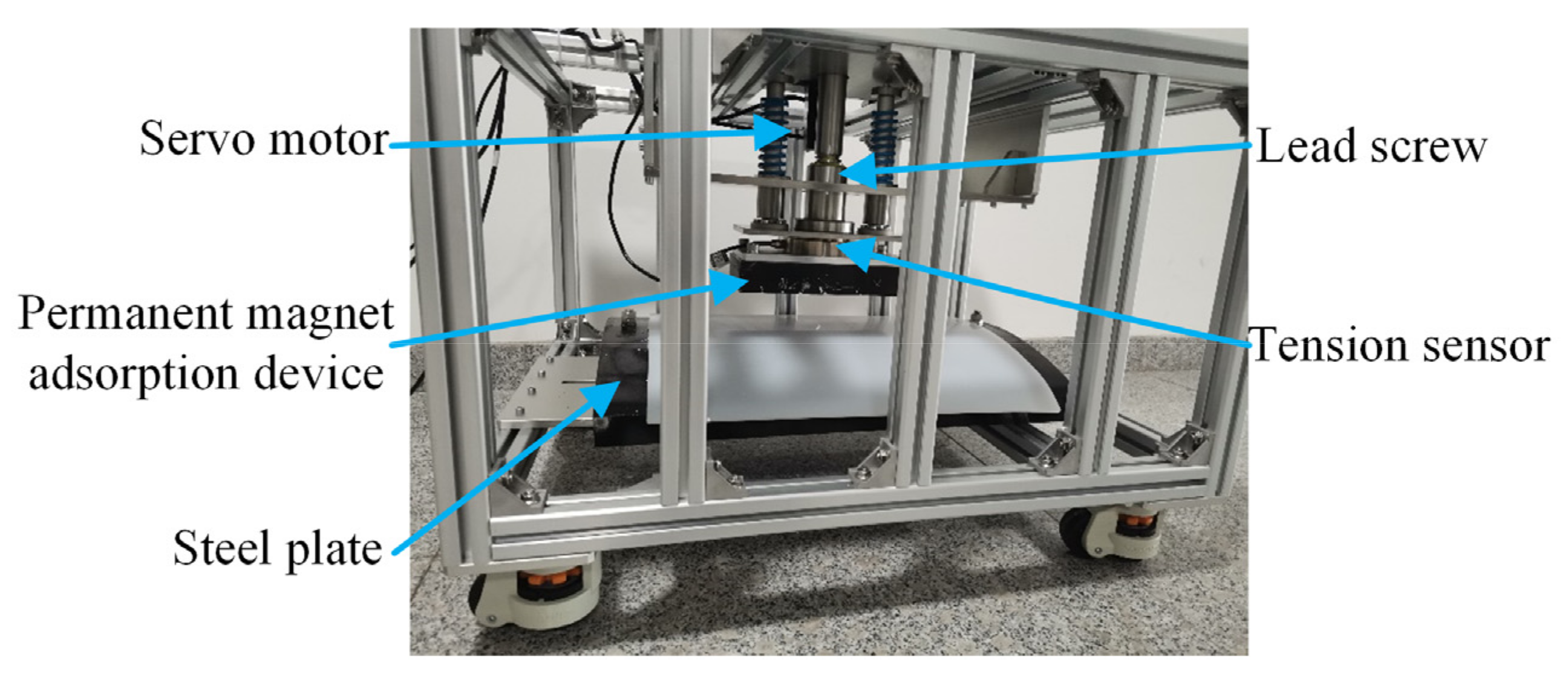
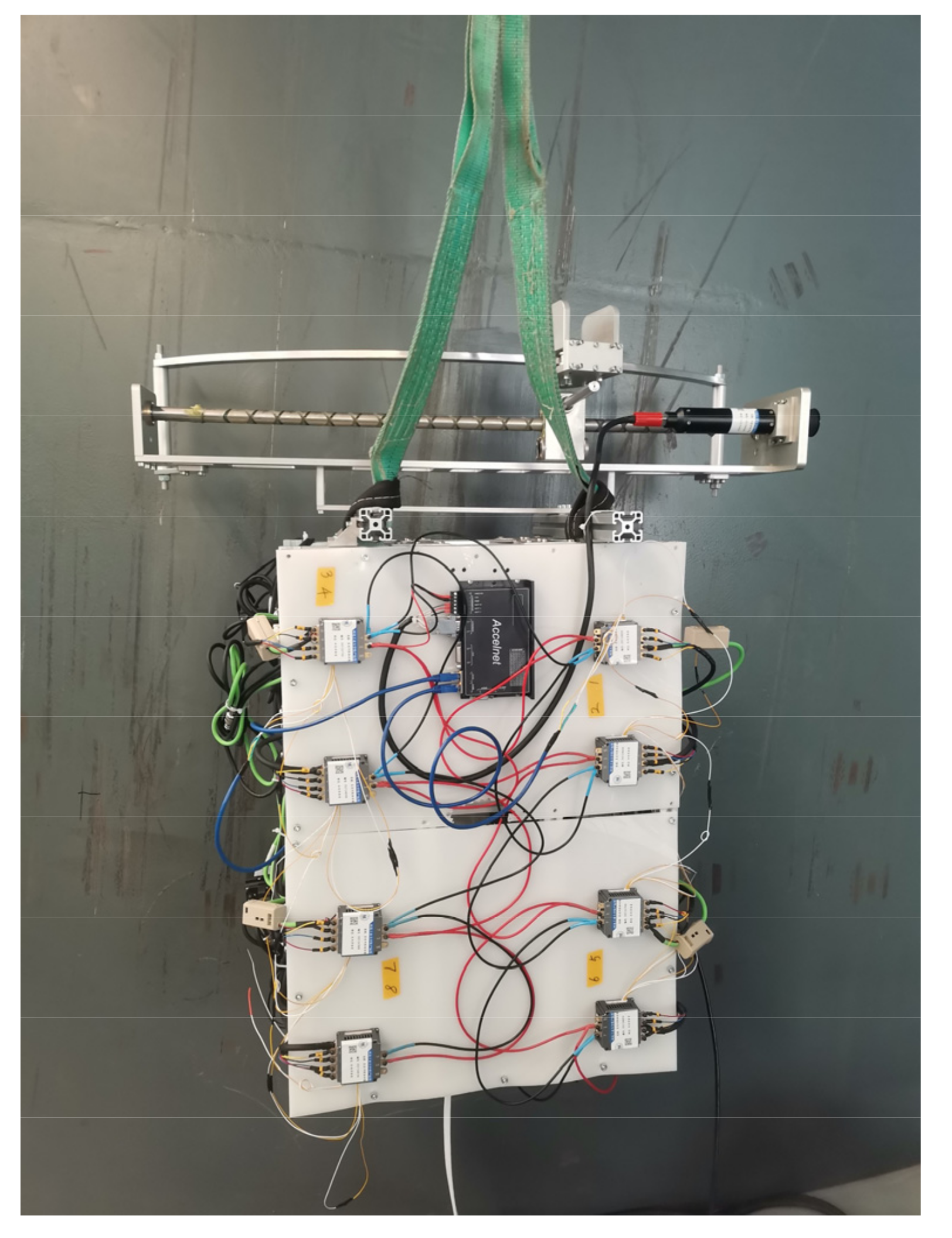
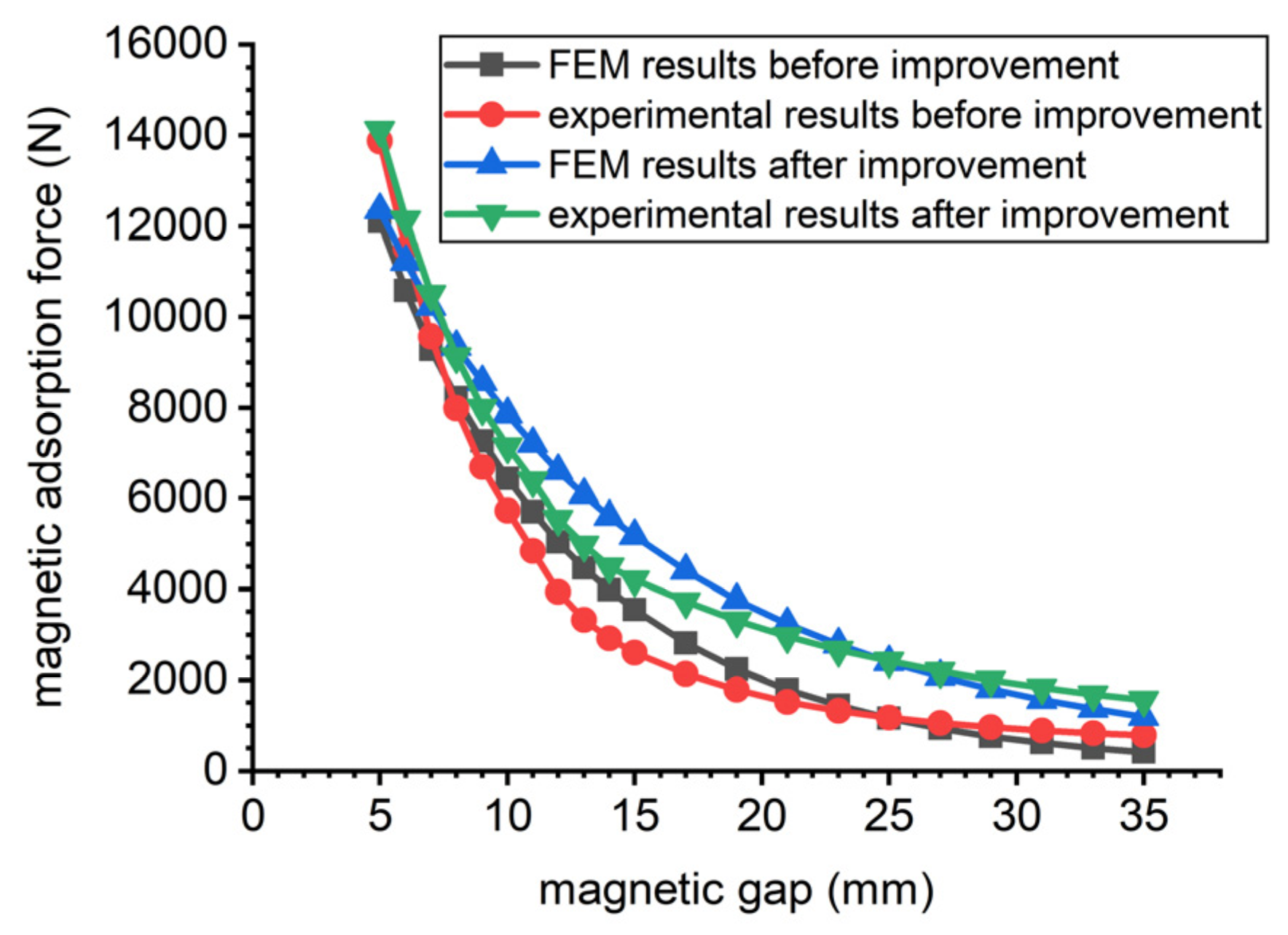
4. Experimental Verification
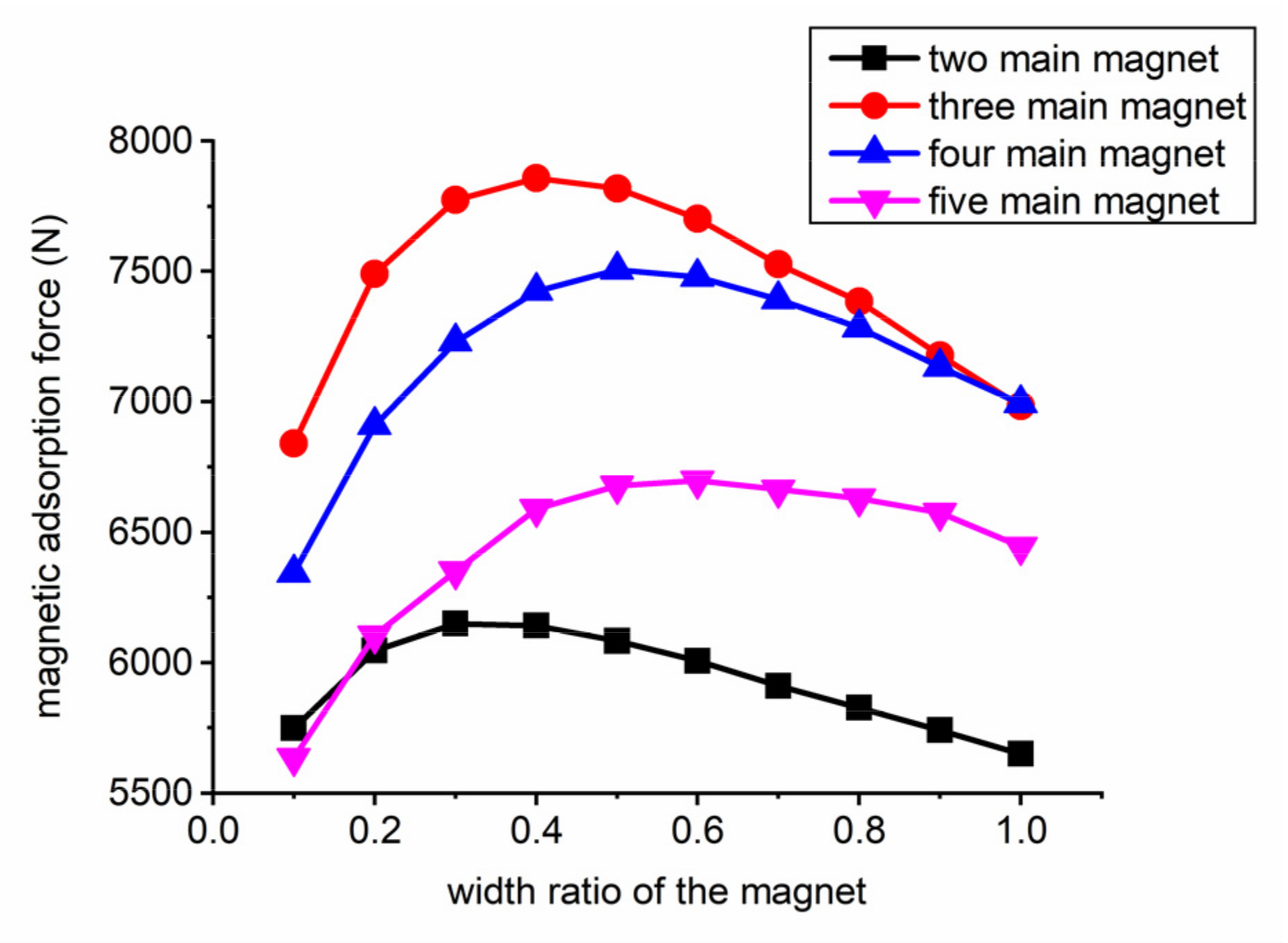
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Song, C.; Cui, W. Review of Underwater Ship Hull Cleaning Technologies. J. Mar. Sci. Appl. 2020, 19, 415–429. [Google Scholar] [CrossRef]
- Wang, S. Research status and future development of wall-climbing robot. In Proceedings of the 2021 International Conference on Electronics, Circuits and Information Engineering (ECIE), Zhengzhou, China, 22–24 January 2021; pp. 122–130. [Google Scholar] [CrossRef]
- Schmidt, D.; Berns, K. Climbing robots for maintenance and inspections of vertical structures—A survey of design aspects and technologies. Rob. Auton. Syst. 2013, 61, 1288–1305. [Google Scholar] [CrossRef]
- Liang, P.; Gao, X.; Zhang, Q.; Gao, R.; Li, M.; Xu, Y.; Zhu, W. Design and stability analysis of a wall-climbing robot using propulsive force of propeller. Symmetry 2021, 13, 37. [Google Scholar] [CrossRef]
- Kindl, V.; Hruska, K.; Pechanek, R.; Skala, B. Redesign of an Undercarriage Wheel for a Self-Acting Robot. IEEE Trans. Magn. 2016, 52, 1–5. [Google Scholar] [CrossRef]
- Huang, H.; Li, D.; Xue, Z.; Chen, X.L.; Liu, S.; Leng, J.; Wei, Y. Design and performance analysis of a tracked wall-climbing robot for ship inspection in shipbuilding. Ocean Eng. 2017, 131, 224–230. [Google Scholar] [CrossRef]
- Hu, J.; Han, X.; Tao, Y.; Feng, S. A magnetic crawler wall-climbing robot with capacity of high payload on the convex surface. Rob. Auton. Syst. 2021, 148, 103907. [Google Scholar] [CrossRef]
- Gao, S.; Hou, R.; Li, J.; Pan, Y.; He, S.; Li, H. Magnetic Field Analysis and Structure Design of a New Magnetic Wheel for Wall-Climbing Robot. J. Supercond. Nov. Magn. 2021, 35, 529–537. [Google Scholar] [CrossRef]
- Zhao, Z.; Tao, Y.; Wang, J.; Hu, J. The multi-objective optimization design for the magnetic adsorption unit of wall-climbing robot. J. Mech. Sci. Technol. 2022, 36, 305–316. [Google Scholar] [CrossRef]
- Wu, M.; Pan, G.; Zhang, T.; Chen, S.; Zhuang, F.; Yan-Zheng, Z. Design and optimal research of a non-contact adjustable magnetic adhesion mechanism for a wall-climbing welding robot. Int. J. Adv. Robot. Syst. 2013, 10, 63. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.; Gao, X.; Fu, Z.; Zhao, Y.; Chen, S. The mechanism design of a wheeled climbing welding robot with passing obstacles capability. Lect. Notes Electr. Eng. 2011, 88, 401–409. [Google Scholar] [CrossRef]
- Mallinson, J.C. One-Sided Fluxes—A Magnetic Curiosity? IEEE Trans. Magn. 1973, 9, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Halbach, K. Strong rare earth cobalt quadrupoles. IEEE Trans. Nucl. Sci. 1979, 26, 3882–3884. [Google Scholar] [CrossRef]
- Yu, J.; Deng, Z.; Li, H.; Ma, S.; Zhao, J.; Wang, L. Vibration Suppression of High-Temperature Superconducting Maglev System via Electromagnetic Shunt Damper. J. Supercond. Nov. Magn. 2019, 32, 2819–2828. [Google Scholar] [CrossRef]
- Luo, C.; Zhang, K.; Duan, J.; Jing, Y. Study of Permanent Magnet Electrodynamic Suspension System with a Novel Halbach Array. J. Electr. Eng. Technol. 2020, 15, 969–977. [Google Scholar] [CrossRef]
- Golovanov, D.; Gerada, C. An Analytical Subdomain Model for Dual-Rotor Permanent Magnet Motor with Halbach Array. IEEE Trans. Magn. 2019, 55, 1–16. [Google Scholar] [CrossRef]
- Jing, L.; Pan, Y.; Wang, T.; Qu, R.; Cheng, P.T. Transient Analysis and Verification of a Magnetic Gear Integrated Permanent Magnet Brushless Machine with Halbach Arrays. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 6777, 1–10. [Google Scholar] [CrossRef]
- Hoburg, J.F. Modeling Maglev Passenger Compartment Static Magnetic Fields From Linear Halbach Permanent-Magnet Arrays. IEEE Trans. Magn. 2004, 40, 59–64. [Google Scholar] [CrossRef]
- Meessen, K.J.; Gysen, B.L.J.; Paulides, J.J.H.; Lomonova, E.A. Three-dimensional magnetic field modeling of a cylindrical halbach array. IEEE Trans. Magn. 2010, 46, 1733–1736. [Google Scholar] [CrossRef]
- Qu, C.; Chen, Y.; Zhen, P.; Li, X. A Study on Magnetic Force Characteristics Between Two Cuboidal Permanent Magnets. J. Supercond. Nov. Magn. 2021, 34, 2441–2454. [Google Scholar] [CrossRef]
- Huang, R.; Liu, C.; Song, Z.; Zhao, H. Design and analysis of a novel axial-radial flux permanent magnet machine with Halbach-Array permanent magnets. Energies 2021, 14, 3639. [Google Scholar] [CrossRef]
- Wei, L.; Nakamura, T. A Novel Dual-Stator Hybrid Excited Permanent Magnet Vernier Machine with Halbach-Array PMs. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Tumanski, S. Handbook of Magnetic Measurements; CRC Press: Boca Raton, FL, USA, 2016; pp. 47–79. [Google Scholar]
- Prashanth, N.A. Flux maximization in wind turbine permanent magnet synchronous generator made of NdFeB permanent magnets. Mater. Today Proc. 2021, 49, 731–737. [Google Scholar] [CrossRef]
- Zhang, H.; Shen, Y.; Han, Y. Electromagnetic Fields and Waves, 2nd ed.; Tsinghua University Press: Beijing, China, 2016; pp. 87–90. [Google Scholar]
- Furlani, E.P. Permanent Magnet and Electromechanical Devices: Materials, Analysis, and Applications; Academic Press: New York, NY, USA, 2001; pp. 107–116. [Google Scholar]
- Thakur, N.; Han, C.Y. An ambient intelligence-based human behavior monitoring framework for ubiquitous environments. Information 2021, 12, 81. [Google Scholar] [CrossRef]
- Dziob, D.; Ramian, J.; Ramian, J.; Lisowski, B.; Laska, J. Design and construction of a chamber enabling the observation of living cells in the field of a constant magnetic force. Cells 2021, 10, 3339. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, S.; Zhang, X.; Zhang, X.; Jia, J.; Zhang, M. Magnetic Circuit Analysis of Halbach Array and Improvement of Permanent Magnetic Adsorption Device for Wall-Climbing Robot. Symmetry 2022, 14, 429. https://doi.org/10.3390/sym14020429
Jiao S, Zhang X, Zhang X, Jia J, Zhang M. Magnetic Circuit Analysis of Halbach Array and Improvement of Permanent Magnetic Adsorption Device for Wall-Climbing Robot. Symmetry. 2022; 14(2):429. https://doi.org/10.3390/sym14020429
Chicago/Turabian StyleJiao, Shilong, Xiaojun Zhang, Xuan Zhang, Jidong Jia, and Minglu Zhang. 2022. "Magnetic Circuit Analysis of Halbach Array and Improvement of Permanent Magnetic Adsorption Device for Wall-Climbing Robot" Symmetry 14, no. 2: 429. https://doi.org/10.3390/sym14020429
APA StyleJiao, S., Zhang, X., Zhang, X., Jia, J., & Zhang, M. (2022). Magnetic Circuit Analysis of Halbach Array and Improvement of Permanent Magnetic Adsorption Device for Wall-Climbing Robot. Symmetry, 14(2), 429. https://doi.org/10.3390/sym14020429